According to parameters given in [
26],
a = 0.195 × 10
6 J/m
3,
B = 7.155 × 10
6 J/m
3,
C = 8.82 × 10
6 J/m
3,
L = 10.125 × 10
−12 J/m can be easily obtained. In our simulations, the scaled temperature is set to
, which corresponds to
. The rotational diffusion
D* is set to 0.35, which is the value used in [
26], and the dielectric anisotropy is set to Δε = 13.2 (ε
⊥ = 6.5). We then obtain the exact values ξ
0 = 2.64
nm and
E0 = 43.1
V/
um. We focus on the dependence of structure transition on thickness (
d) and then on the structure transition induced by electric field (
).
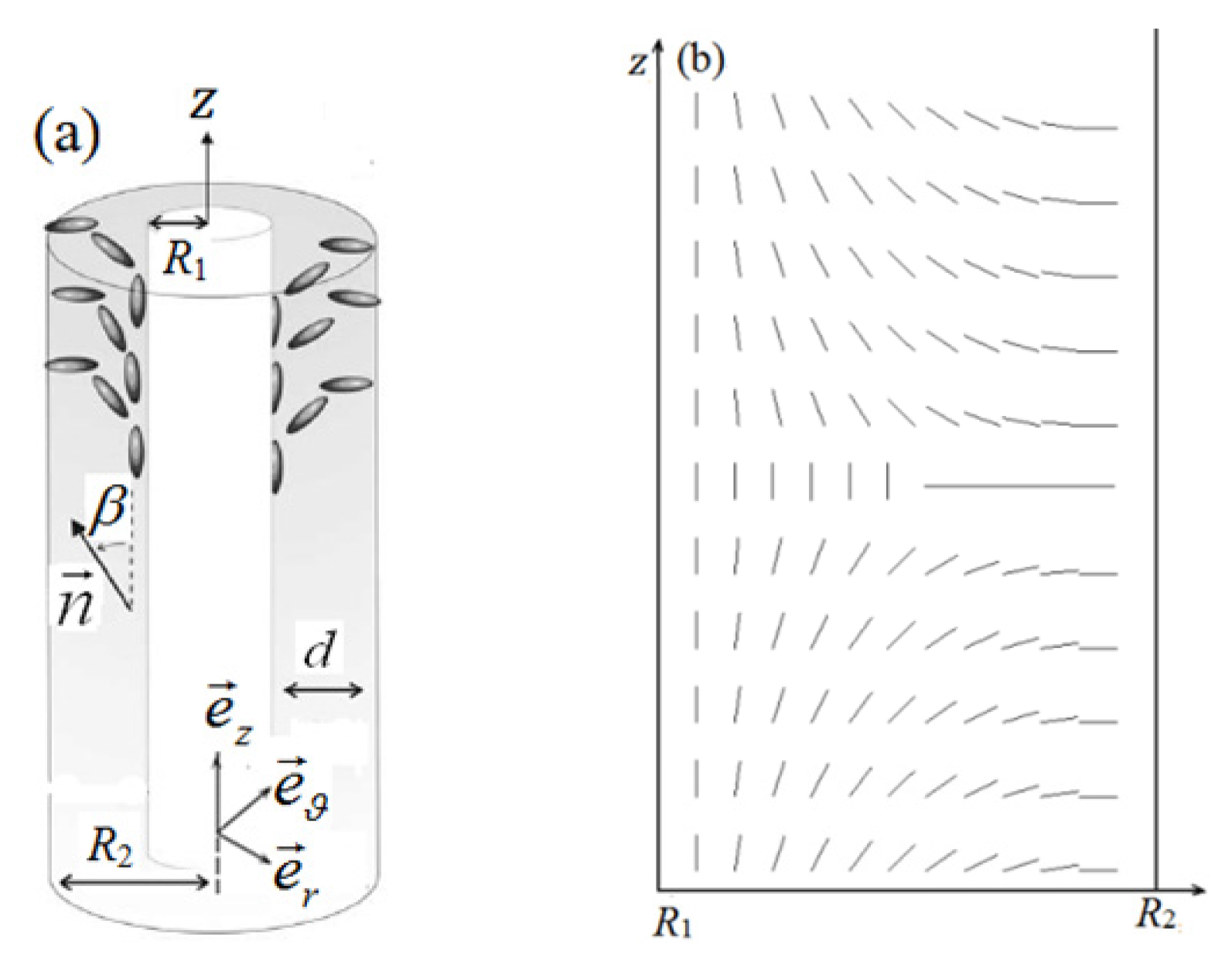
3.1. Structure Transition with Different Values of Thickness d and Internal Radius R1
We first analyze the equilibrium textures in the case of
R1 = 30 ξ
0 with different values of
d.
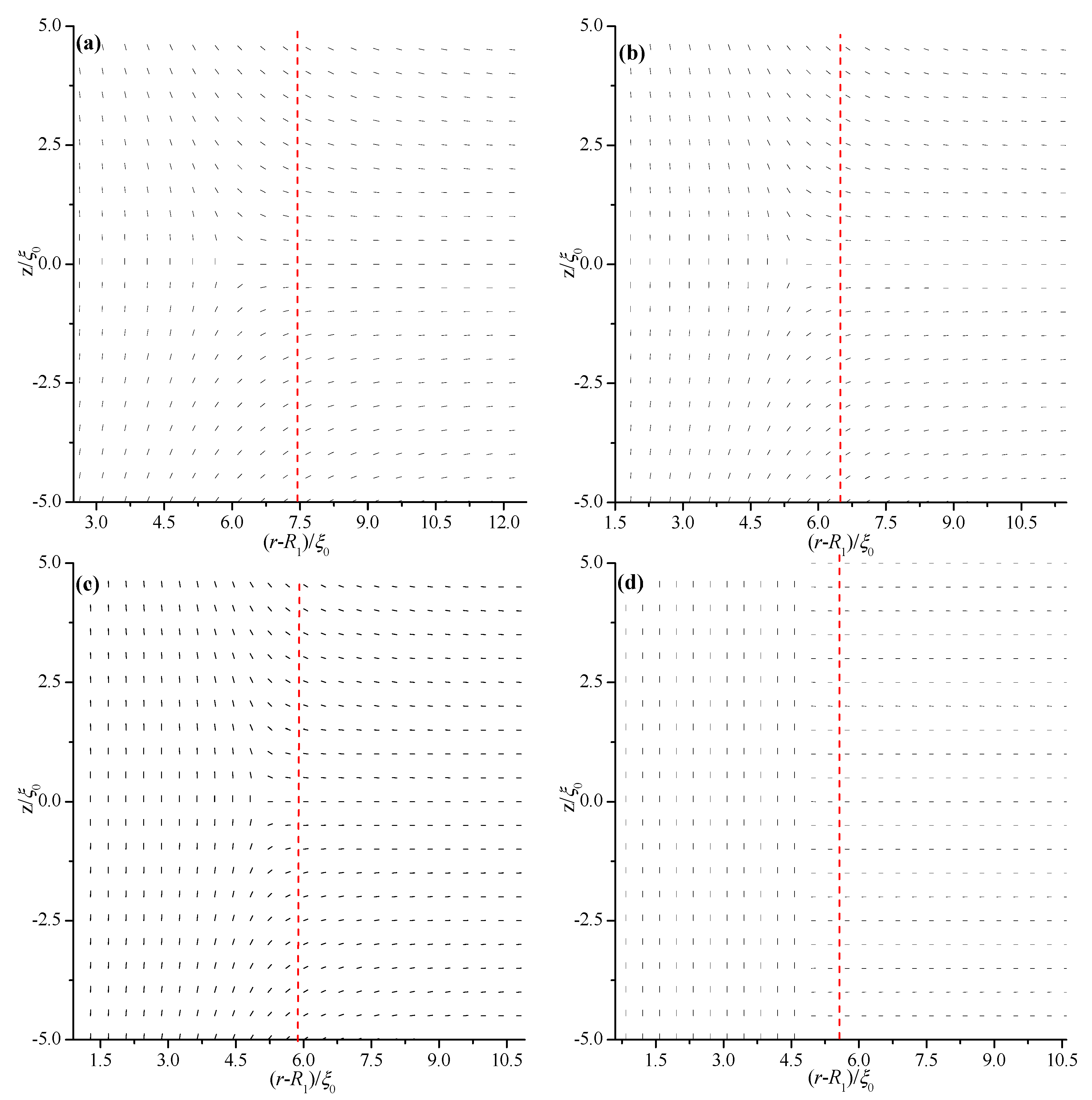
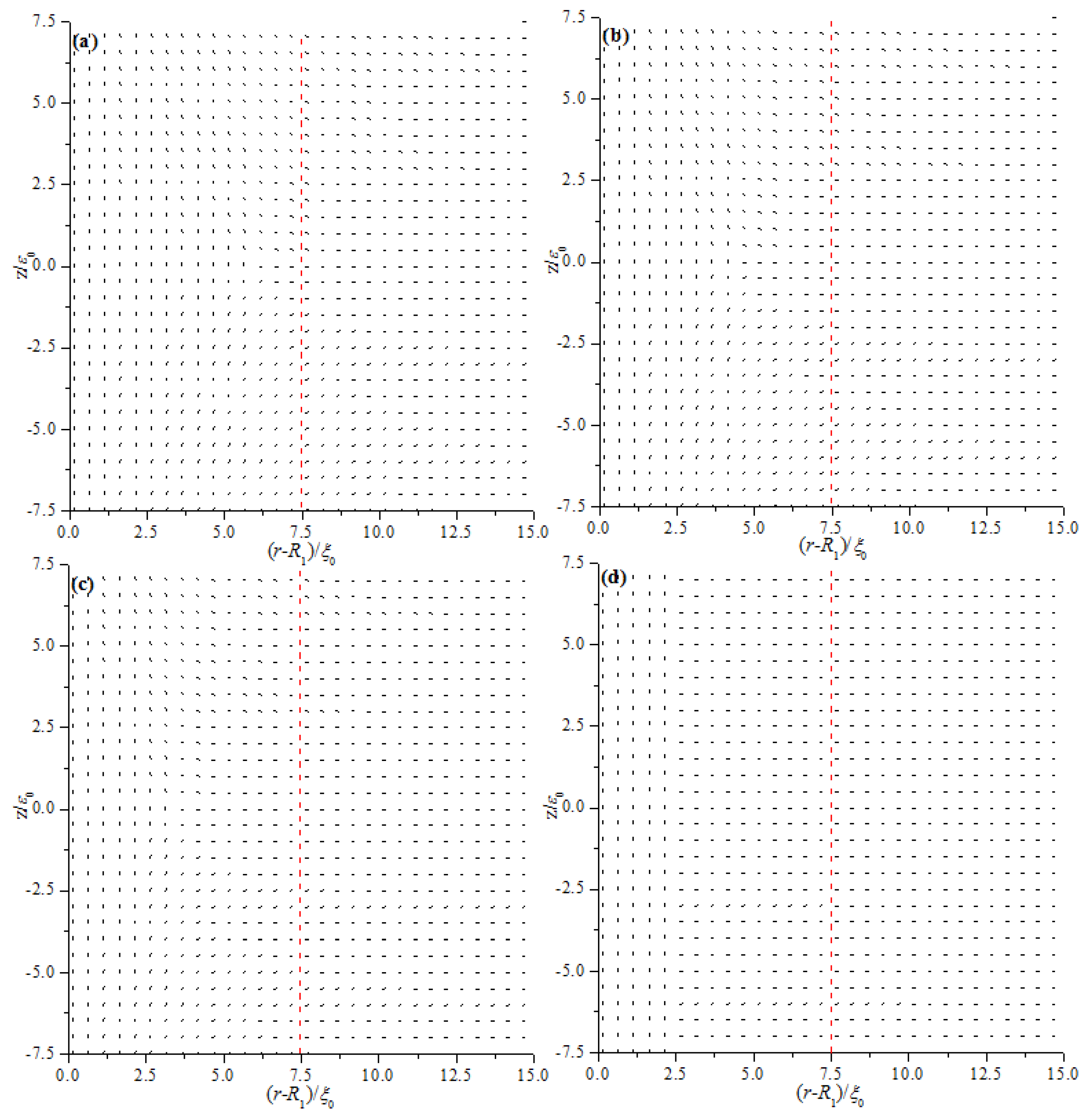
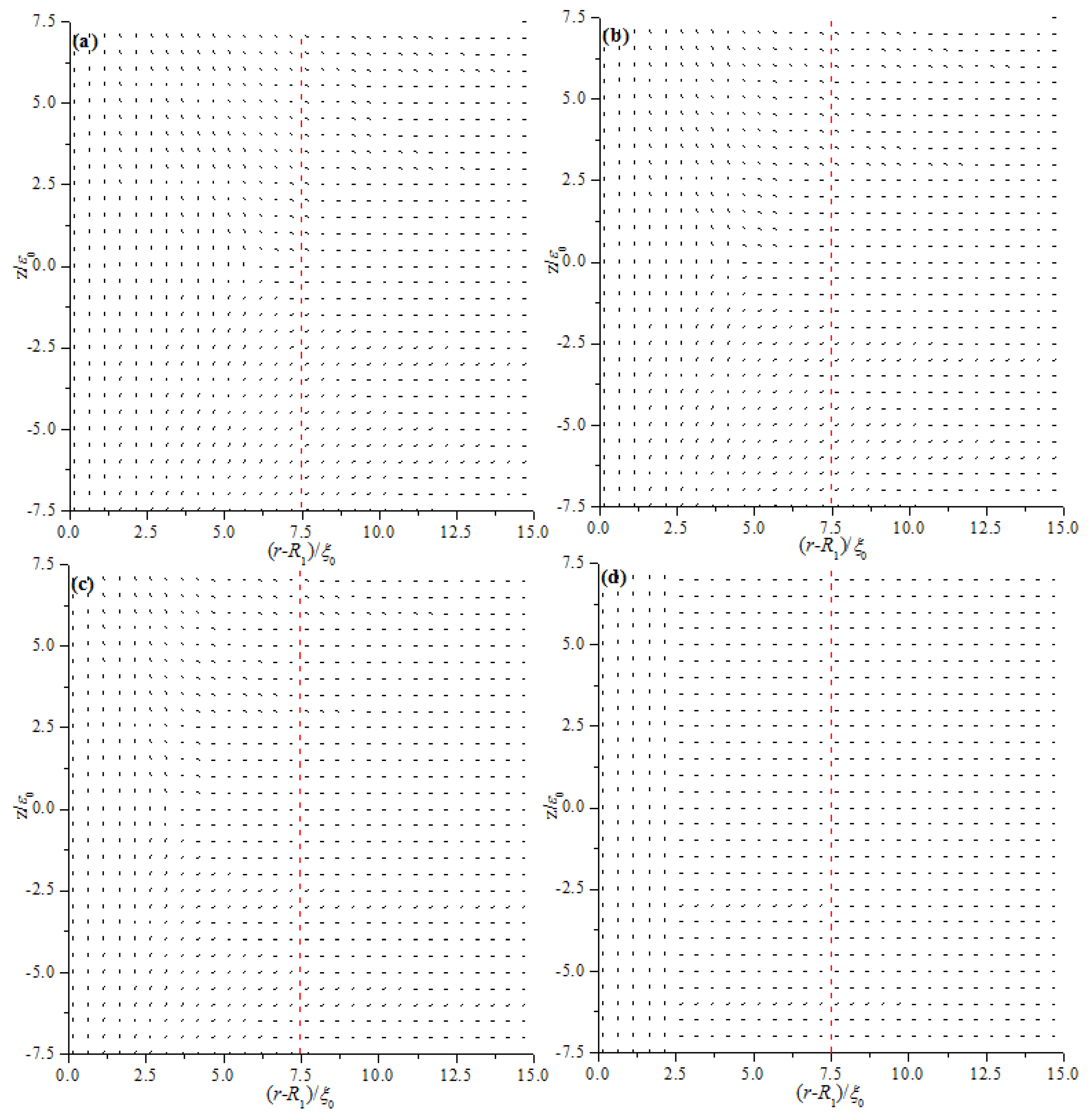
Figure 2 and
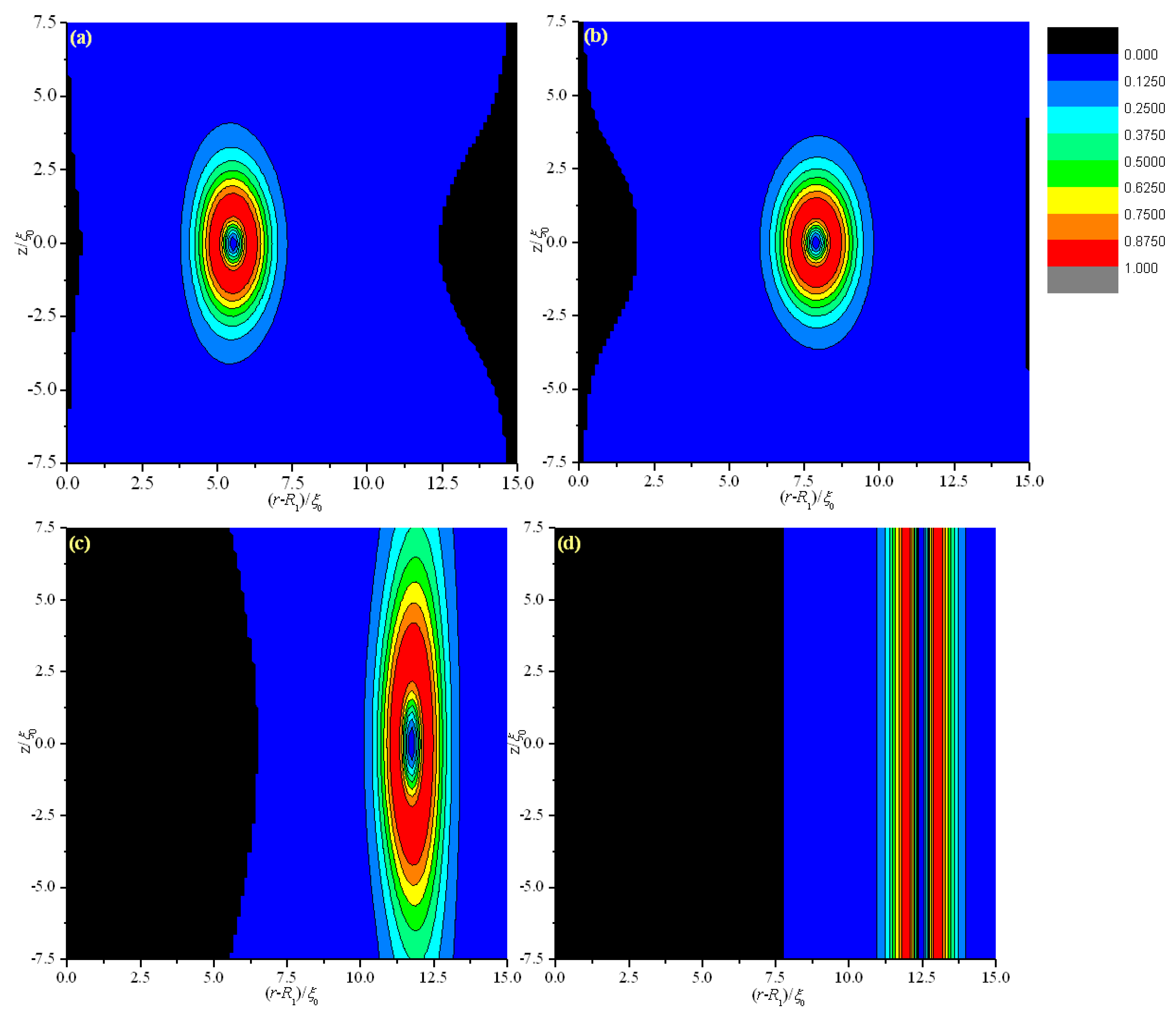
Figure 3 show the director field profile and the calculated biaxiality β
2 in a cross-section along an arbitrary azimuth for different values of
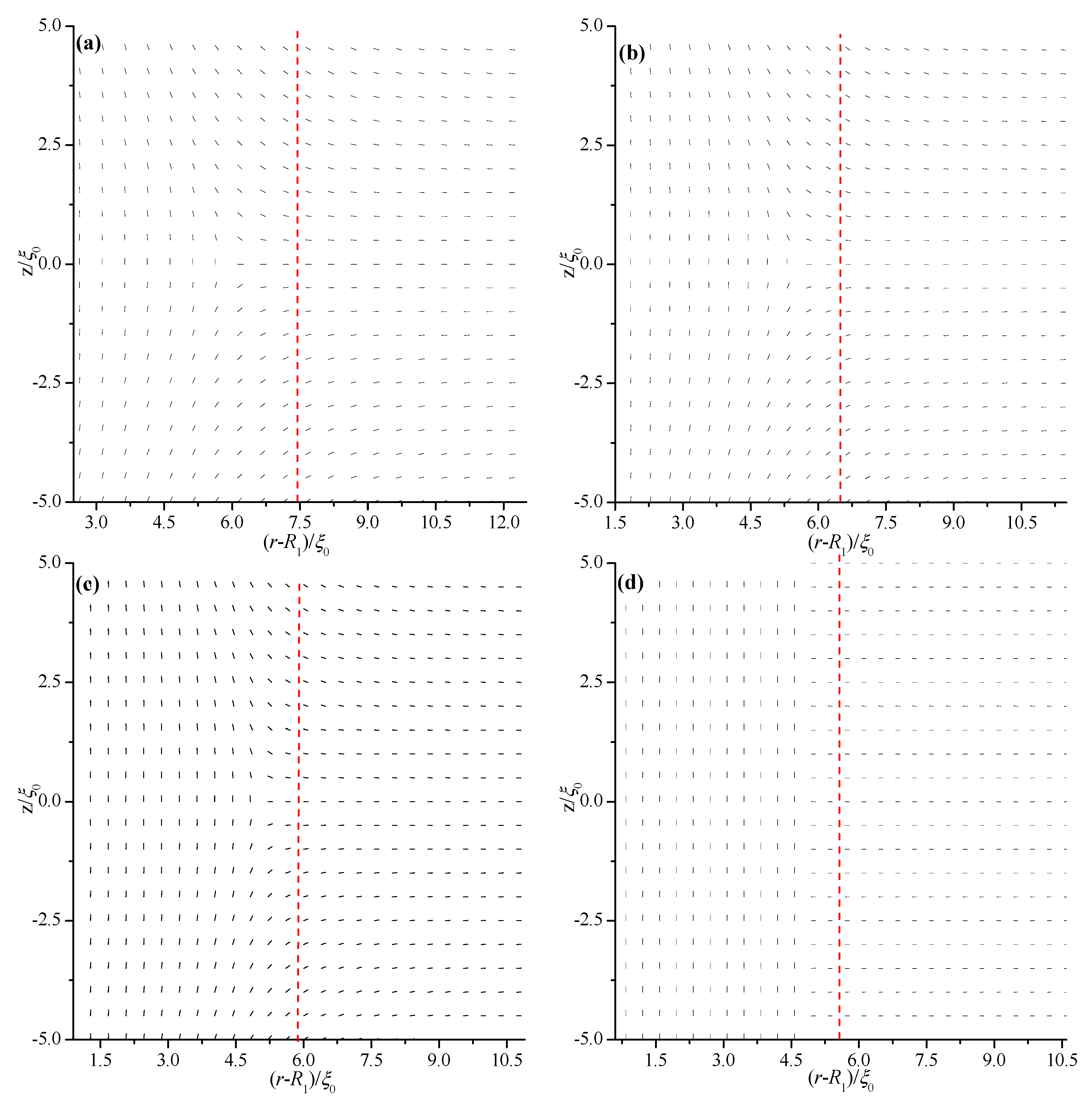
d. At relatively large thicknesses, the nematic system shows the defect core structure (
Figure 2a,b) and is uniaxial everywhere (β
2 = 0), except for a small region around the defect core (
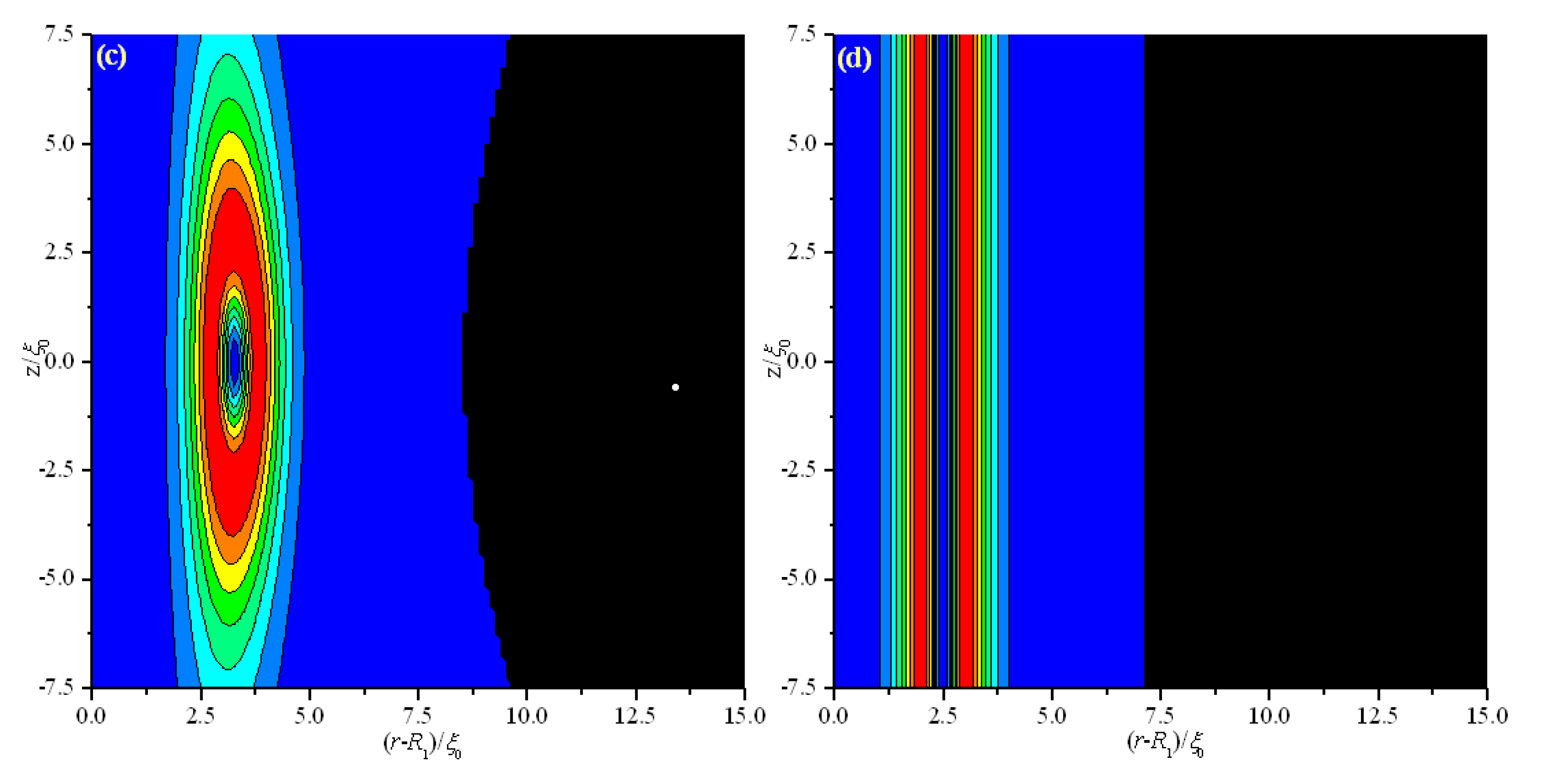
Figure 3a,b). When
d decreases, the defect core clearly explodes along
z (
Figure 2c), and a large biaxiality propagates along
z inside the system (
Figure 3c). Further decrease in
d results in the creation of a biaxial wall, which connects the two orthogonal uniaxial directions imposed by two cylindrical surfaces (
Figure 2d and
Figure 3d) at a critical value of
dc = 11.2 ξ
0. In summary, the system has transitioned from the eigenvector rotation configuration with a defect loop into the eigenvalue exchange/order reconstruction configuration by developing a thin biaxial nematic layer, which forms a cylindrical wall in the nematic system. The transition process is similar to that conducted in a planar cell in our previous studies [
24,
25].
Figure 2 and
Figure 3 show that the defect center is not located in the middle of the system but shifts to the internal surface; this phenomenon differs from the case of a planar cell [
24,
25]. Non-planar cylindrical geometry causes disclination loops to shrink, and the loop will not disappear under internal surface confinement [
27].
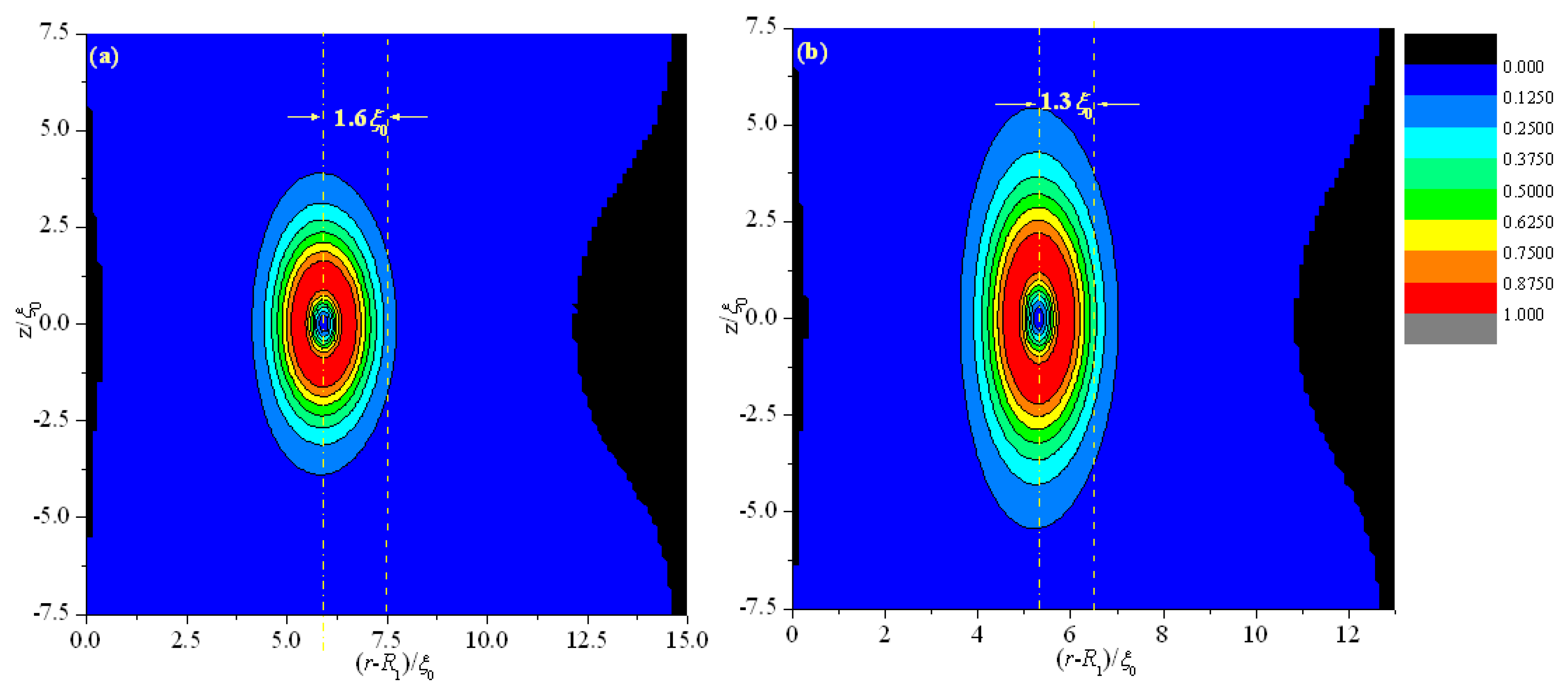
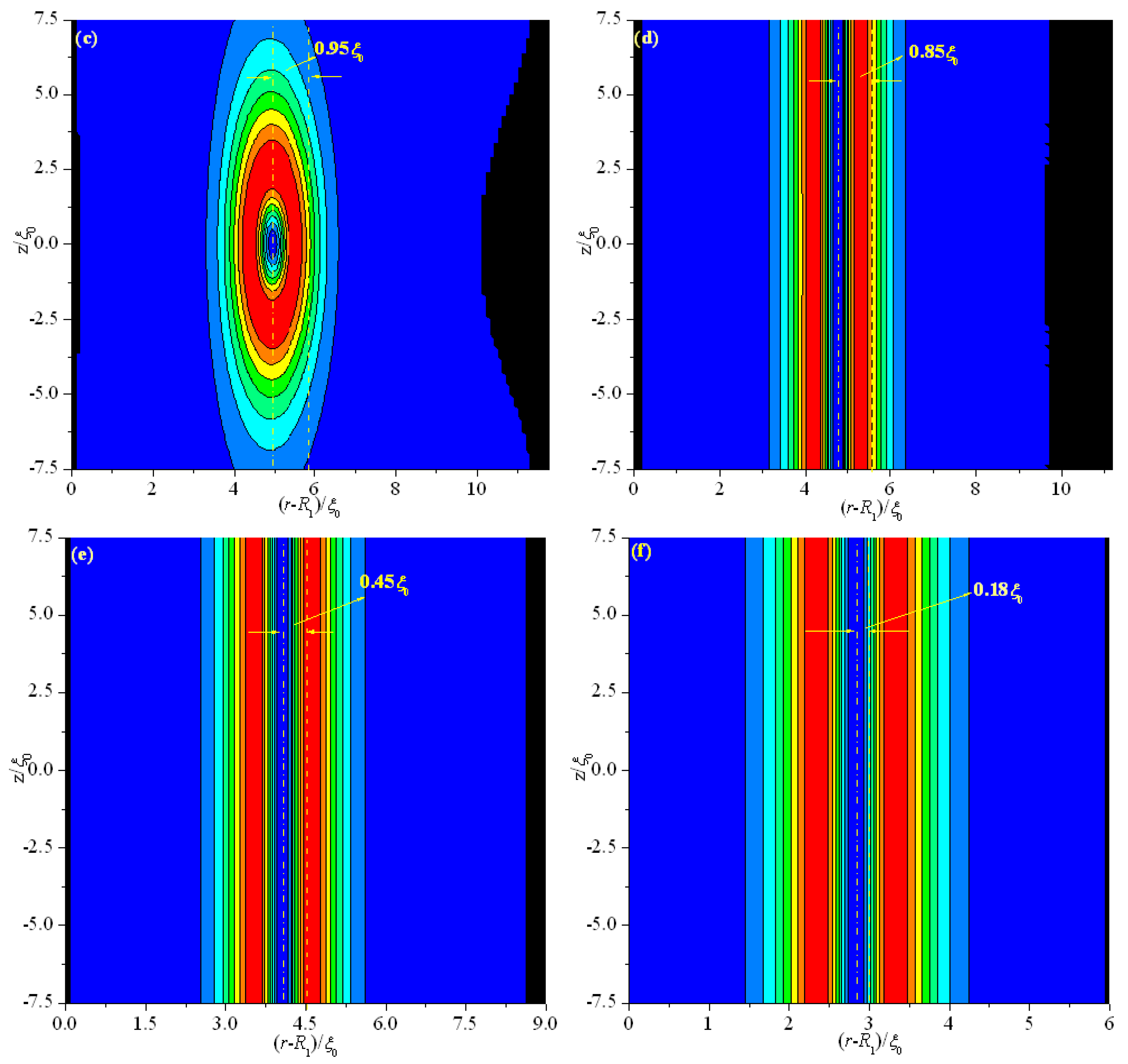
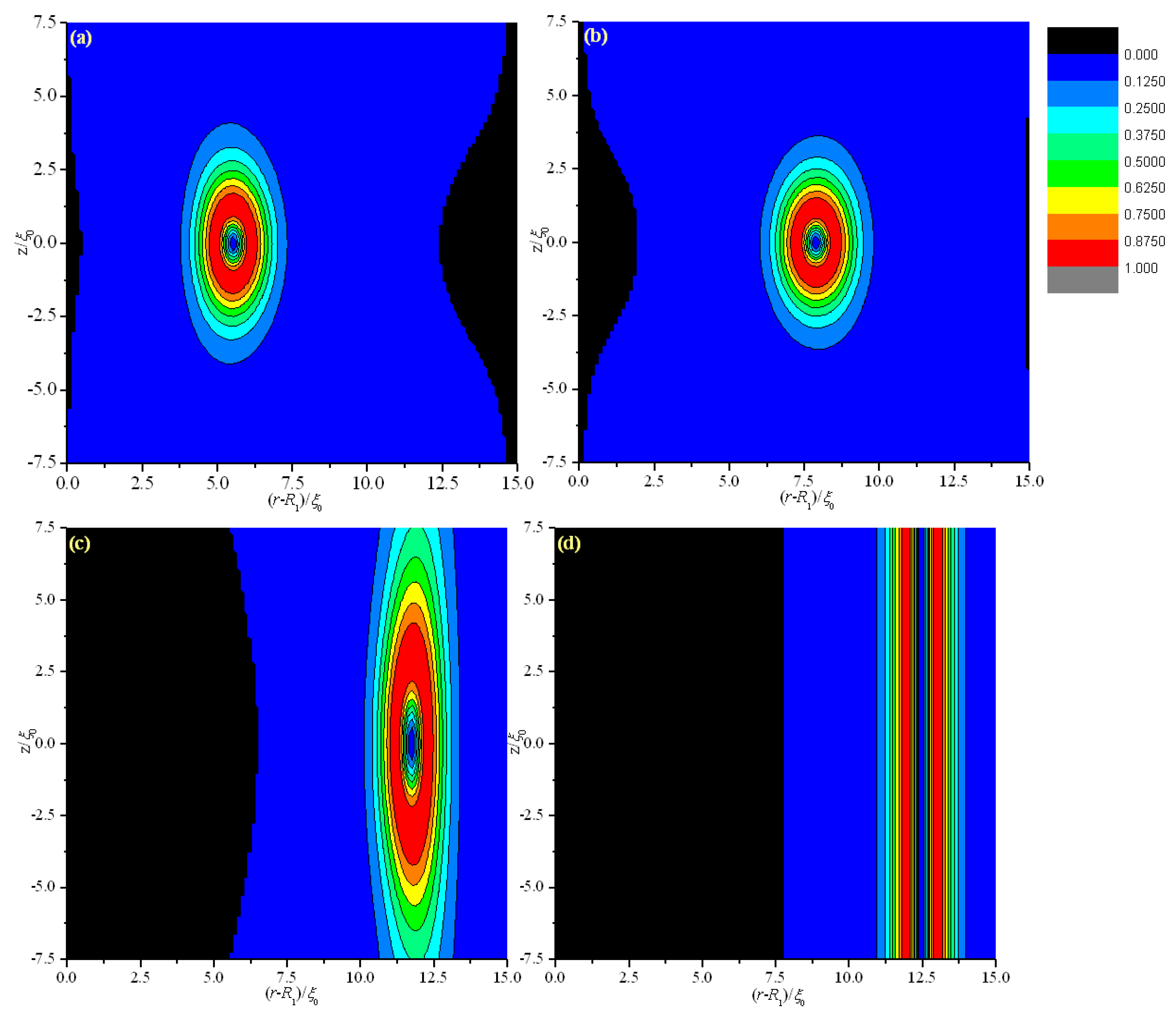
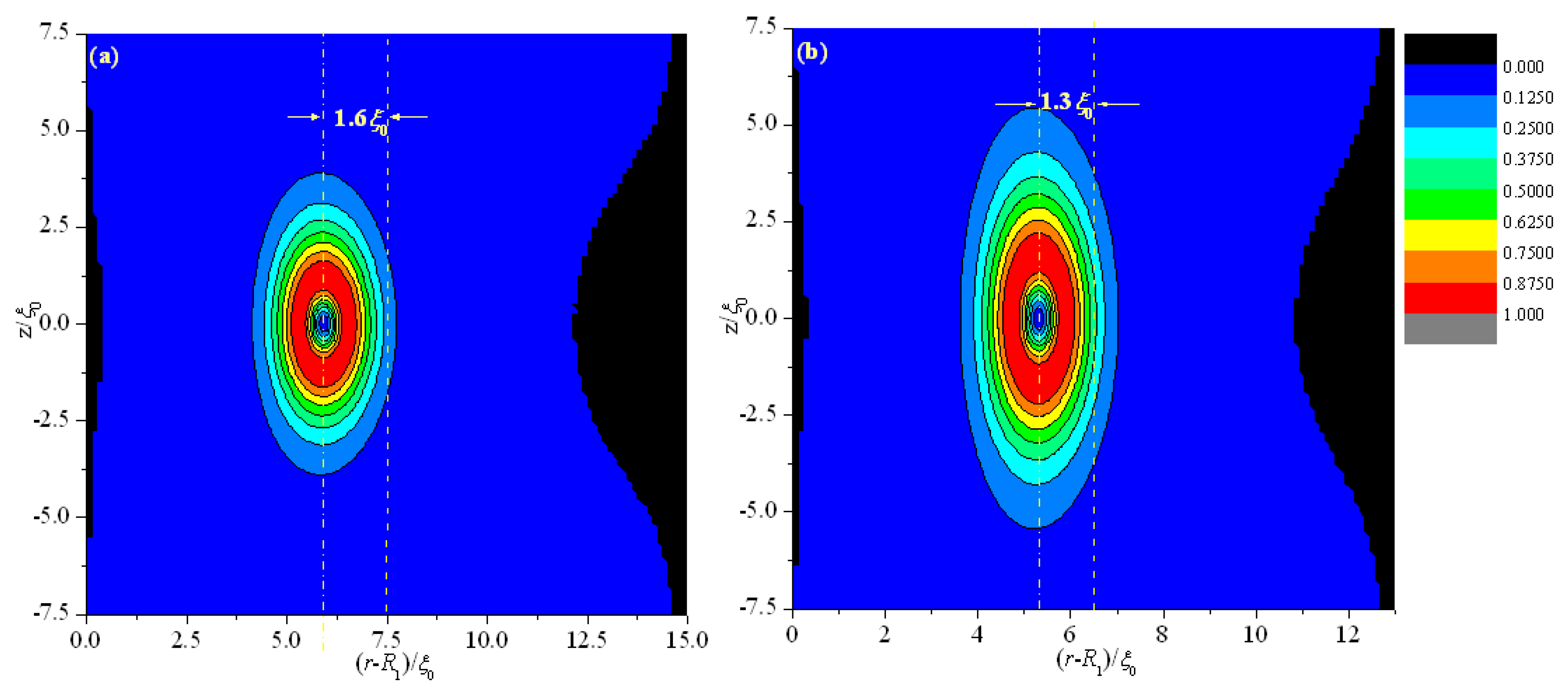
Figure 3 shows that the deviations Δ(
d) for different thicknesses (
d) are 1.6 ξ
0 (
d = 15 ξ
0), 1.3 ξ
0 (
d = 13 ξ
0), 0.95 ξ
0 (
d = 11.8 ξ
0), 0.85 ξ
0 (
d = 11.2 ξ
0), 0.45 ξ
0 (
d = 9 ξ
0), and 0.18 ξ
0 (
d = 6 ξ
0). These finding indicate that Δ(
d) decreases with decreasing
d, even after eigenvalue exchange (
Figure 3e,f). This behavior is due to the gradual transformation of the system to a planar structure with decreasing
d.
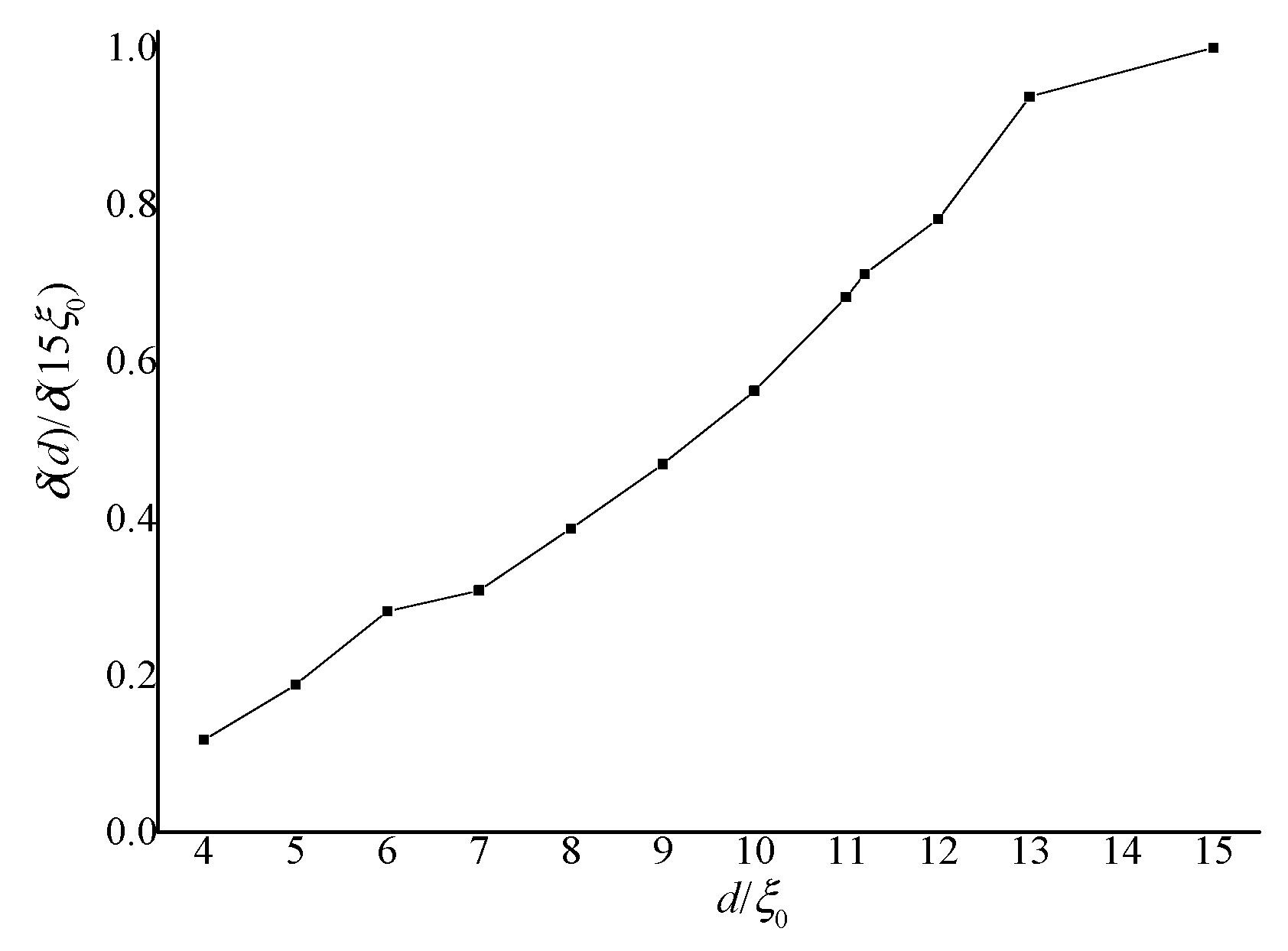
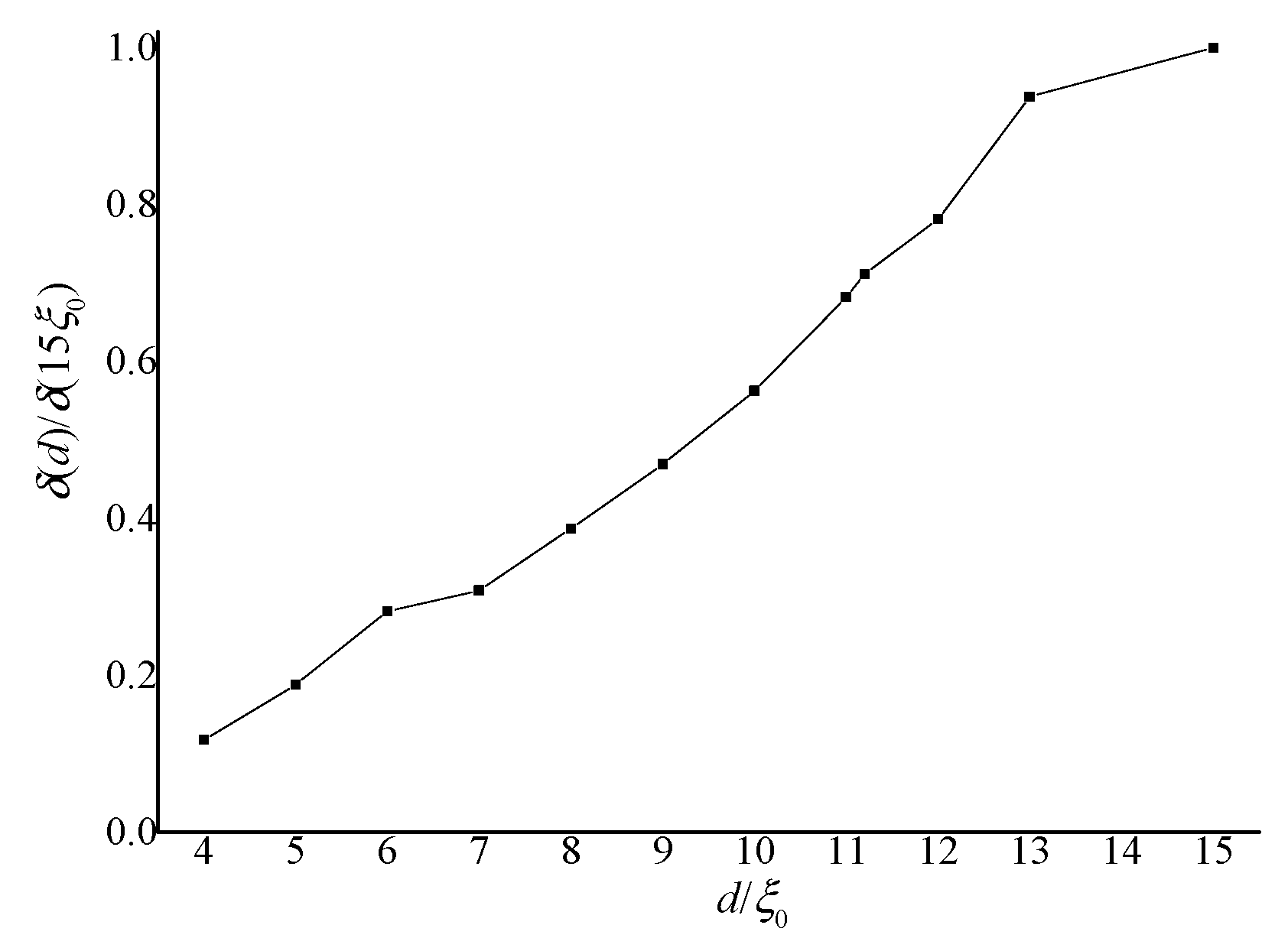
The relative deviations δ(d) = Δ(d)/d are calculated and normalized by δ(d)/δ(15 ξ
0) to analyze the influence of non-planar geometry.
Figure 4 shows the curves of δ(d)/δ(15 ξ
0) as a function of d/ ξ
0. In the figure, the relative deviations decrease with decreasing thickness
d.
A clearer explanation of this phenomenon is as follows: For a planar hybrid-aligned cell (R1→∞), the defect center is located in the middle of the system, with the energy on both sides of the defect equal. While for the non-planar cylindrical geometry, if the director configuration keeps the configuration of a planar cell, the energy on the inner side of the defect will be lower than that on the outer side, because that the volume on the inner side is smaller, relative to the outer side. Thus the defect center shifts to the inner side, and the director configuration of the nematic meanwhile changes, until the system reaches equilibrium. For fixed R1, the volume differences on the two sides of the middle of the system decrease with decreasing d, thus deviations decrease with decreasing d.
Figure 2.
Director field profile at the equilibrium state in a cross-section along an arbitrary azimuth inside the coaxial cylindrical system for R1 = 30 ξ0 with different thicknesses (d). The red dotted lines represent the middle of the simulation system. (a) d = 15 ξ0; (b) d = 13 ξ0; (c) d = 11.8 ξ0; and (d) d = 11.2 ξ0.
Figure 2.
Director field profile at the equilibrium state in a cross-section along an arbitrary azimuth inside the coaxial cylindrical system for R1 = 30 ξ0 with different thicknesses (d). The red dotted lines represent the middle of the simulation system. (a) d = 15 ξ0; (b) d = 13 ξ0; (c) d = 11.8 ξ0; and (d) d = 11.2 ξ0.
Figure 3.
Biaxiality β2 for different thicknesses (d) in a cross-section along an arbitrary azimuth inside the coaxial cylindrical system for R1 = 30 ξ0. The dotted and dashed lines represent the middle of the simulation system and the center of the defect, respectively. (a) d = 15 ξ0; (b) d = 13 ξ0; (c) d = 11.8 ξ0; (d) d = 11.2 ξ0; (e) d = 9 ξ0; and (f) d = 6 ξ0.
Figure 3.
Biaxiality β2 for different thicknesses (d) in a cross-section along an arbitrary azimuth inside the coaxial cylindrical system for R1 = 30 ξ0. The dotted and dashed lines represent the middle of the simulation system and the center of the defect, respectively. (a) d = 15 ξ0; (b) d = 13 ξ0; (c) d = 11.8 ξ0; (d) d = 11.2 ξ0; (e) d = 9 ξ0; and (f) d = 6 ξ0.
The energy calculation shows that the energy in the “inner” region of the cylindrical geometry is higher than that in the “outer” region, indicating that more energy can be saved by shrinking the disclination to a smaller radius to reduce its total length. In addition, the shrinking of the disclination to a smaller radius also helps to decrease the total energy of the system.
Figure 4.
Curves of calculated δ(d)/δ(15 ξ0) as a function of d/ξ0.
Figure 4.
Curves of calculated δ(d)/δ(15 ξ0) as a function of d/ξ0.
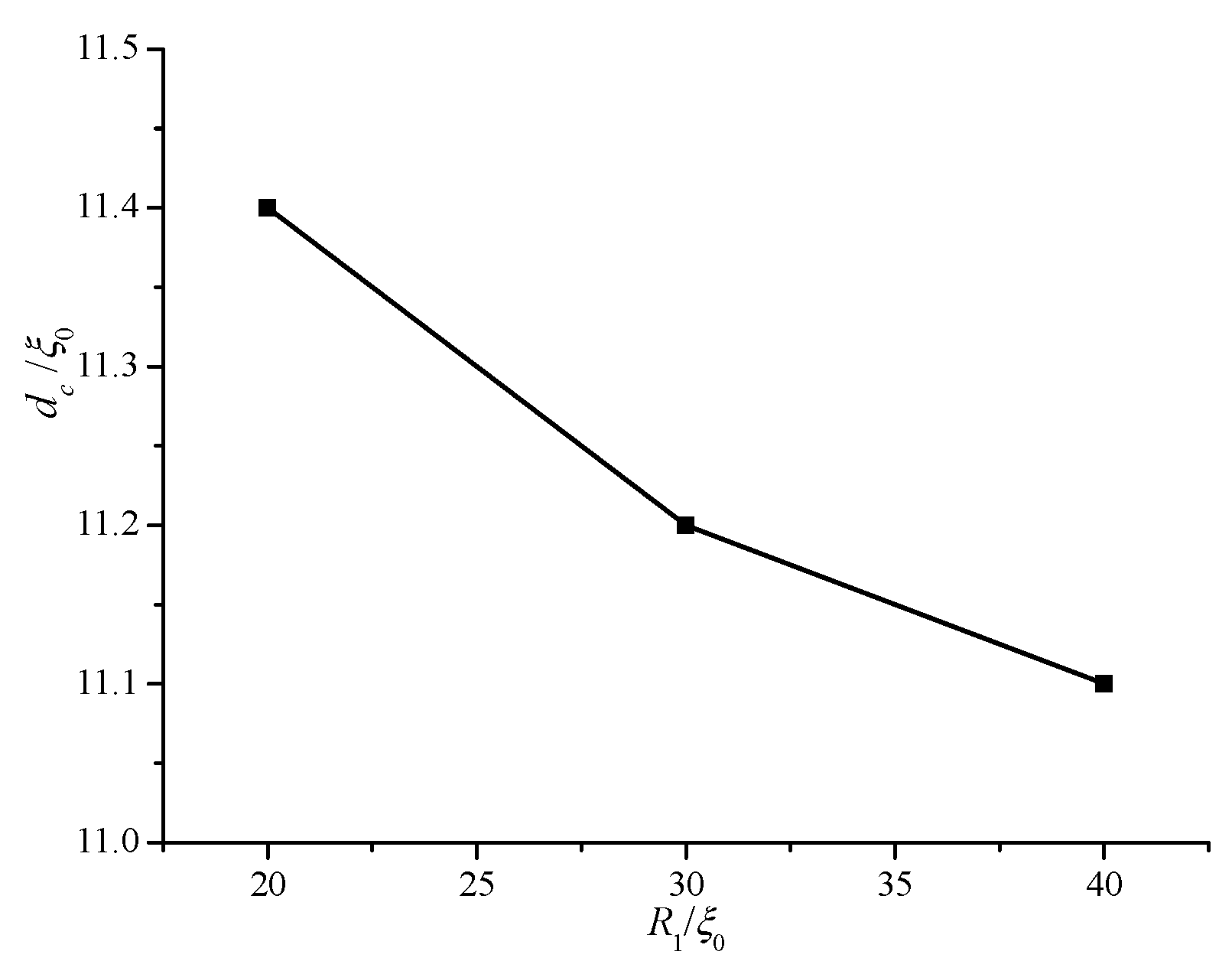
The conditions of
R1 = 20 ξ
0 and
R1 = 40 ξ
0 are also investigated to explore the influence of internal radius
R1 on equilibrium texture and transition. The critical
dc values for different
R1 values are shown in
Figure 5. The value of
dc increases with decreasing
R1. This behavior indicates that the smaller the internal radius
R1, the earlier the biaxial transition occurs. Therefore, a non-planar cylindrical system induces easy biaxial transition. The cylindrical system gradually flattens with increasing
R1. Thus, we predict that
dc gradually becomes equal to that of a planar cell with increasing
R1.
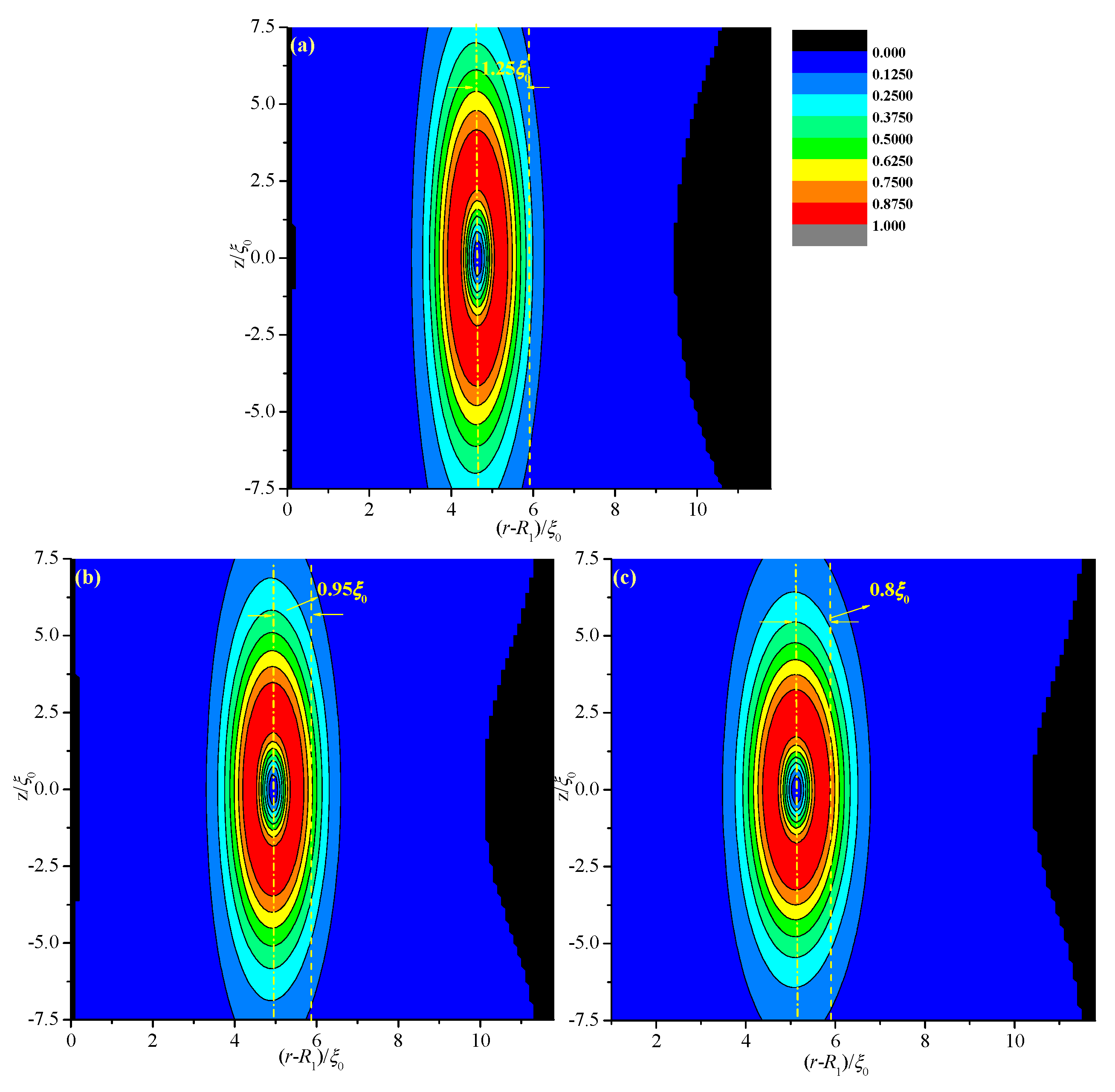
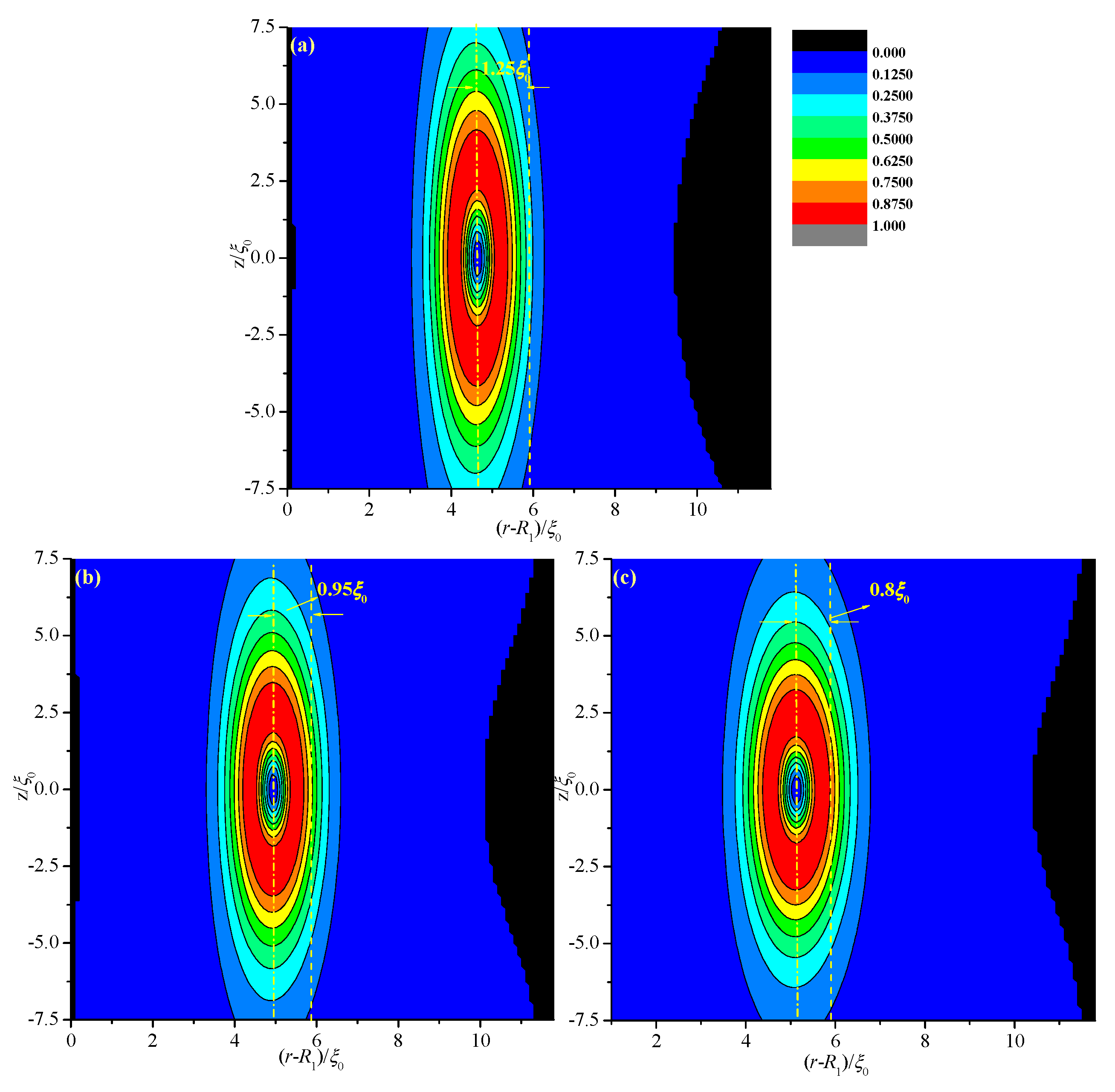
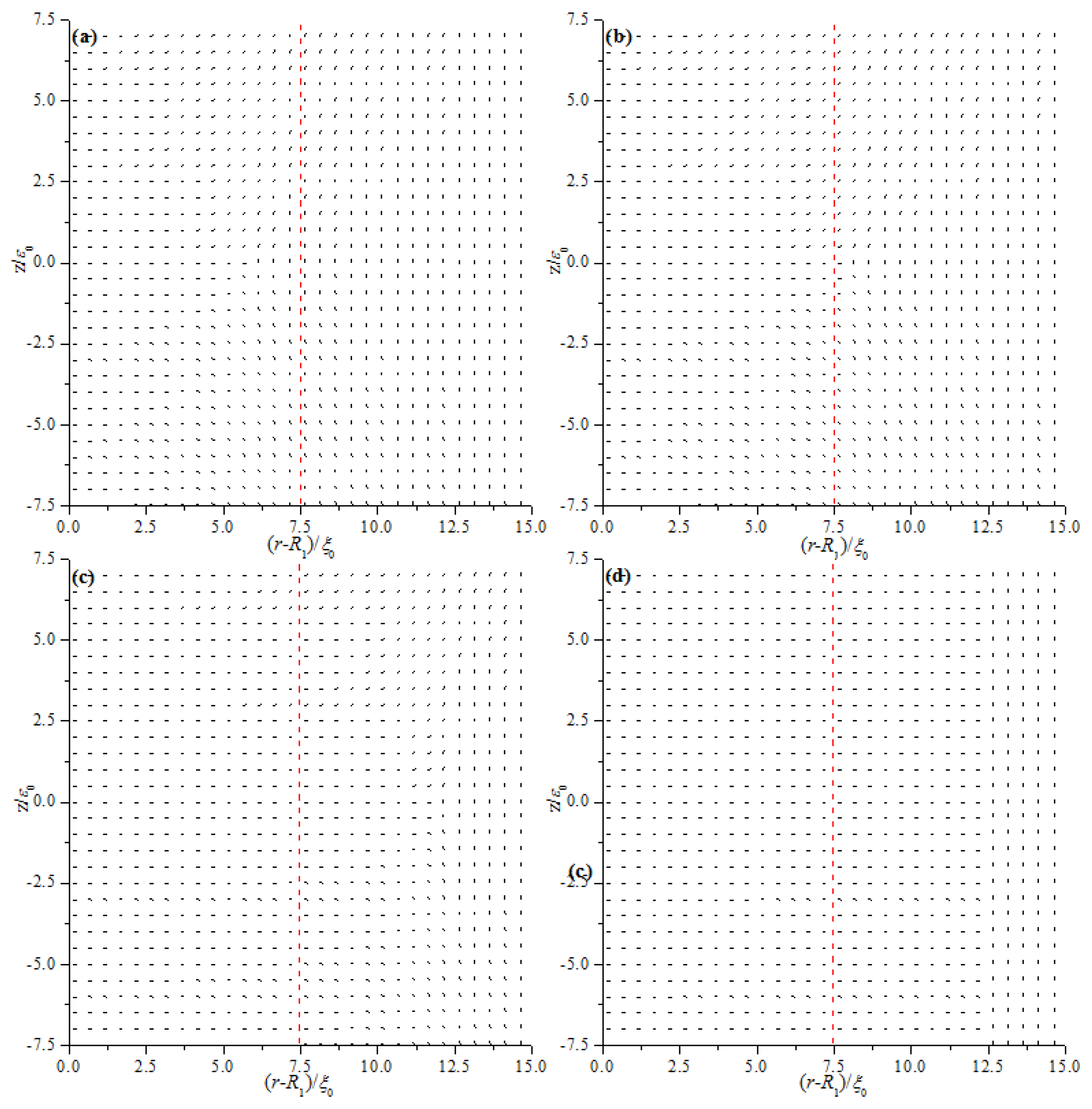
Figure 6 shows the biaxiality β
2 in a cross-section for different values of
R1 with fixed thickness
d = 11.8 ξ
0. Deviations Δ(
d) are 1.25 ξ
0 (
R1 = 20 ξ
0), 0.95 ξ
0 (
R1 = 30 ξ
0), and 0.8 ξ
0 (
R1 = 40 ξ
0); this finding indicates that Δ(
d) decreases with increasing
R1 or with gradual flattening of the system. That is because for fixed
d, the volume ratio on the two sides of the middle of the system decreases with increasing
R1. We predict that Δ(
d) gradually approaches zero when
R1 approaches infinity.
Figure 5.
Critical values of dc for different internal radii (R1).
Figure 5.
Critical values of dc for different internal radii (R1).
Figure 6.
Biaxiality β2 in a cross-section along an arbitrary azimuth inside the coaxial cylindrical system for different internal radii (R1) with a certain thickness d = 11.8 ξ0. The dotted and dashed lines represent the middle of the simulation system and the center of the defect, respectively. (a) R1 = 20 ξ0; (b) R1 = 30 ξ0; and (c) R1 = 40 ξ0.
Figure 6.
Biaxiality β2 in a cross-section along an arbitrary azimuth inside the coaxial cylindrical system for different internal radii (R1) with a certain thickness d = 11.8 ξ0. The dotted and dashed lines represent the middle of the simulation system and the center of the defect, respectively. (a) R1 = 20 ξ0; (b) R1 = 30 ξ0; and (c) R1 = 40 ξ0.
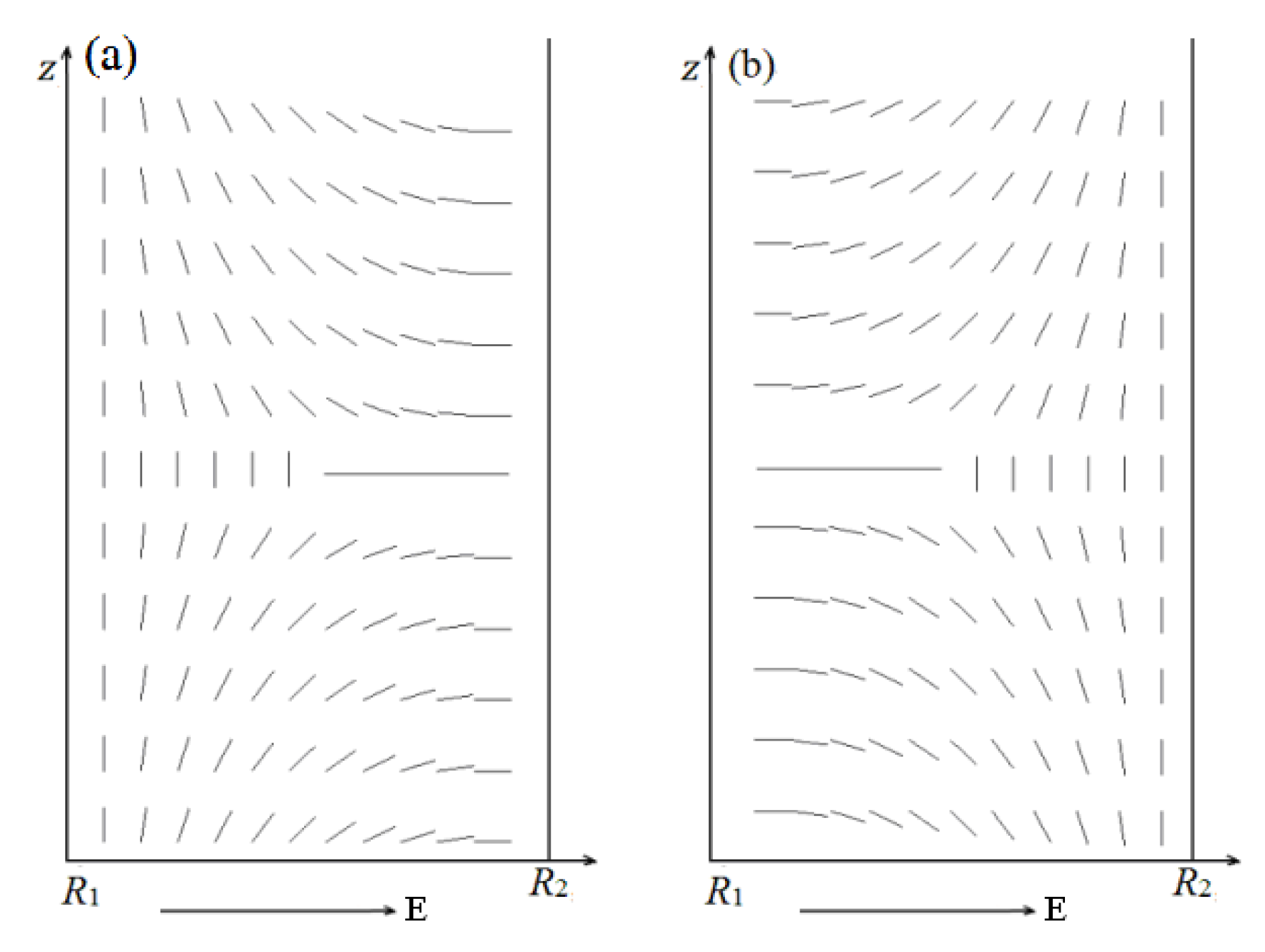
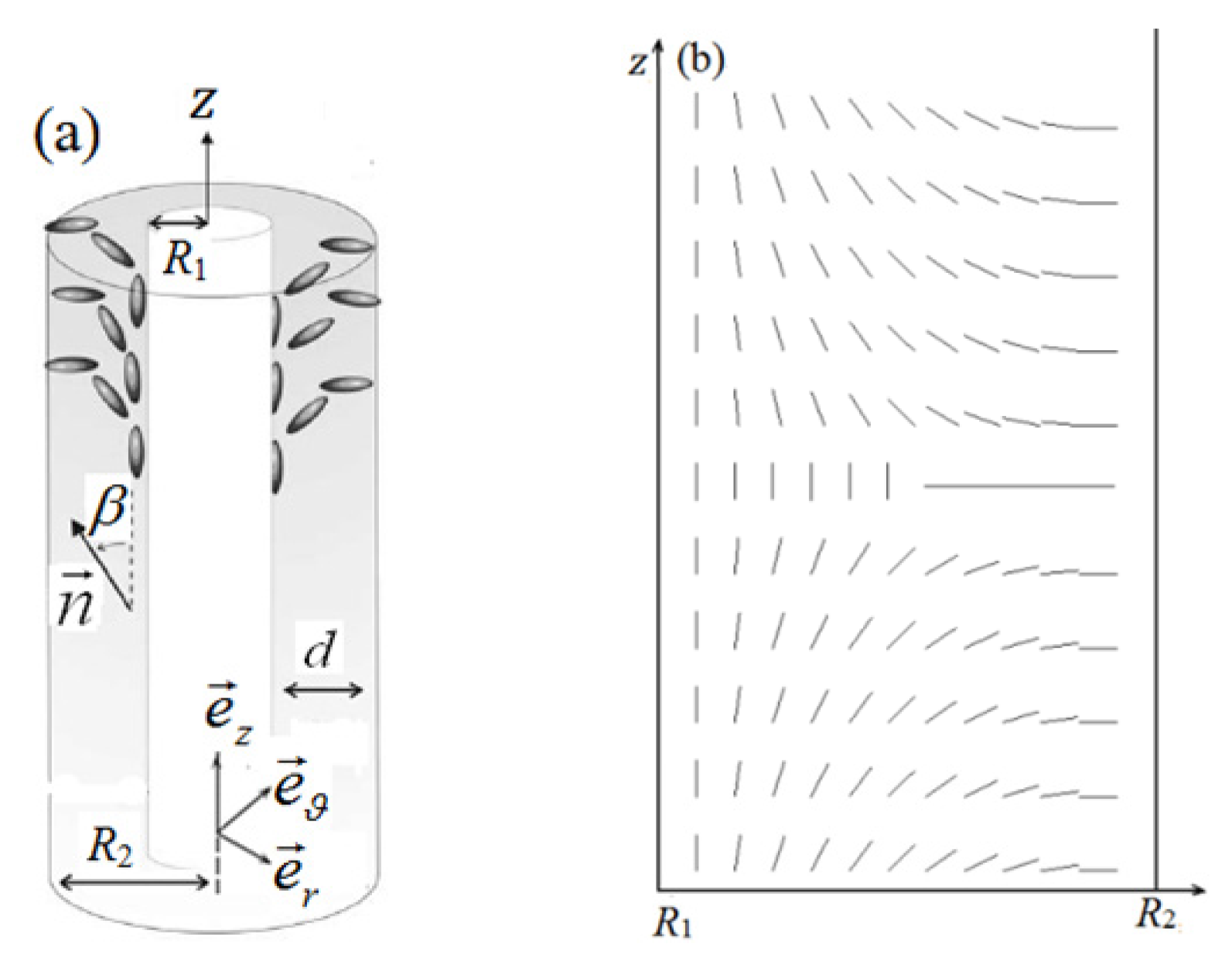
3.2. Structure Transition Induced by Electric Field
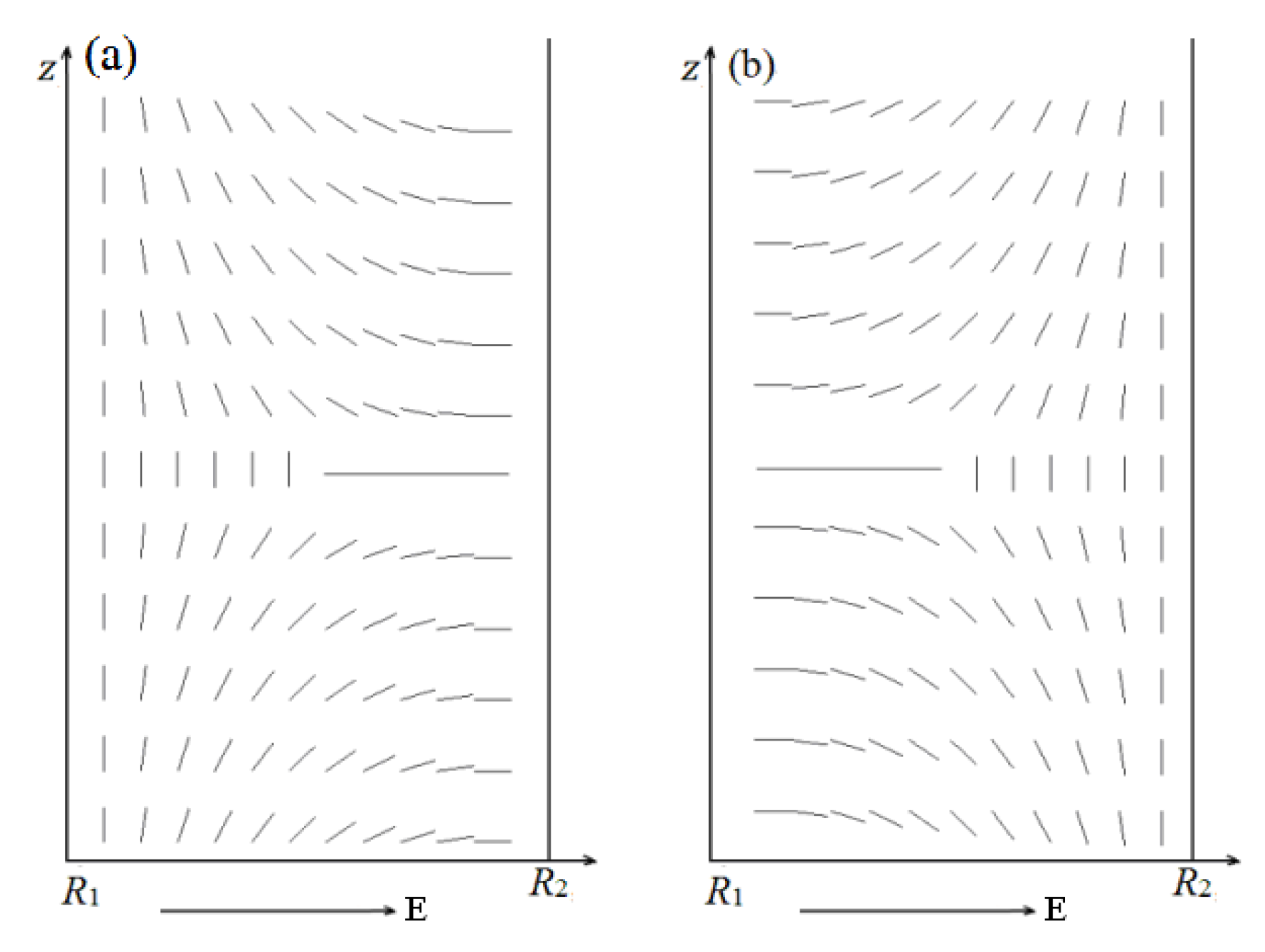
In this section, two models are established to analyze the combined effect of geometry and electric field
. Boundaries on both coaxial cylindrical surfaces are exchanged for the two models, as shown in
Figure 7. Simulations are conducted at internal radius
R1 = 30
ξ0 and thickness
d = 15
ξ0.
Figure 7.
Director profile in a cross-section along an arbitrary radius of the system for the two models. (a) Models I and (b) II.
Figure 7.
Director profile in a cross-section along an arbitrary radius of the system for the two models. (a) Models I and (b) II.
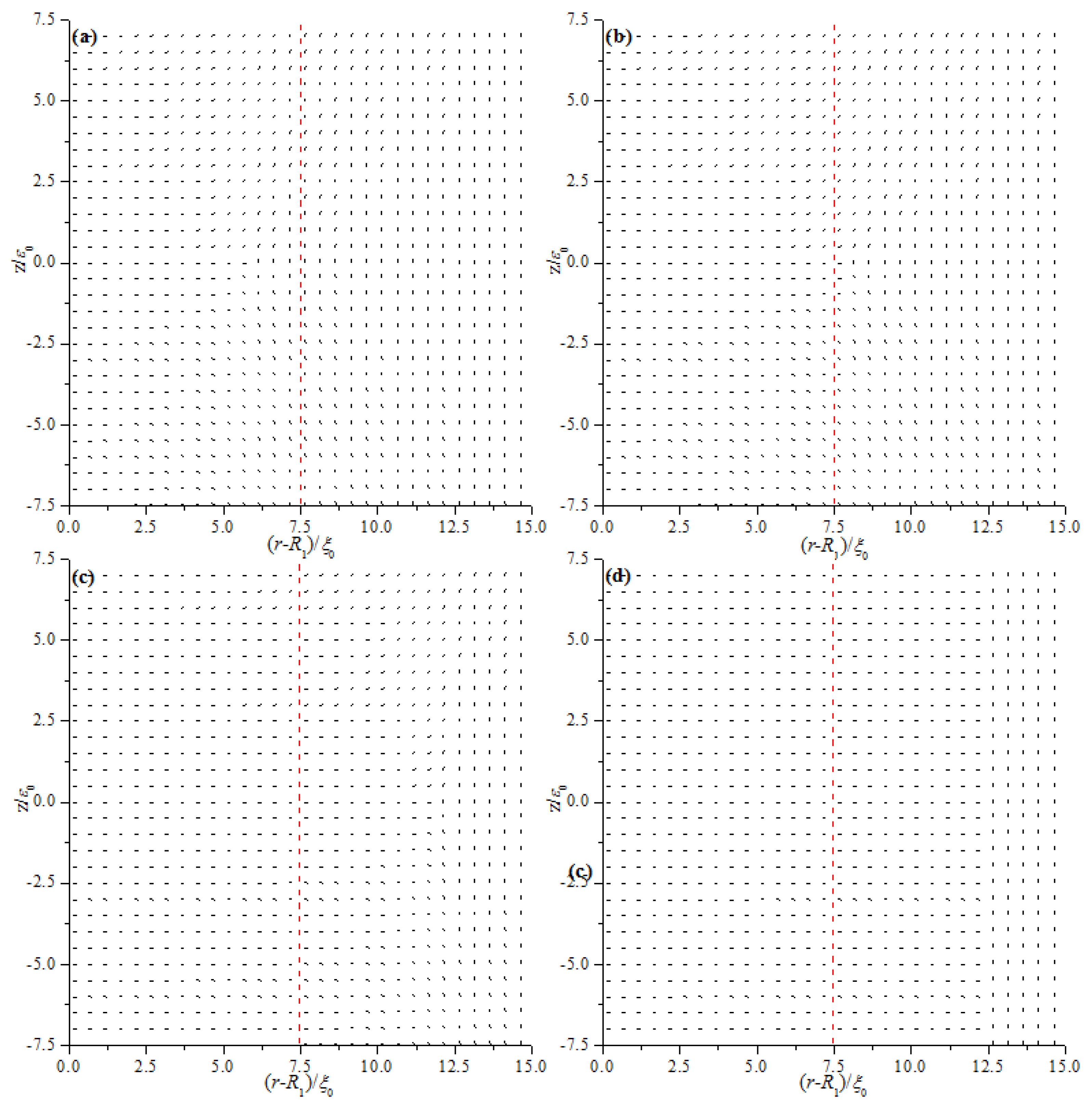
Figure 8 and
Figure 9 show the director field profile and the calculated biaxiality β
2 in a cross-section along an arbitrary azimuth as a function of
for model I, and
Figure 10 and
Figure 11 show the results for model II, respectively. The disclination loops shift to the internal surface at
, which is caused by the non-planar cylindrical geometry. The defect is pushed further toward the internal surface for model I with increasing
, whereas the defect initially shifts to the middle of the system and then to the external surface for model II. Because of the strong anchoring boundaries, the defects exhibit dramatic changes in shape as the distance between defect center and the surface boundary decreasing, especially when the defect center lies very close to the surface, a biaxial layer is established, that is order reconstruction occurs [
9,
24,
25]. Our results show that order reconstruction occurs at critical values of
0.21 and
0.25 for models I and II, respectively. For comparison, a planar cell is also simulated with the same parameters, and the corresponding reduced critical value of electric field is
0.24. The values are clearly ranked as follows:
.
Non-planar cylindrical geometry induces disclination loops to shrink for both models, whereas electric field , which tends to enforce the nematic director along the axis, expulses the defect to the internal and external surfaces for models I and II, respectively. It means that the effects of the cylindrical geometry and electric field are common for model I, but opposite for model II. Hence, the transition process differs between the two models. The common action of the cylindrical geometry and electric field for model I makes the defect close to the surface boundary more easily than model II, since the opposite action of the cylindrical geometry and electric field makes it difficult for the defect to be close to the surface boundary. From the above, the common action of the cylindrical geometry and electric field for model I facilitates order reconstruction, while the opposite action of the cylindrical geometry and electric field for model II complicates order reconstruction. For a planar cell, only the action of electric field exists. Considering these factors, our result is reasonable.
Note that the radial direction uniform electric field has been assumed, which is difficult to implement or almost impossible in practice. Our results only give the qualitative analysis about the effect of the electric field as well as the combined effect of geometry and the electric field. We can conclude that for the actual cylindrical symmetric radial direction electric field , the same conclusion is reached in nature. The detailed and definite results for the actual cylindrical symmetric radial direction electric field are a task for the future.
Figure 8.
Director field profile at the equilibrium state in a cross-section along an arbitrary azimuth inside the cylindrical system for different values for model I. (a) ; (b) ; (c) ; and (d) .
Figure 8.
Director field profile at the equilibrium state in a cross-section along an arbitrary azimuth inside the cylindrical system for different values for model I. (a) ; (b) ; (c) ; and (d) .
Figure 9.
Biaxiality β2 in a cross-section along an arbitrary azimuth inside the cylindrical system for different values for model I. (a) ; (b) ; (c) ; and (d) .
Figure 9.
Biaxiality β2 in a cross-section along an arbitrary azimuth inside the cylindrical system for different values for model I. (a) ; (b) ; (c) ; and (d) .
Figure 10.
Director field profile at the equilibrium state in a cross-section along an arbitrary azimuth inside the cylindrical system for different values model II. (a) ; (b) ; (c) ; and (d) .
Figure 10.
Director field profile at the equilibrium state in a cross-section along an arbitrary azimuth inside the cylindrical system for different values model II. (a) ; (b) ; (c) ; and (d) .
Figure 11.
Biaxiality β2 in a cross-section along an arbitrary azimuth inside the cylindrical system for different values for model II. (a) ; (b) ; (c) ; and (d) .
Figure 11.
Biaxiality β2 in a cross-section along an arbitrary azimuth inside the cylindrical system for different values for model II. (a) ; (b) ; (c) ; and (d) .


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}