1. Introduction
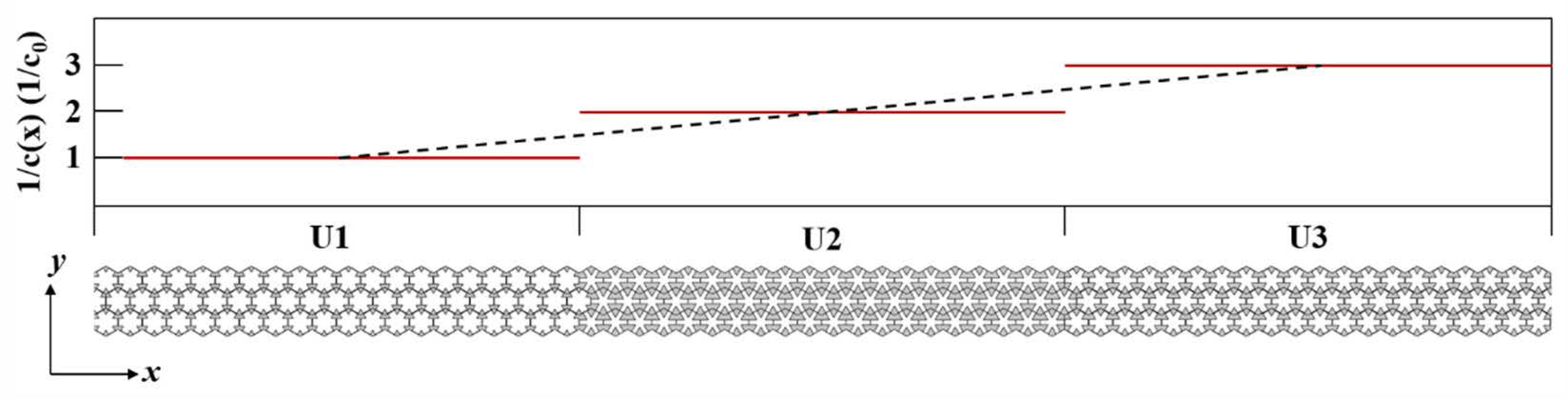
As an artificial structure with sub-wavelength scale, the acoustic metasurface can accurately control the acoustic propagation behavior through discrete phase modulation. The design principle is to discretize the continuous phase gradient into periodically arranged functional units and to then use the phase difference between the units to construct the equivalent refractive index gradient, thus breaking the limitations of Snell’s law and realizing broadband acoustic wave reflection deflection [
1], unidirectional transmission [
2], and ultrasonic focusing [
3].
Veselago [
4] first theoretically elucidated the fundamentals of negative refractive index materials, laying a theoretical foundation for artificially modulating fluctuating physical fields. Cummer [
5] subsequently provided a comprehensive review of acoustic metamaterials, systematically categorizing recent advances in zero/negative refraction, cloaking, and wavefront engineering. Addressing broadband absorption requirements, Trematerra and Bevilacqua [
6] achieved multi-band attenuation through honeycomb-porous hybrid structures, and their geometric parameter sensitivity analysis informed the resonator design. Then, the feasibility of attaining broadband acoustic functionality through multiple resonant units was demonstrated by the local multi-resonant metamaterials of related multi-resonant scatterers [
7]. Li et al. [
8] applied the generalized Snell’s law to acoustics for the first time. By combining the folded acoustic channel with the phase gradient design, the phase gradient in the interface direction was constructed to realize the acoustic functions, such as the plane-to-surface wave conversion, anomalous deflection, and focusing, etc. It also experimentally verified the feasibility of it [
9]. Subsequently, Tian et al. [
10] designed a frequency-independent metasurface based on a pentamode material, which is capable of simultaneous generation of Bessel beams and conversion of multiple wave types over a wide frequency band. Zhang et al.’s [
11] bandgap engineering theory for resonant metasurfaces establishes a multiscale design paradigm for broadband acoustic devices. Pioneering work by Li et al. [
12] introduced geometric asymmetry-induced Willis coupling, creating non-reciprocal wave propagation mechanisms that expand metamaterial functionality. Notably, the emergence of field-responsive metamaterials [
13,
14,
15] (electro/magneto/thermal-tunable systems) offers crucial technical references for developing our tunable gradient metasurfaces. These studies laid the foundation for acoustic metasurface design and led to the expansion of functionality.
The traditional design process of metasurfaces usually relies on repeated iterations of simulation and optimization, which is a typical “trial-and-error” design method. As the study of acoustic hypersurfaces has continued, the limitations of localized cell design of hypersurfaces through the generalized Snell’s law have been gradually recognized, and researchers have proposed a variety of new design ideas. Level set topology optimization methods based on two-scale homogenization [
16], machine learning methods [
17], global optimization strategies [
18], and coded acoustic hypersurfaces [
19] have been studied.
On the other hand, various kinds of numerical and intelligent algorithms have been continuously applied to acoustic metasurface optimization. Gao et al. [
20] optimized the geometry of the labyrinth absorber by genetic algorithm (GA) to achieve ultra-thin and wide bandwidth absorption. Mohamadjavad [
21] used GA to optimize the structural parameters related to mass configuration to achieve maximum acoustic attenuation and to widen the band gap. Gong [
22] used Taboo GA to optimize the arrangement order of structural units controlling different foci in acoustic metasurfaces and achieved a good focusing effect after optimization. Yan et al. [
23] used particle swarm optimization (PSO) to optimize the parameters of honeycomb microperforated plates to obtain wide-angle and low-frequency acoustic absorption characteristics. Shah et al. [
24] used the dual-depth Q-learning network and the depth deterministic strategy gradient algorithm to optimize the metamaterials design. Compared with the advanced optimization algorithm using the fmincon function, the design of the reinforcement learning algorithm performed well. Peng [
25] used Kriging and NSGA-II algorithms to achieve multi-objective sound insulation optimization of low-frequency membrane-type metasurfaces and successfully designed acoustic metamaterial structures with specific sound insulation frequencies and bandwidths. Liu [
26] et al. proposed a deep neural network model based on hyperparameter optimization to predict the acoustic performance of a multi-dimensional Helmholtz resonator. Zhao et al. [
27] critically evaluated machine learning applications in metamaterial inverse design, with their feature mapping models directly informing our algorithmic architecture. The data-driven optimization strategy by Wang et al. [
28] complements our hybrid optimization framework in parameter sensitivity analysis. Liang et al. [
29] proposed a demand-driven inverse design and optimization method based on the integration of multiple algorithms for ultra-thin broadband acoustic absorptive metamaterials, which accomplished the fast and precise customization of ultra-thin broadband acoustic absorptive properties and provided a highly efficient solution for real-time/on-demand metamaterial design. Zhou et al. [
30] proposed a continuous parameterization method based on level set functions to optimize the cell distribution of hypersurface arrays without gradient information for multi-objective optimization of bandpass reflection and diffuse scattering. Lee et al. [
31] demonstrated a 20% enhancement in passband absorption through genetically algorithm-optimized functionally graded metamaterials, validating the need for multi-unit synergy. Morris [
18] et al. used genetic algorithms to optimize the geometric variables of metamaterials, mapping geometric parameters to equivalent mass/stiffness parameters through a reduced-order model, significantly reducing computational time, and achieving efficient optimization of high-dimensional metamaterial design.
Although significant progress has been made in enhancing specific functions of metasurfaces (e.g., focusing, acoustic absorption, or unidirectional transmission), there are still few system optimizations focusing on the uniformity of diffuse reflection; in addition, there is a lack of integrated evaluation and efficient solutions of uniformity indicators, such as scattering standard deviation or mean square error, as well as a lack of analysis on the sensitivity of the initial layout and robustness of the algorithm. Diffusers can be used to propagate reflected waves in all directions, reducing the intensity of unwanted specular reflections and echoes. It can improve the reliability of underwater communication and sonar systems to optimize underwater acoustic stealth technology. To avoid the use of randomly distributed or geometrically reflective metasurfaces, a combined optimization framework of TOA and GD is proposed in this paper, which was used to optimize the uniformity of the diffuse reflection field. First, the adaptive perturbation of TOA with the Metropolis acceptance criterion was utilized to perform global search in the discrete reflection angles space, which can not only jump out of the local minimum, but also ensure rapid convergence to the global optimal region. Then, the reflection angle of each element was adjusted enumeratively by discrete gradient descent to improve the local accuracy and further reduce the standard deviation of the far-field sound pressure level. This method combines the global exploration capability and local fine-tuning performance, which can significantly improve the diffuse reflective field uniformity, as well as provides a feasible solution for acoustic metasurfaces to achieve highly robust diffuse reflective design in complex environments.
3. Algorithm Design
Optimal scheduling of reflection angles for acoustic metasurfaces is essentially a high-dimensional discrete combinatorial optimization problem whose solution space grows exponentially with the number of cells. In metasurface design, especially the discrete reflection angle optimization problem, single heuristic algorithms (e.g., genetic algorithm, particle swarm optimization, etc.) are prone to local optima, while pure gradient-based approaches rely heavily on initial solution quality and struggle with discrete variables, resulting in a trade-off between optimization accuracy and efficiency. To overcome these limitations, this study proposes a hybrid optimization framework (VDGD) that integrates the TOA and discrete gradient descent, which uniquely combines global stochastic exploration with local fine tuning to address the high-dimensional non-convex optimization challenges in enhancing the diffuse reflection uniformity of acoustic metasurfaces. First, the global perturbation mechanism of TOA, which has adaptive perturbation amplitude and the Metropolis acceptance criterion, is utilized to avoid the local minima in the discrete solution space and significantly improve the global search capability. Subsequently, a discrete gradient descent is performed by enumerating finite sets of discrete reflection angles for localized refinement within globally identified regions. Through this global–local synergy, VDGD can effectively balance the search width and optimization accuracy to achieve excellent scattering uniformity and algorithmic robustness. The specific operation flow of each stage will be described in detail, and its algorithmic framework is shown in
Figure 4.
In the global search phase, an initial reflection angle distribution vector , whose components are from the set Φ, is randomly generated and used to initiate the search process. An objective function value, which is a metric reflecting the uniformity of the sound pressure distribution (standard deviation σ), is computed for the generated initial solution and serves as a benchmark for subsequent optimization. In each iteration, one or more cells are randomly selected from the current solution S, and the corresponding reflection angles are replaced with other allowable angles to generate a new candidate solution S ∗. This perturbation operation is similar to the “tornado” effect, where the design variables are partially randomly perturbed to broaden the solution search range while maintaining the feasibility of the solution. Then, the objective function values σ and σ ∗ of the current solution and candidate solutions are computed separately and updated according to the Metropolis acceptance criterion. If σ* < σ, the candidate solution is accepted directly; otherwise, the candidate solution is accepted with the probability , where R = R0 exp(-iter/Niter) is the perturbation factor for stepwise decay and iter is the current iteration number. After updating the current solution, check whether the change in the objective function in 500 consecutive iterations is lower than the preset threshold ϵ = 0.1% or whether the maximum number of iterations is reached. If either condition is satisfied, the global search is stopped, and the current optimal solution is output as the global result. Through this global search phase, the algorithm can freely explore the solution space in a large range, effectively avoiding early local optimization and providing a better starting solution for subsequent local fine tuning.
The optimal solution S obtained from the global search is used as the initial input after entering the local fine-tuning phase. The purpose of this stage is to fine tune the reflection angle of each metasurface element to further reduce the objective function value. For each cell i in the design vector , the local neighborhood of the unit is constructed. For each candidate angle θ∈, construct a new design vector (θ) and compute the corresponding objective function value (θ). Determine the angle that minimizes the objective function value, , and update the corresponding component in the current design vector. If all the candidate angles fail to reduce the objective function value, keep the original value unchanged. Check whether there still exists a cell that can bring down the objective function after completing a local traversal of all cells. Continue the iteration if available; otherwise, the local fine-tuning phase is considered to have converged and the local search is ended. Since the design variables are discrete, it is difficult to directly use continuous gradient descent. Therefore, the local fine tuning traverses the neighborhood candidate solutions by enumerating, which is equivalent to the discrete gradient descent. The method ensures a meticulous search in the neighborhood of the current solution, resulting in a continuously decreasing objective function. Combined with the better initial solution provided by the global search, local fine tuning can quickly achieve a lower objective function value than the global search to improve the overall optimization accuracy and stability.
4. Experimental Validation and Result Analysis
To validate the effectiveness of the VDGD algorithm, the experimental verification was systematically conducted in three stages (ensuring comprehensive and rigorous conclusions): basic diffuse reflection comparison, COMSOL simulation (In this paper, COMSOL Multiphysics 6.1 is used for numerical simulation verification.) verification, and multi-algorithm performance evaluation.
Firstly, a basic diffuse comparison was performed. To evaluate the VDGD algorithm’s capability in optimizing diffuse reflection uniformity, four scenarios were designed: without metasurface, randomly initialized metasurface, TOA-optimized metasurface, and VDGD-optimized metasurface. In this study, a one-dimensional metasurface, which contained a total of N = 30 metasurface units, was used as an example. The reflection angle of each unit was selected from the predefined set . The metasurface was used in water (sound speed c = 1500 m/s, frequency f = 3000 Hz) with the following parameters: maximum number of TOA iterations Kmax = 500, initial perturbation amplitude R0 = 0.25 × N, convergence threshold ϵ = 1 × 10−3, maximum number of GD iterations KGD = 100, learning rate αGD = 0.05, and initial value of annealing temperature T0 = 2σ0 (where σ0 is the initial standard deviation). All numerical experiments were conducted on a workstation equipped with an NVIDIA GeForce GTX 4090 GPU and a 13th Gen Intel Core i7-13700 KF CPU. The optimization process was implemented on MATLAB R2023a with the Global Optimization Toolbox (v4.8) and Parallel Computing Toolbox (v7.6) for algorithm validation. Specifically, the Global Optimization Toolbox provided built-in functions for GA and PSO (e.g., ga, particleswarm, etc.), which support constraint conditions for discrete reflection angle sets. The Parallel Computing Toolbox accelerated the execution of 10 independent experiments through a multi-threaded framework (parfor loop). For the TOA and GD stages, custom scripts were developed using MATLAB’s native functions, including fmincon (nonlinear constrained optimization) and patternsearch (pattern search algorithm), thereby ensuring compatibility with discrete variable optimization and efficient global–local collaboration.
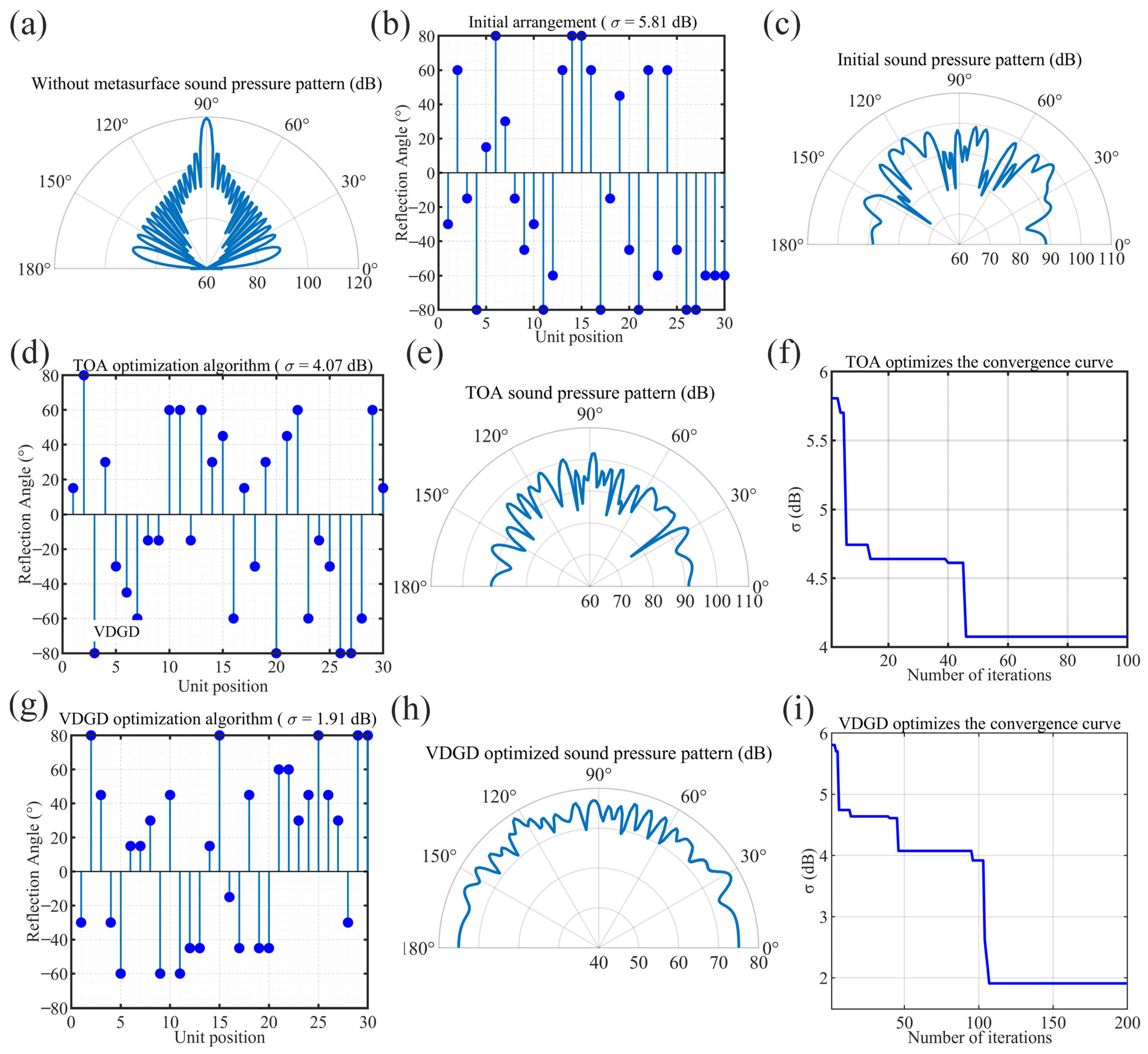
Figure 5a shows the far-field scattered sound pressure pattern at acoustic wave incidence in the absence of metasurface coverage, where it can be seen that the acoustic wave was reflected by the mirror image. The reflection angles of the 30 metasurface cells were first randomly generated using the random initialization method.
Figure 5b shows the initial randomly arranged sequence generated before optimization, with disordered angular distribution and an initial standard deviation of 5.81 dB.
Figure 5c shows the sound pressure scattering diagram corresponding to the initial arrangement, reflecting that the randomly generated initial solution had large fluctuations in the far-field sound pressure distribution and poor scattering uniformity. After the global search, the objective function value showed an obvious decreasing trend during 100 iterations. The experimental data show that the standard deviation
σ decreased from 5.81 dB to 4.64 dB at the early stage of iteration (at about the 14th iteration), but, finally, the optimal solution obtained at the 46th iteration had its
σ value stabilized at about 4.07 dB, which was a reduction of 29.95% (as shown in
Figure 5f). Random perturbations and the Metropolis acceptance criterion were employed in this process, allowing the algorithm to jump out of the local optimum region, thus improving the scattering uniformity of the hypersurface. Comparison of
Figure 5e,f shows that the acoustic wave diffuse reflectance uniformity was significantly improved after the global optimization. The local fine-tuning phase was performed after obtaining a better global solution. In this stage, the reflection angles of each metasurface cell were enumeratively fine tuned in terms of each unit for the arrangement obtained from the global search.
Figure 5i shows that, after no more than 10 local adjustments in the local fine-tuning stage, the final σ value steadily decreased to about 1.91 dB, which was further reduced by 53.07% from the TOA stage. The experimental results show that the randomly initialized design performed poorly in terms of standard deviation, and the scattering distribution was significantly nonuniform. Although the global search could improve the uniformity, the ideal uniformity could not be achieved due to the lack of local fine tuning. In contrast, the combinatorial optimization algorithm fully explored the design space in the global search phase, and it then achieved detailed optimization locally, which ultimately led to it significantly outperforming all other methods in terms of the σ index. In addition, it can be observed that—through the far-field acoustic pressure pattern (
Figure 5h), as well as the convergence curve (
Figure 5i)—the acoustic pressure field of the combined method was smoother and more uniform, and the convergence process of the objective function was stabilized, which proves the effectiveness of the method.
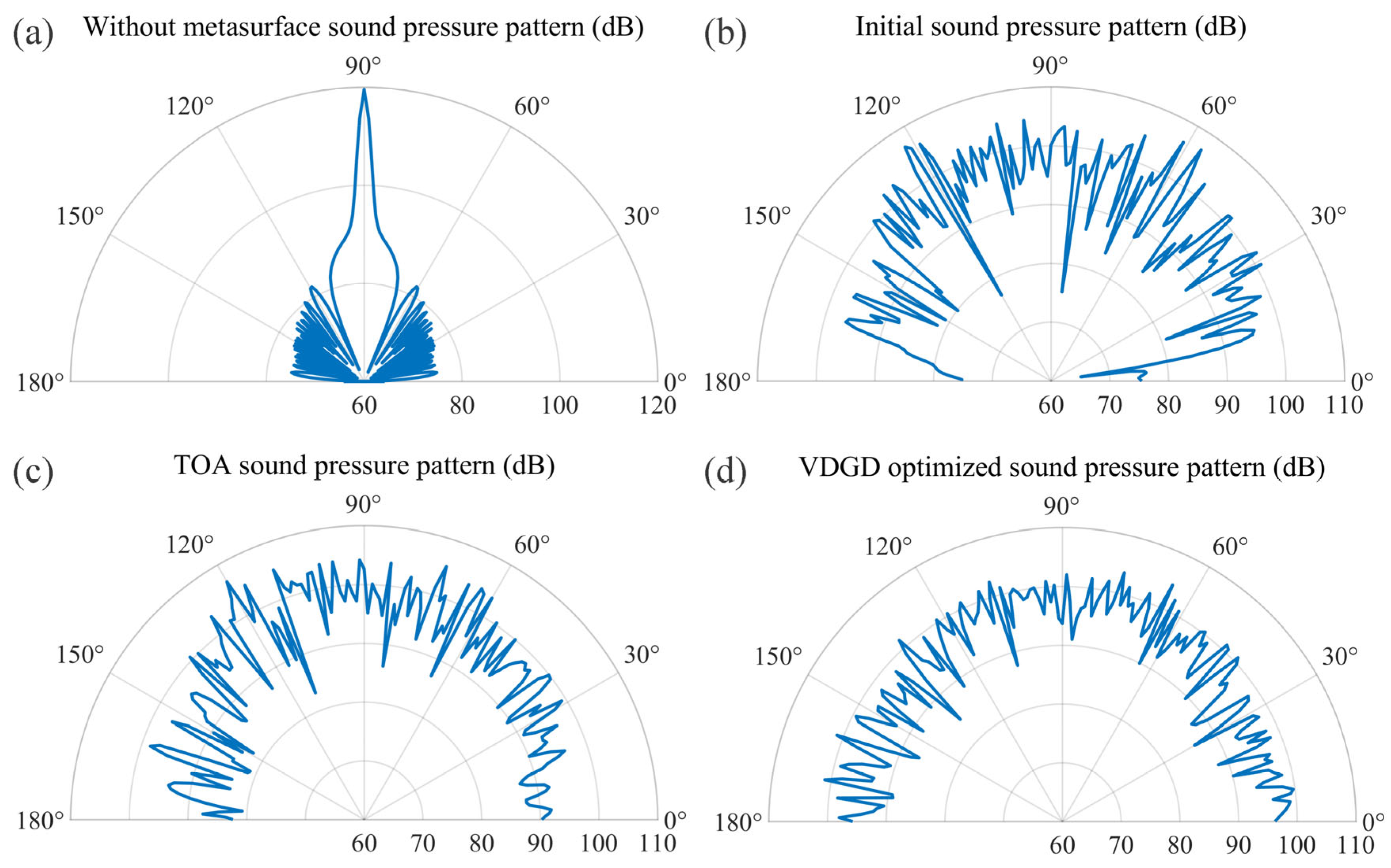
Then, the COMSOL simulation verification was also performed. To further validate the proposed algorithm, the finite-element analysis software COMSOL (Multiphysics 6.1) was used to model and simulate the diffuse scattering metasurface configurations under the four scenarios mentioned above. All scenarios adopted a 30-unit one-dimensional metasurface structure modeled on a 0.03 m thick steel plate, and this was then immersed in a semicircular water domain (with a radius of 5 m, simulating an infinite field). A plane wave radiation boundary condition was applied to the water domain boundary to absorb the outgoing sound waves and eliminate reflection interference. The subwavelength-scale metasurface structure was locally refined, while the water domain was meshed with free tetrahedral elements (maximum size λ/6) to ensure accuracy. A vertically incident plane wave (3000 Hz) was applied and the far-field sound pressure level was sampled at 180 angles (0°–180°, 1° intervals), and this quantified the diffuse reflection uniformity through standard deviation (σ). The simulation results are shown in
Figure 6. Without the metasurface, most of the incident sound wave’s energy was reflected in the direction perpendicular to the plane, manifesting as a main lobe in the diagram, while a small portion radiated laterally, forming side lobes. Following initial arrangement, TOA optimization, and VDGD processing, the acoustic metasurface effectively suppressed specular reflection while redirecting scattered waves significantly away from the incident direction. This transformed the incident sound wave into multiple reflected beams with reduced sound pressure levels compared to conventional plate reflections.
The VDGD-optimized metasurface exhibited a semicircular radiation profile, enabling uniform energy scattering of vertically incident plane acoustic waves. The standard deviation σ was calculated as the uniformity evaluation index by selecting 180 sampling points uniformly in the range of the radiation direction. The metasurface demonstrated progressively decreasing σ values of 8.41 (initial arrangement), 5.86 (TOA), and 3.85 (VDGD), indicating that the scattered sound field obtained after VDGD optimization was close to the ideal diffuse sound field, which validates the superior effectiveness of the VDGD optimization algorithm.
Additionally, to validate that the VDGD optimization model outperforms conventional design methods, it was compared with traditional approaches relying on finite element simulations. Traditional optimization methods rely on full-wave frequency-domain simulations (e.g., using COMSOL Multiphysics 6.1) in each iteration, which takes about 16 min per simulation. This is a significant computational bottleneck that severely limits large-scale iterative searches. In contrast, the proposed VDGD algorithm employs a semi-analytical framework based on far-field sound pressure superposition to quickly calculate diffuse reflection uniformity measures (e.g., standard deviation σ). This approach bypasses repetitive finite element analysis and enables the entire optimization process to be completed in less than 60 s, which is a 93.75% reduction in computational time compared to conventional FEM-driven methods.
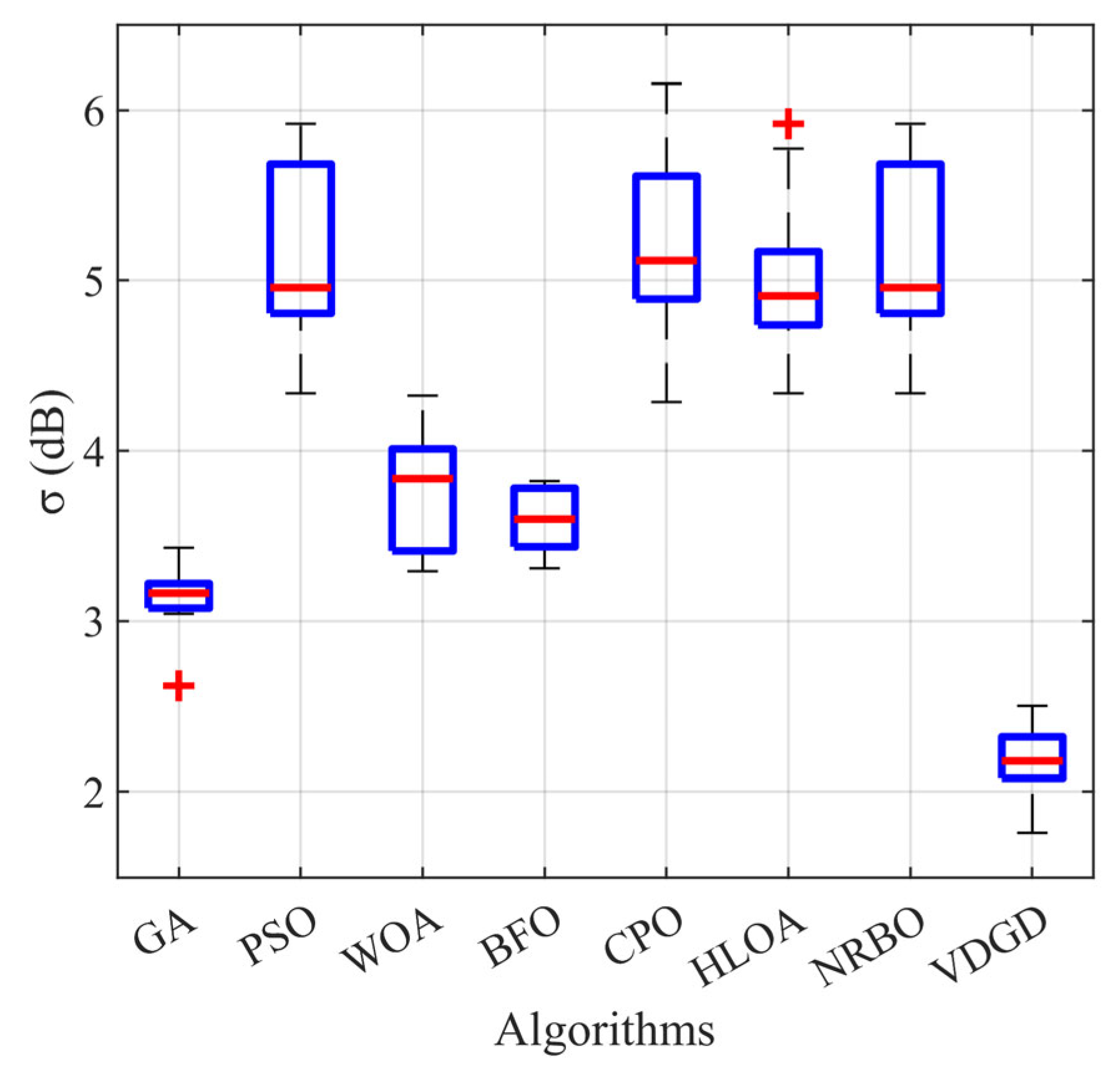
Finally, multi-algorithm performance evaluation was conducted. To quantify the VDGD’s advantages, comparisons were conducted with seven classic algorithms (GA, PSO, Whale Optimization Algorithm (WOA), Bitter Fish Optimization Algorithm (BFO), Crowned Porcupine Optimization Algorithm (CPO), Horned Lizard Optimization Algorithm (HLOA), and the Newton–Raphson Optimization Algorithm (NRBO). All algorithms optimized the same 30-unit metasurface under identical parameters (reflection angle set Φ, f = 3000 Hz, water environment). Each algorithm ran 10 times with randomized initializations (population size 100, maximum iterations 100, etc.), totaling 80 experiments to mitigate initial condition bias. Optimization efficacy was quantified by the σ of the objective function, where lower σ values indicate greater stability and more successful optimization.
The experimental results are summarized in
Table 3 and
Figure 7.
Table 3 reveals that the initial metasurface arrangement exhibited an average σ value of 5.63 dB under randomized initialization, indicating suboptimal energy distribution uniformity in the scattering patterns. Subsequent optimization processes yielded distinct performance across algorithms, with the final mean σ values as follows: GA at 3.14 dB, PSO at 5.11 dB, WOA at 3.77 dB, BFO at 3.59 dB, CPO at 5.23 dB, HLOA at 5.02 dB, and NRBO at 5.11 dB. In contrast, the VDGD-optimized metasurface achieved a significantly reduced mean σ value of 2.16 dB. This systematic comparison demonstrates VDGD’s superior performance in minimizing the objective function (standard deviation), exhibiting 31.21% greater stability than the second-best algorithm (GA) and outperforming conventional methods by up to 57.73% (vs. PSO).
Comprehensive algorithmic benchmarking reveals distinct performance profiles across optimization methods. The GA leverages crossover and mutation mechanisms for global solution space exploration, achieving a mean σ value of 3.14 dB, but it tends to fall into local optima under some initial conditions. PSO performed poorly after discretization with an average σ of 5.11 dB. While the WOA exhibited inherent advantages in continuous problem domains, its discretized implementation achieved marginally superior performance compared to PSO with a mean σ value of 3.78 dB, but there were obvious fluctuations in the solution space. The emerging BFO demonstrates notable stability (3.59 dB, 95% CI: 3.52–3.66 dB) with <5% performance variation across initial conditions. The CPO (5.23 dB) and HLOA (5.02 dB) algorithms showed high environmental sensitivity (relative standard deviation >10%), and NRBO handled the nonlinear optimization with some advantage, yet its σ rose to 5.11 dB due to the gradient collapse phenomenon that was caused by discretization. In contrast, VDGD effectively synthesized the advantages of global search and local fine tuning through the strategy of global phase exploration coupled with local phase enumeration, resulting in a reduction of σ to 2.16 dB.
Further statistical analysis using box plots on ten experimental trials visually demonstrated the performance distribution across algorithms under varying initial conditions. The VDGD algorithm exhibited superior stability metrics: its boxplot shows the lowest median value (2.18 dB) with a compact interquartile range (IQR = 0.35 dB) and an absence of outliers, indicating consistent high-quality solutions. In contrast, conventional algorithms like PSO, CPO, and NRBO displayed wider data spreads (PSO: IQR = 0.94 dB, CPO: IQR = 2.05 dB), while GA and HLOA demonstrated outlier clusters (10% and 4.7% outlier rates, respectively), signifying susceptibility to local optima entrapment and solution space oscillation. This systematic comparison reveals VDGD’s enhanced robustness and reduced dependence on initial metasurface configurations.
In conclusion, systematic benchmarking of eight optimization algorithms demonstrates that the VDGD achieves breakthrough performance in metasurface reflection angle optimization. This dual-strategy framework reduces the objective function’s standard deviation (σ) to 2.16 dB, representing a 31.21–87.77% relative reduction compared to conventional methods. The minimal differences between different initializations and the absence of outlier results for 10 trials demonstrate the excellent robustness and stability of the method, highlighting its advantages in exploring the optimization design of complex diffuse reflection acoustic metasurfaces.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}