
Damage Identification Method for Medium- and Small-Span Bridges Based on Macro-Strain Data under Vehicle–Bridge Coupling

 ,
,
Abstract
:1. Introduction
2. Theoretical Basis
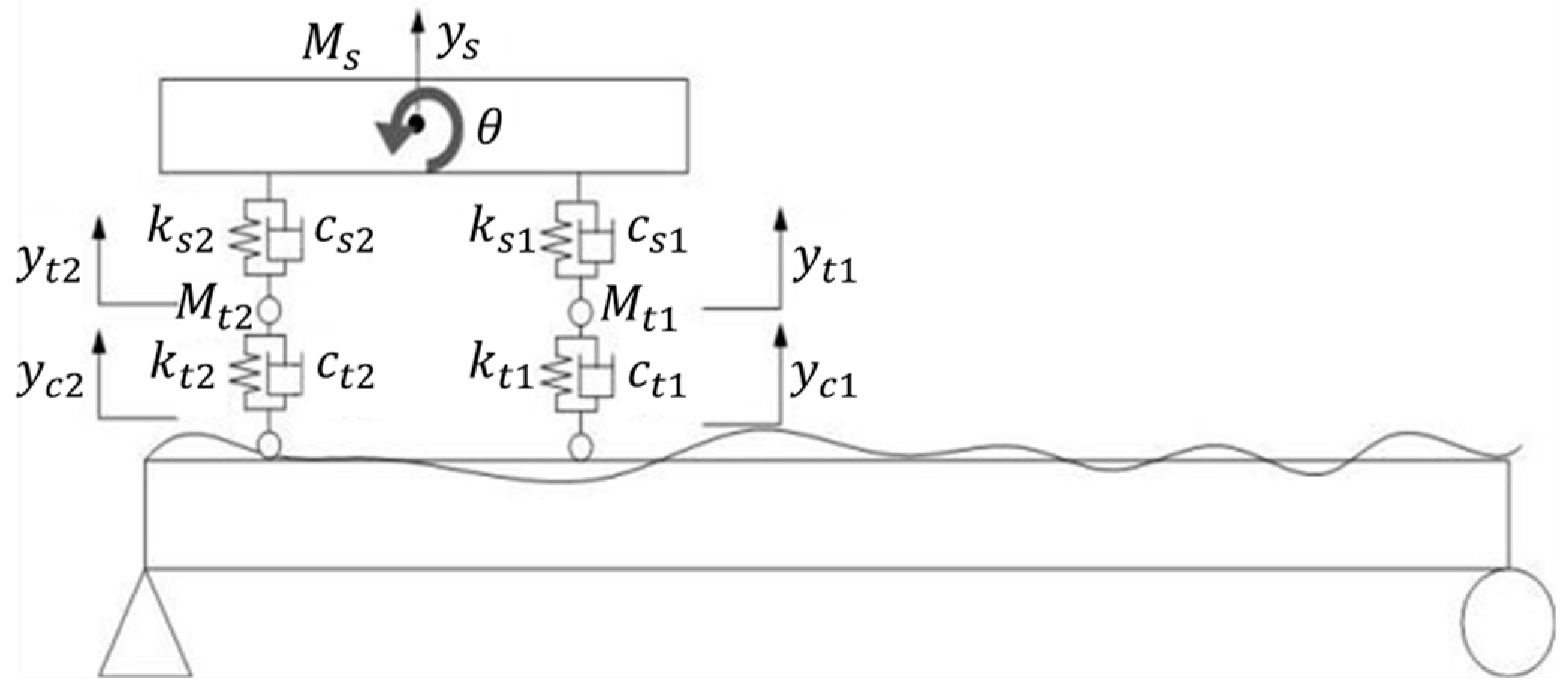
2.1. Damage Identification Based on Vehicle–Bridge Coupling Theory
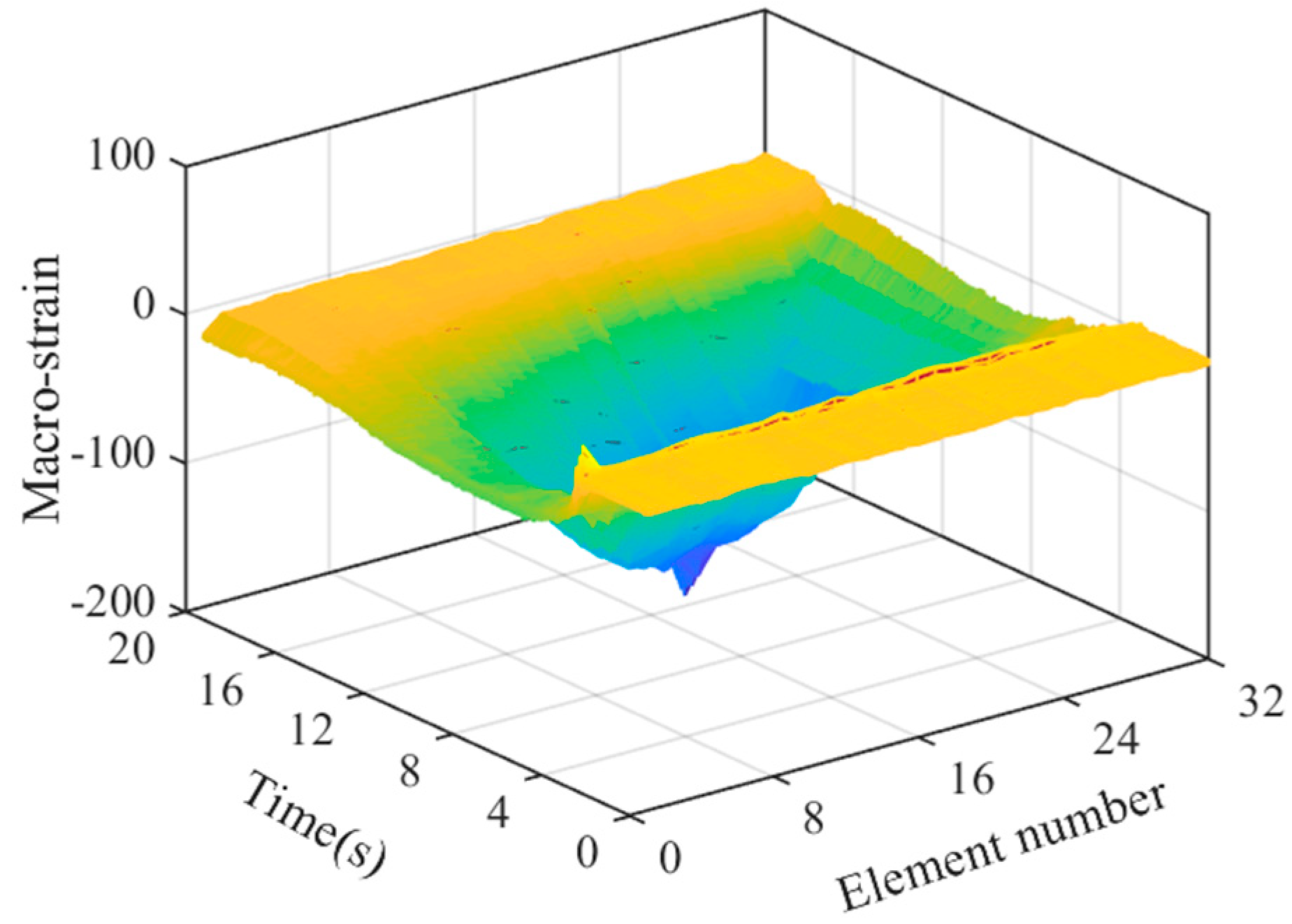
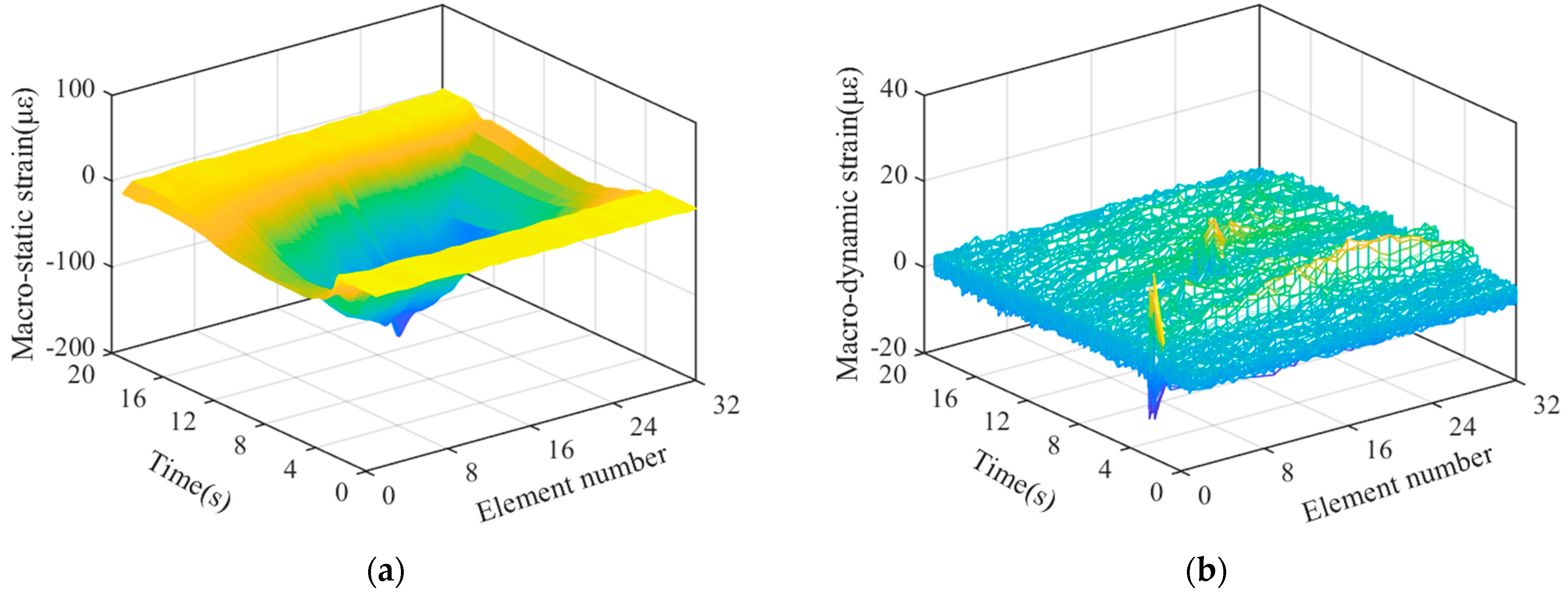
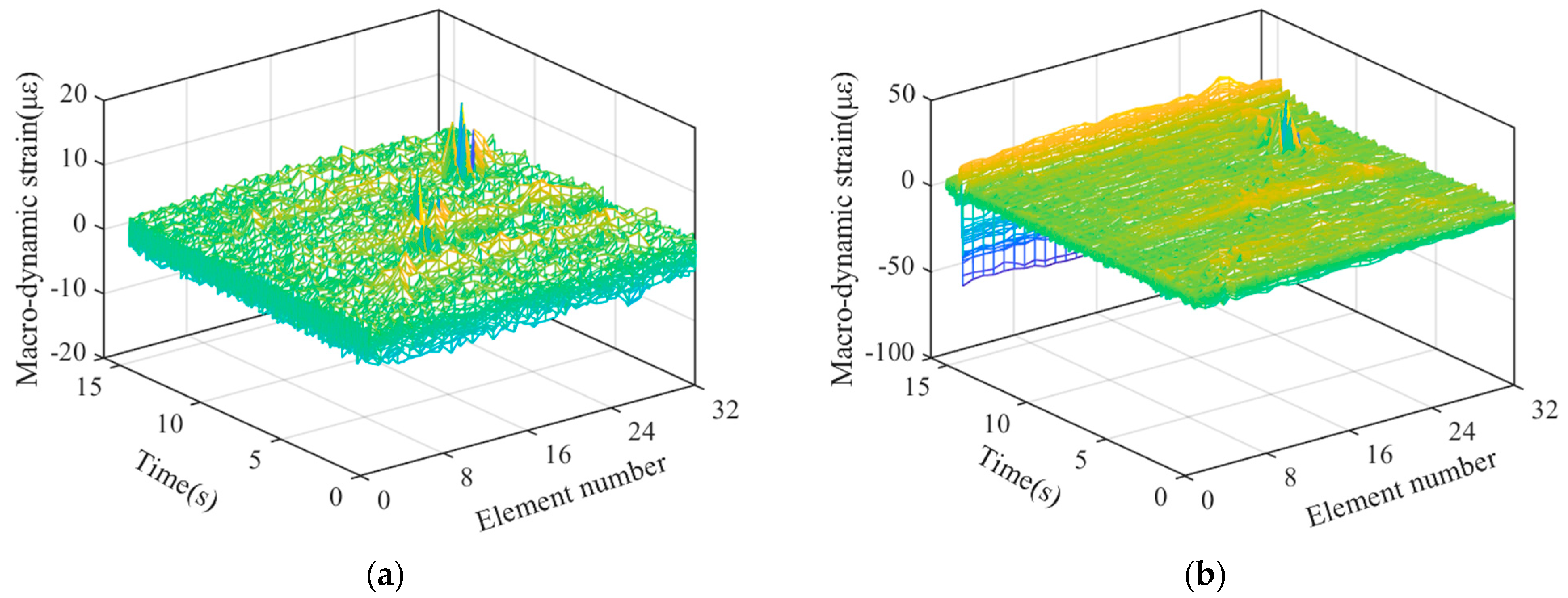
2.2. Reconstruction of Macro-Strain by Wavelet Transform
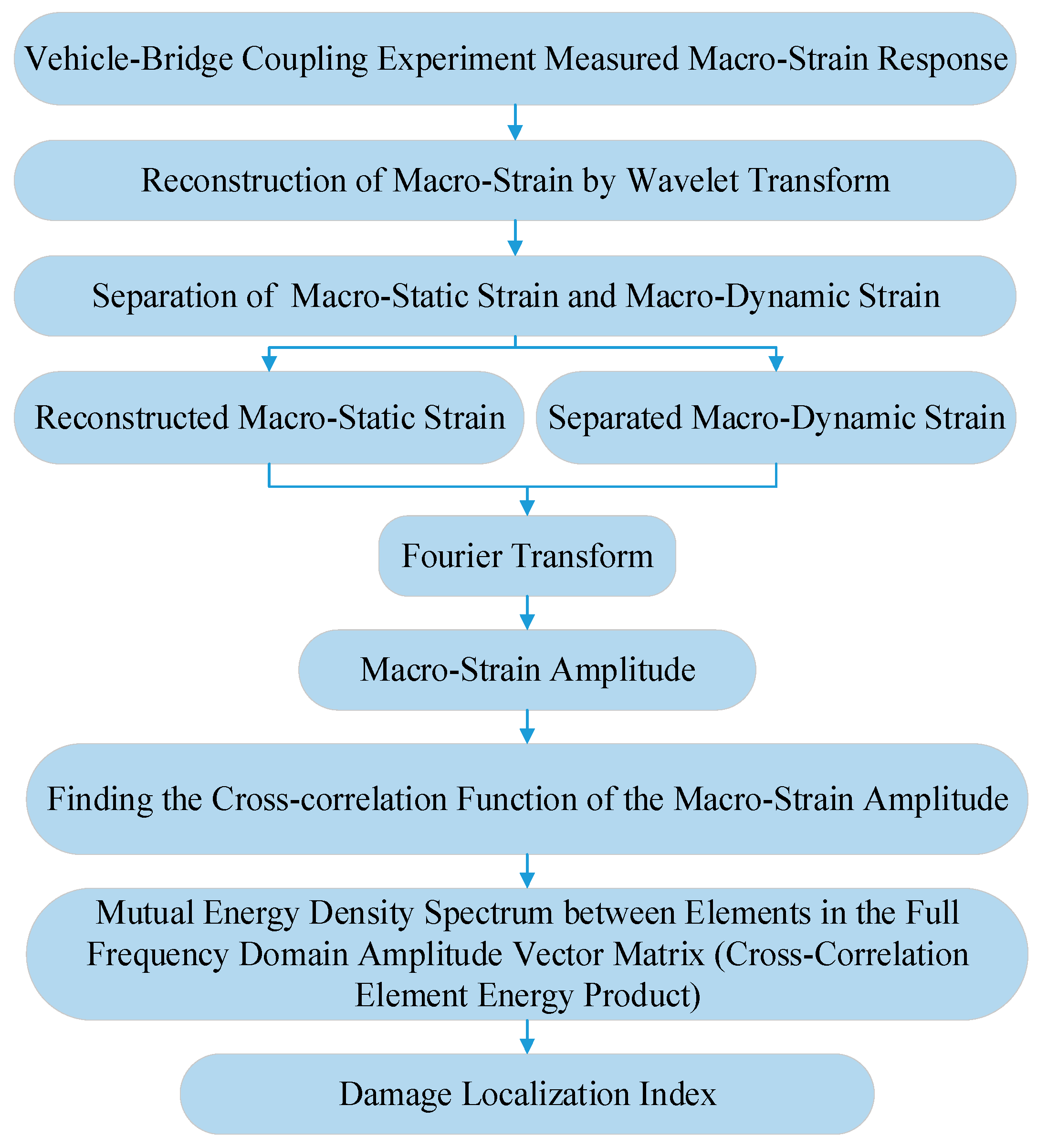
3. Construction of Damage Indices
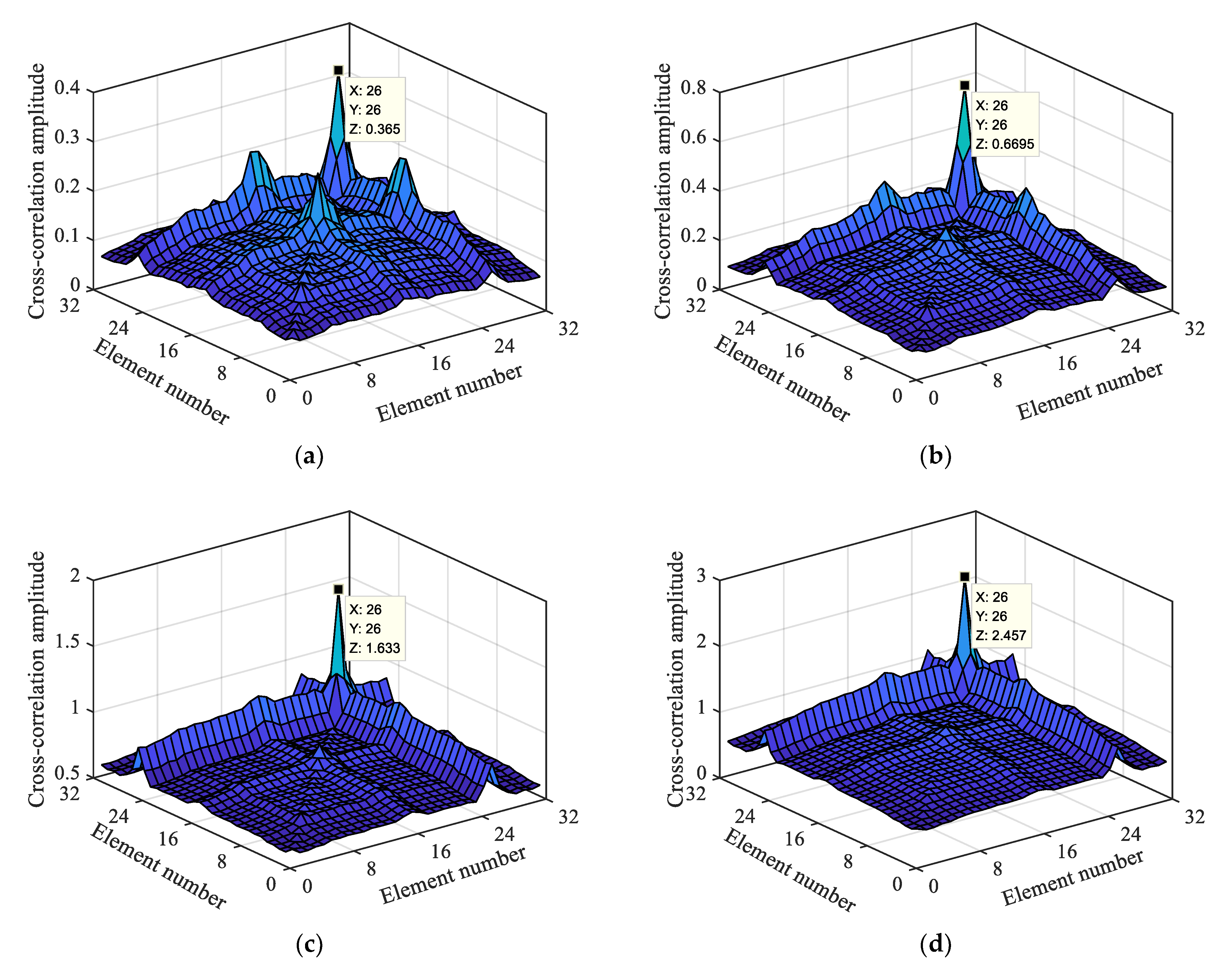
Damage Localization Index Based on Macro-Strain
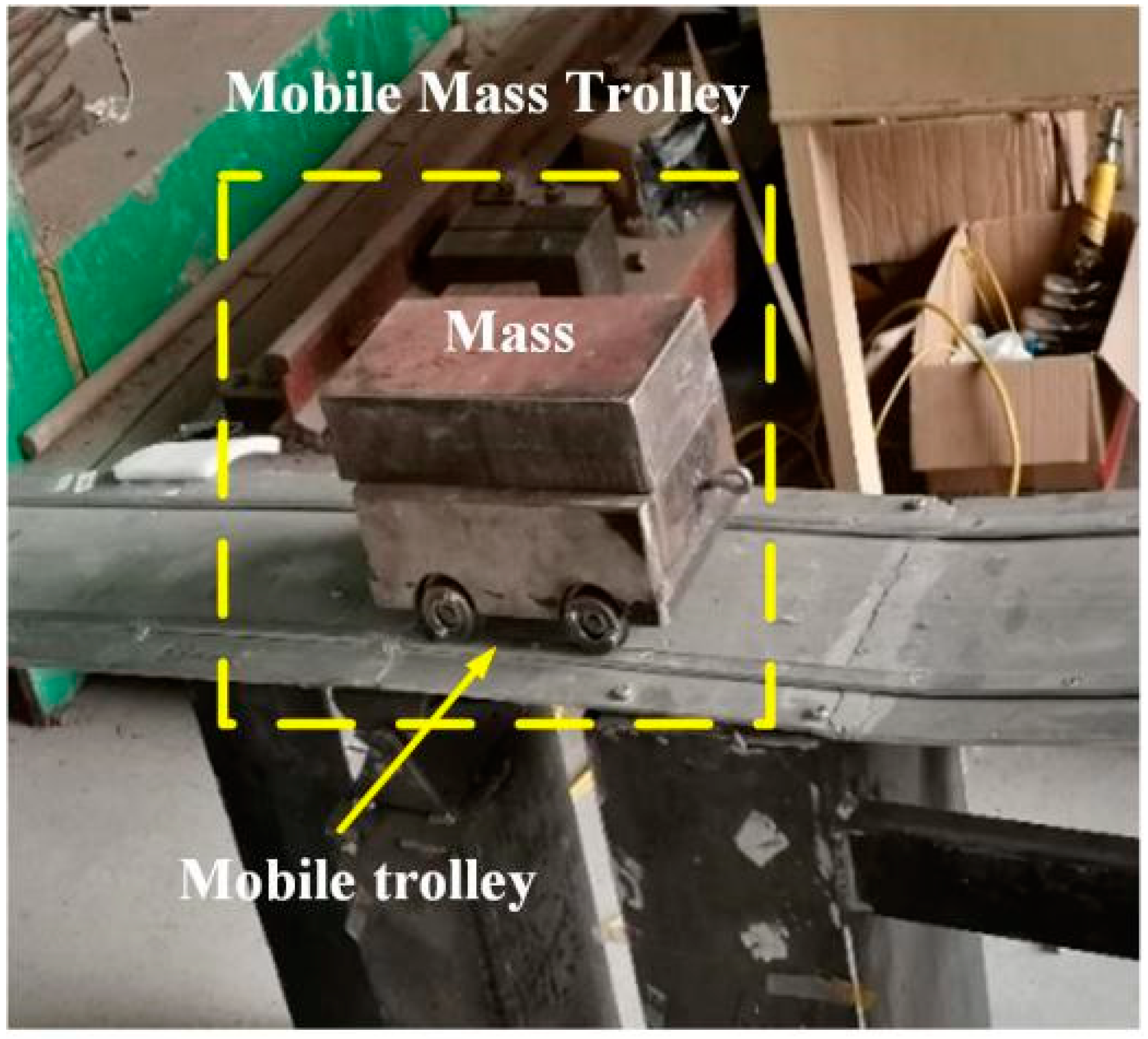
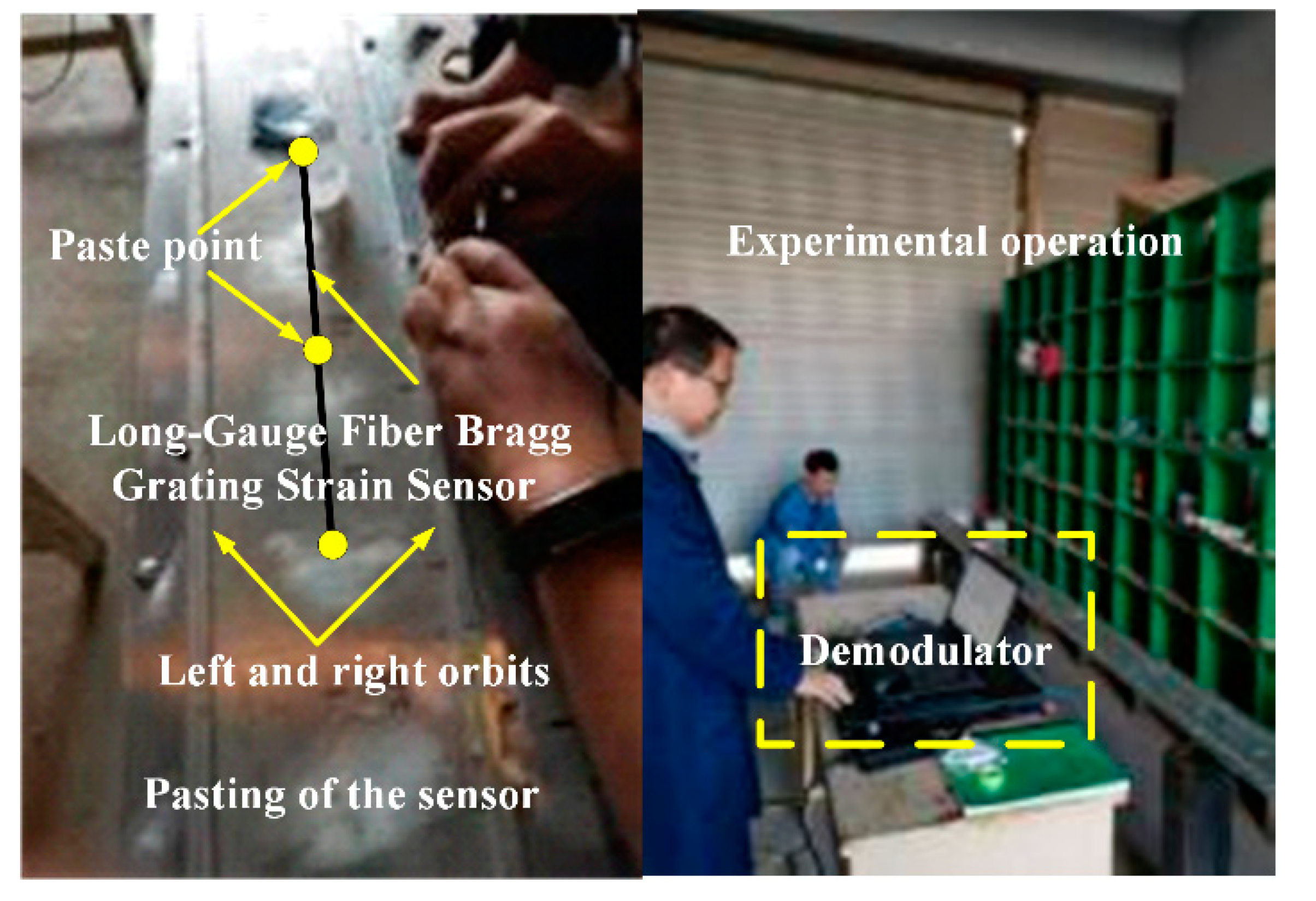
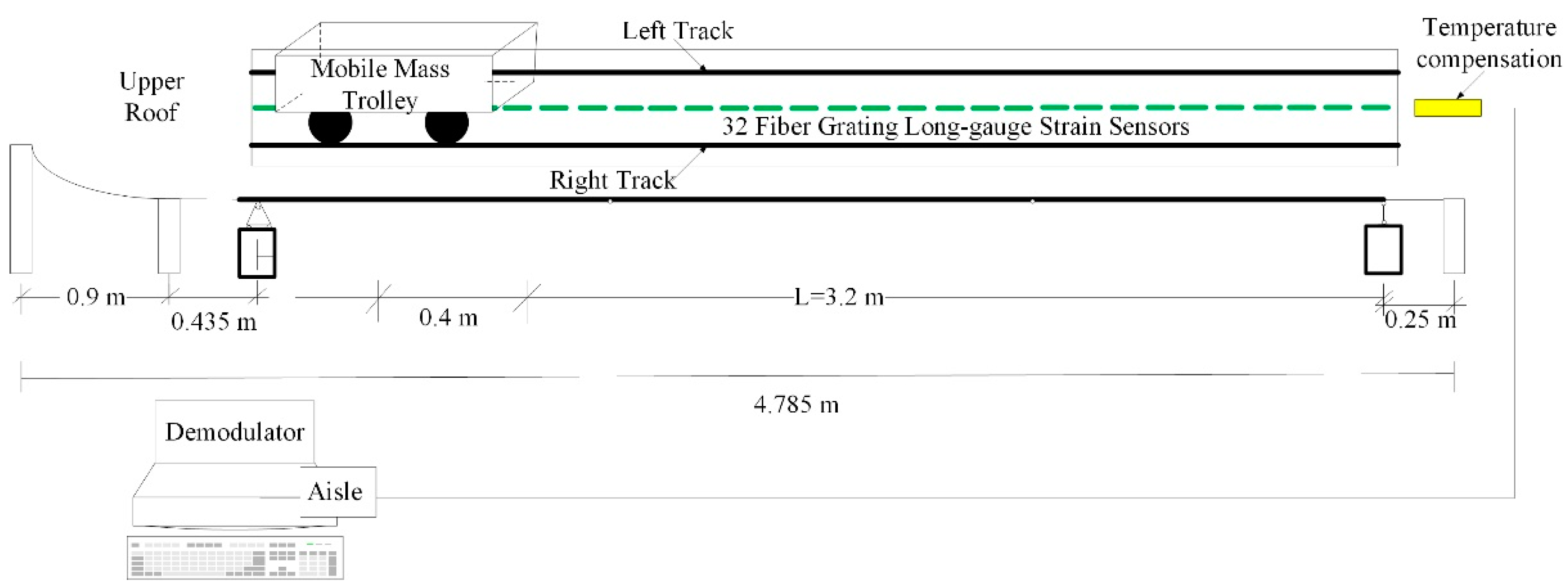
4. Experimental Analysis
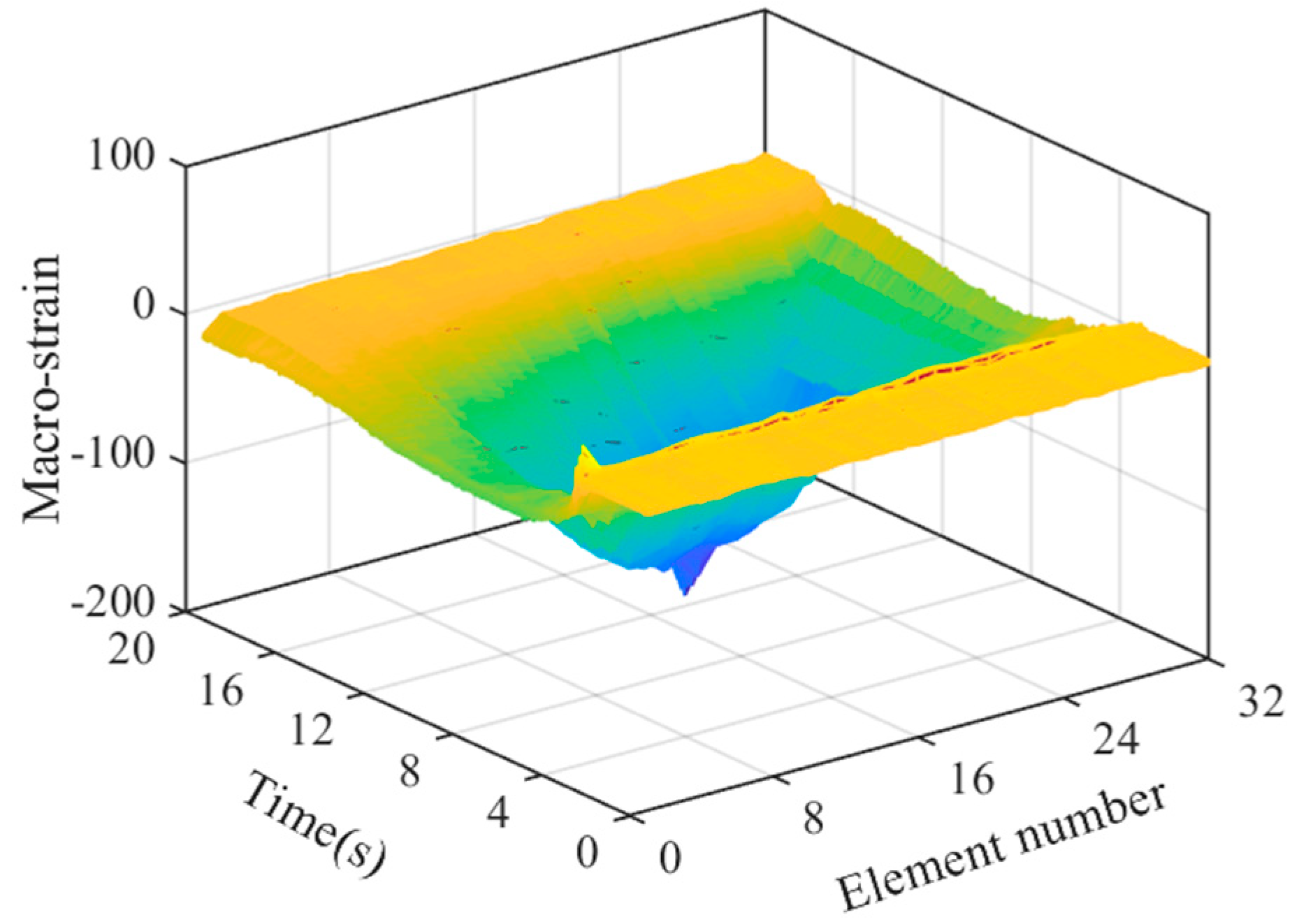
4.1. Reconstruction and Separation of Macro-Strain by Wavelet Transform
4.2. Damage Localization and Identification
4.2.1. Vehicle-to-Bridge Mass Ratio
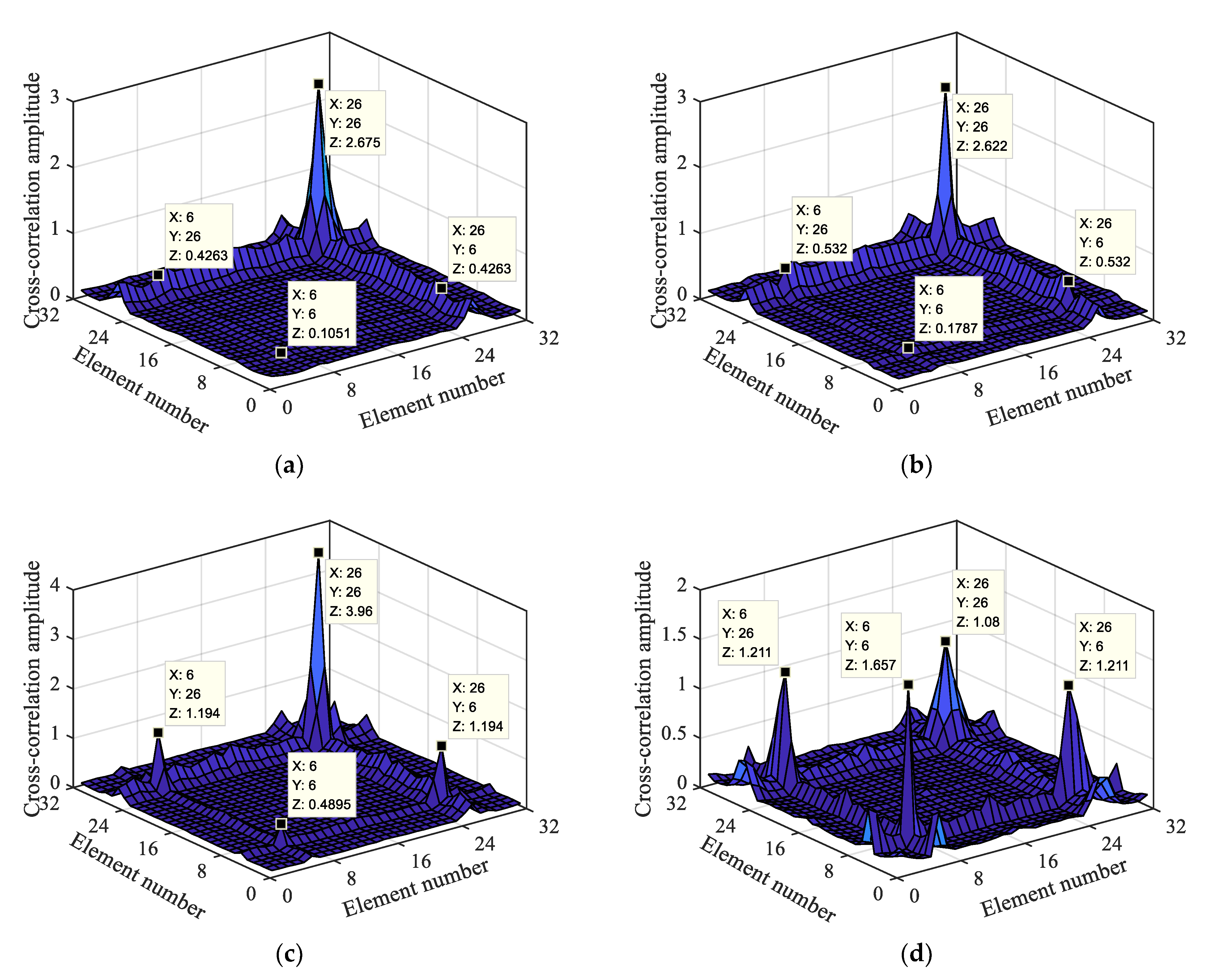
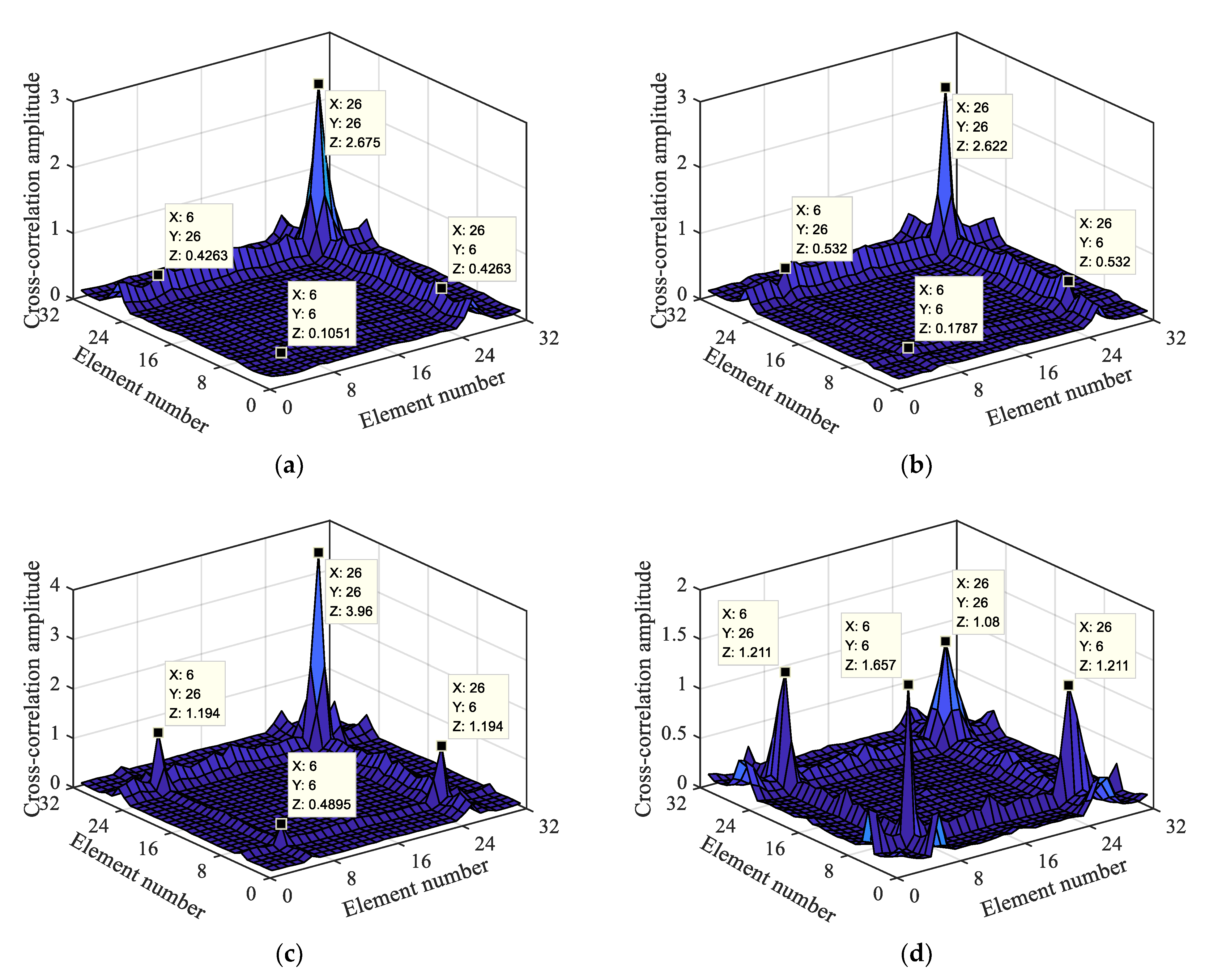
4.2.2. Analysis of the Influence of Multiple Damage Locations
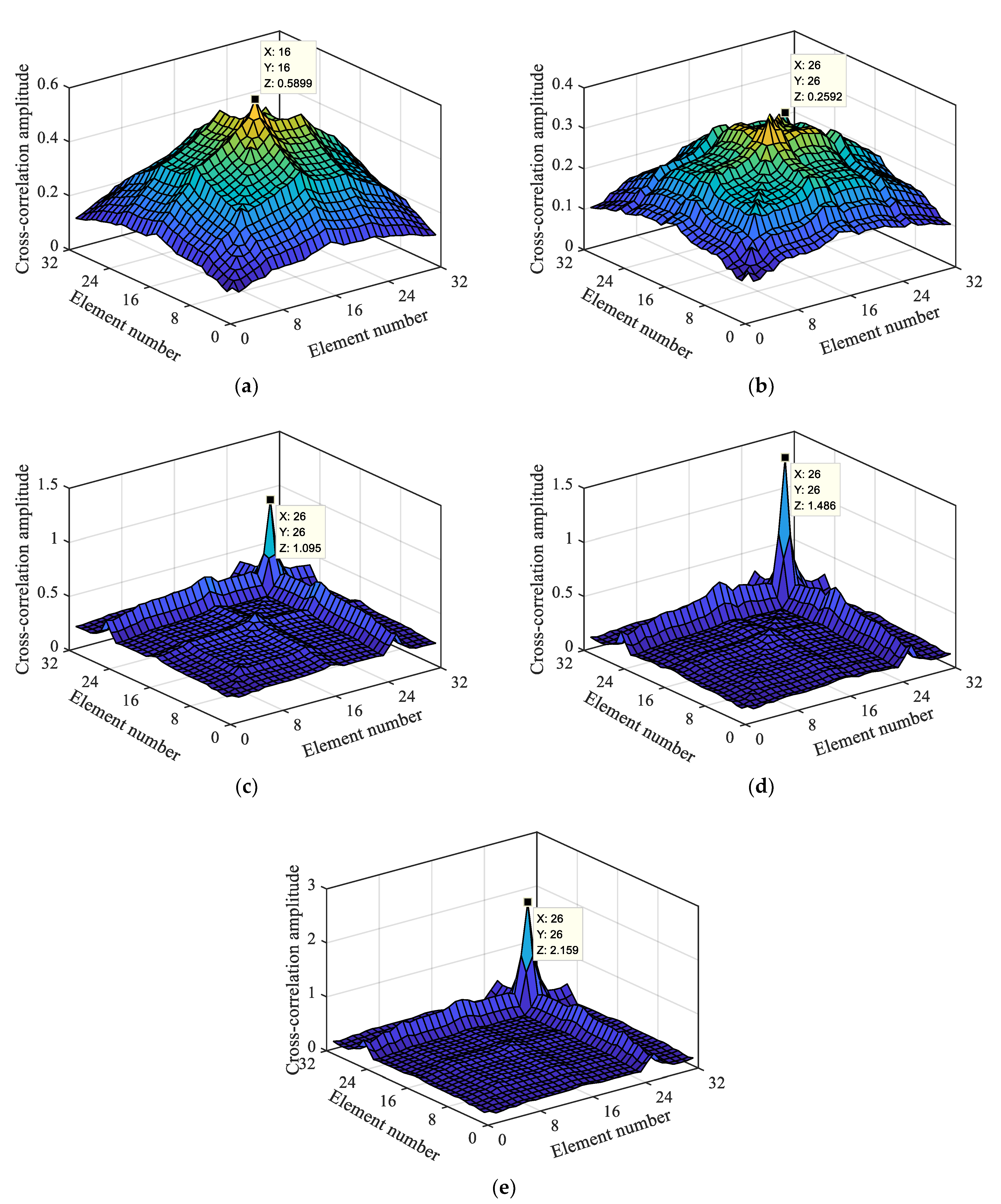
4.2.3. Analysis of the Influence of the Damage Degree
4.3. Experimental Error Analysis
- The pre-tensioning effect of the long-gauge FBG strain sensor is weakened: As the experiment progresses, the tensile effect is increasingly weakened. Moreover, the sensor attached to the upper roof measures the compressive strain. If the pre-tensioning effect is poor, it will significantly affect the accuracy of data collection.
- Influence of track irregularity: because of the lack of advanced processing technology, an irregularity exists in the upper roof track of the bridge. Consequently, wheel–rail collision can occur during the movement of the vehicle, producing an effect similar to percussion excitation and affecting the accuracy of strain data collection.
5. Conclusions and Prospects
- The damage location index proposed in this paper can effectively reduce the influence of noise and other factors and accurately identify the location of subtle damage, with high accuracy. This index is not only effective for single damage location identification, but also has a good identification effect for multiple damage locations. The proposed index can provide a good reference for solving the problem that the damage index based on macro-strain can not be applied to medium- and small-span bridges due to the obvious vehicle–bridge coupling effect.
- The proposed method in this paper has high requirements for bridge deck smoothness, moving vehicle speed and load size. The excitation caused by the collision between the wheel and the bridge deck will greatly affect the recognition effect, so it is necessary to maintain the smoothness of the bridge deck. The speed of the vehicle moving on the bridge deck is also required to be uniform, otherwise the recognition error will increase due to the excitation of variable speed. The larger the load value of the mobile vehicle is, the better the recognition effect of the damage index is. Therefore, for subtle damage, the positioning accuracy of the damage can be improved by increasing the mobile vehicle value.
- The vehicle–bridge model designed in this study is relatively simple and lacks in-depth study under complex mobile vehicle conditions (such as moving speed and axle number). Therefore, in future research, we will consider the use of a complex vehicle–bridge coupling model and prestressed concrete beams to further improve the proposed damage identification method. The damage identification method proposed in this paper is only verified under laboratory conditions and has achieved a good damage localization effect. However, in the bridge model experiment, the scale effect is a very important factor, and this paper does not consider the influence of scale effect on the damage identification method. In the later study, the author will conduct a comprehensive analysis of the actual bridge damage and laboratory verification, in order to further analyze the impact of scale effect on the proposed damage identification method.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zheng, J.J. Dynamic Response Analysis of Bridge under Moving Load. Master’s Thesis, Jilin Jianzhu University, Changchun, China, 2019. [Google Scholar]
- Yang, Q.W.; Peng, X. Sensitivity Analysis Using a Reduced Finite Element Model for Structural Damage Identification. Materials 2021, 14, 5514. [Google Scholar] [CrossRef] [PubMed]
- Han, W.; Wang, Y.P.; Wang, L. Application and Analysis of Two Nondestructive Testing Methods in Bridge Structure Damage Detection. J. Guiyang Univ. (Nat. Sci. Ed.) 2021, 16, 93–99. [Google Scholar] [CrossRef]
- Hong, W.; Cao, Y.; Wu, Z.S. Strain-based damage-assessment method for bridges under moving vehicular loads using long-gauge strain sensing. J. Bridge Eng. 2016, 21, 4016059. [Google Scholar] [CrossRef]
- Cao, P.; Yoo, D.; Shuai, Q.; Tang, J. Structural damage identification with multi-objective DIRECT algorithm using natural frequencies and single mode shape. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, Portland, OR, USA, 25–29 March 2017. [Google Scholar]
- Li, D.B. A general review on several fundamental points of experimental strain/stress modal analysis. Shock Vib. 1996, 15, 13–17. [Google Scholar]
- Wu, Z.S.; Zhang, J. Advanced Technology and Theory of Structural Health Monitoring, 1st ed.; Science Press: Beijing, China, 2015. [Google Scholar]
- Wu, Z.S.; Li, S.Z.; Adewuyi, A.P. Modal Analysis Based on Distributed Strain Measurements: Theory and Application. Sci. Technol. Rev. 2010, 28, 94–103. [Google Scholar]
- Li, S.Z.; Wu, Z.S. Development of Distributed Long-gage Fiber Optic Sensing System for Structural Health Monitoring. Struct. Health Monit. 2007, 6, 133–143. [Google Scholar] [CrossRef]
- Zhang, J.; Guo, S.; Wu, Z.; Zhang, Q. Structural identification and damage detection through long-gauge strain measurements. Eng. Struct. 2015, 99, 173–183. [Google Scholar] [CrossRef]
- Li, S.Z.; Wu, Z.S. Modal Analysis on Macro-strain Measurements from Distributed Long-gage Fiber Optic Sensors. J. Intell. Mater Syst. Struct. 2008, 19, 937–946. [Google Scholar]
- Li, S.Z. Structural Health Monitoring Strategy Based on Distributed Fiber Optic Sensing. Doctoral Dissertation, Ibaraki University, Mito, Japan, 2007. [Google Scholar]
- Hong, W.; Wu, Z.; Yang, C.; Wan, C.; Wu, G. Investigation on the damage identification of bridges using distributed long-gauge dynamic macrostrain response under ambient excitation. J. Intell. Mater Syst. Struct. 2012, 23, 85–103. [Google Scholar] [CrossRef]
- Xu, Z.D.; Zeng, X.; Li, S. Damage Detection Strategy Using Strain-Mode Residual Trends for Long-Span Bridges. J. Comput. Civ. Eng. 2013, 29, 04014064. [Google Scholar] [CrossRef]
- Xu, Z.D.; Li, S.; Zeng, X. Distributed Strain Damage Identification Technique for Long-Span Bridges Under Ambient Excitation. Int. J. Struct. Stab. Dyn. 2018, 18, 1850133. [Google Scholar] [CrossRef]
- Anastasopoulos, D.; De Smedt, M.; De Roeck, G.; Vandewalle, L.; Reynders, E. Modal strain identification using sub-microstrain FBG data from a pre-stressed concrete beam during progressive damage testing. Procedia Eng. 2017, 199, 1846–1851. [Google Scholar] [CrossRef]
- Li, S.; Xu, Z.D.; Wang, S.J.; Wu, Z.S. Modal macro-strain identification from operational macro-strain shape under changing loading conditions. J. Southeast Univ. (Engl. Ed.) 2016, 32, 219–225. [Google Scholar]
- Zhang, J.; Cheng, Y.Y.; Xia, Q.; Wu, Z.S. Change localization of a steel-stringer bridge through long-gauge strain measurements. J. Bridge Eng. 2015, 21, 4015057. [Google Scholar] [CrossRef]
- Wu, B.T.; Wu, G.; Yang, C.Q. Parametric study of a rapid bridge assessment method using distributed macro-strain influence envelope line. Mech. Syst. Signal Process. 2019, 120, 642–663. [Google Scholar] [CrossRef]
- Li, S. Macro-Strain Based Damage Identification Method for Municipal Highway Viaduct. Doctoral Dissertation, Southeast University, Nanjing, China, 2018. [Google Scholar]
- Razavi, M.; Hadidi, A. Structural damage identification through sensitivity-based finite element model updating and wavelet packet transform component energy. Structures 2021, 33, 4857–4870. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhu, X.Q.; Wang, H.L. Bridge damage identification based on wavelet packet transform under moving loads. J. Tianjin Cheng Jian Univ. 2019, 25, 94–97, 124. [Google Scholar]
- Yu, Z.; Xia, H. Bridge damage detection based on moving load induced structural response and wavelet analysis. J. Beijing Jiaotong Univ. 2014, 38, 55–61. [Google Scholar]
- Liu, X.J.; Wang, Z.F.; Zhang, S.X. On the damage identification method of simply-supported girder bridge based on vibration response correlation. J. Exp. Mech. 2019, 34, 29–37. [Google Scholar]
- Wu, B.; Wu, G.; Lu, H.; Feng, D.-C. Stiffness monitoring and damage assessment of bridges under moving vehicular loads using spatially-distributed optical fiber sensors. Smart Mater. Struct. 2017, 26, 035058. [Google Scholar] [CrossRef]
- Wu, B.; Wu, G.; Yang, C.; He, Y. Damage identification method for continuous girder bridges based on spatially-distributed long-gauge strain sensing under moving loads. Mech. Syst. Signal Process. 2018, 104, 415–435. [Google Scholar] [CrossRef]
- Chen, S.-Z.; Wu, G.; Feng, D.-C.; Zhang, L. Development of a Bridge Weigh-in-Motion System Based on Long-Gauge Fiber Bragg Grating Sensors. J. Bridge Eng. 2018, 23, 04018063.1–04018063.18. [Google Scholar] [CrossRef]
- Chen, Z.W.; Cai, Q.L.; Lei, Y.; Zhu, S.Y. Damage detection of long-span bridges using stress influence lines incorporated control charts. Sci. China Technol. Sci. 2014, 57, 1689–1697. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, Z.S. Impact Vibration Test and Rapid Evaluation of Bridges—Theory, Technology and Engineering Applications, 1st ed.; China Architecture & Building Press: Beijing, China, 2018. [Google Scholar]
- Wang, X.M. Structural Dynamic Analysis and Application with ANSYS, 1st ed.; China Communications Press: Beijing, China, 2014. [Google Scholar]
- Cheng, Y.Y. Research on Structural Health Monitoring Method Using Long-Gauge Optical Fiber Sensing Technology. Doctoral Dissertation, Southeast University, Nanjing, China, 2019. [Google Scholar]
- Zhang, X.J. The Applied Research Based on Wavelet Analysis in Dynamic Strain Healthy Indicator of Bridges. Master’s Thesis, Zhejiang University of Technology, Hangzhou, China, 2016. [Google Scholar]
- Xu, H.; Li, F.; Zhao, W.; Wang, S.; Du, Y.; Bian, C. A High Precision Fiber Bragg Grating Inclination Sensor for Slope Monitoring. J. Sens. 2019, 2019, 1354029. [Google Scholar] [CrossRef]
- Zhang, L.; Wu, G.; Li, H.L.; Chen, S.Z. Synchronous Identification of Damage and Vehicle Load on Simply Supported Bridges Based on Long-Gauge Fiber Bragg Grating Sensors. J. Perform. Constr. Fac. 2020, 34, 04019097. [Google Scholar] [CrossRef]
- Liu, G.Y.; Liu, X.J.; Zhang, S.X.; Wen, L.P. Damage Identification of Simply Supported Beam Bridge Based on Wavelet Analysis and Variation Coefficient. J. Appl. Mech. 2020, 37, 1915–1922, 2313–2314. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Damage Condition Number | Damage to the Element | Damage Width (cm) | Damage Degree (%) | |
|---|---|---|---|---|
| D0 | 0 | 0 | 0 | |
| D1 | 26 | 0.5 | Level 1 damage | |
| D2 | 26 | 0.5 | Level 2 damage | |
| D3 | 26 | 5 | Level 3 damage | |
| D4 | 26 | 5 | Level 4 damage | |
| D5 | 6, 26 | 5, 0.5 | Level 1 damage | Level 4 damage |
| D6 | 6, 26 | 5, 0.5 | Level 2 damage | Level 4 damage |
| D7 | 6, 26 | 5, 5 | Level 3 damage | Level 4 damage |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zhong, Z.; Duan, J.; Yang, J.; Zheng, Z.; Liu, G. Damage Identification Method for Medium- and Small-Span Bridges Based on Macro-Strain Data under Vehicle–Bridge Coupling. Materials 2022, 15, 1097. https://doi.org/10.3390/ma15031097
Zhang H, Zhong Z, Duan J, Yang J, Zheng Z, Liu G. Damage Identification Method for Medium- and Small-Span Bridges Based on Macro-Strain Data under Vehicle–Bridge Coupling. Materials. 2022; 15(3):1097. https://doi.org/10.3390/ma15031097
Chicago/Turabian StyleZhang, Hao, Zhixin Zhong, Junmiao Duan, Jianke Yang, Zhichao Zheng, and Guangxun Liu. 2022. "Damage Identification Method for Medium- and Small-Span Bridges Based on Macro-Strain Data under Vehicle–Bridge Coupling" Materials 15, no. 3: 1097. https://doi.org/10.3390/ma15031097
APA StyleZhang, H., Zhong, Z., Duan, J., Yang, J., Zheng, Z., & Liu, G. (2022). Damage Identification Method for Medium- and Small-Span Bridges Based on Macro-Strain Data under Vehicle–Bridge Coupling. Materials, 15(3), 1097. https://doi.org/10.3390/ma15031097