3.1. Characteristics of Stones
The mean mass of the stones in the subsequent columns increased by about 30% and the mean values formed individual homogeneous groups of masses from 2.52 to 4.72 kg (
Table 5). The sets of five stones in the individual columns were carefully selected in terms of the mass distribution as the relative error of the weight distribution was in the range of 3.4–5.6%.
The equivalent diameter of the stone increased proportionally to the mass from 0.123 to 0.154 m. The proof is the very high value of the correlation coefficient between these physical quantities, r = 0.927 (almost full correlation). Under natural conditions, the diameters of the stones vary greatly from 0.002 to 0.200 m, while stones with a diameter of 0.063–0.200 m are classified as coarse [
19].
Stones with a smaller mass and diameter were characterized by a greater sphericity than larger stones, as evidenced by the negative values of correlation coefficients: –0.462 and –0.451, respectively (average correlations). There were some inconsistencies in columns B and C, because sphericity increased from 0.825 to 0.856. The smallest stones were very close to a sphere, sf = 0.900. The sphericity of the stones in columns A–C was similar and was greater than that of the stones in columns D and E.
The computational densities of the stones were in the range of 2458–2861 kg·m
–3, and the overall mean was 2633 kg·m
–3 with a relative spread error of 3%. An even more close range was obtained for the real stone density of 2764–2913 kg·m
–3, with an overall mean of 2831 kg·m
–3 and a relative spread error of 1%. This result is evidence of the careful selection of the stones in terms of the dimensions and types of the stones’ parent rocks. The average specific density of limestones is in the range of 1790–2920 kg·m
–3. According to the American Society for Testing and Materials (ASTM D 153), the density of granite stones is 2560–2700 kg·m
–3 [
20]. Compared to the bulk density of soil of 1300 kg·m
–3, the bulk density of the stones is 2650 kg·m
–3 [
19]. There are no physical properties of stones in the available literature. In the meta-data analysis, it was noted that among the most important parameters characterizing the soil, in many cases stone content and soil moisture were missed [
19]. These authors concluded that a proper soil texture analysis cannot be performed if the stone content is missing.
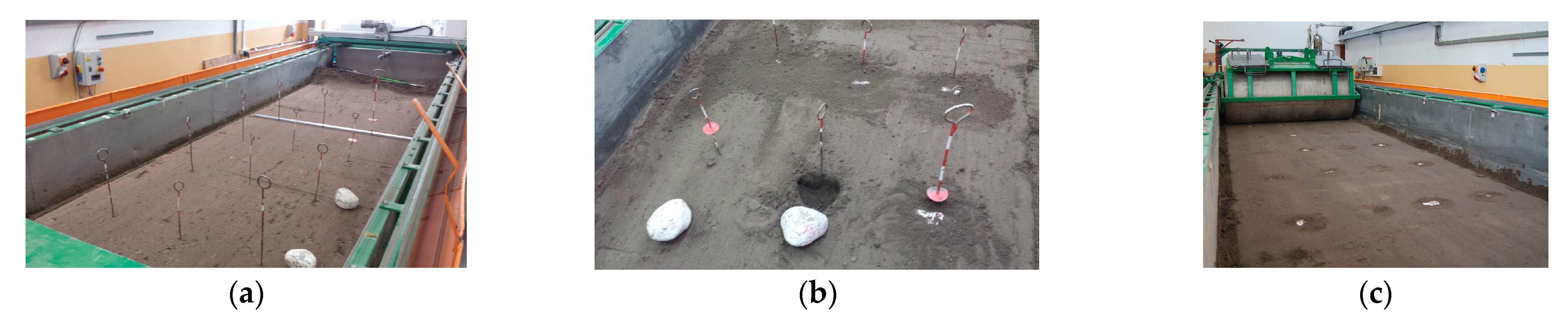
3.2. Movement of Stones Embedded in the Soil under the Influence of the Forces of Working Elements
Based on the analysis of the correlation of the assumed parameters [
21], it was found that the angle of the resultant force in the horizontal plane relative to the direction of the tool movement
αFxy almost fully correlates (r = 0.979) with the directional coefficient of the resultant force in the horizontal plane
kFxy (
Table 6).
Therefore, the angle
αFxy was removed from further analysis. The other six parameters are sufficient to fully characterize the movement of stones embedded in the soil. The values of these parameters in relation to the tested factors are summarized in
Table 7.
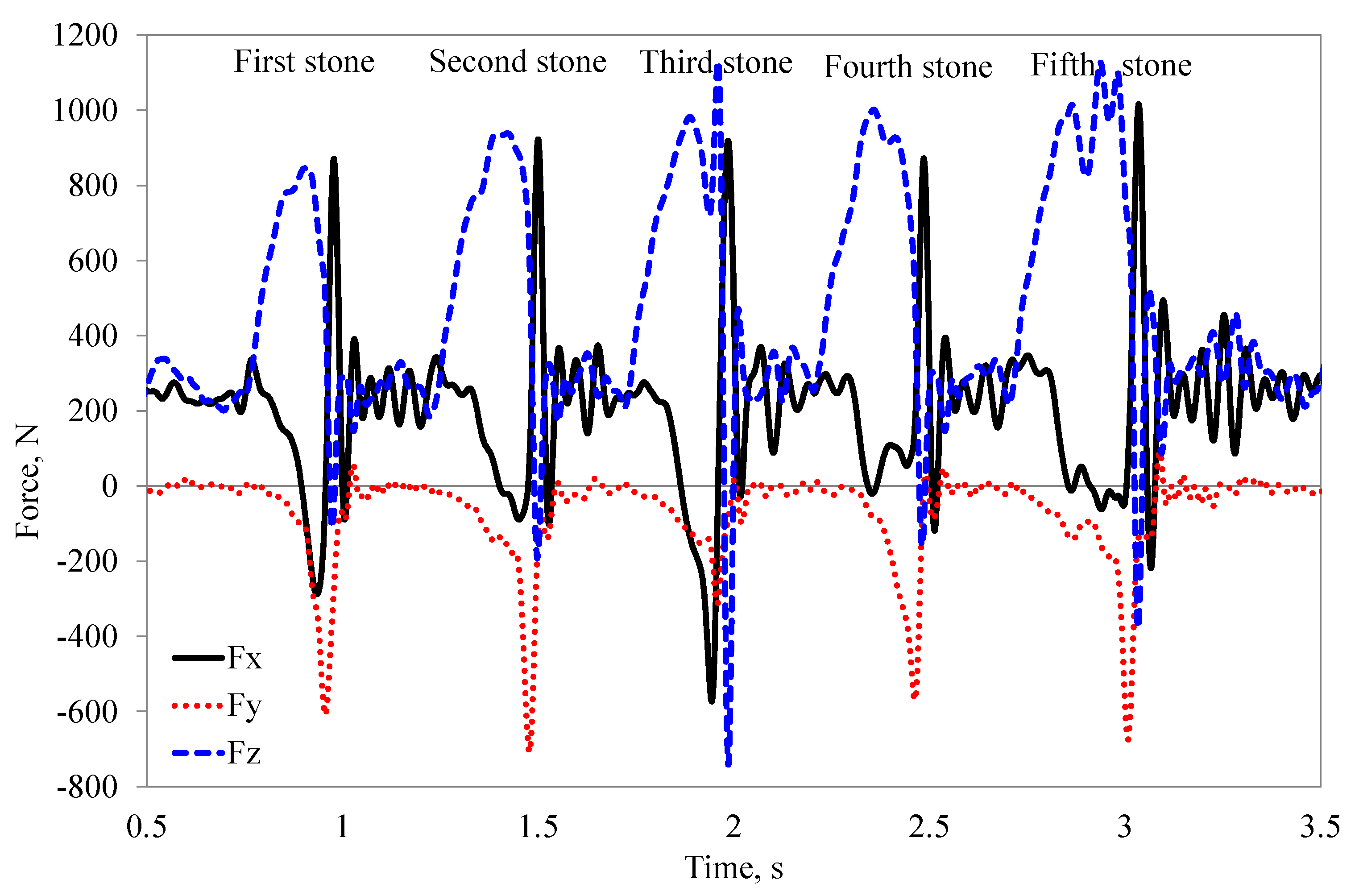
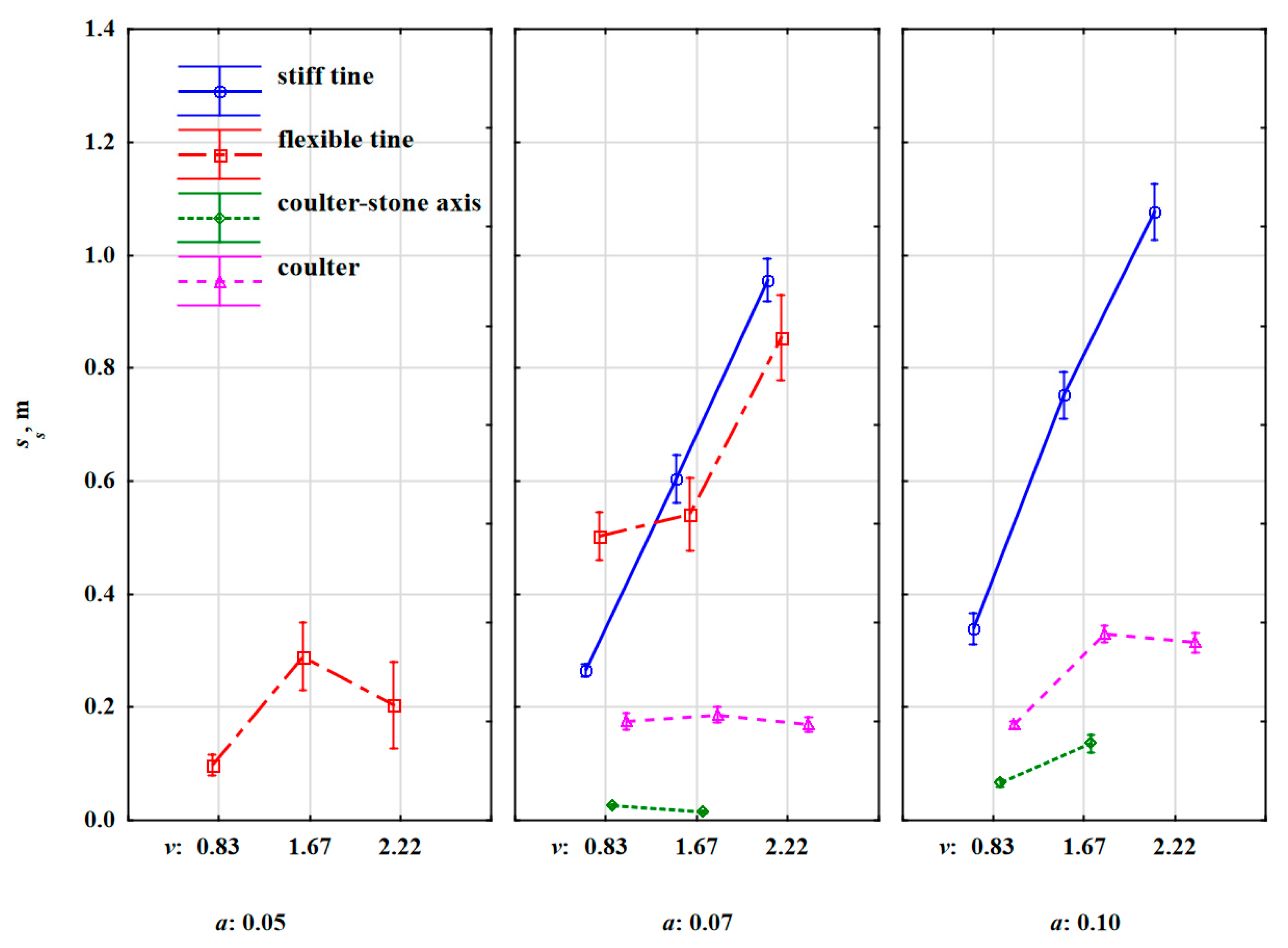
The greatest distances travelled by the stones were caused by the extortions from the stiff tine (
Table 7). This distance strongly depended on the working speed and to a smaller extent on the working depth (
Figure 9).
At the speeds of 0.83, 1.67 and 2.22 m·s
–1 and the depth of 0.07 m;
ss was 0.26, 0.60 and 0.96 m, respectively, and at a depth of 0.10 m, it was greater by 12–31% and was 0.34, 0.75 and 1.08 m, respectively. At a higher working speed of the tool, the stone obtained greater kinetic energy and was thrown out at a greater distance than at a lower speed. This effect of working speed is more visible for sandy soils [
9].
After overcoming the inertia forces, the stone embedded in the soil achieved acceleration, which was the greater the higher the working speed was, and this resulted in a greater distance over which the stone was thrown out by the stiff tine (
Figure 10a). The extent of cracking in the soil layer at a higher working depth of the tool was greater, and the movement of the stone began earlier, even before contact with the tool, obtaining higher kinetic energy than at a shallower depth.
These results correspond to greater soil dispersion at higher working depths [
10]. However, in the tests performed on sand in relation to a 0.038 m wide stiff tine with a soft steel hemisphere at a small speed range of 0.10–1.0 m·s
–1, no effect of speed on the movement of the hemisphere before contact with the tine was found [
16]. For both working depths of 0.07 and 0.10 m, the beak of the duckfoot sweep was below the middle of the stone’s thickness of 0.056 m. This condition was met even for the thickest stone of 0.12 m, for which the centre of thickness was 0.06 m. In these conditions, the movement of the stone began with the wedge of the cut-off soil layer even before the contact between duckfoot and the stone. Such an extent of soil fracture is characteristic of wide tools. Wide tools fracture the soil upward and forward and tend to loosen the soil in a crescent shape [
22]. Wide tools are those whose width is greater than the working depth, i.e., the blade shape factor (depth/width) is less than 1.0 [
23]. A duckfoot with a width of 135 mm working at a depth of 0.05–0.10 m can be classified as a wide tool, because the blade shape factor is 0.37–0.74. For wide tools, only forward soil movement is considered, and this problem is analysed in 2D [
24].
The fracture range of the soil wedge stopped for a moment in front of the stone during the work of the stiff tine at a greater depth. As the tool continued to move, the stone began to move with the soil wedge embracing the stone, and at the same time the stone pushed the soil wedge created by the stone forward, which deepened the cracking of the soil compared to the set working depth for the duckfoot. The soil in front of the stone was not cut but pushed, as by a very blunt edge of a blade [
25]. With further pressure of the tool, the stone embedded in the soil achieved high acceleration and was thrown out to a distance proportional to the working speed of the tool.
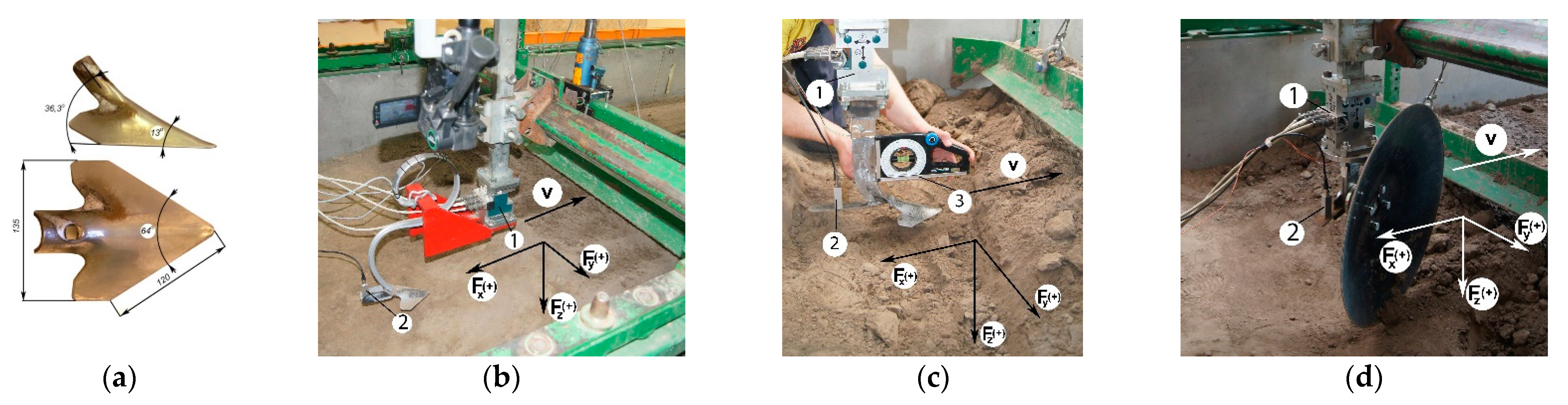
During the work of the flexible tine at a working depth of 0.05 m, the beak of the duckfoot was at a depth close to the middle of the stone’s thickness. Under these conditions, the beak of the duckfoot hit the stone above the centre of the stone’s thickness or only slightly below, and the movement of the stone began without giving an initial speed through the cut soil. Under these conditions, the stone was pushed parallel to the soil for a while. As a result of the resistance, the flexible tine bent backwards, suppressing the impact. In many cases, the duckfoot attached to the flexible tine moved over the outer surface of the stone, causing it to move, rotate, or be slightly displaced (
Figure 10b). The low kinetic energy obtained by the stone contributed to the small distance travelled by the stone (0.10–0.29 m). As the centre of the thickness of the stones was in the range of 0.04–0.07 m, the place of impact of the duckfoot’s beak with the stone was variable and hence the changes in
ss vs. the working speed of the tool were inconclusive (
Figure 9). Increasing the working depth of the flexible tine to 0.07 m resulted in a change in the duckfoot–stone relationship, and
ss increased with the working speed of the tool. The distance travelled by the stone after the reaction with the flexible tine was 10–11% smaller than with the stiff tine in the speed range 1.67–2.22 m·s
–1. The flexible tine, encountering the resistance of the stone, was deflected back, absorbing some of the energy from the impact with the stone; hence, the kinetic energy transmitted by the flexible tine was smaller than that of the stiff tine. At the lowest working speed of the tool, 0.83 m·s
–1, the vibrations of the flexible tine were the lowest and the tine’s reactivity to the resistance of stone embedded in the soil was greater than at higher working speeds. The flexible tine tilted back, accumulating greater kinetic energy, and in the acceleration in the forward direction transferred energy to the stone which under its influence was moving. At the lowest working speed, the oscillations of the flexible tine were smaller [
9] and the impact of the flexible tine with the stone was more precise than at higher operating speeds. During the work of the flexible tine at the speed of 0.83 m·s
–1, the distance travelled by the stone was 0.50 m and was 92% greater than for the stiff tine. These explanations are based on the description of the cyclic reaction of a flexible tine working in non-stony soil [
15]. The peak load refers to the rearward hitting, and then the soil was loaded on the deviated tine and, after exceeding the strength, the soil crack and the tool entered the cracked soil, reducing the draught force. In the case of a stone embedded in the soil, the effect of cracking the soil was smaller as the stone provided additional resistance and possibly a greater impulse of force caused increase in the distance travelled by the stone.
During the work of the coulter covering stones, the stone displacement distances were small, and at the working depth of 0.07 m, they did not exceed 0.20 m, regardless of the working speed (
Figure 9). At a working depth of 0.10 m, the displacement of the stones increased almost twice, but only at higher working speeds of 1.67–2.22 m·s
–1 when the stones obtained higher kinetic energy. The stones embedded in the soil were displaced with the cut off furrow and at a lower working depth (0.07 m), the stones were partially recessed into the furrow at a greater working depth (0.10 m), and they were moved to outside the cut furrow (
Figure 10c).
Compared to the coulter covering stones, the work of the coulter coinciding with the axis of the row of stones was more fine, because the cutting edge of the coulter only slightly moved the stones (
Figure 9) in the direction of movement and pressed the stones into the soil (
Figure 10d). Most often, the coulter rolled centrally on the stones or with an offset relative to the centre of the width of the stones, pressing the stones into the face or much less frequently moving the stones towards the cut furrow. The cutting edge of the coulter met the embedded stone in the compacted soil. This observation was very critical, as there were temporary but sudden overloads of the coulter disc and the clamping element which were transferred to the tool. In real conditions, these overloads can cause structural parts of the tool to break or bend. Therefore, agricultural implements with coulters used for the cultivation of stony soils should be (and most often are) equipped with elements protecting against their damage.
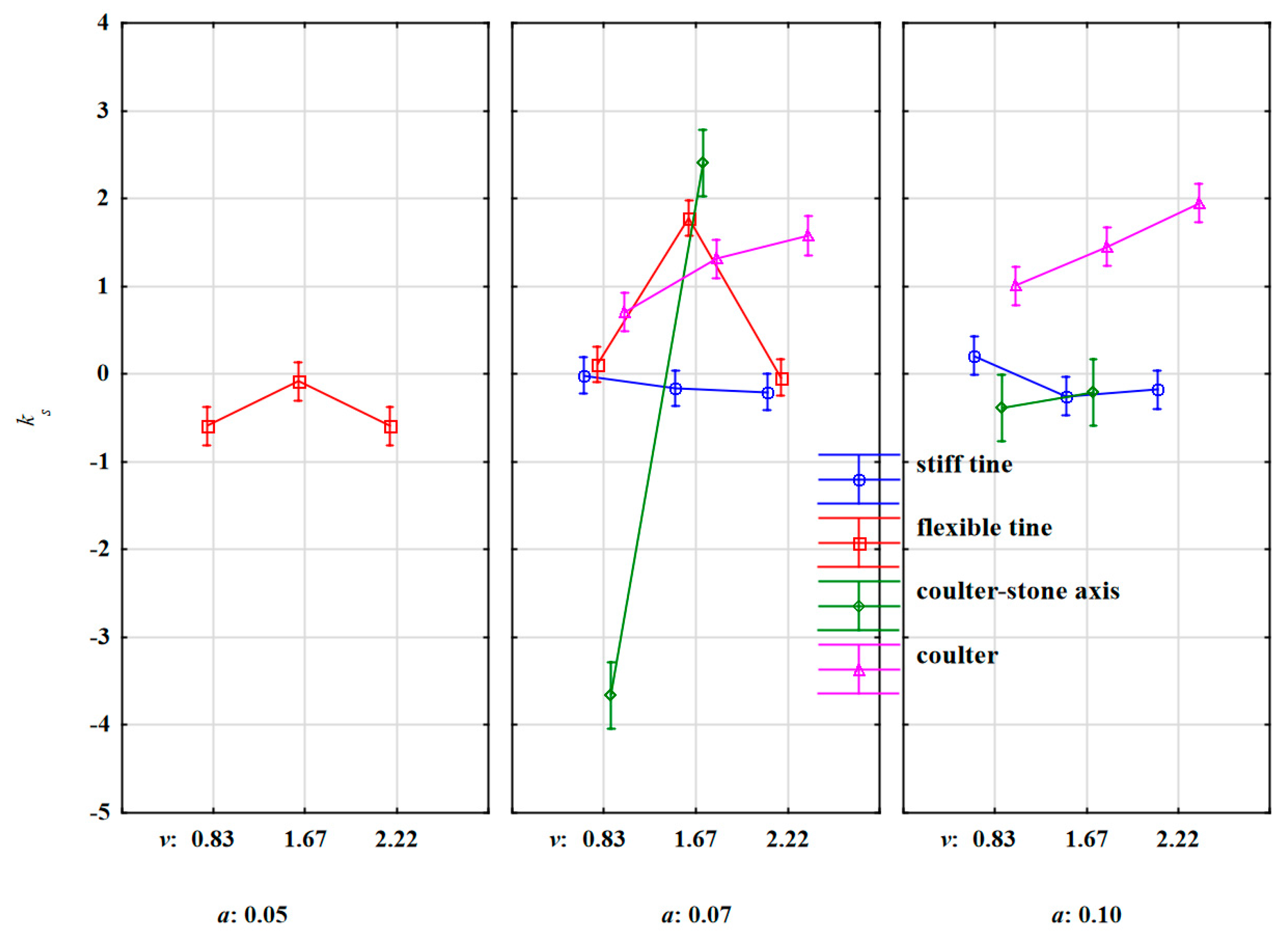
3.3. Stone Movement Direction ks, Angle of Stone Movement αs and Numerical Stone Movement Scale NSMS
The values of the directional coefficients of stone movement under the action of stiff and flexible tines were strongly differentiated (
Figure 11). The large standard deviation values (
Table 7) were also deemed ambiguous because
ks was both positive (stone movement to the right in relation to the tool movement direction) and negative. Therefore, it can be concluded the direction of motion was random and resulted from the random distribution of reactions in the place of impact of the duckfoot with the stone.
During the work of the coulter impacting the stone, the slope factor of stone movement increased with the working speed (
Figure 11). At a higher working depth and a higher working speed of the tool, the stone was pushed forward in the direction of the tool’s movement, and then moved along with the soil to the right. Together with the working speed of the tool, the stone obtained higher kinetic energy and was moved with an increasing slope factor of stone movement. A positive value of the slope factor for the stone movement (1.33) during the work of the coulter impacting the stone indicates the unambiguous direction of stone displacement, as evidenced by the relatively small value of the standard deviation 0.02.
Similarly, during the work of the coulter-axis stones, the values of the slope factor for stone movement had a strongly different trend for both working depths. The values of these factors increased with the working speed of the tool; faster for a smaller working depth of 0.07 m than for 0.10 m (
Figure 11). The highest displacement of stones to the left in relation to the direction of movement was recorded during coulter working at the depth of 0.07 m and the working speed of 0.83 m·s
–1. As mentioned, the displacement of the stones to the left was due to the fact that the coulter pressed the stone into the soil and simultaneously moved the stone towards the face (
Figure 10d). The highest slope factors for stone movement to the right in relation to the direction of the coulter-axis stones were recorded at the working depth of 0.07 m and the working speed of 1.67 m·s
–1. The work of the coulter-axis stones was more stable at the depth of 0.10 m. In summary, the values of slope factors confirm the observed movement of stones under the influence of the forces of working elements (
Figure 10).
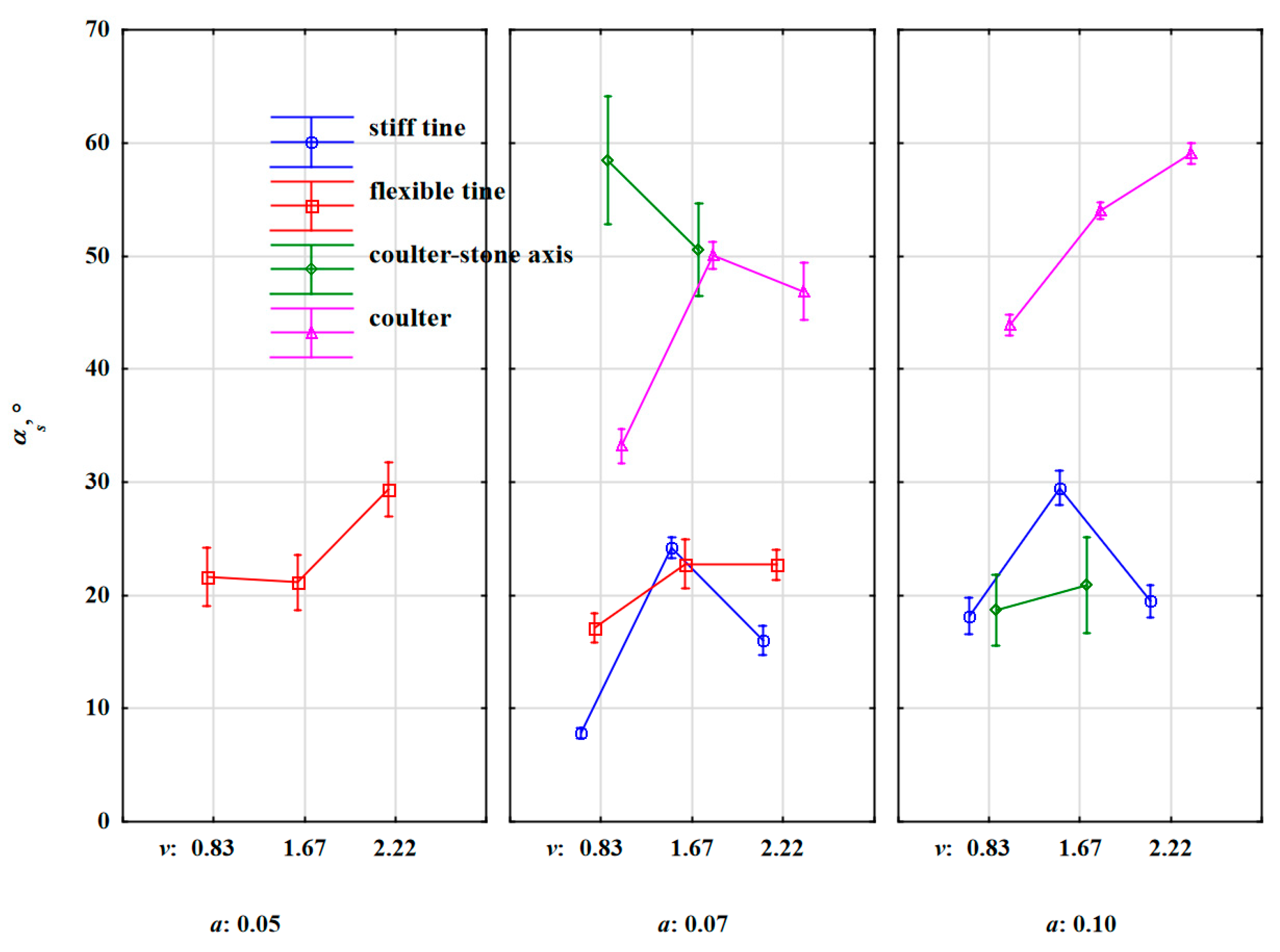
The slope factor for stone movement is an important parameter indicating the behaviour of stones hit by the working element. In practice, it is also important to use the absolute value of the angle of stone movement with respect to the direction of the tool’s movement.
During the work of the flexible tine at a depth of 0.05 m, the stones were displaced at angles of 21°–29° (
Figure 12). Increasing the working depth to 0.07 m caused only a slight reduction in these angles to 17°–23°.
The stiff tine working at a depth of 0.07 and 0.10 m threw out stones at similar angles within the range of 8°–29°.
The impact of the working speed on the angle of stone movement for both tines was ambiguous, which confirms the random nature of the stone’s reaction to the extortions from both the flexible and the stiff tines. However, the standard deviation was 43% greater for the flexible tine, which indicates a larger dispersion of values (
Table 7).
High values of stone movement angles were recorded during the work of the coulter covering stones especially at a greater working depth (0.10 m), αs = 44°–59°. The stone movement angles recorded during the work of the coulter-axis stones at a depth of 0.07 m, αs = 51°–58°, were also in this range. Increasing the depth to 0.10 m caused a significant reduction in the angles of stone movement, αs = 19°–21°.
Compared to the slope factor for the stone movement, the angle of stone movement was correlated to a greater degree with the factors and between parameters (
Table 6). The correlation was average, but negative between the angle of movement of the stones and the distance travelled by the stones, r = –0.311. The correlations were high between the angle of stone movement and the directional coefficient of the specific force resultant in the horizontal plane
kFxv and the angle of the resultant force in the horizontal plane relative to the direction of the tool movement, because the correlation coefficients were 0.485 and 0.506, respectively. The higher the distance travelled by the stone, the smaller the angle of stone movement, i.e., the stones were directed more towards the tool’s movement. The positive correlation coefficients of the angle for stone movement
αs with
kFxy and
αFxy indicate one-way reactions of these parameters during the impact of the working element with the stone. The direction of extortions from the tool influenced the angle of the stone movement in relation to the tool movement direction.
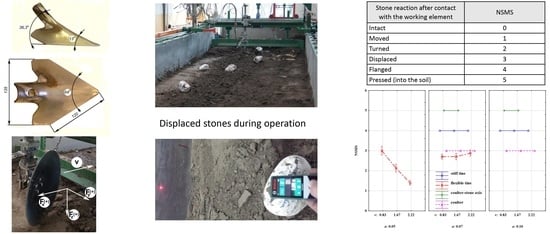
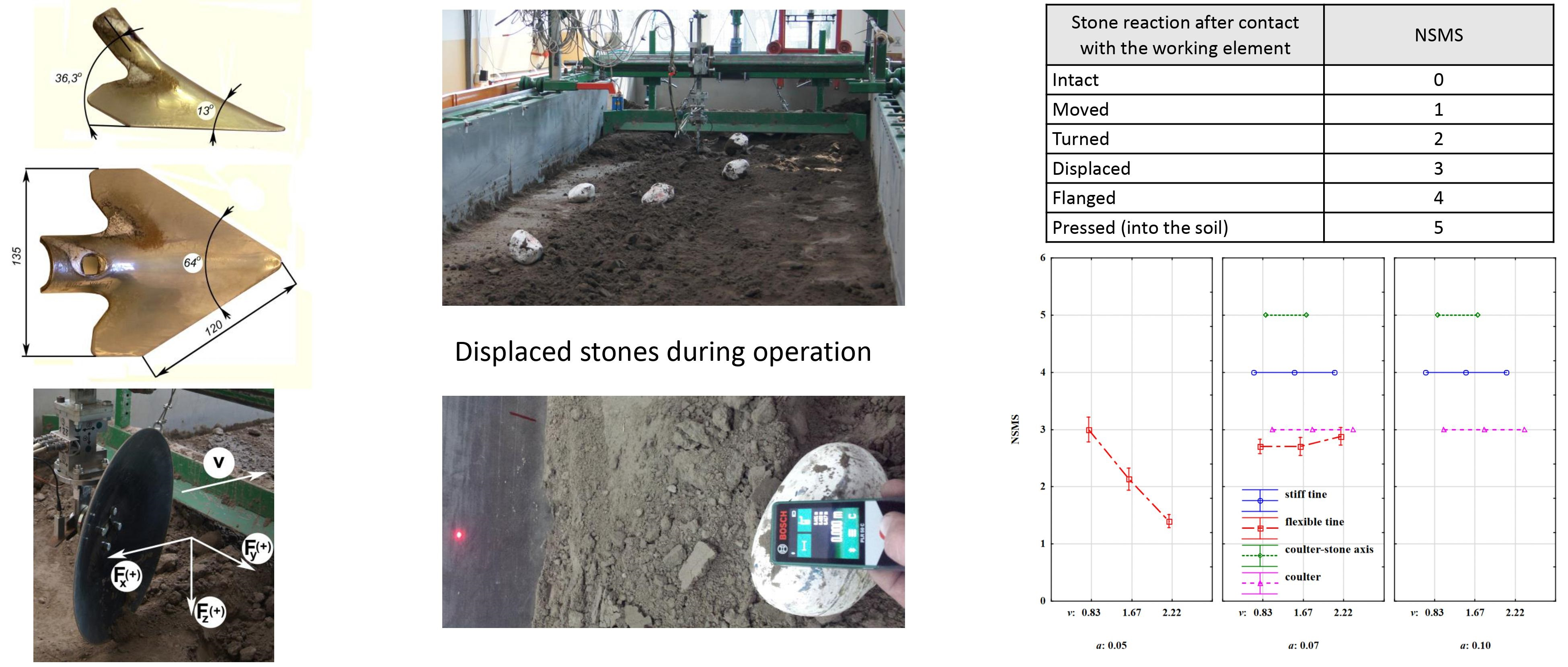
Although the behaviour of the stones under the influence of the tools was characteristic for a given type of tool, the most diversified stone movement was recorded during the work of the flexible tine working at a depth of 0.05 m. Interestingly, at the lowest working speed of 0.83 m·s
–1 the stones were moved (
Figure 13). At the speeds of 1.67 and 2.22 m·s
–1, the stones were properly rotated and moved as strong oscillations and backward deflections of the tine contributed to the penetration and movement of the duckfoot along the outer surface of the stones. For these three depths, the
NSMS values were 3.0, 2.1, and 1.4, respectively. During the work of the flexible tine at a greater working depth of 0.07 m, the stones were moved regardless of the working speed of the tool, and the
NSMS value was 2.7–2.9. During the work of the stiff tine and the coulter covering the stones and the coulter-axis stones, the stones were thrown out, moved and pressed into the soil, respectively, regardless of the speed and working depth of the tool. The
NSMS values were 4.0, 3.0, and 5.0, respectively (
Figure 13). The developed
NSMS confirms the previously described behaviour of stones under the influence of tool extortions, and this is the basis for assessing the movement of stones hit by the tested tools. It can be useful for assessing stone movement under the impact of other types of tools or working elements.
3.4. The Directional Coefficient of the Specific Force Resultant in the Horizontal Plane kFxy and Specific Work Required to Remove the Stone Embedded in Compacted Soil Ls
The directional coefficient of the specific force resultant in the horizontal plane
kFxy allows for the interpretation of the direction of the push on the stone when the tool collides with the stone. In almost all cases, the resultant force in the horizontal plane was directed to the right, as evidenced by the positive values of the directional coefficient (
Table 7,
Figure 14).
During the work of the flexible tine, the direction of the resultant force was the most ambiguous (
Figure 14). At the working depth of 0.05 m, a certain trend decreasing with the working speed could be observed. At higher working speeds of 1.67–2.22 m·s
–1 the impacts between the tool and stone were more central. The most symmetrical impacts were recorded during the work of the stiff tine, because for both working depths of 0.07 and 0.10 m, and regardless of the working speed the values of the directional coefficient were small and in a narrow range of 0.03–0.06. They were equivalent to very small angles of deviation of the resultant force from the direction of the tool movement which were 1.8°–3.0°.
The highest values of the directional coefficient of the resultant force were recorded during work of the coulter covering the stone. During the work of the coulter covering the stone at the depth of 0.07 m, kFxy = 0.78–0.89, the angle of deviation of the resultant force was 37.9°–41.8°. At this working depth, the directional coefficient of this force slightly increased with the working speed. At a higher working depth of 0.10 m, kFxy was slightly lower than at a = 0.07 m, and practically did not depend on the working speed and was 0.75–0.78. High values of the directional coefficient of the resultant force during the work of the coulter covering the stone were related to the rake angle of the coulter of 23° in relation to the direction of movement and the unambiguous character of the movement of stones embedded with the soil.
A completely different response of the direction of the resultant force in the horizontal plane was during the work of the coulter-axis stones when the edge of the disc assumed a random position in relation to the stone but pressed down on the stone. The consequences of these random contacts of the coulter edge with stones were ambiguous changes and large differences in the
kFxy values, especially at a greater working depth of 0.10 m as the values varied from –0.04 to 0.64 (
Figure 14).
The
kFxy values were average, but inversely correlated with
ss and the specific work required to remove the stone embedded in the soil
Ls, and the correlation coefficients were –0.365 and –0.332, respectively (
Table 6). The more the resultant force in the horizontal plane was deviated from the direction of movement, the shorter the distance the stone travelled and the smaller the specific work that was required to remove the stone.
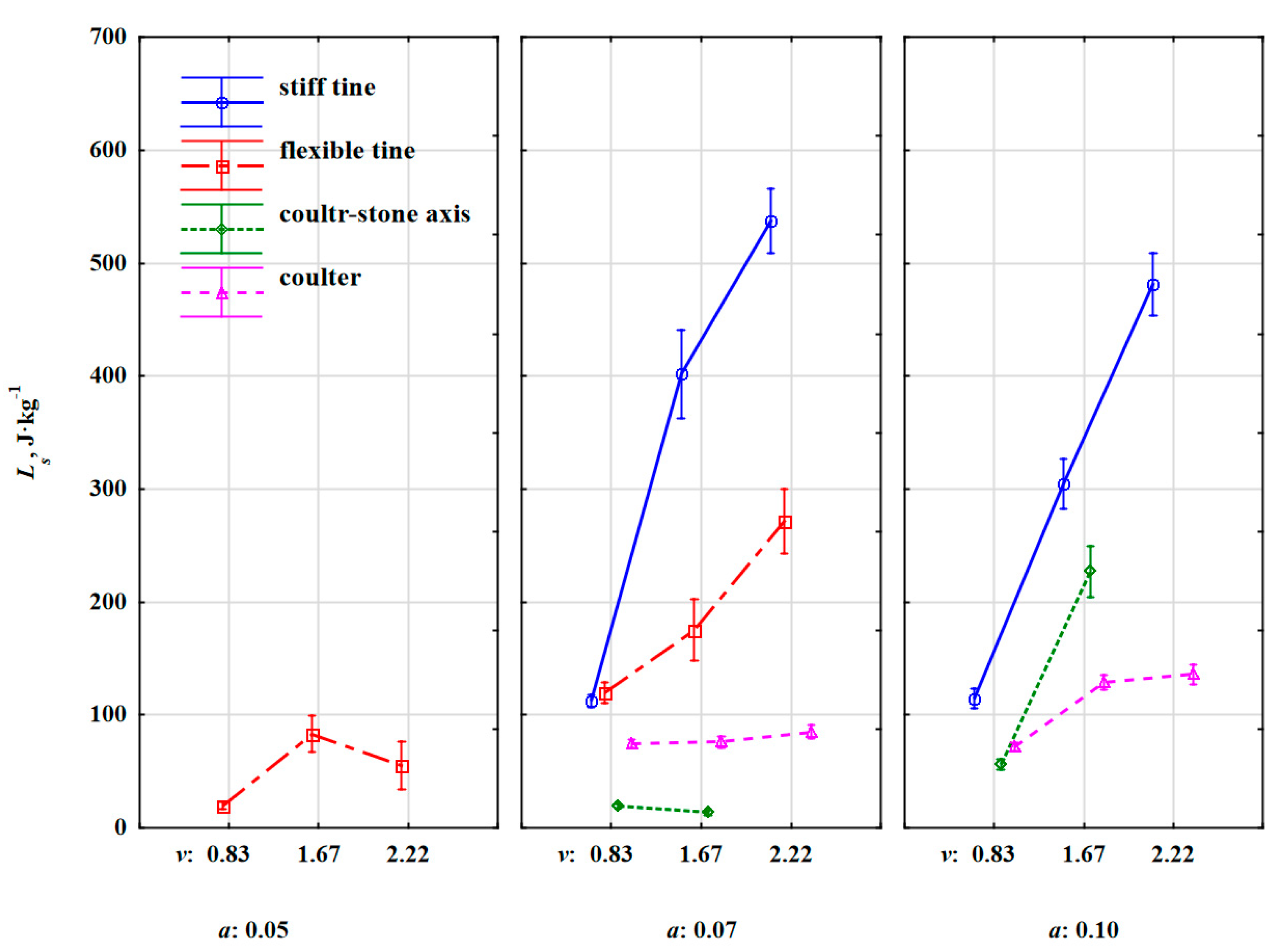
Changes in the specific work required to remove the stone embedded in the soil
Ls vs. speed and working depth (
Figure 15) were similar to changes in
ss (
Figure 9). The proof is the high value of the correlation coefficient between these parameters, r = 0.863 (very high correlation) (
Table 6).
One of the significant differences between
Ls and
ss were the values of this work for the flexible tine working at a depth of 0.07 m in relation to the values obtained for the stiff tine. At the lowest working speed of 0.83 m·s
–1, specific work had similar values for both flexible and stiff tines: 119 and 114 J·kg
–1, respectively. Compared to the relation of the distance travelled by stones for both tines (
Figure 9), a significant reduction in this work for the flexible tine was due to the lower value of the resultant force needed to remove the stone, which is a positive feature for flexible tines [
15]. This trend of significantly lower specific work values for the flexible tine compared to the stiff tine extended to higher working speeds of 1.67 and 2.22 m·s
–1, because the decreases in the values of this specific work were 74% and 77%, respectively.
The specific work Ls for the stiff tine in relation to the working speed maintained a similar trend as the characteristic of the distance travelled by the stone, while higher values of Ls were recorded for a smaller working depth of 0.07 m than for a greater depth of 0.10 m. The value of this specific work was more influenced by the specific resultant force (in N·kg–1) pressing on the stone embedded in the soil than by the distance ss. At a smaller depth of 0.07 m, the impact of the duckfoot beak with the stone was close to half of its thickness and the soil in front of the stone’s face was compressed, which suppressed the stone’s movement, but also generated a greater resistance force and consequently more specific work was needed to remove the stone than at a greater depth of 0.10 m. At the working depth of 0.10 m, the beak of the duckfoot was below the lower half of the stone thickness. The propagation of soil fracture starting from the duckfoot tip set the stone in motion without a sudden impact of the duckfoot with the stone. In addition, the stone was pushed upwards with the soil wedge at a shear angle without the additional compressing of the soil by a stone in a horizontal direction. Therefore, at the working depth of 0.10 m, the specific work required to remove the stone was on average 14% lower than at the depth of 0.07 m. The highest values of specific work were achieved at the working speed of 2.22 m·s–1, which were 537 and 481 J·kg–1, respectively.
The characteristics of specific work needed to remove the stone embedded in the soil by the coulter were similar to those of the distance travelled by the stone. Higher differences were found when the coulter was working in the axis of the stone row at a greater working depth of 0.10 m, which was caused by a very dynamic reaction when the disc edge hit the stone and forced it into the soil. Increasing the working speed of the coulter from 1.67 to 2.22 m·s–1 contributed to a four-fold increase in the specific work Ls from 56 to 227 J·kg–1. This result is evidence of the enormous overload that occurs when rolling over the stone while pressing it into the compacted soil.
The specific work required to remove the stone embedded in compacted soil related to the mass of stone is a good parameter for comparing the effects of tool work in stony soil. Since the specific work contains the specific force as the reaction of the tool to the impact with the stone and the distance travelled by the stone after the impact, Ls is a valuable parameter describing the relationship between the tool and the stone embedded in compacted soil. Further research may be conducted on the relationship between the tool and the stone embedded in loose soil or on the surface of the soil to obtain an insight into the differences in the phenomena occurring during and after the tool collides with the stone. It would also be advisable to study the stone’s movement trajectory for different conditions of stone location.


 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}