

Deep Neural-Assisted Flexible MXene-Ag Composite Strain Sensor with Crack Dual Conductive Network for Human Motion Sensing

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Highlights
- The sensor combines silver nanoparticles and MXene in a multilevel microcrack structure (MAP), achieving high sensitivity (GFmax = 487.3), and rapid response (≈65 ms).
- Seamless sensor arrays monitor human activities without compromising comfort or biocompatibility.
- Deep learning boosts motion identification accuracy to 95%, advancing intelligent health-monitoring systems.
Abstract
1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Preparation of MXene
2.3. Preparation of PDMS
2.4. Fabrication of MAP Composite
2.5. Characteristics and FEM Simulation
3. Results and Discussion
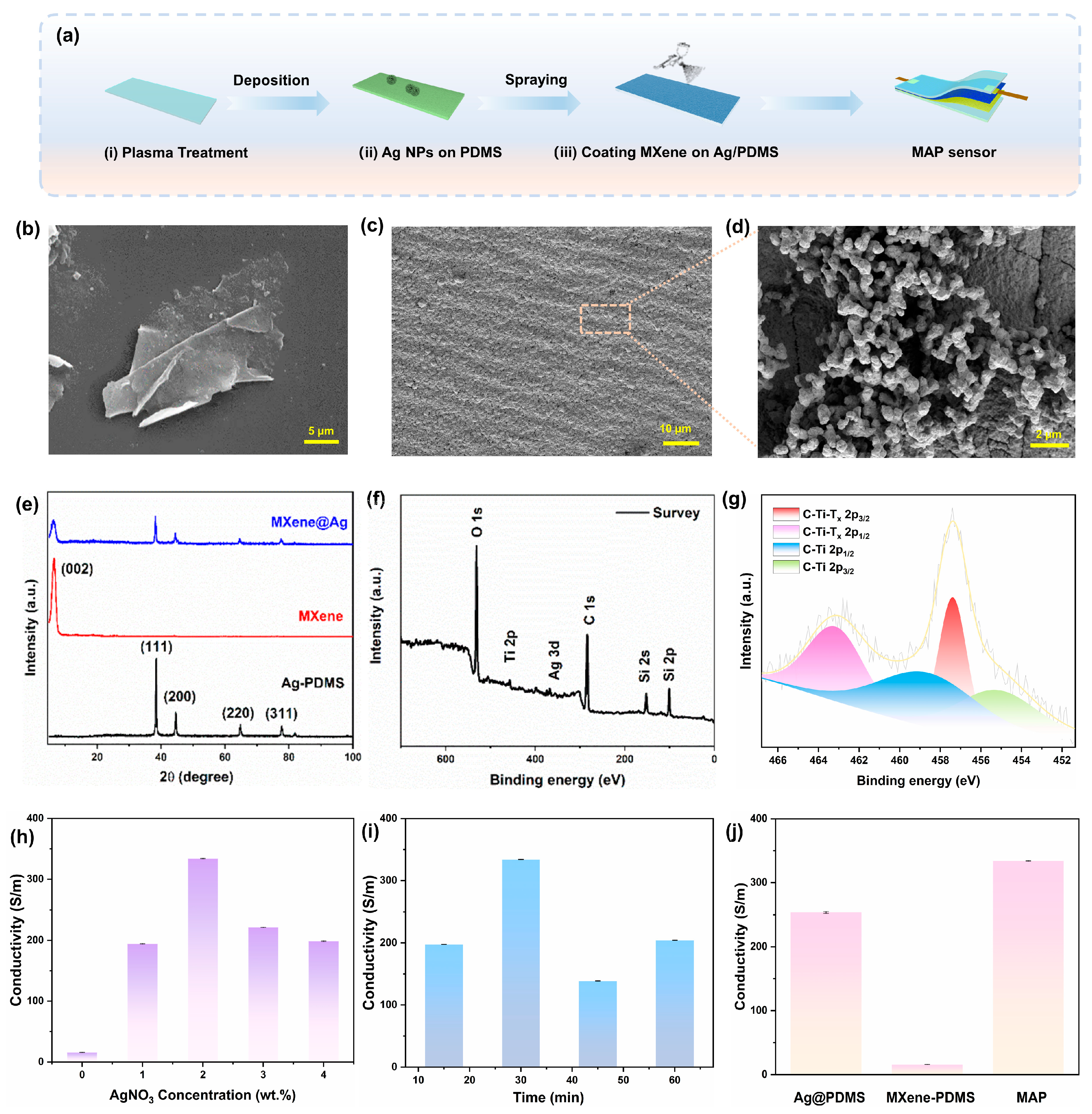
3.1. Morphological Structure and Sensing Properties of MAP Strain Sensor
3.2. Electromagnetic Interference Shielding and Self-Cleaning Properties of the MAP Strain Sensor
3.3. Application of Motion Sensing and Gesture Recognition with Deep Learning-Assisted Model
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, H.; Li, J.; Xiao, X.; Wang, J.; Li, Y.; Li, K.; Li, Z.; Yang, H.; Wang, Q.J.; Yang, J.S.; et al. Topographic Design in Wearable MXene Sensors with In-sensor Machine Learning for Full-body Avatar Reconstruction. Nat. Commun. 2022, 13, 5311. [Google Scholar] [CrossRef]
- Yu, Q.; Pan, J.; Jiang, Z.; Guo, Z.; Jiang, J. Stretchable Multimodal Textile Sensor Based on Core-sheath CB/PDMS/MXene Sensing Yarn for Efficiently Distinguishing Mechanical Stimulus. Chem. Eng. J. 2024, 493, 152462. [Google Scholar] [CrossRef]
- Caserman, P.; Garcia-Agundez, A.; Gobel, S. A Survey of Full-Body Motion Reconstruction in Immersive Virtual Reality Applications. IEEE Trans. Vis. Comput. Graph. 2020, 26, 3089–3108. [Google Scholar] [CrossRef]
- Jeong, H.; Kwak, S.S.; Sohn, S.; Lee, J.Y.; Lee, Y.J.; O’Brien, M.K.; Park, Y.R.; Avila, J.; Kim, T.; Yoo, J.Y.; et al. Miniaturized Wireless, Skin-Integrated Sensor Networks for Quantifying Full-body Movement Behaviors and Vital Signs in Infants. Proc. Natl. Acad. Sci. USA 2021, 118, e2104925118. [Google Scholar] [CrossRef]
- Guo, H.; Chu, Z.; Fu, L.; Lv, Y.; Liu, X.; Fan, X.; Zhang, W. Thickness-induced Gradient Micro-wrinkle PDMS/MXene/rGO Wearable Strain Sensor with High Sensitivity and Stretchability for Human Motion Detection. Chem. Eng. J. 2024, 495, 153684. [Google Scholar] [CrossRef]
- Wen, L.; Nie, M.; Chen, P.; Zhao, Y.N.; Shen, J.; Wang, C.; Xiong, Y.; Yin, K.; Sun, L. Wearable Multimode Sensor with a Seamless Integrated Structure for Recognition of Different Joint Motion States with the Assistance of a Deep Learning Algorithm. Microsyst. Nanoeng. 2022, 8, 24. [Google Scholar] [CrossRef]
- Hou, Y.; Wang, L.; Sun, R.; Zhang, Y.; Gu, M.; Zhu, Y.; Tong, Y.; Liu, X.; Wang, Z.; Xia, J.; et al. Crack-across-pore Enabled High-performance Flexible Pressure Sensors for Deep Neural Network Enhanced Sensing and Human Action Recognition. ACS Nano 2022, 16, 8358–8369. [Google Scholar] [CrossRef] [PubMed]
- Jia, M.; Yi, C.; Han, Y.; Wang, L.; Li, X.; Xu, G.; He, K.; Li, N.; Hou, Y.; Wang, Z.; et al. Hierarchical Network Enabled Flexible Textile Pressure Sensor with Ultrabroad Response Range and High-temperature Resistance. Adv. Sci. 2022, 9, e2105738. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.B.; Kim, J.Y.; Han, J.; Cho, Y.S. Strain Engineering in Power-generating and Self-powered Nanodevices. Nano Energy 2024, 125, 109551. [Google Scholar] [CrossRef]
- Liu, K.; Duan, T.; Zhang, F.; Tian, X.; Li, H.; Feng, M.; Wang, R.; Jiang, B.; Zhang, K. Flexible Electrode Materials for Emerging Electronics: Materials, Fabrication and Applications. J. Mater. Chem. A 2024, 12, 20606–20637. [Google Scholar] [CrossRef]
- Çavdar, Z.B.; Yanık, C.; Yıldırım, E.E.; Trabzon, L.; Karalar, T.C. Separated Terminal 2D Hall sensors with Improved Sensitivity. Sens. Actuators A 2021, 320, 112550. [Google Scholar] [CrossRef]
- Mohan, V.B.; Lau, K.; Hui, D.; Bhattacharyya, D. Graphene-based Materials and Their Composites: A Review on Production, Applications and Product Limitations. Compos. Part. B 2018, 142, 200–220. [Google Scholar] [CrossRef]
- Sun, B.; Wang, D.; Jiang, Y.; Wang, R.; Lyu, L.; Diao, G.; Zhang, W.; Pang, H. Cyclodextrin Metal-Organic Framework Functionalized Carbon Materials with Optimized Interface Electronics and Selective Supramolecular Channels for High-Performance Lithium-Sulfur Batteries. Adv. Mater. 2024, 36, 2415633. [Google Scholar] [CrossRef]
- Fan, S.-T.; Guo, D.-L.; Zhang, Y.-T.; Chen, T.; Li, B.-J.; Zhang, S. Washable and Stable Coaxial Electrospinning Fabric with Superior Electromagnetic Interference Shielding Performance for Multifunctional Electronics. Chem. Eng. J. 2024, 488, 151051. [Google Scholar] [CrossRef]
- Wu, C.; Peng, Y.; Wang, S.; Qiu, B.; Li, G.; Cao, Y.; Lai, W.-Y. Hierarchical Structural Design Towards Stretchable Strain Sensors with Ultra-high Sensitivity and Linearity. Sci. China Mater. 2024, 67, 2319–2328. [Google Scholar] [CrossRef]
- Wang, X.; Zheng, S.; Xiong, J.; Liu, Z.; Li, Q.; Li, W.; Yan, F. Stretch-induced Conductivity Enhancement in Highly Conductive and Tough Hydrogels. Adv. Mater. 2024, 36, e2313845. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, G.; Li, Z.; Zhang, W.; Meng, Q. Flexible Tactile Sensors with Biomimetic Microstructures: Mechanisms, Fabrication, and Applications. Adv. Colloid. Interface Sci. 2023, 320, 102988. [Google Scholar] [CrossRef]
- Zhao, S.; Ahn, J.-H. Rational Design of High-performance Wearable Tactile Sensors Utilizing Bioinspired Structures/Functions, Natural Biopolymers, and Biomimetic Strategies. Mater. Sci. Eng. R Rep. 2022, 148, 100672. [Google Scholar] [CrossRef]
- Li, Z.; Feng, D.; Li, B.; Zhao, W.; Xie, D.; Mei, Y.; Liu, P. Ultra-wide Range, High Sensitivity Piezoresistive Sensor Based on Triple Periodic Minimum Surface Construction. Small 2023, 19, e2301378. [Google Scholar] [CrossRef] [PubMed]
- Huang, L.; Liu, Y.; Li, G.; Song, Y.; Su, J.; Cheng, L.; Guo, W.; Zhao, G.; Shen, H.; Yan, Z.; et al. Ultrasensitive, Fast-responsive, Directional Airflow Sensing by Bioinspired Suspended Graphene Fibers. Nano Lett. 2023, 23, 597–605. [Google Scholar] [CrossRef]
- Li, S.; Yang, H.; Zhu, N.; Chen, G.; Miao, Y.; Zheng, J.; Cong, Y.; Chen, Y.; Gao, J.; Jian, X.; et al. Biotissue-inspired Anisotropic Carbon Fiber Composite Hydrogels for Logic Gates, Integrated Soft Actuators, and Sensors with Ultra-high Sensitivity. Adv. Funct. Mater. 2023, 33, 2211189. [Google Scholar] [CrossRef]
- Li, S.; Yang, H.; Chen, G.; Zheng, J.; Wang, W.; Ren, J.; Zhu, C.; Yang, Y.; Cong, Y.; Fu, J. 4D Printing of Biomimetic Anisotropic Self-sensing Hydrogel Actuators. Chem. Eng. J. 2023, 473, 145444. [Google Scholar] [CrossRef]
- Meng, X.; Zhang, C.; Xie, H.; Niu, S.; Han, Z.; Ren, L. A Continuous Pressure Positioning Sensor with Flexible Multilayer Structures Based on a Combinatorial Bionic Strategy. Adv. Funct. Mater. 2024, 34, 2314479. [Google Scholar] [CrossRef]
- Wang, M.; Lin, Z.; Ma, S.; Yu, Y.; Chen, B.; Liang, Y.; Ren, L. Composite Flexible Sensor Based on Bionic Microstructure to Simultaneously Monitor Pressure and Strain. Adv. Healthc. Mater. 2023, 12, e2301005. [Google Scholar] [CrossRef]
- Sun, Y.; Yang, Y.; Yao, D.; Gao, X.; Chen, J.; Wang, H.; You, T.; Dong, Y.; Lu, Y.; Lu, C.; et al. Biomimetic Multilayer Flexible Sensors for Multifunctional Underwater Sensing. Chem. Eng. J. 2024, 492, 152273. [Google Scholar] [CrossRef]
- del Bosque, A.; Sánchez–Romate, X.F.; Patrizi, D.; del Río Sáez, J.S.; Wang, D.-Y.; Sánchez, M.; Ureña, A. Ultrasensitive flexible strain sensors based on graphene nanoplatelets doped poly(ethylene glycol) diglycidyl ether: Mask breathing monitoring for the Internet of Things. Sens. Actuators A Phys. 2023, 358, 114448. [Google Scholar] [CrossRef]
- Mahato, R.; Masiul Islam, S.; Singh, S. Flexible piezo-resistive strain sensors based on silver nanowires and graphene nanoplatelets reinforced polydimethylsiloxane for human motion detection. Mater. Today Commun. 2024, 40, 110056. [Google Scholar] [CrossRef]
- Niu, S.; Chang, X.; Zhu, Z.; Qin, Z.; Li, J.; Jiang, Y.; Wang, D.; Yang, C.; Gao, Y.; Sun, S. Low-Temperature Wearable Strain Sensor Based on a Silver Nanowires/Graphene Composite with a Near-Zero Temperature Coefficient of Resistance. ACS Appl. Mater. Interfaces 2021, 13, 55307–55318. [Google Scholar] [CrossRef]
- Lu, H.; Chen, B.; Lai, X.; Li, H.; Zeng, X. Porous reduced graphene oxide@multi-walled carbon nanotubes/polydimethylsiloxane piezoresistive pressure sensor for human motion detection. Mater. Today Nano 2024, 28, 100512. [Google Scholar] [CrossRef]
- Bosque, A.d.; Sánchez-Romate, X.F.; Sánchez, M.; Ureña, A. Ultrasensitive and highly stretchable sensors for human motion monitoring made of graphene reinforced polydimethylsiloxane: Electromechanical and complex impedance sensing performance. Carbon 2022, 192, 234–248. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, X.; Zhang, H.; Xu, L.; Wang, D.; Lu, X.; Zhang, A. Semi-embedded Robust MXene/AgNW Sensor with Self-healing, High Sensitivity and A Wide Range for Motion Detection. Chem. Eng. J. 2022, 434, 134751. [Google Scholar] [CrossRef]
- Peng, J.; Ge, F.; Han, W.; Wu, T.; Tang, J.; Li, Y.; Wang, C. MXene-based Thermoelectric Fabric Integrated with Temperature and Strain Sensing for Health Monitoring. J. Mater. Sci. Technol. 2025, 212, 272–280. [Google Scholar] [CrossRef]
- Bian, X.; Yang, Z.; Zhang, T.; Yu, J.; Xu, G.; Chen, A.; He, Q.; Pan, J. Multifunctional Flexible AgNW/MXene/PDMS Composite Films for Efficient Electromagnetic Interference Shielding and Strain Sensing. ACS Appl. Mater. Interfaces 2023, 15, 41906–41915. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.S.; Wang, T.; Bao, Z.L.; Qian, P.F.; Liu, X.C.; Geng, W.H.; Zhang, D.; Wang, S.W.; Zhu, Q.; Geng, H.Z. MXene and AgNW Based Flexible Transparent Conductive Films with Sandwich Structure for High-performance EMI Shielding and Electrical Heaters. J. Colloid. Interface Sci. 2024, 665, 376–388. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Cao, W.; Liu, Z.; Zhang, Y.; Chen, Z.; Zheng, X. A Personalized Electronic Textile for Ultrasensitive Pressure Sensing Enabled by Biocompatible MXene/PEDOT:PSS Composite. Carbon Energy 2024, 6, e530. [Google Scholar] [CrossRef]
- Qin, Z.; Zhao, G.; Zhang, Y.; Gu, Z.; Tang, Y.; Aladejana, J.T.; Ren, J.; Jiang, Y.; Guo, Z.; Peng, X.; et al. A Simple and Effective Physical Ball-milling Strategy to Prepare Super-tough and Stretchable PVA@MXene@PPy Hydrogel for Flexible Capacitive Electronics. Small 2023, 19, e2303038. [Google Scholar] [CrossRef]
- Wang, P.; Liu, G.; Sun, G.; Meng, C.; Shen, G.; Li, Y. An Integrated Bifunctional Pressure-temperature Sensing System Fabricated on a Breathable Nanofiber and Powered by Rechargeable Zinc-Air Battery for Long-term Comfortable Health Care Monitoring. Adv. Fiber Mater. 2024, 6, 1037–1052. [Google Scholar] [CrossRef]
- Guo, F.; Ren, Z.; Xie, Y.; Huang, H.; Wang, S.; Cheng, S. Leaf-inspired Flexible NFMs with Multi-conductive Network for Multifunctional Integrated Physical Sensing, Joule Heating, and Noncontact Thermosensation. Chem. Eng. J. 2024, 495, 153485. [Google Scholar] [CrossRef]
- Li, W.; Zhou, T.; Zhang, Z.; Li, L.; Lian, W.; Wang, Y.; Lu, J.; Yan, J.; Wang, H.; Wei, L.; et al. Ultrastrong MXene Film Induced by Sequential Bridging with Liquid Metal. Science 2024, 385, 62–68. [Google Scholar] [CrossRef]
- Zheng, X.; Zhang, S.; Zhou, M.; Lu, H.; Guo, S.; Zhang, Y.; Li, C.; Tan, S.C. Injectable Shear-thinning Hydrogels with Sclerosing and Matrix Metalloproteinase Modulatory Properties for the Treatment of Vascular Malformations. Adv. Funct. Mater. 2023, 33, 2214880. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, D.; Zhou, H.; Xiang, D.; Sun, H.; Chen, C.; Li, D.; Wu, Y.; Fu, Q.; Deng, H. A Novel Strategy to Prepare High Performance Multifunctional Composite Films by Combining Electrostatic Assembly, Crosslinking, Topology Enhancement and Sintering. Mater. Horiz. 2024, 11, 4190–4200. [Google Scholar] [CrossRef] [PubMed]
- Wei, L.; Ren, Y.; Hou, Y.; Jin, P.; Zheng, Y.; Wu, Z. Mxene/Nanocellulose/Carbon Sphere Composite Films with a Multistage “Egg-Box” Structure for Electromagnetic-Interference Shielding and Pressure Sensors. J. Mater. Chem. A 2025, 13, 8876–8889. [Google Scholar] [CrossRef]
- Zhao, W.; Trung, V.; Li, H.; Natsuki, J.; Tan, J.; Yang, W.; Natsuki, T. Enhanced Functionalization of Nonwoven Fabric by Spray Coating AgNPs/CNTs Solution Prepared by a One-Step Method. Chem. Eng. J. 2024, 494, 153101. [Google Scholar] [CrossRef]
- Cheng, Y.; Xie, Y.; Liu, Z.; Yan, S.; Ma, Y.; Yue, Y.; Wang, J.; Gao, Y.; Li, L. Maximizing Electron Channels Enabled by MXene Aerogel for High-performance Self-healable Flexible Electronic Skin. ACS Nano 2023, 17, 1393–1402. [Google Scholar] [CrossRef]
- Naguib, M.; Kurtoglu, M.; Presser, V.; Lu, J.; Niu, J.; Heon, M.; Hultman, L.; Gogotsi, Y.; Barsoum, M.W. Two-dimensional Nanocrystals Produced by Exfoliation of Ti3AlC2. Adv. Mater. 2011, 23, 4248–4253. [Google Scholar] [CrossRef]
- Xiang, J.; Wang, X.; Ding, M.; Tang, X.; Zhang, S.; Zhang, X.; Xie, Z. The Role of Lateral Size of MXene Nanosheets in Membrane Filtration of Dyeing Wastewater: Membrane Characteristic and Performance. Chemosphere 2022, 294, 133728. [Google Scholar] [CrossRef]
- Loupias, L.; Morais, C.; Morisset, S.; Canaff, C.; Li, Z.; Brette, F.; Chartier, P.; Guignard, N.; Maziere, L.; Mauchamp, V.; et al. Guideline for Synthesis and Surface Chemistry Characterization of 2D Mo/Ti Solid Solutions Based MXene. Application to Hydrogen Evolution Reaction in Alkaline Media. FlatChem 2024, 43, 100596. [Google Scholar] [CrossRef]
- Kareem, F.; Rizwan, M.; Ahmed, M. A Novel Label-free Electrochemical Immunosensor Based on DCNC@AgNPs/MXene for The Detection of Apolipoprotein A-1 in Human Serum. Electrochim. Acta 2024, 474, 143536. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, L.; Wang, N.; Li, C. Highly Stretchable and Transparent Triboelectric Nanogenerator Based on Multilayer Structured Stable Electrode for Self-powered Wearable Sensor. Nano Energy 2020, 78, 105385. [Google Scholar] [CrossRef]
- Wang, T.; Qiu, Z.; Li, H.; Lu, H.; Gu, Y.; Zhu, S.; Liu, G.S.; Yang, B.R. High Sensitivity, Wide Linear-range Strain Sensor Based on MXene/AgNW Composite Film with Hierarchical Microcrack. Small 2023, 19, e2304033. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Liu, L.X.; Zhang, H.B.; Yu, Z.Z. Flexible, Transparent, and Conductive Ti3C2Tx MXene-Silver Nanowire Films with Smart Acoustic Sensitivity for High-Performance Electromagnetic Interference Shielding. ACS Nano 2020, 14, 16643–16653. [Google Scholar] [CrossRef]
- Liu, L.; Zheng, S.; Chen, H.; Cai, J.; Zang, S. Tandem Nitrate-to-Ammonia Conversion on Atomically Precise Silver Nanocluster/MXene Electrocatalyst. Angew. Inter. Edi. Chem. 2024, 63, e202316910. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, L.; Burggen, B.; Leung, M.; Yang, F. A Free-standing 3D Nano-Composite Photo-Electrode-Ag/ZnO Nanorods Arrays on Ni Foam Effectively Degrade Berberine. Chem. Eng. J. 2019, 373, 179–191. [Google Scholar] [CrossRef]
- Tian, W.; VahidMohammadi, A.; Reid, M.S.; Wang, Z.L.; Ouyang, J.; Erlandsson, T.; Pettersson, L.; Wagberg, M.; Hamedi, M.M. Multifunctional Nanocomposites with High Strength and Capacitance Using 2D MXene and 1D Nanocellulose. Adv. Mater. 2019, 31, e1902977. [Google Scholar] [CrossRef] [PubMed]
- del Bosque, A.; Sánchez-Romate, X.F.; Cadini, F.; Sbarufatti, C.; Sánchez, M.; Giglio, M.; Ureña, A. Dual effect of temperature and strain on the electrical response of highly sensitive silicone elastomers doped with graphene nanoplatelets. Polymer 2023, 286, 126419. [Google Scholar] [CrossRef]
- Wu, J.; Ma, Z.; Hao, Z.; Zhang, J.T.; Sun, P.; Zhang, M.; Liu, Y.; Cheng, Y.; Li, Y.; Zhong, B.; et al. Sheath-Core Fiber Strain Sensors Driven by in-Situ Crack and Elastic Effects in Graphite Nanoplate Composites. ACS Appl. Nano Mater. 2019, 2, 750–759. [Google Scholar] [CrossRef]
- del Bosque, A.; Sánchez-Romate, X.F.; Calvo, D.; Sánchez, M.; Ureña, A. Mechanical and sensing performance under hydrothermal ageing of wearable sensors made of polydimethylsiloxane with graphitic nanofillers. Polym. Degrad. Stab. 2023, 209, 110278. [Google Scholar] [CrossRef]
- Dong, J.; Tang, X.; Peng, Y.; Fan, C.; Li, L.; Zhang, C.; Lai, F.; He, G.; Ma, P.; Wang, Z.; et al. Highly Permeable and Ultrastretchable E-textiles with EGaIn-superlyophilicity for on-skin Health Monitoring, Joule Heating, and Electromagnetic Shielding. Nano Energy 2023, 108, 108194. [Google Scholar] [CrossRef]
- Wang, L.; Ma, Z.; Qiu, H.; Zhang, Y.; Yu, Z.; Gu, J. Significantly Enhanced Electromagnetic Interference Shielding Performances of Epoxy Nanocomposites with Long-range Aligned Lamellar Structures. Nano-Micro Lett. 2022, 14, 224. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Y.; Wu, N.; Han, M.; Liu, W.; Liu, J.; Zeng, Z. Diverse Structural Design Strategies of MXene-based Macrostructure for High-performance Electromagnetic Interference Shielding. Nano-Micro Lett. 2023, 15, 240. [Google Scholar] [CrossRef]
- Zhao, P.; Song, Y.; Xie, P.; Zhang, F.; Xie, T.; Liu, G.; Zhao, J.; Han, S.-T.; Zhou, Y. All-organic Smart Textile Sensor for Deep-learning-assisted Multimodal Sensing. Adv. Funct. Mater. 2023, 33, 2301816. [Google Scholar] [CrossRef]
- Hou, Y.; Gao, M.; Gao, J.; Zhao, L.; Teo, E.H.T.; Wang, D.; Qi, H.J.; Zhou, K. 3D Printed Conformal Strain and Humidity Sensors for Human Motion Prediction and Health Monitoring via Machine Learning. Adv. Sci. 2023, 10, 2304132. [Google Scholar] [CrossRef] [PubMed]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, J.; Xia, Z.; Zhong, H.; Ding, X.; Lai, Y.; Li, S.; Zhang, M.; Wang, M.; Zhang, Y.; Huang, G.; et al. Deep Neural-Assisted Flexible MXene-Ag Composite Strain Sensor with Crack Dual Conductive Network for Human Motion Sensing. Materials 2025, 18, 3537. https://doi.org/10.3390/ma18153537
Fu J, Xia Z, Zhong H, Ding X, Lai Y, Li S, Zhang M, Wang M, Zhang Y, Huang G, et al. Deep Neural-Assisted Flexible MXene-Ag Composite Strain Sensor with Crack Dual Conductive Network for Human Motion Sensing. Materials. 2025; 18(15):3537. https://doi.org/10.3390/ma18153537
Chicago/Turabian StyleFu, Junheng, Zichen Xia, Haili Zhong, Xiangmou Ding, Yijie Lai, Sisi Li, Mengjie Zhang, Minxia Wang, Yuhao Zhang, Gangjin Huang, and et al. 2025. "Deep Neural-Assisted Flexible MXene-Ag Composite Strain Sensor with Crack Dual Conductive Network for Human Motion Sensing" Materials 18, no. 15: 3537. https://doi.org/10.3390/ma18153537
APA StyleFu, J., Xia, Z., Zhong, H., Ding, X., Lai, Y., Li, S., Zhang, M., Wang, M., Zhang, Y., Huang, G., Zhan, F., Liang, S., Zeng, Y., Wang, L., & Zhao, Y. (2025). Deep Neural-Assisted Flexible MXene-Ag Composite Strain Sensor with Crack Dual Conductive Network for Human Motion Sensing. Materials, 18(15), 3537. https://doi.org/10.3390/ma18153537