Variational Specific Mode Extraction: A Novel Method for Defect Signal Detection of Ferromagnetic Pipeline


Abstract
1. Introduction
2. Theoretical Background
2.1. Signal Model
2.2. Bandwidth of the Specific Mode
2.3. Matching Demodulation Transform
3. Variational Specific Mode Extraction
3.1. Main Idea
3.2. Algorithm
| Algorithm 1.VSME |
| Initialize repeat for to end for until |
3.3. Performance Analysis
4. Results and Analysis
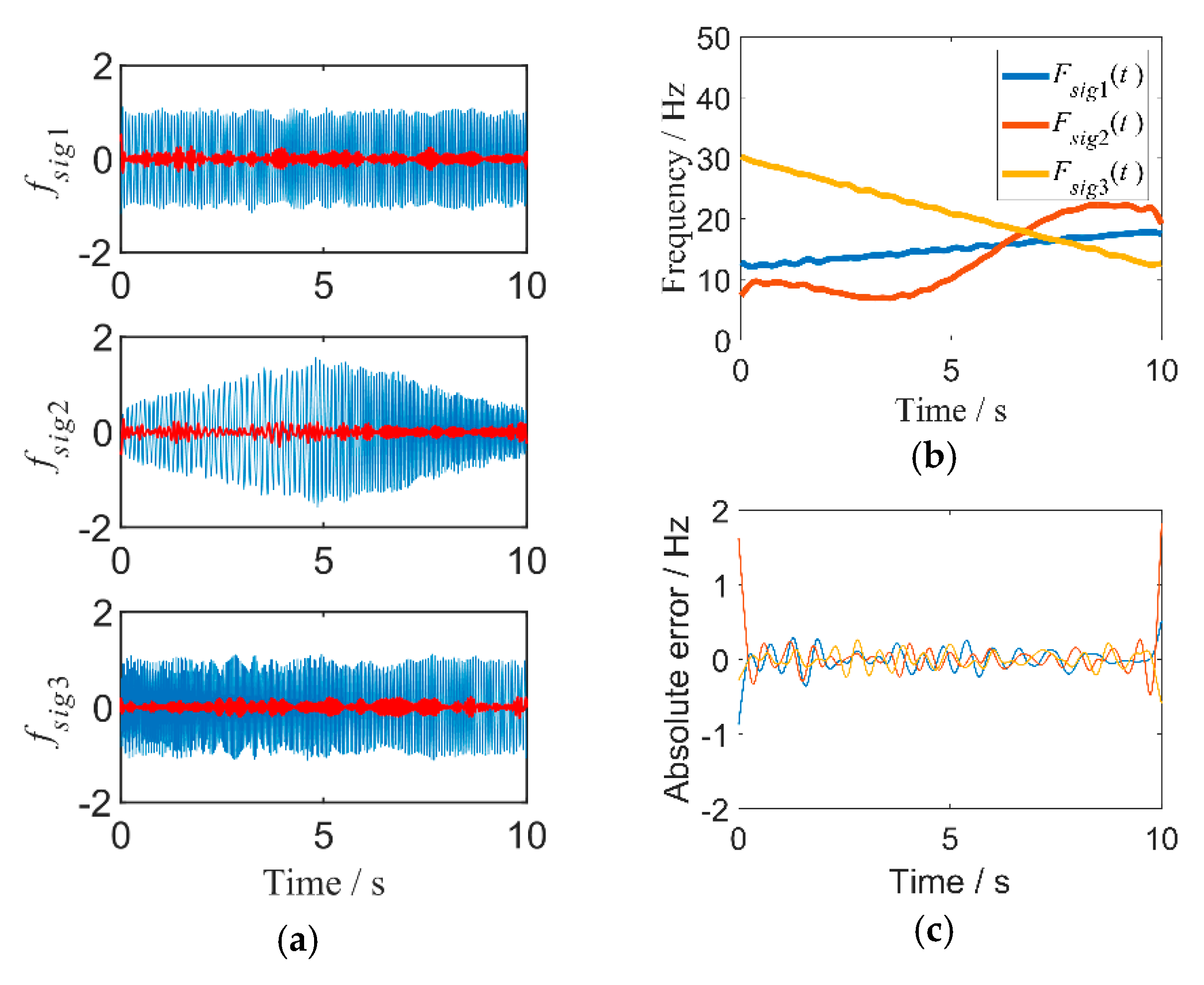
4.1. Method Validation
4.2. Experimental Results
4.2.1. Experimental Setup
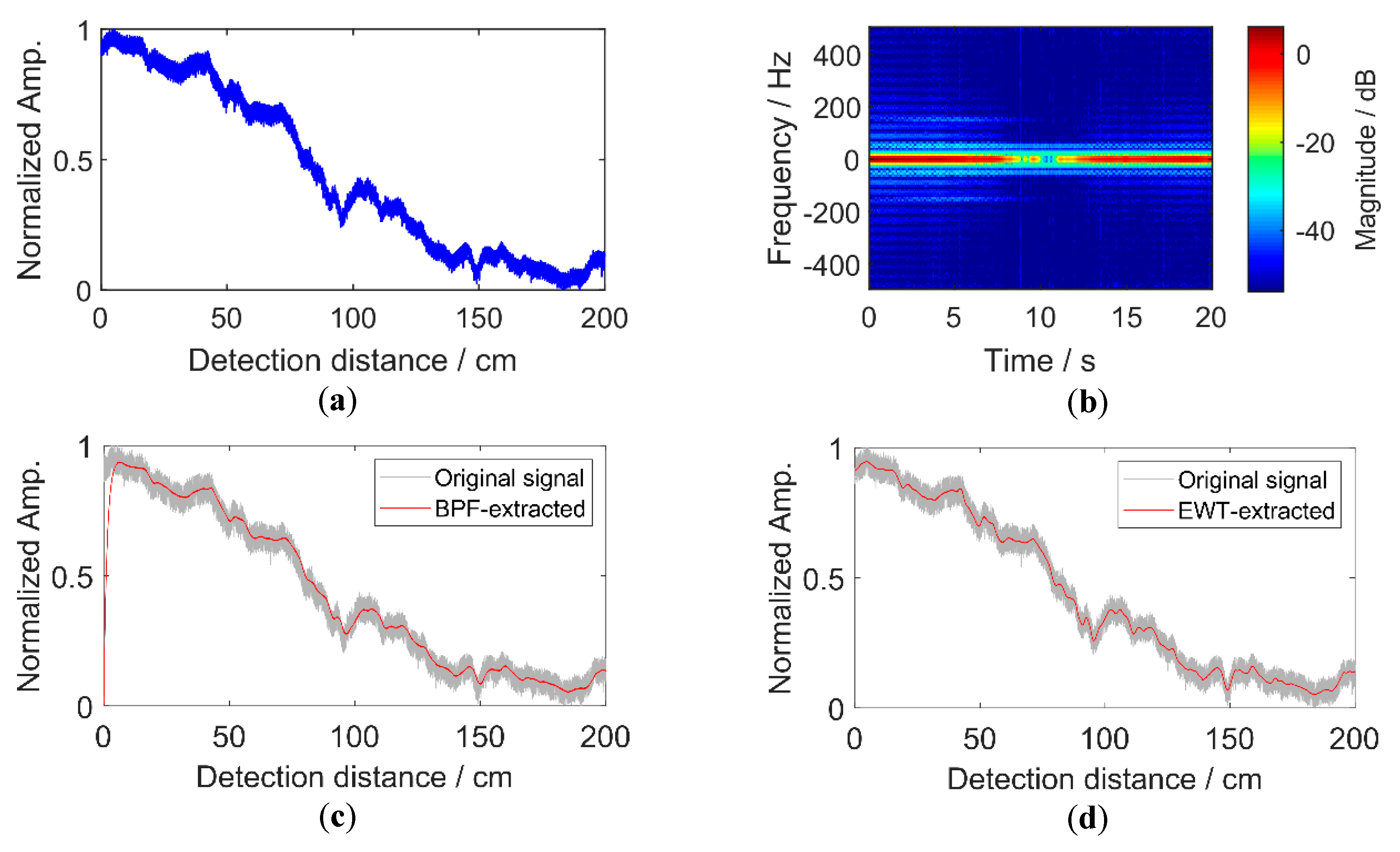
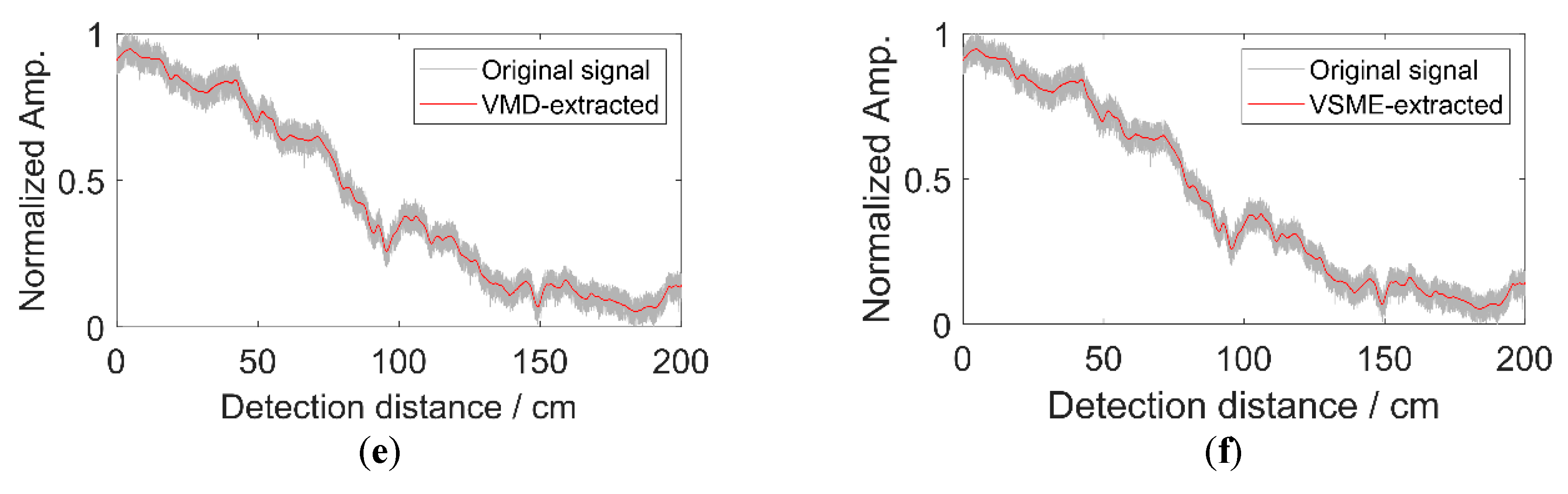
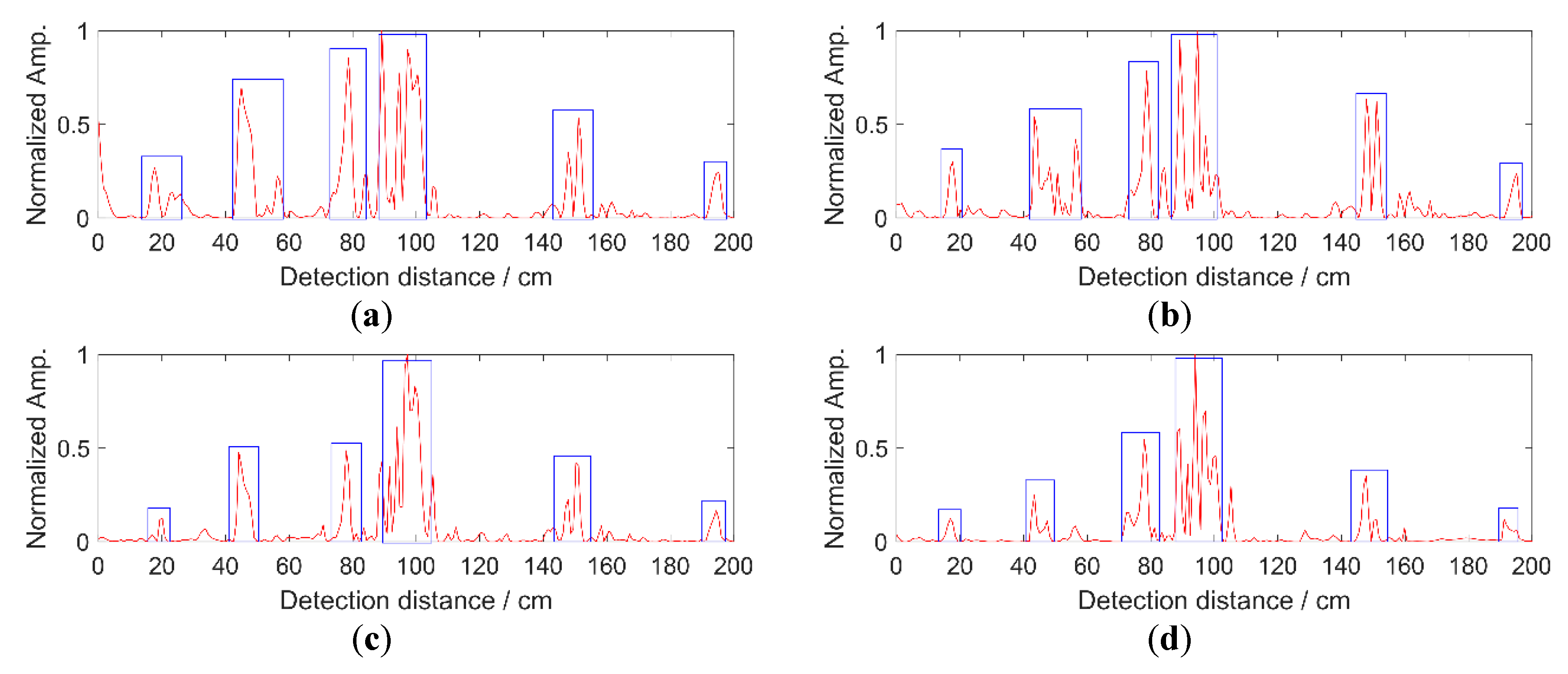
4.2.2. Results Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cataldo, A.; Cannazza, G.; De Benedetto, E.; Giaquinto, N. A new method for detecting leaks in underground water pipelines. IEEE Sens. J. 2011, 12, 1660–1667. [Google Scholar] [CrossRef]
- Vanaei, H.R.; Eslami, A.; Egbewande, A. A review on pipeline corrosion, in-line inspection (ILI), and corrosion growth rate models International. J. Press. Vessel. & Pip. 2017, 149, 43–54. [Google Scholar]
- Duisterwinkel, E.H.; Talnishnikh, E.; Krijnders, D.; Wörtche, H.J. Sensor motes for the exploration and monitoring of operational pipelines. IEEE Trans. Instrum. Meas. 2018, 67, 655–666. [Google Scholar] [CrossRef]
- Quarini, J.; Shire, S. A Review of Fluid-Driven Pipeline Pigs and their Applications. Proc. Inst. Mech. Eng.-Part E 2007, 221, 1–10. [Google Scholar] [CrossRef]
- Pham, H.Q.; Tran, B.V.; Doan, D.T.; Le, V.S.; Pham, Q.N.; Kim, K.; Kim, C.; Terki, F.; Tran, Q.H. Highly sensitive planar hall magnetoresistive sensor for magnetic flux leakage pipeline inspection. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Civera, M.; Fragonara, L.Z.; Surace, C. Video processing techniques for the contactless investigation of large oscillations. J. Phys. Conf. Ser. IOP Publ. 2019, 1249, 012004. [Google Scholar] [CrossRef]
- Civera, M.; Zanotti Fragonara, L.; Surace, C. An experimental study of the feasibility of phase-based video magnification for damage detection and localisation in operational deflection shapes. Strain 2020, 56, e12336. [Google Scholar] [CrossRef]
- Li, Y.; Yan, B.; Li, D.; Li, Y.; Zhou, D. Gradient-field pulsed eddy current probes for imaging of hidden corrosion in conductive structures. Sens. & Actuators A Phys. 2016, 238, 251–265. [Google Scholar]
- Jarvis, R.; Cawley, P.; Nagy, P.B. Current deflection NDE for the inspection and monitoring of pipes. NDT & E Int. 2016, 81, 46–59. [Google Scholar]
- Honarvar, F.; Salehi, F.; Safavi, V.; Mokhtari, A.; Sinclair, T. Ultrasonic monitoring of erosion/corrosion thinning rates in industrial piping systems. Ultrasonics 2013, 53, 1251–1258. [Google Scholar] [CrossRef]
- Hu, B.; Yu, R.; Liu, J. Experimental study on the corrosion testing of a buried metal pipeline by transient electromagnetic method. Anti-Corros. Methods Mater. 2016, 63, 262–268. [Google Scholar] [CrossRef]
- Haith, M.I.; Huthwaite, P.; Lowe, M.J. Defect characterisation from limited view pipeline radiography. NDT & E Int. 2017, 86, 186–198. [Google Scholar]
- Chongchong, L.; Lihong, D.; Haidou, W.; Guolu, L.; Binshi, X. Metal magnetic memory technique used to predict the fatigue crack propagation behavior of 0.45% C steel. J. Magn. Magn. Mater. 2016, 405, 150–157. [Google Scholar] [CrossRef]
- Aydin, U.; Rasilo, P.; Singh, D.; Lehikoinen, A.; Belahcen, A.; Arkkio, A. Coupled magneto-mechanical analysis of iron sheets under biaxial stress. IEEE Trans. Magn. 2015, 52, 1–4. [Google Scholar] [CrossRef]
- Dubov, A.; Kolokolnikov, S. The metal magnetic memory method application for online monitoring of damage development in steel pipes and welded joints specimens. Weld. World 2013, 57, 123–136. [Google Scholar] [CrossRef]
- Augustyniak, M.; Usarek, Z. Discussion of Derivability of Local Residual Stress Level from Magnetic Stray Field Measurement. J. Nondestruct. Eval. 2015, 34, 21. [Google Scholar] [CrossRef]
- Liu, Z.; Pang, H.; Pan, M.; Wan, C. Calibration and Compensation of Geomagnetic Vector Measurement System and Improvement of Magnetic Anomaly Detection. IEEE Geosci. & Remote Sens. Lett. 2016, 13, 447–451. [Google Scholar]
- Sheinker, A.; Moldwin, M.B. Magnetic anomaly detection (MAD) of ferromagnetic pipelines using principal component analysis (PCA). Meas. Sci. & Technol. 2016, 27, 45104. [Google Scholar]
- Buhari, M.D.; Tian, G.Y.; Tiwari, R. Microwave-Based SAR Technique for Pipeline Inspection Using Autofocus Range-Doppler Algorithm. IEEE Sens. J. 2018, 19, 1777–1787. [Google Scholar] [CrossRef]
- Fallahpour, M.; Case, J.T.; Ghasr, M.T.; Zoughi, R. Piecewise and Wiener filter-based SAR techniques for monostatic microwave imaging of layered structures. IEEE Trans. Antennas Propag. 2013, 62, 282–294. [Google Scholar] [CrossRef]
- Gilmore, C.; Jeffrey, I.; Lovetri, J. Derivation and comparison of SAR and frequency-wavenumber migration within a common inverse scalar wave problem formulation. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1454–1461. [Google Scholar] [CrossRef]
- Winters, D.W.; Van Veen, B.D.; Hagness, S.C. A sparsity regularization approach to the electromagnetic inverse scattering problem. IEEE Trans. Antennas Propag. 2009, 58, 145–154. [Google Scholar] [CrossRef] [PubMed]
- De Zaeytijd, J.; Franchois, A.; Eyraud, C.; Jean-Michel, G. Full-wave three-dimensional microwave imaging with a regularized Gauss-Newton method-Theory and experiment. IEEE Trans. Antennas Propag. 2007, 55, 3279–3292. [Google Scholar] [CrossRef]
- De Zaeytijd, J.; Franchois, A.; Geffrin, J. A new value picking regularization strategy—Application to the 3-D electromagnetic inverse scattering problem. IEEE Trans. Antennas Propag. 2009, 57, 1133–1149. [Google Scholar] [CrossRef]
- Sheinker, A.; Ginzburg, B.; Salomonski, N.; Dickstein, P.A.; Frumkis, L.; Kaplan, B. Magnetic Anomaly Detection Using High-Order Crossing Method. IEEE Trans. Geosci. & Remote Sens. 2012, 50, 1095–1103. [Google Scholar]
- Sheinker, A.; Salomonski, N.; Ginzburg, B.; Frumkis, L.; Kaplan, B. Magnetic anomaly detection using entropy filter. Meas. Sci. & Technol. 2008, 19, 45205. [Google Scholar]
- Zhou, H.; Pan, Z.; Zhang, Z. Magnetic Anomaly Detection with Empirical Mode Decomposition Trend Filtering. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2017, 2503–2506. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. Math. Phys. & Eng. Sci. 1998, 454, 903–995. [Google Scholar]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Yeh, J.R.; Shieh, J.S.; Huang, N.E. Complementary Ensemble Empirical Mode Decomposition: A Novel Noise Enhanced Data Analysis Method. Adv. Adapt. Data Anal. 2010, 2, 135–156. [Google Scholar] [CrossRef]
- Gilles, J. Empirical Wavelet Transform. IEEE Trans. Signal Proc. 2013, 61, 3999–4010. [Google Scholar] [CrossRef]
- Chen, S.; Dong, X.; Peng, Z.; Zhang, W.; Meng, G. Nonlinear Chirp Mode Decomposition: A Variational Method. IEEE Trans. Signal Process. 2017, 65, 6024–6037. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Ma, W.; Yin, S.; Jiang, C.; Zhang, Y. Variational mode decomposition denoising combined with the Hausdorff distance. Rev. Sci. Instrum. 2017, 88, 35109. [Google Scholar] [CrossRef] [PubMed]
- Nazari, M.; Sakhaei, S.M. Variational Mode Extraction: A New Efficient Method to Derive Respiratory Signals from ECG. IEEE J. Biomed. Health Inf. 2018, 22, 1059–1067. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Chen, X.; Cai, G.; Chen, B.; Li, X.; He, Z. Matching Demodulation Transform and SynchroSqueezing in Time-Frequency Analysis. IEEE Trans. Signal Process. 2014, 62, 69–84. [Google Scholar] [CrossRef]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed Optimization and Statistical Learning via the Alternating Direction Method of Multipliers. Found. & Trends® Mach. Learn. 2010, 3, 1–122. [Google Scholar]
- Tejero, C.E.J.; Sallares, V.; Ranero, C.R. Appraisal of instantaneous phase-based functions in adjoint waveform inversion. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5185–5197. [Google Scholar] [CrossRef]
- Mcneill, S.I. Decomposing a signal into short-time narrow-banded modes. J. Sound Vib. 2016, 373, 325–339. [Google Scholar] [CrossRef]
- Pustelnik, N.; Borgnat, P.; Flandrin, P. Empirical mode decomposition revisited by multicomponent non-smooth convex optimization. Signal Process. 2014, 102, 313–331. [Google Scholar] [CrossRef]
- Goldstein, T.; O’Donoghue, B.; Setzer, S. Fast alternating direction optimization methods. SIAM J. Imaging Sci. 2014, 7, 1588–1623. [Google Scholar] [CrossRef]
- Chen, S.; Dong, X.; Xing, G.; Peng, Z.K.; Zhang, W.; Meng, G. Separation of overlapped non-stationary signals by ridge path regrouping and intrinsic chirp component decomposition. IEEE Sens. J. 2017, 17, 5994–6005. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Contents | EMD | EWT | VMD | VSME |
|---|---|---|---|---|
| Basis | Self-adaption | Prior determination | Prior determination | Self-adaption |
| Frequency | Difference: Local | Convolution: Local | Difference: Global | Convolution: Global |
| Characterization | Energy-Time | Energy-Time-Frequency | Energy-Time-Frequency | Energy-Time-Frequency |
| Nonlinear | Yes | Yes | Yes | Yes |
| Nonstationarity | Yes | No | No | Yes |
| Feature Extraction | Yes | Discrete: No Continuous: Yes | Yes | Yes |
| Theoretical Basis | Empirical | Complete theory | Complete theory | Complete theory |
| Algorithms | SNR/dB | RMSE | NCCC | |||
|---|---|---|---|---|---|---|
| M | SD | M | SD | M | SD | |
| BPF | 2.23 | 0.20 | 0.15 | 0.10 | 0.81 | 0.46 |
| EWT | 2.61 | 0.12 | 0.18 | 0.06 | 0.89 | 0.26 |
| VMD | 3.08 | 0.89 | 0.11 | 0.68 | 0.94 | 0.16 |
| VSME | 3.26 | 0.05 | 0.13 | 0.02 | 0.95 | 0.04 |
| Algorithm | BPF | EMD | VMD | VSME |
|---|---|---|---|---|
| Mean/s | 5.69 | 146.82 | 108.36 | 10.63 |
| SD | 0.04 | 16.78 | 8.29 | 1.08 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ju, H.; Wang, X.; Zhao, Y. Variational Specific Mode Extraction: A Novel Method for Defect Signal Detection of Ferromagnetic Pipeline. Algorithms 2020, 13, 105. https://doi.org/10.3390/a13040105
Ju H, Wang X, Zhao Y. Variational Specific Mode Extraction: A Novel Method for Defect Signal Detection of Ferromagnetic Pipeline. Algorithms. 2020; 13(4):105. https://doi.org/10.3390/a13040105
Chicago/Turabian StyleJu, Haiyang, Xinhua Wang, and Yizhen Zhao. 2020. "Variational Specific Mode Extraction: A Novel Method for Defect Signal Detection of Ferromagnetic Pipeline" Algorithms 13, no. 4: 105. https://doi.org/10.3390/a13040105
APA StyleJu, H., Wang, X., & Zhao, Y. (2020). Variational Specific Mode Extraction: A Novel Method for Defect Signal Detection of Ferromagnetic Pipeline. Algorithms, 13(4), 105. https://doi.org/10.3390/a13040105