The Gradient and the Hessian of the Distance between Point and Triangle in 3D


Abstract
:1. Introduction
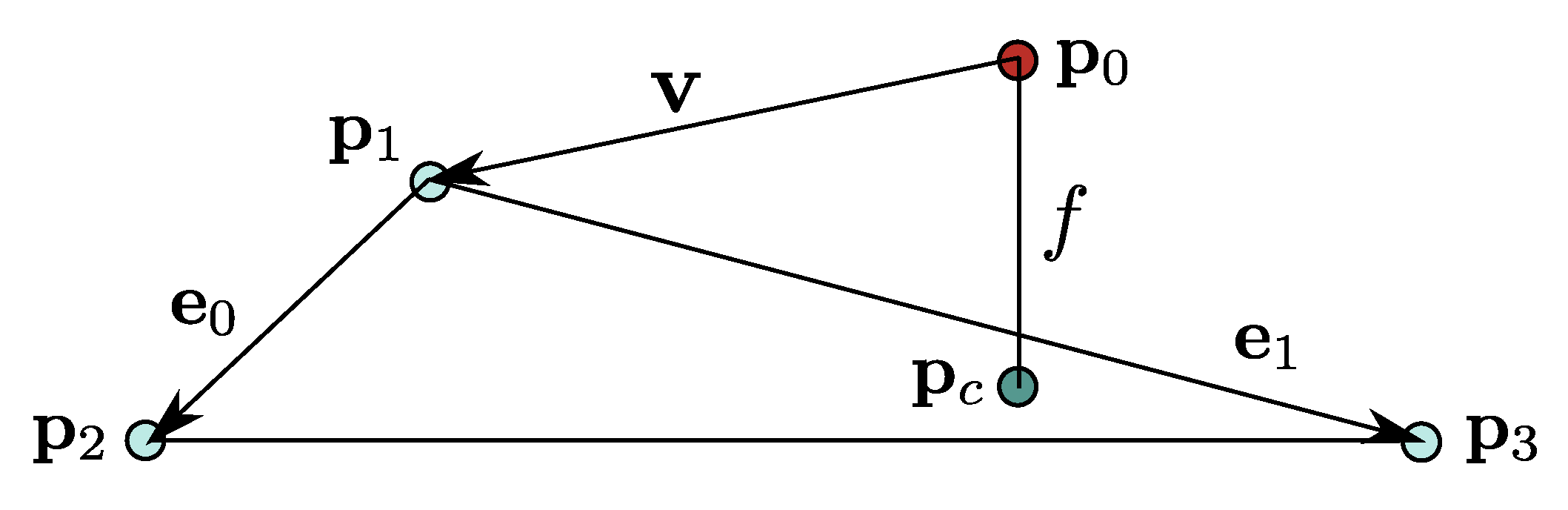
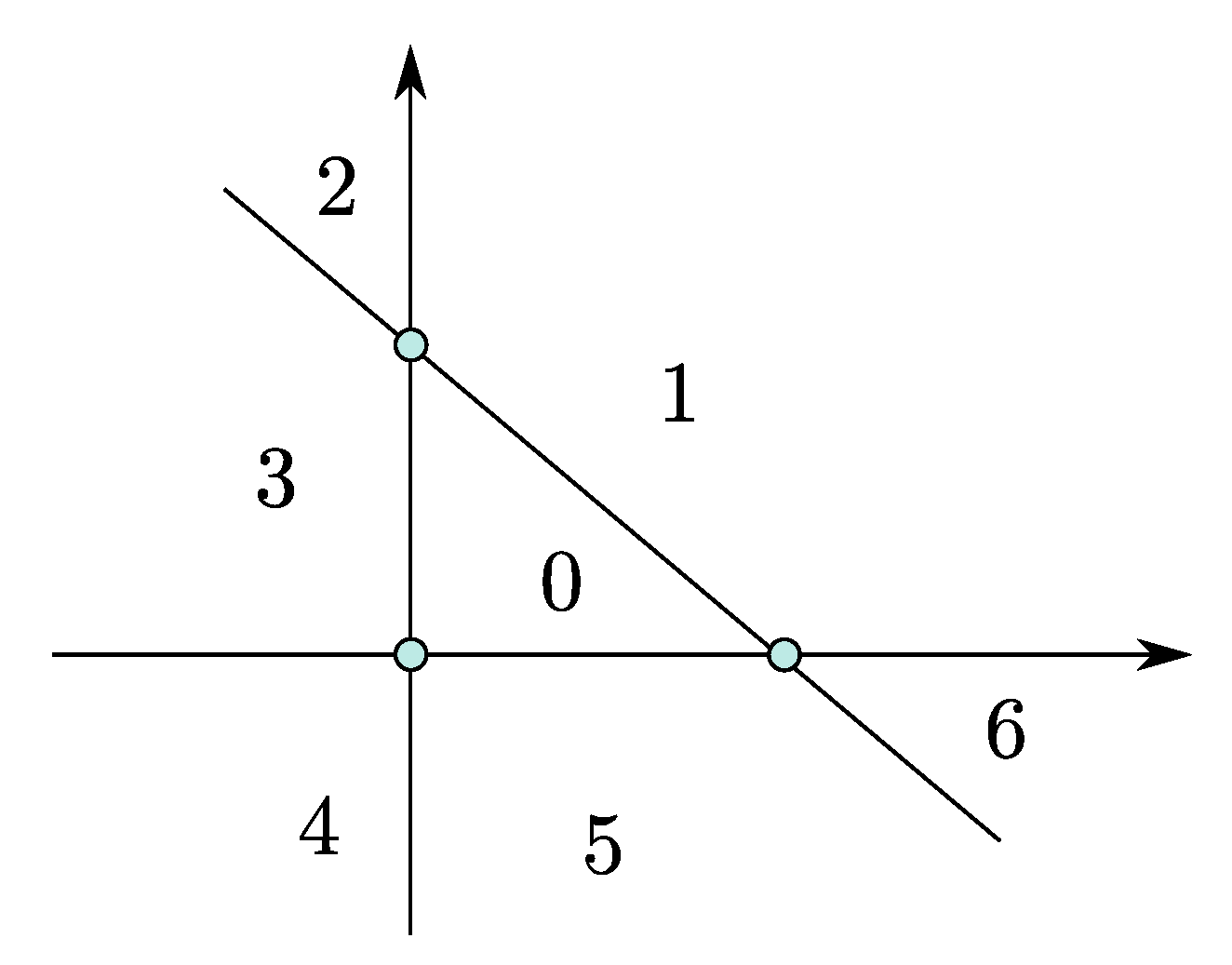
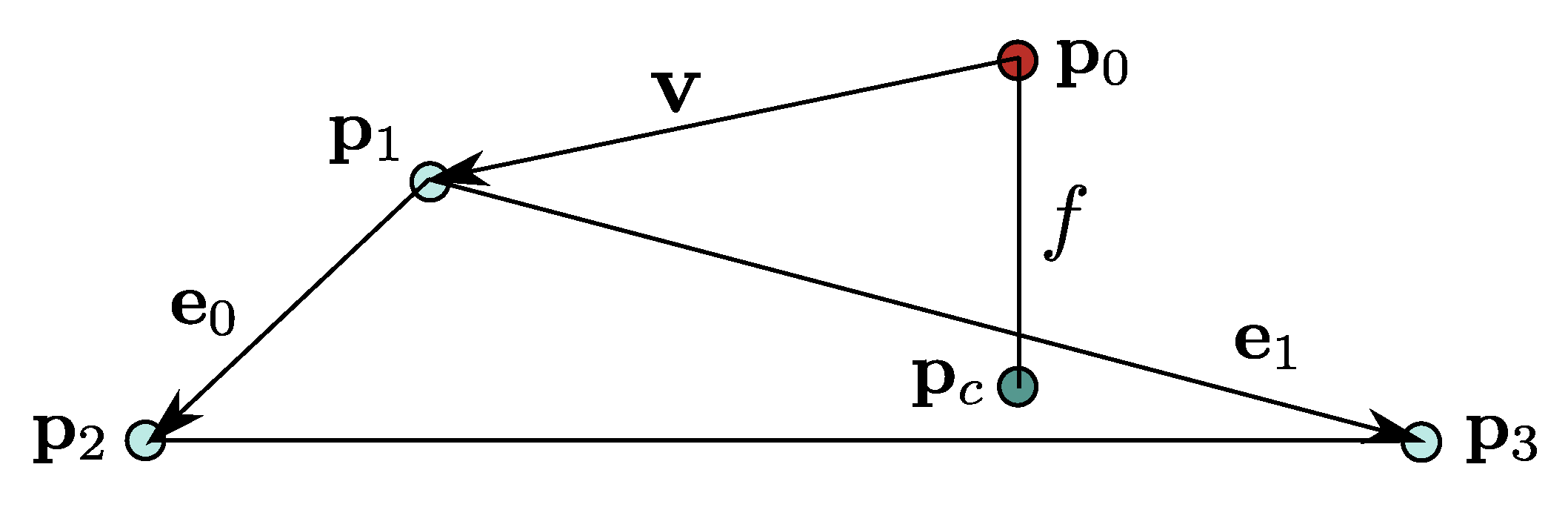
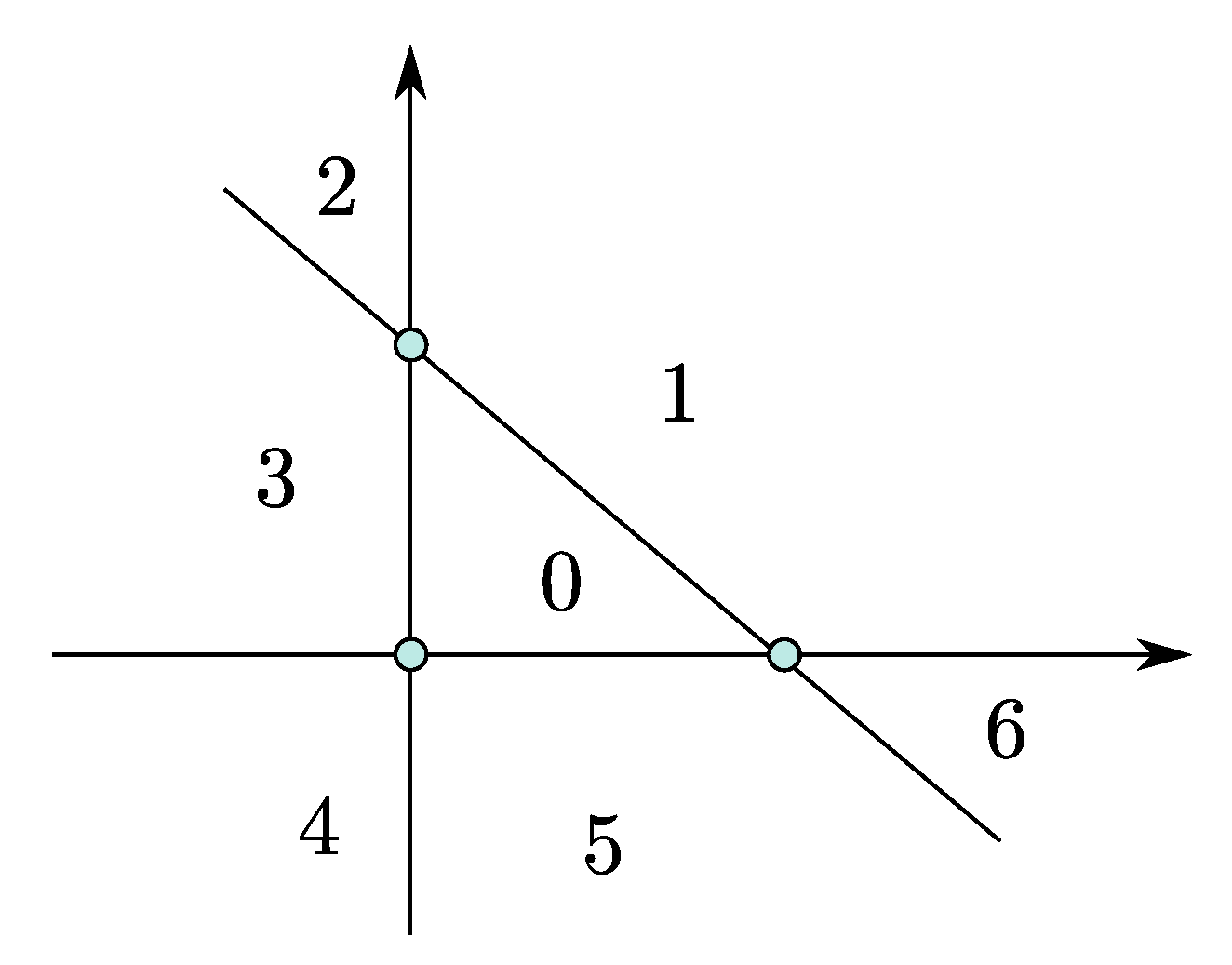
2. Mathematical Formulation
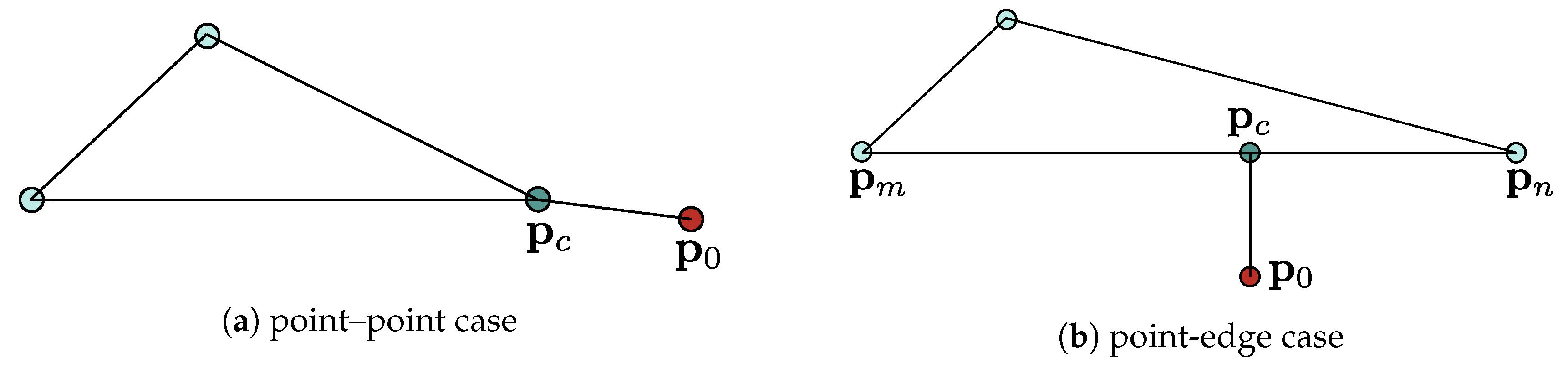
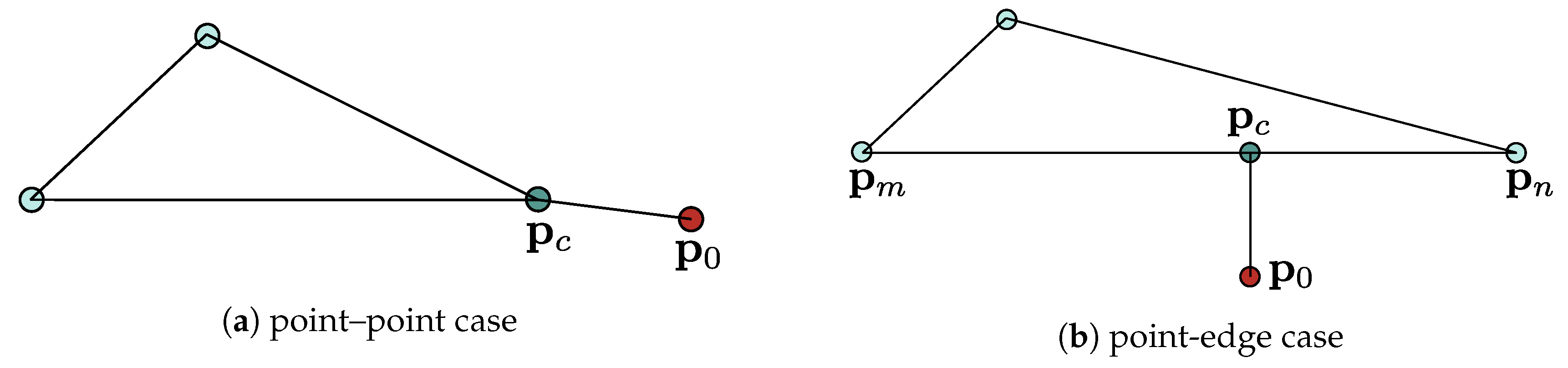
3. Point-Edge and Point-Point Cases
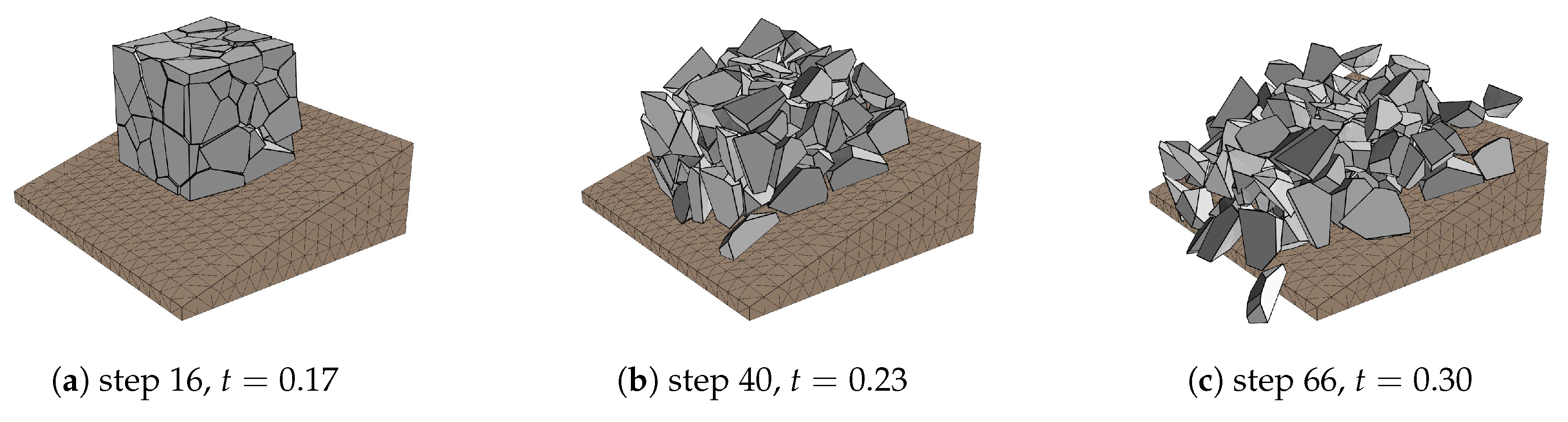
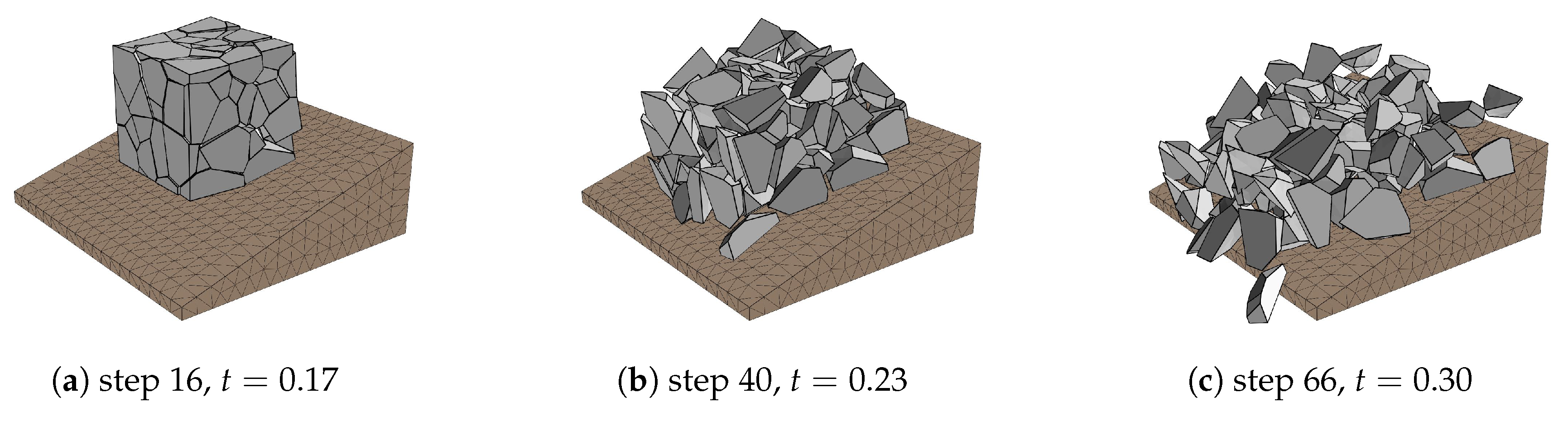
4. Algorithm and Testing
Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Second Derivatives of Coefficients a,b,c,d,e
References
- Eberly, D. Distance between Point and Triangle in 3D. 1999. Available online: https://www.geometrictools.com/Documentation/DistancePoint3Triangle3.pdf.pdf (accessed on 9 July 2018).
- Laursen, T.A. Computational Contact and Impact Mechanics: Fundamentals of Modeling Interfacial Phenomena in Nonlinear Finite Element Analysis; Springer Science & Business Media: Heidelberg/Berlin, Germany, 2013. [Google Scholar]
- Pfaff, T.; Narain, R.; De Joya, J.M.; O’Brien, J.F. Adaptive tearing and cracking of thin sheets. ACM Trans. Graph. 2014, 33, 110. [Google Scholar] [CrossRef]
- Fisher, S.; Lin, M.C. Fast penetration depth estimation for elastic bodies using deformed distance fields. In Proceedings of the Intelligent Robots and Systems, Maui, HI, USA, 29 October–3 November 2001; Volume 1, pp. 330–336. [Google Scholar]
- Weisstein, E.W. Point-Line Distance–3-Dimensional. MathWorld–A Wolfram Web Resource. Available online: http://mathworld.wolfram.com/Point-LineDistance3-Dimensional.html (accessed on 10 July 2018).
- Gribanov, I. Distance Derivatives, GitHub Repository. Available online: https://github.com/Spear520/dist/ (accessed on 10 July 2018).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error Measure | Value |
|---|---|
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gribanov, I.; Taylor, R.; Sarracino, R. The Gradient and the Hessian of the Distance between Point and Triangle in 3D. Algorithms 2018, 11, 104. https://doi.org/10.3390/a11070104
Gribanov I, Taylor R, Sarracino R. The Gradient and the Hessian of the Distance between Point and Triangle in 3D. Algorithms. 2018; 11(7):104. https://doi.org/10.3390/a11070104
Chicago/Turabian StyleGribanov, Igor, Rocky Taylor, and Robert Sarracino. 2018. "The Gradient and the Hessian of the Distance between Point and Triangle in 3D" Algorithms 11, no. 7: 104. https://doi.org/10.3390/a11070104
APA StyleGribanov, I., Taylor, R., & Sarracino, R. (2018). The Gradient and the Hessian of the Distance between Point and Triangle in 3D. Algorithms, 11(7), 104. https://doi.org/10.3390/a11070104