
Fatigue Life Prediction of 2024-T3 Al Alloy by Integrating Particle Swarm Optimization—Extreme Gradient Boosting and Physical Model



Abstract
1. Introduction
2. Theoretical Framework and Materials
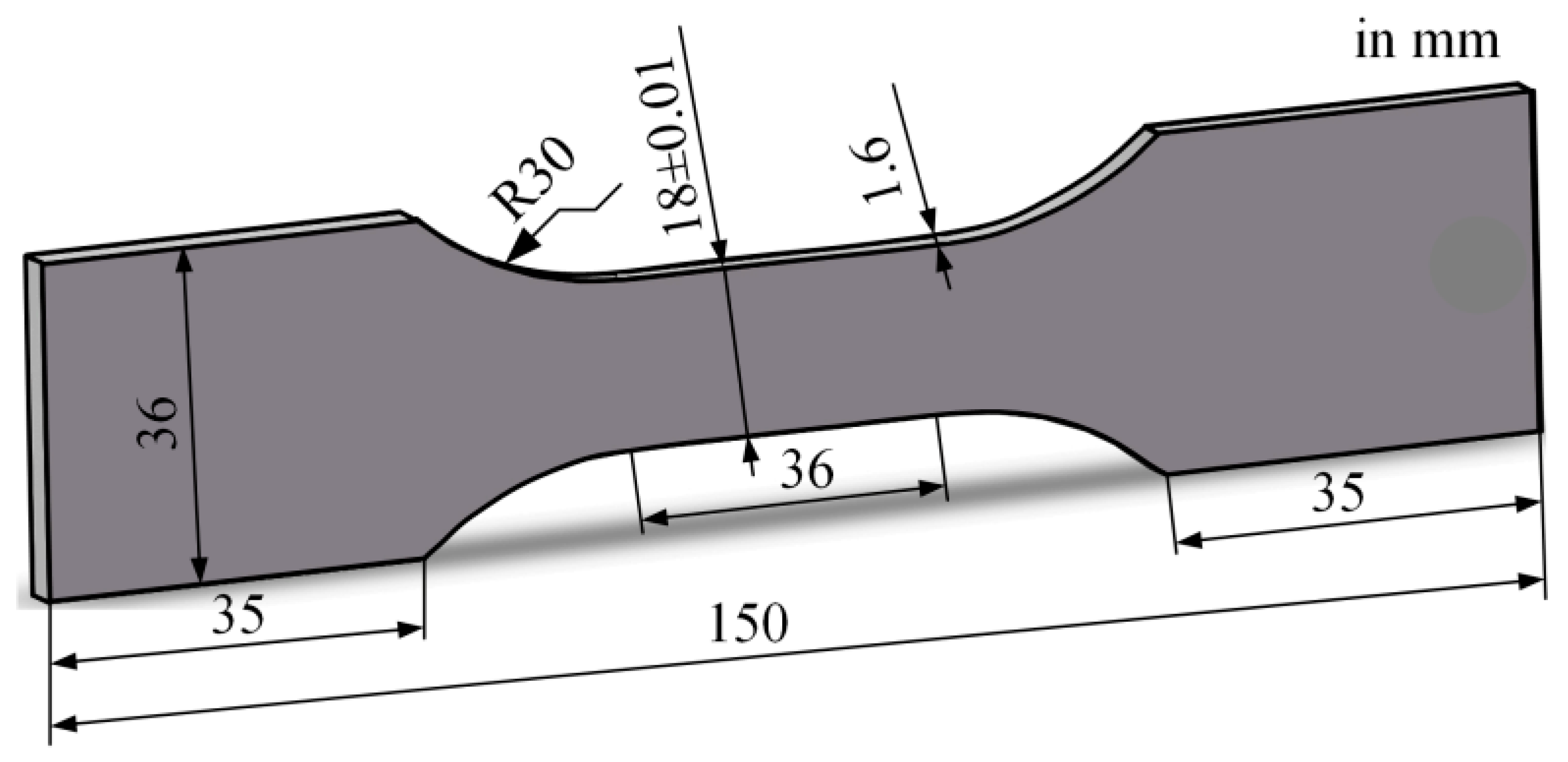
2.1. Material and Experiments
2.2. Overview of Fatigue Mechanics and Physical Models
3. Methodology: Integrating Machine Learning with Physical Model
3.1. Machine Learning Model
3.1.1. Support Vector Machine
3.1.2. Random Forest
3.1.3. Extreme Gradient Boosting
3.2. Particle Swarm Optimization
3.3. Model Evaluation Criteria
3.4. Model Integration Strategy
4. Results and Discussion
4.1. Fatigue Life Prediction Results and Discussion
4.2. Physical Model Parameter Optimization
5. Conclusions
- (1)
- A physical model was established using the energy method of fracture mechanics. Based on the fatigue fracture characteristics of the 2024-T3 Al alloy, the failure mechanism under the coupling effect of dislocation slip and surface roughness was revealed. Then, the fatigue life prediction equation was established by considering the energy changes during the fatigue crack initiation and propagation. The parameters of the equation include material constants and fracture toughness.
- (2)
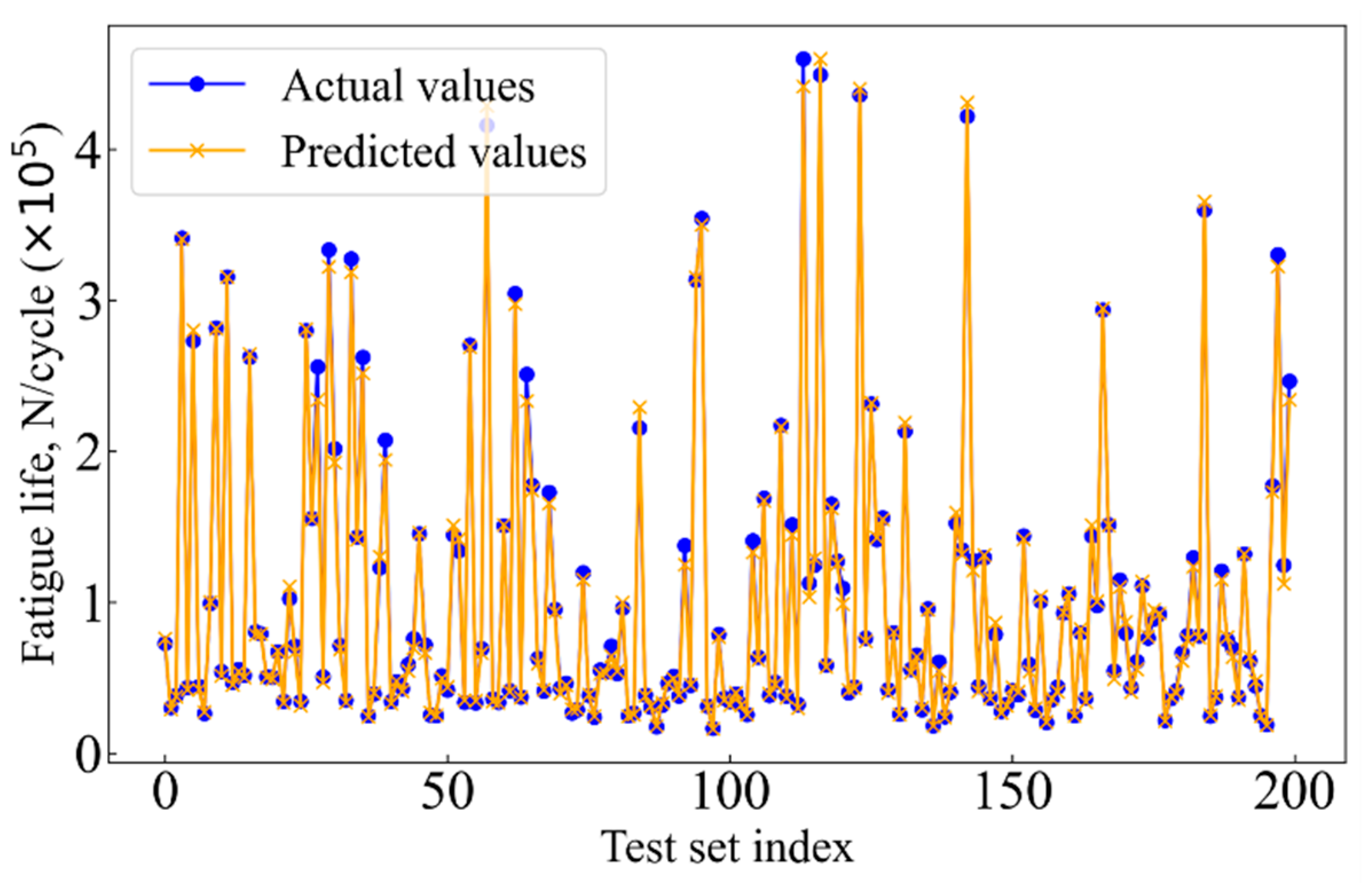
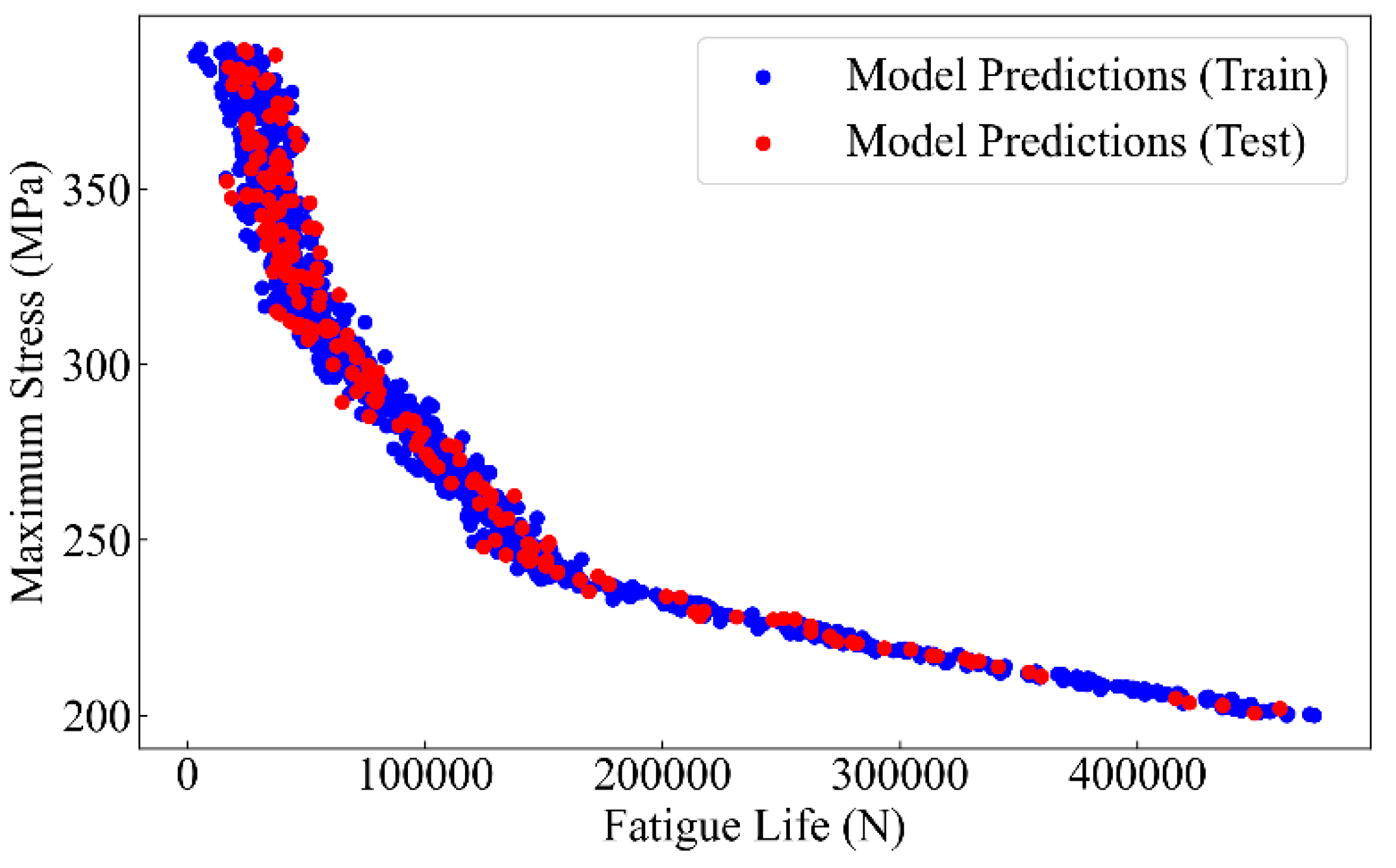
- The combination of PSO and XGBoost improved the prediction accuracy of the fatigue life of the 2024-T3 Al alloy. By analyzing the accuracy of RF, SVM, and XGBoost in the fatigue life prediction, it is found that the XG-Boost possesses a high R2 and low MAPE. Thus, the XGBoost model was selected to predict the fatigue life. Subsequently, the PSO algorithm was employed to optimize the hyperparameters of the XG-Boost model, resulting in improved prediction accuracy.
- (3)
- A physical equation for predicting the fatigue life of the 2024-T3 Al alloy was proposed. Using the fatigue life predictions from the PSO-XGBoost model, the key parameters of the physical fatigue life prediction model were determined. The values of the parameters align with existing experimental data for the 2024-T3 Al alloy. This implied that the physical model of fatigue life proposed in this study is reasonable.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| XGBoost | Extreme Gradient Boosting | Nf | Fatigue Life |
| SVM | Support Vector Machine | G | Energy Release Rate |
| RF | Random Forest | R2 | Coefficient of Determination |
| PSO | Particle Swarm Optimization | RMSE | Root Mean Square Error |
| SEM | Scanning Electron Microscope | MAPE | Mean Absolute Percentage Error |
| Ra | Surface Roughness | σmax | Maximum Cyclic Stress |
| E | Elastic Modulus | a | Crack Length |
| σb | Tensile Strength | ΔK | Stress Intensity Factor |
| σS | Yield Strength | Y | Shape Factor |
| ΔKIC | Stress Intensity Factor Range | kt | Stress Concentration Coefficient |
References
- Zhong, X.-C.; Xie, R.-K.; Qin, S.-H.; Zhang, K.-S. A process-data-driven BP neural network model for predicting interval-valued fatigue life of metals. Eng. Fract. Mech. 2022, 276, 108918. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, Z.; Sha, A.; Hao, W. Low cycle fatigue life prediction of titanium alloy using genetic algorithm-optimized BP artificial neural network. Int. J. Fatigue 2023, 172, 107609. [Google Scholar] [CrossRef]
- Song, H.; Liu, J.; Zhang, H.; Du, J. Multi-source data driven fatigue failure analysis and life prediction of pre-corroded aluminum–lithium alloy 2050-T8. Eng. Fract. Mech. 2023, 292, 109626. [Google Scholar] [CrossRef]
- Fan, J.-L.; Zhu, G.; Zhu, M.-L.; Xuan, F.-Z. A data-physics integrated approach to life prediction in very high cycle fatigue regime. Int. J. Fatigue 2023, 176, 107917. [Google Scholar] [CrossRef]
- Zhou, C.; Wang, H.; Hou, S.; Han, Y. A hybrid physics-based and data-driven method for gear contact fatigue life prediction. Int. J. Fatigue 2023, 175, 107763. [Google Scholar] [CrossRef]
- Nowell, D.; Nowell, P. A machine learning approach to the prediction of fretting fatigue life. Tribol. Int. 2020, 141, 105913. [Google Scholar] [CrossRef]
- Lian, Z.; Li, M.; Lu, W. Fatigue life prediction of aluminum alloy via knowledge-based machine learning. Int. J. Fatigue 2022, 157, 106716. [Google Scholar] [CrossRef]
- Cui, H.; Han, Q. Fatigue Damage Mechanism and Fatigue Life Prediction of Metallic Materials. Metals 2023, 13, 1752. [Google Scholar]
- Kashyzadeh, K.R.; Ghorbani, S. New neural network-based algorithm for predicting fatigue life of aluminum alloys in terms of machining parameters. Eng. Fail. Anal. 2023, 146, 107128. [Google Scholar] [CrossRef]
- Chen, H.; Yao, S.; Yang, Y.; Li, Y.; Xu, S.; Zhang, R. Fatigue Life Prediction of Aluminum Alloys Based on Surface and Internal Defects. J. Mater. Eng. Perform. 2023, 32, 8687–8699. [Google Scholar] [CrossRef]
- Chabouk, E.; Shariati, M.; Kadkhodayan, M.; Masoudi Nejad, R. Fatigue assessment of 2024-T351 aluminum alloy under uniaxial cyclic loading. J. Mater. Eng. Perform. 2021, 30, 2864–2875. [Google Scholar] [CrossRef]
- Cauthen, C.; Anderson, K.; Avery, D.; Baker, A.; Williamson, C.; Daniewicz, S.; Jordan, J.B. Fatigue crack nucleation and microstructurally small crack growth mechanisms in high strength aluminum alloys. Int. J. Fatigue 2020, 140, 105790. [Google Scholar] [CrossRef]
- Wisner, B.; Kontsos, A. Investigation of particle fracture during fatigue of aluminum 2024. Int. J. Fatigue 2018, 111, 33–43. [Google Scholar] [CrossRef]
- Zhan, Z.; Hu, W.; Meng, Q. Data-driven fatigue life prediction in additive manufactured titanium alloy: A damage mechanics based machine learning framework. Eng. Fract. Mech. 2021, 252, 107850. [Google Scholar] [CrossRef]
- Sai, N.J.; Rathore, P.; Chauhan, A. Machine learning-based predictions of fatigue life for multi-principal element alloys. Scr. Mater. 2023, 226, 115214. [Google Scholar] [CrossRef]
- He, L.; Wang, Z.; Akebono, H.; Sugeta, A. Machine learning-based predictions of fatigue life and fatigue limit for steels. J. Mater. Sci. Technol. 2021, 90, 9–19. [Google Scholar] [CrossRef]
- Zhang, X.-C.; Gong, J.-G.; Xuan, F.-Z. A deep learning based life prediction method for components under creep, fatigue and creep-fatigue conditions. Int. J. Fatigue 2021, 148, 106236. [Google Scholar] [CrossRef]
- Zhang, J.; Zhu, J.; Guo, W.; Guo, W. A machine learning-based approach to predict the fatigue life of three-dimensional cracked specimens. Int. J. Fatigue 2022, 159, 106808. [Google Scholar] [CrossRef]
- Pałczyński, K.; Skibicki, D.; Pejkowski, Ł.; Andrysiak, T. Application of machine learning methods in multiaxial fatigue life prediction. Fatigue Fract. Eng. Mater. Struct. 2023, 46, 416–432. [Google Scholar] [CrossRef]
- Zhan, Z.; Li, H. A novel approach based on the elastoplastic fatigue damage and machine learning models for life prediction of aerospace alloy parts fabricated by additive manufacturing. Int. J. Fatigue 2021, 145, 106089. [Google Scholar] [CrossRef]
- Raja, A.; Chukka, S.T.; Jayaganthan, R. Prediction of fatigue crack growth behaviour in ultrafine grained al 2014 alloy using machine learning. Metals 2020, 10, 1349. [Google Scholar] [CrossRef]
- Wang, L.; Zhu, S.-P.; Luo, C.; Liao, D.; Wang, Q. Physics-guided machine learning frameworks for fatigue life prediction of AM materials. Int. J. Fatigue 2023, 172, 107658. [Google Scholar] [CrossRef]
- Hu, M.; Tan, Q.; Knibbe, R.; Xu, M.; Jiang, B.; Wang, S.; Li, X.; Zhang, M. Recent applications of machine learning in alloy design: A review. Mater. Sci. Eng. R Rep. 2023, 155, 100746. [Google Scholar] [CrossRef]
- Li, H.; Zhang, J.; Hu, L.; Su, K. Notch fatigue life prediction of micro-shot peened 25CrMo4 alloy steel: A comparison between fracture mechanics and machine learning methods. Eng. Fract. Mech. 2023, 277, 108992. [Google Scholar] [CrossRef]
- Wang, H.; Li, B.; Xuan, F.-Z. Fatigue-life prediction of additively manufactured metals by continuous damage mechanics (CDM)-informed machine learning with sensitive features. Int. J. Fatigue 2022, 164, 107147. [Google Scholar] [CrossRef]
- Wang, H.; Li, B.; Gong, J.; Xuan, F.-Z. Machine learning-based fatigue life prediction of metal materials: Perspectives of physics-informed and data-driven hybrid methods. Eng. Fract. Mech. 2023, 284, 109242. [Google Scholar] [CrossRef]
- Dai, W.; Liu, Z.; Li, C.; He, D.; Jia, D.; Zhang, Y.; Tan, Z. Fatigue life of micro-arc oxidation coated AA2024-T3 and AA7075-T6 alloys. Int. J. Fatigue 2019, 124, 493–502. [Google Scholar] [CrossRef]
- Fu, R.; Ling, C.; Zheng, L.; Zhong, Z.; Hong, Y. Continuum damage mechanics-based fatigue life prediction of L-PBF Ti-6Al-4V. Int. J. Mech. Sci. 2024, 273, 109233. [Google Scholar] [CrossRef]
- Dai, W.; Zhang, C.; Guo, C.; Li, Z.; Yue, H.; Li, Q.; Zhang, J.; Shang, Z. Effect of grit blasting on fatigue behavior of 2024-T3 aero Al alloy. J. Mater. Res. Technol. 2024, 32, 519–529. [Google Scholar] [CrossRef]
- Suraratchai, M.; Limido, J.; Mabru, C.; Chieragatti, R. Modelling the influence of machined surface roughness on the fatigue life of aluminium alloy. Int. J. Fatigue 2008, 30, 2119–2126. [Google Scholar] [CrossRef]
- Pegues, J.; Roach, M.; Williamson, R.S.; Shamsaei, N. Surface roughness effects on the fatigue strength of additively manufactured Ti-6Al-4V. Int. J. Fatigue 2018, 116, 543–552. [Google Scholar] [CrossRef]
- Li, C.; Dai, W.; Zhang, H.; Liu, Y.; Zhang, Y. Effect of initial forging temperature on mechanical properties and fatigue behavior of EA4T steel. Eng. Fract. Mech. 2020, 238, 107287. [Google Scholar] [CrossRef]
- Tanaka, K.; Mura, T. A dislocation model for fatigue crack initiation. J. Appl. Mech. Mar. 1981, 48, 97–103. [Google Scholar] [CrossRef]
- Lavogiez, C.; Dureau, C.; Nadot, Y.; Villechaise, P.; Hémery, S. Crack initiation mechanisms in Ti-6Al-4V subjected to cold dwell-fatigue, low-cycle fatigue and high-cycle fatigue loadings. Acta Mater. 2023, 244, 118560. [Google Scholar] [CrossRef]
- Verma, R.; Kumar, P.; Jayaganthan, R.; Pathak, H. Extended finite element simulation on Tensile, fracture toughness and fatigue crack growth behaviour of additively manufactured Ti6Al4V alloy. Theor. Appl. Fract. Mech. 2022, 117, 103163. [Google Scholar] [CrossRef]
- Carpinteri, A.; Montagnoli, F. Scaling and fractality in subcritical fatigue crack growth: Crack-size effects on Paris′ law and fatigue threshold. Fatigue Fract. Eng. Mater. Struct. 2020, 43, 788–801. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y.; Sun, Q.; Liu, S.; Shi, B.; Lu, H. Giga-fatigue life prediction of FV520B-I with surface roughness. Mater. Des. 2016, 89, 1028–1034. [Google Scholar] [CrossRef]
- Moghaddam, T.B.; Soltani, M.; Shahraki, H.S.; Shamshirband, S.; Noor, N.B.M.; Karim, M.R. The use of SVM-FFA in estimating fatigue life of polyethylene terephthalate modified asphalt mixtures. Measurement 2016, 90, 526–533. [Google Scholar] [CrossRef]
- Li, A.; Baig, S.; Liu, J.; Shao, S.; Shamsaei, N. Defect criticality analysis on fatigue life of L-PBF 17-4 PH stainless steel via machine learning. Int. J. Fatigue 2022, 163, 107018. [Google Scholar] [CrossRef]
- Gan, L.; Wu, H.; Zhong, Z. Fatigue life prediction considering mean stress effect based on random forests and kernel extreme learning machine. Int. J. Fatigue 2022, 158, 106761. [Google Scholar] [CrossRef]
- Gao, T.; Zhan, Z.; Hu, W.; Meng, Q. A novel damage mechanics and XGBoost based approach for HCF life prediction of cast magnesium alloy considering internal defect characteristics. Int. J. Fatigue 2024, 182, 108220. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, X.; Shangguan, W.B. Fatigue life prediction of natural rubber components using an artificial neural network. Fatigue Fract. Eng. Mater. Struct. 2022, 45, 1678–1689. [Google Scholar] [CrossRef]
- Wang, Q.; Yao, G.; Kong, G.; Wei, L.; Yu, X.; Jianchuan, Z.; Luo, L. A data-driven model for predicting fatigue performance of high-strength steel wires based on optimized XGBOOST. In Engineering Failure Analysis; Elsevier: Amsterdam, The Netherlands, 2024; p. 108710. [Google Scholar]
- Morales, J.L.; Nocedal, J. Remark on “Algorithm 778: L-BFGS-B: Fortran subroutines for large-scale bound constrained optimization”. ACM Trans. Math. Softw. (TOMS) 2011, 38, 1–4. [Google Scholar] [CrossRef]
- Gairola, S.; Verma, R.; Jayaganthan, R. Study on fatigue and fracture behavior of Al 2024 alloy through XFEM and stress-life approach. Procedia Struct. Integr. 2023, 46, 182–188. [Google Scholar] [CrossRef]
- Wang, S.; Li, N.; Chi, X. Dynamic Fractural Toughness of 2024-T3 Aluminum Alloy. J. Netshape Form. Eng. 2017, 9, 72–78. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cu | Si | Fe | Mn | Mg | Zn | Cr | Ti | Other | Al |
|---|---|---|---|---|---|---|---|---|---|
| 3.8~4.9 | 0.5 | 0.5 | 0.3~0.9 | 1.2~1.8 | 0.25 | 0.1 | 0.15 | 0.15 | Other |
| Elastic Modulus E (GPa) | Tensile Strength σb (MPa) | Yield Strength σS (MPa) | Elongation δ (%) |
|---|---|---|---|
| 74.0 | 466 | 333 | 22.8 |
| Minimum (N) | Maximum (N) | Mean (N) | Median (N) | Standard Deviation (N) |
|---|---|---|---|---|
| 15,161.00 | 827,501.00 | 141,953.15 | 76,693.00 | 174,688.49 |
| ML Model | R2 | MAPE [%] |
|---|---|---|
| RF | 0.91 | 22.34 |
| SVM | 0.88 | 26.77 |
| XGBoost | 0.93 | 16.34 |
| ML Model | R2 | MAPE [%] |
|---|---|---|
| XGBoost | 0.93 | 16.34 |
| PSO-XGBoost | 0.96 | 11.89 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Yue, H.; Zhang, C.; Dai, W.; Guo, C.; Li, Q.; Zhang, J. Fatigue Life Prediction of 2024-T3 Al Alloy by Integrating Particle Swarm Optimization—Extreme Gradient Boosting and Physical Model. Materials 2024, 17, 5332. https://doi.org/10.3390/ma17215332
Li Z, Yue H, Zhang C, Dai W, Guo C, Li Q, Zhang J. Fatigue Life Prediction of 2024-T3 Al Alloy by Integrating Particle Swarm Optimization—Extreme Gradient Boosting and Physical Model. Materials. 2024; 17(21):5332. https://doi.org/10.3390/ma17215332
Chicago/Turabian StyleLi, Zhaoji, Haitao Yue, Ce Zhang, Weibing Dai, Chenguang Guo, Qiang Li, and Jianzhuo Zhang. 2024. "Fatigue Life Prediction of 2024-T3 Al Alloy by Integrating Particle Swarm Optimization—Extreme Gradient Boosting and Physical Model" Materials 17, no. 21: 5332. https://doi.org/10.3390/ma17215332
APA StyleLi, Z., Yue, H., Zhang, C., Dai, W., Guo, C., Li, Q., & Zhang, J. (2024). Fatigue Life Prediction of 2024-T3 Al Alloy by Integrating Particle Swarm Optimization—Extreme Gradient Boosting and Physical Model. Materials, 17(21), 5332. https://doi.org/10.3390/ma17215332