Application of Angle Related Cost Function Optimization for Dynamic Path Planning Algorithm


Abstract
:1. Introduction
- (1)
- We enhance the effect of the loading mechanism for road maps by dividing the connected sub-net and building an spatial index;
- (2)
- We enhance the effect of dynamic path planning by optimizing the search direction.
2. Related Works
3. Problem Analysis
- (1)
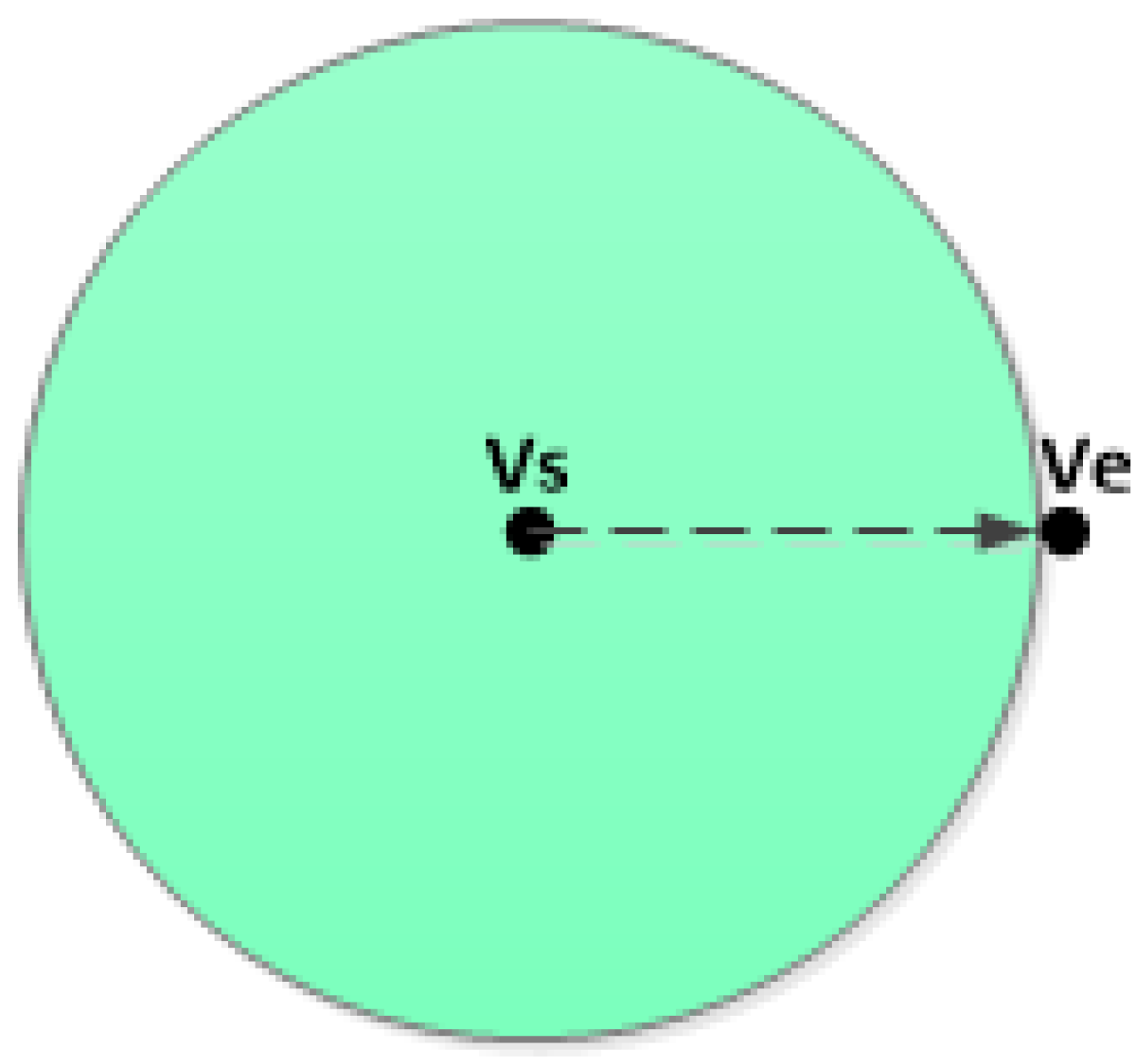
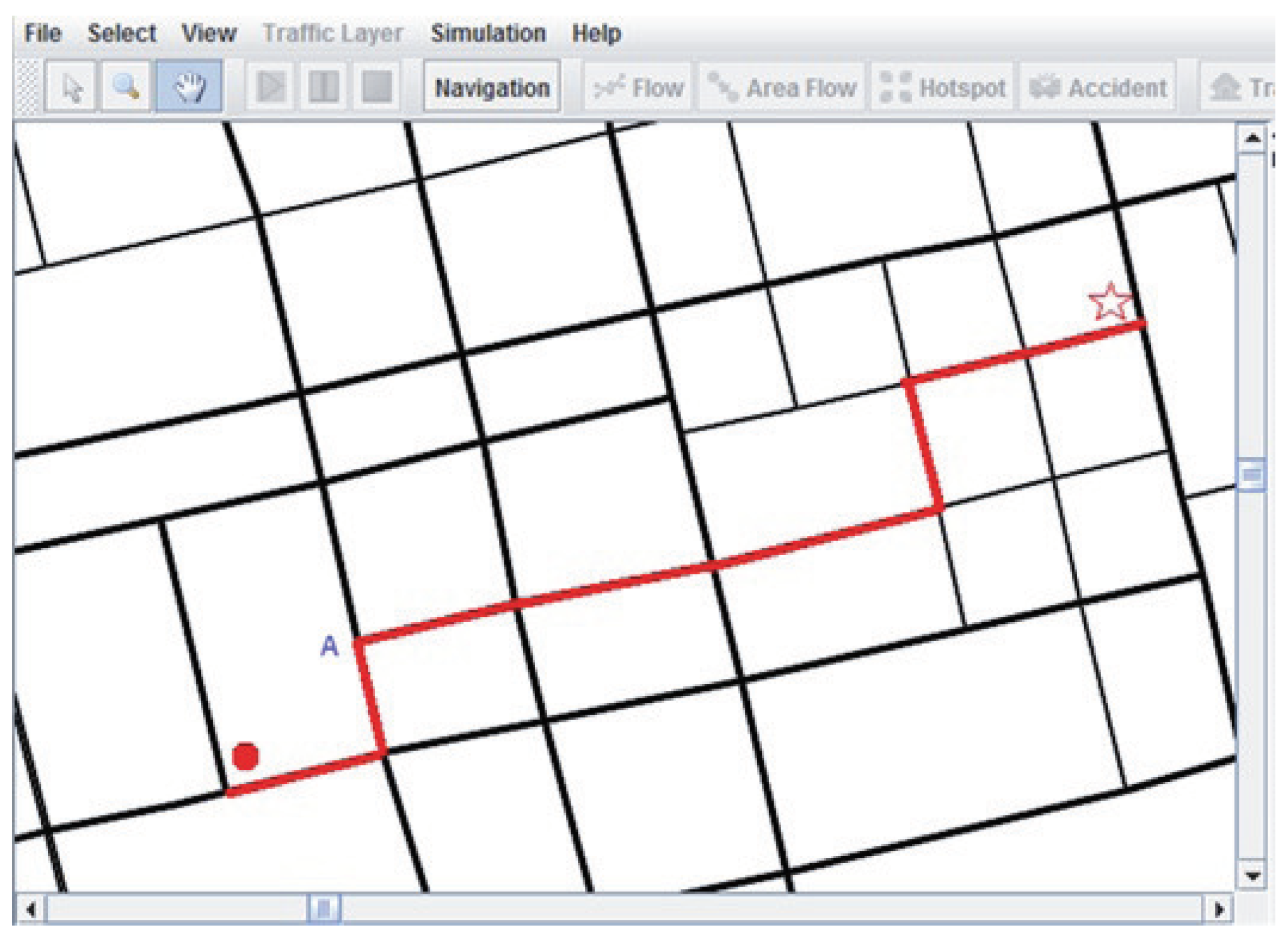
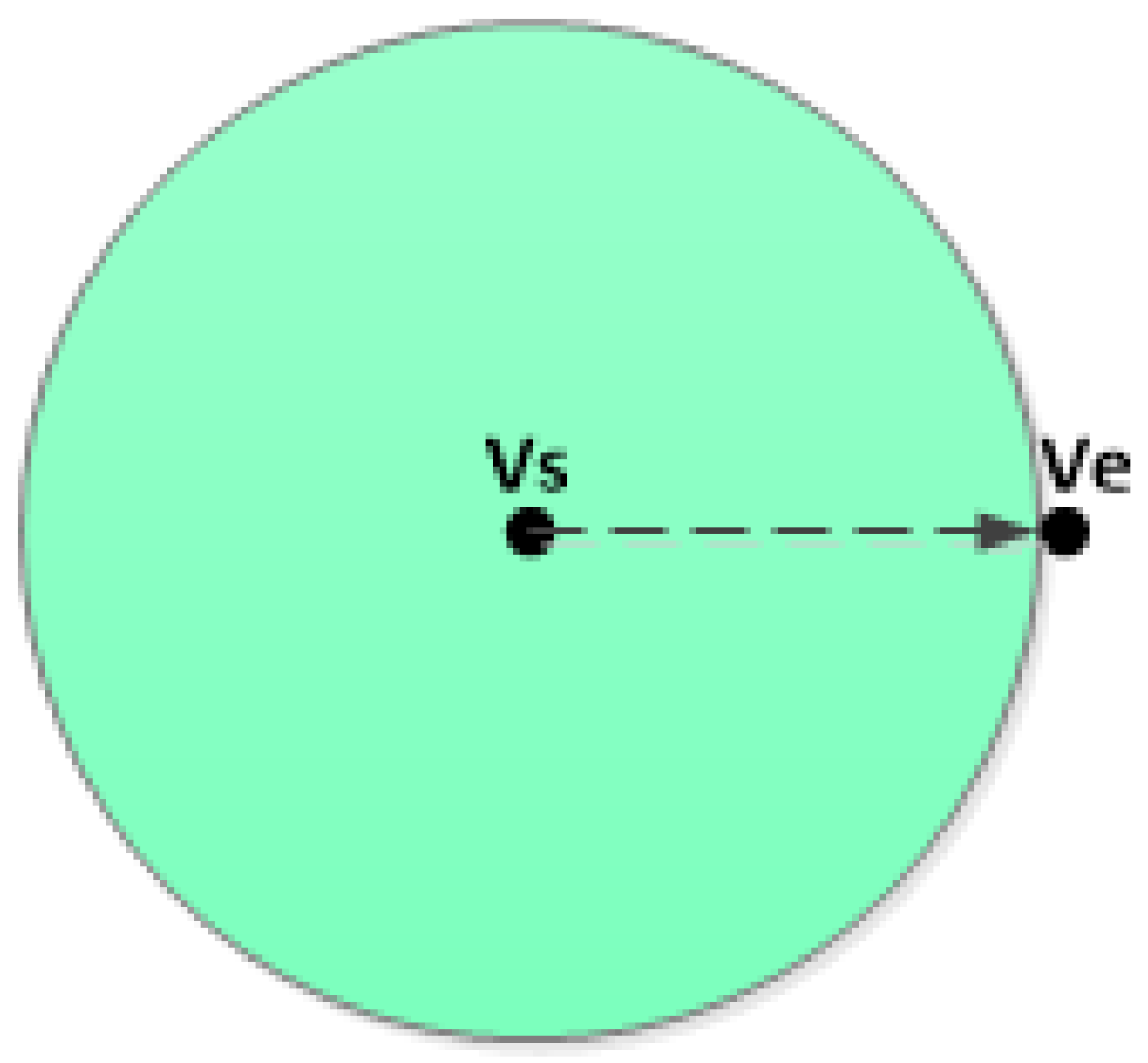
- Because of the strategy of global search, it is necessary to search all the nodes in the network. The search space is shown in Figure 1—it takes a lot of computation time and the time efficiency of the algorithm is low;
- (2)
- Because of the need to store intermediate results, when the network is large, it uses a lot of storage space.
4. The Spatial Optimized Dynamic Path Planning Algorithm
- (1)
- The scale of the road network was controlled. The urban road network was decomposed into different sub-nets. According to the location of the starting point, different sub-nets were chosen as the search space to avoid searching the whole road network, thus reducing the scale of network information updated in real time;
- (2)
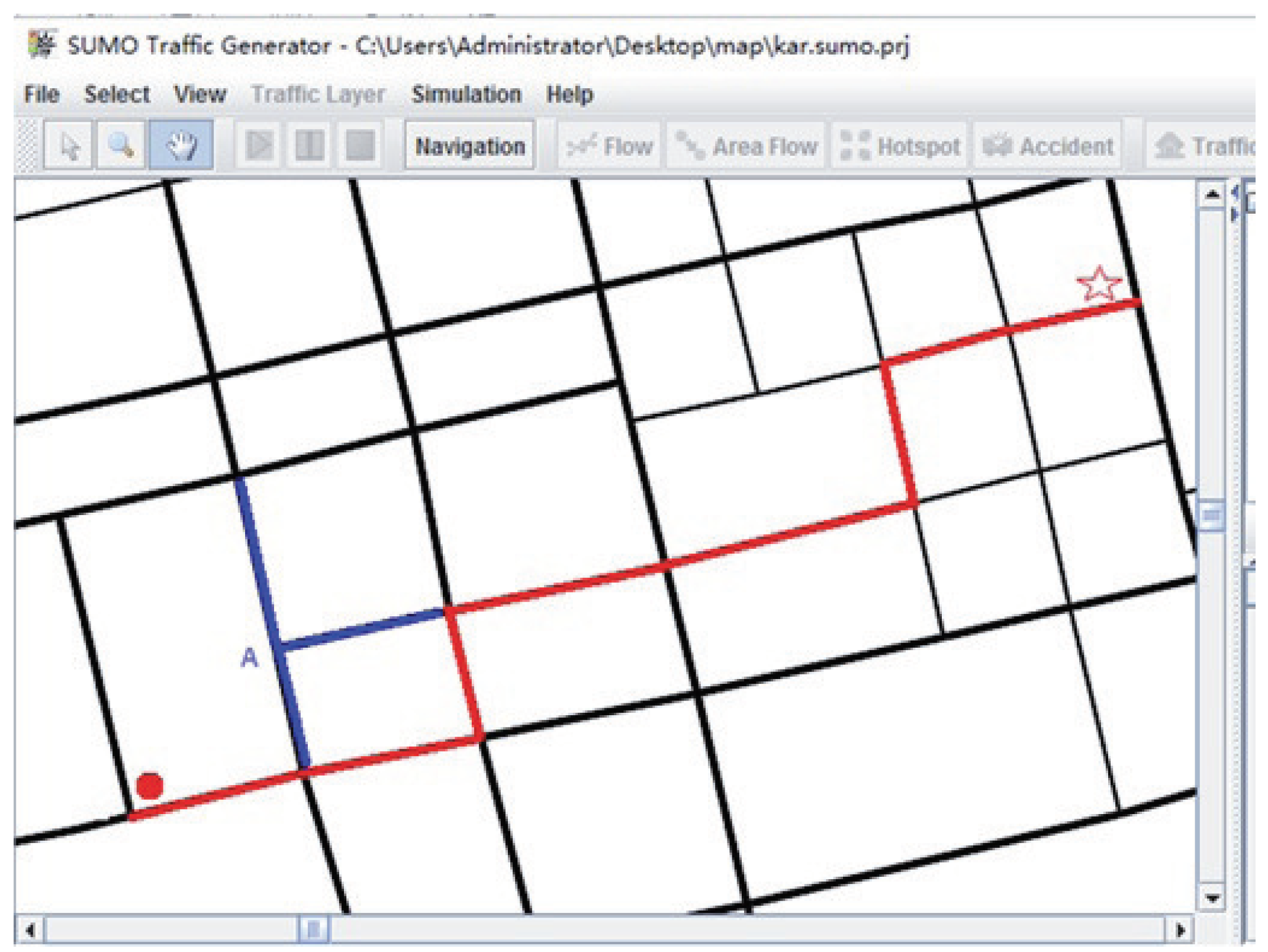
- The search direction wwas restricted. The evaluation function was optimized, considering both the distance and search direction. More heuristic information was used to reduce the search area and search time to speed up the convergence of the algorithm.
4.1. Control the Scale of the Road Network
4.1.1. Road Sub-Net Partition Considering Connectivity
4.1.2. Sub-Net Query Optimization Based on the Spatial Index
4.2. Restrict Search Direction
4.2.1. Analysis of the A* Algorithm Evaluation Method
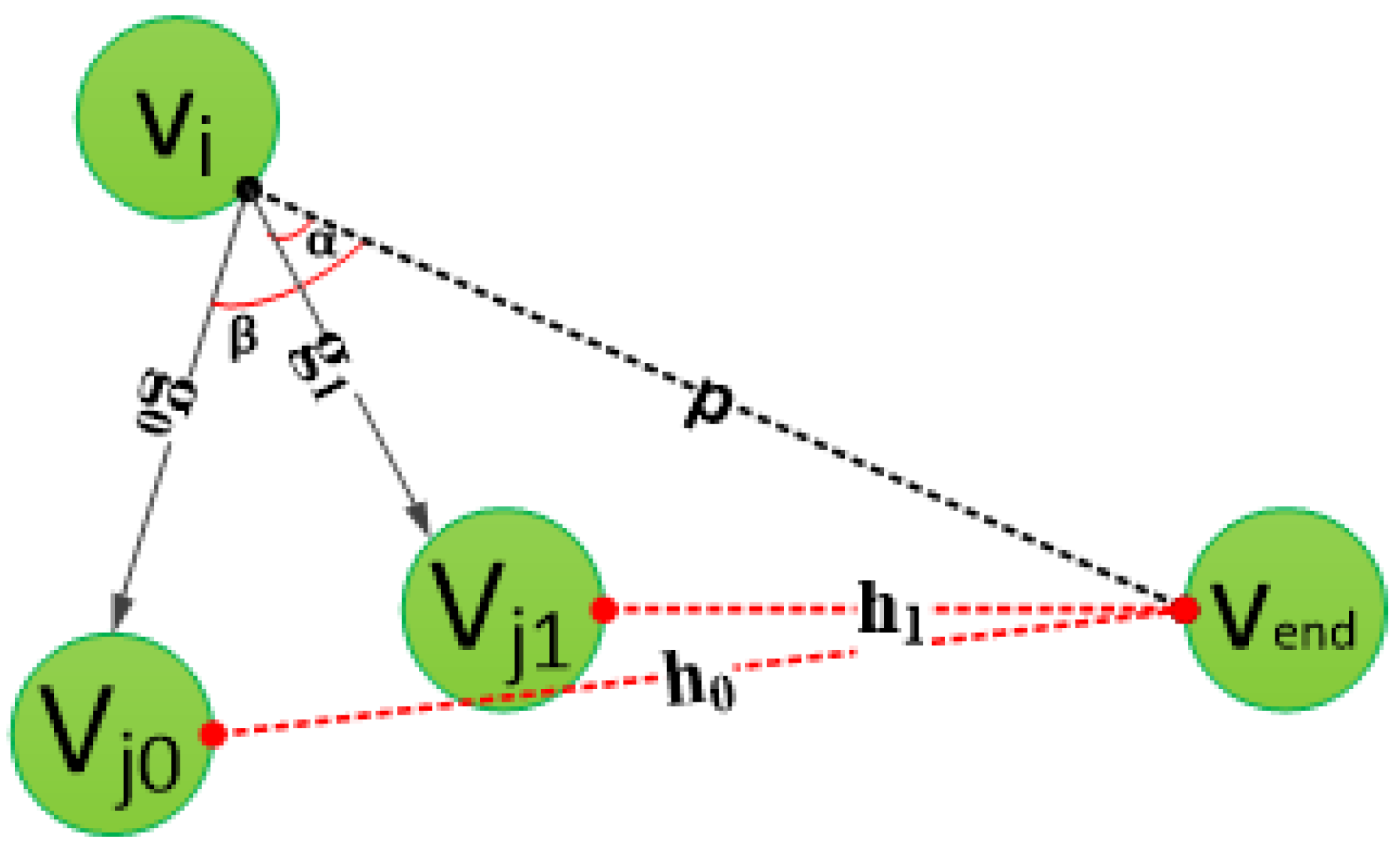
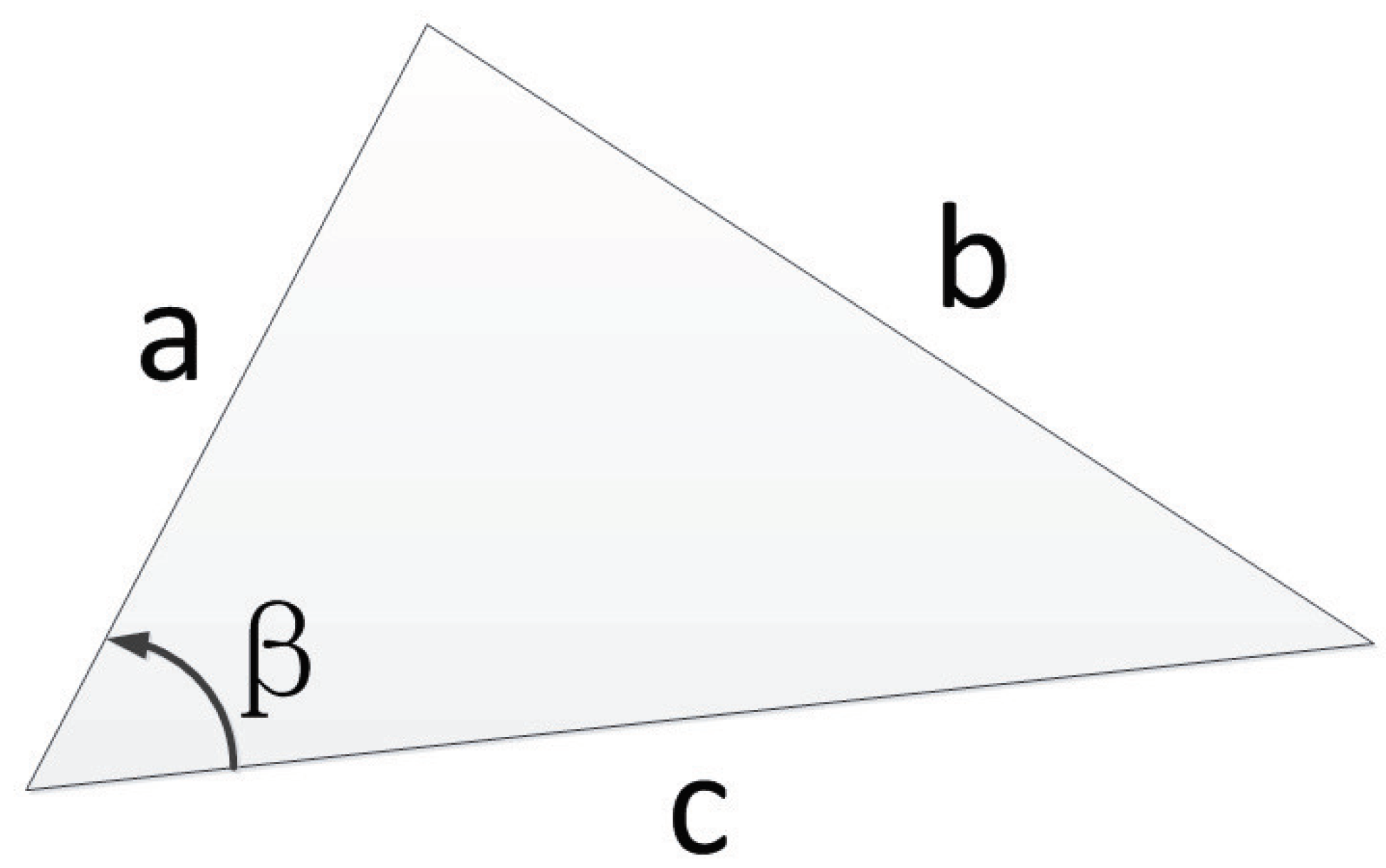
4.2.2. Search Direction Restricted Evaluation Method
- (1)
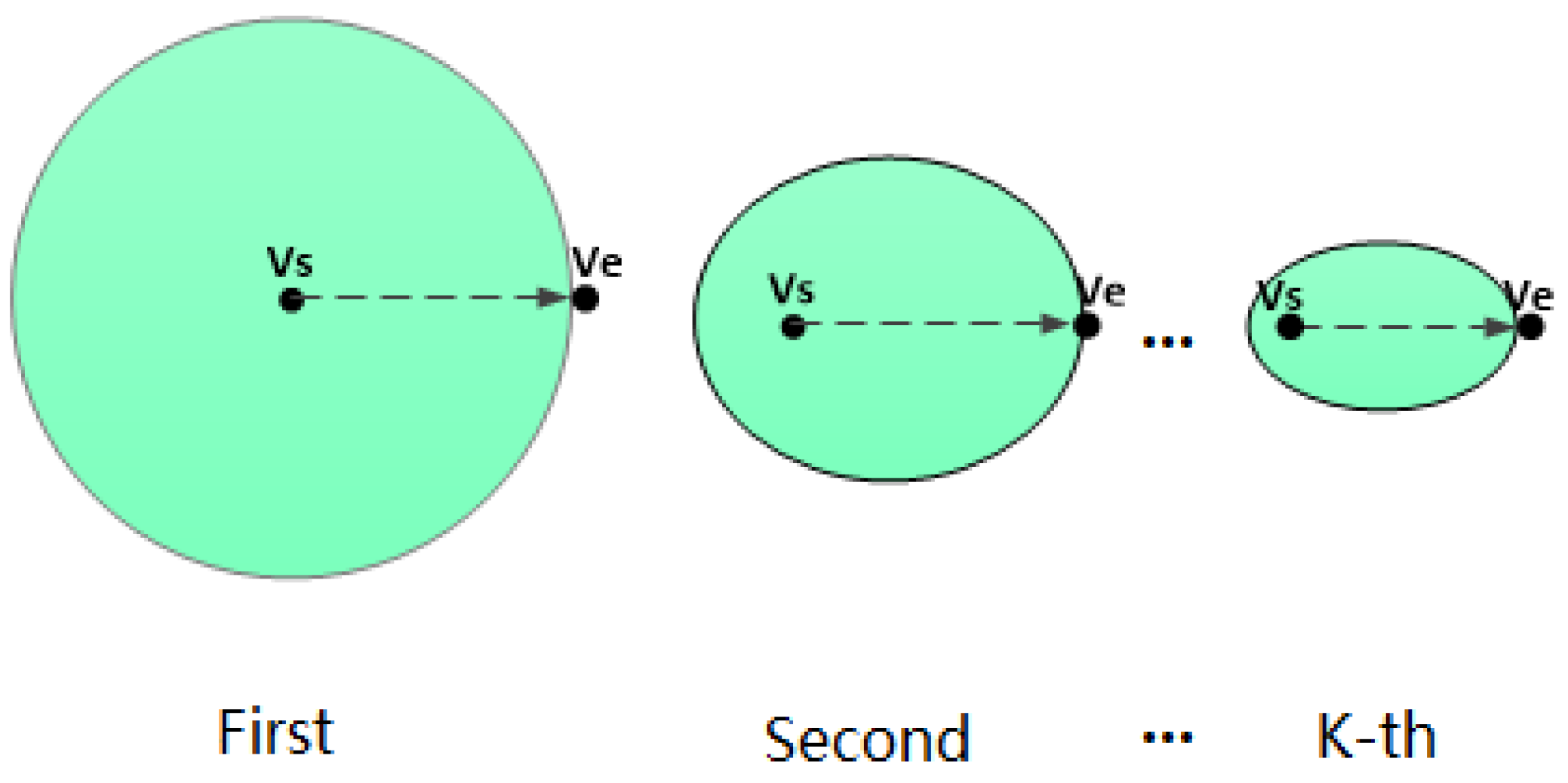
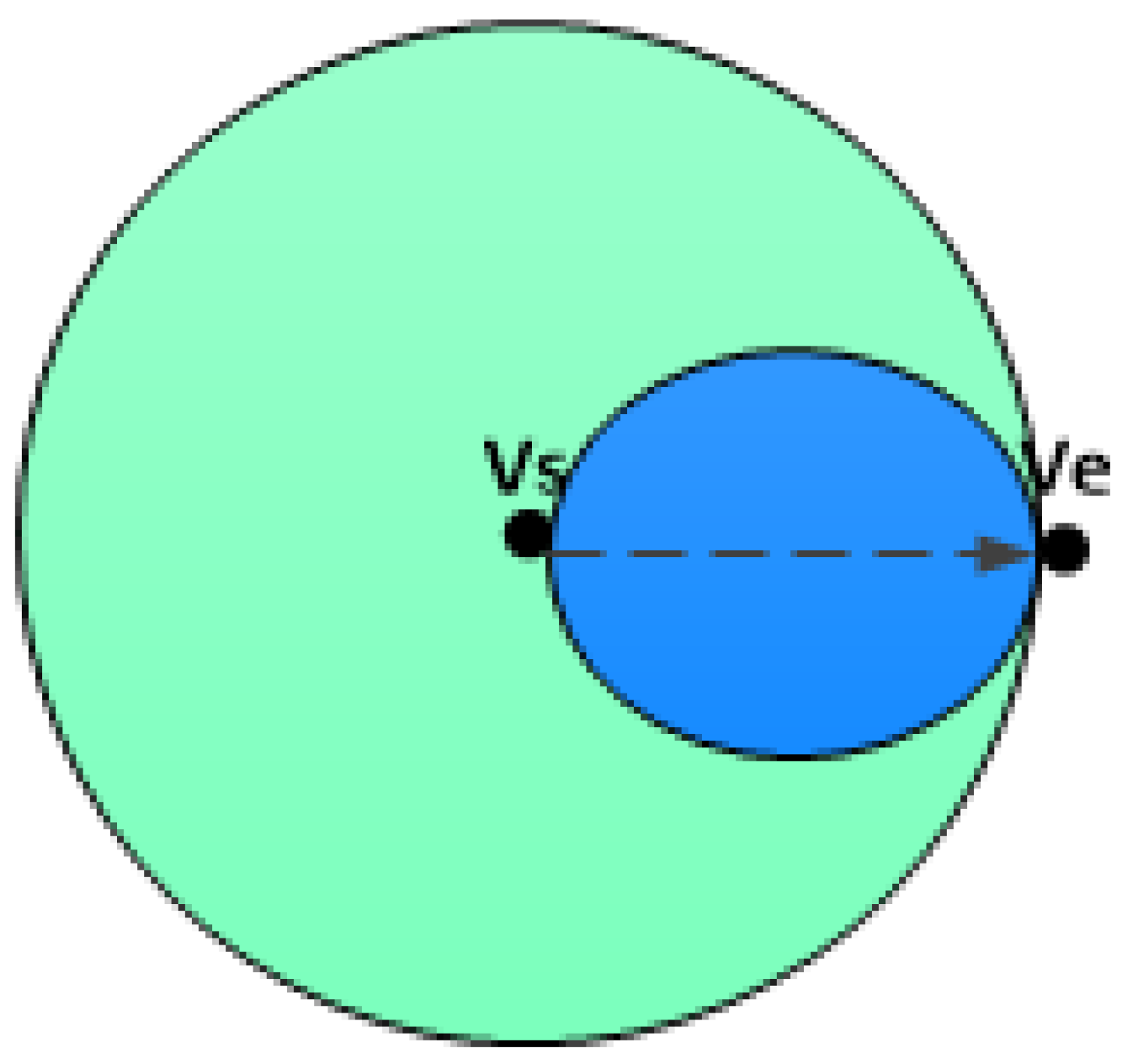
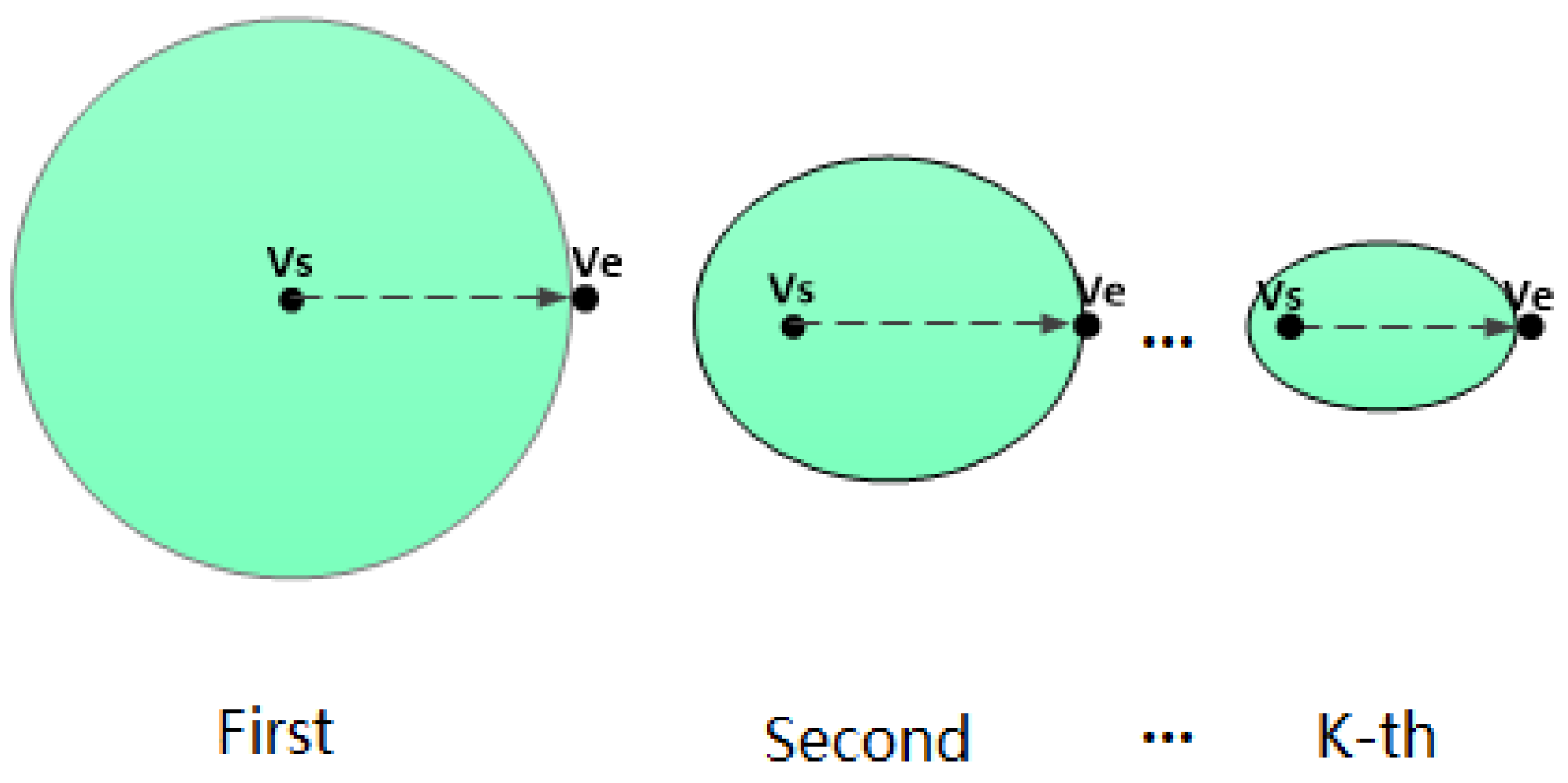
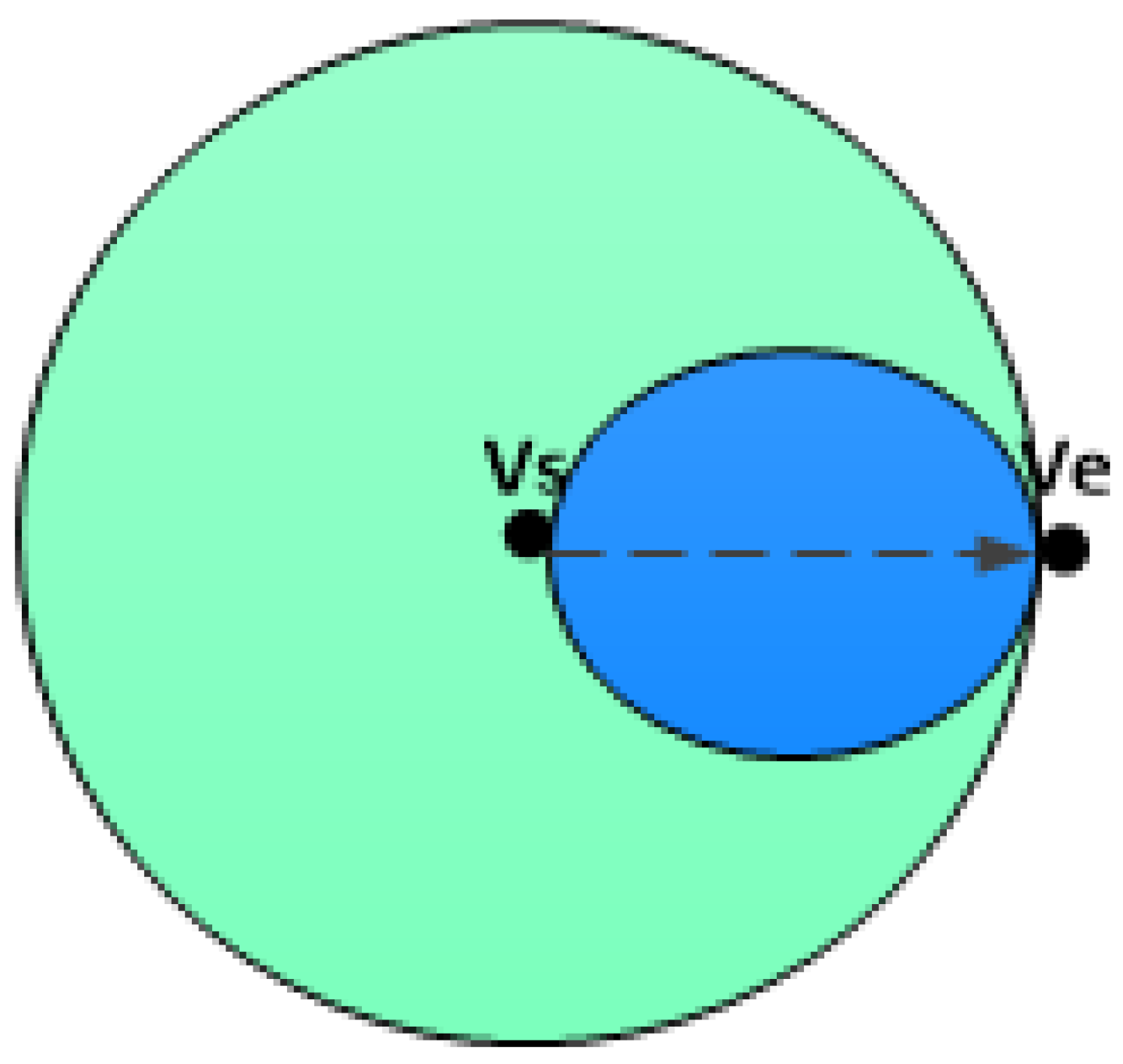
- needs to be a function increasing monotonously with the angle. According to the previous discussion, if we choose a search direction with a smaller angle to the current node and the end point (set the angle to ), we can find the shortest path as soon as possible. In addition, the smaller the angle (), the smaller the search area is. Therefore, it is necessary to design the function as a function that increases monotonously with . Thus, the less is, less the is, and the less h is. The algorithm can select a smaller search area with a greater opportunity to limit the direction of search;
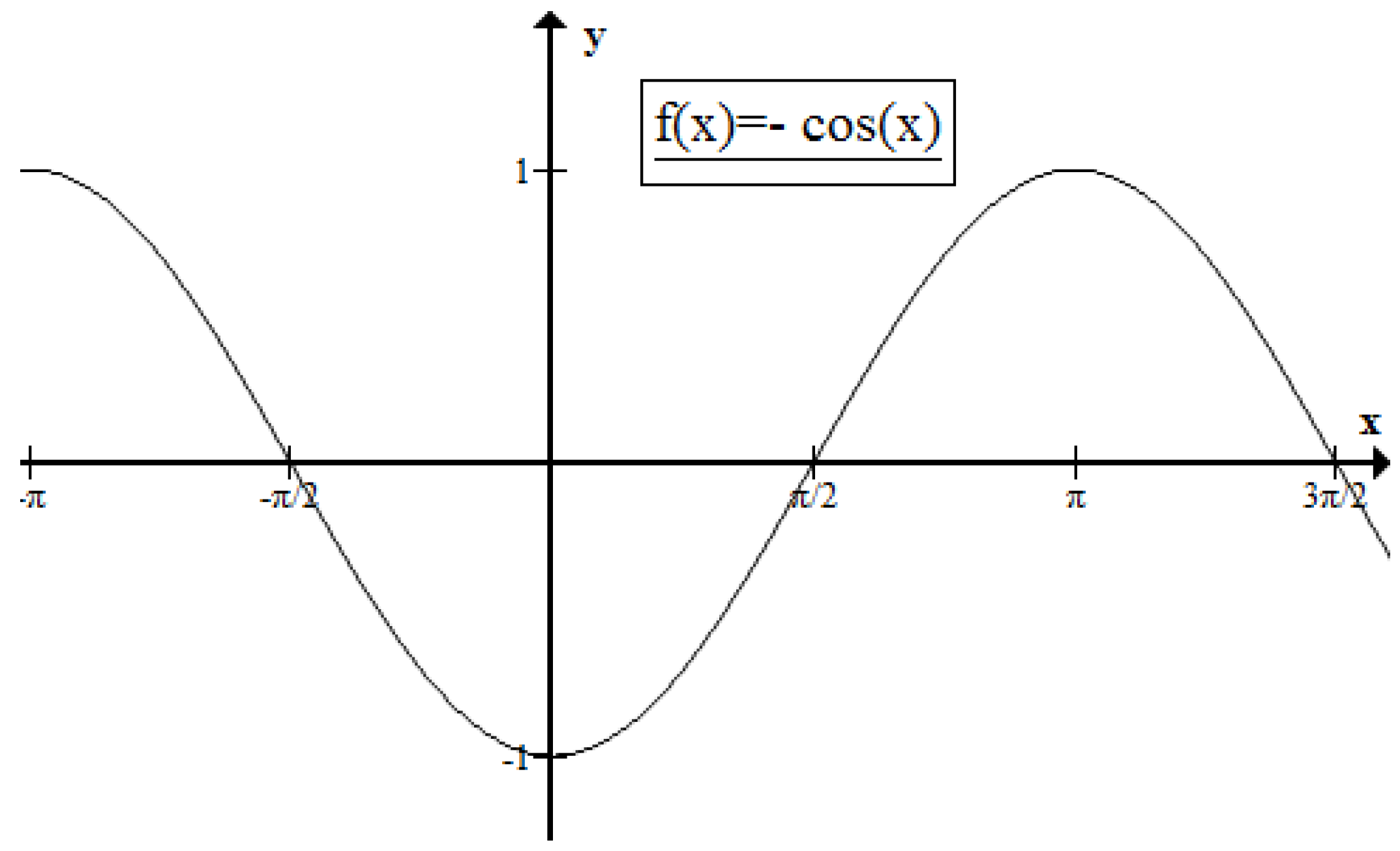
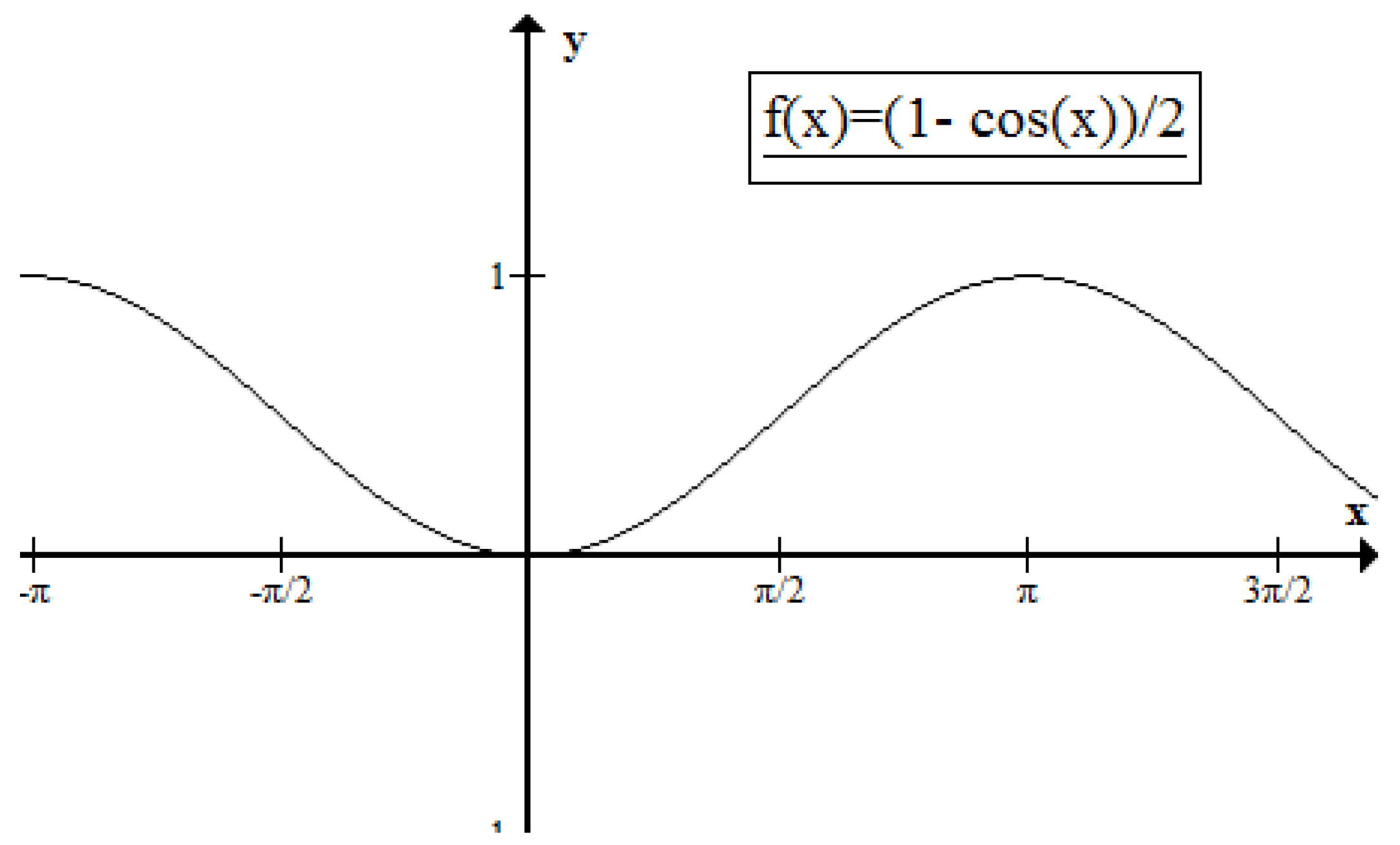
- (2)
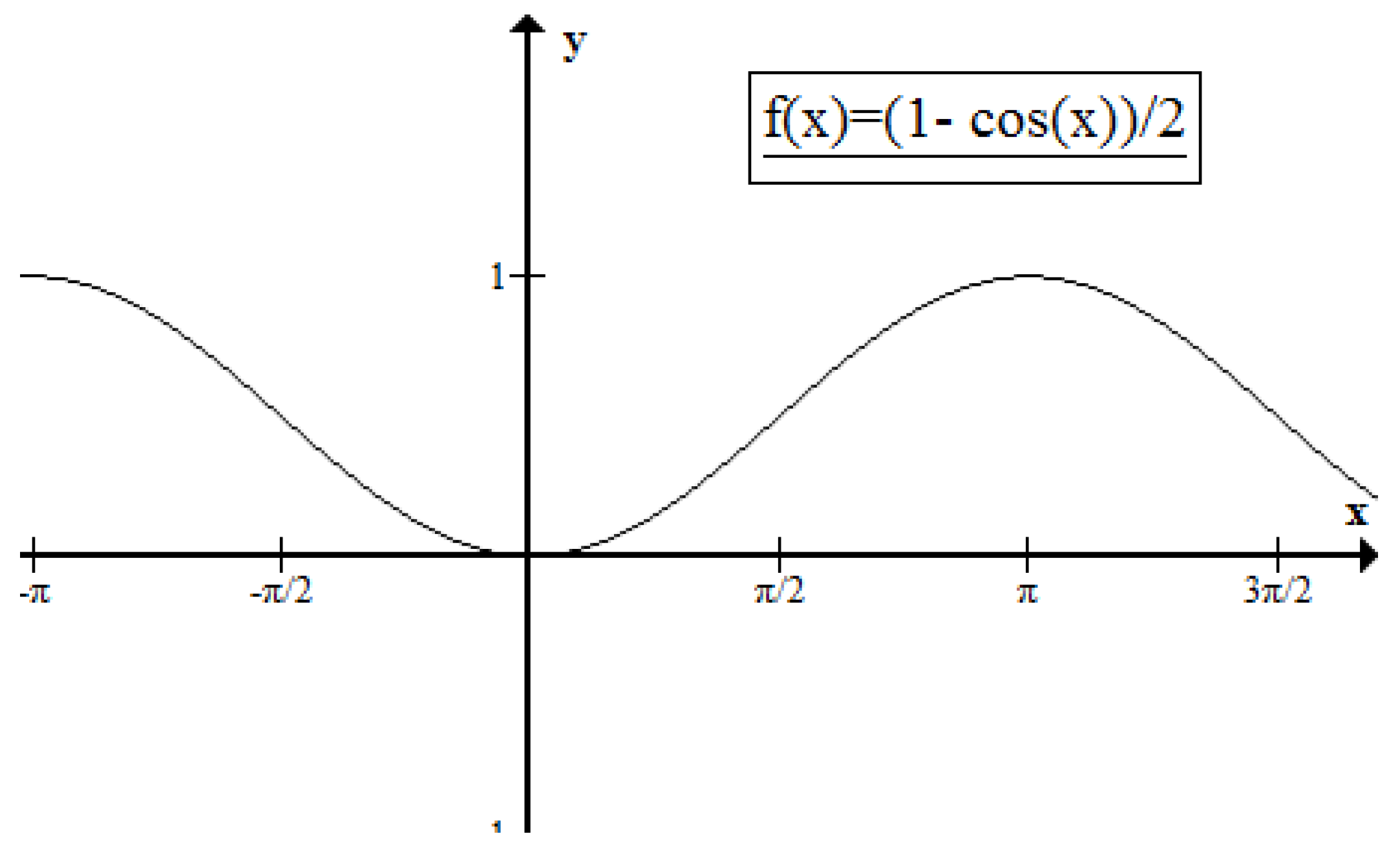
- The value of the evaluation function for the current node must be less than or equal to the actual distance from the current node to the destination which can be expressed as . That is, the value of must be less than or equal to 1, and since the estimated distance cannot be negative, the range of value of must fall within the interval .
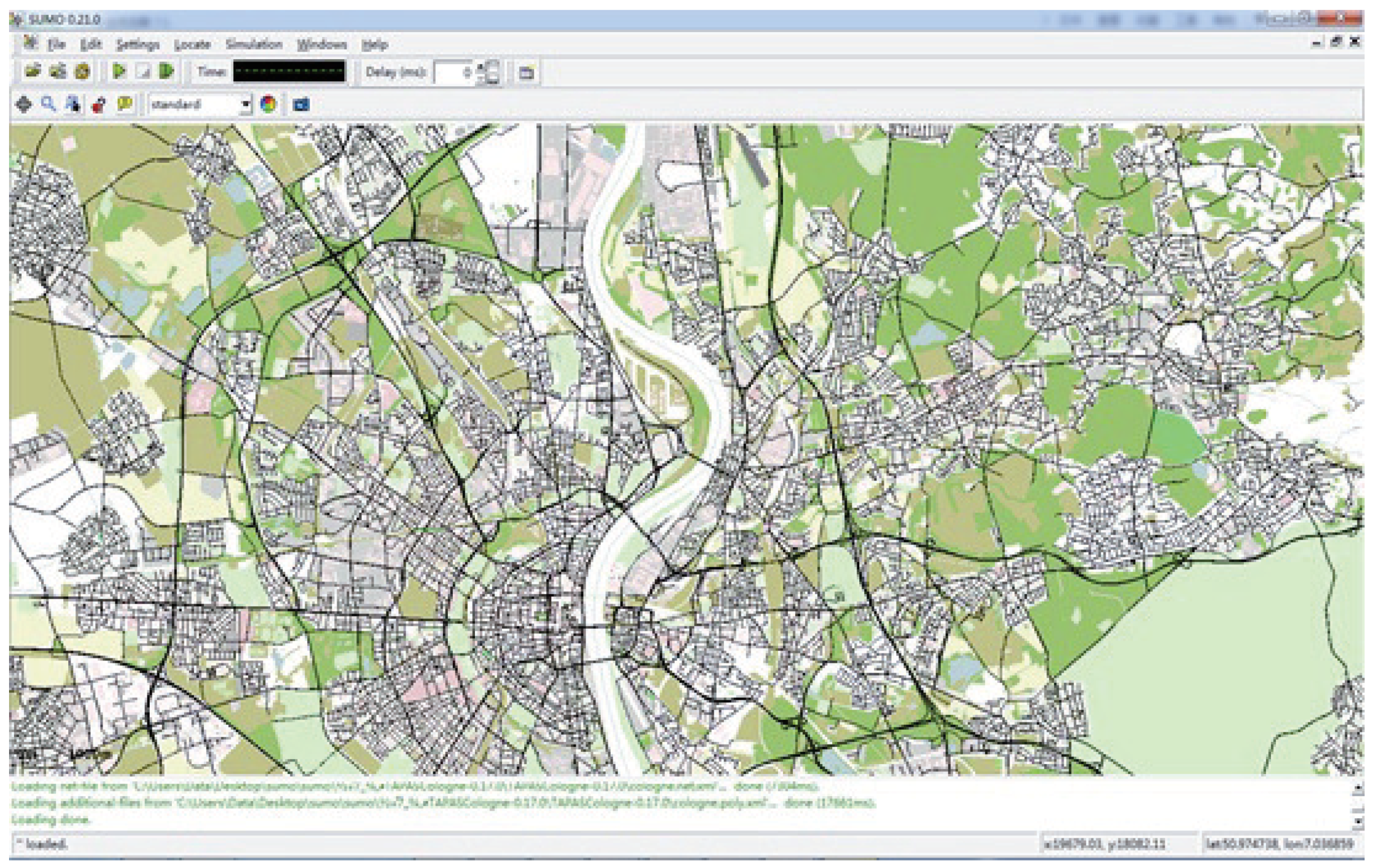
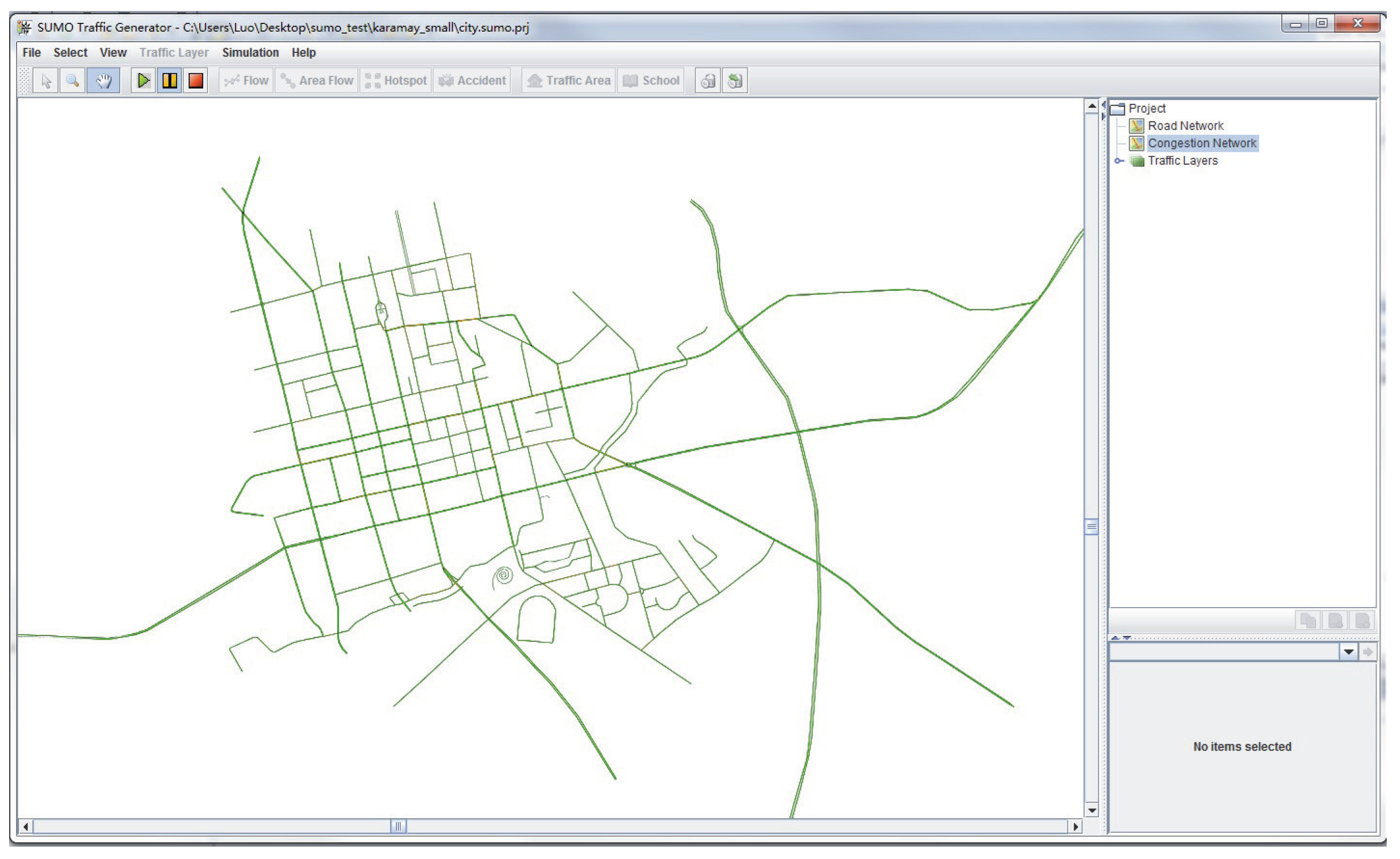
5. Experiments
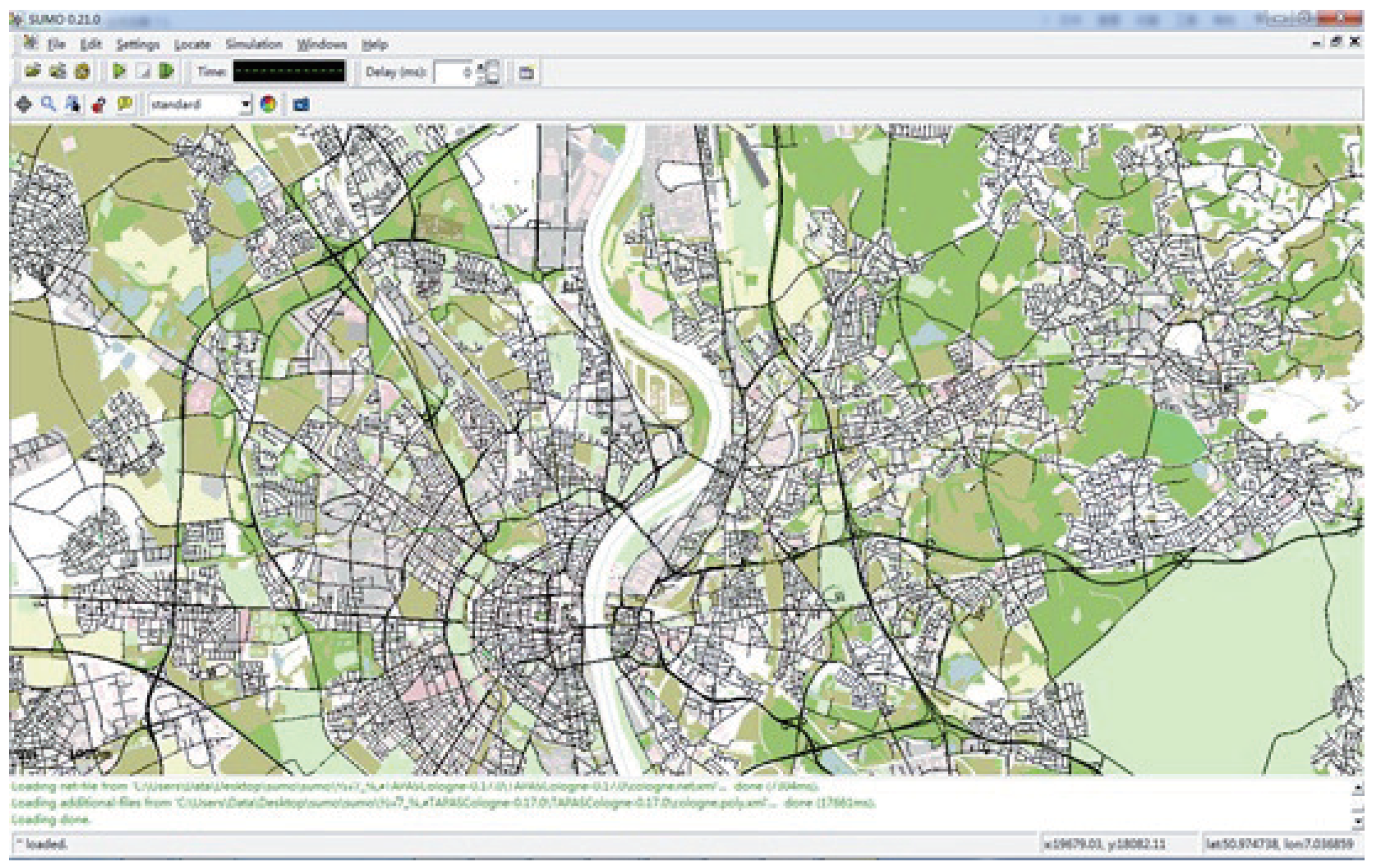
5.1. Experiment Framework
5.2. Results and Discussion
5.3. Extension of Our Method
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Tang, B.; Chen, Z.; Hefferman, G.; Pei, S.; Wei, T.; He, H.; Yang, Q. Incorporating intelligence in fog computing for big data analysis in smart cities. IEEE Trans. Ind. Inf. 2017, 13, 2140–2150. [Google Scholar] [CrossRef]
- Ball, J.E.; Anderson, D.T.; Chan, C.S. A comprehensive survey of deep learning in remote sensing: theories, tools and challenges for the community. J. Appl. Remote Sens. 2017, 11, 042609. [Google Scholar] [CrossRef]
- Hu, X.; Chen, L.; Tang, B.; Cao, D.; He, H. Dynamic path planning for autonomous driving on various roads with avoidance of static and moving obstacles. Mech. Syst. Signal Process. 2017, 100, 482–500. [Google Scholar] [CrossRef]
- Cascetta, E. Transportation Systems Analysis: Models and Applications, 2nd ed.; Springer: New York, NY, USA, 2009. [Google Scholar]
- De Dios OrtÃozar, J.; Willumsen, L.G. Modelling Transport, 4th ed.; John Wiley Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Ben-Akiva, M.; Bergman, M.J.; Daly, A.J.; Ramaswamy, R. Modeling inter-urban route choice behaviour. In Proceedings of the 9th International Symposium on Transportation and Traffic Theory, Delft, The Netherlands, 11–13 July 1984; pp. 299–330. [Google Scholar]
- De Maio, M.L.; Vitetta, A. Route choice on road transport system: A fuzzy approach. J. Intell. Fuzzy Syst. 2015, 28, 2015–2027. [Google Scholar] [CrossRef]
- Vitetta, A. A quantum utility model for route choice in transport systems. Travel Behav. Soc. 2016, 3, 29–37. [Google Scholar] [CrossRef]
- Mcginty, L.; Smyth, B. Personalised route planning: A case-based approach. In Proceedings of the 5th European Workshop on Advances in Case-Based Reasoning, Trento, Italy, 6–9 September 2000; pp. 431–442. [Google Scholar]
- Nie, Y.M.; Wu, X. Shortest path problem considering on-time arrival probability. Transport. Res. Part B Method 2009, 43, 597–613. [Google Scholar] [CrossRef]
- Choi, W.K.; Kim, S.J.; Kang, T.G.; Jeon, H.T. Study on method of route choice problem based on user preference. In Proceedings of the International Conference of Knowledge-Based Intelligent Information and Engineering Systems, Vietri sul Mare, Italy, 12–14 September 2007; pp. 645–652. [Google Scholar]
- Gass, S.I.; Fu, M.C. Dijkstra’s Algorithm. In Encyclopedia of Operations Research & Management Science; Springer: New York, NY, USA, 2002; pp. 273–315. [Google Scholar]
- Tan, G.Z.; He, H.; Aaron, S. Global optimal path planning for mobile robot based on improved Dijkstra algorithm and ant system algorithm. J. Cent. South Univ. 2006, 13, 80–86. [Google Scholar] [CrossRef]
- Johnson, D.B. A note on dijkstra’s shortest path algorithm. J. ACM 1973, 20, 385–388. [Google Scholar] [CrossRef]
- Dorigo, M.; Gambardella, L.M.; Birattari, M.; Martinoli, A.; Poli, R.; Stützle, T. Ant Colony Optimization and Swarm Intelligence; Springer: New York, NY, USA, 2006. [Google Scholar]
- Xie, J.; Cai, C. An ant colony algorithm on continuous searching space. Int. Symp. Multispectral Image Process. Pattern Recognit. 2015, 9814, 981402. [Google Scholar]
- Siregar, B.; Gunawan, D.; Andayani, U.; Lubis, E.S.; Fahmi, F. Food delivery system with the utilization of vehicle using Geographical Information System (GIS) and A Star algorithm. J. Phys. Conf. Ser. 2017, 801, 012038. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, Z. A multiple mobile robots path planning algorithm Based on A-star and Dijkstra algorithm. Int. J. Smart Home 2014, 8, 75–86. [Google Scholar] [CrossRef]
- Cheng, L.P.; Liu, C.X.; Yan, B. Improved hierarchical A-star algorithm for optimal parking path planning of the large parking lot. In Proceedings of the IEEE International Conference on Information and Automation, Hailar, China, 28–30 July 2014; pp. 695–698. [Google Scholar]
- Bast, H.; Delling, D.; Goldberg, A.; Müller-Hannemann, M.; Pajor, T.; Peter, S.; Wagner, D.; Werneck, R.F. Algorithm Engineering; Springer: New York, NY, USA, 2016; pp. 541–550. [Google Scholar]
- Samet, H.; Sankaranarayanan, J.; Alborzi, H. Scalable network distance browsing in spatial databases. In Proceedings of the ACM SIGMOD International Conference on Management of Data, Vancouver, Canada, 9–12 June 2008; pp. 43–54. [Google Scholar]
- Xu, Z.P.; Lin, K. An algorithm based on improved A* restrictions on the path to search regional planning approach. Comput. Knowl. Tech. 2008, 21, 055. [Google Scholar]
- Mainali, M.K.; Mabu, S.; Yu, S.; Eto, S.; Hirasawa, K. Dynamic optimal route search algorithm for car navigation systems with preferences by dynamic programming. Trans. Electr. Electron. Eng. 2011, 6, 14–22. [Google Scholar] [CrossRef]
- Tang, H.; Liang, Y.; Huang, Z.; Wang, T.; He, L.; Du, Y.; Ding, G. Key technology of real-time road navigation method based on intelligent data research. Comput. Intell. Neurosci. 2016, 2016, 4. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Efficiency | Complexity | Convergence | Robustness | Optimal Solution | |
|---|---|---|---|---|---|
| Dijkstra | Wose | Easy | No | Good | Yes |
| A* | Good | Easy | Yes | Good | Yes |
| ACA | Worst | Complex | Yes | Good | Not |
| Evaluation Standard | Dijkstra | A* | ACA | SODPP |
|---|---|---|---|---|
| Start Point | 34,091 | 34,091 | 34,091 | 34,091 |
| End Point | 34,201 | 34,201 | 34,201 | 34,201 |
| Total Points | 826 | 826 | 826 | 826 |
| Load Points | 826 | 826 | 826 | 42 |
| Load Time | 851 ms | 836 ms | 801 ms | 151 ms |
| Construct Time | 1162 ms | 1167 ms | 1087 ms | 126 ms |
| Search Points | 76 | 37 | 82 | 23 |
| Total Time | 17 ms | 9 ms | 63 ms | 5 ms |
| Path Length | 2290.95 m | 2290.95 m | 2295.08 m | 2290.95 m |
| Evaluation Standard | Dijkstra | A* | ACA | SODPP |
|---|---|---|---|---|
| Start Point | 33,898 | 33,898 | 33,898 | 33,898 |
| End Point | 34,100 | 34,100 | 34,100 | 34,100 |
| Total Points | 826 | 826 | 826 | 826 |
| Load Points | 826 | 826 | 826 | 156 |
| Load Time | 890 ms | 860 ms | 801 ms | 210 ms |
| Construct Time | 1208 ms | 1162 ms | 1093 ms | 172 ms |
| Search Points | 204 | 147 | 224 | 92 |
| Total Time | 176 ms | 152 ms | 2438 ms | 85 ms |
| Path Length | 2832.47 m | 2832.47 m | 3086.84 m | 2832.47 m |
| Evaluation Standard | Dijkstra | A* | ACA | SODPP |
|---|---|---|---|---|
| Start Point | 33,766 | 33,766 | 33,766 | 33,766 |
| End Point | 33,966 | 33,966 | 33,966 | 33,966 |
| Total Points | 826 | 826 | 826 | 826 |
| Load Points | 826 | 826 | 826 | 257 |
| Load Time | 860 ms | 875 ms | 801 ms | 410 ms |
| Construct Time | 1186 ms | 1167 ms | 1109 ms | 264 ms |
| Search Points | 348 | 212 | 394 | 134 |
| Total Time | 2564 ms | 2110 ms | 18,057 ms | 1142 ms |
| Path Length | 21,415.83 m | 21,415.83 m | 22,365.50 m | 21,415.83 m |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, M.; Yang, X.; Wang, M.; Xu, B. Application of Angle Related Cost Function Optimization for Dynamic Path Planning Algorithm. Algorithms 2018, 11, 127. https://doi.org/10.3390/a11080127
Zeng M, Yang X, Wang M, Xu B. Application of Angle Related Cost Function Optimization for Dynamic Path Planning Algorithm. Algorithms. 2018; 11(8):127. https://doi.org/10.3390/a11080127
Chicago/Turabian StyleZeng, Mingbin, Xu Yang, Mengxing Wang, and Bangjiang Xu. 2018. "Application of Angle Related Cost Function Optimization for Dynamic Path Planning Algorithm" Algorithms 11, no. 8: 127. https://doi.org/10.3390/a11080127
APA StyleZeng, M., Yang, X., Wang, M., & Xu, B. (2018). Application of Angle Related Cost Function Optimization for Dynamic Path Planning Algorithm. Algorithms, 11(8), 127. https://doi.org/10.3390/a11080127