
Optimization and Analysis of Plates with a Variable Stiffness Distribution in Terms of Dynamic Properties



Abstract
1. Introduction
2. Methods
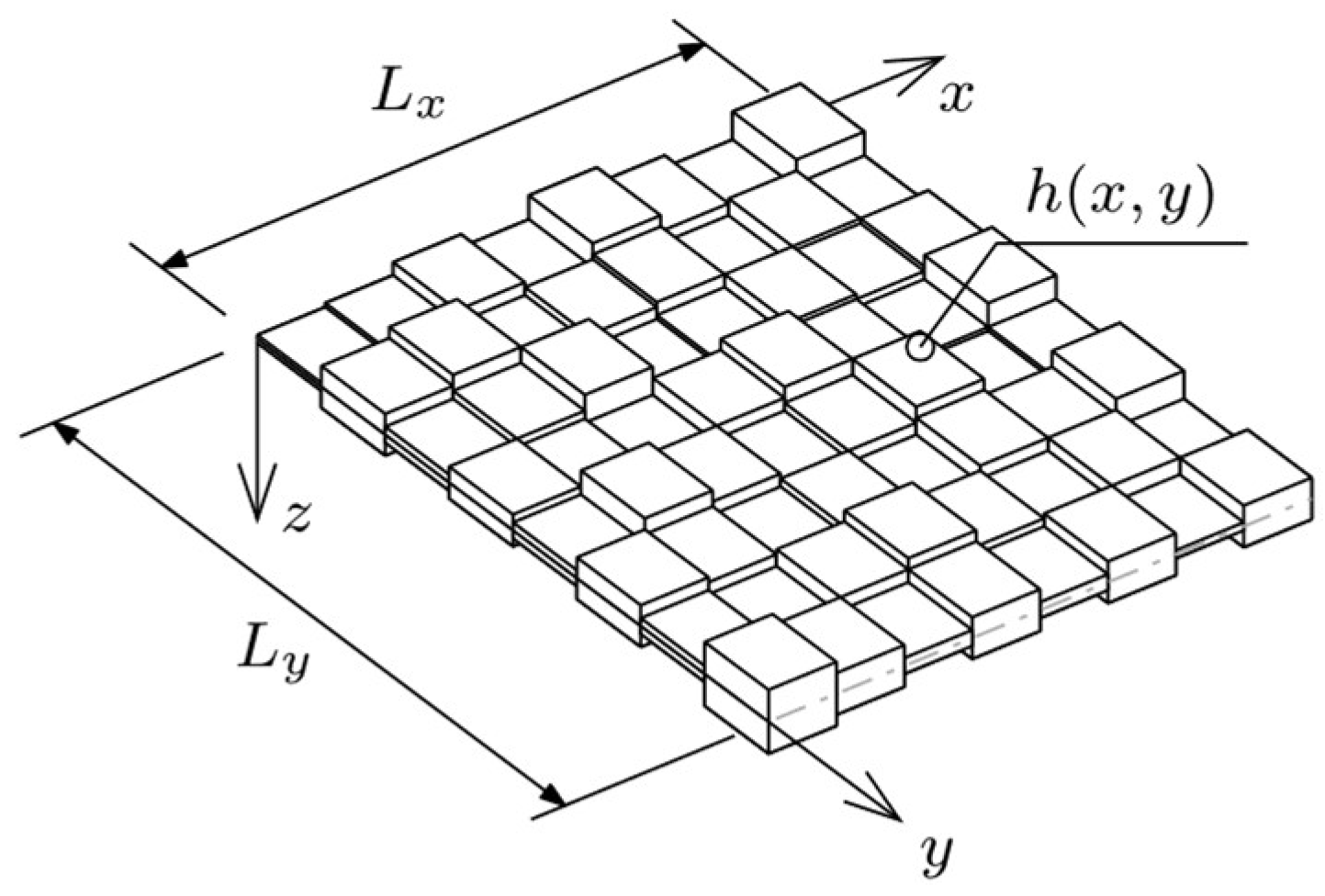
2.1. Theoretical Background
- Straight lines normal to the mid-surface remain straight and normal after deformation.
- The plate thickness remains constant during deformation.
- Transverse shear deformations are negligible, εzz = 0.
2.2. Problem Solution Framework
2.2.1. Numerical Solution
2.2.2. Optimization Technique
2.2.3. Application Parameters
3. Results
3.1. Frequency Optimization
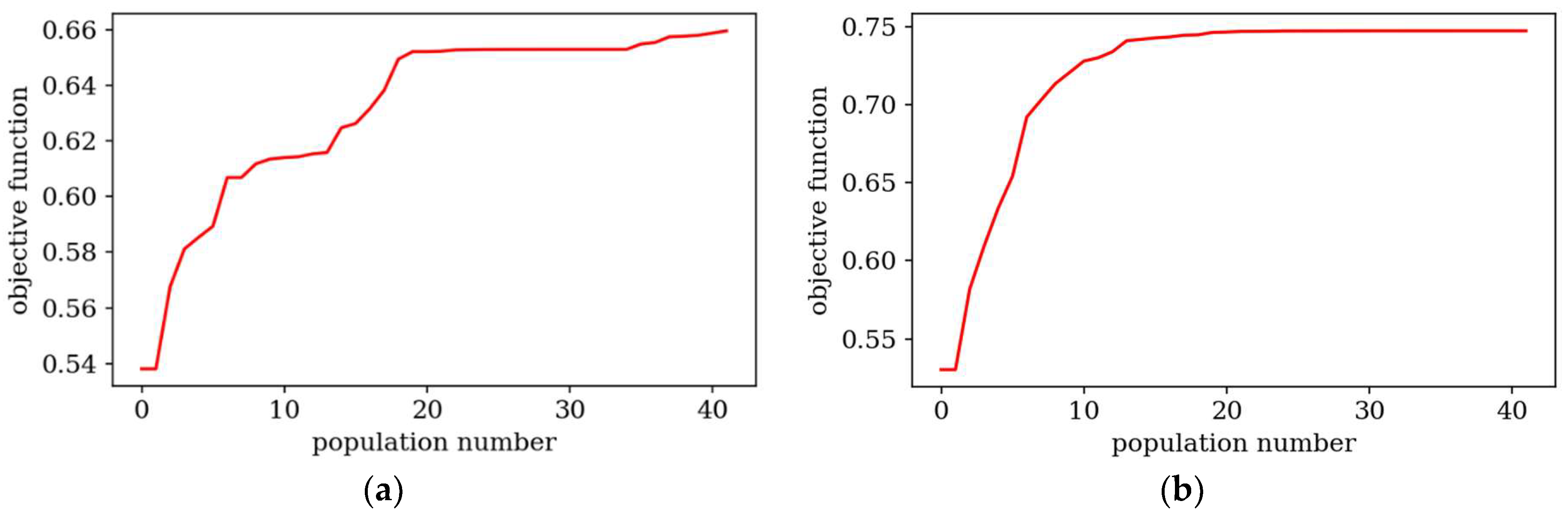
3.1.1. Optimization Process
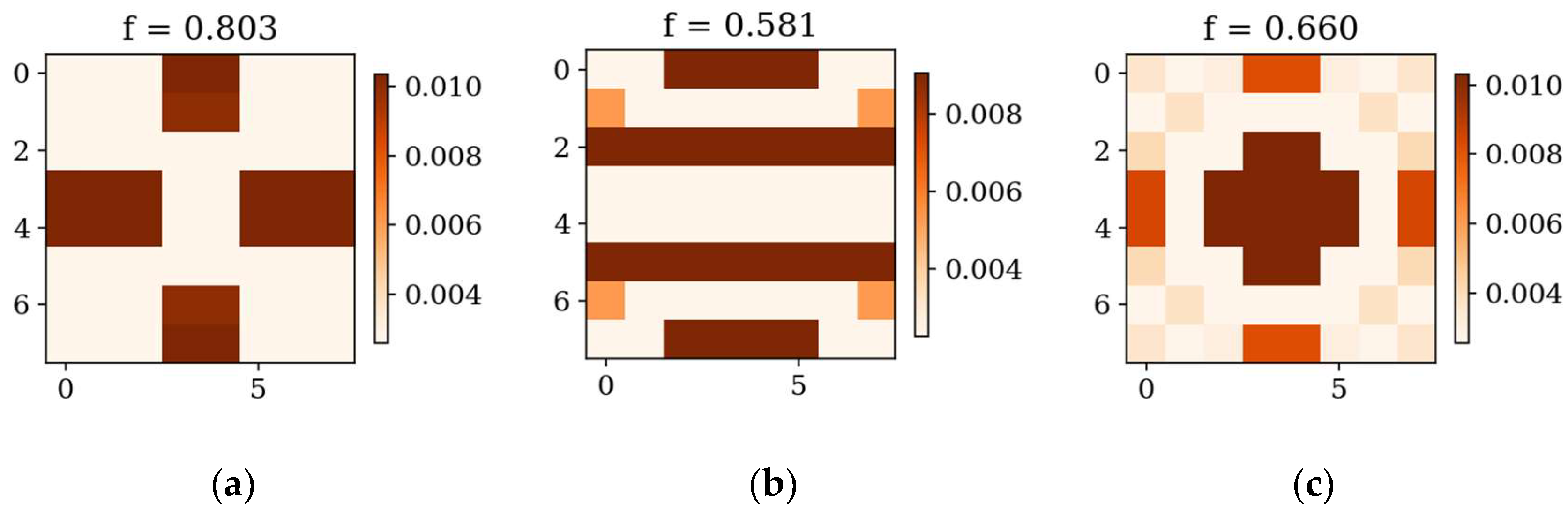
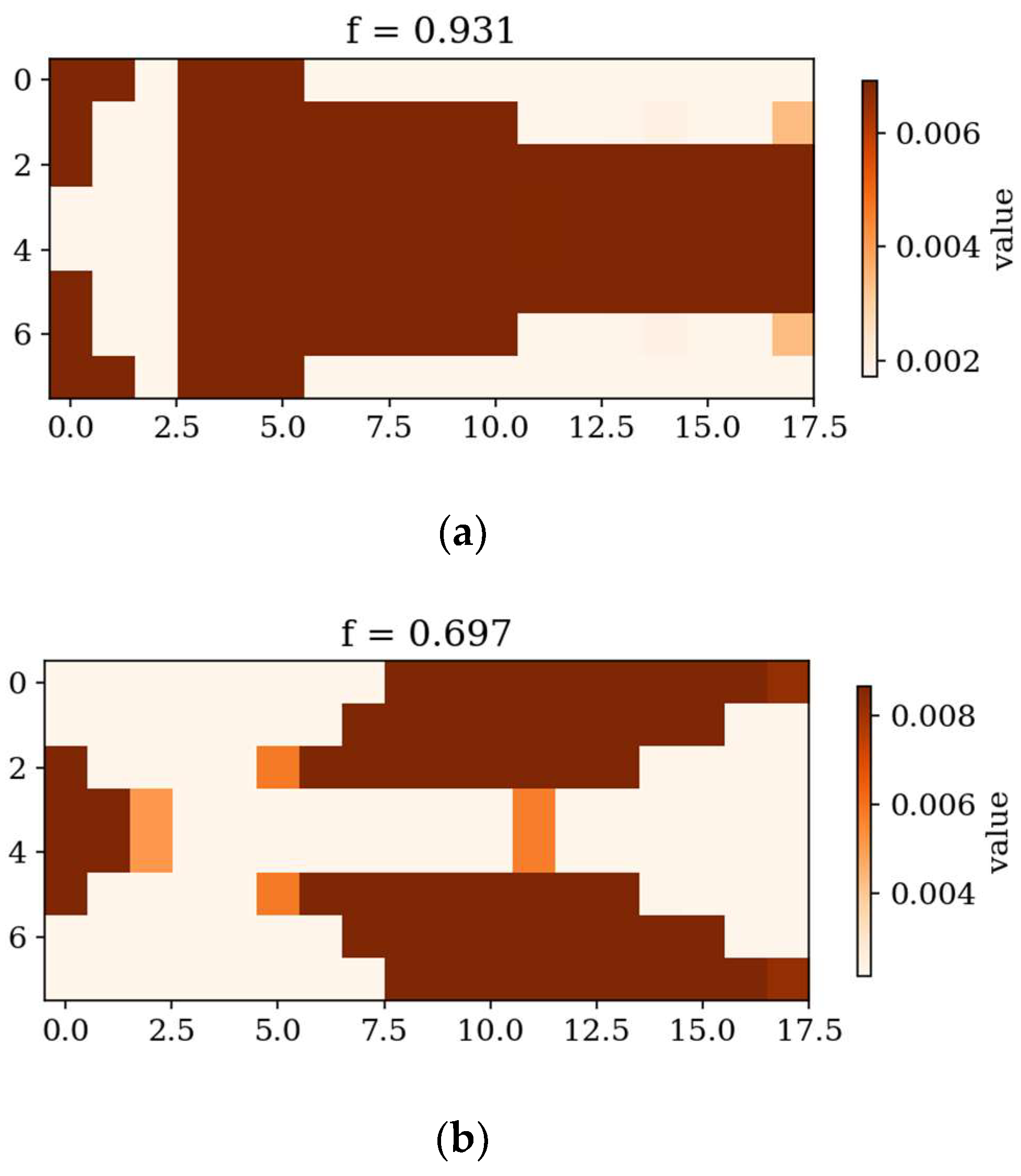
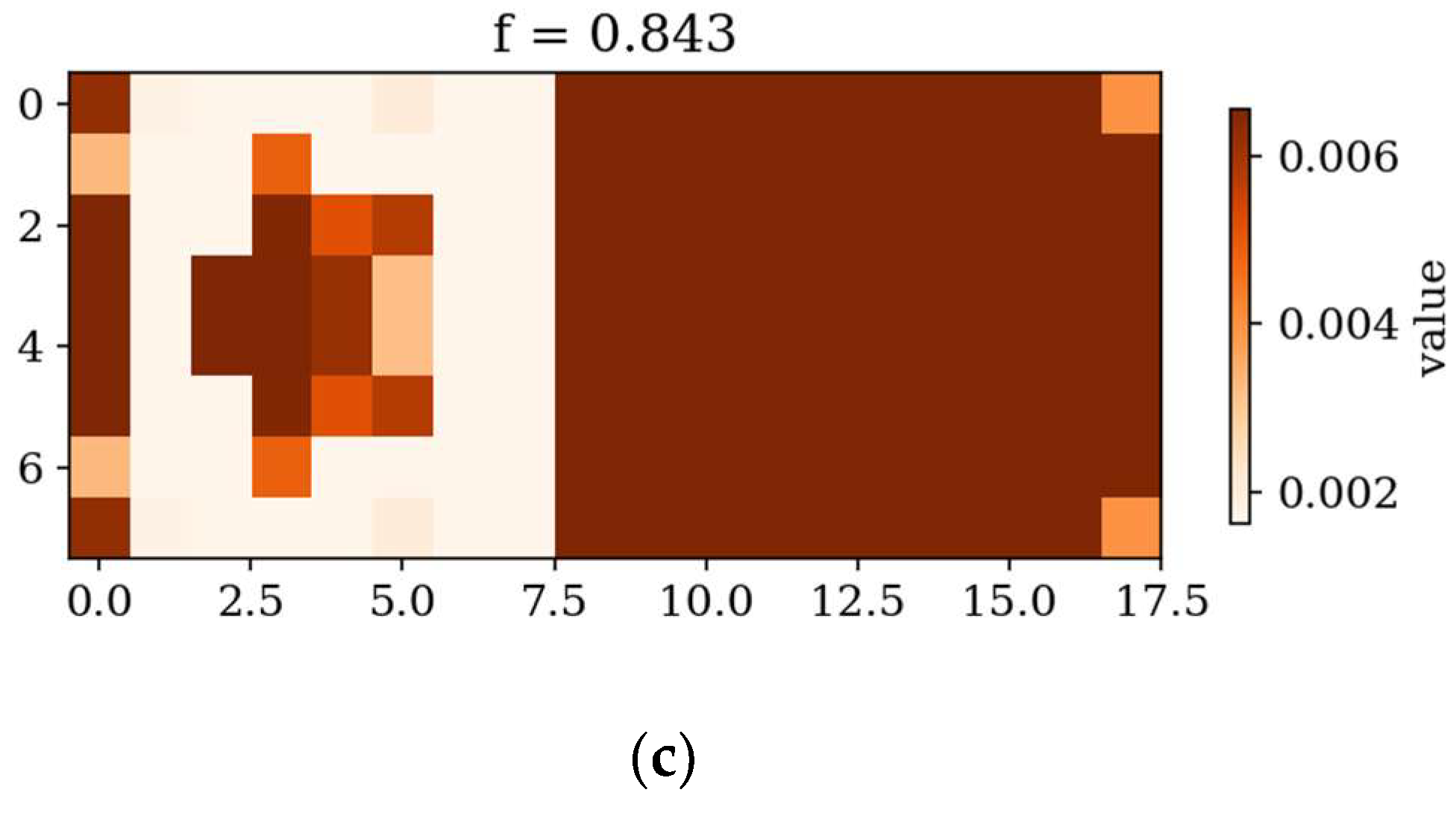
3.1.2. Optimization Outcomes
3.2. Dynamic Response Analysis
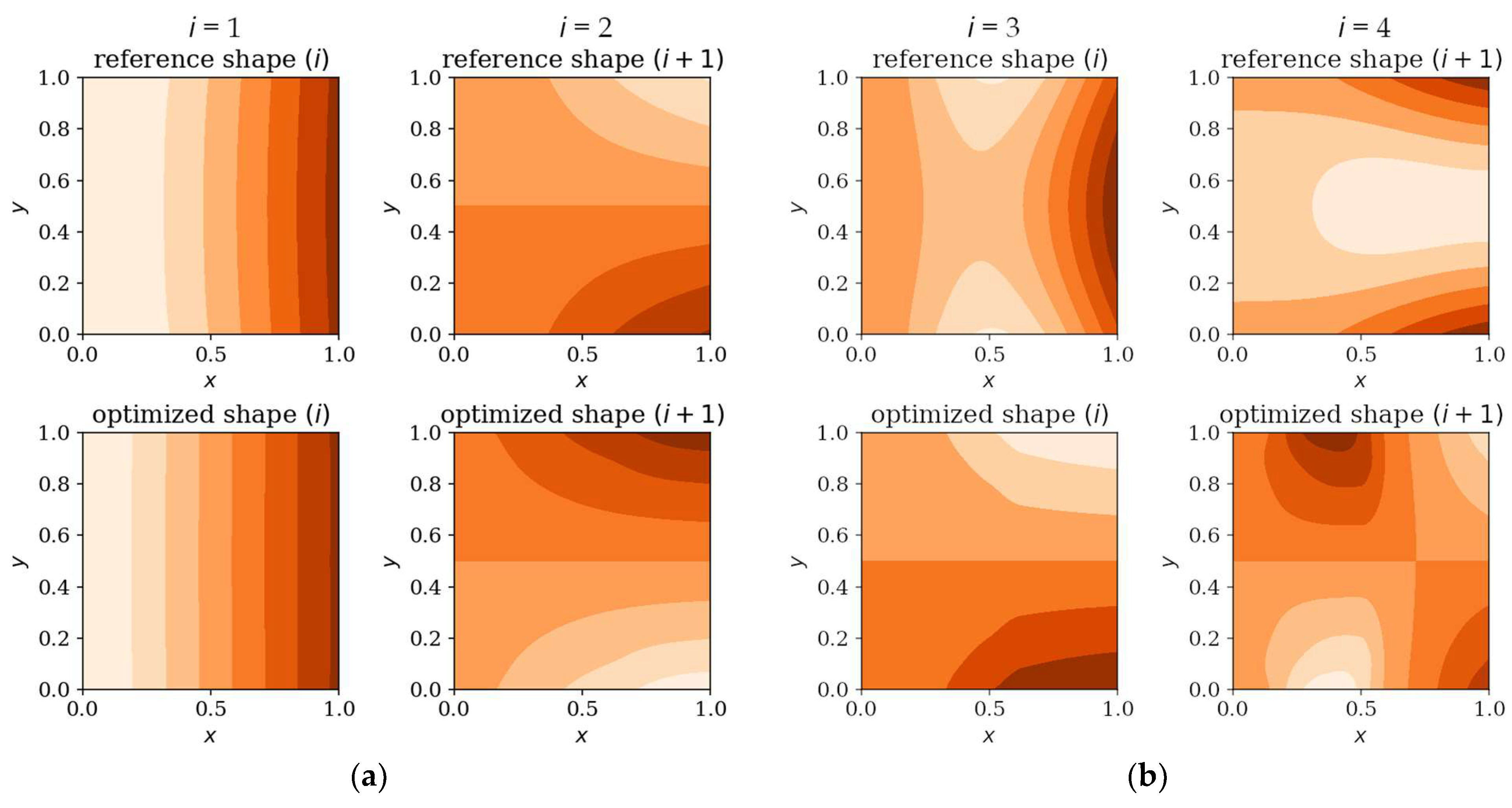
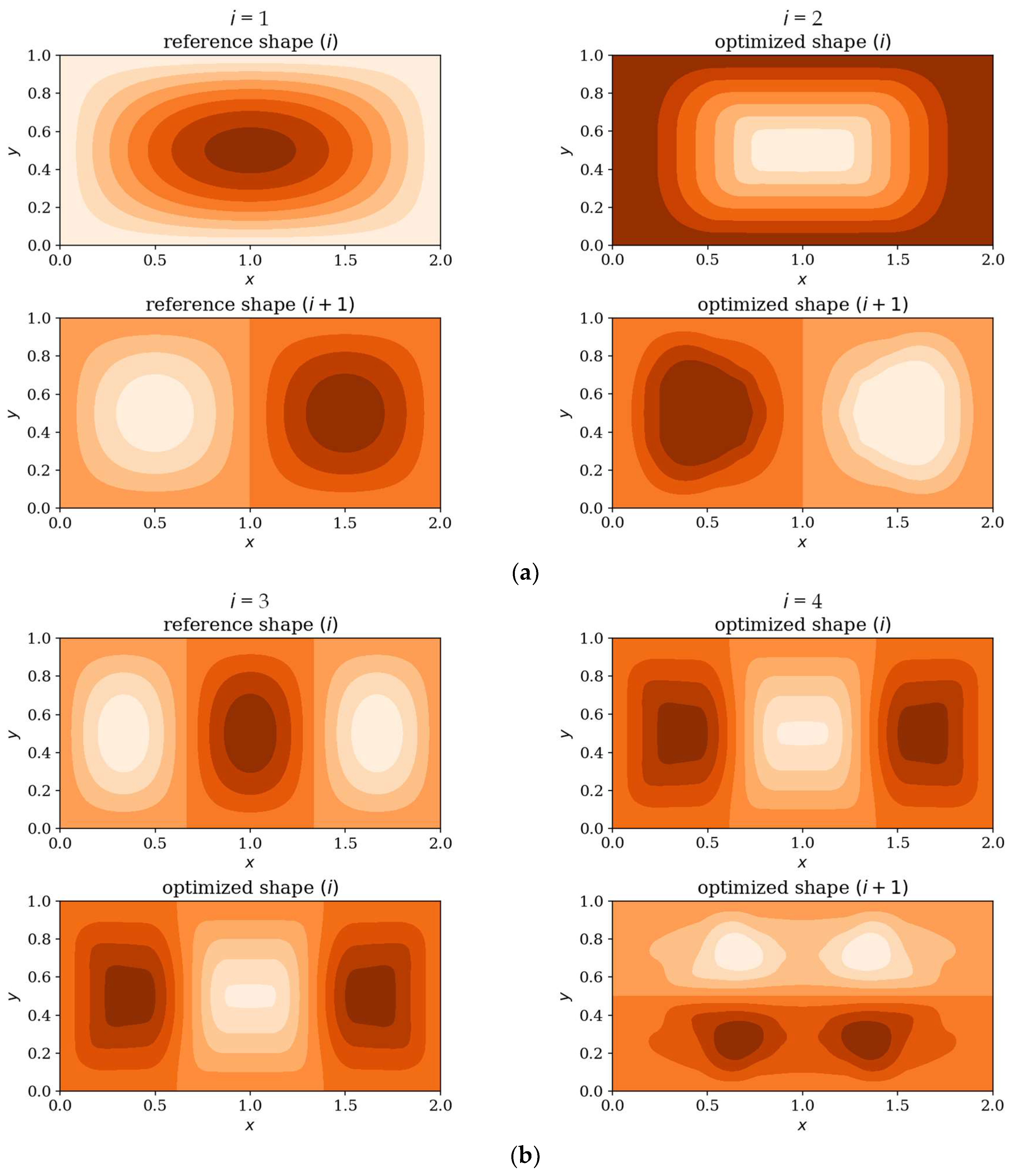
3.3. Natural Forms
3.4. Gradient-Based Optimization Tool
4. Discussion
5. Conclusions
- The application of GAs proved to be effective in optimizing the plates for maximizing the gaps between natural frequencies. Optimized structural elements exhibited increased gaps between adjacent natural frequencies, according to the defined fitness function.
- Unlike prior studies focusing on infinite periodic plates or single-unit-cell models, this work introduces a GA tailored for finite plates with realistic boundary conditions. By enforcing symmetry constraints in chromosome encoding and integrating FEM-based dynamic analysis, the algorithm achieves up to 34.85% higher objective function values than gradient-based method (SLSQP) for complex cases.
- The GA’s mutation strategies and crossover mechanisms are explicitly defined, addressing a gap in the prior literature. This transparency enables reproducibility and adaptation for similar structural optimization problems.
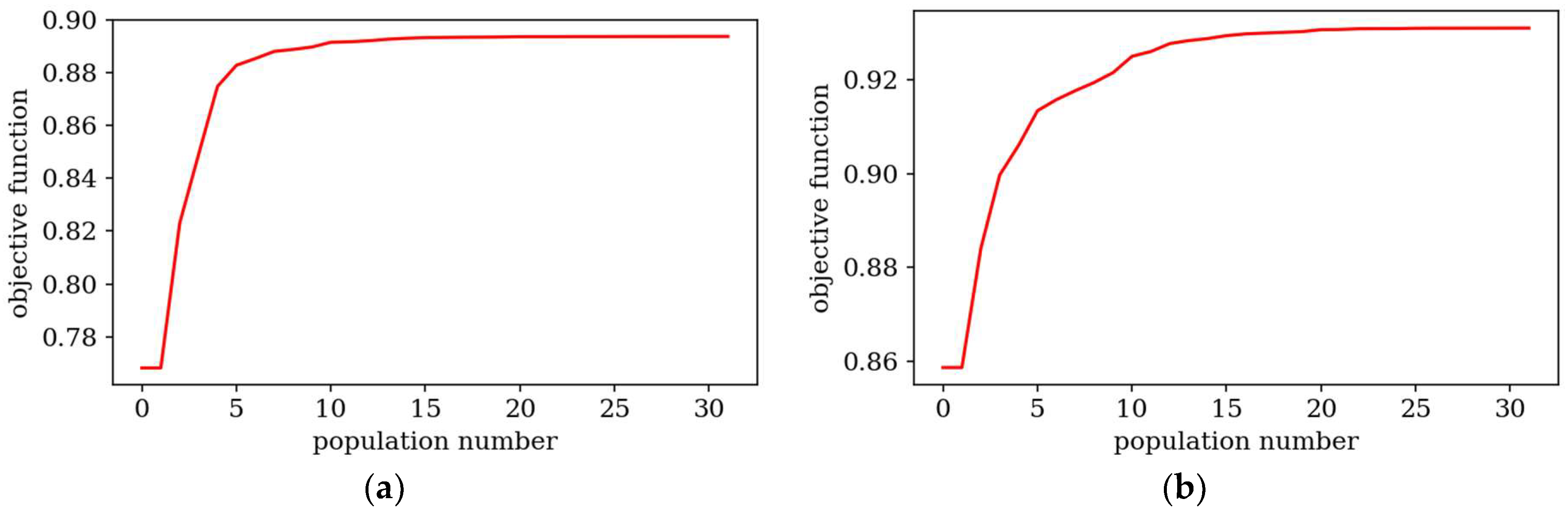
- Faster convergence in the optimization process is observed when optimizing for lower natural frequencies compared to higher frequencies.
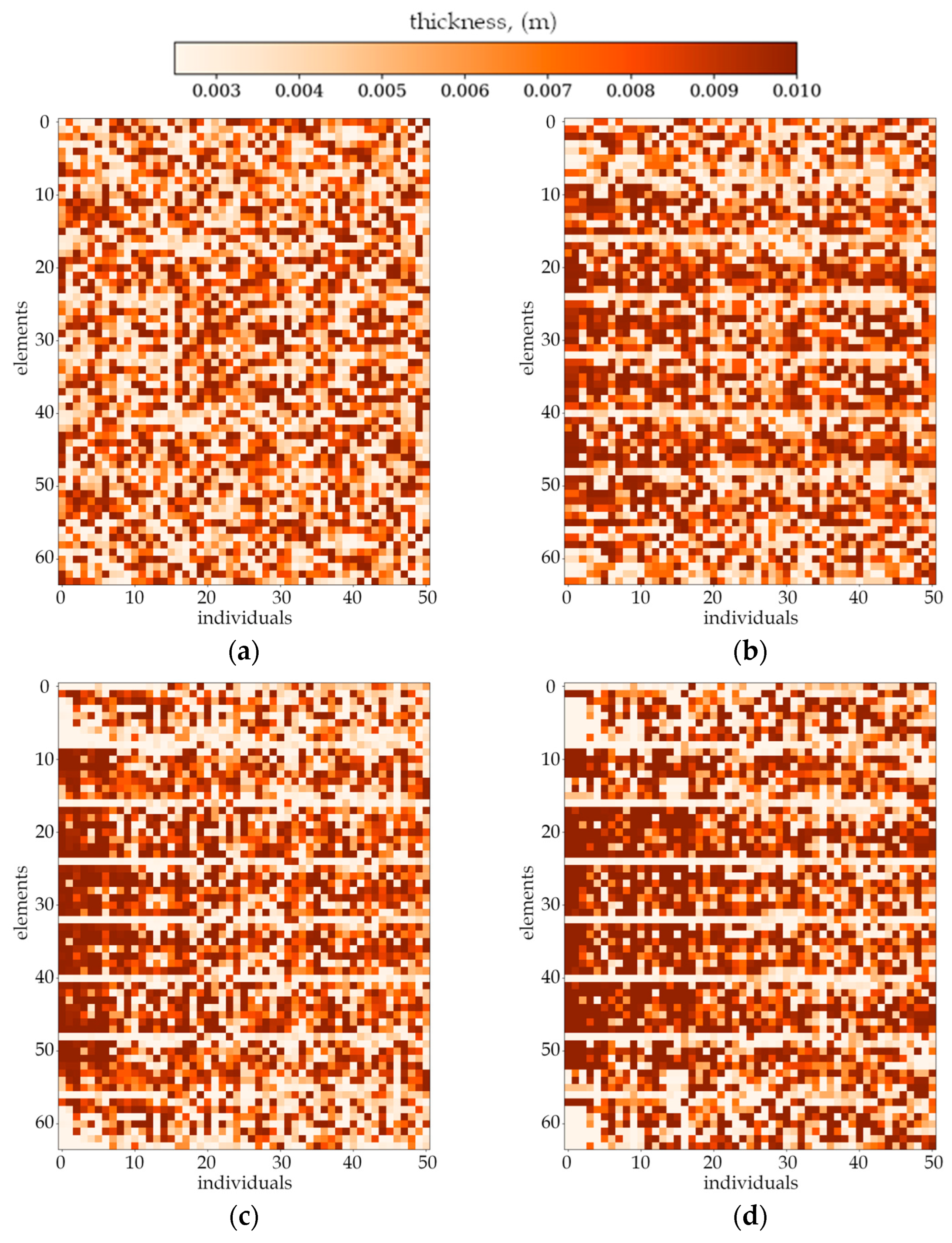
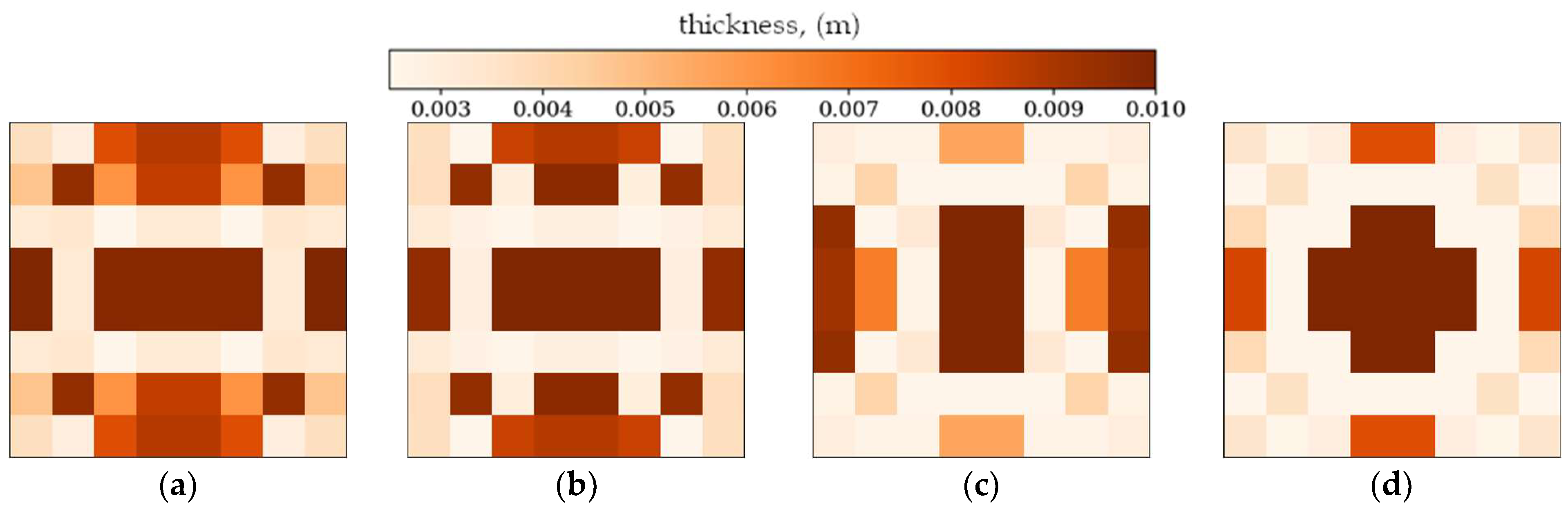
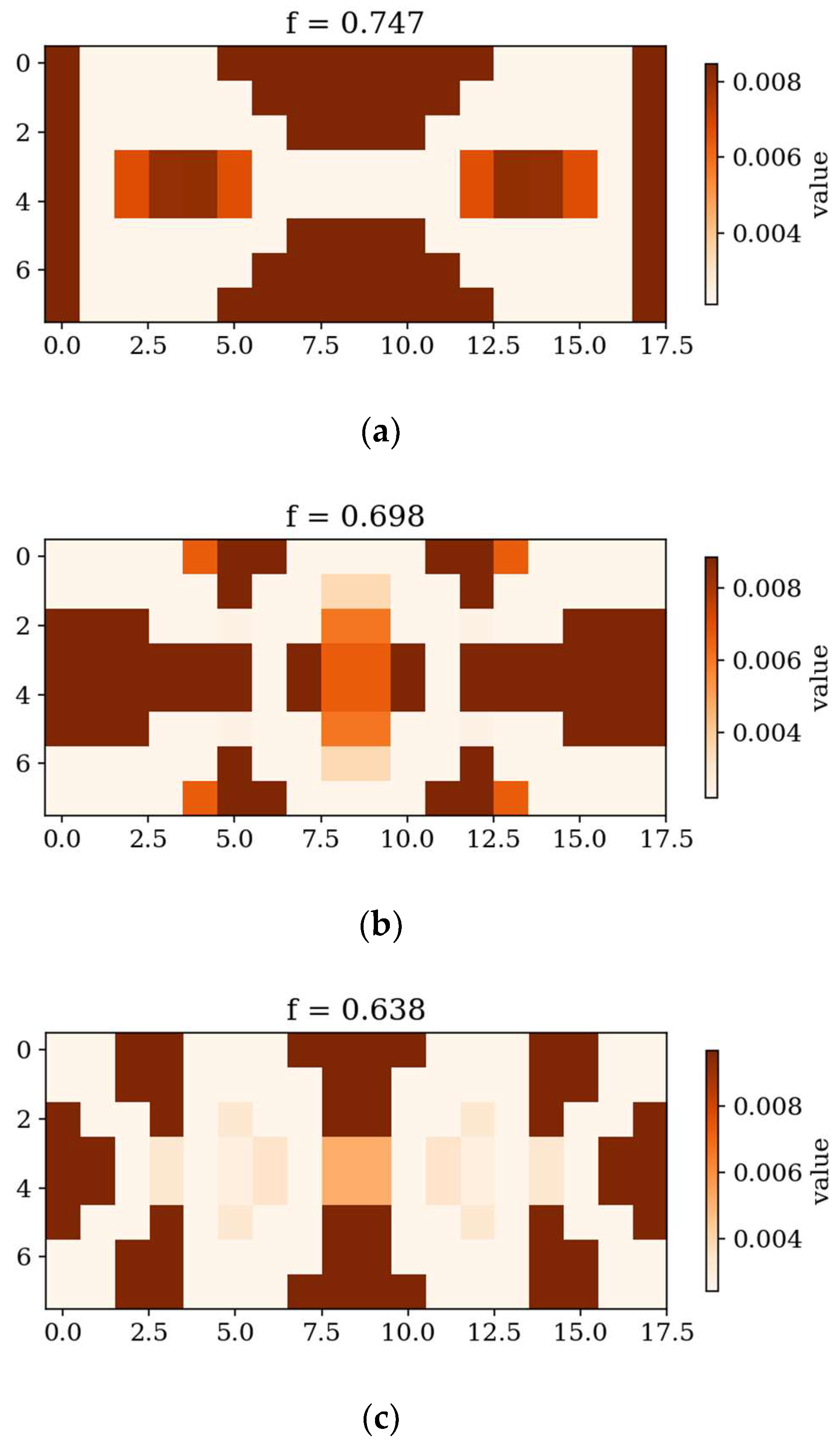
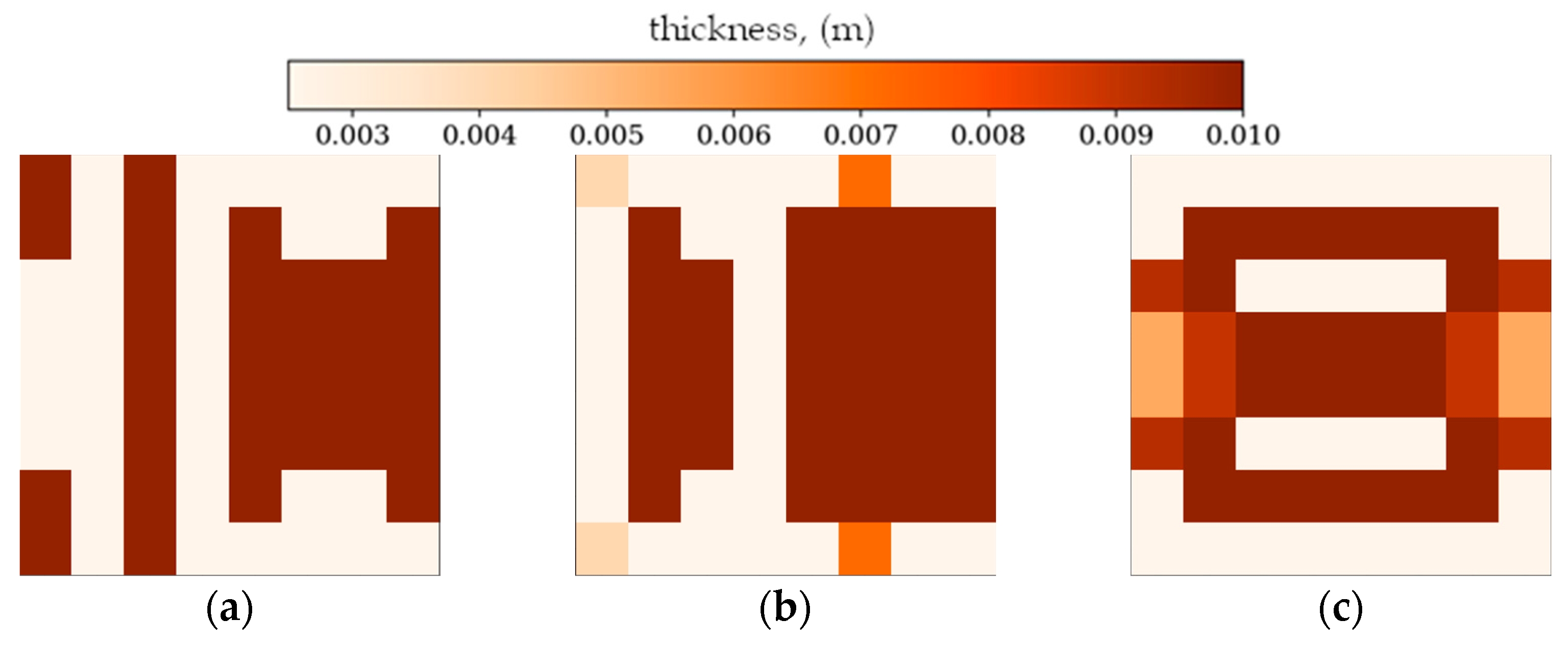
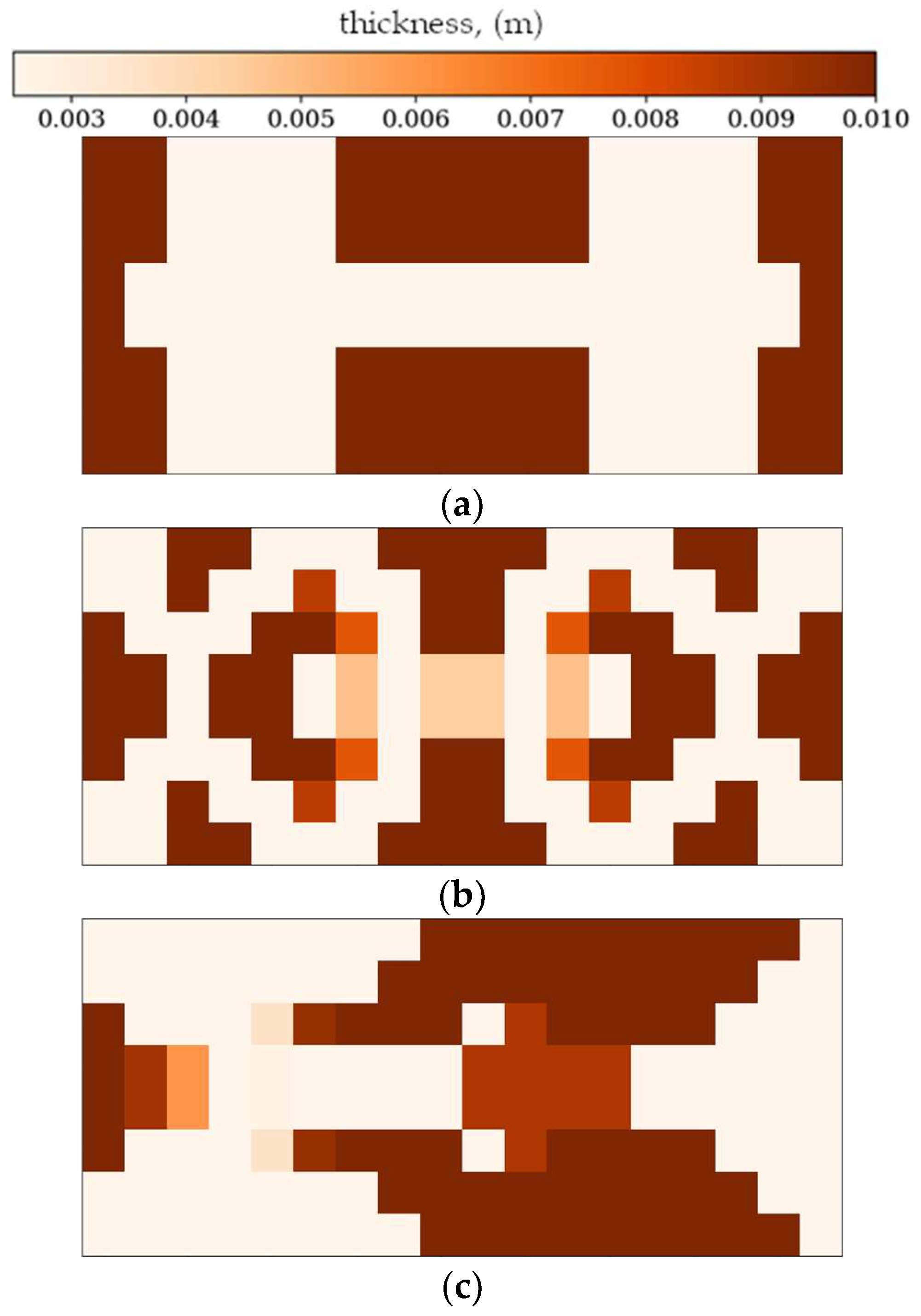
- For lower frequencies (Δω1), the thickness distribution is simpler, covering larger regions, whereas for higher frequencies (Δω2, Δω3), the patterns are more complex with varied thicknesses.
- The optimized plates show a structure related to vibration modes, which is especially visible at higher frequencies. This correlation could enable targeted stiffening of nodal regions.
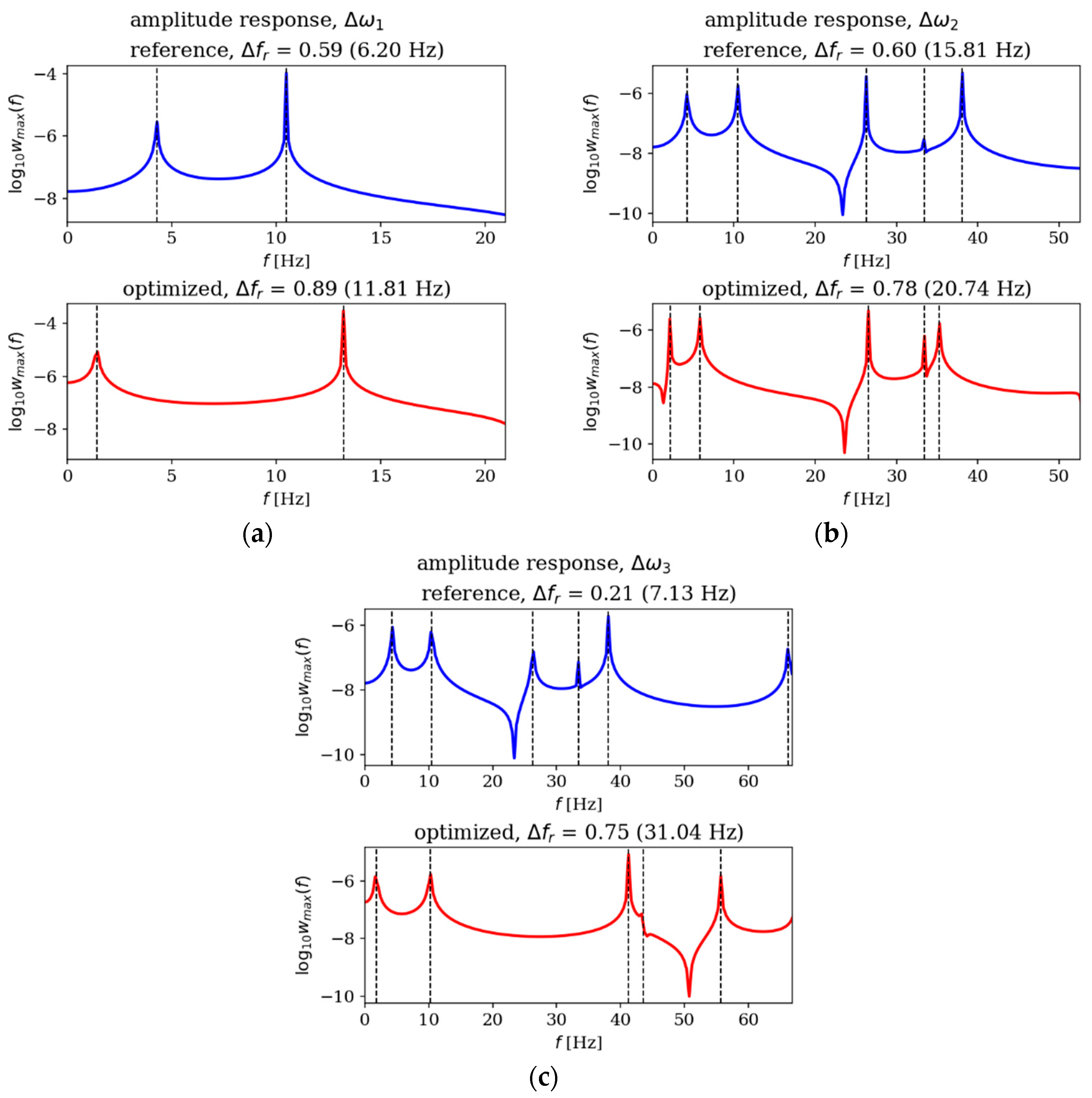
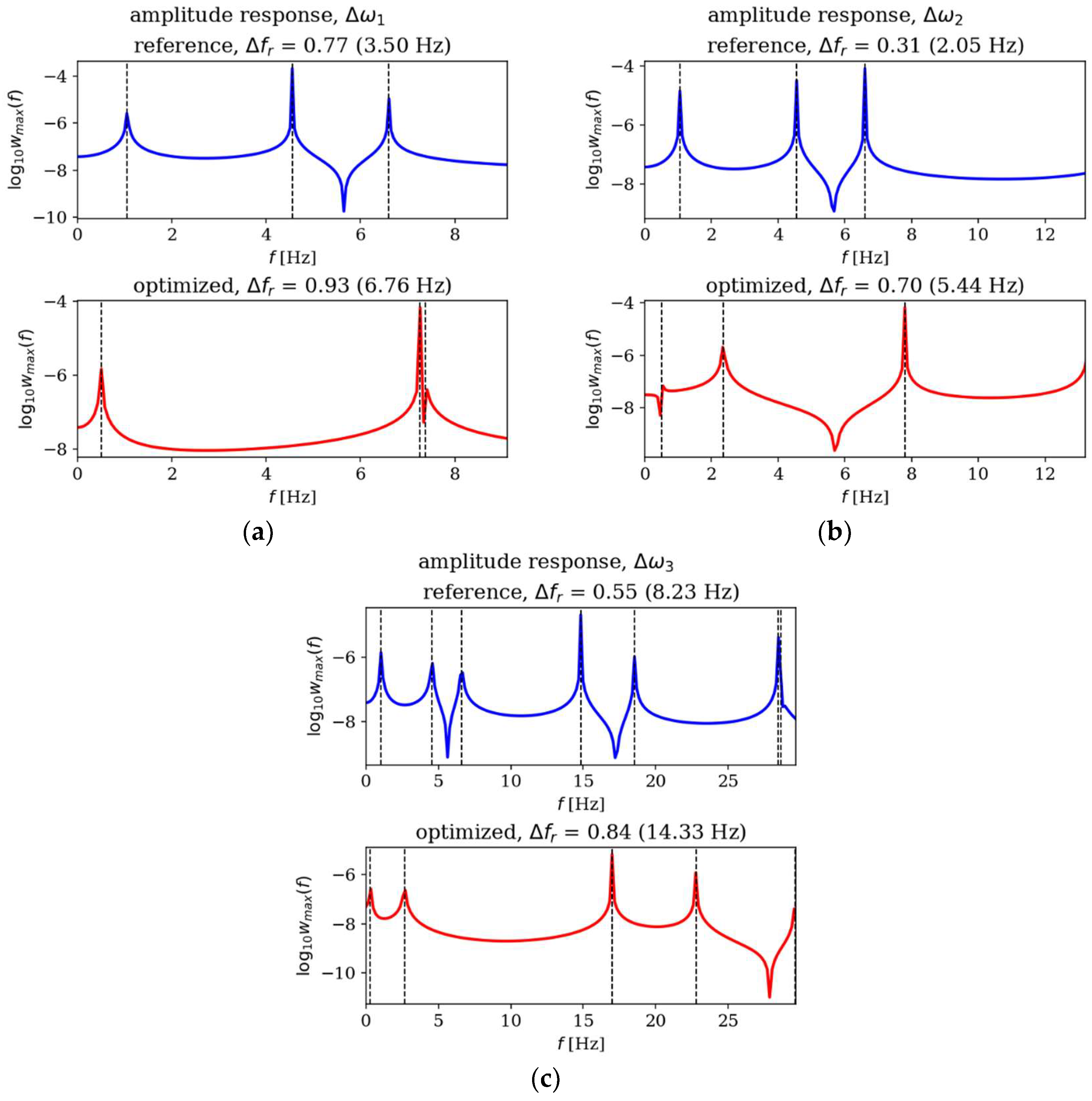
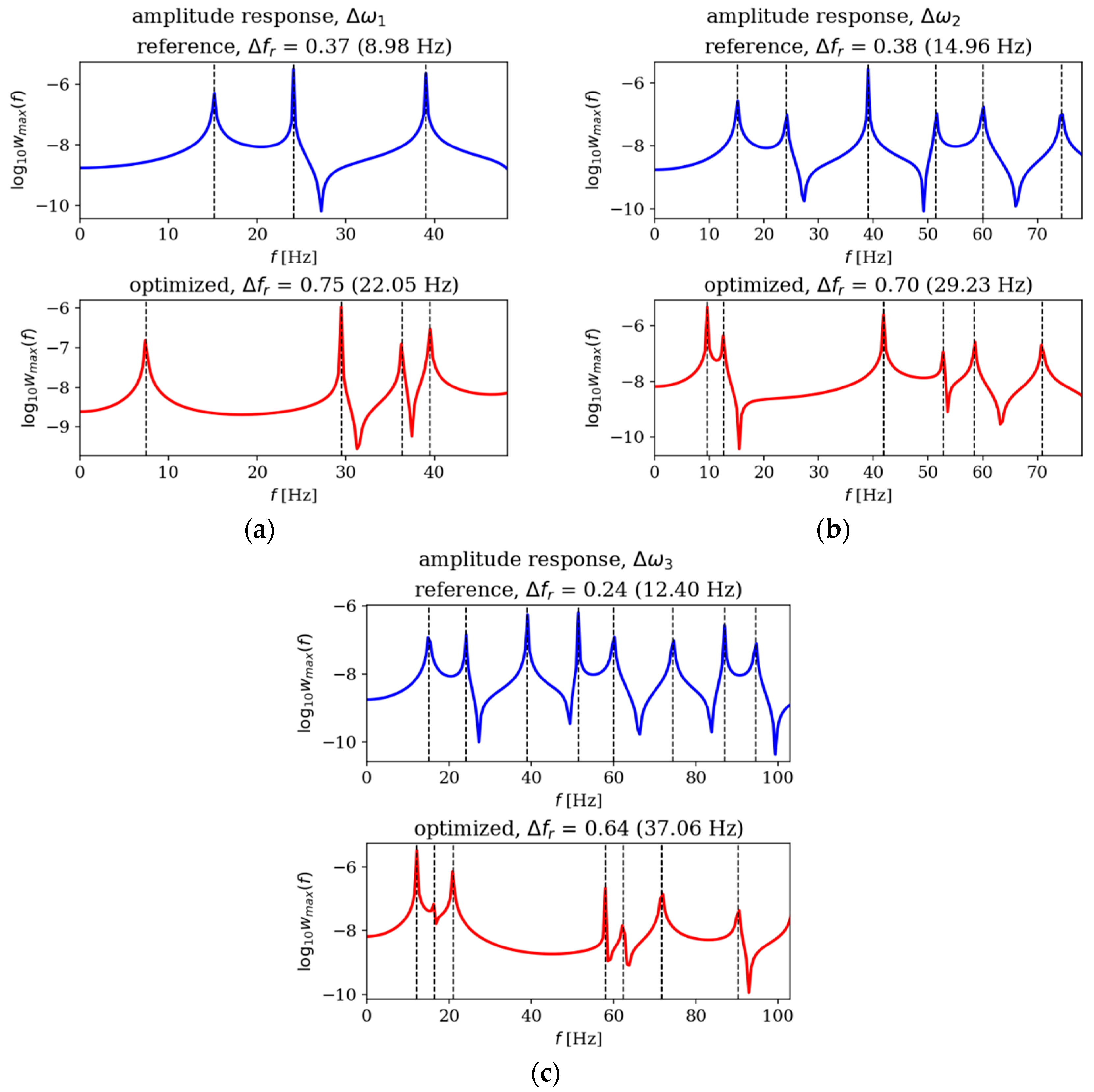
- The optimization process had a complex impact also on the amplitude response.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tushaj, E.; Lako, N. A review of structural size optimization techniques applied in the engineering design. Int. J. Sci. Eng. Res. 2017, 8, 706–714. [Google Scholar]
- Deepika, M.M.; Onkar, A.K. Multicriteria optimization of variable thickness plates using adaptive weighted sum method. Sādhanā 2021, 46, 82. [Google Scholar] [CrossRef]
- Xie, Q.; Xu, F.; Zou, Z.; Niu, X.; Dong, Z. Natural Frequency Analysis and Optimization Design of Rectangular Thin Plates With Nonlinear Variable-Thickness. Int. J. Acoust. Vib. 2022, 27, 367–381. [Google Scholar] [CrossRef]
- Banh, T.T.; Nguyen, X.Q.; Herrmann, M.; Filippou, F.C.; Lee, D. Multiphase material topology optimization of Mindlin-Reissner plate with nonlinear variable thickness and Winkler foundation. Steel Compos. Struct. 2020, 35, 129–145. [Google Scholar]
- Lurie, S.; Solyaev, Y.; Tambovtseva, E. On the topology optimization of variable-thickness fiber-reinforced plates. Math. Mech. Solids 2025. [Google Scholar] [CrossRef]
- Ko, K.Y.; Solyaev, Y. Explicit benchmark solution for topology optimization of variable-thickness plates. Math. Mech. Complex Syst. 2023, 11, 381–392. [Google Scholar] [CrossRef]
- Nguyen, M.N.; Bui, T.Q. Multi-material gradient-free proportional topology optimization analysis for plates with variable thickness. Struct. Multidiscip. Optim. 2022, 65, 75. [Google Scholar] [CrossRef]
- Kohn, R.V.; Vogelius, M. Thin Plates with Rapidly Varying Thickness, and their Relation to Structural Optimization. In Homogenization and Effective Moduli of Materials and Media; Springer: New York, NY, USA, 1986. [Google Scholar] [CrossRef]
- Moruzzi, M.C.; Cinefra, M.; Bagassi, S. Free vibration of variable-thickness plates via adaptive finite elements. J. Sound Vib. 2024, 577, 118336. [Google Scholar] [CrossRef]
- Zhou, Y.; Liu, W. Research on Vibration Control of Base Structure with Composite Variable-thickness Wave Absorbing Damping Plate. Res. Sq. 2024. [Google Scholar] [CrossRef]
- Banh, T.T.; Lee, D. Topology optimization of multi-directional variable thickness thin plate with multiple materials. Struct. Multidiscip. Optim. 2019, 59, 1503–1520. [Google Scholar] [CrossRef]
- Ma, H.A.; Liu, H.J.; Cong, Y.; Gu, S.T. Band gap study of periodic piezoelectric micro-composite laminated plates by finite element method and its application in feedback control. Mech. Mater. 2024, 195, 105029. [Google Scholar] [CrossRef]
- Cheng, S.L.; Li, X.D.; Zhang, Q.; Sun, Y.T.; Xin, Y.J.; Yan, Q.; Ding, Q.; Yan, H. Vibration attenuation and wave propagation analysis of 3D star-shaped resonant plate structures and their derivatives with ultra-wide band gap. Photonics Nanostruct. 2024, 61, 101289. [Google Scholar] [CrossRef]
- Li, X.; Li, H.; Jiang, X.; Liang, L. Experimental and numerical investigation on the vibro-acoustic characteristics of periodic rib stiffened plate based on band gap theory. J. Vib. Control 2024, 30, 3064–3076. [Google Scholar] [CrossRef]
- Faraci, D.; Comi, C.; Marigo, J.-J. Band Gaps in Metamaterial Plates: Asymptotic Homogenization and Bloch-Floquet Approaches. J. Elast. 2022, 148, 55–79. [Google Scholar] [CrossRef]
- Manconi, E.; Hvatov, A.; Sorokin, S.V. Numerical Analysis of Vibration Attenuation and Bandgaps in Radially Periodic Plates. J. Vib. Eng. Technol. 2023, 11, 2593–2603. [Google Scholar] [CrossRef]
- Degertekin, S.O.; Geem, Z.W. Metaheuristic Optimization in Structural Engineering. In Metaheuristics and Optimization in Civil Engineering; Springer: Berlin/Heidelberg, Germany, 2016; pp. 75–93. [Google Scholar]
- Bekdaş, G.; Nigdeli, S.M.; Kayabekir, A.E.; Yang, X.S. Optimization in Civil Engineering and Metaheuristic Algorithms: A Review of State-of-the-Art Developments. In Computational Intelligence, Optimization and Inverse Problems with Applications in Engineering; Springer International Publishing: Cham, Switzerland, 2019; pp. 111–137. [Google Scholar]
- Ghaemifard, S.; Ghannadiasl, A. Usages of metaheuristic algorithms in investigating civil infrastructure optimization models; a review. AI Civ. Eng. 2024, 3, 17. [Google Scholar] [CrossRef]
- Pyrz, M. Optimization of Variable Thickness Plates by Genetic Algorithms. Eng. Trans. 1998, 46, 115–129. [Google Scholar]
- Garambois, P.; Besset, S.; Jézéquel, L. Multi-objective structural optimization under stress criteria based on mixed plate fem and genetic algorithms. In Proceedings of the 5th International Conference on Computational Methods in Structural Dynamics and Earthquake Engineering (COMPDYN 2015), Crete Island, Greece, 25–27 May 2015; Institute of Structural Analysis and Antiseismic Research School of Civil Engineering National Technical University of Athens (NTUA) Greece: Athens, Greece, 2015; pp. 3545–3558. [Google Scholar]
- Zhou, N. Dynamic characteristics analysis and optimization for lateral plates of the vibration screen. J. Vibroengineering 2015, 17, 1593–1604. [Google Scholar]
- Pensupa, P.; Le, T.M.; Rungamornrat, J. An ANN-BCMO Approach for Material Distribution Optimization of Bi-Directional Functionally Graded Nanocomposite Plates with Geometrically Nonlinear Behaviors. Int. J. Comput. Methods 2024, 21, 2341010. [Google Scholar] [CrossRef]
- Raju, S.K. Metaheuristic Algorithms in Optimizing Structural Design of Bridges: A Review. Metaheuristic Optim. Rev. 2025, 3, 11–20. [Google Scholar]
- Chiba, R.; Kishida, T.; Seki, R.; Sato, S. Optimisation of material composition in functionally graded plates using a structure-tuned deep neural network. Int. J. Appl. Mech. Eng. 2024, 29, 78–95. [Google Scholar] [CrossRef]
- Bekdaş, G.; Nigdeli, S.M.; Yang, X.S. A novel bat algorithm based optimum tuning of mass dampers for improving the seismic safety of structures. Eng. Struct. 2018, 159, 89–98. [Google Scholar] [CrossRef]
- Nowacki, W. Dynamika Budowli; Państwowe Wydawnictwo Naukowe: Warszawa, Poland, 1966. [Google Scholar]
- Woźniak, C. Podstawy Dynamiki Ciał Odkształcalnych. I; Państwowe Wydawnictwo naukowe: Warszawa, Poland, 1969. [Google Scholar]
- Timoshenko, S.P.S.P.; Woinosky-Krieger, S. Theory of Plates and Shells, 2nd ed.; McGraw-Hill: New York, NY, USA, 1964. [Google Scholar]
- Ventsel, E.; Krauthammer, T. Thin Plates and Shells; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar] [CrossRef]
- Awrejcewicz, J.; Jemielita, G.; Kołakowski, Z.; Matysiak, S.J.; Nagórko, W.; Pietraszkiewicz, W.; Śniady, P.; Świtka, R.; Szafer, G.; Wągrowska, M.; et al. (Eds.) Mathematical Modelling and Analysis in Continuum Mechanics of Microstructured Media; Silesian University Press: Gliwice, Poland, 2010. [Google Scholar]
- Rakowski, G.; Kacprzyk, Z. Metoda Elementów Skończonych w Mechanice Konstrukcji (Finite Element Method in Structural Mechanics), 3rd ed.; Oficyna Wydawnicza Politechniki Warszawskiej: Warszawa, Poland, 2015. [Google Scholar]
- Greco, A.; D’Urso, D.; Cannizzaro, F.; Pluchino, A. Damage identification on spatial Timoshenko arches by means of genetic algorithms. Mech. Syst. Signal Process. 2018, 105, 51–67. [Google Scholar] [CrossRef]
- Joseph Shibu, K.; Shankar, K.; Kanna Babu, C.; Degaonkar, G.K. Multi-objective optimum design of an aero engine rotor system using hybrid genetic algorithm. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019. [Google Scholar] [CrossRef]
- Goldberg, D. Genetic Algorithms in Search, Optimization, and Machine Learning; Addison Wesley: Boston, MA, USA, 1989. [Google Scholar] [CrossRef]
- Gwiazda, T. Genetic Algorithms Reference. Volume I. Crossover for Single-Objective Numerical Optimization Problems; Wydawnictwo Naukowe PWN: Warszawa, Poland, 2007. [Google Scholar]
- Whitley, D. A genetic algorithm tutorial. Stat. Comput. 1994, 4, 65–85. [Google Scholar] [CrossRef]
- Michalewicz, Z. Genetic Algorithms + Data Structures = Evolution Programs; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lx × Ly = 1 × 1 | |||||
|---|---|---|---|---|---|
| K | The Individual | Plate CFFF | Plate SSSS | ||
| Δωk | Difference | Δωk | Difference | ||
| 1 | reference | 0.59 | 50.85% | 0.60 | 33.33% |
| optimized | 0.89 | 0.80 | |||
| 2 | reference | 0.60 | 30.00% | 0.00 | - |
| optimized | 0.78 | 0.58 | |||
| 3 | reference | 0.21 | 257.14% | 0.36 | 83.33% |
| optimized | 0.75 | 0.66 | |||
| Lx × Ly = 2 × 1 | |||||
|---|---|---|---|---|---|
| K | The Individual | Plate CFFF | Plate SSSS | ||
| Δωk | Difference | Δωk | Difference | ||
| 1 | reference | 0.77 | 20.78% | 0.37 | 102.70% |
| optimized | 0.93 | 0.75 | |||
| 2 | reference | 0.31 | 125.81% | 0.38 | 84.21% |
| optimized | 0.70 | 0.70 | |||
| 3 | reference | 0.55 | 52.73% | 0.24 | 166.67% |
| optimized | 0.84 | 0.64 | |||
| Lx × Ly = 1 × 1 | ||||||
|---|---|---|---|---|---|---|
| k | Plate CFFF | Plate SSSS | ||||
| Δωk | Difference | Δωk | Difference | |||
| GA | SciPy | GA | SciPy | |||
| 1 | 0.89 | 0.88 | 1.12% | 0.80 | 0.78 | 2.50% |
| 2 | 0.78 | 0.75 | 3.85% | 0.58 | 0.38 | 34.48% |
| 3 | 0.75 | 0.77 | 2.67% | 0.66 | 0.43 | 34.85% |
| Lx × Ly = 2 × 1 | ||||||
|---|---|---|---|---|---|---|
| k | Plate CFFF | Plate SSSS | ||||
| Δωk | Difference | Δωk | Difference | |||
| GA | SciPy | GA | SciPy | |||
| 1 | 0.93 | 0.89 | 4.30% | 0.75 | 0.74 | 1.33% |
| 2 | 0.70 | 0.69 | 1.43% | 0.70 | 0.70 | ≪1.00% |
| 3 | 0.84 | 0.77 | 8.33% | 0.64 | 0.62 | 3.13% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Domagalski, Ł.; Kowalczyk, I. Optimization and Analysis of Plates with a Variable Stiffness Distribution in Terms of Dynamic Properties. Materials 2025, 18, 2150. https://doi.org/10.3390/ma18092150
Domagalski Ł, Kowalczyk I. Optimization and Analysis of Plates with a Variable Stiffness Distribution in Terms of Dynamic Properties. Materials. 2025; 18(9):2150. https://doi.org/10.3390/ma18092150
Chicago/Turabian StyleDomagalski, Łukasz, and Izabela Kowalczyk. 2025. "Optimization and Analysis of Plates with a Variable Stiffness Distribution in Terms of Dynamic Properties" Materials 18, no. 9: 2150. https://doi.org/10.3390/ma18092150
APA StyleDomagalski, Ł., & Kowalczyk, I. (2025). Optimization and Analysis of Plates with a Variable Stiffness Distribution in Terms of Dynamic Properties. Materials, 18(9), 2150. https://doi.org/10.3390/ma18092150