Abstract
Spectrum sensing is the prerequisite of the realization of cognitive radio. So it is a significant part of cognitive radio. In order to stimulate the SUs to sense the spectrum, we combine the incentive mechanism of crowd-sensing with cooperative spectrum sensing effectively, and put forward a crowd cooperative spectrum sensing algorithm with optimal utility of secondary users (SUs) under non-ideal channel which we define SUs’ utility expectation functions related to rewards, sensing time and transmission power. Then, we construct the optimization problem of maximizing the utilities of SUs by optimizing the sensing time and the transmission power, and prove that this problem is a convex optimization problem. The optimal sensing time and transmission power are obtained by using the Karush-Kuhn-Tucker (KKT) conditions. The numerical simulation results show that the spectrum detection performance of algorithm, which we put forward, is improved.
1. Introduction
In recent years, mobile data services have developed rapidly, and the demand for wireless spectrum resources is growing. Therefore, the technology of cognitive radio was invented. Spectrum sensing, which is an important part of cognitive radio, is aimed to sense whether the primary user (PU) occupies a specific frequency spectrum resource at a specific time in a particular location. Because of the existence of path loss and shadow effect, there is a large error in single detection problem. Cooperative spectrum sensing can solve this problem [1].
There are five hard-decision fusion methods for cooperative spectrum sensing, including “and” fusion, “or” fusion, voting fusion, maximum posterior probability fusion and Bayesian fusion [2]. Soft-data fusion schemes like square law selection fusion, maximal ratio combination fusion, square law combining fusion and selection combining are analyzed in [3]. The selection of SUs will influence the performance of spectrum sensing. In [4], SUs are selected by the size of the signal-to-noise ratio. SUs need to send the signal-to-noise ratio to base station for selecting, but it will increase the data overhead of the SUs. The dynamic selection of SUs in sensing system is studied, and a distributed sensing compensation method is put forward to solve the problem in [5]. Game theory is also applied to spectrum sensing, and the rewards of SUs are related to the reporting results. SUs will get higher rewards if their results are correct, otherwise, they will get lower rewards [6]. Because the communication between SUs and base station mostly adopts wireless communication, there must be error codes and packet loss. In [7], this phenomenon is analyzed, and the accuracy of data fusion is also calculated. All the papers above assume that the SUs are willing to participate in the sensing. In [8,9], reputation mechanism is considered in the cooperative spectrum sensing. While the smartphones have been popular, the robust spectrum sensing and cloud-based architecture has been studied, [10,11,12]. The spectrum assignment methods are also studied in [13,14,15]. In [16], how the selection of SUs can influence the performance of spectrum sensing is analyzed. However, because the SUs will not take part in the sensing without some rewards, a certain mechanism is needed to stimulate the SUs.
Crowd sensing is a method of collecting samples, and the main way is to collect samples by using intelligent equipment. Crowd sensing incentive mechanism is a mechanism for recruiting and stimulating the people involved in sensing. This mechanism can be divided into monetary incentive mechanism and non-monetary incentive mechanism [17]. At present, most of the research is monetary incentive mechanism. In [18], the game theory is applied to crowd sensing incentive mechanism, and the economic model of crowd sensing application is studied to improve the quality of sensing data. In [19], the task assignment problem of sensitive service quality is studied, the rewards of participants are related to the quality of sensing data. To ensure that the tasks are completed, each task can be completed by more than one participant. In order to reduce the social cost, a task participant cooperation mechanism is designed [20]. Participants in this mechanism are interrelated, so it is easy for participants to cooperate, and the sensing cost can be reduced. However, the above literatures do not concretely translate the crowd sensing into some applications.
In cognitive radio network, the SUs need to sense the spectrum to judge whether the primary user (PU) occupies a specific frequency spectrum resource. In order to stimulate the SUs to take part in the cooperative spectrum sensing, we need to combine the crowd sensing incentive mechanism with the cooperative spectrum sensing. The contributions of this paper are summarized as follows:
- (1)
- Under non-ideal channel, we propose a system model which combines crowd sensing incentive mechanism with cooperative spectrum sensing, and define SU’s utility expectation function which considers the SUs’ sensing time and transmission power at the same time.
- (2)
- We construct an optimization problem about the SU’s utility expectation, and prove that the optimization problem is a convex optimization problem. We obtained the optimal solution by using KKT conditions.
This paper is organized as follows. In Section 2, we introduce the system model. In Section 3, we propose a cooperative spectrum-sensing algorithm based on crowd sensing incentive mechanism under non-ideal channel with the optimal SUs’ utilities. The numerical simulation results and comparisons are given in Section 4, and finally, we draw the conclusions in Section 5.
2. System Model
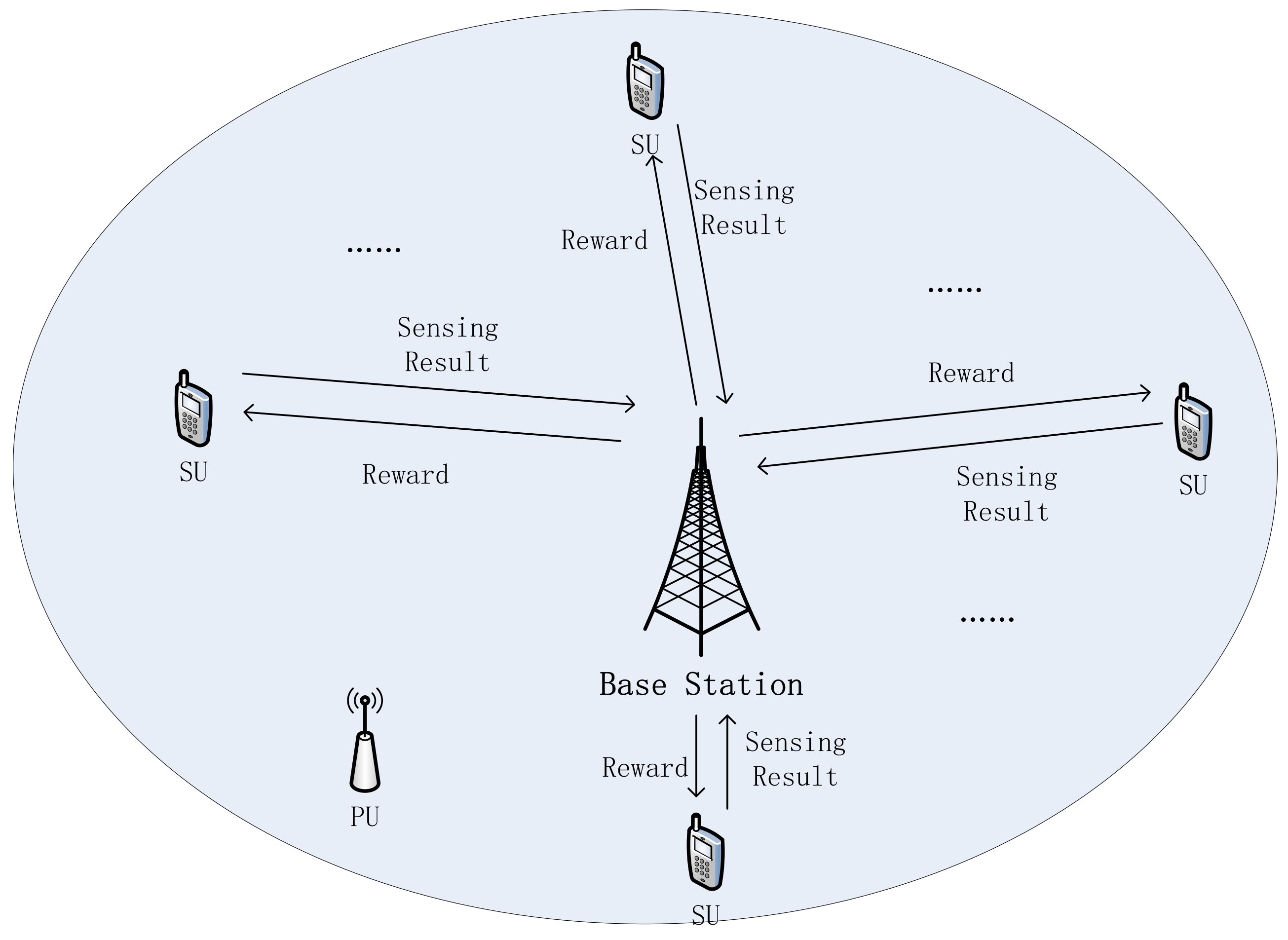
The system model is shown in Figure 1. M SUs are evenly distributed within the coverage of base station. The base station releases the channel to be sensed and reward information. After SUs finish the sensing, they send the sensing results to the base station, and the base station fuse all the results.
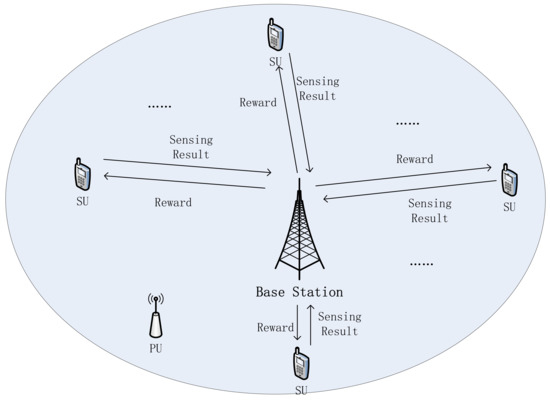
Figure 1.
System scenario.
SUs use energy detection for spectrum sensing. The detection probability of SU is given by [21]:
where is the target probability of false alarm, and represents the signal-to-noise ratio of SU . indicates the sensing time. indicates the sampling points, and it can be written as . The sampling frequency is a constant value. Function Q is expressed as:
Take as the probability of the existence of the PU, and take as the probability that the PU does not exist. So the correct sensing probability of SU , , and the incorrect sensing probability of SU , , are given by:
If the PU exist, the sensing result is 1, otherwise, the result is 0. When SUs sends the results of sensing to the base station, error codes will occur. So the correct probability of the results which is received by the base station from SU is given by:
and the incorrect probability is given by:
where is the transmission error rate. Assuming that SUs use 2DPSK modulation, the error rate of the receiver using non-coherent demodulation is [22], where indicates the signal-to-noise ratio of SUs signals received by base station.
In this paper, we adopt voting fusion method for data fusion. First set a threshold . A hypothesis will be true if more than SUs support this hypothesis. The detection probability and false alarm probability of voting fusion is expressed by:
where indicates the sensing result of SU . When threshold , the performance of fusion is optimum [21].
3. Utility Optimal Algorithm
The base station first releases information about the channel to be sensed, the correct reward and incorrect reward for the SUs. The SUs optimize the sensing time and signal transmission power to obtain the optimal utility expectation of the SUs according to the utility expectation formula. If the utility expectation is greater than 0, the SU would execute the sensing and send its sensing result to the base station. After the data fusion, the base station will offer the rewards to SUs in accordance with the correctness of the decision received, if the result of SU is the same with the result of the fusion decision, SU can get the correct reward , otherwise the reward is . The reward expectation of SU is given by:
The utility expectation of SU can be expressed by:
where indicates the signal transmission power of SU . and represent the cost of unit sensing time and the cost of unit transmission power, respectively.
In order to improve the efficiency of spectrum sensing, a SU will not take part in the spectrum sensing if the detection probability is less than 0.5, because the sensing result does not have reference value. Hence a SU will take part in the spectrum sensing when the detection probability is greater than 0.5. It is known from the properties of Q function that if the detection probability is greater than 0.5, the argument of the Q function in (2) is less than 0, i.e.,
The goal of this paper is that the SU can obtain the optimal utilities by optimizing the sensing time and the transmission power, and the optimization problem can be expressed as follows:
where the constraint condition (13) is derived from (11), and (14) indicates that the transmission power of the SU is greater than 0.
As long as the optimization problem is proved to be a convex optimization problem, the optimal sensing time and transmission power can be obtained through the KKT conditions [23].
Proposition 1.
Optimization problem is a convex optimization problem.
The proof is given in Appendix A.
Set , and represents 2 constraints on convex optimization problem. We define the Lagrangian equation as follows:
Thus, the KKT condition for the convex optimization problem is given by:
According to (15), we can get . Hence (14) can be expressed by:
The optimal sensing time and emission power can be obtained by solving Equation (17).
In summary, the algorithm of crowd cooperative spectrum sensing is as follows (Algorithm 1):
| Algorithm 1 Crowd Cooperative Spectrum Sensing Algorithm under Non-Ideal Channel. |
| 1: for all SUs do |
| 2: Solve the Equations (17) and get the optimal sensing time and emission power ; |
| 3: Calculate the according to (10); |
| 4: if |
| 5: SU take part in the spectrum sensing and send the result to the base station; |
| 6: The base station receives the sensing result from SU ; |
| 7: end if |
| 8: end for |
| 9: The base station fuses the results from SUs and gets the fusion result ; |
| 10: for all SUs participating in the sensing do |
| 12: if = |
| 13: SU gets correct reward ; |
| 14: else |
| 15: SU gets incorrect reward ; |
| 16: end if |
| 17: end for |
4. Computer Simulations
In this paper, we simulate the correct detection probability and the SUs’ average utility with MATLAB R2012a, and compare the simulation results with the results of [4]. In the simulation scenario, 6 SUs are randomly distributed in the circle with a radius of 100 m. The coordinate of the PU is (0,0), and the base station’s coordinate is (200,200) m. The sampling frequency of the SU is set to 10 kHz. The sensing time cost is set to 0.1 per millisecond, and the transmission power cost is set to 0.01 per milliwatts. The incorrect reward is 1/10 of the correct reward , and the target false alarm probability of SUs is set to 0.1. The transmission of signal is based on the empirical path loss model in large scale fading, and the fading coefficient is 2.5. The transmission power of the primary user is 40 mW, and the program runs 3000 times to get the average values.
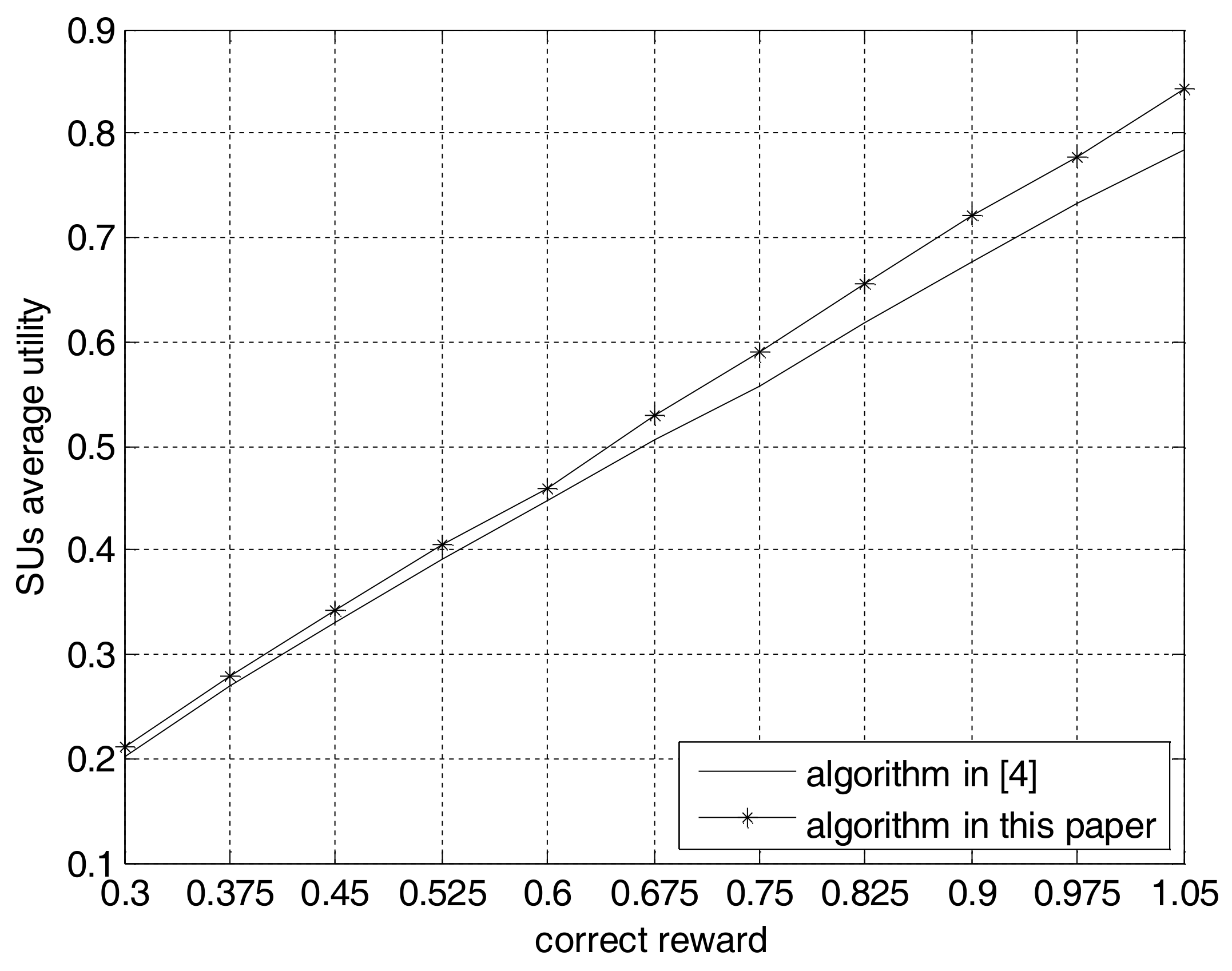
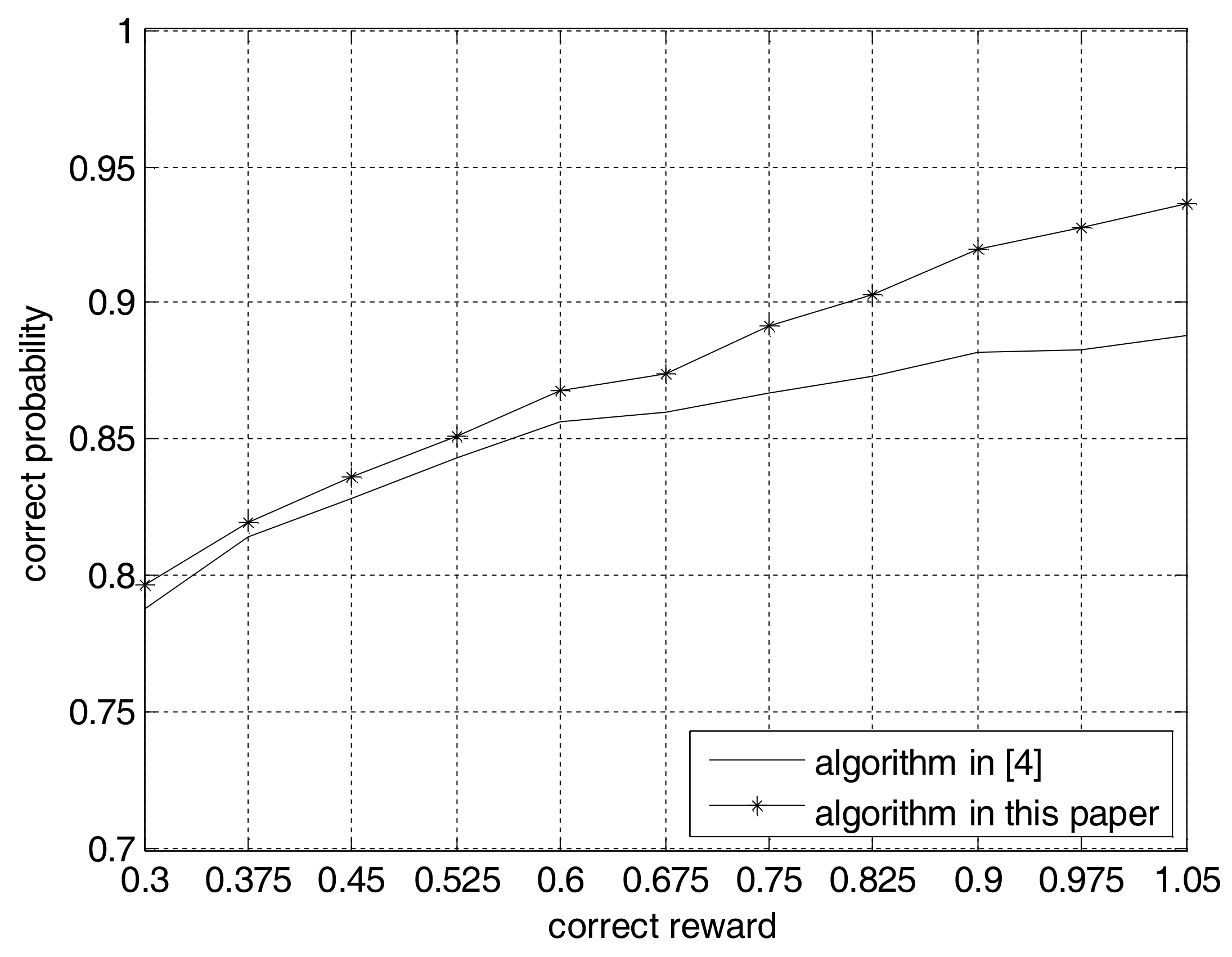
Figure 2 and Figure 3 show the changes in the average utility and correct sensing probability of SUs with the reward . In Figure 2, the SUs average utility of the algorithm increases with remuneration, and is greater than of the comparison algorithm. The reason is that this algorithm is a utility expectation optimal algorithm. By maximizing the sensing time and signal transmission power, the utilities expectation of the SUs get the maximum value. However, the contrast algorithm did not consider the SUs’ sensing time and transmission power, so the detective probability and error rate cannot be changed which means it can not get the optimal values. Therefore, the average utility of the SUs is greater than the contrast algorithm. From Figure 3, it can be seen that the correct probability of sensing is also increasing with the reward, and the correct probability of this algorithm is higher than that of the contrast algorithm. The reason is that with the increase of the reward, the number of people involved in sensing will increase, which can improve the correct probability. Because the average utility of this algorithm is greater than the contrast algorithm, the number of people involved in the sensing will be more than the contrast algorithm, so the correct probability is higher than the contrast algorithm.
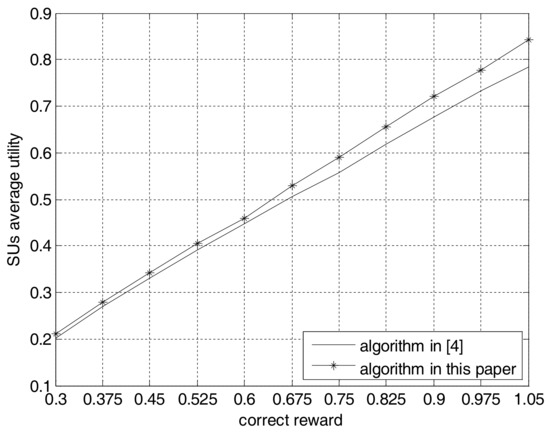
Figure 2.
The change of the SUs average utility with the correct reward.
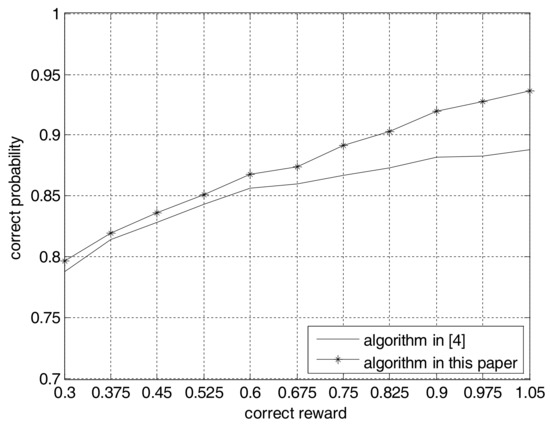
Figure 3.
The change of the correct probability with the correct reward.
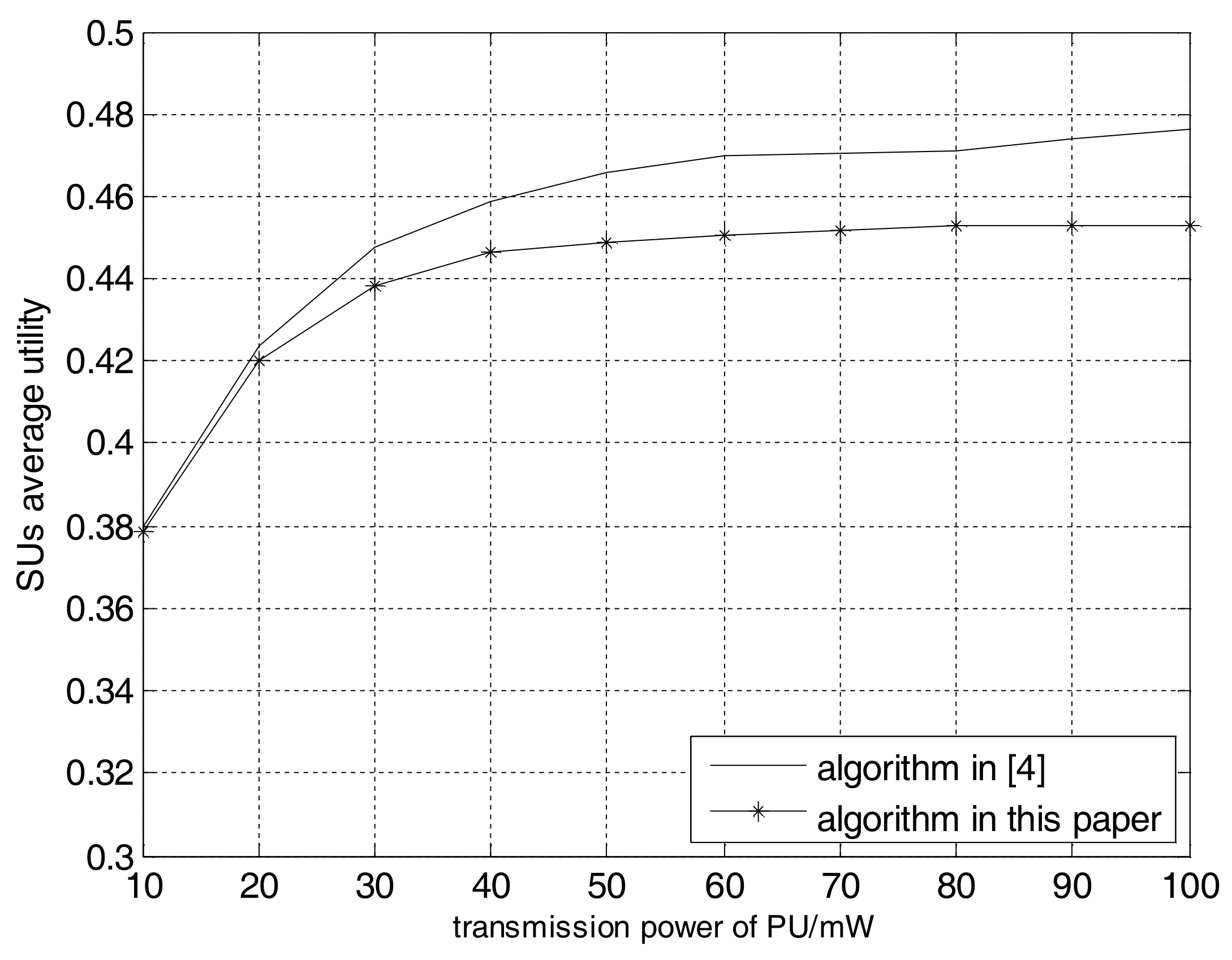
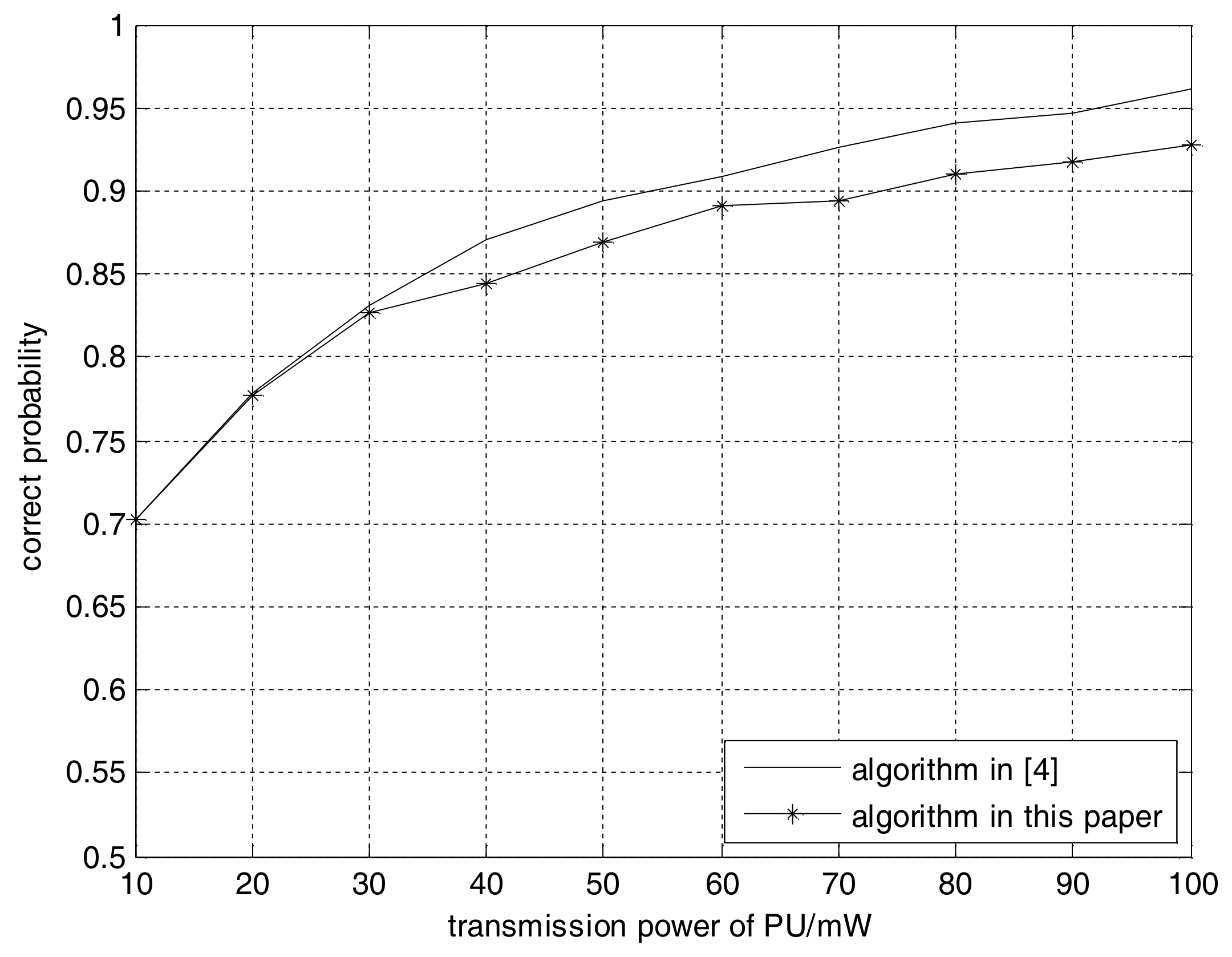
Figure 4 and Figure 5 represent the changes in the average utility and correct probability of the SUs with the transmission power of the PU, and the reward is set to 0.6. In Figure 4, the two curves are beginning to grow more clearly, and then more slowly. The reason is that when the transmission power of the PU is low, the SUs’ acceptance of signal-to-noise ratio is low, the detection error is large, so the utilities are low. With the promotion of the power of the PU, the accuracy of the SUs is improved, so the utilities of the SUs are also improved. Because the reward is constant, when the detection probabilities increase, the utilities of the SUs are close to the maximum utility that can be obtained, so the curves are relatively gentle behind. In can be seen from Figure 4 that the secondary user’s average utility of this algorithm is greater than that of the contract algorithm. The reason is that this algorithm is a utility expectation optimal algorithm. By maximizing the sensing time and signal transmission power, we can get the maximum utility expectations of the SUs, so the average utility of the SUs is higher than that of the contrast algorithm. From Figure 5, we can see that two curves increase monotonously with the transmission power of the primary users. The correct probability of the algorithm is greater than that of the contrast algorithm. The reason is that the secondary user utility of the algorithm is higher than that of the contrast algorithm, so the number of participants is more, and the probability of correctness is higher.
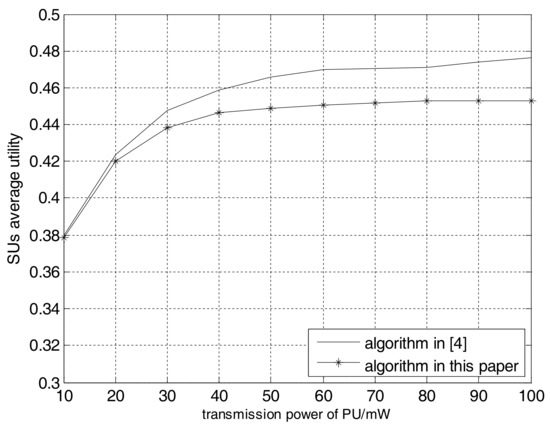
Figure 4.
The change of the SUs average utility with the transmission power of PU.
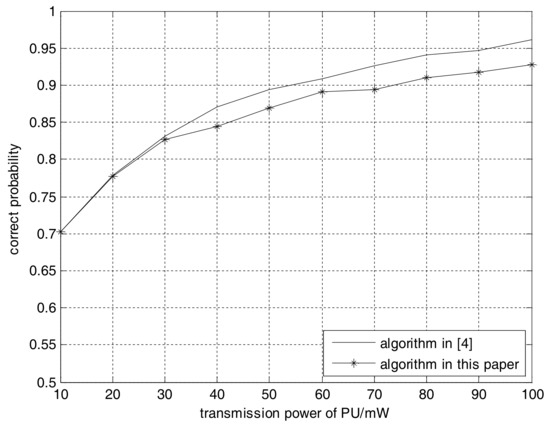
Figure 5.
The change of the correct probability with the transmission of PU.
5. Conclusions
We apply the crowd sensing incentive mechanism to cooperative spectrum sensing under non-ideal channel, and propose a cooperative spectrum sensing algorithm based on crowd sensing incentive mechanism under non-ideal channel with the optimal SUs’ utilities. First, the utility expectation function of the SUs is set up, and the maximum utility expectation is obtained by optimizing the sensing time and signal transmission power. The base station compares the received SUs judgment results with the fusion decision results, if the same, the secondary users can get a higher reward, otherwise the reward is low, so as to stimulate the SUs’ sensing initiative and the performance of spectrum sensing is improved. Finally, the simulation shows that while the utility of the SU is getting the optimal value, the accuracy of spectrum sensing is also improved. The key insight of our algorithm is that spectrum sensing and crowd sensing incentive mechanism can be combined to stimulate the SUs and improve the sensing performance.
Acknowledgments
This work is supported by National Natural Science Foundation of China (61571234, 61631020).
Author Contributions
The manuscript was written by Xinxin Lv under the guidance of Qi Zhu. All authors reviewed the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Proof for Proposition 1: It is obvious that the feasible domain of the optimization problem is a convex set, and then we prove that the objective function is a convex function.
The necessary and sufficient condition for a function to be a convex function is that the Laplasse operator is not less than 0 [23], i.e.,
For the sake of simplicity, without losing the generality, we set , i.e., the probability of the existence of the main user is 0.5. (10) can be simplified as follows:
So the Laplasse operator of the objective function can be expressed as follows:
First calculate , and we can get:
where
Because the signal-to-noise ratio is positive and therefore . Because , so , i.e., . So
According to the definition and (5), we can get and . So
Then calculate , and we can get:
where indicates noise power, and indicates path loss. Set target false alarm probability less than 0.5. Because , we can get:
Thus, we can get:
Hence objective function is a convex function. Optimization problem is a convex optimization problem. Proof complete.
References
- Mishra, S.M.; Sahai, A.; Brodersen, R.W. Cooperative Sensing among Cognitive Radios. In Proceedings of the IEEE International Conference on Communications, Istanbul, Turkey, 11–15 June 2006; IEEE: New York, NY, USA, 2006; pp. 1658–1663. [Google Scholar]
- Li, B.; Qi, Z. Cooperative Spectrum Sensing Algorithm Based on Data Fusion. J. NJUPT 2009, 29, 73–78. [Google Scholar] [CrossRef]
- Nallagonda, S.; Kumar, Y.R.; Shilpa, P. Analysis of Hard-Decision and Soft-Data Fusion Schemes for Cooperative Spectrum Sensing in Rayleigh Fading Channel. In Proceedings of the Advance Computing Conference, Istanbul, Turkey, 11–15 June 2006; IEEE: New York, NY, USA, 2017; pp. 220–225. [Google Scholar]
- Ma, Y.; Gao, Y.; Zhang, X.; Cuthbert, L. Optimization of collaborating secondary users in a cooperative sensing under noise uncertainty. In Proceedings of the IEEE International Symposium on Personal Indoor and Mobile Radio Communications, London, UK, 8–11 September 2013; IEEE: New York, NY, USA, 2013; pp. 2502–2506. [Google Scholar]
- Zhang, Y.; Xu, Y.; Wu, Q.; Feng, S.; Anpalagan, A. Near Optimal Distributed Cooperative Spectrum Sensing and Access: A Benefit-and-Compensation Approach. In Proceedings of the IEEE Vehicular Technology Conference, Toronto, ON, Canada, 24–27 September 2017; IEEE: New York, NY, USA, 2017; pp. 1–7. [Google Scholar]
- Chen, B.; Zhang, B.; Yu, J.L.; Zhu, H. An indirect reciprocity based incentive framework for cooperative spectrum sensing. In Proceedings of the IEEE International Conference on Communications, Paris, France, 21–25 May 2017; IEEE: New York, NY, USA, 2017; pp. 1–6. [Google Scholar]
- Zhu, R.; Zhang, X.; Liu, X.; Shu, W.; Mao, T.; Jalaian, B. ERDT: Energy-Efficient Reliable Decision Transmission for Intelligent Cooperative Spectrum Sensing in Industrial IoT. IEEE Access 2015, 3, 2366–2378. [Google Scholar] [CrossRef]
- Benedetto, F.; Giunta, G. A Theoretical Analysis of Asymptotical Performance of Cooperative Spectrum Sensing in the Presence of Malicious Users. IEEE Wirel. Commun. Lett. 2017, 99. [Google Scholar] [CrossRef]
- Benedetto, F.; Tedeschi, A.; Giunta, G.; Coronas, P. Performance improvements of reputation-based cooperative spectrum sensing. In Proceedings of the International Symposium on Personal, Indoor, and Mobile Radio Communications, Valencia, Spain, 4–8 September 2016; IEEE: New York, NY, USA, 2016; pp. 1–6. [Google Scholar]
- Ding, G.; Song, F.; Wu, Q.; Zou, Y.; Zhang, L.; Feng, S.; Yao, Y.-D. Robust Spectrum Sensing with Crowd Sensors. IEEE Trans. Commun. 2014, 9, 3129–3143. [Google Scholar] [CrossRef]
- Wu, Q.; Ding, G.; Du, Z.; Sun, Y.; Jo, M.; Vasilakos, A.V. A Cloud-Based Architecture for the Internet of Spectrum Devices over Future Wireless Networks. IEEE Access 2017, 4, 2854–2862. [Google Scholar] [CrossRef]
- Ding, G.; Wang, J.; Wu, Q.; Yao, Y.D.; Song, F.; Tsiftsis, T.A. Cellular-base-station-assisted device-to-device communications in tv white space. IEEE J. Sel. Areas Commun. 2015, 34, 107–121. [Google Scholar] [CrossRef]
- Ser, J.D.; Alonso, A.; Gil-Lopez, S.; Garay, M. On the design of an heuristically optimized multiband spectrum sensing approach for cognitive radio systems. In Proceedings of the 2012 IEEE 17th International Workshop on Computer Aided Modeling and Design of Communication Links and Networks (CAMAD), Barcelona, Spain, 17–19 September 2012; pp. 168–169. [Google Scholar]
- Ser, J.D.; Matinmikko, M.; Gil-López, S.; Mustonen, M. Centralized and distributed spectrum channel assignment in cognitive wireless networks: A Harmony Search approach. Appl. Soft Comput. 2012, 12, 921–930. [Google Scholar] [CrossRef]
- Tragos, E.Z.; Zeadally, S.; Fragkiadakis, A.G.; Siris, V.A. Spectrum Assignment in Cognitive Radio Networks: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2013, 15, 1108–1135. [Google Scholar] [CrossRef]
- Sobron, I.; Martins, W.A.; de Campos, M.L.R.; Elez, M. Incumbent and LSA Licensee Classification through Distributed Cognitive Networks. IEEE Trans. Commun. 2016, 1, 94–103. [Google Scholar] [CrossRef]
- Jaimes, L.G.; Vergara-Laurens, I.J.; Raij, A. A Survey of Incentive Techniques for Mobile Crowd Sensing. IEEE Internet Things J. 2015, 2, 370–380. [Google Scholar] [CrossRef]
- Lee, J.S.; Hoh, B. Dynamic pricing incentive for participatory sensing. Pervasive Mob. Comput. 2010, 6, 693–708. [Google Scholar] [CrossRef]
- Hu, T.; Xiao, M.; Hu, C.; Gao, G.; Wang, B. A QoS-sensitive task assignment algorithm for mobile crowdsensing. Pervasive Mob. Comput. 2017. [Google Scholar] [CrossRef]
- Xu, J.; Rao, Z.; Xu, L.; Yang, D.; Li, T. Mobile Crowd Sensing via Online Communities: Incentive Mechanisms for Multiple Cooperative Tasks. In Proceedings of the IEEE International Conference on Mobile Ad Hoc and Sensor Systems, Orlando, FL, USA, 22–25 October 2017; IEEE: New York, NY, USA, 2017; pp. 171–179. [Google Scholar]
- Li, B. The Study of the Cooperative Spectrum Sensing Algorithm in Cognitive Radio based on Data Fusion; NJUPT: Nan Jing, China, 2010. [Google Scholar]
- Fan, C.; Cao, L. Principles of Communications, 7th ed.; National Defense Industry Press: Beijing, China, 2012; pp. 204–205. ISBN 978-7-118-08768-0. [Google Scholar]
- Stephen, B.; Lieven, V. Convex Optimization; Tsinghua University Press: Beijing, China, 2013; pp. 61–65. ISBN 978-7-302-29756-7. [Google Scholar]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).