Steady-State Performance of an Adaptive Combined MISO Filter Using the Multichannel Affine Projection Algorithm





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
Notation
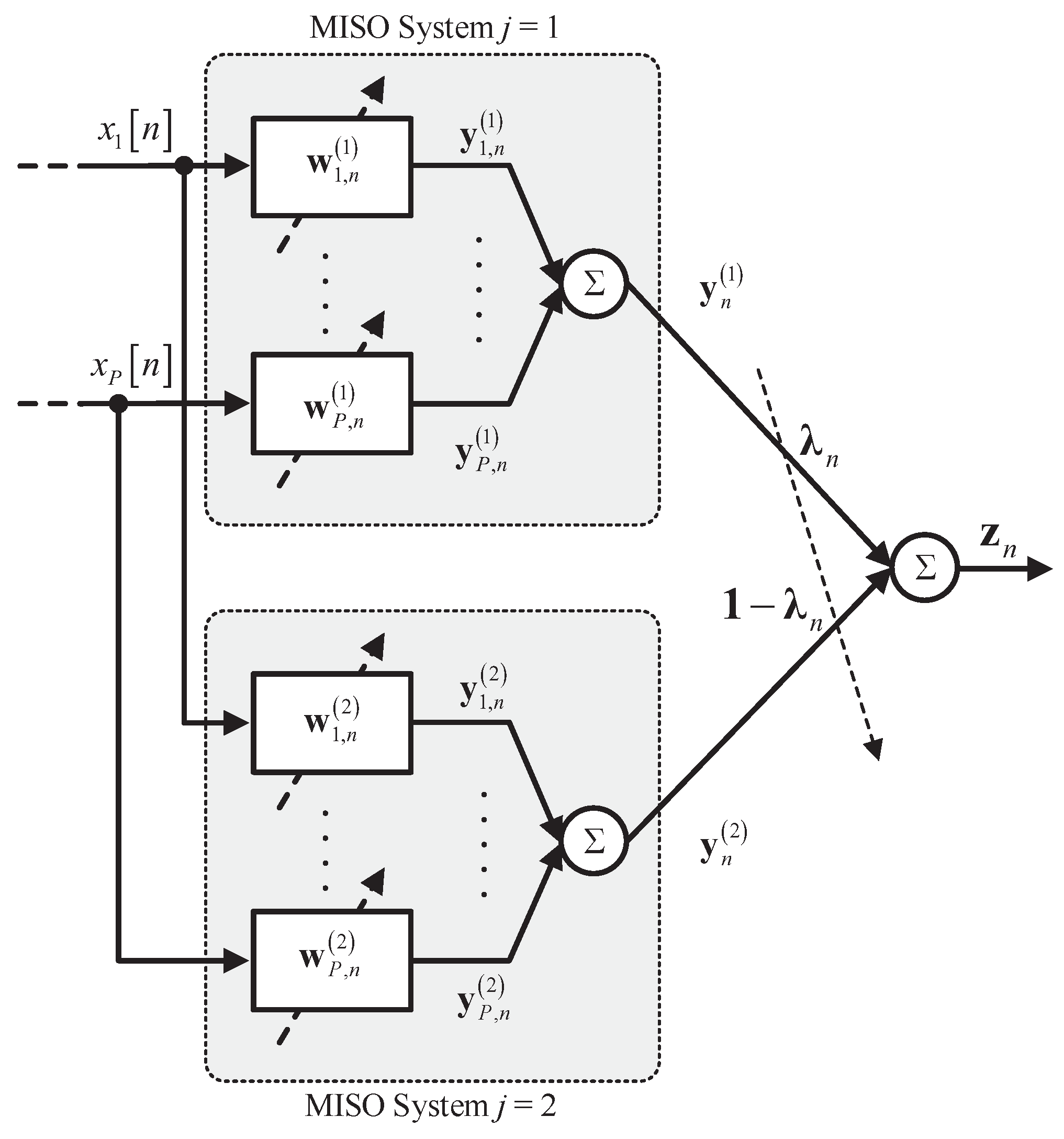
2. A Convex Combination Scheme for Adaptive MISO Filters
- to improve the overall tracking abilities beyond the capabilities of the individual filters by selecting and . Since the APA with unitary projection order is equivalent to the (normalized) least mean squares algorithm, this choice enables the scheme to show a combination between a gradient-based and a Hessian-based adaptive algorithm, which provides diversity to the scheme and leads to enhancing the tracking performance [1,16].
3. Optimum Mixing Parameters and EMSE
3.1. Stationary Data Model
3.2. Formulation of the EMSE for the Combination
- Case 1:
- .For this case, it is easy to verify that and . In this situation, the optimum mixing parameter is , and the combined scheme turns out to perform like the best individual filter, i.e., the one with the lower EMSE, which is the first filter. Indeed, if we replace in (24), we achieve:
- Case 2:
- .Here, we have that and . Again, the combined filter turns out to perform like the best individual filter, which in this case is the second one. As a matter of fact, the optimum mixing parameter is ; thus, the optimum EMSE is:
- Case 3:
- , .In this case, considering (24), it is easy to conclude that the cross-EMSE is lower than both individual EMSEs; therefore, , , while . This result can be justified by the fact that since the correlation between the a priori errors of both individual components is small, their weighted combination provides an estimation error of reduced variance [1]. In this case, the optimum EMSE is still represented by (24).
- Case 4:
- .For completeness, we consider also this particular case, whose condition is rather rare to find in practice. In this case, we have , ; thus, the optimum EMSE is:
4. Mean Squared Performance of Individual MISO APA Filters
4.1. Energy Conservation Relation for MISO Filters
4.2. Variance Relation for MISO Filters
4.3. Steady-State Performance for MISO Filters
- (i)
- Small value of .If we assume a small value of the step size , we have for Assumption 4 that ; hence, (45) becomes:
- (ii)
- Large value of .If we assume a large value of the step size (i.e., close to one), we have for Assumption 4 that ; hence, (45) becomes:where is the element on the first row and first column of . However, we can also assume the following approximations:that yield the following expression for the steady-state EMSE of the MISO filter:which depends proportionally on the value of the projection order .
5. Mean Squared Performance of the Combination of MISO Filters
- If we characterize the combination scheme according to the step-size values, generally small and large, e.g., to find an optimal selection of filter parameters, we have that:where is defined similarly to (39).
- On the other hand, if we want to provide diversity to the combined scheme and choose different projection orders, but the same step-size value, i.e., , we have that:Equation (57) holds as long as the SNR is high, as detailed in Appendix B.
- (i)
- Small values for both .This case is typical when we want to differentiate the combined scheme according to the projection order and we choose the same small value for both step sizes . Based on Assumption 5, we have that ; hence, (59) becomes:
- (ii)
- Large value for at least one .We can also consider the case for which , according to Assumption 5. This may occur when we want to characterize the combined scheme according to the projection order and we choose the same large value for both step sizes , or also when we choose the same projection order, but one step-size value small and the other one large (close to one). In both of these situations, after some approximations similarly to (50), we have that (59) becomes:which depends proportionally on the value of the maximum projection order between the two MISO filters.
6. Simulation Results
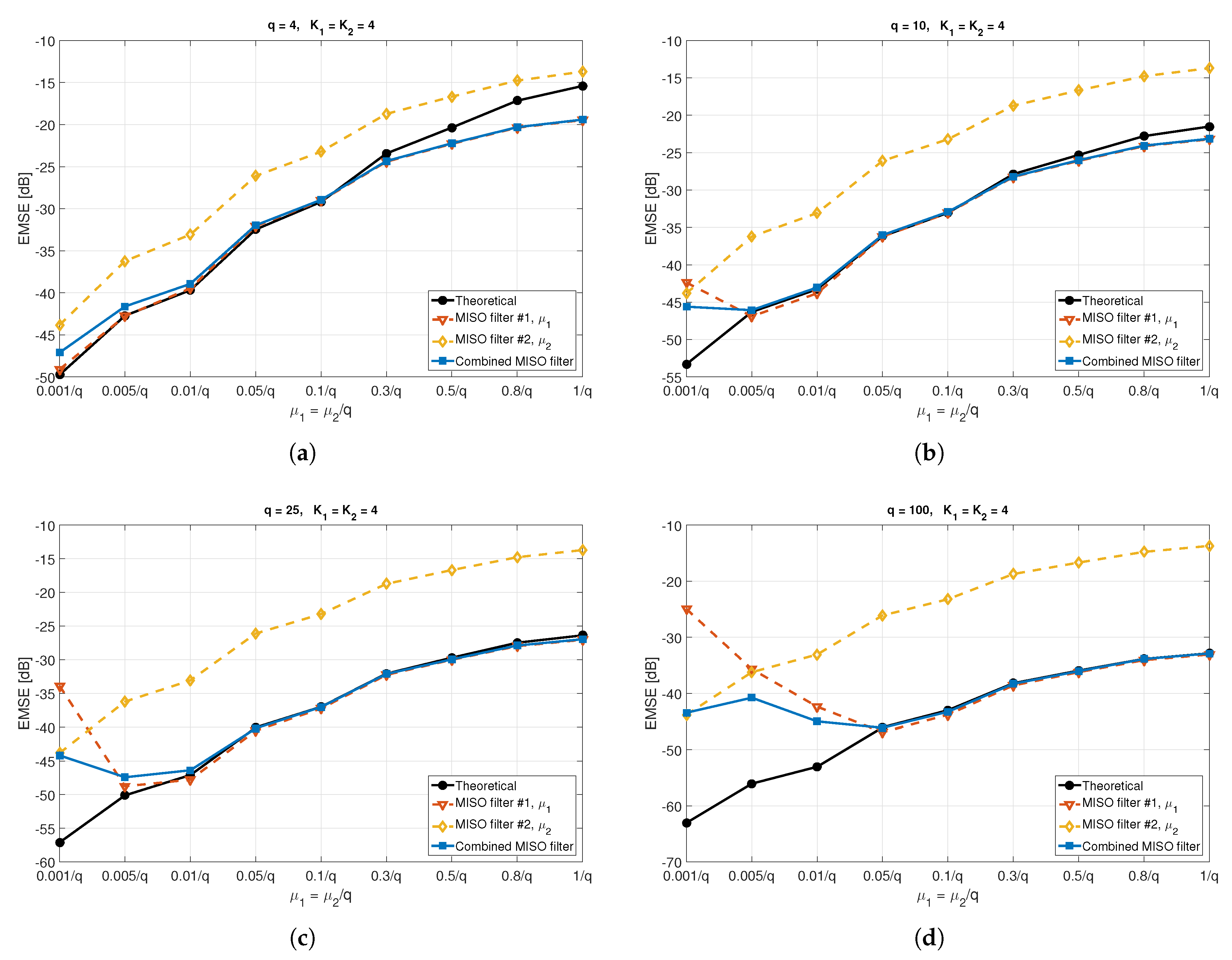
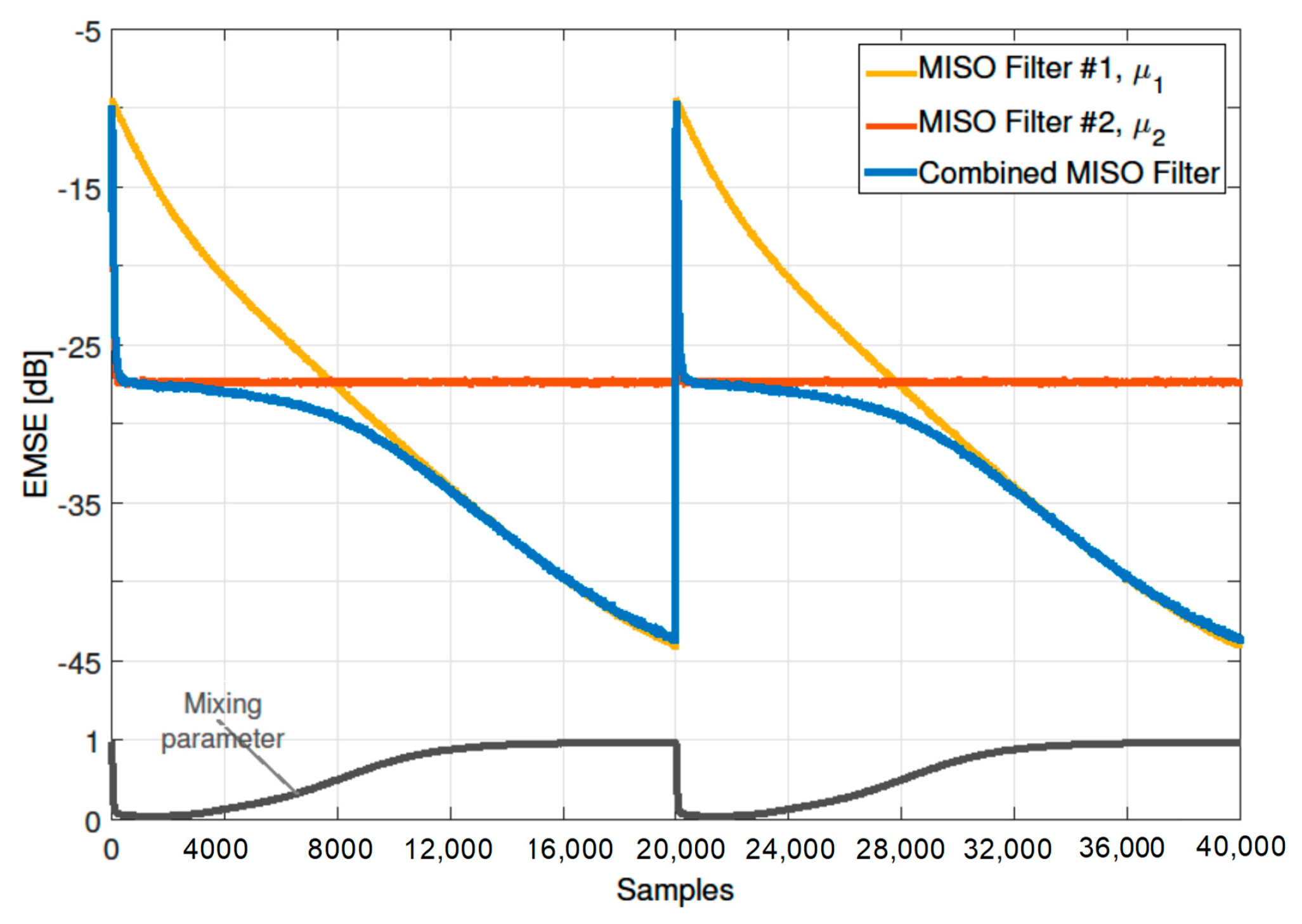
6.1. Performance Evaluation Using Different Step-Size Values
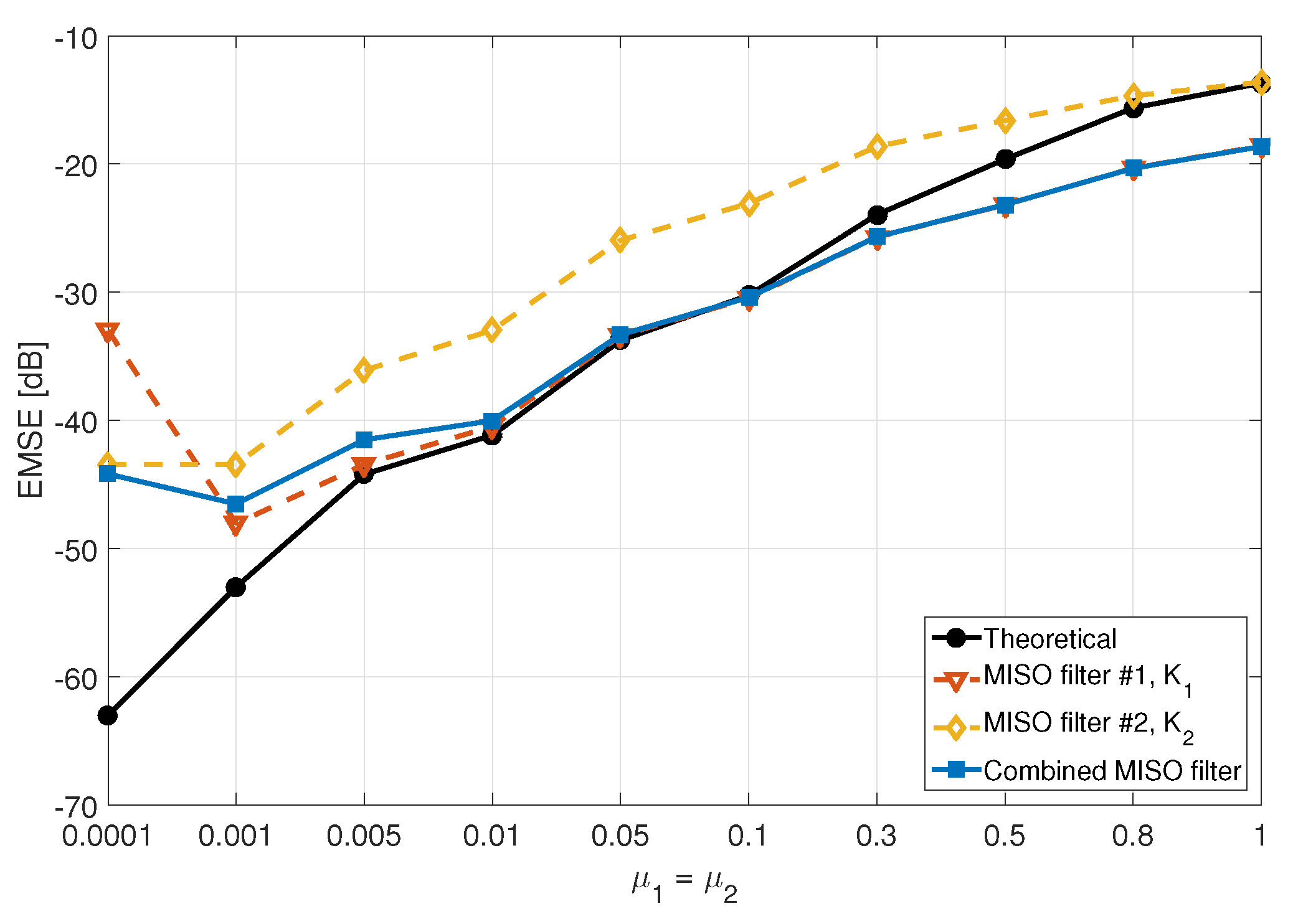
6.2. Performance Evaluation Using Different Projection Orders
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Steady-State Approximation for the EMSE of Individual MISO Filters with Multiple Projections
Appendix B. Steady-State Approximation for the Cross-EMSE Involving Multiple Projections
References
- Arenas-García, J.; Azpicueta-Ruiz, L.A.; Silva, M.T.M.; Nascimento, V.H.; Sayed, A.H. Combinations of Adaptive Filters: Performance and Convergence Properties. IEEE Signal Process. Mag. 2016, 1, 120–140. [Google Scholar] [CrossRef]
- Singer, A.C.; Feder, M. Universal Linear Prediction by Model Order Weighting. IEEE Trans. Signal Process. 1999, 47, 2685–2699. [Google Scholar] [CrossRef]
- Kozat, S.S.; Singer, A.C. Multi-Stage Adaptive Signal Processing Algorithms. In Proceedings of the IEEE Sensor Array Multichannel Signal Workshop (SAM), Cambridge, MA, USA, 17 March 2000; pp. 380–384. [Google Scholar]
- Yousef, N.R.; Sayed, A.H. A Unified Approach to the Steady-State and Tracking Analyzes of Adaptive Filters. IEEE Trans. Signal Process. 2001, 49, 314–324. [Google Scholar] [CrossRef]
- Arenas-García, J.; Martínez-Ramón, M.; Navia-Vázquez, A.; Figueiras-Vidal, A.R. Plant Identification via Adaptive Combination of Transversal Filters. Signal Process. 2006, 86, 2430–2438. [Google Scholar] [CrossRef]
- Arenas-García, J.; Figueiras-Vidal, A.R.; Sayed, A.H. Mean-Square Performance of a Convex Combination of Two Adaptive Filters. IEEE Trans. Signal Process. 2006, 54, 1078–1090. [Google Scholar] [CrossRef]
- Arenas-García, J.; Figueiras-Vidal, A.R. Adaptive Combination of Proportionate Filters for Sparse Echo Cancellation. IEEE Trans. Audio Speech Lang. Process. 2009, 17, 1087–1098. [Google Scholar] [CrossRef]
- Comminiello, D.; Scarpiniti, M.; Parisi, R.; Uncini, A. Combined Adaptive Beamforming Schemes for Nonstationary Interfering Noise Reduction. Signal Process. 2013, 93, 3306–3318. [Google Scholar] [CrossRef]
- Azpicueta-Ruiz, L.A.; Zeller, M.; Figueiras-Vidal, A.R.; Arenas-García, J.; Kellermann, W. Adaptive Combination of Volterra Kernels and its Application to Nonlinear Acoustic Echo Cancellation. IEEE Trans. Audio Speech Lang. Process. 2011, 19, 97–110. [Google Scholar] [CrossRef]
- Comminiello, D.; Scarpiniti, M.; Azpicueta-Ruiz, L.A.; Arenas-García, J.; Uncini, A. Functional Link Adaptive Filters for Nonlinear Acoustic Echo Cancellation. IEEE Trans. Audio Speech Lang. Process. 2013, 21, 1502–1512. [Google Scholar] [CrossRef]
- Comminiello, D.; Scardapane, S.; Scarpiniti, M.; Parisi, R.; Uncini, A. Convex Combination of MIMO Filters for Multichannel Acoustic Echo Cancellation. In Proceedings of the IEEE International Symposium on Image and Signal Processing (ISPA), Trieste, Italy, 4–6 September 2013; pp. 771–775. [Google Scholar]
- Silva, M.T.M.; Arenas-García, J. A Soft-Switching Blind Equalization Scheme via Convex Combination of Adaptive Filters. IEEE Trans. Signal Process. 2013, 61, 1171–1182. [Google Scholar] [CrossRef]
- Comminiello, D.; Scarpiniti, M.; Azpicueta-Ruiz, L.A.; Arenas-García, J.; Uncini, A. A Block-Based Combined Scheme Exploiting Sparsity in Nonlinear Acoustic Echo Cancellation. In Proceedings of the IEEE 26th International Workshop on Machine Learning for Signal Processing (MLSP), Salerno, Italy, 13–16 September 2016; pp. 1–6. [Google Scholar]
- Comminiello, D.; Scarpiniti, M.; Azpicueta-Ruiz, L.A.; Arenas-García, J.; Uncini, A. Combined Nonlinear Filtering Architectures Involving Sparse Functional Link Adaptive Filters. Signal Process. 2017, 135, 168–178. [Google Scholar] [CrossRef]
- Comminiello, D.; Scarpiniti, M.; Scardapane, S.; Azpicueta-Ruiz, L.A.; Uncini, A. Combined Sparse Regularization for Nonlinear Adaptive Filters. In Proceedings of the 26th European Signal Processing Conference (EUSIPCO), Rome, Italy, 3–7 September 2018; pp. 341–345. [Google Scholar]
- Silva, M.T.M.; Nascimento, V.H. Improving the Tracking Capability of Adaptive Filters Via Convex Combination. IEEE Trans. Signal Process. 2008, 56, 3137–3149. [Google Scholar] [CrossRef]
- Bershad, N.J.; Bermudez, J.C.M.; Tourneret, J.Y. An Affine Combination of two LMS Adaptive Filters— Transient Mean-Square Analysis. IEEE Trans. Signal Process. 2008, 56, 1853–1864. [Google Scholar] [CrossRef]
- Candido, R.; Silva, M.T.M.; Nascimento, V.H. Transient and Steady-State Analysis of the Affine Combination of Two Adaptive Filters. IEEE Trans. Signal Process. 2010, 58, 4064–4078. [Google Scholar] [CrossRef]
- Kozat, S.S.; Erdogan, A.T.; Singer, A.C.; Sayed, A.H. Steady-State MSE Perfromance Analysis of Mixture Approaches to Adaptive Filtering. IEEE Trans. Signal Process. 2010, 58, 4050–4063. [Google Scholar] [CrossRef]
- Donmez, M.A.; Kozat, S.S. Steady State and Transient MSE Analysis of Convexly Constrained Mixture Methods. IEEE Trans. Signal Process. 2012, 60, 3314–3321. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P. (Eds.) Robust Adaptive Beamforming; Wiley: Hoboken, NJ, USA, 2005. [Google Scholar]
- Uncini, A. Fundamentals of Adaptive Signal Processing; Springer: Cham, Switzerland, 2015; ISBN 978-3-319-02806-4. [Google Scholar]
- Hong, E.; Har, D. Peak-to-Average Power Ratio Reduction for MISO OFDM Systems with Adaptive All-Pass Filters. IEEE Trans. Wirel. Commun. 2011, 10, 3163–3167. [Google Scholar] [CrossRef]
- Slock, D.T.M. Spatio-Temporal Training-Sequence Based Channel Equalization and Adaptive Interference Cancellation. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Atlanta, GA, USA, 7–10 May 1996; pp. 2714–2717. [Google Scholar]
- Gay, S.L.; Benesty, J. (Eds.) Acoustic Signal Processing for Telecommunications; Kluwer Academic Publishers: Boston, MA, USA; Dordrecht, The Netherlands; London, UK, 2000. [Google Scholar]
- Thüne, P.; Enzner, G. Trends in Adaptive MISO System Identification for Multichannel Audio Reproduction and Speech Communication. In Proceedings of the 8th International Symposium on Image and Signal Processing and Analysis (ISPA), Trieste, Italy, 4–6 September 2013; pp. 767–772. [Google Scholar]
- Ozeki, K.; Umeda, T. An Adaptive Filtering Algorithm Using an Orthogonal Projection to an Affine Subspace and its Properties. Electron. Commun. Jpn. (Part I Commun.) 1984, 67, 19–27. [Google Scholar] [CrossRef]
- Benesty, J.; Duhamel, P.; Grenier, Y. A Multichannel Affine Projection Algorithm with Applications to Multichannel Acoustic Echo Cancellation. IEEE Signal Process. Lett. 1996, 3, 35–37. [Google Scholar] [CrossRef]
- Albu, F.; Paleologu, C.; Benesty, J. A Variable Step Size Evolutionary Affine Projection Algorithm. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 429–432. [Google Scholar]
- Paleologu, C.; Benesty, J.; Albu, F.; Ciochină, S. An Efficient Variable Step-Size Proportionate Affine Projection Algorithm. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 77–80. [Google Scholar]
- Gonzalez, A.; Albu, F.; Ferrer, M.; de Diego, M. Evolutionary and Variable Step Size Strategies for Multichannel Filtered-x Affine Projection Algorithms. IET Signal Process. 2012, 7, 471–476. [Google Scholar] [CrossRef]
- Albu, F.; Coltuc, D.; Comminiello, D.; Scarpiniti, M. The Variable Step Size Regularized Block Exact Affine Projection Algorithm. In Proceedings of the 10th International Symposium on Electronics and Telecommunications (ISETC), Timisoara, Romania, 15–16 November 2012; pp. 283–286. [Google Scholar]
- Bhotto, M.Z.A.; Ahmad, M.O.; Swamy, M.N.S. Robust Shrinkage Affine-Projection Sign Adaptive-Filtering Algorithms for Impulsive Noise Environments. IEEE Trans. Signal Process. 2014, 62, 3349–3359. [Google Scholar] [CrossRef]
- Ferrer, M.; de Diego, M.; Gonzalez, A.; Piñero, G. Convex Combination of Affine Projection Algorithms. In Proceedings of the European Signal Processing Conference (EUSIPCO), Glasgow, UK, 24–28 August 2009; pp. 431–435. [Google Scholar]
- Ferrer, M.; de Diego, M.; Gonzalez, A.; Piñero, G. Steady-State Mean Square Performance of the Multichannel Filtered-X Affine Projection Algorithm. IEEE Trans. Signal Process. 2012, 60, 2771–2785. [Google Scholar] [CrossRef]
- Arévalo, L.; Apolinário, J.A., Jr.; de Campos, M.L.R.; Sampaio-Neto, R. Convex Combination of Three Affine Projections Adaptive Filters. In Proceedings of the IEEE International Symposium on Wireless Communication Systems (ISWCS), Ilmenau, Germany, 27–30 August 2013; pp. 209–213. [Google Scholar]
- Shi, L.; Lin, Y.; Xie, X. Combination of Affine Projection Sign Algorithms for Robust Adaptive Filtering in Non-Gaussian Impulsive Interference. Electron. Lett. 2014, 50, 466–467. [Google Scholar] [CrossRef]
- Huang, F.; Zhang, J.; Zhang, S. Combined-Step-Size Affine Projection Sign Algorithm for Robust Adaptive Filtering in Impulsive Interference Environments. IEEE Trans. Circuits Syst. II Express Briefs 2016, 63, 493–497. [Google Scholar] [CrossRef]
- Choi, J.H.; Kim, S.H.; Kim, S.W. Adaptive Combination of Affine Projection and NLMS Algorithms. Signal Process. 2014, 100, 64–70. [Google Scholar] [CrossRef]
- Comminiello, D.; Scarpiniti, M.; Scardapane, S.; Parisi, R. Improving Nonlinear Modeling Capabilities of Functional Link Adaptive filters. Neural Netw. 2015, 69, 51–59. [Google Scholar] [CrossRef]
- Sayed, A.H. Adaptive Filters; Wiley: Hoboken, NJ, USA, 2008. [Google Scholar]
- Shin, H.C.; Sayed, A.H. Mean-Square Performance of a Family of Affine Projection Algorithms. IEEE Trans. Signal Process. 2004, 52, 90–102. [Google Scholar] [CrossRef]
- Sankaran, S.G.; Beex, A.A.L. Convergence Behavior of Affine Projection Algorithms. IEEE Trans. Signal Process. 2000, 48, 1086–1096. [Google Scholar] [CrossRef]
- Lázaro-Gredilla, M.; Azpicueta-Ruiz, L.A.; Figueiras-Vidal, A.R.; Arenas-García, J. Adaptively Biasing the Weights of Adaptive Filters. IEEE Trans. Signal Process. 2010, 58, 3890–3895. [Google Scholar] [CrossRef]
- Azpicueta-Ruiz, L.A.; Figueiras-Vidal, A.R.; Arenas-García, J. A Normalized Adaptation Scheme for the Convex Combination of Two Adaptive Filters. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Las Vegas, NV, USA, 31 March–4 April 2008; pp. 3301–3304. [Google Scholar]





© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Comminiello, D.; Scarpiniti, M.; Azpicueta-Ruiz, L.A.; Uncini, A. Steady-State Performance of an Adaptive Combined MISO Filter Using the Multichannel Affine Projection Algorithm. Algorithms 2019, 12, 2. https://doi.org/10.3390/a12010002
Comminiello D, Scarpiniti M, Azpicueta-Ruiz LA, Uncini A. Steady-State Performance of an Adaptive Combined MISO Filter Using the Multichannel Affine Projection Algorithm. Algorithms. 2019; 12(1):2. https://doi.org/10.3390/a12010002
Chicago/Turabian StyleComminiello, Danilo, Michele Scarpiniti, Luis A. Azpicueta-Ruiz, and Aurelio Uncini. 2019. "Steady-State Performance of an Adaptive Combined MISO Filter Using the Multichannel Affine Projection Algorithm" Algorithms 12, no. 1: 2. https://doi.org/10.3390/a12010002
APA StyleComminiello, D., Scarpiniti, M., Azpicueta-Ruiz, L. A., & Uncini, A. (2019). Steady-State Performance of an Adaptive Combined MISO Filter Using the Multichannel Affine Projection Algorithm. Algorithms, 12(1), 2. https://doi.org/10.3390/a12010002