
Development and Vibration Control of Frequency Adjustable Tuned Mass Damper Based on Magnetorheological Elastomer



Abstract
1. Introduction
2. Mechanism and Design of Frequency Adjustable Tuned Mass Damper (FATMD)
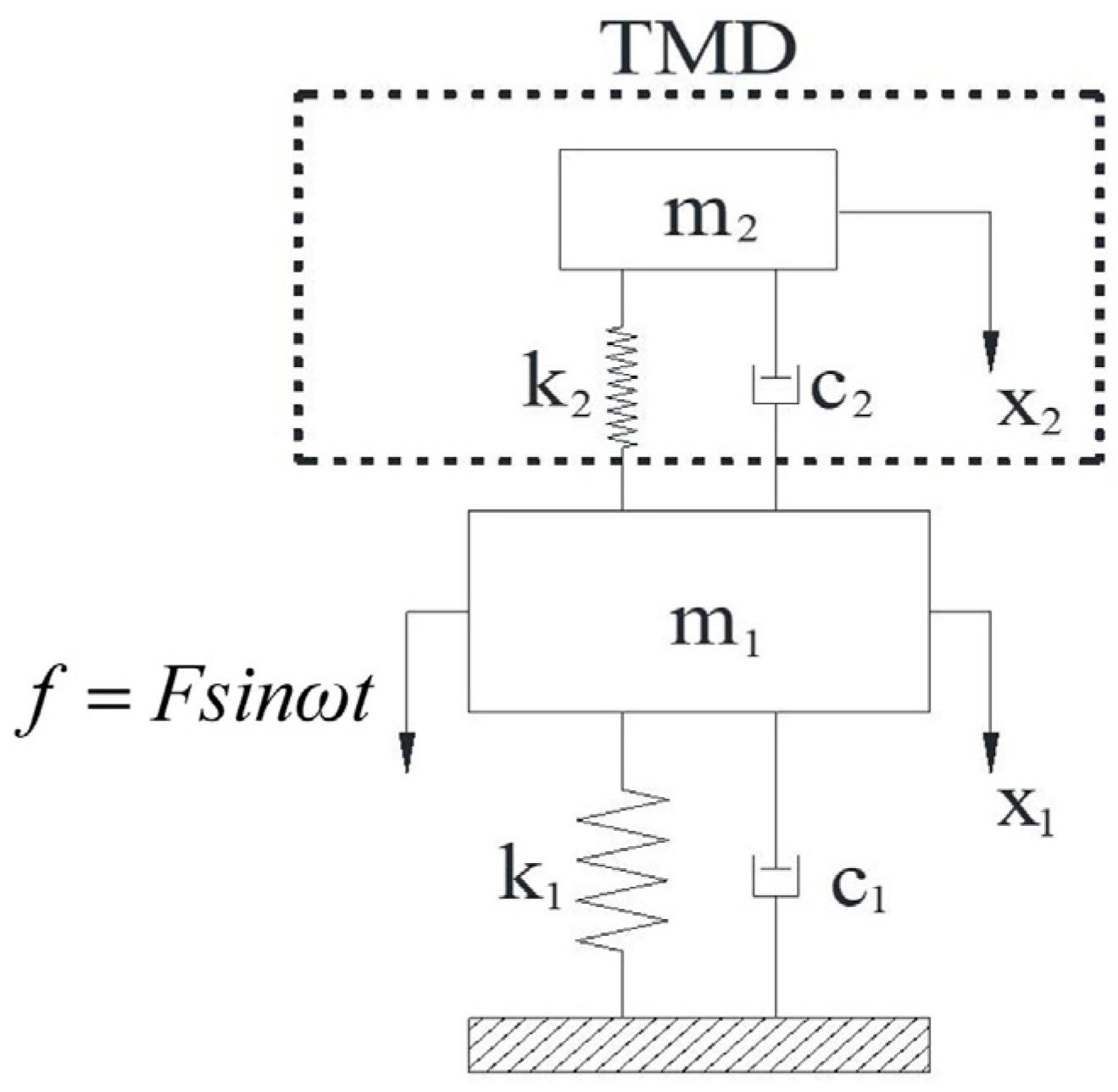
2.1. The Mechanism of Traditional Tuned Mass Damper (TMD)
2.2. The Mechanism and Structure of FATMD
2.3. Magnetic Circuit Analysis of FATMD
3. Real-Time Identification of System Natural Frequency
3.1. Hilbert–Huang Transformation
3.2. Natural Excitation Technique
3.3. The Procedures of the System Natural Frequency Identification Method
- Firstly, obtain the natural frequency of the system response signal under impulse excitation by FFT;
- According to the natural frequency of the mode to be controlled, set a band-pass filter that allows the natural frequency signal to pass through to reduce the influence of noise on the response signal and reduce the modal aliasing phenomenon in HHT;
- Set the measurement point and reference point, delay the response signal to obtain the filtered measurement point signal array and the reference point signal array and use EMD for the two sets of signals to obtain the corresponding ith IMF signals;
- To eliminate the end effect of the signal array of measurement point and reference point, we use NExT to process them, and obtain the impulse response signal corresponding to the ith mode, and perform HT to obtain the mean value of the instantaneous frequency corresponding to the ith mode;
- The natural frequency of the system will be updated based on the average value of the output instantaneous frequency at a certain pre-set time interval.
4. FATMD Real-Time Tracking Method of the Natural Frequency of the Main Structure
- Firstly, the derivative of the acceleration amplitude ratio formula, with respect to the square of the external excitation frequency ratio, is calculated to obtain the modal mass expression of the main structure when the derivative is 0;
- Then, the first two natural frequencies of the identified system are substituted into the above expression to obtain two modal mass expressions of the main structure with different coefficients;
- Finally, under the condition that the stiffness, mass and natural frequency of FATMD are known, the above two expressions are combined to obtain the modal stiffness of the main structure, and then the modal mass of the main structure and the optimal design parameters of FATMD are obtained.
5. Vibration Control Experiment of FATMD
- First, taking the four mass blocks in the middle of the steel beam as the basic case, conduct the steel beam vibration experiment in an uncontrolled state, and record the mid-span acceleration response of the steel beam under harmonic and white noise excitation;
- Place the traditional TMD in the middle of the steel beam and record the mid-span acceleration response;
- TMD is replaced by FATMD. Apply voltage to FATMD through the calculation frequency of the main structure, using Equation (27). Then, record the mid-span acceleration response under the two excitation methods;
- Reduce the number of mass blocks to achieve the purpose of changing the natural frequency of the steel beam, repeat the above steps until the number of mass blocks is zero.
6. Conclusions
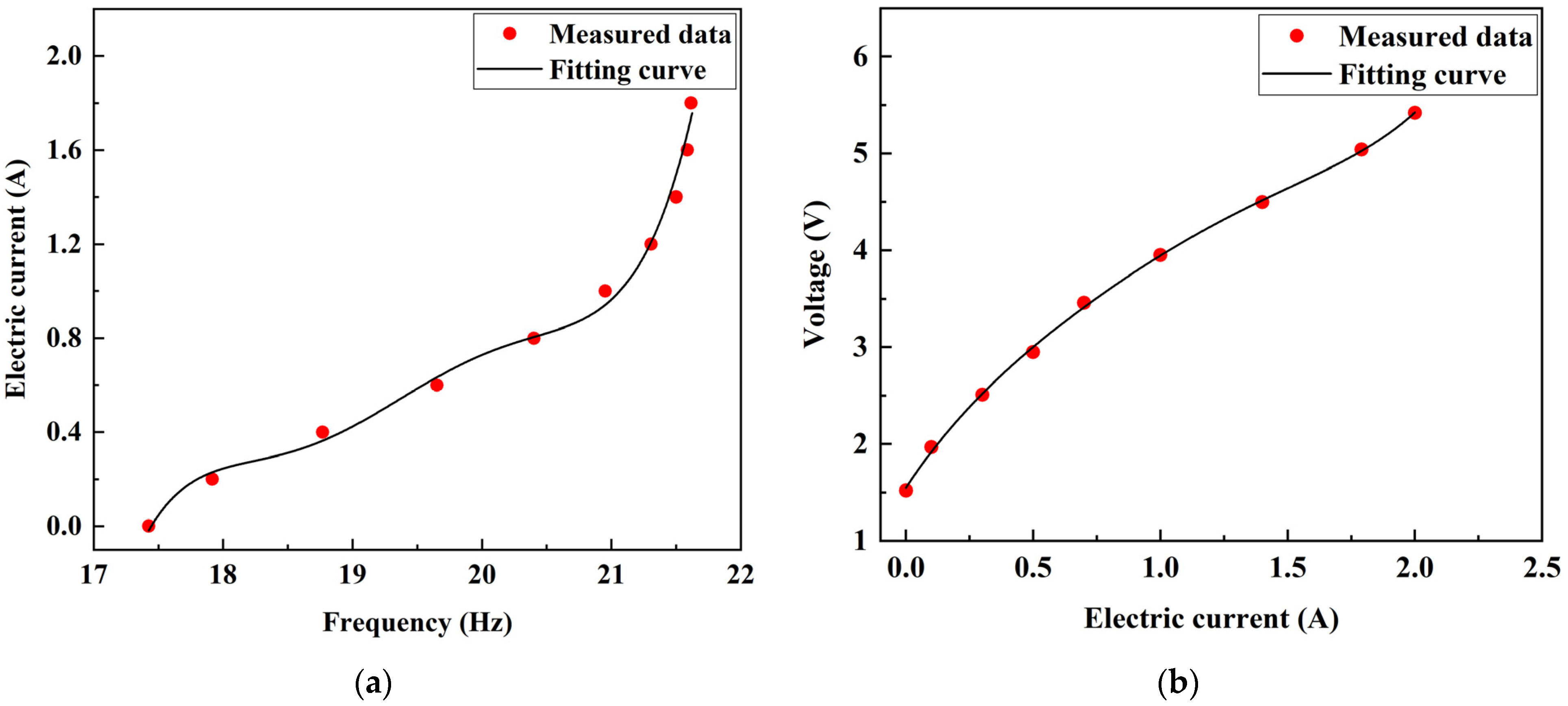
- FATMD can change the natural vibration frequency by changing the input current, so as to adapt to the frequency change of the main structure, and continuously achieve an optimal vibration reduction effect. Based on the FATMD magnetic circuit analysis and MRE magnetic induction tests, the relationship between the MRE shear modulus and input current is obtained, and then a method for adjusting the natural frequency of FATMD is proposed.
- A real-time frequency tracking method, based on HHT+NExT, is established. The simulation and experimental results of frequency tracking show that the method has high accuracy for frequency identification of the main structure, which confirms the applicability of the proposed method. The identified natural frequency of the vibration reduction system can be converted into the natural frequency of the main structure through the TMD optimal design theory, and the optimal frequency of FATMD can be calculated using the natural frequency of the main structure. Based on the relationship between the optimal frequency and the voltage of FATMD, the frequency tracking of FATMD can be achieved.
- It was found that, compared with traditional TMD, FATMD has better and stable vibration reduction effect when the natural frequency of the main structure changes. When the difference between the natural frequency of the structure and the natural frequency of the TMD gradually increases, the traditional TMD appears to be detuning, and the vibration reduction effect is reduced. However, FATMD can track the natural frequency of the structure in real time to continue to maintain good vibration reduction performance.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chang, C.; Shia, S.; Lai, Y. Seismic design of passive tuned mass damper parameters using active control algorithm. J. Sound Vib. 2018, 426, 150–165. [Google Scholar] [CrossRef]
- Elias, S.; Matsagar, V. Research developments in vibration control of structures using passive tuned mass dampers. Annu. Rev. Control 2017, 44, 129–156. [Google Scholar] [CrossRef]
- Meinhardt, C.; Newland, D.; Talbot, J.; Taylor, D. Vibration performance of London’s Millennium Footbridge. In Proceedings of the 24th International Congress on Sound and Vibration (ICSV24), London, UK, 23–27 July 2017. [Google Scholar]
- Wang, D.; Wu, C.; Zhang, Y.; Li, S. Study on vertical vibration control of long-span steel footbridge with tuned mass dampers under pedestrian excitation. J. Constr. Steel Res. 2019, 154, 84–98. [Google Scholar] [CrossRef]
- Ferreira, F.; Simões, L. Optimum Design of a Controlled Cable-Stayed Footbridge Subject to a Running Event Using Semiactive and Passive Mass Dampers. J. Perform. Constr. Facil. 2019, 33, 04019025. [Google Scholar] [CrossRef]
- Bathaei, A.; Zahrai, S.M.; Ramezani, M. Semi-active seismic control of an 11-DOF building model with TMD+MR damper using type-1 and -2 fuzzy algorithms. J. Vib. Control 2018, 24, 2938–2953. [Google Scholar] [CrossRef]
- Chen, Z.; Fang, H.; Han, Z.; Sun, S. Influence of bridge-based designed TMD on running trains. J. Vib. Control 2019, 25, 182–193. [Google Scholar] [CrossRef]
- Yang, F.; Sedaghati, R.; Esmailzadeh, E. Vibration suppression of structures using tuned mass damper technology: A state-of-the-art review. J. Vib. Control 2021, 1–25. [Google Scholar] [CrossRef]
- Rana, R.; Soong, T.T. Parametric study and simplified design of tuned mass dampers. Eng. Struct. 1998, 20, 193–204. [Google Scholar] [CrossRef]
- Wang, J.F.; Lin, C.C.; Chen, B.L. Vibration suppression for high-speed railway bridges using tuned mass dampers. Int. J. Solids Struct. 2003, 40, 465–491. [Google Scholar] [CrossRef]
- Okhovat, M.R.; Rahimian, M.; Ghorbani-Tanha, A.K. Tuned mass damper for seismic response reduction of Tehran Tower. In Proceedings of the 4th International Conference on Earthquake Engineering, Taipei, Taiwan, China, 12–13 October 2006. [Google Scholar]
- Wen, Y.; Sun, L. Research on wind response control of large cable-stayed bridge under construction by using hybrid system of TMDs and ATMDs. Eng. Mech. 2011, 28, 171–179. [Google Scholar]
- Jaiswal, O.R. Simple tuned mass damper to control seismic response of elevated tanks. In Proceedings of the 13th World Conference on Earthquake Engineering, Vancouver, BC, Canada, 1–6 August 2004. [Google Scholar]
- Suzuki, S.; Fujino, E.; Noguchi, H. Experimental study on effect of human-load on vertical dynamic characteristics of wooden floor (part 1). J. Struct. Constr. Eng. 2004, 69, 123–129. [Google Scholar] [CrossRef][Green Version]
- Oyguc, R.; Toros, C.; Abdelnaby, A.E. Seismic behavior of irregular reinforced-concrete structures under multiple earthquake excitations. Soil. Dyn. Earthq. Eng. 2018, 104, 15–32. [Google Scholar] [CrossRef]
- Mantawy, A.; Anderson, J.C. Effect of long-duration earthquakes on the low-cycle fatigue damage in RC frame buildings. Soil Dyn. Earthq. Eng. 2018, 109, 46–57. [Google Scholar] [CrossRef]
- Koto, Y.; Konishi, T.; Sekiya, H.; Miki, C. Monitoring local damage due to fatigue in plate girder bridge. J. Sound Vib. 2019, 438, 238–250. [Google Scholar] [CrossRef]
- Minaei, A.; Ghorbani-Tanha, A.K. Optimal step-by-step tuning method for variable stiffness semiactive tuned mass dampers. J. Eng. Mech. 2019, 145, 04019037. [Google Scholar] [CrossRef]
- Wang, Z.; Gao, H.; Wang, H.; Chen, Z. Development of stiffness-adjustable tuned mass dampers for frequency retuning. Adv. Struct. Eng. 2019, 22, 473–485. [Google Scholar] [CrossRef]
- Karami, K.; Manie, S.; Ghafouri, K.; Nagarajaiah, S. Nonlinear structural control using integrated DDA/ISMP and semi-active tuned mass damper. Eng. Struct. 2019, 181, 589–604. [Google Scholar] [CrossRef]
- Berardengo, M.; Cigada, A.; Guanziroli, F.; Manzoni, S. An adaptive tuned mass damper based on shape memory alloys with an extended range of frequency. In Proceedings of the 2014 IEEE Workshop on Environmental, Energy, and Structural Monitoring Systems Proceedings, Naples, Italy, 17–18 September 2014. [Google Scholar]
- Lin, G.L.; Lin, C.C.; Chen, B.C.; Soong, T.T. Vibration control performance of tuned mass dampers with resettable variable stiffness. Eng. Struct. 2015, 83, 187–197. [Google Scholar] [CrossRef]
- Huo, L.; Huang, C.; Zhang, Y.; Li, H. A passive adaptive suspended mass pendulum to compensate detuning due to large swing angle. Int. J. Struct. Stab. Dy. 2021, 21, 2150123. [Google Scholar] [CrossRef]
- Tuan, A.; Shang, G.Q. Vibration control in a 101-storey building using a tuned mass damper. J. Appl. Sci. Eng. 2014, 17, 141–156. [Google Scholar]
- Lu, X.; Zhang, Q.; Weng, D.; Zhou, Z.; Wang, S.; Mahin, S.A.; Ding, S.; Qian, F. Improving performance of a super tall building using a new eddy-current tuned mass damper. Struct. Control Health Monit. 2017, 24, e1882. [Google Scholar] [CrossRef]
- Sun, C.; Nagarajaiah, S. Study on semi-active tuned mass damper with variable damping and stiffness under seismic excitations. Struct. Control Health Monit. 2014, 21, 890–906. [Google Scholar] [CrossRef]
- Nagarajaiah, S. Adaptive Passive, Semiactive, Smart Tuned Mass Dampers: Identification and Control Using Empirical Mode Decomposition, Hilbert Transform, and Short-Term Fourier Transform. Struct. Control Health Monit. 2010, 16, 800–841. [Google Scholar] [CrossRef]
- Shi, W.; Wang, L.; Lu, Z. Study on self-adjustable tuned mass damper with variable mass. Struct. Control Health Monit. 2018, 25, e2114. [Google Scholar] [CrossRef]
- Shi, W.; Wang, L.; Lu, Z.; Wang, H. Experimental and numerical study on adaptive-passive variable mass tuned mass damper. J. Sound Vib. 2019, 452, 97–111. [Google Scholar] [CrossRef]
- Samal, S. Effect of shape and size of filler particle on the aggregation and sedimentation behavior of the polymer composite. Powder Technol. 2020, 366, 43–51. [Google Scholar] [CrossRef]
- Samal, S.; Blanco, I. Investigation of Dispersion, Interfacial Adhesion of Isotropic and Anisotropic Filler in Polymer Composite. Appl. Sci. 2021, 11, 8561. [Google Scholar] [CrossRef]
- Samal, S.; Škodová, M.; Abate, L.; Blanco, I. Magneto-Rheological Elastomer Composites. A Review. Appl. Sci. 2020, 10, 4899. [Google Scholar] [CrossRef]
- Jaafar, M.F.; Mustapha, F.; Mustapha, M. Review of current research progress related to magnetorheological elastomer material. J. Mater. Res. Technol. 2021, 15, 5010–5045. [Google Scholar] [CrossRef]
- Jeong, U.C.; Yoon, J.H.; Yang, I.H.; Järvinen, E.; Kärnä, T. Magnetorheological elastomer with stiffness-variable characteristics based on induced current applied to differential mount of vehicles. Smart Mater. Struct. 2013, 22, 115007. [Google Scholar] [CrossRef]
- Christie, M.D.; Sun, S.S.; Ning, D.H.; Du, H.; Zhang, S.W.; Li, W.H. A torsional MRE joint for a C-shaped robotic leg. Smart Mater. Struct. 2017, 26, 015002. [Google Scholar] [CrossRef]
- Ginder, J.M.; Schlotter, W.F.; Nichols, M.E. Magnetorheological elastomers in tunable vibration absorbers. In Proceedings of the SPIE’s 8th Annual International Symposium on Smart Structures and Materials, Newport Beach, CA, USA, 2 July 2001. [Google Scholar]
- Komatsuzaki, T.; Iwata, Y. Design of a real-time adaptively tuned dynamic vibration absorber with a variable stiffness property using magnetorheological elastomer. Shock Vib. 2015, 568, 676508. [Google Scholar] [CrossRef]
- Komatsuzaki, T.; Inoue, T.; Terashima, O. Broadband vibration control of a structure by using a magnetorheological elastomer-based tuned dynamic absorber. Mechatronics 2016, 40, 128–136. [Google Scholar] [CrossRef]
- Park, J.E.; Lee, J.; Kim, Y.K. Design of model-free reinforcement learning control for tunable vibration absorber system based on magnetorheological elastomer. Smart Mater. Struct. 2021, 30, 055016. [Google Scholar] [CrossRef]
- Guan, X.; Zhang, J.; Li, H.; Ou, J. Semi-Active Control for Benchmark Building Using Innovative TMD with MRE Isolators. Int. J. Struct. Stab. Dy. 2020, 20, 2040009. [Google Scholar] [CrossRef]
- Wang, Q.; Dong, X.; Liu, L.; Yang, Q.; Ou, J. Wind-induced vibration control of a constructing bridge tower with MRE variable stiffness tuned mass damper. Smart Mater. Struct. 2020, 29, 045034. [Google Scholar] [CrossRef]
- Yang, Q.; Yang, Y.; Wang, Q.; Peng, L. Study on the fluctuating wind responses of constructing bridge towers with magnetorheological elastomer variable stiffness tuned mass damper. J. Intel. Mat. Syst. Str. 2021, 33, 290–308. [Google Scholar] [CrossRef]
- Wang, B.; Tu, J.; Xu, J. The frequency adjustable tuned mass damper device based on magnetorheological elastomers. Vibroeng. Procedia 2015, 5, 356–361. [Google Scholar]
- Yang, J.N.; Lei, Y.; Pan, S.; Huang, N. System identification of linear structures based on Hilbert-Huang spectral analysis Part 1: Normal modes. Earthq. Eng. Struct. Dyn. 2003, 32, 1443–1467. [Google Scholar] [CrossRef]
- Yang, J.N.; Lei, Y.; Pan, S.; Huang, N. System identification of linear structures based on Hilbert-Huang spectral analysis Part 2: Complex modes. Earthq. Eng. Struct. Dyn. 2003, 32, 1533–1554. [Google Scholar] [CrossRef]
- Liu, T.Y.; Chiang, W.L.; Chen, C.W.; Hsu, W.K.; Lin, C.W.; Chiou, D.J.; Huang, P.C. Structural system identification for vibration bridges using the Hilbert–Huang transform. J. Vib. Control 2012, 18, 1939–1956. [Google Scholar] [CrossRef]
- Han, J.; Zheng, P.; Wang, H. Structural modal parameter identification and damage diagnosis based on Hilbert-Huang transform. Earthq. Eng. Eng. Vib. 2014, 13, 101–111. [Google Scholar] [CrossRef]
- Moncayo, H.; Marulanda, J.; Thomson, P. Identification and monitoring of modal parameters in aircraft structures using the Natural Excitation Technique (NExT) combined with the Eigensystem Realization Algorithm (ERA). J. Aerospace Eng. 2010, 23, 99–104. [Google Scholar] [CrossRef]
- Seto, K. Vibration Control of Structure; Corona Publishing: Tokyo, Japan, 2006. [Google Scholar]
- Li, J.F.; Gong, X.L.; Zhang, X.Z.; Zhang, P.Q. Research on magnetorheological elastomer based on silicone rubber. J. Funct. Mater. 2006, 37, 1003–1005. [Google Scholar]
- Xu, Y.; Gong, X.; Xuan, S.; Zhang, W.; Fan, Y. A high-performance magnetorheological material: Preparation, characterization and magnetic-mechanic coupling properties. Soft Matter 2011, 7, 5246–5254. [Google Scholar] [CrossRef]
- Lynn, P.A. The Discrete and Fast Fourier Transforms; Macmillan Education: London, UK, 1992. [Google Scholar]
- Liu, K.; Liang, L.; Jie, L. Comparison of Two Auto-Tuning Methods for a Variable Stiffness Vibration Absorber. Trans. Can. Soc. Mech. Eng. 2005, 29, 81–96. [Google Scholar] [CrossRef]
- James, G.; Carne, T.G.; Laufer, J. The Natural Excitation Technique (NExT) for Modal Parameter Extraction from Operating Structures. Int. J. Anal. Exp. Modal Anal. 1993, 93, 260–277. [Google Scholar]
- Huang, N.E.; Shen, S.P. Hilbert–Huang Transform and Its Applications; World Scientific: London, UK, 2005. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Size (m3) | Elastic Modulus (GPa) | Poisson’s Ratio | Damping Ratio | Density (kg/m3) |
|---|---|---|---|---|
| 2.5 × 0.24 × 0.025 | 211 | 0.3 | 0.01 | 7800 |
| Mass (kg) | Damping Ratio | Current (A) | Stiffness without Current (N/m) | Max Stiffness (N/m) | MRE Size (mm3) |
|---|---|---|---|---|---|
| 2.25 | 0.09 | 0~2 | 26,956 | 41,519 | 33 × 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Zhu, Y.; Tu, J.; Li, Z.; Wang, Q. Development and Vibration Control of Frequency Adjustable Tuned Mass Damper Based on Magnetorheological Elastomer. Materials 2022, 15, 1829. https://doi.org/10.3390/ma15051829
Zhang J, Zhu Y, Tu J, Li Z, Wang Q. Development and Vibration Control of Frequency Adjustable Tuned Mass Damper Based on Magnetorheological Elastomer. Materials. 2022; 15(5):1829. https://doi.org/10.3390/ma15051829
Chicago/Turabian StyleZhang, Jiarui, Yaoyang Zhu, Jianwei Tu, Zhao Li, and Qiankun Wang. 2022. "Development and Vibration Control of Frequency Adjustable Tuned Mass Damper Based on Magnetorheological Elastomer" Materials 15, no. 5: 1829. https://doi.org/10.3390/ma15051829
APA StyleZhang, J., Zhu, Y., Tu, J., Li, Z., & Wang, Q. (2022). Development and Vibration Control of Frequency Adjustable Tuned Mass Damper Based on Magnetorheological Elastomer. Materials, 15(5), 1829. https://doi.org/10.3390/ma15051829