2.1. Mathematical Modeling of Double Cylinder Forging Hydraulic Press System
It is necessary to model and simulate the double-cylinder forging hydraulic press. By studying the position servo system of double-cylinder forging hydraulic press [
15], the relevant components in the whole system were mathematically modeled, and the mathematical model was used to simulate and model the system [
16]. The dynamic characteristics of the servo system of the double-cylinder forging hydraulic press were analyzed.
According to the principle of the synchronous control system, the two hydraulic cylinders in the double-cylinder forging hydraulic press servo system are symmetrical, and the parameters are the same. Then one of the hydraulic cylinders is mathematically modeled [
17,
18,
19]. The transfer function of the hydraulic cylinder can be composed of the flow equation of the proportional valve, the flow continuity equation of the hydraulic cylinder control chamber, and the hydraulic balance equation of the hydraulic cylinder and the load [
20].
Electro-hydraulic proportional valves are generally overlapped slide valves. To facilitate the establishment and analysis of models, set:
(1) The valve is an ideal zero opening four-way spool valve and the four orifices are symmetrically distributed.
(2) The throttle orifice is turbulent, ignoring the compressibility of the liquid and its effect on the flow of the valve outlet.
(3) The valve has an ideal response capability, that is, when the spool displacement or pressure difference across the valve changes, the outlet flow rate of the valve can instantly change.
(4) The supply pressure is kept constant and the return pressure is zero.
The valve’s flow Equation can be simplified to:
n the above equation, represents the pressure of the cylinder control chamber in the double-cylinder forging hydraulic press servo system, represents the valve flow gain, represents the valve flow pressure coefficient, and represents the valve flow rate.
Set all the hydraulic connection pipes of the hydraulic cylinder in the servo system to be short and thick, ignoring the pressure loss in all the pipes, ignoring the influence of the quality of the hydraulic oil, the friction in the flowing and other factors. The pressure in the working chamber of the hydraulic cylinder is completely equal, while the temperature and effective volumetric elastic modulus of the hydraulic oil are considered to be constant. Leakage inside and outside the cylinder is laminar flow. The flow continuity Equation for the hydraulic cylinder control chamber is thus constructed as:
In the above equation,
represents the cylinder height;
and
represent the inflow rate and outflow rate of the flow in the control chamber of the hydraulic cylinder,
represents the piston displacement coefficient in the control chamber of the hydraulic cylinder;
represents the flow continuity coefficient;
represents the hydraulic pressure The piston area of the cylinder control chamber;
represents the internal leakage coefficient of the hydraulic valve;
represents the volume of the control chamber of the hydraulic cylinder, and
,
represents the maximum stroke of the piston cylinder.
In the above equation,
represents the initial volume of the cylinder control chamber. When the piston displacement is small,
,
. Combining Equation (2) with Equation (3), then:
The incremental Lagrangian transformation is:
The hydraulic balance Equation of the hydraulic cylinder in the double-cylinder forging hydraulic press servo system is:
In the equation,
is the effective area of the rod cavity of the hydraulic cylinder;
is the damping coefficient of the hydraulic system;
is the total mass of the hydraulic cylinder;
is the spring stiffness of the load;
is the external force acting on the piston. According to the above equation, the incremental transformation equation with its increment is:
In the above equation,
represents the total output displacement of the piston. By cancelling the intermediate variables
,
, and
by Equations (1), (5) and (7), the total output displacement of the piston when
and
act simultaneously is:
In the above Equation, is the total pressure flow coefficient, .
The displacement
of the plunger and its beam assembly can be obtained from the upper type, and the transfer function of the spool displacement
is:
In practice, the system’s leakage is small, that is,
. When a valve-controlled cylinder is used as a position-controlled power output element, the hydraulic system often does not have an elastic load, that is,
. The above equation can be simplified as:
In the above equation, represents the hydraulic natural frequency and represents the hydraulic damping ratio.
In order to facilitate modeling, the electro-hydraulic proportional valve is simplified to a proportional one. Its transfer function is approximately:
In the above Equation, represents the flow rate gain of the proportional valve, represents the output flow rate of the proportional valve, and represents the input voltage of the proportional valve.
In the control system, since the response frequency of the displacement sensor is much larger than the response frequency of the system, the displacement sensor is often regarded as a proportional link, and its transfer function is:
According to the double-cylinder forging hydraulic and electrohydraulic servo system structure, the flow gain and the natural frequency of the hydraulic system are calculated when no load is obtained, and the transfer function of the displacement
of the cross member is determined to be
:
According to the above discussion, the mathematical model of the double-cylinder forging hydraulic press system constructed can be expressed as:
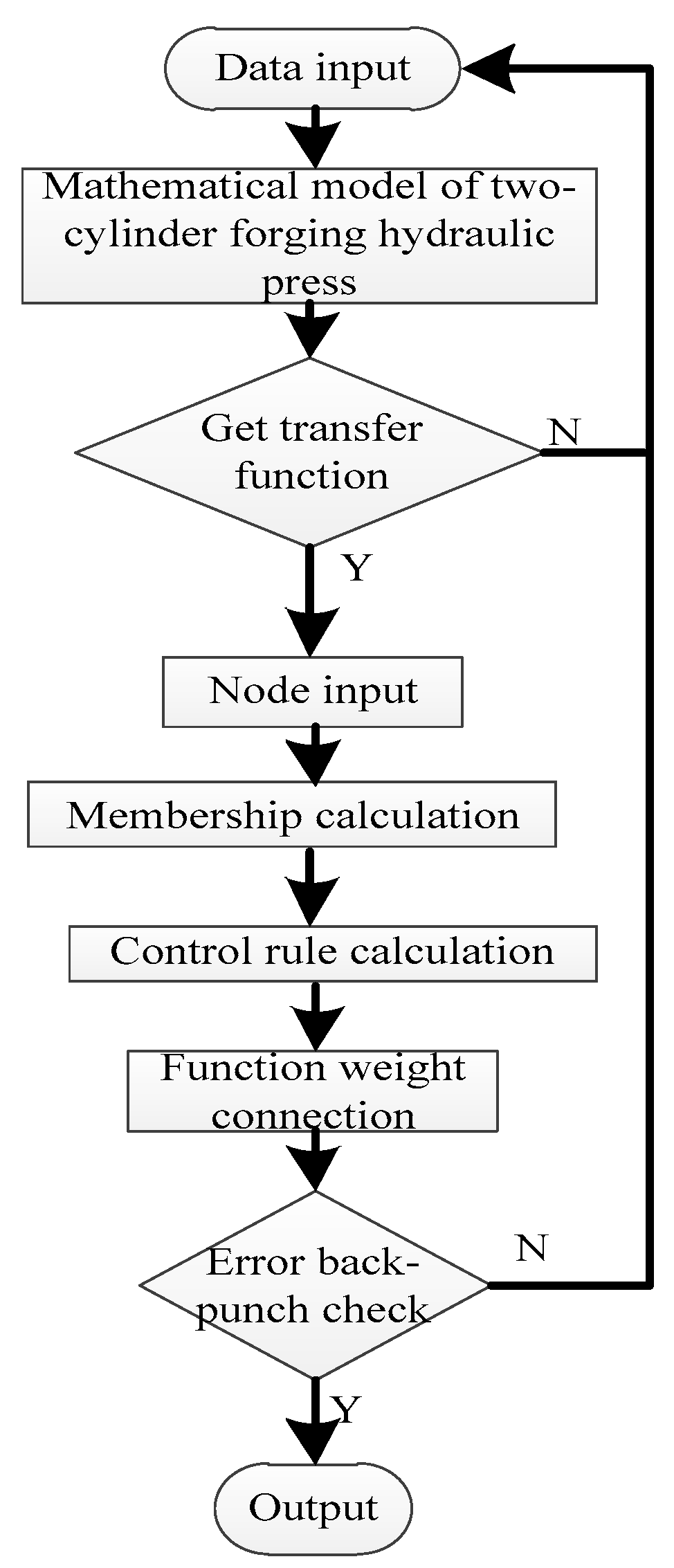
Through the above discussion, according to the mathematical model of the double-cylinder forging hydraulic press system, the operation flow of the double-cylinder forging hydraulic press is analyzed to improve the synchronous control precision of the double-cylinder forging hydraulic press.
2.2. Synchronization Control Algorithm of Double-Cylinder Forging Hydraulic Press Based on Fuzzy Neural Network
Both fuzzy control and neural network control belong to a numerical and non-mathematical model control method. In the fuzzy neural network, input and output nodes of the neural network are used to represent input and output signals of the fuzzy system. Implicit nodes of the neural network are used to represent membership functions and fuzzy rules. The parallel processing capability of the neural network is used to make the fuzzy system. The reasoning ability is greatly improved, and the synchronous control of the double cylinder forging hydraulic press is realized.
The conventional fuzzy neural network achieves a four-layer network structure for the change control of the position servo system of a double-cylinder forging hydraulic press. The first level is the input node, which contains two position change servo neurons for double-cylinder forging hydraulic presses; the second level is the fuzzy subset of the corresponding input variables; the third level is fuzzy control reasoning, in which the changing neuron of each position servo system of each double cylinder forging hydraulic press contains a fuzzy control rule; the fourth layer is the output layer, which serves as the control output for synthesizing each neuron. It can be seen that the first layer and the second layer reflect the premise of the fuzzy control rules, the third layer corresponds to the fuzzy reasoning, and the fourth layer realizes the synchronous control. In order to realize the synchronous control of the double-cylinder forging hydraulic press, the fuzzy controller uses the single element model gelatinization and Gaussian membership functions.
Suppose represents the -th input of -th layer in a conventional fuzzy neural network, represents the net input of the -th node of -th layer in the constructed conventional fuzzy neural network, and represents the -th in the conventional fuzzy neural network constructed The output of the layer j node, that is, .
In the above equation, , . represents the number of change data of the position servo system, and the variable data neuron of the position servo system directly transfers the input to the next layer.
In the above equation, represents the center of the membership function of the system change data, and represents the width of the membership function.
In the above equation, represents the activation degree of the -th control rule of the position servo system of the double-cylinder forging hydraulic press. In the third layer, the position servo system of each double-cylinder forging hydraulic press changes data control rules to represent a fuzzy rule.
In the above equation, is the connection weight.
According to the conventional fuzzy neural network to realize the synchronous control structure of the double cylinder forging hydraulic press, the main parameters to be learned are the central value of the membership function in the second layer and the width of the membership function, and the connection weight of the fourth layer. The selection criterion of the membership function is within the closed interval given by the function, for example (0, 1), we call it “single factor membership degree”, and the membership degree is within the closed interval given by the function. The weighting calculation is performed to obtain the fuzzy membership degree, and the closer the value of the evaluation index of the membership degree is to 0, the closer it is to 1. The learning algorithm of the above three parameters can be designed based on the error back propagation algorithm of the BP neural network.
Define the indicator learning function. Assume that
is the expected output and
is the actual output, then:
Use error back-propagation to calculate , , and , and use a ladder-degree optimization algorithm to adjust the parameters , , and .
Unfuzzy layer (the fourth layer):
Rule layer (the third layer):
Membership layer (the second layer):
The correction value of the input membership function parameter is:
From the above, it can be seen that the parameters of the conventional fuzzy neural network for synchronous control of a double-cylinder forging hydraulic press can be expressed as:
According to the calculated parameters, a synchronous control model of a double-cylinder forging hydraulic press based on the conventional fuzzy neural network is constructed. However, this model cannot accurately describe the change of the position servo system of the double-cylinder forging hydraulic press, and the nature of the compensation operation needs to be introduced to optimize the conventional fuzzy neural network. The precise control of the position servo system of a double-cylinder forging hydraulic press is controlled by a compensation operation based on negative calculations and positive calculations. Negative fuzzy neurons can map inputs to the worst case, and positive fuzzy neurons can map to the best output. The compensation fuzzy neuron can map the worst input and the best input to the compensation output, and establish a relative compromise between the worst case input and the best input case.
After the optimization, the first layer of the conventional fuzzy neural network is the input layer. Each neuron node is directly connected to each input component, and the function is to transfer the input directly. Where
represents the input signal and
represents the output signal:
The second layer is the fuzzification layer. Each neuron node represents a fuzzy linguistic variable. The role is to calculate the membership degree of each fuzzy component of the input vector that belongs to each language variable value. Where
represents a fuzzy set of the input signal
;
represents the probability of the input of the
-th rule by the input
;
represents the center of the membership function, and
represents the width of the membership function. Then:
The third layer is the regular layer, each neuron node represents a fuzzy rule, and the compensation layer of the fuzzy neural network allocates two neurons for a rule. One is a negative operation neuron, which maps the input signal to the worst, the other is the active neuron, which maps the input signal to the best output. Then:
The fourth layer is the compensation operation layer. The role is to map the worst and best operations mapped in the regular layer to an output, and to make a relative compromise between the best input and the worst input. Among them,
is the compensation degree:
The fifth layer is the anti-fuzzy layer, which acts as an anti-fuzzy calculation for the neuron nodes and obtains the output of the network. The membership function that defines the output is:
According to the center of gravity anti-fuzzification method to improve, use
and
to represent the center and width of the output membership function. The anti-fuzzy function is defined as:
The structure of the neural network fundamentally determines its performance and the speed of learning and training. The compensated fuzzy neural network is essentially a multi-layer feedforward network. Like the conventional fuzzy neural network, the compensated fuzzy neural network can be designed and adjusted according to the error back propagation method of the BP network. In the following, the center and width of the input and output membership functions and the compensation learning algorithm are derived based on the gradient descent method.
Assume that
is the desired output and
is the actual output. The definition indicator function is:
The training of
of the output membership function center is:
The training of
of the output membership function width is:
The training of the input membership function center
:
The training of the input membership function width
:
Through the above discussion, the fuzzy neural network model is constructed by using the calculated center and width of the input and output membership functions. Through the network model, the synchronous control of the double-cylinder forging hydraulic press is realized.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}