
Cyclic Thermomechanical Elasto-Viscoplasticity Implementation Using User Material Interface




Abstract

1. Introduction
2. Theoretical Fundamentals
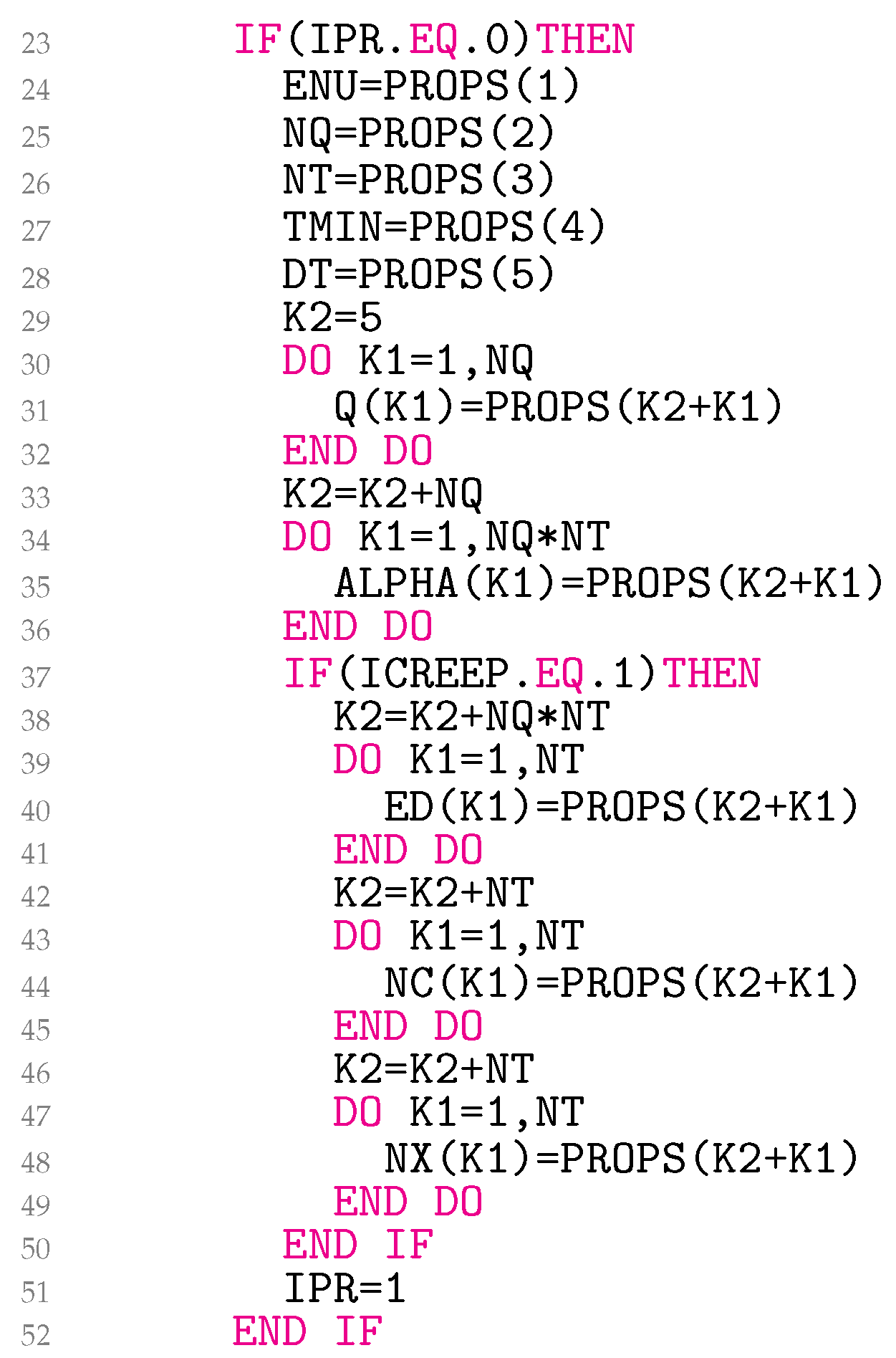
2.1. Initialisation
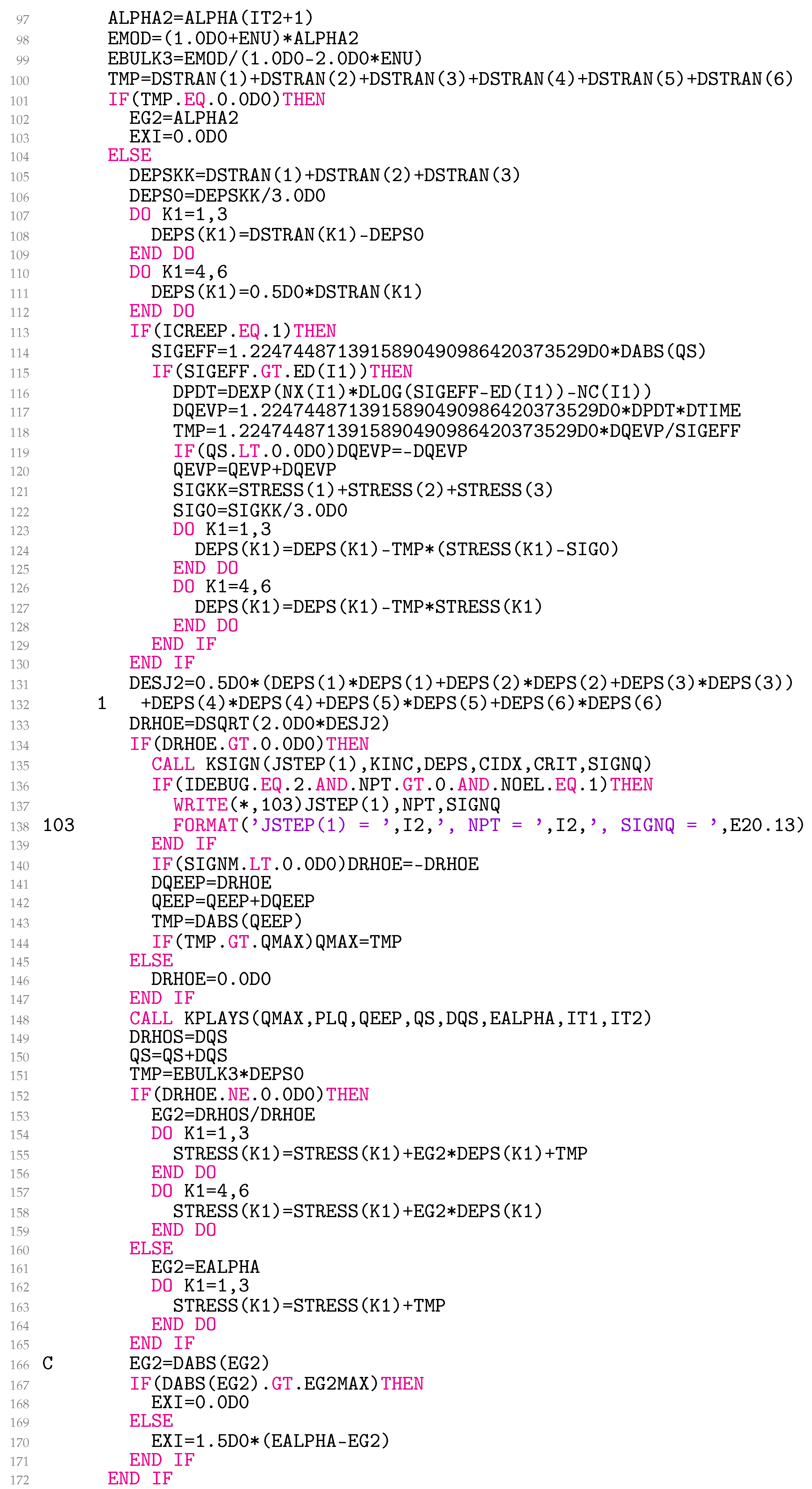
2.2. Viscoplasticity Assessment
2.3. Elastoplasticity Assessment
2.4. Stress Tensor Assessment
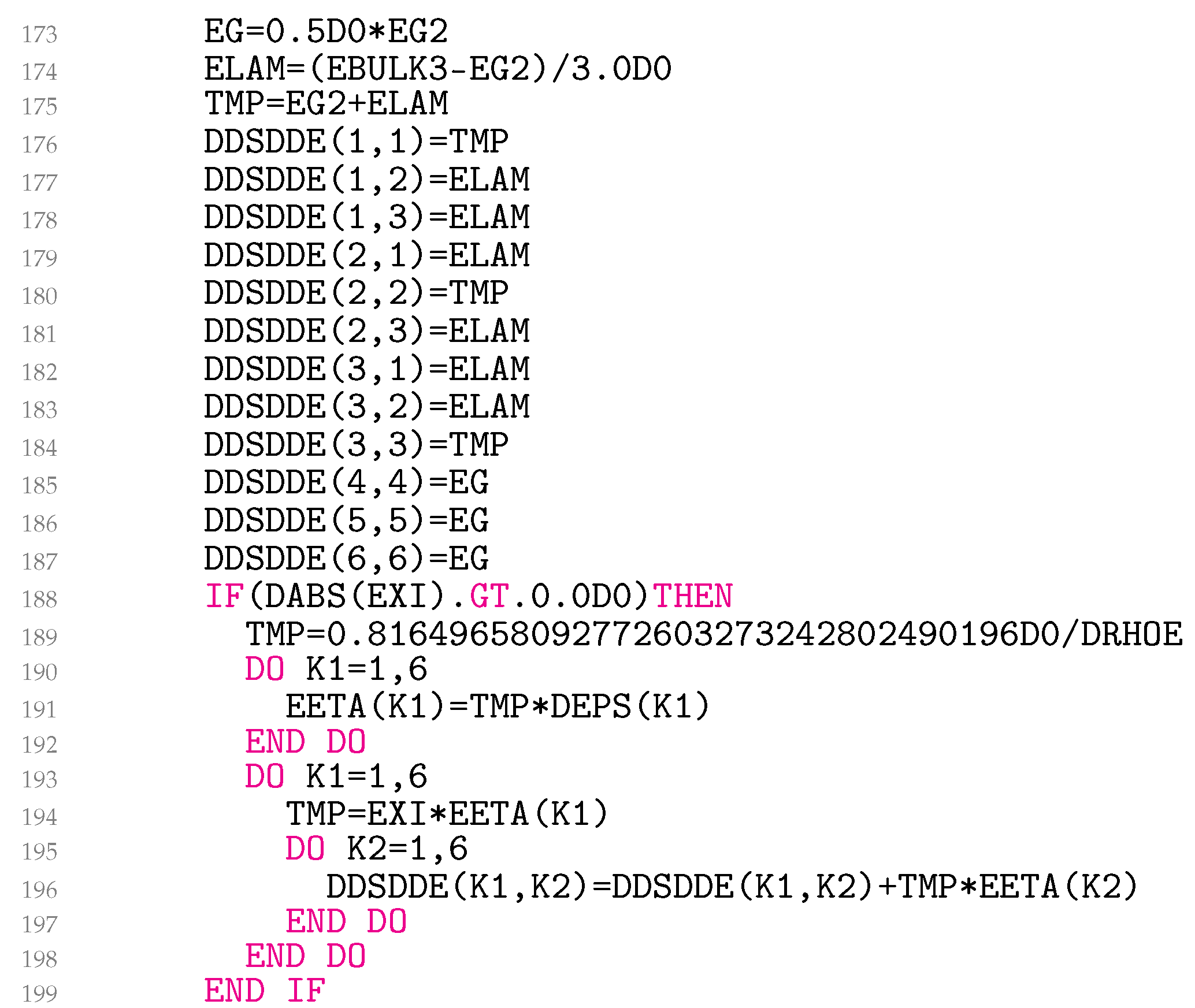
2.5. Consistent Material Jacobian
3. Implementation
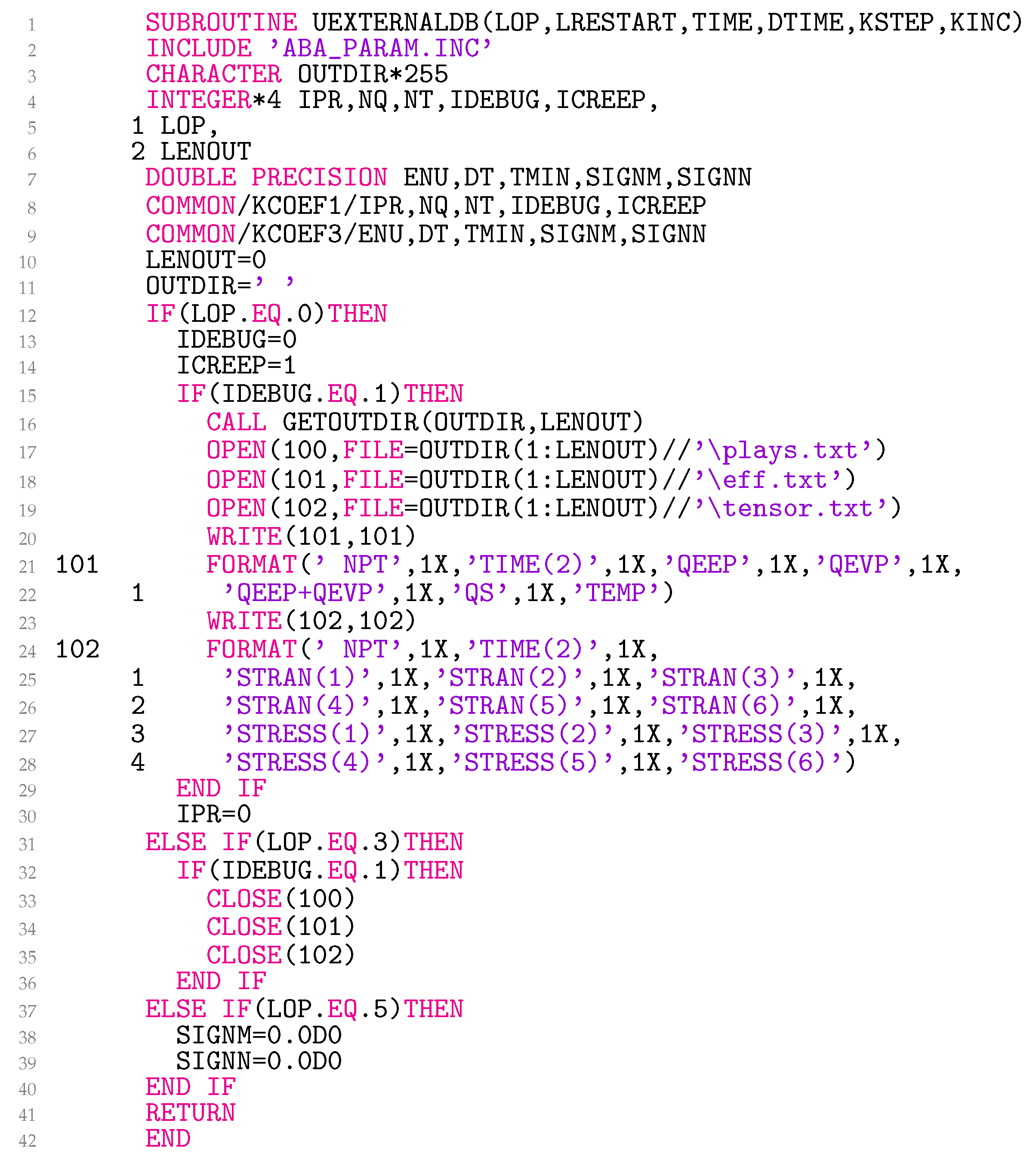
3.1. Subroutine UEXTERNALDB
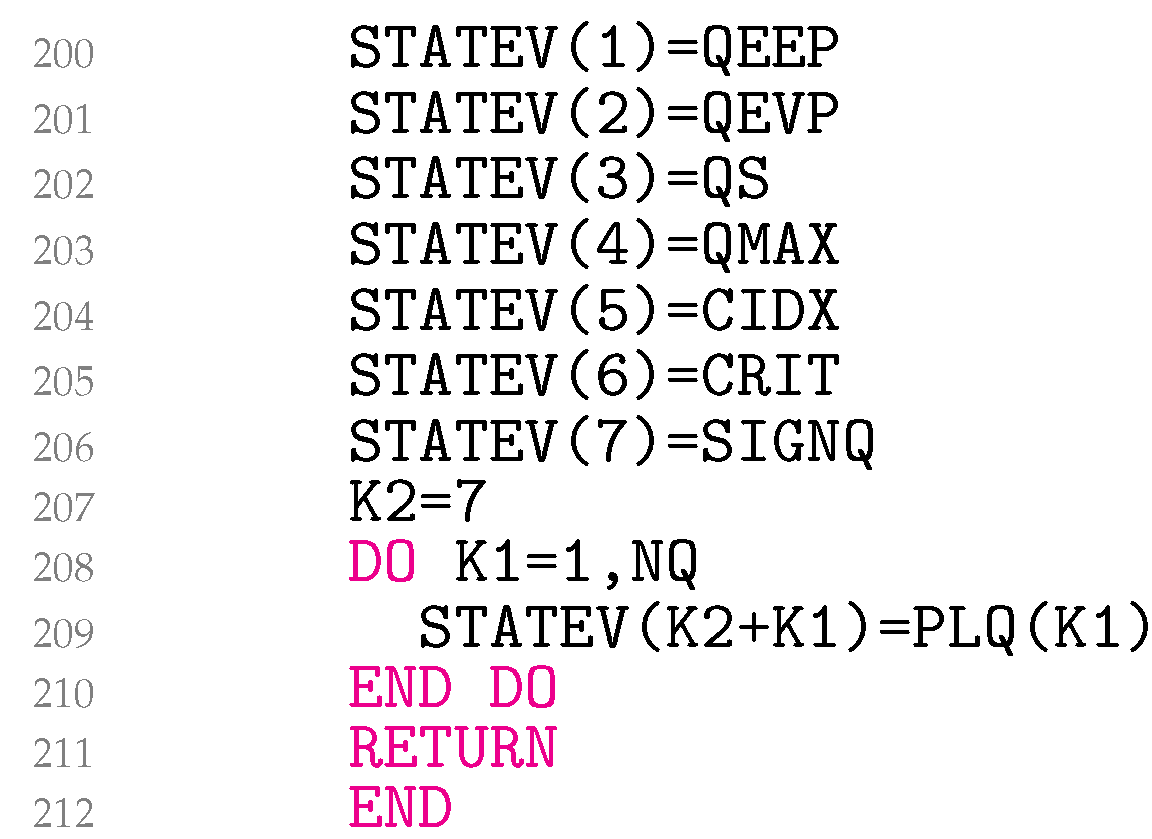
3.2. Subroutine SDVINI
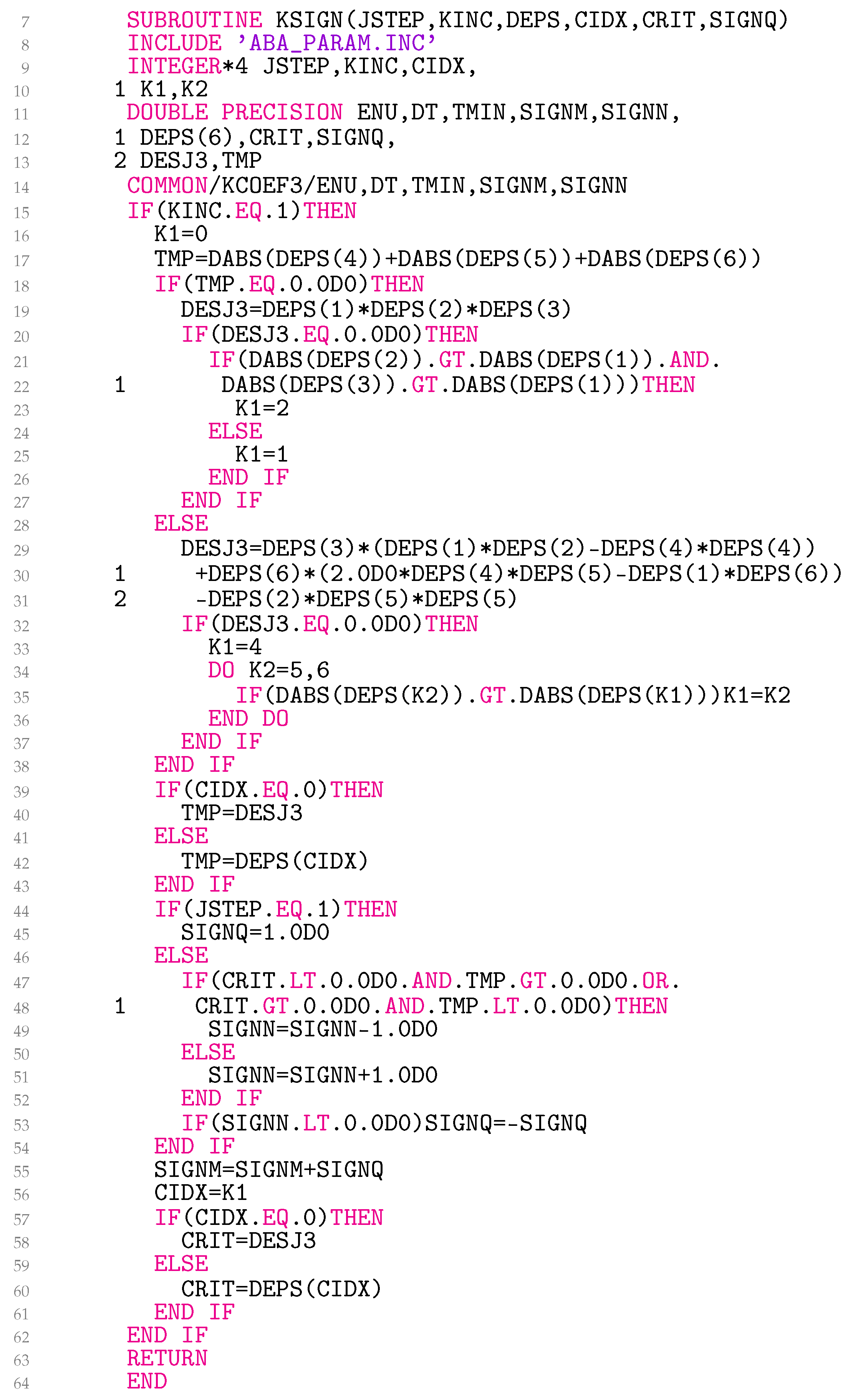
3.3. Subroutine KSIGN
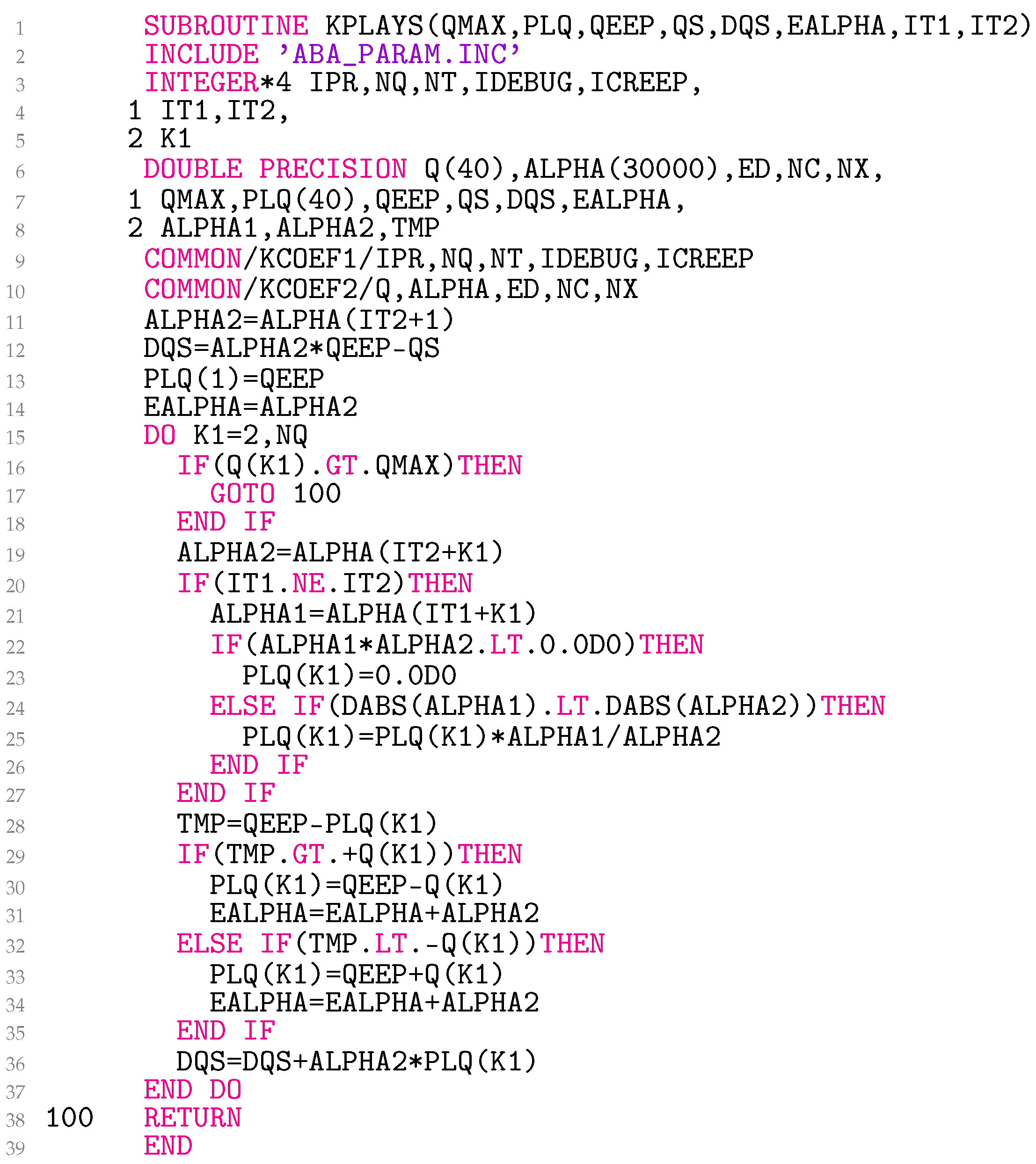
3.4. Subroutine KPLAYS
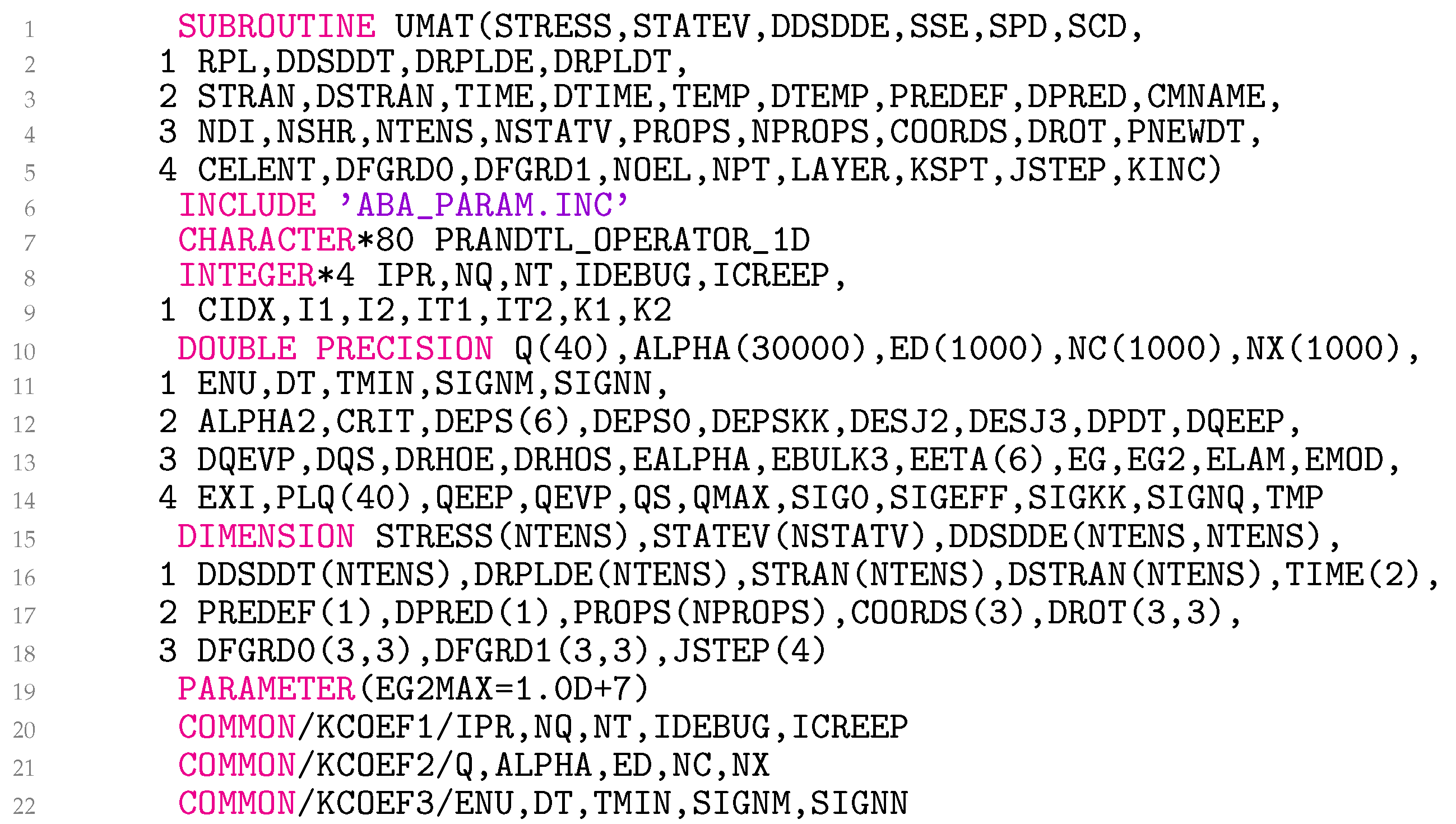
3.5. Subroutine UMAT
3.6. Advantages and Limitations of the Current Implementation
4. Examples
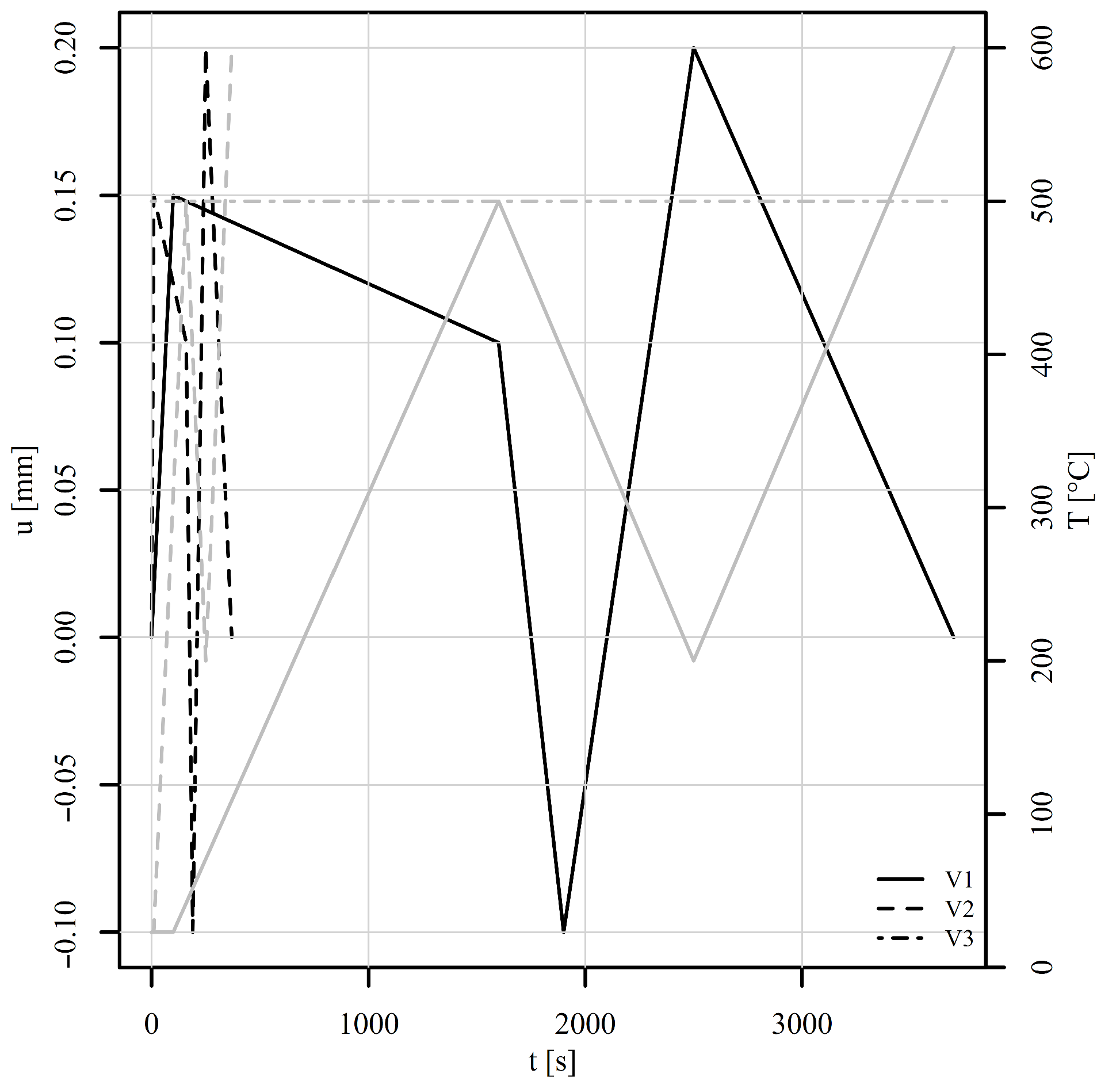
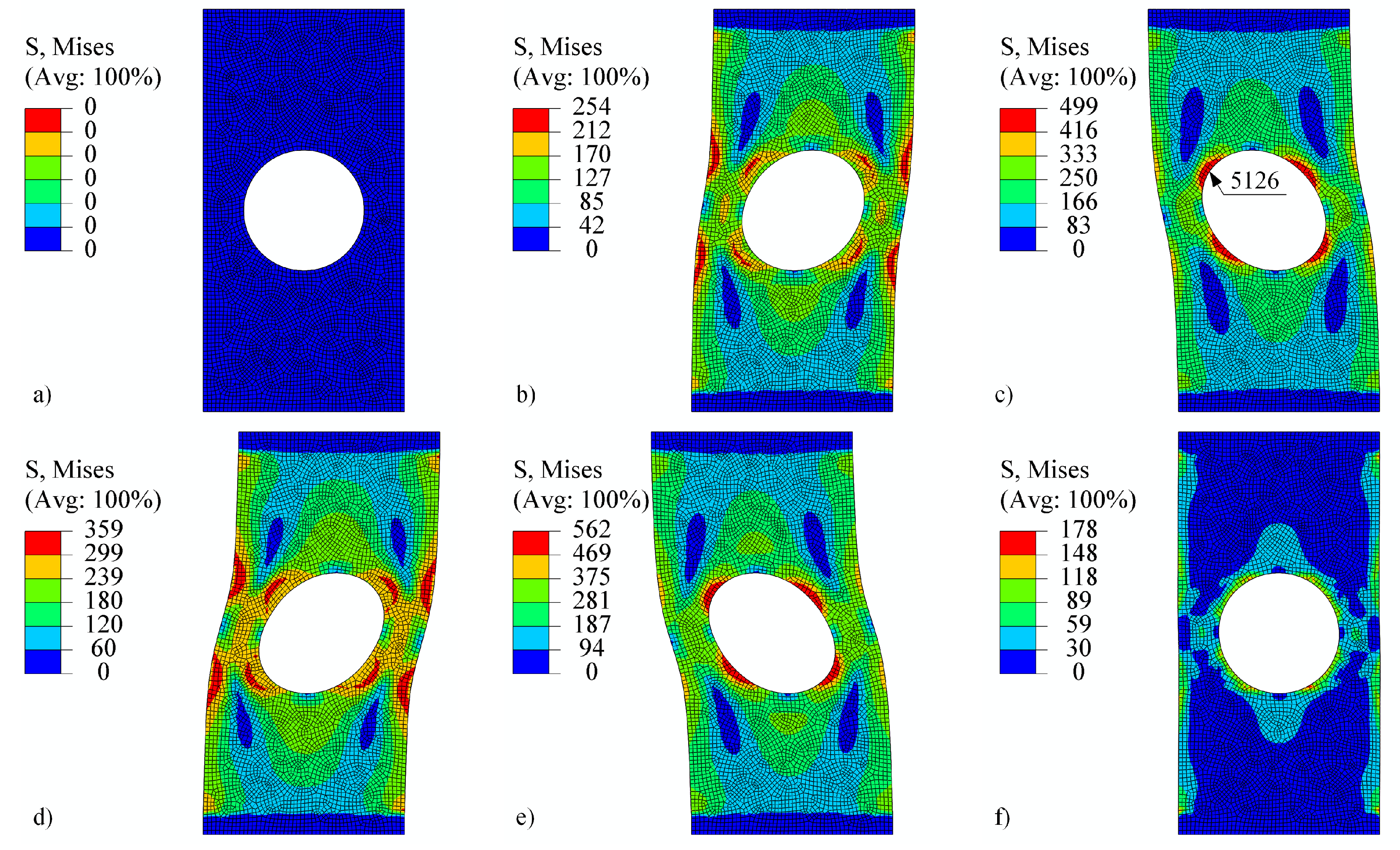
4.1. Perforated Plate Under Tension–Compression Loading
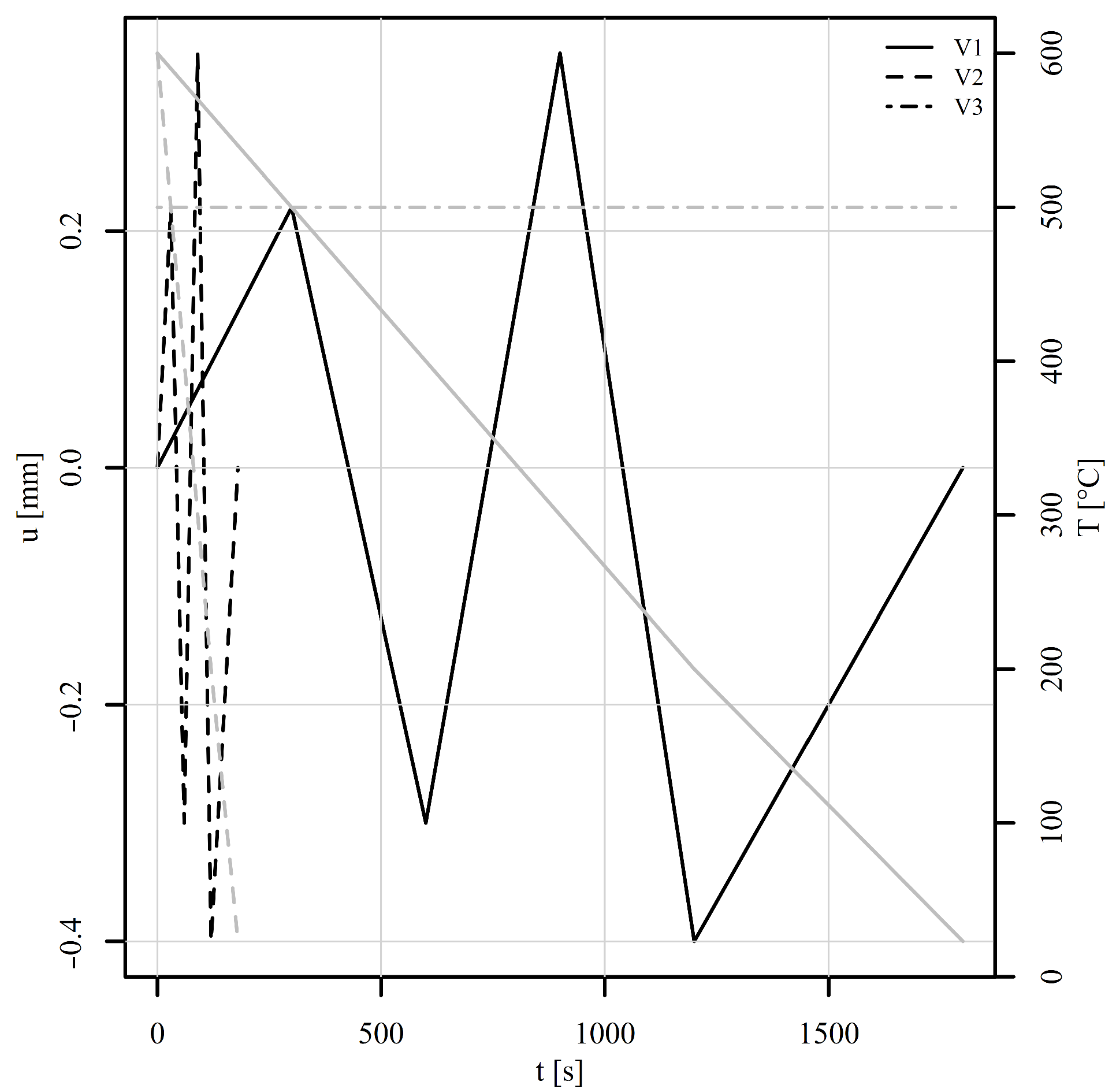
4.2. Perforated Plate Under Shear Loading
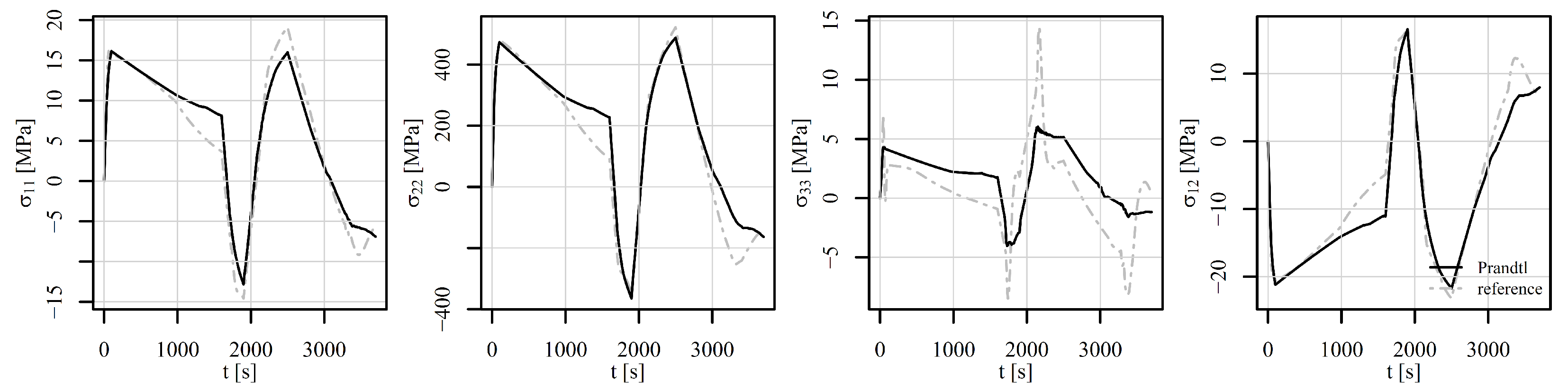
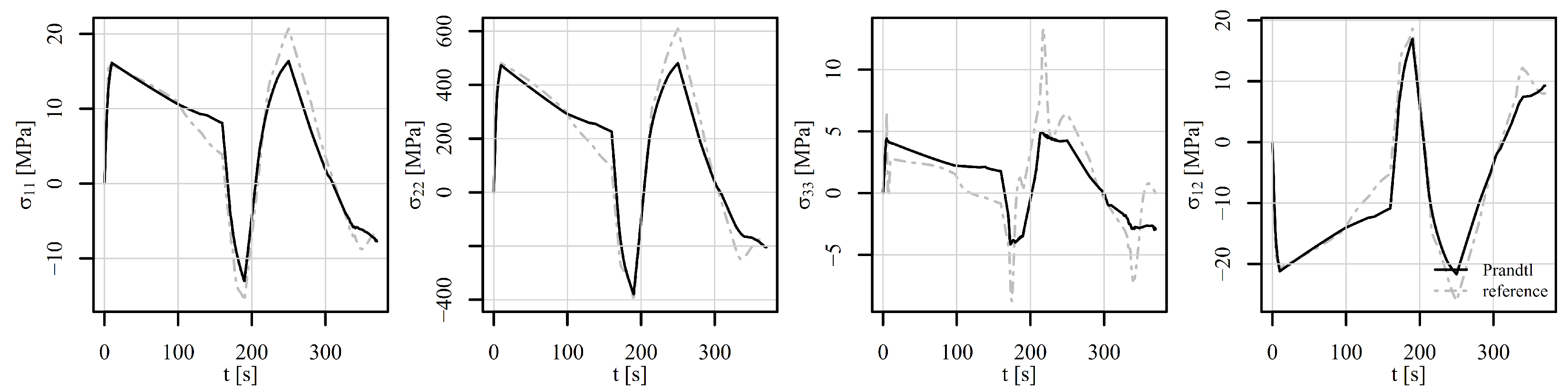
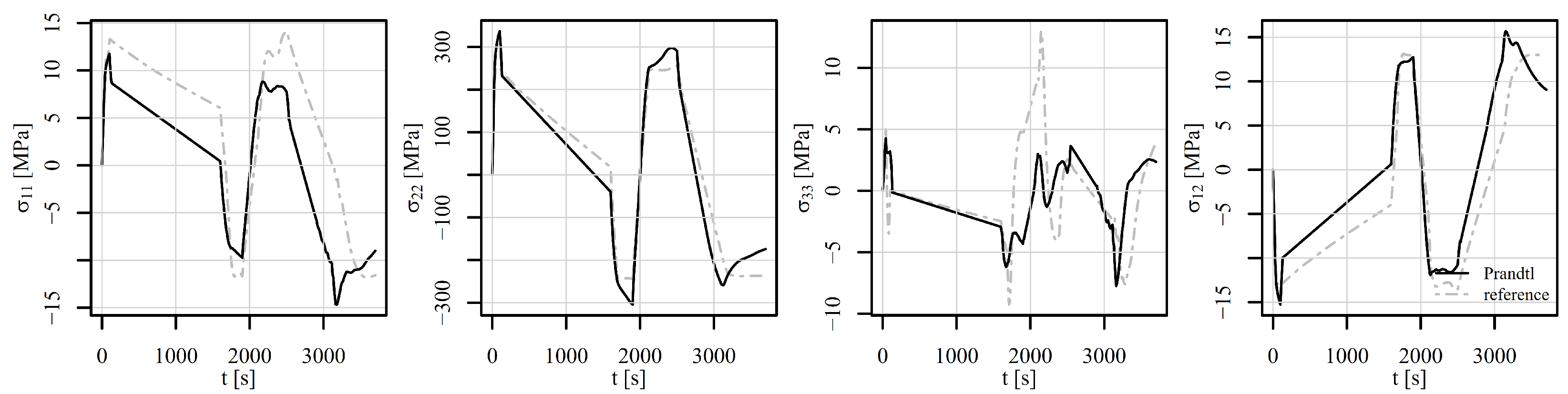
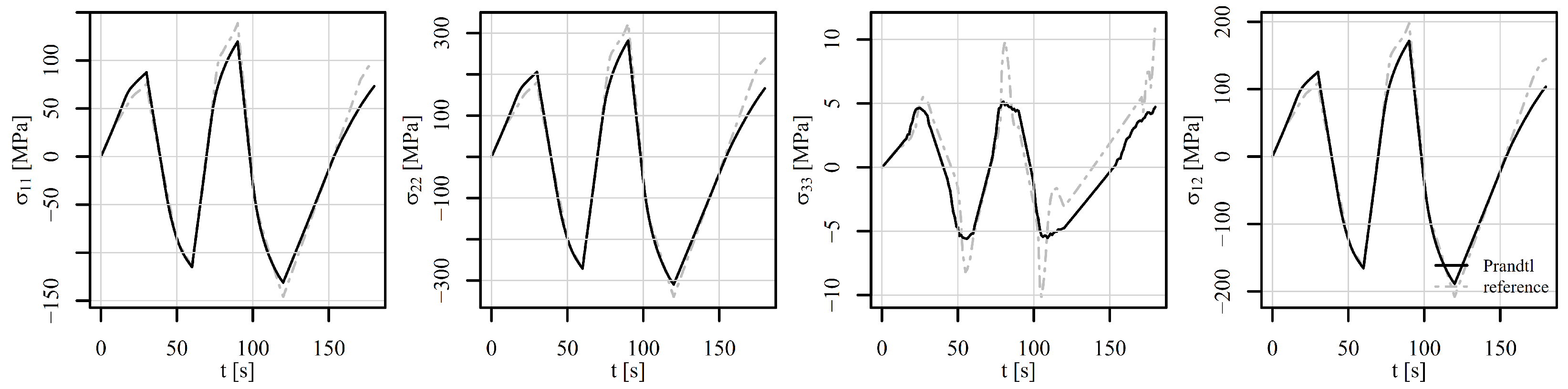
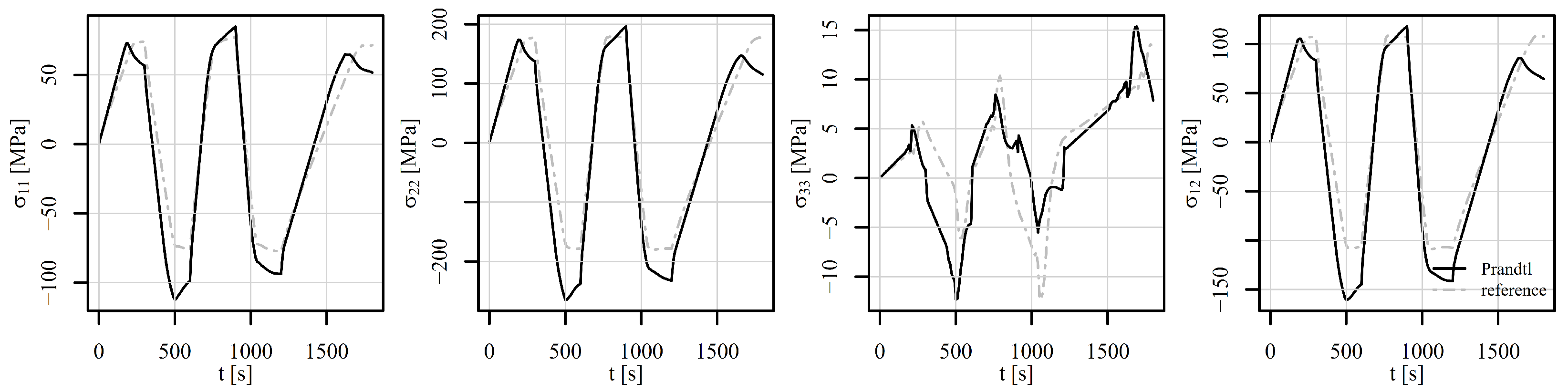
4.3. Model Validation
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Shishvan, S.S.; Rahgouy, A.; Liu, B. RVE-based virtual testing for investigation of the shear behaviour of cross-ply composites. Eng. Comput. 2024, 40, 381–397. [Google Scholar] [CrossRef]
- Das, D.; Kumar, B. Molecular dynamics simulation study to evaluate mechanical properties of plumbene using bending, oscillation and equilibrium MD approaches. Comput. Mater. Sci. 2024, 233, 112678. [Google Scholar] [CrossRef]
- Gahlen, P.; Stommel, M. Multiscale approach to determine the anisotropic mechanical properties of polyisocyanurate metal panels using FEM simulations. Mech. Mater. 2022, 174, 104475. [Google Scholar] [CrossRef]
- Jiang, M.; Shu, Q.; Liu, P.; Wang, F.; Zhu, M.; Wang, W. Testing and numerical simulation of concrete-filled 6061-T6 aluminum tubular stub columns. Structures 2024, 60, 105855. [Google Scholar] [CrossRef]
- Yan, Y.F.; Kou, S.Q.; Yang, H.Y.; Shu, S.L.; Shi, F.J.; Qiu, F.; Jiang, Q.C. Microstructure-based simulation on the mechanical behavior of particle reinforced metal matrix composites with varying particle characteristics. J. Mater. Res. Technol. 2023, 26, 3629–3645. [Google Scholar] [CrossRef]
- Meoni, A.; D’Alessandro, A.; Mattiacci, M.; Garcřa-Macřas, E.; Saviano, F.; Parisi, F.; Lignola, G.P.; Ubertini, F. Structural performance assessment of full-scale masonry wall systems using operational modal analysis: Laboratory testing and numerical simulations. Eng. Struct. 2024, 304, 117663. [Google Scholar] [CrossRef]
- Ji, S.; Karlovšek, J. Optimized differential evolution algorithm for solving DEM material calibration problem. Eng. Comput. 2023, 39, 2001–2016. [Google Scholar] [CrossRef]
- Vila-Cha, J.L.; Couto Carneiro, A.M.; Ferreira, B.P.; Andrade Pires, F. A numerical assessment of partitioned implicit methods for thermomechanical problems. Comput. Struct. 2023, 277–278, 106969. [Google Scholar] [CrossRef]
- Campagnolo, A.; Roveda, I.; Meneghetti, G. The Peak Stress Method combined with 3D finite element models to assess the fatigue strength of complex welded structures. Procedia Struct. Integr. 2019, 19, 617–626, Fatigue Design 2019, International Conference on Fatigue Design, 8th Edition. [Google Scholar] [CrossRef]
- Jivkov, A.P.; Berbatov, K.; Boom, P.D.; Hazel, A.L. Microstructures, physical processes, and discrete differential forms. Procedia Struct. Integr. 2023, 43, 15–22, Materials Structure & Micromechanics of Fracture. [Google Scholar] [CrossRef]
- Moreira, J.; Moleiro, F.; Araujo, A.; Pagani, A. Assessment of layerwise user-elements in Abaqus for static and free vibration analysis of variable stiffness composite laminates. Compos. Struct. 2023, 303, 116291. [Google Scholar] [CrossRef]
- De Bellis, M.; Wriggers, P.; Hudobivnik, B. Serendipity virtual element formulation for nonlinear elasticity. Comput. Struct. 2019, 223, 106094. [Google Scholar] [CrossRef]
- Lyu, W.; Xia, M.; Luo, Z.; Liu, M.; Song, D. Analytical solutions for thermal-mechanical coupling of energy piles in double-layer soil. Comput. Geotech. 2024, 168, 106153. [Google Scholar] [CrossRef]
- Šeruga, D.; Kosmas, O.; Jivkov, A.P. Geometric modelling of elastic and elastic-plastic solids by separation of deformation energy and Prandtl operators. Int. J. Solids Struct. 2020, 198, 136–148. [Google Scholar] [CrossRef]
- Peng, Q.; Chen, J.; Ni, K.; Liu, Z.; Chen, L.Q.; Wang, Z. Analytical 3D model for coupled magneto-mechanical behaviors of ferromagnetic shape memory alloy. Int. J. Solids Struct. 2024, 289, 112619. [Google Scholar] [CrossRef]
- Chen, T.; Cheng, Y.; Wu, H. A simplified simulation strategy for barge-bridge collision learned from collapse of Taiyangbu Bridge. Eng. Struct. 2024, 303, 117592. [Google Scholar] [CrossRef]
- Previati, A.; De Caro, M.; Crosta, G.B. Hydro-stratigraphic datasets for the reconstruction of a large scale 3D FEM numerical model in the Milan metropolitan area (northern Italy). Data Brief 2020, 33, 106541. [Google Scholar] [CrossRef]
- Santos, K.; Silva, N.M.; Dias, J.P.; Amado, C. A methodology for crash investigation of motorcycle-cars collisions combining accident reconstruction, finite elements, and experimental tests. Eng. Fail. Anal. 2023, 152, 107505. [Google Scholar] [CrossRef]
- Guo, L.X.; Zhang, C. Development and Validation of a Whole Human Body Finite Element Model with Detailed Lumbar Spine. World Neurosurg. 2022, 163, e579–e592. [Google Scholar] [CrossRef]
- Milewski, S.; Putanowicz, R. Higher order meshless schemes applied to the finite element method in elliptic problems. Comput. Math. Appl. 2019, 77, 779–802. [Google Scholar] [CrossRef]
- Mizushima, Y.; Kinoshita, T. Blind analysis on the shaking table test of a 7-story reinforced concrete building using a detailed finite element model. J. Build. Eng. 2022, 52, 104368. [Google Scholar] [CrossRef]
- Guo, C.; Xiao, X.; Song, L.; Tan, Z.; Feng, X. A generalized finite difference method for solving elliptic interface problems with non-homogeneous jump conditions on surfaces. Eng. Anal. Bound. Elem. 2023, 157, 259–271. [Google Scholar] [CrossRef]
- Wen, J.; Zhou, Y.; Zhang, C.; Wen, P. Meshless variational method applied to fracture mechanics with functionally graded materials. Eng. Anal. Bound. Elem. 2023, 157, 44–58. [Google Scholar] [CrossRef]
- Cao, P.; Chen, J.; Wang, F. An extended mixed finite element method for elliptic interface problems. Comput. Math. Appl. 2022, 113, 148–159. [Google Scholar] [CrossRef]
- Cai, Y.; Chen, J.; Wang, N. A Nitsche extended finite element method for the biharmonic interface problem. Comput. Methods Appl. Mech. Eng. 2021, 382, 113880. [Google Scholar] [CrossRef]
- Araya, R.; Chouly, F. Residual a Posteriori Error Estimation for Frictional Contact with Nitsche Method. J. Sci. Comput. 2023, 96, 87. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, J. Simplified weak Galerkin and new finite difference schemes for the Stokes equation. J. Comput. Appl. Math. 2019, 361, 176–206. [Google Scholar] [CrossRef]
- Gao, F.; Zhang, S.; Zhu, P. Modified weak Galerkin method with weakly imposed boundary condition for convection-dominated diffusion equations. Appl. Numer. Math. 2020, 157, 490–504. [Google Scholar] [CrossRef]
- Burman, E.; Hansbo, P.; Larson, M.G. CutFEM based on extended finite element spaces. Numer. Math. 2022, 152, 331–369. [Google Scholar] [CrossRef]
- Šeruga, D.; Hansenne, E.; Haesen, V.; Nagode, M. Durability prediction of EN 1.4512 exhaust mufflers under thermomechanical loading. Int. J. Mech. Sci. 2014, 84, 199–207. [Google Scholar] [CrossRef]
- Chen, Y.; Izzuddin, B.A. A simplified finite strain plasticity model for metallic applications. Eng. Comput. 2023, 39, 3955–3972. [Google Scholar] [CrossRef]
- Oliveira, D.B.; Penna, S.S. A General framework for finite strain elastoplastic models: A theoretical approach. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 412. [Google Scholar] [CrossRef]
- Pirzadeh, A.; Dalla Barba, F.; Bobaru, F.; Sanavia, L.; Zaccariotto, M.; Galvanetto, U. Elastoplastic peridynamic formulation for materials with isotropic and kinematic hardening. Eng. Comput. 2024, 40, 2063–2082. [Google Scholar] [CrossRef]
- Liu, L.W.; Ciou, Z.C.; Chen, P.H. A return-free integration for anisotropic-hardening elastoplastic models. Comput. Struct. 2024, 301, 107423. [Google Scholar] [CrossRef]
- Jrad, H.; Mars, J.; Wali, M.; Dammak, F. Geometrically nonlinear analysis of elastoplastic behavior of functionally graded shells. Eng. Comput. 2019, 35, 833–847. [Google Scholar] [CrossRef]
- Ahn, J.G.; Lee, J.C.; Kim, J.G.; Yang, H.I. Multiphysics model reduction of thermomechanical vibration in a state-space formulation. Eng. Comput. 2023, 39, 3371–3399. [Google Scholar] [CrossRef]
- Dörr, D.; Joppich, T.; Kugele, D.; Henning, F.; Kärger, L. A coupled thermomechanical approach for finite element forming simulation of continuously fiber-reinforced semi-crystalline thermoplastics. Compos. Part A Appl. Sci. Manuf. 2019, 125, 105508. [Google Scholar] [CrossRef]
- Moradi, A.; Ansari, R.; Hassanzadeh-Aghdam, M.K.; Jang, S.H. Thermomechanical behavior of carbon nanotube/graphene nanoplatelet-reinforced shape memory polymer nanocomposites: A micromechanics-based finite element approach. Eur. J. Mech.-A/Solids 2024, 107, 105360. [Google Scholar] [CrossRef]
- Chen, X.; Yue, J.; Wu, X.; Lei, J.; Fang, X. A damage coupled elasto-plastic constitutive model of marine high-strength steels under low cycle fatigue loadings. Int. J. Press. Vessel. Pip. 2023, 205, 104982. [Google Scholar] [CrossRef]
- Eghtesad, A.; Germaschewski, K.; Knezevic, M. Coupling of a multi-GPU accelerated elasto-visco-plastic fast Fourier transform constitutive model with the implicit finite element method. Comput. Mater. Sci. 2022, 208, 111348. [Google Scholar] [CrossRef]
- Park, J.; Rout, M.; Min, K.M.; Chen, S.F.; Lee, M.G. A fully coupled crystal plasticity-cellular automata model for predicting thermomechanical response with dynamic recrystallization in AISI 304LN stainless steel. Mech. Mater. 2022, 167, 104248. [Google Scholar] [CrossRef]
- Zhang, T.; Zhou, X.P.; Qian, Q.H. Drucker-Prager plasticity model in the framework of OSB-PD theory with shear deformation. Eng. Comput. 2023, 39, 1395–1414. [Google Scholar] [CrossRef]
- Asgari, M.; Kouchakzadeh, M.A. An improved plane strain/plane stress peridynamic formulation of the elastic–plastic constitutive law for von Mises materials. Eng. Comput. 2023, 40, 2127–2142. [Google Scholar] [CrossRef]
- Rodriguez, S.; Pasquale, A.; Nguyen, K.; Ammar, A.; Chinesta, F. A time multiscale based data-driven approach in cyclic elasto-plasticity. Comput. Struct. 2024, 295, 107277. [Google Scholar] [CrossRef]
- Chaboche, J. Constitutive equations for cyclic plasticity and cyclic viscoplasticity. Int. J. Plast. 1989, 5, 247–302. [Google Scholar] [CrossRef]
- Armstrong, P.J.; Frederick, C.O. A Mathematical Representation of the Multiaxial Bauschinger Effect; Technical Report, Report RD/B/N731; CEGB, Central Electricity Generating Board: Berkley, UK, 1966. [Google Scholar]
- Chaboche, J. A review of some plasticity and viscoplasticity constitutive theories. Int. J. Plast. 2008, 24, 1642–1693. [Google Scholar] [CrossRef]
- Besseling, J. A theory of elastic, plastic and creep deformations of an initially isotropic material. J. Appl. Mech. 1958, 25, 529–536. [Google Scholar] [CrossRef]
- Nagode, M.; Klemenc, J.; Oman, S.; Šeruga, D. A closed-form solution for temperature-dependent elastoplastic problems using the Prandtl operator approach. Commun. Nonlinear Sci. Numer. Simul. 2021, 99, 105839. [Google Scholar] [CrossRef]
- Nagode, M.; Klemenc, J.; Oman, S.; Šeruga, D. Elasto-viscoplastic material modelling using the multiaxial Prandtl operator approach. Int. J. Mech. Sci. 2024, 267, 108953. [Google Scholar] [CrossRef]
- Šeruga, D.; Nagode, M. Comparative analysis of optimisation methods for linking material parameters of exponential and power models: An application to cyclic stress-strain curves of ferritic stainless steel. Proc. Inst. Mech. Eng. Part L J. Mater. Des. Appl. 2019, 233, 1802–1813. [Google Scholar] [CrossRef]
- Nagode, M.; Fajdiga, M. Coupled elastoplasticity and viscoplasticity under thermomechanical loading. Fatigue Fract. Eng. Mater. Struct. 2007, 30, 510–519. [Google Scholar] [CrossRef]
- Nagode, M.; Zingsheim, F. An online algorithm for temperature influenced fatigue life estimation: Strain-life approach. Int. J. Fatigue 2004, 26, 155–161. [Google Scholar] [CrossRef]
- Nagode, M.; Šeruga, D.; Hack, M.; Hansenne, E. Damage Operator-Based Lifetime Calculation Under Thermomechanical Fatigue and Creep for Application on Uginox F12T EN 1.4512 Exhaust Downpipes. Strain 2012, 48, 198–207. [Google Scholar] [CrossRef]
- Lemaitre, J.; Chaboche, J.L. Mechanics of Solid Materials; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Dunne, F.; Petrinic, N. Introduction to Computational Plasticity; Oxford University Press: Oxford, UK, 2006. [Google Scholar]
- Sellars, C.; McTegart, W. On the mechanism of hot deformation. Acta Metall. 1966, 14, 1136–1138. [Google Scholar] [CrossRef]
- Peapell, P.; Belk, J. Chapter 3—Thermodynamics and kinetics of solids. In Basic Materials Studies; Peapell, P., Belk, J., Eds.; Butterworth-Heinemann: Oxford, UK, 1985; pp. 49–76. [Google Scholar] [CrossRef]
- Ottosen, N.; Ristinmaa, M. The Mechanics of Constitutive Modeling; Elsevier Science: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Visintin, A. Rheological models and hysteresis effects. Rend. Del Semin. Mat. Della Univ. Padova 1987, 77, 213–241. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2023. [Google Scholar]
- Ramberg, W.; Osgood, W.R. Description of Stress-Strain Curves by Three Parameters. Technical Report, NACA-TN-902; NTRS: Chicago, IL, USA, 1943. [Google Scholar]
- Bartošák, M.; Nagode, M.; Klemenc, J.; Doubrava, K.; Šeruga, D. Use of Prandtl operators in simulating the cyclic softening of Inconel 718 under isothermal low-cycle fatigue loading. Int. J. Mech. Sci. 2022, 222, 107182. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| T [°C] | [MPa] | E [MPa] | [MPa] | [-] | k [MPa] | [MPa] | N [-] |
|---|---|---|---|---|---|---|---|
| 23 | 627 | 210,000 | 842.0 | 0.1180 | 862.8 | 40.08 | 4.8380 |
| 300 | 553 | 204,100 | 773.0 | 0.1190 | 374.2 | 17.56 | 1.3324 |
| 400 | 530 | 187,800 | 688.0 | 0.1029 | 296.6 | 14.13 | 0.8018 |
| 500 | 466 | 184,800 | 500.3 | 0.0773 | 238.9 | 11.03 | 0.3034 |
| 600 | 344 | 162,000 | 331.9 | 0.0583 | 194.8 | 9.47 | 0.0788 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nagode, M.; Oman, S.; Klemenc, J.; Šeruga, D. Cyclic Thermomechanical Elasto-Viscoplasticity Implementation Using User Material Interface. Materials 2025, 18, 2512. https://doi.org/10.3390/ma18112512
Nagode M, Oman S, Klemenc J, Šeruga D. Cyclic Thermomechanical Elasto-Viscoplasticity Implementation Using User Material Interface. Materials. 2025; 18(11):2512. https://doi.org/10.3390/ma18112512
Chicago/Turabian StyleNagode, Marko, Simon Oman, Jernej Klemenc, and Domen Šeruga. 2025. "Cyclic Thermomechanical Elasto-Viscoplasticity Implementation Using User Material Interface" Materials 18, no. 11: 2512. https://doi.org/10.3390/ma18112512
APA StyleNagode, M., Oman, S., Klemenc, J., & Šeruga, D. (2025). Cyclic Thermomechanical Elasto-Viscoplasticity Implementation Using User Material Interface. Materials, 18(11), 2512. https://doi.org/10.3390/ma18112512