Automatic High-Resolution Operational Modal Identification of Thin-Walled Structures Supported by High-Frequency Optical Dynamic Measurements



Abstract

1. Introduction
2. Noise-Robust High-Resolution Modal Identification Method
2.1. Classical Frequency Domain Operational Modal Analysis
2.1.1. Peak Picking Method (PP)
2.1.2. Enhanced Frequency Domain Decomposition Method (EFDD)
2.1.3. Least-Squares Complex Frequency Domain Method (LSCF)
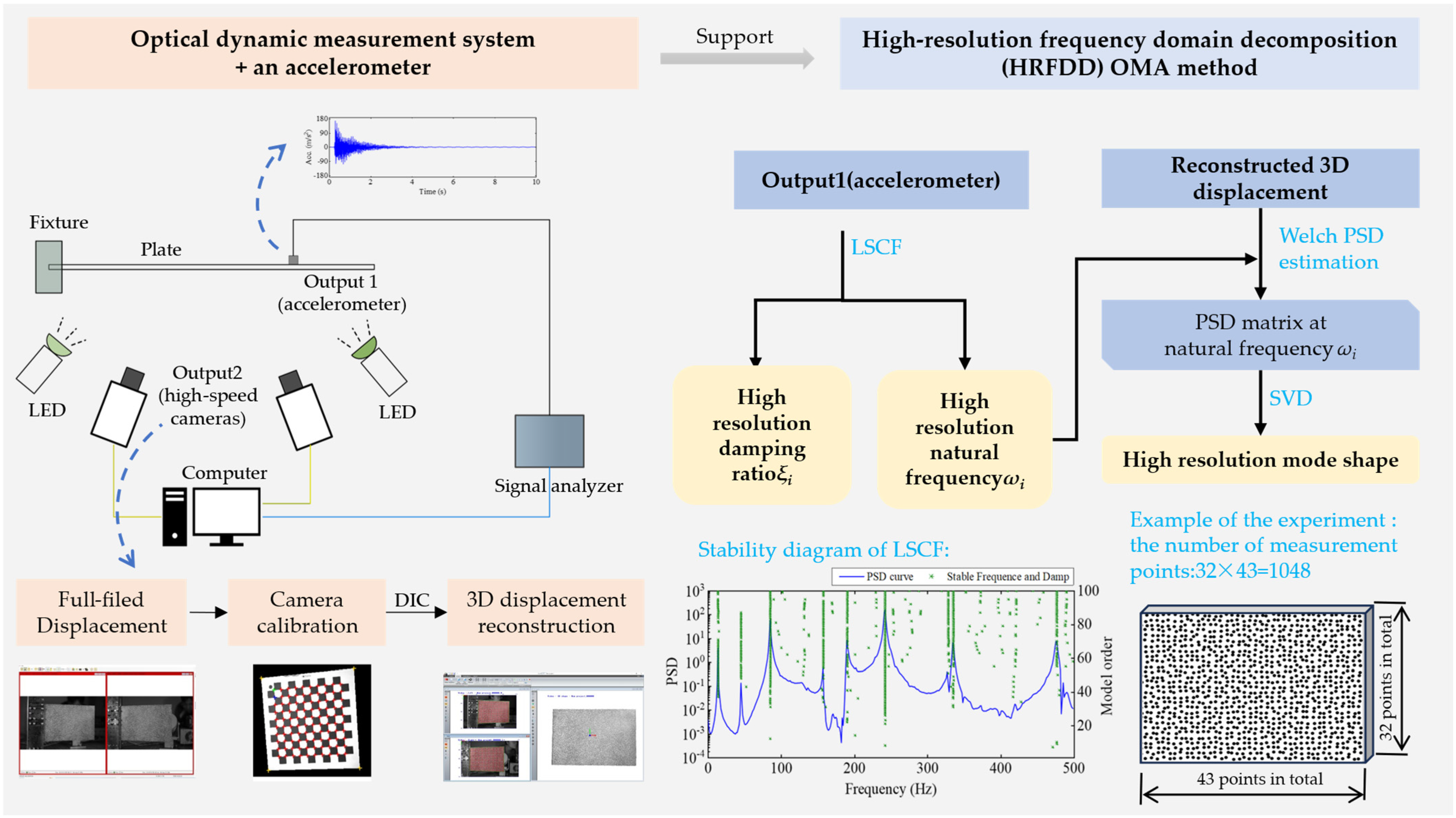
2.2. High-Resolution Frequency Domain Decomposition Method (HRFDD)
3. The Automatic Identification Method Based on the Clustering Algorithm
3.1. DBSCAN Algorithm
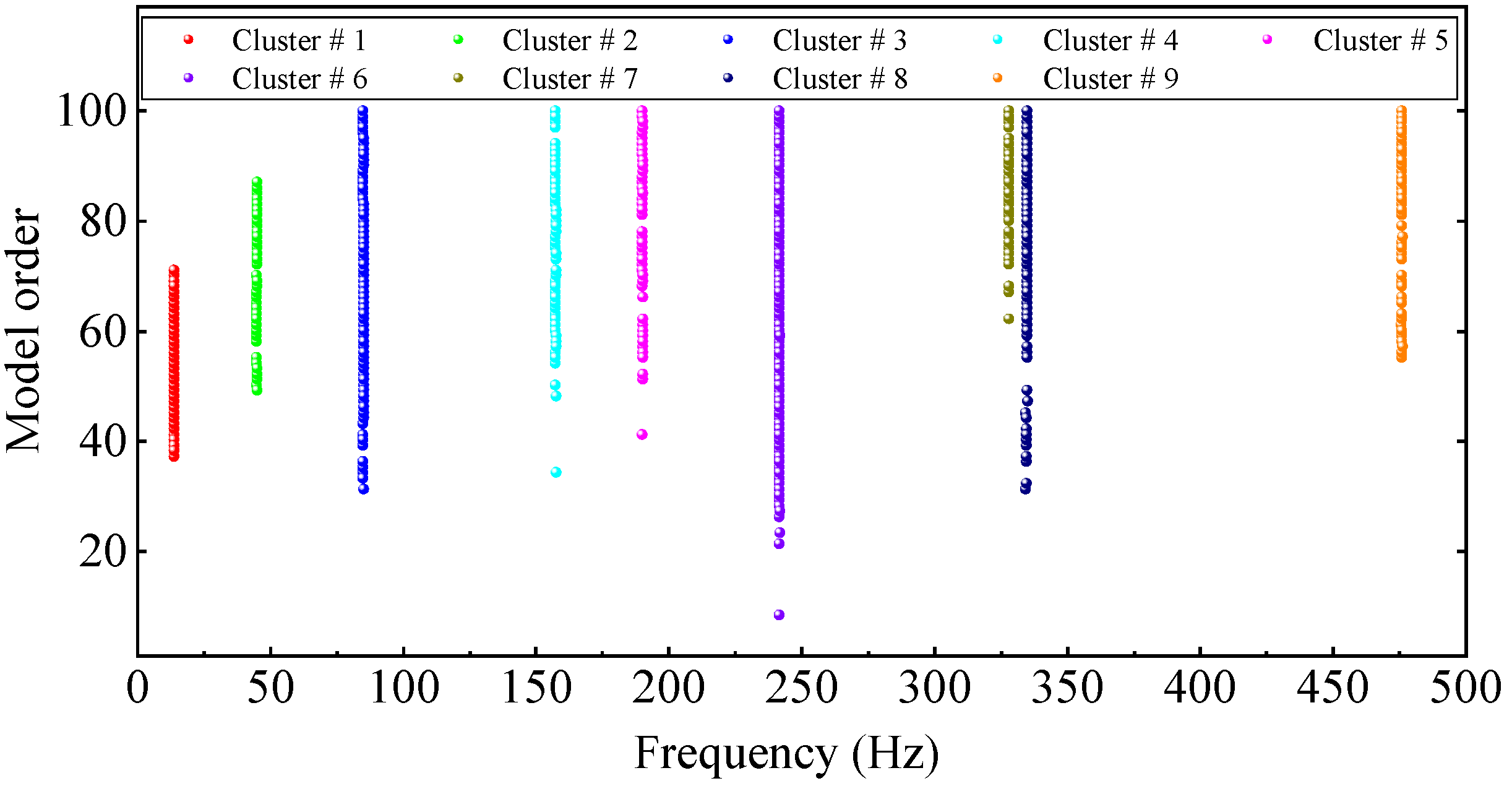
3.2. Automatic Selection of Stability Poles Based on Density Clustering Algorithm
3.2.1. Modal Distance
3.2.2. Parameter Determination
3.2.3. Clustering Procedure
| Algorithm 1 Removing the noise points through DBSCAN algorithm |
| Input: Dataset data_points (stable points) D, radius Eps, minimum points MinPts |
| Output: Cluster labels for each data point |
| 1 mark all data_points as “unvisited” and set the cluster index cluster_index = 0; |
| % Initialize all data_points |
| 2 for each point in data_points: |
| if point is unvisited: |
| mark point as visited |
| % Find neighbors of the point within radius Eps |
| neighbors = find_neighbors(point, data_points, Eps) |
| % If the point is a core point (has at least MinPts neighbors) |
| if len(neighbors) ≥ MinPts: |
| % Increment cluster index |
| cluster_index = cluster_index + 1 |
| % Expand cluster from the core point |
| expand_cluster(point, neighbors, cluster_index) |
| end for; |
| 3 set the cluster index to all points that were not assigned to a cluster cluster_index = −1; |
| % label noise points |
| Algorithm 2 Eliminating false poles based on the Three Sigma Criterion |
| Input: The number of stable points in each cluster Ni |
| Output: The clusters of true poles |
| 1 The number of stable points in each cluster after clustering is regarded as a group of data to be inspected; |
| 2 Find the mean and standard deviation of the data to be examined; |
| ; |
| 4 Iterate over each cluster: |
| for each cluster |
| mark it as cluster of false pole |
| end if |
| end for |
| 5 Eliminate the cluster of false pole and find the clusters of true poles |
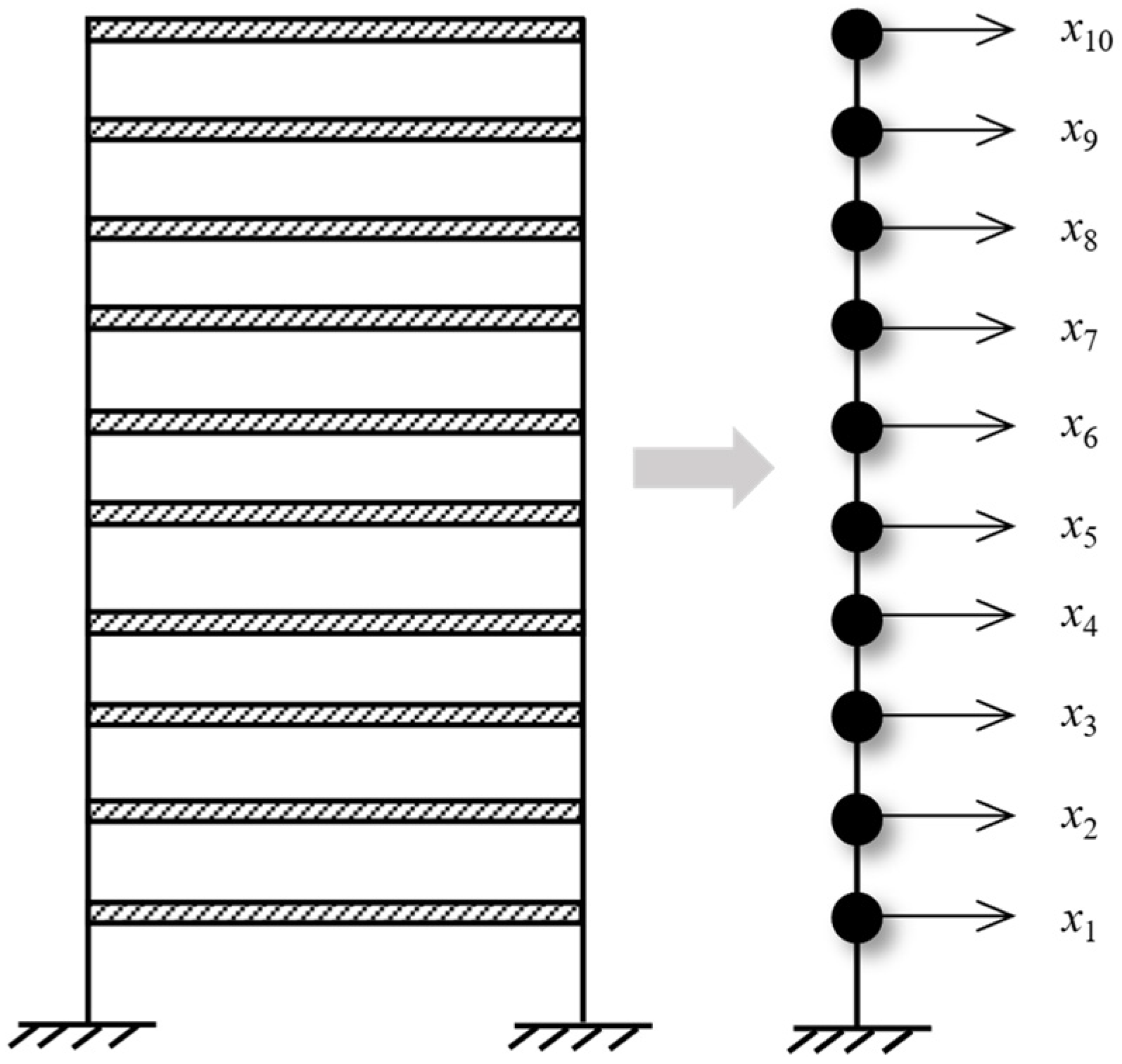
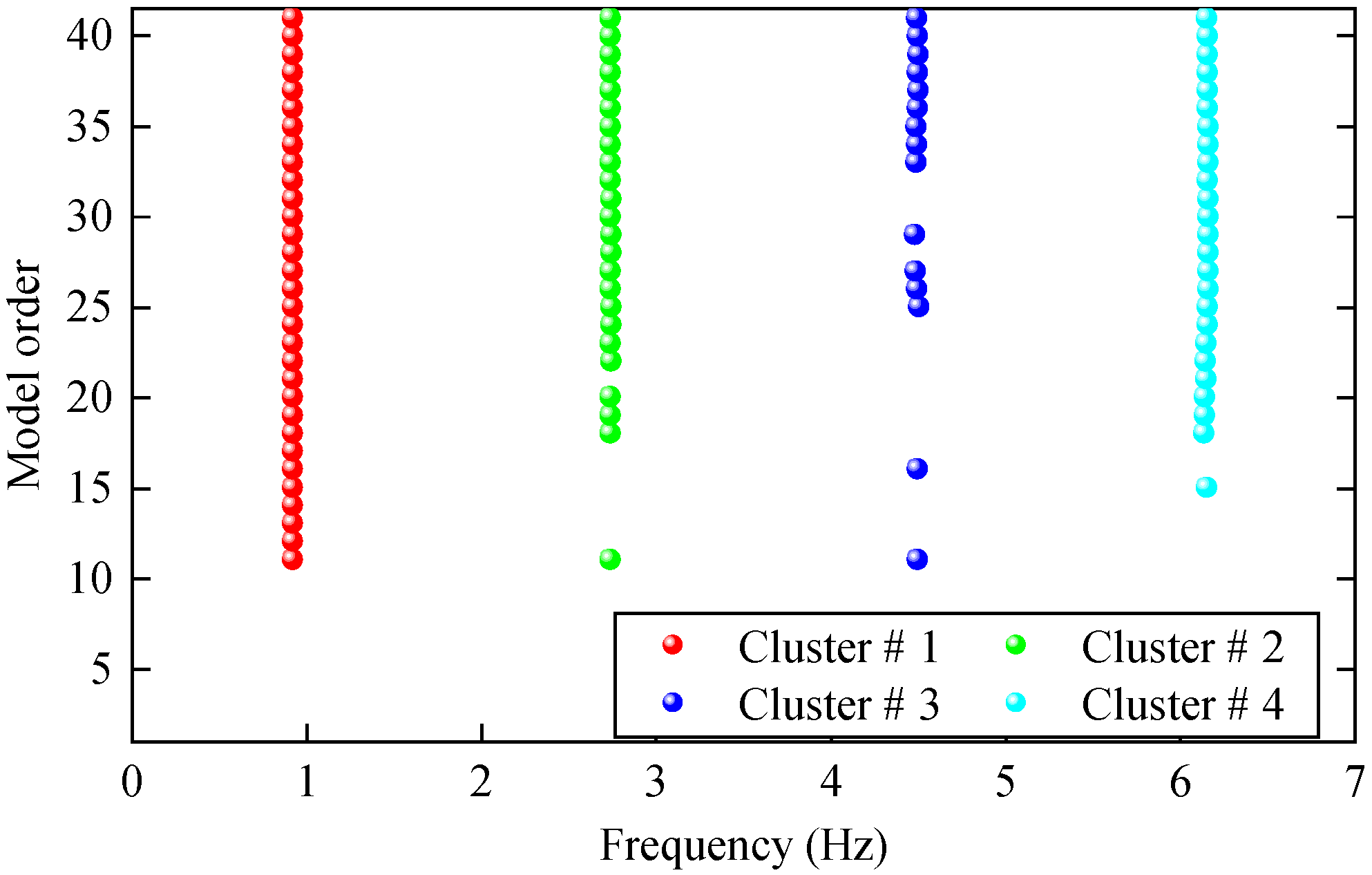
3.3. Numerical Simulation Verification
4. Modal Analysis of Rectangular Aluminum Plates
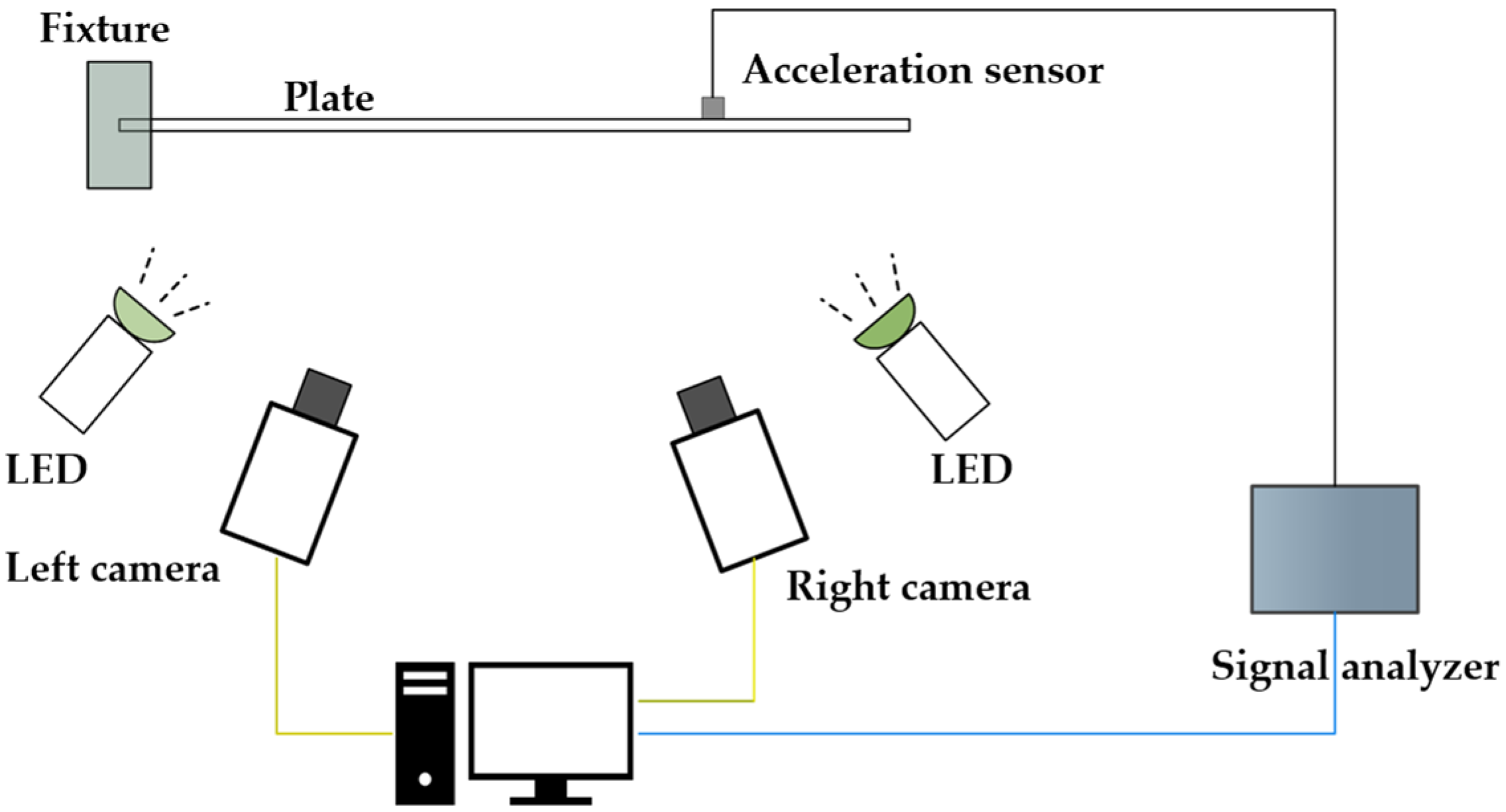
4.1. Experimental Setup and Tests
4.2. Experimental Modal Analysis
4.3. Operational Modal Identification Based on Optical Dynamic Measurement
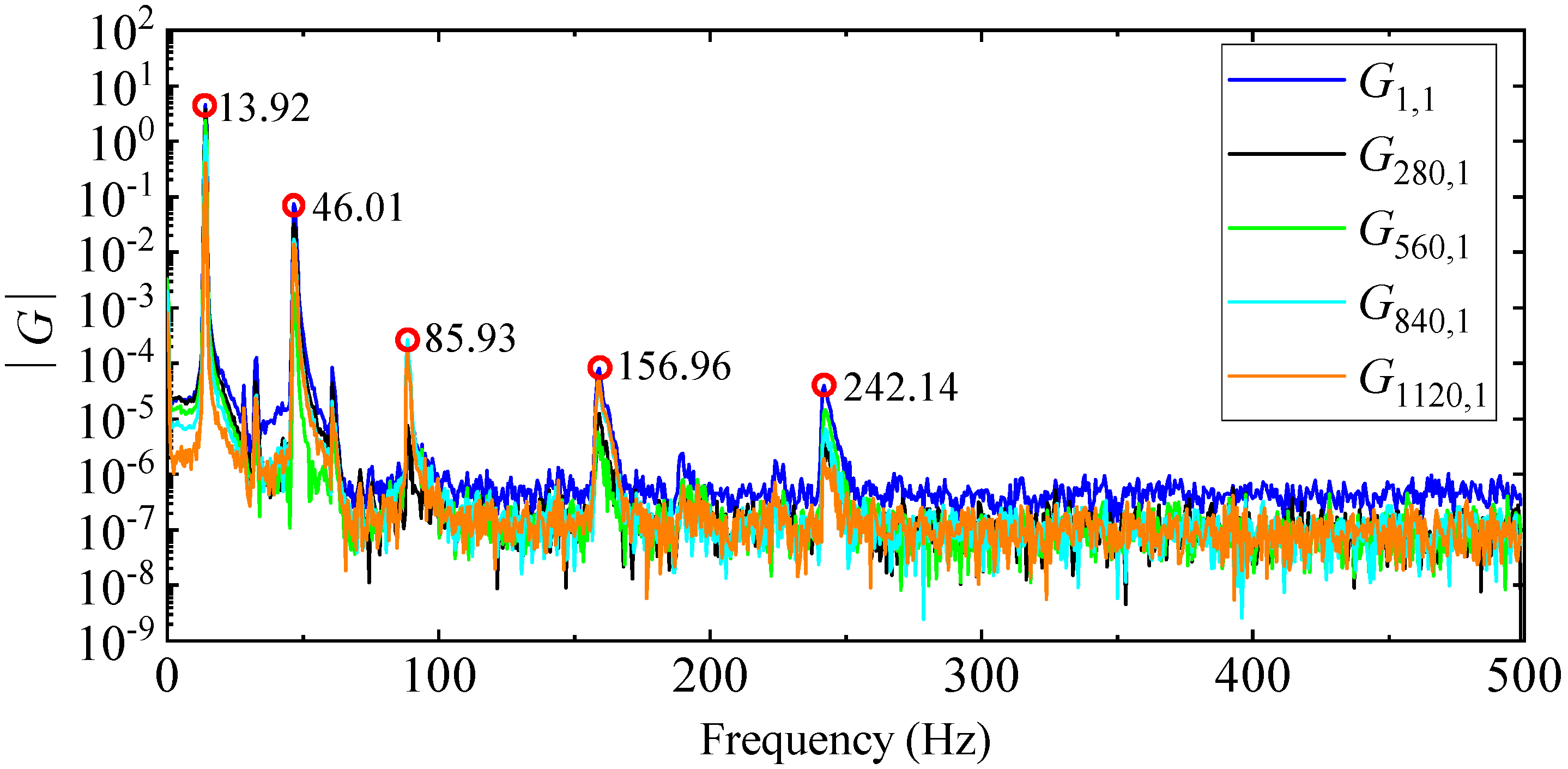
4.3.1. PP Method
4.3.2. EFDD Method
4.3.3. LSCF Method
4.4. The Improved Operating Modal Analysis Approach
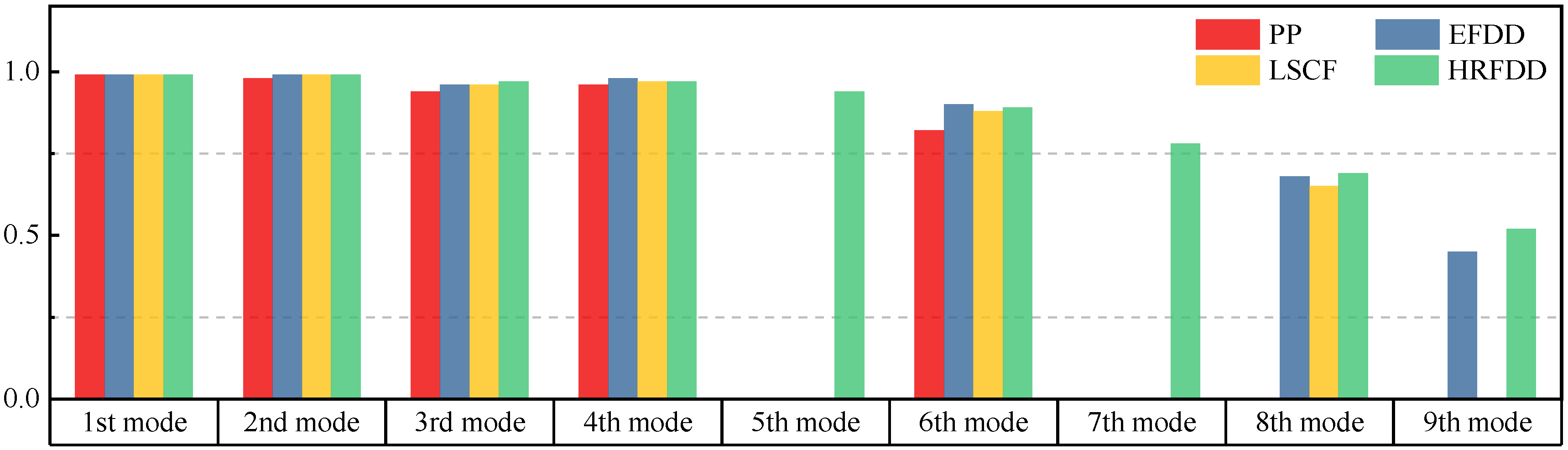
4.5. Comparison and Analysis of Results
5. Conclusions
- The experiments demonstrate that the classical OMA frequency domain method cannot accurately and efficiently identify all modes of the cantilever aluminum plate in the frequency range of 0~500 Hz from optical measurement data with low signal-to-noise ratios and short acquisition times;
- The HRFDD method proposed in this paper has a higher accuracy and completeness of modal identification, and can identify all modes of the plate in the range of 0~500 Hz with high accuracy and no missing;
- The experiments show that the HRFDD method greatly improves computational efficiency compared with the classical OMA frequency domain method, essentially meeting the requirements for real-time online monitoring. It can be applied to structural health monitoring;
- Numerical simulation and laboratory experiments indicate that the real poles automatic selection method constructed by integrating the DBSCAN and the three sigma criterion has further enhanced the usage efficiency of the HRFDD.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mou, W.; Zhu, S.; Jiang, Z.; Song, G. Vibration Signal-Based Chatter Identification for Milling of Thin-Walled Structure. Chin. J. Aeronaut. 2022, 35, 204–214. [Google Scholar] [CrossRef]
- Furtado, A.; Rodrigues, H.; Arêde, A.; Varum, H. A Experimental Characterization of Seismic plus Thermal Energy Retrofitting Techniques for Masonry Infill Walls. J. Build. Eng. 2023, 75, 106854. [Google Scholar] [CrossRef]
- Bosbach, S.; Hegger, J.; Classen, M. Compression Softening of Textile CFRP Reinforced Concrete (CRC): Biaxial Testing of Cracked CRC Panels and Derivation of Constitutive Laws. Constr. Build. Mater. 2024, 444, 137739. [Google Scholar] [CrossRef]
- Cao, H.; Yue, Y.; Chen, X.; Zhang, X. Chatter Detection Based on Synchrosqueezing Transform and Statistical Indicators in Milling Process. Int. J. Adv. Manuf. Technol. 2018, 95, 961–972. [Google Scholar] [CrossRef]
- Nicoletti, V.; Arezzo, D.; Carbonari, S.; Gara, F. Vibration-Based Tests and Results for the Evaluation of Infill Masonry Walls Influence on the Dynamic Behaviour of Buildings: A Review. Arch. Comput. Methods Eng. 2022, 29, 3773–3787. [Google Scholar] [CrossRef]
- Magalhães, F.; Caetano, E.; Cunha, Á. Operational Modal Analysis and Finite Element Model Correlation of the Braga Stadium Suspended Roof. Eng. Struct. 2008, 30, 1688–1698. [Google Scholar] [CrossRef]
- Brincker, R. Some Elements of Operational Modal Analysis. Shock. Vib. 2014, 2014, 1–11. [Google Scholar] [CrossRef]
- Wang, T.; Celik, O.; Catbas, F.N.; Zhang, L.M. A Frequency and Spatial Domain Decomposition Method for Operational Strain Modal Analysis and Its Application. Eng. Struct. 2016, 114, 104–112. [Google Scholar] [CrossRef]
- Yin, T.; Zhou, G.; Qu, C.; Li, H. Intercoordination theory of testing and identification for structural operational modes. China Civ. Eng. J. 2020, 53, 72–81+88. [Google Scholar] [CrossRef]
- Rao, S.S. Mechanical Vibrations, 5th ed.; Pearson: Upper Saddle River, NJ, USA, 2010; ISBN 978-0-13-212819-3. [Google Scholar]
- Modesti, M.; Reynders, E.; Lombaert, G.; Palermo, A.; Gentilini, C. Damage Detection in Beam Structures Based on Curvature Change Estimated from Incomplete Mode Shapes. J. Phys. Conf. Ser. 2024, 2647, 182019. [Google Scholar] [CrossRef]
- Modesti, M.; Gentilini, C.; Palermo, A.; Reynders, E.; Lombaert, G. A Two-Step Procedure for Damage Detection in Beam Structures with Incomplete Mode Shapes. J. Civ. Struct. Health Monit. 2024. [Google Scholar] [CrossRef]
- Casazza, M.; Barone, F.; Bonisoli, E.; Dimauro, L.; Venturini, S.; Masoero, M.C.; Shtrepi, L. A Procedure for the Characterization of a Music Instrument Vibro-Acoustic Fingerprint: The Case of a Contemporary Violin. Acta IMEKO 2023, 12, 1–6. [Google Scholar] [CrossRef]
- Bonisoli, E.; Dimauro, L.; Venturini, S.; Cavallaro, S.P. Experimental Detection of Nonlinear Dynamics Using a Laser Profilometer. Appl. Sci. 2023, 13, 3295. [Google Scholar] [CrossRef]
- Gorjup, D.; Slavič, J.; Babnik, A.; Boltežar, M. Still-Camera Multiview Spectral Optical Flow Imaging for 3D Operating-Deflection-Shape Identification. Mech. Syst. Signal Process. 2021, 152, 107456. [Google Scholar] [CrossRef]
- Zaletelj, K.; Gorjup, D.; Slavič, J.; Boltežar, M. Multi-Level Curvature-Based Parametrization and Model Updating Using a 3D Full-Field Response. Mech. Syst. Signal Process. 2023, 187, 109927. [Google Scholar] [CrossRef]
- Sutton, M.A.; Orteu, J.J.; Schreier, H. Image Correlation for Shape, Motion and Deformation Measurements: Basic Concepts, Theory and Applications; Springer Science & Business Media: New York, NY, USA, 2009; ISBN 978-0-387-78747-3. [Google Scholar]
- Ha, N.S.; Vang, H.M.; Goo, N.S. Modal Analysis Using Digital Image Correlation Technique: An Application to Artificial Wing Mimicking Beetle’s Hind Wing. Exp. Mech. 2015, 55, 989–998. [Google Scholar] [CrossRef]
- Poozesh, P.; Baqersad, J.; Niezrecki, C.; Avitabile, P.; Harvey, E.; Yarala, R. Large-Area Photogrammetry Based Testing of Wind Turbine Blades. Mech. Syst. Signal Process. 2017, 86, 98–115. [Google Scholar] [CrossRef]
- Molina-Viedma, Á.; López-Alba, E.; Felipe-Sesé, L.; Díaz, F.; Rodríguez-Ahlquist, J.; Iglesias-Vallejo, M. Modal Parameters Evaluation in a Full-Scale Aircraft Demonstrator under Different Environmental Conditions Using HS 3D-DIC. Materials 2018, 11, 230. [Google Scholar] [CrossRef]
- Kumar, D.; Kamle, S.; Mohite, P.M.; Kamath, G.M. A novel real-time DIC-FPGA-based measurement method for dynamic testing of light and flexible structures. Meas. Sci. Technol. 2019, 30, 045903. [Google Scholar] [CrossRef]
- Cuadrado, M.; Pernas-Sánchez, J.; Artero-Guerrero, J.A.; Varas, D. Model Updating of Uncertain Parameters of Carbon/Epoxy Composite Plates Using Digital Image Correlation for Full-Field Vibration Measurement. Measurement 2020, 159, 107783. [Google Scholar] [CrossRef]
- Frankovský, P.; Delyová, I.; Sivák, P.; Bocko, J.; Živčák, J.; Kicko, M. Modal Analysis Using Digital Image Correlation Technique. Materials 2022, 15, 5658. [Google Scholar] [CrossRef] [PubMed]
- Heylen, W.; Lammens, S.; Sas, P. Modal Analysis Theory and Testing; Katholieke Universiteit Leuven, Faculty of Engineering, Department of Mechanical Engineering, Division of Production Engineering, Machine Design and Automation: Leuven, Belgium, 1998; ISBN 978-90-73802-61-2. [Google Scholar]
- Gao, X. Fuzzy Cluster Analysis and Its Applications; Xidian University Press: Xi’an, China, 2004; ISBN 978-7-5606-1301-7. [Google Scholar]
- Song, M.; Su, L.; Dong, S.; Luo, Y. Summary of methods eliminating spurious modes in automatic modal parametric identification. J. Vib. Shock. 2017, 36, 1–10. [Google Scholar] [CrossRef]
- Civera, M.; Sibille, L.; Zanotti Fragonara, L.; Ceravolo, R. A DBSCAN-Based Automated Operational Modal Analysis Algorithm for Bridge Monitoring. Measurement 2023, 208, 112451. [Google Scholar] [CrossRef]
- Boroschek, R.L.; Bilbao, J.A. Interpretation of Stabilization Diagrams Using Density-Based Clustering Algorithm. Eng. Struct. 2019, 178, 245–257. [Google Scholar] [CrossRef]
- He, Y.; Yang, J.P.; Li, Y.-F. A Three-Stage Automated Modal Identification Framework for Bridge Parameters Based on Frequency Uncertainty and Density Clustering. Eng. Struct. 2022, 255, 113891. [Google Scholar] [CrossRef]
- Ye, C.; Zhao, X. Automated Operational Modal Analysis Based on DBSCAN Clustering. In Proceedings of the 2020 International Conference on Intelligent Transportation, Big Data & Smart City (ICITBS), Vientiane, Laos, 11–12 January 2020; Volume 47, pp. 864–869. [Google Scholar]
- Ren, W.-X.; Zong, Z.-H. Output-Only Modal Parameter Identification of Civil Engineering Structures. Struct. Eng. Mech. 2004, 17, 429–444. [Google Scholar] [CrossRef]
- Brincker, R.; Ventura, C.E.; Andersen, P. Damping Estimation by Frequency Domain Decomposition: The International Modal Analysis Conference. In Proceedings of the IMAC 19, Kissimmee, FL, USA, 5–8 February 2001; pp. 698–703. [Google Scholar]
- Montalvo, C.; Torres, L.A.; García-Berrocal, A. Beam Mode Characterization by Applying Operational Modal Analysis to Neutron Detectors Data. Nucl. Eng. Des. 2021, 385, 111503. [Google Scholar] [CrossRef]
- Parloo, E.; Guillaume, P.; Cauberghe, B. Maximum Likelihood Identification of Non-Stationary Operational Data. J. Sound Vib. 2003, 268, 971–991. [Google Scholar] [CrossRef]
- Peeters, B.; Van der Auweraer, H.; Vanhollebeke, F.; Guillaume, P. Operational Modal Analysis for Estimating the Dynamic Properties of a Stadium Structure during a Football Game. Shock. Vib. 2007, 14, 283–303. [Google Scholar] [CrossRef]
- Welch, P. The Use of Fast Fourier Transform for the Estimation of Power Spectra: A Method Based on Time Averaging over Short, Modified Periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.-P.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2 August 1996; AAAI Press: Portland, OR, USA, 1996; pp. 226–231. [Google Scholar]
- Reynders, E.; Houbrechts, J.; De Roeck, G. Fully Automated (Operational) Modal Analysis. Mech. Syst. Signal Process. 2012, 29, 228–250. [Google Scholar] [CrossRef]
- Pastor, M.; Binda, M.; Harčarik, T. Modal Assurance Criterion. Procedia Eng. 2012, 48, 543–548. [Google Scholar] [CrossRef]
- Allemang, R.J.; Brown, D.L. A Correlation Coefficient for Modal Vetor Analysis. In Proceedings of the IMAC 1, Orlando, FL, USA, 8–10 November 1982; pp. 110–116. [Google Scholar]
- Sun, Q.; Yan, W.; Ren, W. Operation Modal Analysis for Bridge Engineering Based on Power Spectrum Density Transmissibility. China J. Highw. Transp. 2019, 32, 83–90. [Google Scholar] [CrossRef]
- Su, Y.; Zhang, Q. Glare: A Free and Open-Source Software for Generation and Assessment of Digital Speckle Pattern. Opt. Lasers Eng. 2022, 148, 106766. [Google Scholar] [CrossRef]
- Chen, Z.; Shao, X.; Xu, X.; He, X. Optimized Digital Speckle Patterns for Digital Image Correlation by Consideration of Both Accuracy and Efficiency. Appl. Opt. 2018, 57, 884. [Google Scholar] [CrossRef]
- Su, Y.; Gao, Y.; Gao, Z.; Zhang, Q. Glare: A free and open source software for generation and assessment of digital speckle pattern. J. Exp. Mech. 2021, 36, 17–28. [Google Scholar] [CrossRef]
- Ren, Z.; Liu, Y.; Liu, G.; Huang, Z. Improved wavelet denoising with dual-threshold and dual-factor function. J. Comput. Appl. 2013, 33, 2595–2598. [Google Scholar] [CrossRef]
- Schoukens, J.; Pintelon, R. Measurement of frequency response functions in noisy environments. In Proceedings of the 7th IEEE Conference on Instrumentation and Measurement Technology, San Jose, CA, USA, 13–15 February 1990; pp. 373–377. [Google Scholar]
- Jiang, L. Modal Parameter Identification Method of Structure Based on Power-Exponential Window, Dalian University of Technology 2022. Available online: https://kns.cnki.net/KCMS/detail/detail.aspx?dbcode=CMFD&dbname=CMFD202201&filename=1021696722.nh (accessed on 2 April 2024).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode Order | 1st Mode | 2nd Mode | 3rd Mode | 4th Mode | ||||
|---|---|---|---|---|---|---|---|---|
| TV | RV | TV | RV | TV | RV | TV | RV | |
| (Hz) | 0.9213 | 0.9213 | 2.7433 | 2.7431 | 4.5040 | 4.5010 | 6.1640 | 6.1643 |
| (%) | 1 | 1.0021 | 1 | 1.0191 | 1 | 1.0536 | 1 | 1.0130 |
| Mode Order | Natural Frequency (Hz) | Damping Ratio (%) | Mode Shape | Mode Order | Natural Frequency (Hz) | Damping Ratio (%) | Mode Shape | ||
|---|---|---|---|---|---|---|---|---|---|
| LSCF | FEA | LSCF | FEA | LSCF | FEA | LSCF | FEA | ||
| 1st | 13.56 | 13.71 | 0.35 |  | 6th | 242.02 | 245.57 | 0.43 |  |
| 2nd | 45.40 | 45.64 | 0.23 |  | 7th | 328.71 | 316.59 | 0.46 |  |
| 3rd | 85.12 | 85.07 | 0.77 |  | 8th | 335.57 | 337.06 | 0.30 |  |
| 4th | 157.63 | 154.53 | 0.37 |  | 9th | 476.44 | 476.22 | 0.43 |  |
| 5th | 190.25 | 211.79 | 0.55 |  | |||||
| Mode Order | 1st | 2nd | 3rd | 4th | 5th | 6th | 7th | 8th | 9th |
|---|---|---|---|---|---|---|---|---|---|
| (Hz) | 13.58 | 45.41 | 85.16 | 157.69 | 190.25 | 242.12 | 328.99 | 335.63 | 476.68 |
| (%) | 0.34 | 0.24 | 0.77 | 0.37 | 0.54 | 0.46 | 0.42 | 0.32 | 0.46 |
| Mode Order | Natural Frequency Damping Ratio | Reference | HRFDD | PP | EFDD | LSCF |
|---|---|---|---|---|---|---|
| 1st mode | Frequency (Hz) | 13.56 | 13.58 | 13.92 | 13.88 | 13.67 |
| Damping ratio (%) | 0.35 | 0.35 | 0.47 | 0.42 | 0.34 | |
| 2nd mode | Frequency (Hz) | 45.40 | 45.40 | 46.01 | 46.28 | 45.99 |
| Damping ratio (%) | 0.23 | 0.24 | 0.53 | 0.30 | 0.25 | |
| 3rd mode | Frequency (Hz) | 85.12 | 85.14 | 85.93 | 84.97 | 85.64 |
| Damping ratio (%) | 0.77 | 0.78 | 0.69 | 0.74 | 0.68 | |
| 4th mode | Frequency (Hz) | 157.63 | 157.69 | 156.96 | 157.90 | 158.02 |
| Damping ratio (%) | 0.37 | 0.37 | 0.74 | 0.28 | 0.32 | |
| 5th mode | Frequency (Hz) | 190.25 | 190.24 | / | / | / |
| Damping ratio (%) | 0.55 | 0.56 | / | / | / | |
| 6th mode | Frequency (Hz) | 242.02 | 242.09 | 242.14 | 242.67 | 242.81 |
| Damping ratio (%) | 0.43 | 0.45 | 0.48 | 0.36 | 0.52 | |
| 7th mode | Frequency (Hz) | 328.71 | 328.96 | / | / | / |
| Damping ratio (%) | 0.46 | 0.42 | / | / | / | |
| 8th mode | Frequency (Hz) | 335.57 | 335.61 | / | 336.04 | 336.03 |
| Damping ratio (%) | 0.30 | 0.32 | / | 0.45 | 0.39 | |
| 9th mode | Frequency (Hz) | 476.44 | 476.67 | / | 480.52 | / |
| Damping ratio (%) | 0.43 | 0.46 | / | 0.37 | / |
| Mode Order | HRFDD | PP | EFDD | LSCF |
|---|---|---|---|---|
| 1st |  |  |  |  |
| 2nd |  |  |  |  |
| 3rd |  |  |  |  |
| 4th |  |  |  |  |
| 5th |  | / | / | / |
| 6th |  |  |  |  |
| 7th |  | / | / | / |
| 8th |  | / |  |  |
| 9th |  | / |  | / |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, T.; Wang, Y.; Huang, J.; Cao, M.; Sumarac, D. Automatic High-Resolution Operational Modal Identification of Thin-Walled Structures Supported by High-Frequency Optical Dynamic Measurements. Materials 2024, 17, 4999. https://doi.org/10.3390/ma17204999
Deng T, Wang Y, Huang J, Cao M, Sumarac D. Automatic High-Resolution Operational Modal Identification of Thin-Walled Structures Supported by High-Frequency Optical Dynamic Measurements. Materials. 2024; 17(20):4999. https://doi.org/10.3390/ma17204999
Chicago/Turabian StyleDeng, Tongfa, Yuexin Wang, Jinwen Huang, Maosen Cao, and Dragoslav Sumarac. 2024. "Automatic High-Resolution Operational Modal Identification of Thin-Walled Structures Supported by High-Frequency Optical Dynamic Measurements" Materials 17, no. 20: 4999. https://doi.org/10.3390/ma17204999
APA StyleDeng, T., Wang, Y., Huang, J., Cao, M., & Sumarac, D. (2024). Automatic High-Resolution Operational Modal Identification of Thin-Walled Structures Supported by High-Frequency Optical Dynamic Measurements. Materials, 17(20), 4999. https://doi.org/10.3390/ma17204999