

Knittle Pressure Sensor Based on Graphene/Polyvinylidene Fluoride Nanocomposite Coated on Polyester Fabric


Abstract
:1. Introduction
2. Sensing Mechanism
3. Materials and Sample Preparation
4. Results and Discussion
4.1. Characterization of Graphene/PVDF Nanocomposite
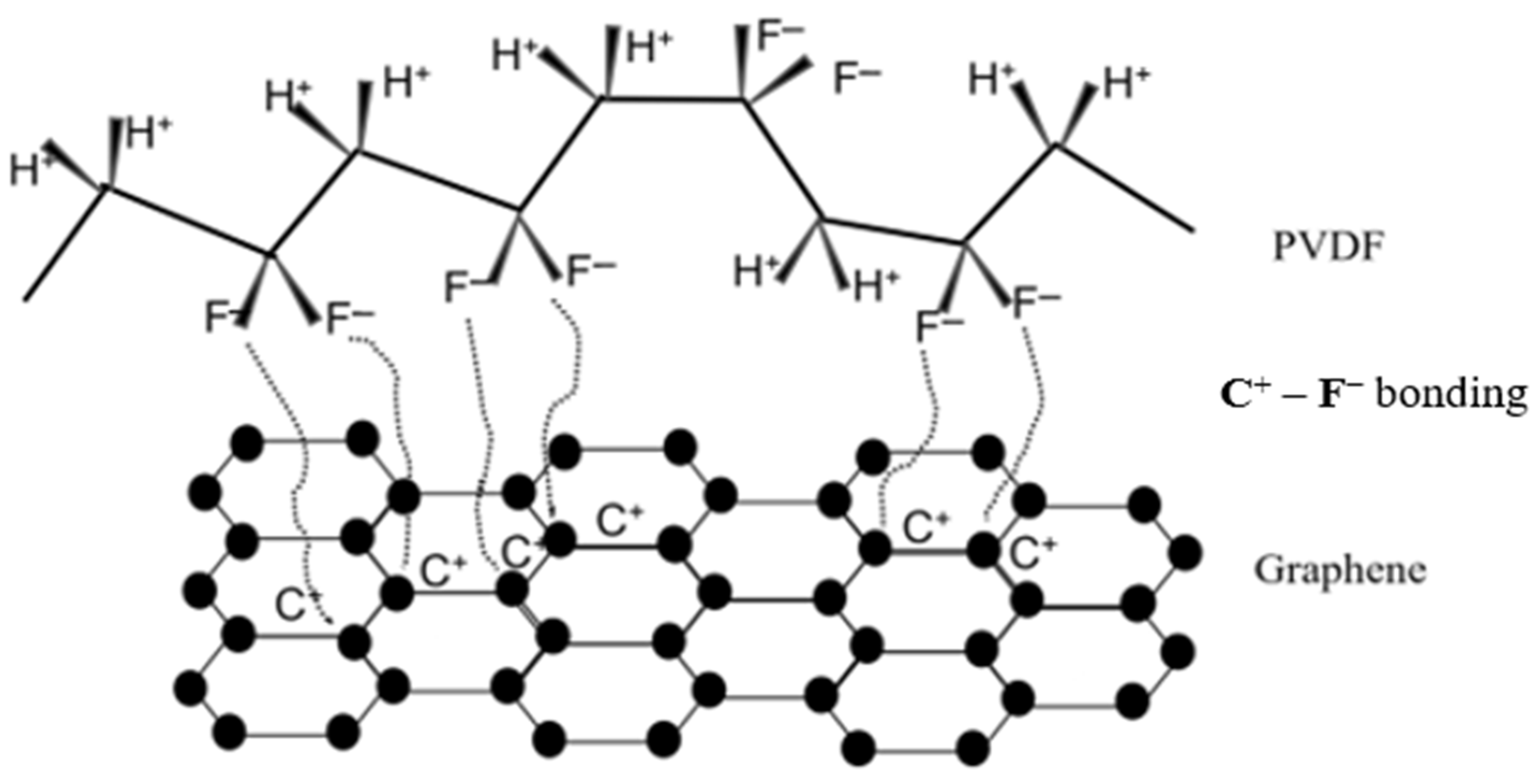
- (a)
- Bonding between PVDF and graphene: The bonding between PVDF and graphene is due to the presence of electron-rich benzene rings in graphene and electron-poor fluorine atoms. This polar ionic bond between carbon and fluorine atoms (C+–F−) is an attractive interaction that holds the nanocomposite together. Thus, PVDF acts as a good binder in the formation of conductive graphene/PVDF nanocomposite [28]. PVDF is a versatile material in nanocomposites, especially for sensors and flexible electronics. Its inherent piezoelectricity enables the conversion of mechanical stress into electrical signals, crucial for sensors. PVDF’s flexibility and chemical stability allow it to be molded into various forms and resist harsh environments, making it ideal for wearable devices. Moreover, its compatibility with diverse nanoparticles enhances its mechanical and electrical properties, while its biocompatibility suits medical applications. PVDF’s thermal stability and cost-effectiveness further enhance its appeal, making it pivotal in the development of advanced nanocomposite technologies, particularly in sensors and flexible electronics. The schematic of bonding between carbon and fluorine atoms is presented in Figure 2.
- (b)
- X-Ray Diffraction (XRD): The XRD pattern of uncoated polyester, coated polyester, and graphene/PVDF nanocomposite is shown in Figure 3. The three main characteristic peaks of uncoated polyester in the diffraction pattern were seen at 2θ angles of 17.9° (110), 22.7° (002), and 26.1° (101). In coated polyester, the characteristic peaks were found at 2θ angles of 18.4°, 22.9°, and 26.7°. The intensities of the peaks were increased, broadened, and shifted which can be attributed, respectively, to the possible increase in the crystal phase, the formation of nanocrystalline phases, and the surface stress of coated nanocomposite on the polyester fabric. These peak positions agree with the peaks reported in other research papers [21,29,30,31]. Muthukumar et al. reported similar XRD patterns for polyester and polyester polyaniline (PANI) fabrics [32].The nanocomposite was separately examined by XRD. PVDF is a semi-crystalline polymer that can exhibit α, β, γ, and δ crystallographic forms. The characteristic peak of the α-phase of PVDF was observed at 2θ angles of 19.2° (002). The characteristic peak at the 2θ angle of 20.48° (110) indicates the presence of β-phase of PVDF, which is desirable for piezoelectric characteristics for the polymer and can be implemented in developing piezoelectric-based sensors. Natural graphite is a highly crystalline material that displays a very sharp peak [29]. However, the peak at a 2θ angle of 27.2° (002) is less intense, indicating the proper exfoliation of graphite into graphene.

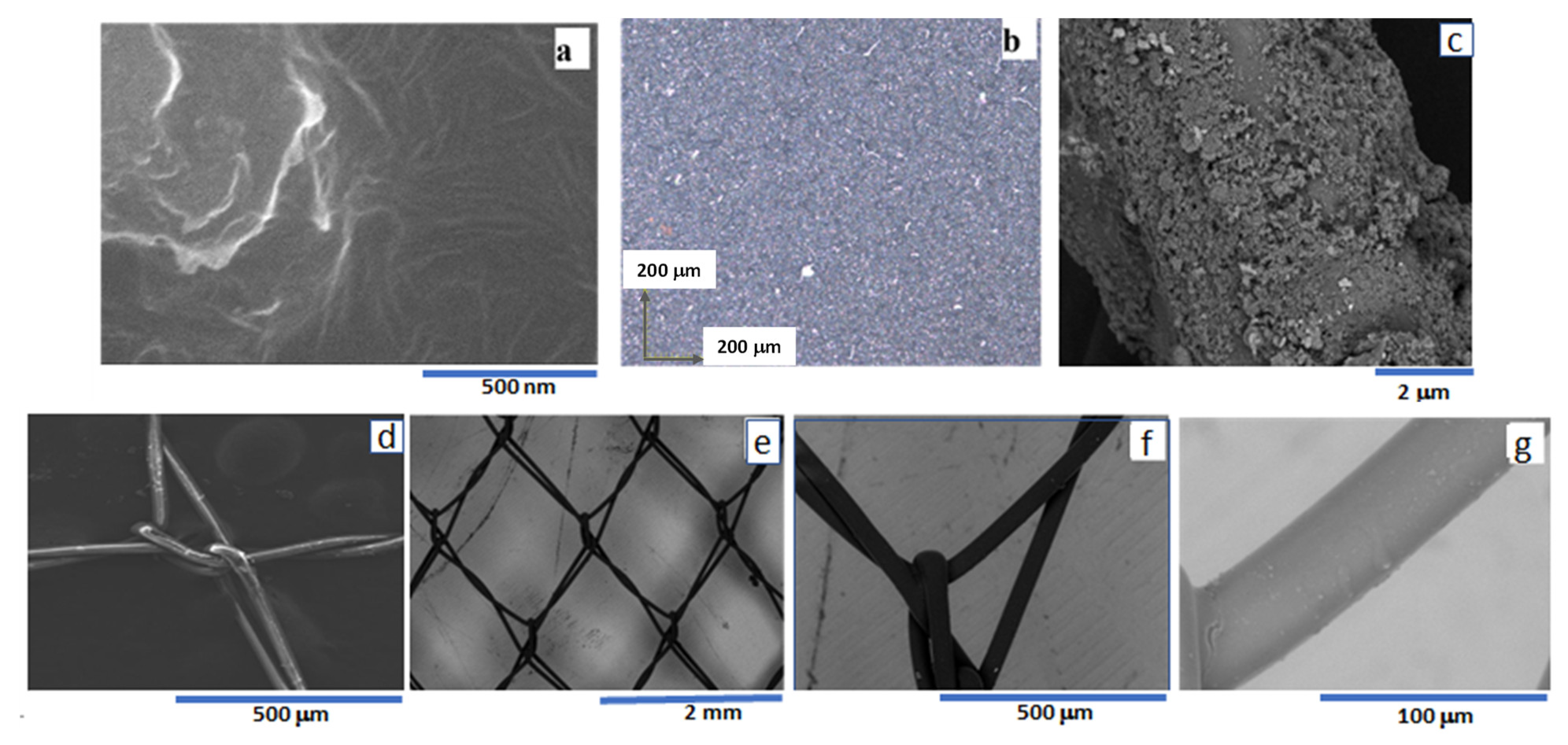
- (c)
- Scanning Electron Microscopy (SEM) and Optical Microscopy (OM): The morphology of nanocomposite and coated polyester fabric were analyzed under SEM and OM as shown in Figure 4. The images of nanocomposite film in Figure 4a,b do not show any aggregation of graphene and PVDF, indicating homogeneous dispersion of PVDF into graphene matrix and formation of graphene layers. The nanocomposite film in the polyester fabric was evenly coated without any damage as shown in Figure 4c–e. This result suggests that graphene/PVDF nanocomposite film can be coated on polyester fabric for the fabrication of textile sensors. Manasoglu et al. [33] had also shown the homogeneous coating of graphite nano-powder on polyester fabric to study electrical resistivity and the thermal conductivity properties.
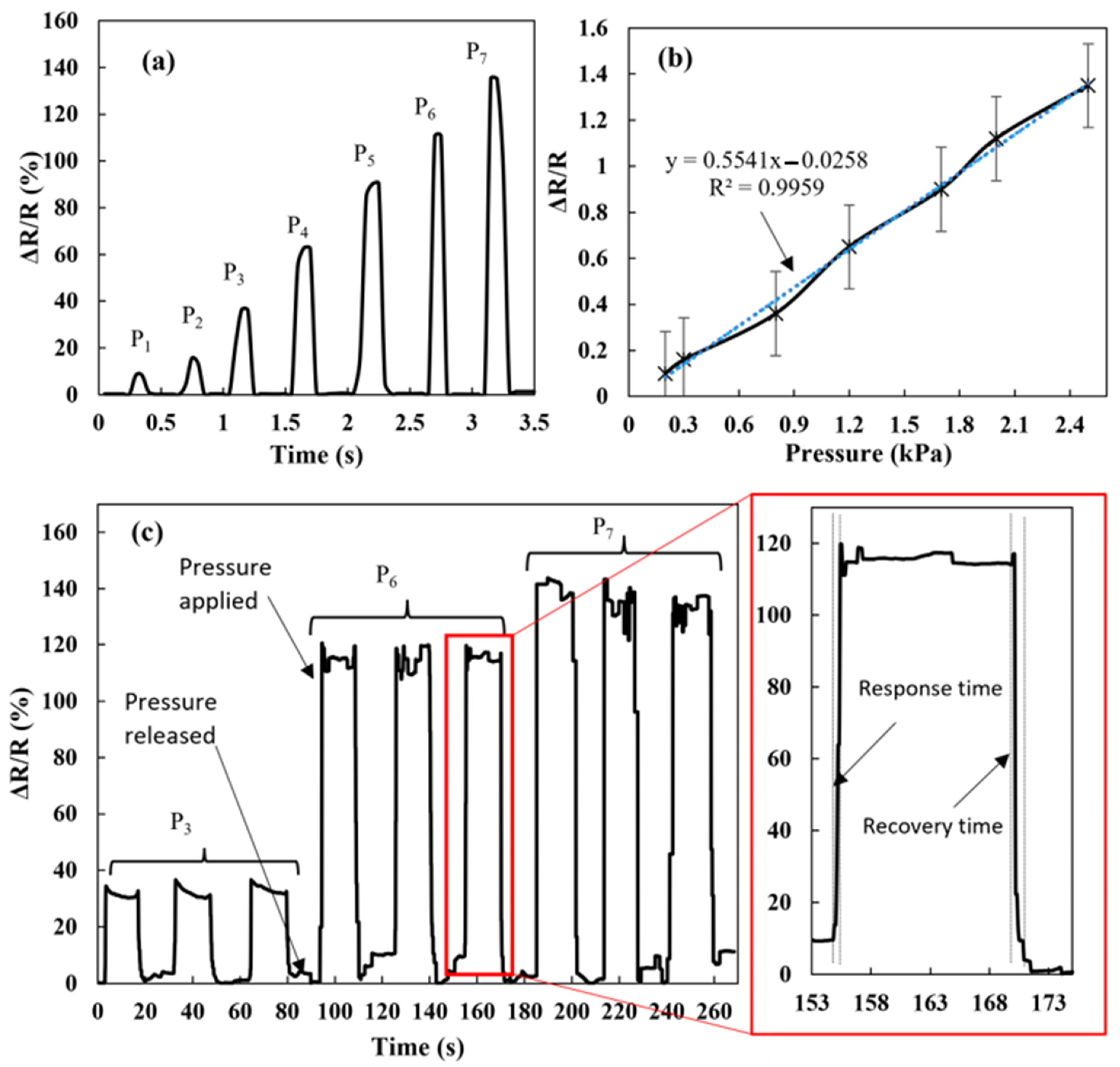
4.2. Measurement of Sensor Response
4.3. Temperature Dependence on Electrical Conductivity
4.4. I-V Characteristic Curve of Graphene/PVDF Nanocomposite
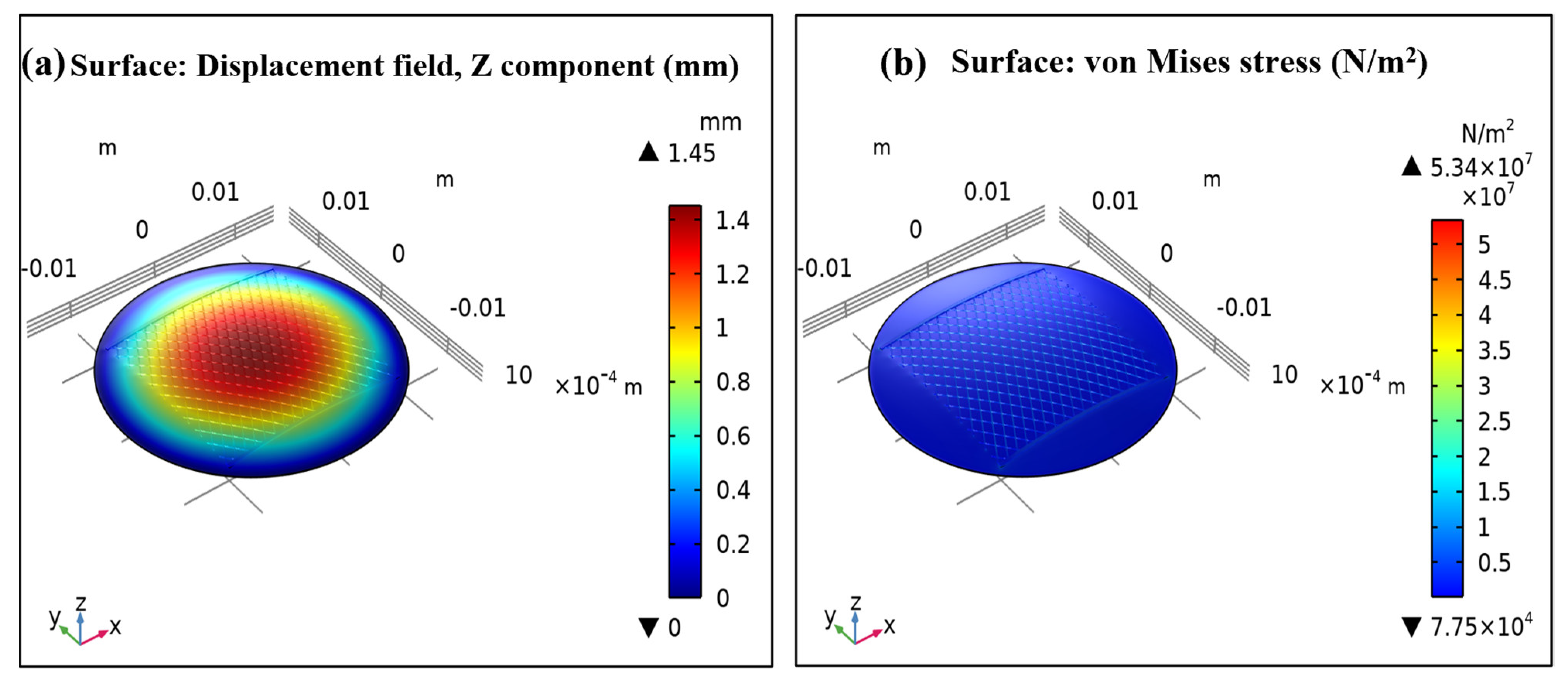
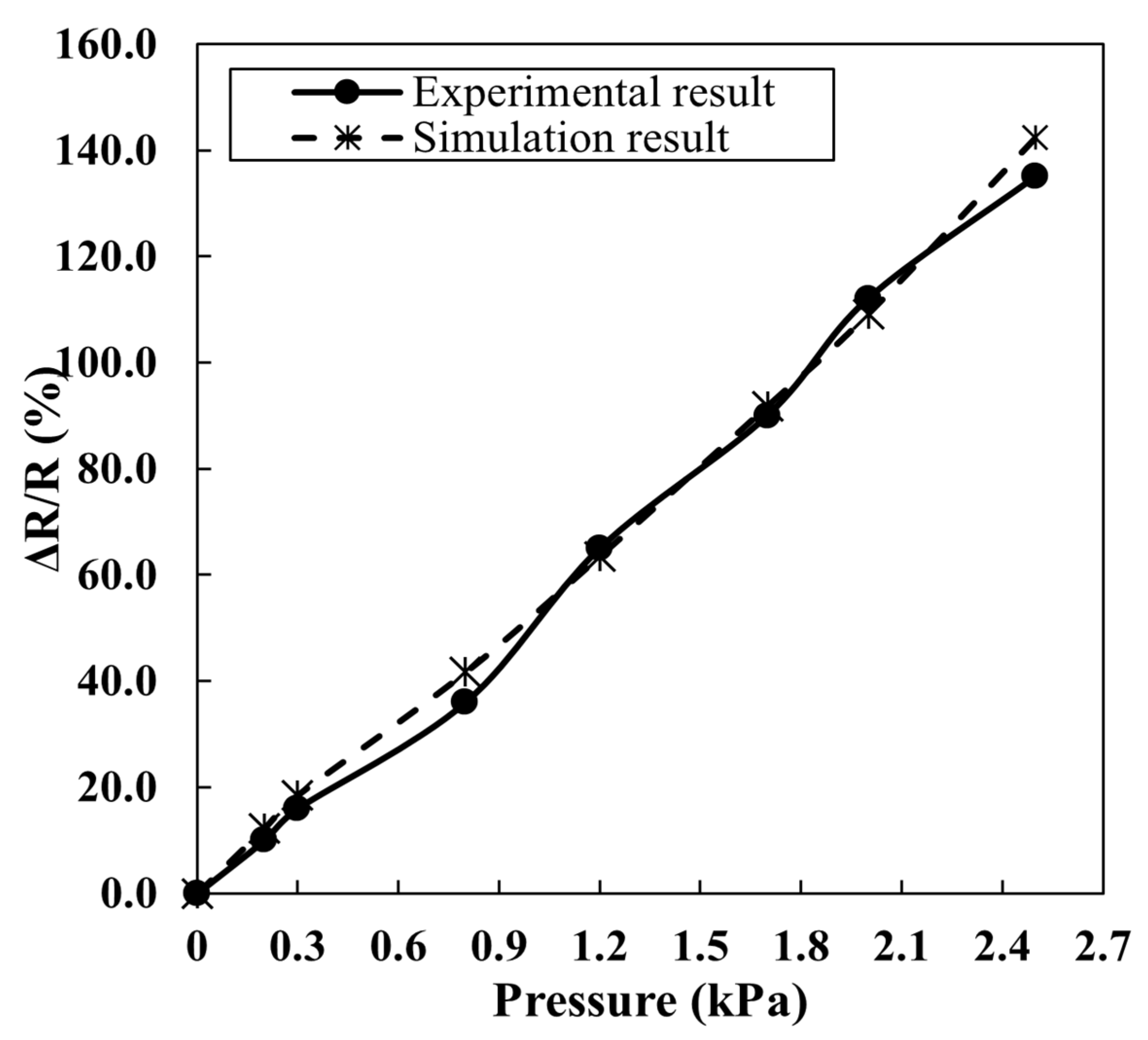
5. Finite Element Analysis (FEA)
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- La, T.-G.; Qiu, S.; Scott, D.K.; Bakhtiari, R.; Kuziek, J.W.P.; Mathewson, K.E.; Rieger, J.; Chung, H.J. Two-Layered and Stretchable e-Textile Patches for Wearable Healthcare Electronics. Adv. Healthc. Mater. 2018, 7, 1801033. [Google Scholar] [CrossRef]
- Castano, L.M.; Flatau, A.B. Smart fabric sensors and e-textile technologies: A review. Smart Mater. Struct. 2014, 23, 053001. [Google Scholar] [CrossRef]
- Baribina, N.; Oks, A.; Baltina, I.; Eizentals, P. Comparative analysis of knitted pressure sensors. In Proceedings of the International Scientific Conference Engineering for Rural Development, Jelgava, Latvia, 23–25 May 2018. [Google Scholar]
- Qiu, H.-J.; Song, W.-Z.; Wang, X.-X.; Zhang, J.; Fan, Z.; Yu, M.; Ramakrishna, S.; Long, Y.-Z. A calibration-free self-powered sensor for vital sign monitoring and finger tap communication based on wearable triboelectric nanogenerator. Nano Energy 2019, 58, 536–542. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, Y.; Zhang, X.; Huo, Z.; Li, X.; Que, M.; Peng, Z.; Wang, H.; Pan, C. A Highly Stretchable Transparent Self-Powered Triboelectric Tactile Sensor with Metallized Nanofibers for Wearable Electronics. Adv. Mater. 2018, 30, 1706738. [Google Scholar] [CrossRef]
- Tung, T.T.; Nine, M.J.; Krebsz, M.; Pasinszki, T.; Coghlan, C.J.; Tran, D.N.H.; Losic, D. Recent Advances in Sensing Applications of Graphene Assemblies and Their Composites. Adv. Funct. Mater. 2017, 27, 1702891. [Google Scholar] [CrossRef]
- Wu, W.; Wen, X.; Wang, Z.L. Taxel-Addressable Matrix of Vertical-Nanowire Piezotronic Transistors for Active and Adaptive Tactile Imaging. Science 2013, 340, 952–957. [Google Scholar] [CrossRef] [PubMed]
- Zeng, W.; Shu, L.; Li, Q.; Chen, S.; Wang, F.; Tao, X.-M. Fiber-Based Wearable Electronics: A Review of Materials, Fabrication, Devices, and Applications. Adv. Mater. 2014, 26, 5310–5336. [Google Scholar] [CrossRef]
- Gong, S.; Schwalb, W.; Wang, Y.; Chen, Y.; Tang, Y.; Si, J.; Shirinzadeh, B.; Cheng, W. A wearable and highly sensitive pressure sensor with ultrathin gold nanowires. Nat. Commun. 2014, 5, 3132. [Google Scholar] [CrossRef]
- Lipomi, D.J.; Vosgueritchian, M.; Tee, B.C.K.; Hellstrom, S.L.; Lee, J.A.; Fox, C.H.; Bao, Z. Skin-like pressure and strain sensors based on transparent elastic films of carbon nanotubes. Nat. Nanotechnol. 2011, 6, 788–792. [Google Scholar] [CrossRef]
- Wang, X.; Gu, Y.; Xiong, Z.; Cui, Z.; Zhang, T. Silk-Molded Flexible, Ultrasensitive, and Highly Stable Electronic Skin for Monitoring Human Physiological Signals. Adv. Mater. 2014, 26, 1336–1342. [Google Scholar] [CrossRef]
- Trung, T.Q.; Lee, N.-E. Flexible and Stretchable Physical Sensor Integrated Platforms for Wearable Human-Activity Monitoringand Personal Healthcare. Adv. Mater. 2016, 28, 4338–4372. [Google Scholar] [CrossRef]
- Núñez, C.G.; Navaraj, W.T.; Polat, E.O.; Dahiya, R. Energy-Autonomous, Flexible, and Transparent Tactile Skin. Adv. Funct. Mater. 2017, 27, 1606287. [Google Scholar] [CrossRef]
- Mei, Z.; Ivanov, K.; Zhao, G.; Li, H.; Wang, L. An explorative investigation of functional differences in plantar center of pressure of four foot types using sample entropy method. Med. Biol. Eng. Comput. 2017, 55, 537–548. [Google Scholar] [CrossRef] [PubMed]
- Mei, Z.; Zhao, G.; Ivanov, K.; Guo, Y.; Zhu, Q.; Zhou, Y.; Wang, L. Sample entropy characteristics of movement for four foot types based on plantar centre of pressure during stance phase. Biomed. Eng. Online 2013, 12, 101. [Google Scholar] [CrossRef] [PubMed]
- Ge, G.; Cai, Y.; Dong, Q.; Zhang, Y.; Shao, J.; Huang, W.; Dong, X. A flexible pressure sensor based on rGO/polyaniline wrapped sponge with tunable sensitivity for human motion detection. Nanoscale 2018, 10, 10033–10040. [Google Scholar] [CrossRef]
- Wang, S.; Chong, N.L.; Virkki, J.; Björninen, T.; Sydänheimo, L.; Ukkonen, L. Towards Washable Electrotextile UHF RFID Tags: Reliability Study of Epoxy-Coated Copper Fabric Antennas. Int. J. Antennas Propag. 2015, 2015, 424150. [Google Scholar] [CrossRef]
- Soukup, R.; Hamacek, A.; Mracek, L.; Reboun, J. Textile based temperature and humidity sensor elements for healthcare applications. In Proceedings of the 2014 37th International Spring Seminar on Electronics Technology, Dresden, Germany, 7–11 May 2014; pp. 407–411. [Google Scholar]
- Rehnby, W.; Gustafsson, M.; Skrifvars, M. Coating of textile fabrics with conductive polymers for smart textile applications. In Proceedings of the Ambience’08, Borås, Sweden, 2–3 June 2008; pp. 100–103. [Google Scholar]
- Maharjan, S.; Samoei, V.K.; Jayatissa, A.H. Graphene/PVDF Nanocomposite-Based Accelerometer for Detection of Low Vibrations. Materials 2023, 16, 1586. [Google Scholar] [CrossRef] [PubMed]
- Maharjan, S.; Samoei, V.K.; Amili, O.; Sano, K.; Honma, H.; Jayatissa, A.H. Design and fabrication of a graphene/polyvinylidene fluoride nanocomposite-based airflow sensor. ACS Omega 2022, 7, 7981–7988. [Google Scholar] [CrossRef]
- Amjadi, M.; Pichitpajongkit, A.; Lee, S.; Ryu, S.; Park, I. Highly Stretchable and Sensitive Strain Sensor Based on Silver Nanowire–Elastomer Nanocomposite. ACS Nano 2014, 8, 5154–5163. [Google Scholar] [CrossRef]
- Boland, C.S. Stumbling through the Research Wilderness, Standard Methods To Shine Light on Electrically Conductive Nanocomposites for Future Healthcare Monitoring. ACS Nano 2019, 13, 13627–13636. [Google Scholar] [CrossRef]
- Wang, W.; Jayatissa, A.H. Comparison study of graphene based conductive nanocomposites using poly(methyl methacrylate) and polypyrrole as matrix materials. J. Mater. Sci. Mater. Electron. 2015, 26, 7780–7783. [Google Scholar] [CrossRef]
- Itapu, B.; Jayatissa, A. A Review in Graphene/Polymer Composites. Chem. Sci. Int. J. 2018, 23, 1–16. [Google Scholar] [CrossRef]
- Wang, W.; Jayatissa, A.H. Computational and experimental study of electrical conductivity of graphene/poly(methyl methacrylate) nanocomposite using Monte Carlo method and percolation theory. Synth. Met. 2015, 204, 141–147. [Google Scholar] [CrossRef]
- Methods Described in Dip Coating: Practical Guide to Theory and Troubleshooting. Available online: https://www.ossila.com/en-us/pages/dip-coating (accessed on 19 September 2023).
- Rafeie, O.; Aghjeh, M.K.R.; Tavakoli, A.; Salami-Kalajahi, M.; Jameie-Oskooie, A.; Ghayoumi, M. Study on crystalline structure of poly(vinylidene fluoride)/polyethylene/graphene blend-nanocomposites. Polym. Compos. 2019, 40, 4402–4415. [Google Scholar] [CrossRef]
- El Salam, M.H.A.; Elkomy, G.M.; Osman, H.; Nagy, M.R.; El-Sayed, F. Structure-electrical conductivity of polyvinylidene fluoride/graphite composites. J. Reinf. Plast. Compos. 2012, 31, 1342–1352. [Google Scholar] [CrossRef]
- Yao, H.-B.; Ge, J.; Wang, C.; Wang, X.; Hu, W.; Zheng, Z.; Ni, Y.; Yu, S. A Flexible and Highly Pressure-Sensitive Graphene-Polyurethane Sponge Based on Fractured Microstructure Design. Adv. Mater. 2013, 25, 6692–6698. [Google Scholar] [CrossRef]
- Hafeezullah, M.; Kumari, N. Study of multifunctional nanocoated cold plasma treated polyester cotton blended curtains. Surf. Rev. Lett. 2016, 23, 1650036. [Google Scholar]
- Muthukumar, N.; Thilagavathi, G. Development and Characterization of Electrically Conductive Polyaniline Coated Fabrics; NISCAIR-CSIR: Delhi, India, 2012. [Google Scholar]
- Manasoglu, G.; Celen, R.; Kanik, M.; Ulcay, Y. Electrical resistivity and thermal conductivity properties of graphene-coated woven fabrics. J. Appl. Polym. Sci. 2019, 136, 48024. [Google Scholar] [CrossRef]
- Zhao, R.; Jayasingha, R.; Sherehiy, A.; Dharmasena, R.; Akhtar, M.; Jasinski, J.B.; Wu, S.Y.; Henner, V.; Sumanasekera, U.U. In Situ Transport Measurements and Band Gap Formation of Fluorinated Graphene. J. Phys. Chem. C 2015, 119, 20150–20155. [Google Scholar] [CrossRef]
- Samoei, V.K.; Maharjan, S.; Sano, K.; Jayatissa, A.H. Effect of Annealing on Graphene/PVDF Nanocomposites. ACS Omega 2023, 8, 13876–13883. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Graphene | PVDF | Latex Rubber | Polyester Fabric |
|---|---|---|---|---|
| Density (kg/m3) | 2250 | 1780 | 970 | 1380 |
| Melting Point (°C) | 3650 | 155–160 | 180 | 295 |
| Resistivity (Ω⋅cm) | 10−6 | 2 × 1014 | – | – |
| Electrical Conductivity (S/cm) | 6000 | – | – | – |
| Young’s Modulus (GPa) | 1000 | 2.45 | 0.1 | 0.92 |
| Yield strength/Tensile strength (MPa) | 240–280 | 25–60 | 10–20 | 53.8–265 |
| Poisson’s Ratio | 0.149 | 0.34 | 0.49 | 0.43 |
| Dimensions used in sensor (µm) | *t:20 µm *A:20 mm × 20 mm (Thin film Coating) | *t:52 µm *r:15 mm | *t:140 µm *A:20 mm × 20 mm | |
| Property | Value |
|---|---|
| Career density (n), cm−3 | 2.63 × 1016 |
| Hall voltage (VH), V | 0.022 |
| Mobility (µ), cm2/(v⋅s) | 156.33 |
| Conduction type | P-type |
| Name | Expression | Value | Description |
|---|---|---|---|
| Pz | 2500 [N/m2] | 2500 N/m2 | Force per unit volume |
| rho_f | 1780 [kg/m3] | 1780 kg/m3 | PVDF density |
| rho_m | 2250 [kg/m3] | 2250 kg/m3 | Graphene density |
| rho_c | rho_f*V_f + rho_m*V_m | 2240.8 kg/m3 | Composite density |
| V_f | 0.0196 | 0.0196 | Fiber volume fraction |
| V_m | 1 − V_f | 0.9804 | Resin volume of fraction |
| E_m | 1 [TPa] | 1 × 1012 Pa | Graphene Young’s modulus |
| nu_c | 0.19 | 0.19 | Composite Poisson’s ration |
| nn | 2.5578 × 1012 [1/mm3] | 2.5578 × 1021/m3 | The number density of graphene |
| sigma0 | 3 × 103 [S/cm] | 3 × 105 S/m | Electrical conductivity of Graphene |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maharjan, S.; Samoei, V.K.; Jayatissa, A.H.; Noh, J.-H.; Sano, K. Knittle Pressure Sensor Based on Graphene/Polyvinylidene Fluoride Nanocomposite Coated on Polyester Fabric. Materials 2023, 16, 7087. https://doi.org/10.3390/ma16227087
Maharjan S, Samoei VK, Jayatissa AH, Noh J-H, Sano K. Knittle Pressure Sensor Based on Graphene/Polyvinylidene Fluoride Nanocomposite Coated on Polyester Fabric. Materials. 2023; 16(22):7087. https://doi.org/10.3390/ma16227087
Chicago/Turabian StyleMaharjan, Surendra, Victor K. Samoei, Ahalapitiya H. Jayatissa, Joo-Hyong Noh, and Keiichiro Sano. 2023. "Knittle Pressure Sensor Based on Graphene/Polyvinylidene Fluoride Nanocomposite Coated on Polyester Fabric" Materials 16, no. 22: 7087. https://doi.org/10.3390/ma16227087
APA StyleMaharjan, S., Samoei, V. K., Jayatissa, A. H., Noh, J.-H., & Sano, K. (2023). Knittle Pressure Sensor Based on Graphene/Polyvinylidene Fluoride Nanocomposite Coated on Polyester Fabric. Materials, 16(22), 7087. https://doi.org/10.3390/ma16227087