




Probabilistic Structural Model Updating with Modal Flexibility Using a Modified Firefly Algorithm


Abstract
1. Introduction
2. Model Updating Formulation
2.1. Modal Flexibility
2.2. Model Reduction
2.3. Bayesian Model Updating Based on Measured Modal Flexibility Data
3. Firefly Algorithm
3.1. Original Firefly Algorithm
- All the fireflies are unisex so they can attract each other without the influence of gender.
- The attractiveness is proportional to the brightness, and they both decrease as their distance increases.
- The brightness of a firefly is determined by the landscape of the objective function.
| Algorithm 1 the firefly algorithm |
| Initialize the parameters(α, β, γ, n) |
| Initialize randomly a population of n fireflies |
| Evaluate the fitness of the initial population at xi by objective function |
| While (k < MaxGen) do |
| For i =1:n |
| For j = 1:n |
| If Firefly j is better than i |
| Firefly i moves towards j |
| End if |
| End for |
| Evaluate the new solution |
| End for |
| Rank and update the best solution found so far |
| Update iteration counter k; |
| Update α |
| End while |
3.2. Modified Nelder–Mead Firefly Algorithm
3.2.1. Modification in Parameters α and β
3.2.2. Boundary Constrain Mechanism
| Algorithm 2 boundary constrain mechanism |
| For i = 1:n |
| For j = 1:D |
| If or |
| Then |
| End if |
| End for |
| xi = xi + F*(xbest − xi) |
| End for |
3.2.3. Hybrid of Nelder–Mead Algorithm and the Diverse Threshold
4. Numerical Illustrative Examples
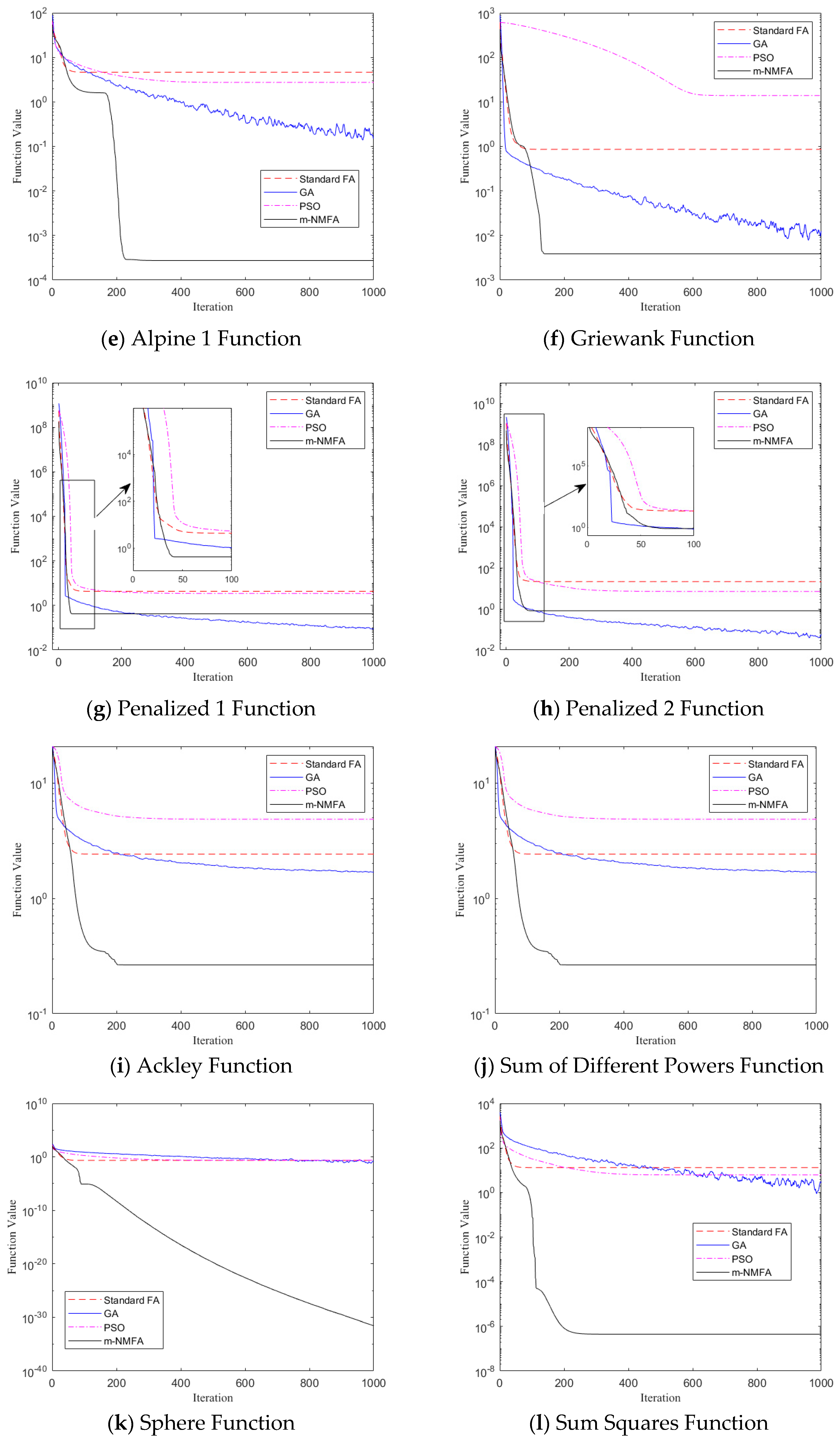
4.1. Benchmark Work of m-NMFA
4.2. Numerical Simulation of Shear Frame
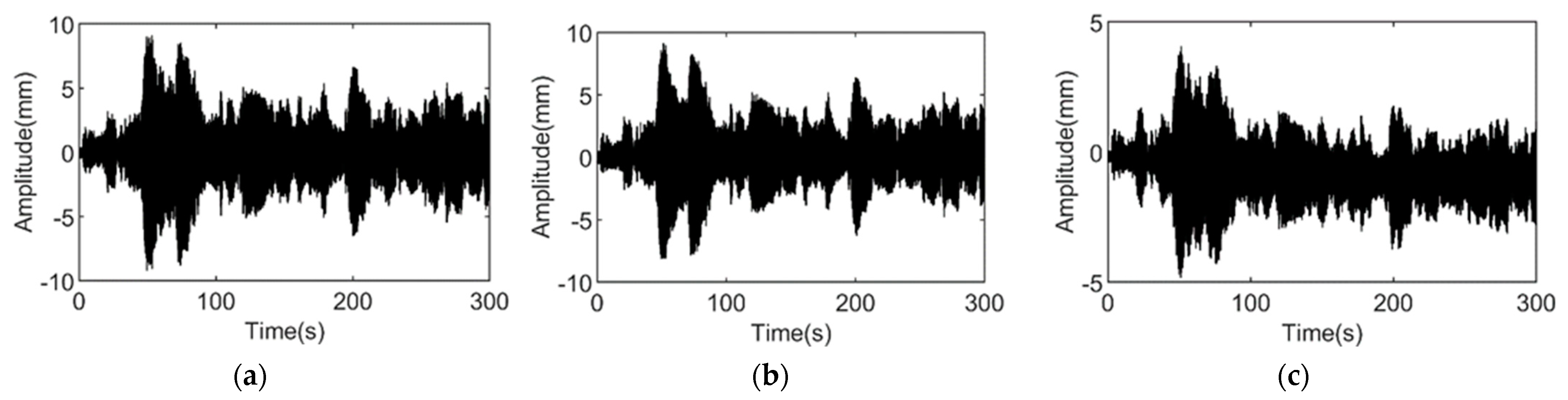
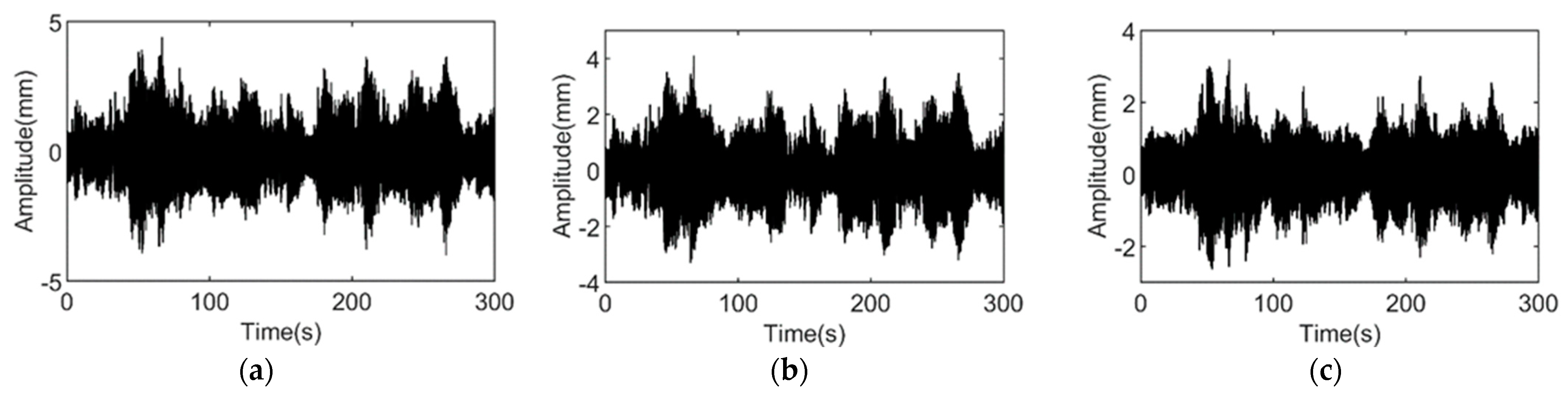
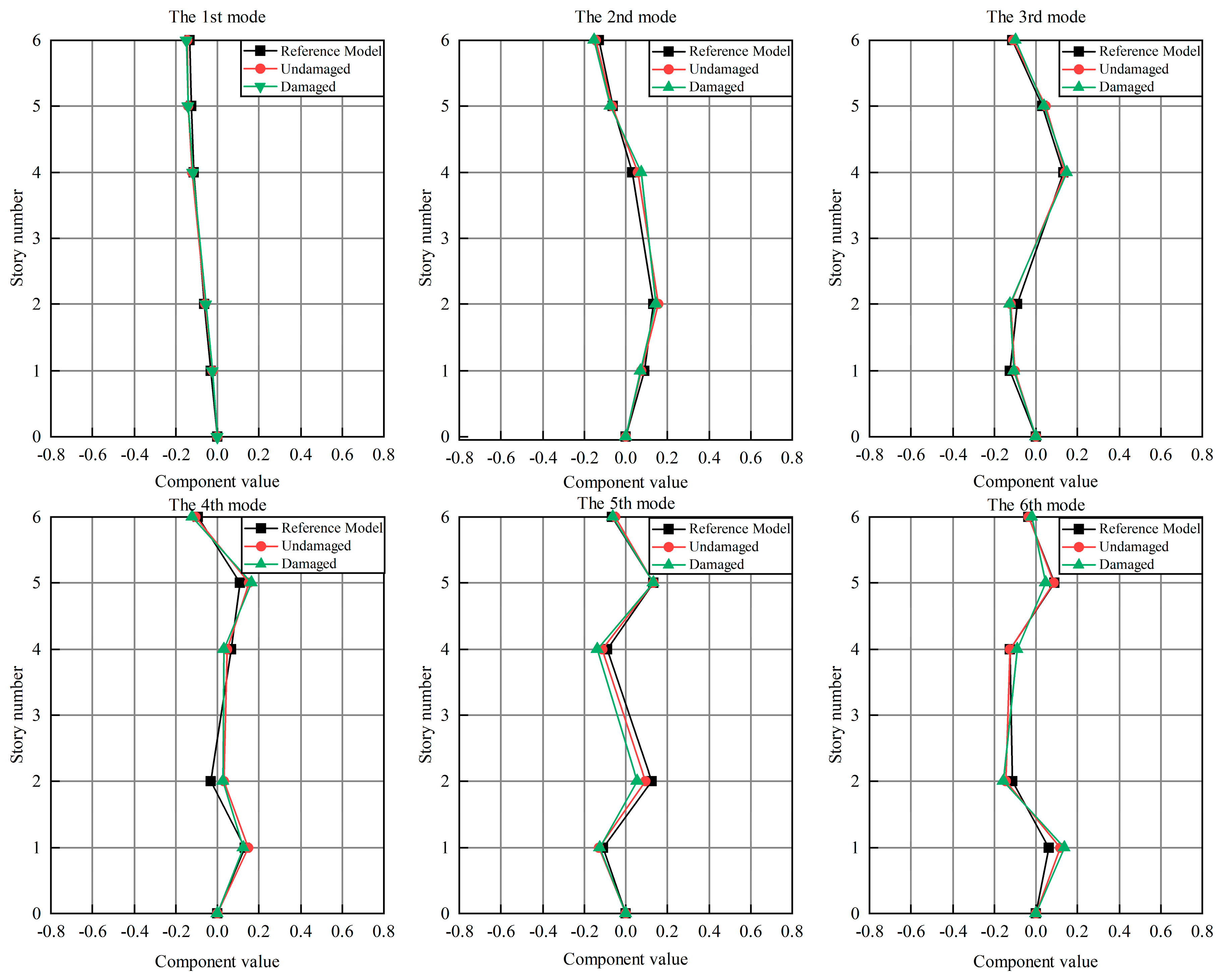
5. Experimental Illustrative Example
6. Conclusions
- In the research on the random step size formula, it is found that the smaller the random step size is at the beginning of the iteration, the faster the convergence speed of the algorithm will be. However, as the random step size gradually approaches zero at the end of the iteration, its value should be large enough to keep the algorithm with sufficient exploration ability.
- In the research on the value of diversity threshold, a fraction is used to quantify the diversity of the population to enable the NMA algorithm to start at an appropriate time. The diversity threshold is quantized into a value between (0, e−1] through exponential form. When the diversity threshold is taken to be between 10−3~10−5, the algorithm can obtain a more accurate optimal solution.
- The selection of the iterative formula of the attraction parameter has great impact on the solving ability of the FA in solving the multi-dimensional optimization problems, The selection of the iterative formula of the attraction parameter has a great impact on the ability of the FA in solving multi-dimensional optimization problems, which would lead to stagnation and non-convergence if an improper formula were selected. This paper avoids such problem by selecting an appropriate formula for the coefficient of attraction.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Modified Algorithm with No NMA | T = 10−1 | T = 10−3 | T = 10−5 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean | SD | Max | Min | Mean | SD | Max | Min | Mean | SD | Max | Min | Mean | SD | Max | Min | |
| −2.063 | 2.68 × 10−15 | −2.063 | −2.063 | −2.063 | 2.68 × 10−15 | −2.063 | −2.063 | −2.063 | 2.68 × 10−15 | −2.063 | −2.063 | −2.063 | 2.68 × 10−15 | −2.063 | −2.063 | |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| −3.022 | 0.032 | −2.942 | −3.042 | −3.025 | 0.028 | −2.981 | −3.042 | −3.012 | 0.031 | −2.981 | −3.042 | −3.021 | 0.029 | −2.981 | −3.042 | |
| 73.192 | 28.043 | 145.588 | 19.536 | 2.90 × 10−6 | 2.12 × 10−6 | 1.30 × 10−5 | 4.38 × 10−7 | 2.61 × 10−6 | 2.25 × 10−6 | 1.48 × 10−5 | 3.05 × 10−7 | 2.71 × 10−6 | 1.99 × 10−6 | 8.48 × 10−6 | 1.95 × 10−7 | |
| 1.703 | 1.369 | 7.756 | 0.033 | 2.39 × 10−4 | 1.49 × 10−4 | 7.06 × 10−4 | 1.67 × 10−5 | 2.13 × 10−4 | 1.39 × 10−4 | 6.57 × 10−4 | 7.92 × 10−6 | 2.71 × 10−4 | 1.74 × 10−4 | 7.94 × 10−4 | 2.14 × 10−5 | |
| 4.91 × 10−3 | 6.50 × 10−3 | 0.028 | 3.77 × 10−6 | 0.032 | 0.064 | 0.460 | 1.16 × 10−13 | 0.035 | 0.034 | 0.162 | 6.91 × 10−13 | 3.89 × 10−3 | 7.00 × 10−3 | 0.044 | 1.32 × 10−13 | |
| 0.957 | 1.102 | 7.171 | 4.62 × 10−4 | 3.727 | 5.407 | 26.387 | 8.15 × 10−15 | 1.650 | 3.082 | 22.824 | 9.36 × 10−15 | 0.423 | 0.621 | 3.720 | 1.05 × 10−15 | |
| 0.155 | 1.251 | 12.226 | 2.03 × 10−5 | 26.232 | 35.036 | 100.531 | 5.94 × 10−16 | 2.743 | 9.077 | 55.762 | 6.46 × 10−14 | 0.808 | 4.779 | 45.357 | 9.50 × 10−15 | |
| 0.262 | 0.448 | 1.900 | 7.99 × 10−15 | 3.955 | 1.580 | 17.586 | 2.317 | 0.240 | 0.483 | 1.900 | 4.44 × 10−15 | 0.265 | 0.502 | 1.778 | 4.44 × 10−15 | |
| 2.90 × 10−6 | 2.60 × 10−6 | 1.69 × 10−5 | 2.55 × 10−7 | 8.93 × 10−78 | 3.94 × 10−77 | 3.64 × 10−76 | 1.74 × 10−84 | 2.20 × 10−71 | 2.20 × 10−70 | 2.20 × 10−69 | 7.04 × 10−84 | 3.68 × 10−72 | 3.68 × 10−71 | 3.68 × 10−70 | 5.99 × 10−83 | |
| 2.96 × 10−8 | 1.64 × 10−7 | 1.17 × 10−6 | 1.39 × 10−32 | 7.52 × 10−15 | 7.52 × 10−14 | 7.52 × 10−13 | 1.72 × 10−32 | 2.89 × 10−32 | 7.39 × 10−33 | 4.76 × 10−32 | 1.65 × 10−32 | 1.84 × 10−15 | 1.84 × 10−14 | 1.84 × 10−13 | 1.56 × 10−32 | |
| 1.558 | 1.552 | 6.694 | 0.044 | 3.62 × 10−7 | 4.53 × 10−7 | 2.13 × 10−6 | 1.85 × 10−9 | 3.80 × 10−7 | 4.71 × 10−7 | 2.56 × 10−6 | 1.19 × 10−9 | 3.36 × 10−7 | 4.60 × 10−7 | 2.73 × 10−6 | 9.01 × 10−10 | |
| 29.276 | 7.036 | 77.985 | 22.668 | 0.997 | 1.735 | 3.987 | 4.51 × 10−13 | 0.797 | 1.603 | 3.987 | 1.81 × 10−12 | 0.678 | 1.505 | 3.987 | 5.81 × 10−12 | |
| 8.061 | 9.410 | 65.806 | 0.681 | 0.667 | 2.04 × 10−7 | 0.667 | 0.667 | 0.667 | 0 | 0.667 | 0.667 | 0.667 | 6.21 × 10−8 | 0.667 | 0.667 | |
| 118.714 | 131.326 | 674.149 | 0.563 | 3.09 × 10−7 | 3.91 × 10−7 | 1.82 × 10−6 | 5.69 × 10−10 | 3.12 × 10−7 | 4.06 × 10−7 | 2.05 × 10−6 | 1.35 × 10−10 | 2.95 × 10−7 | 4.39 × 10−7 | 2.48 × 10−6 | 2.02 × 10−10 | |
| 1.74 × 1026 | 1.04 × 1027 | 8.19 × 1027 | 8.19 × 1027 | 209.091 | 326.701 | 1.42 × 103 | 2.53 × 10−8 | 135.316 | 229.458 | 1.50 × 103 | 2.71 × 10−7 | 187.578 | 296.558 | 1.42 × 103 | 9.43 × 10−8 | |
| 2.41 × 104 | 1.58 × 104 | 8.91 × 104 | 4.35 × 103 | 6.13 × 10−4 | 4.51 × 10−4 | 2.48 × 10−3 | 7.10 × 10−5 | 7.22 × 10−4 | 6.88 × 10−4 | 5.09 × 10−3 | 1.08 × 10−4 | 6.11 × 10−4 | 3.91 × 10−4 | 1.99 × 10−3 | 1.32 × 10−4 | |
| 2.444 | 2.584 | 16.389 | 0.041 | 1.68 × 10−3 | 1.18 × 10−3 | 5.81 × 10−3 | 7.15 × 10−6 | 1.70 × 10−3 | 1.16 × 10−3 | 5.61 × 10−3 | 7.39 × 10−5 | 1.73 × 10−3 | 1.09 × 10−3 | 6.50 × 10−3 | 2.66 × 10−5 | |
| No. | FA | GA | PSO | m-NMFA | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean | SD | Max | Min | Mean | SD | Max | Min | Mean | SD | Max | Min | Mean | SD | Max | Min | |
| −2.0626 | 2.65 × 10−15 | −2.0626 | −2.0626 | −2.0626 | 1.01 × 10−10 | −2.0626 | −2.0626 | −2.0626 | 2.68 × 10−15 | −2.0626 | −2.0626 | −2.0626 | 2.68 × 10−15 | −2.0626 | −2.0626 | |
| 3.53 × 10−5 | 3.26 × 10−4 | 3.25 × 10−3 | 0.00 × 100 | 0.046 | 0.0982 | 0.475 | 2.95 × 10−14 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| −3.0197 | 0.0366 | −2.9233 | −3.0425 | −3.0179 | 0.0303 | −2.9799 | −3.0425 | −2.9622 | 0.0871 | −2.6175 | −3.0425 | −3.0210 | 0.0295 | −2.9810 | −3.0425 | |
| 193.2893 | 48.4340 | 328.8250 | 91.7273 | 61.9113 | 71.3777 | 318.4053 | 1.5917 | 76.3396 | 77.5750 | 528.4291 | 1.1334 | 2.71 × 10−6 | 1.99 × 10−6 | 8.48 × 10−6 | 1.95 × 10−7 | |
| 4.7192 | 2.4243 | 12.9291 | 0.9156 | 0.1317 | 0.2206 | 1.7274 | 3.80 × 10−3 | 3.2038 | 1.9981 | 11.9646 | 0.5124 | 2.71 × 10−4 | 1.74 × 10−4 | 7.94 × 10−4 | 2.14 × 10−5 | |
| 0.8609 | 0.4527 | 2.8608 | 0.0800 | 4.13 × 10−3 | 9.34 × 10−3 | 0.0620 | 4.08 × 10−5 | 13.8875 | 4.8491 | 30.1011 | 4.08 × 10−5 | 3.89 × 10−3 | 7.00 × 10−3 | 0.0443 | 1.32 × 10−13 | |
| 4.3163 | 2.2529 | 12.2211 | 0.4024 | 0.0667 | 0.0862 | 0.3263 | 4.56 × 10−5 | 3.4507 | 1.1366 | 7.0231 | 4.56 × 10−5 | 0.4225 | 0.6215 | 3.7198 | 1.05 × 10−15 | |
| 21.3056 | 16.1388 | 122.1799 | 1.0126 | 0.0259 | 0.0344 | 0.2279 | 2.73 × 10−4 | 7.0522 | 10.4476 | 49.7862 | 2.73 × 10−4 | 0.8075 | 4.7795 | 45.3568 | 9.50 × 10−15 | |
| 2.4178 | 0.9188 | 4.9678 | 0.6201 | 1.6640 | 0.5075 | 2.9591 | 9.45 × 10−2 | 4.8442 | 1.2063 | 7.6330 | 0.0945 | 0.2651 | 0.5021 | 1.7780 | 4.44 × 10−15 | |
| 1.94 × 10−5 | 3.23 × 10−5 | 2.21 × 10−4 | 1.14 × 10−6 | 6.81 × 10−4 | 2.05 × 10−3 | 0.0159 | 7.55 × 10−8 | 4.98 × 10−6 | 1.51 × 10−5 | 1.08 × 10−4 | 0 | 3.68 × 10−72 | 3.68 × 10−71 | 3.68 × 10−70 | 5.99 × 10−83 | |
| 0.2330 | 0.1597 | 0.8486 | 0.0507 | 0.0193 | 0.0219 | 0.1432 | 8.46 × 10−4 | 0.2220 | 0.1488 | 0.8418 | 0.0385 | 1.84 × 10−15 | 1.84 × 10−14 | 1.84 × 10−13 | 1.56 × 10−32 | |
| 15.7275 | 10.1891 | 50.2489 | 1.5753 | 0.5308 | 0.6093 | 3.2460 | 0.0150 | 7.0292 | 4.2909 | 25.7904 | 0.3848 | 3.36 × 10−7 | 4.60 × 10−7 | 2.73 × 10−6 | 9.01 × 10−10 | |
| 73.6154 | 26.5540 | 148.5464 | 31.3071 | 38.1670 | 40.1835 | 135.4710 | 0.2690 | 70.8902 | 50.9525 | 496.6682 | 30.3306 | 0.6777 | 1.5051 | 3.9866 | 5.81 × 10−12 | |
| 86.3426 | 153.5819 | 1.46 × 103 | 6.6724 | 6.7756 | 5.5898 | 33.0558 | 0.3401 | 18.2969 | 19.1600 | 125.8380 | 2.8606 | 0.6667 | 6.21 × 10−8 | 0.6667 | 0.6667 | |
| 1.60 × 103 | 1.35 × 103 | 7.49 × 103 | 80.0058 | 0.6165 | 0.8272 | 4.9430 | 0.0178 | 106.0857 | 99.0572 | 678.9951 | 9.3399 | 2.95 × 10−7 | 4.39 × 10−7 | 2.48 × 10−6 | 2.02 × 10−10 | |
| 2.04 × 1051 | 1.96 × 1052 | 1.96 × 1053 | 3.12 × 1012 | 8.54 × 1011 | 7.48 × 1012 | 7.40 × 1013 | 1.69 × 10−3 | 3.37 × 1025 | 2.51 × 1026 | 2.38 × 1027 | 1.92 × 103 | 187.5780 | 296.5578 | 1.42 × 103 | 9.43 × 10−8 | |
| 7.361 × 104 | 5.340 × 104 | 2.837 × 105 | 1.429 × 104 | 180.9207 | 674.6373 | 6.31 × 103 | 9.3670 | 6.02 × 103 | 3.85 × 103 | 2.44 × 104 | 961.8477 | 6.11 × 10−4 | 3.91 × 10−4 | 1.99 × 10−3 | 1.32 × 10−4 | |
| 19.3688 | 12.8955 | 103.0825 | 3.6407 | 2.8971 | 1.2763 | 7.2355 | 0.2871 | 6.4787 | 3.0430 | 18.5810 | 2.2303 | 1.73 × 10−3 | 1.09 × 10−3 | 6.50 × 10−3 | 2.66 × 10−5 | |
References
- Qin, C.A. Fast Bayesian Approach for Modal Parameter Identification and Model Updating of Bridge Engineering. Master’s Thesis, Hefei University of Technology, Hefei, China, 2020. [Google Scholar]
- Mottershead, J.E.; Link, M.; Friswell, M.I. The Sensitivity Method in Finite Element Model Updating: A Tutorial. Mech. Syst. Signal Process. 2011, 25, 2275–2296. [Google Scholar] [CrossRef]
- Shinozuka, M. Probabilistic Modeling of Concrete Structures. J. Eng. Mech. Div. 1972, 98, 1433–1451. [Google Scholar] [CrossRef]
- Collins, J.D.; Hart, G.C.; Hasselman, T.K.; Kennedy, B. Statistical Identification of Structures. Aiaa J. 1974, 12, 185–190. [Google Scholar] [CrossRef]
- Beck, J.L.; Katafygiotis, L.S. Updating Models and Their Uncertainties. I: Bayesian Statistical Framework. J. Eng. Mech. 1998, 124, 455–461. [Google Scholar] [CrossRef]
- Katafygiotis, L.S.; Beck, J.L. Updating Models and Their Uncertainties. II: Model Identifiability. J. Eng. Mech. 1998, 124, 463–467. [Google Scholar] [CrossRef]
- Yuen, K.-V.; Beck, J.L.; Katafygiotis, L.S. Efficient Model Updating and Health Monitoring Methodology Using Incomplete Modal Data without Mode Matching. Struct. Control Health Monit. 2006, 13, 91–107. [Google Scholar] [CrossRef]
- Katafygiotis, L.S.; Papadimitriou, C.; Lam, H.-F. A Probabilistic Approach to Structural Model Updating. Soil Dyn. Earthq. Eng. 1998, 17, 495–507. [Google Scholar] [CrossRef]
- Yan, W.-J.; Katafygiotis, L.S. A Novel Bayesian Approach for Structural Model Updating Utilizing Statistical Modal Information from Multiple Setups. Struct. Saf. 2015, 52, 260–271. [Google Scholar] [CrossRef]
- Ching, J.; Beck, J.L. New Bayesian Model Updating Algorithm Applied to A Structural Health Monitoring Benchmark. Struct. Health Monit. 2004, 3, 313–332. [Google Scholar] [CrossRef]
- Feng, Z.Q.; Katafygiotis, L.S. Bayesian Model Updating Based on Modal Flexibility for Structural Health Monitoring. In Proceedings of the 9th International Conference on Structural Dynamics, Porto, Portugal, 30 June–2 July 2014; pp. 177–184, ISBN 978-972-752-165-4. [Google Scholar]
- Li, X.; Tan, J.; Zheng, K.; Zhang, L.; Zhang, L.; He, W.; Huang, P.; Li, H.; Zhang, B.; Chen, Q.; et al. Enhanced Photon Communication through Bayesian Estimation with an Snspd Array. Photon. Res. 2020, 8, 637. [Google Scholar] [CrossRef]
- Feng, Z.; Lin, Y. Flutter Derivatives Identification and Uncertainty Quantification for Bridge Decks Based on the Artificial Bee Colony Algorithm and Bootstrap Technique. Appl. Sci. 2021, 11, 11376. [Google Scholar] [CrossRef]
- Feng, Z.; Ye, Z.; Wang, W.; Lin, Y.; Chen, Z.; Hua, X. Structural Model Identification Using a Modified Electromagnetism-Like Mechanism Algorithm. Sensors 2020, 20, 4789. [Google Scholar] [CrossRef]
- Fraser, A. Simulation of Genetic Systems by Automatic Digital Computers Ii. Effects of Linkage on Rates of Advance Under Selection. Aust. J. Biol. Sci. 1957, 10, 492. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant System: Optimization by A Colony of Cooperating Agents. IEEE Trans. Syst. Man Cybern. B 1996, 26, 29–41. [Google Scholar] [CrossRef]
- Yang, X.S. Nature-Inspired Metaheuristic Algorithms, 2nd ed.; Luniver Press: England, UK, 2010. [Google Scholar]
- Berman, A.; Flannelly, W.G. Theory of Incomplete Models of Dynamic Structures. Aiaa J. 1971, 9, 1481–1487. [Google Scholar] [CrossRef]
- Feng, Z.; Lin, Y.; Wang, W.; Hua, X.; Chen, Z. Probabilistic Updating of Structural Models for Damage Assessment Using Approximate Bayesian Computation. Sensors 2020, 20, 3197. [Google Scholar] [CrossRef] [PubMed]
- O’callahan, J. System Equivalent Reduction and Expansion Process; Society of Experimental Mechanics: Bethel, CT, USA, 1989; Volume 7, pp. 29–37. [Google Scholar]
- Lal, H.P.; Jith, J.; Gupta, S.; Sarkar, S. Reduced Order Modelling in Stochastically Parametered Acousto-Elastic System Using Arbitrary Pce Based Serep. Probabilistic Eng. Mech. 2018, 52, 1–14. [Google Scholar] [CrossRef]
- Bansal, S. A New Gibbs Sampling Based Bayesian Model Updating Approach Using Modal Data from Multiple Setups. Int. J. Uncertain. Quantif. 2015, 5, 361–374. [Google Scholar] [CrossRef]
- Jang, J.; Smyth, A. Bayesian Model Updating of a Full-Scale Finite Element Model With Sensitivity-Based Clustering. Struct. Control. Health Monit. 2017, 24, 1–15. [Google Scholar] [CrossRef]
- Yang, X.-S. Firefly Algorithm, Lévy Flights and Global Optimization. In Research and Development in Intelligent Systems Xxvi; Bramer, M., Ellis, R., Petridis, M., Eds.; Springer: London, UK, 2010; pp. 209–218. ISBN 978-1-84882-982-4. [Google Scholar]
- Yu, S.; Su, S.; Lu, Q.; Huang, L. A Novel Wise Step Strategy for Firefly Algorithm. Int. J. Comput. Math. 2014, 91, 2507–2513. [Google Scholar] [CrossRef]
- Wang, H.; Zhou, X.; Sun, H.; Yu, X.; Zhao, J.; Zhang, H.; Cui, L. Firefly Algorithm with Adaptive Control Parameters. Soft Comput. 2017, 21, 5091–5102. [Google Scholar] [CrossRef]
- Brajević, I.; Ignjatović, J. An Upgraded Firefly Algorithm With Feasibility-Based Rules for Constrained Engineering Optimization Problems. J. Intell. Manuf. 2019, 30, 2545–2574. [Google Scholar] [CrossRef]
- Yang, X.-S.; He, X.-S. Why the Firefly Algorithm Works? In Nature-Inspired Algorithms and Applied Optimization; Yang, X.-S., Ed.; Studies In Computational Intelligence; Springer International Publishing: Cham, Switzerland, 2018; Volume 744, pp. 245–259. ISBN 978-3-319-67668-5. [Google Scholar]
- Yu, S.; Yang, S.; Su, S. Self-Adaptive Step Firefly Algorithm. J. Appl. Math. 2013, 2013, 1–8. [Google Scholar] [CrossRef]
- Manoharan, G.V.; Shanmugalakshmi, R. Multi-Objective Firefly Algorithm for Multi-Class Gene Selection. Indian J. Sci. Technol. 2015, 8, 27. [Google Scholar] [CrossRef][Green Version]
- Wang, C.; Chu, X. An Improved Firefly Algorithm with Specific Probability and Its Engineering Application. IEEE Access 2019, 7, 57424–57439. [Google Scholar] [CrossRef]
- Shakarami, M.R.; Sedaghati, R. A New Approach for Network Reconfiguration Problem in Order to Deviation Bus Voltage Minimization with Regard to Probabilistic Load Model and Dgs. Eng. Technol. Int. J. Electr. Comput. Eng. 2014, 8, 430–435. [Google Scholar]
- Selvarasu, R.; Surya Kalavathi, M.; Asir Rajan, C.C. Svc Placement for Voltage Constrained Loss Minimization Using Self-Adaptive Firefly Algorithm. Arch. Electr. Eng. 2013, 62, 649–661. [Google Scholar] [CrossRef]
- Yang, X.S.; He, X. Firefly Algorithm: Recent Advances and Applications. IJSI 2013, 1, 36. [Google Scholar] [CrossRef]
- Rizk-Allah, R.M.; Zaki, E.M.; El-Sawy, A.A. Hybridizing Ant Colony Optimization with Firefly Algorithm for Unconstrained Optimization Problems. Appl. Math. Comput. 2013, 224, 473–483. [Google Scholar] [CrossRef]
- Yelghi, A.; Köse, C. A Modified Firefly Algorithm for Global Minimum Optimization. Appl. Soft Comput. 2018, 62, 29–44. [Google Scholar] [CrossRef]
- Brajevic, I.; Ignjatovi, J. An Enhanced Firefly Algorithm for Mixed Variable. Facta Univ. Ser. Math. Inform. 2015, 30, 401–417. [Google Scholar]
- Rajan, A.; Malakar, T. Optimal Reactive Power Dispatch Using Hybrid Nelder–Mead Simplex Based Firefly Algorithm. Int. J. Electr. Power Energy Syst. 2015, 66, 9–24. [Google Scholar] [CrossRef]
- Ren, Y.; Zhang, L.; Wang, W.; Wang, X.; Lei, Y.; Xue, Y.; Sun, X.; Zhang, W. Genetic-Algorithm-Based Deep Neural Networks for Highly Efficient Photonic Device Design. Photon. Res. 2021, 9, B247. [Google Scholar] [CrossRef]
- He, W.; Tong, M.; Xu, Z.; Hu, Y.; Cheng, X.; Jiang, T. Ultrafast All-Optical Terahertz Modulation Based on an Inverse-Designed Metasurface. Photon. Res. 2021, 9, 1099. [Google Scholar] [CrossRef]
- Jamil, M.; Yang, X.S. A Literature Survey of Benchmark Functions for Global Optimisation Problems. IJMMNO 2013, 4, 150. [Google Scholar] [CrossRef]
- Brajević, I.; Stanimirović, P. An Improved Chaotic Firefly Algorithm for Global Numerical Optimization. IJCIS 2018, 12, 131. [Google Scholar] [CrossRef]












| No. | Function Names | Formulations | Limits | Min | D |
|---|---|---|---|---|---|
| Cross-in-Tray Function | xi∈[−10,10] | −2.0626 | 2 | ||
| Schaffer N2 Function | xi∈[−100,100] | 0 | 2 | ||
| Hartmann 6-D Function | , where A P | xi∈(0,1) | −3.3224 | 6 | |
| Zakharov Function | xi∈[−5,10] | 0 | 30 | ||
| Alpine Function | xi∈[−10,10] | 0 | 30 | ||
| Griewank Function | xi∈[−600,600] | 0 | 30 | ||
| Penalized 1 Function | where | xi∈[−50,50] | 0 | 30 | |
| Penalized 2 Function | xi∈[−50,50] | 0 | 30 | ||
| Ackley Function | xi∈[−32.768,32.768] | 0 | 30 | ||
| Sum of Different Powers Function | xi∈[−1,1] | 0 | 30 | ||
| Sphere Function | xi∈[−5.12,5.12] | 0 | 30 | ||
| Sum Squares Function | xi∈[−5.12,5.12] | 0 | 30 | ||
| Rosenbrock Function | xi∈[−2.048,2.048] | 0 | 30 | ||
| Dixon-Price Function | xi∈[−10,10] | 0 | 30 | ||
| Rotated Hyper-Ellipsoid Function | xi∈[−65.536, 65.536] | 0 | 30 | ||
| Perm Function 0, d, β | xi∈[−30,30] | 0 | 30 | ||
| Schwefel 1.2 Function | xi∈[−100,100] | 0 | 30 | ||
| Schwef 2.22 Function | xi∈[−100,100] | 0 | 30 |
| No. | θa | FA | GA | PSO | m-NMFA | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| θ | SD | CV | θ | SD | CV | θ | SD | CV | θ | SD | CV | ||
| 1 | 0 | 0.026 | 0.0012 | 0.0452 | 0.0083 | 0.0011 | 0.1374 | −0.0030 | 0.0020 | 0.6884 | 0.0081 | 0.0011 | 0.1408 |
| 2 | 0 | 0.007 | 0.0016 | 0.2196 | −0.0053 | 0.0015 | 0.2858 | −0.0104 | 0.0029 | 0.2772 | −0.0054 | 0.0015 | 0.2785 |
| 3 | 0 | 0.032 | 0.0014 | 0.0452 | −0.0044 | 0.0013 | 0.2932 | 0.0004 | 0.0042 | 9.3279 | −0.0047 | 0.0013 | 0.2729 |
| 4 | 0 | 0.042 | 0.0015 | 0.0350 | 0.0061 | 0.0013 | 0.2196 | 0.0414 | 0.0043 | 0.1042 | 0.0058 | 0.0013 | 0.2291 |
| 5 | −0.2 | −0.185 | 0.0012 | 0.0065 | −0.1932 | 0.0012 | 0.0060 | −0.2016 | 0.0024 | 0.0121 | −0.1933 | 0.0012 | 0.0060 |
| 6 | −0.4 | −0.404 | 0.0008 | 0.0019 | −0.4036 | 0.0008 | 0.0019 | −0.4124 | 0.0015 | 0.0036 | −0.4036 | 0.0008 | 0.0019 |
| 7 | −0.2 | −0.205 | 0.0012 | 0.0058 | −0.1992 | 0.0012 | 0.0061 | −0.2025 | 0.0026 | 0.0127 | −0.1993 | 0.0012 | 0.0061 |
| 8 | 0 | 0.028 | 0.0015 | 0.0553 | −0.0058 | 0.0014 | 0.2402 | −0.0063 | 0.0027 | 0.4338 | −0.0061 | 0.0014 | 0.2299 |
| 9 | 0 | 0.032 | 0.0013 | 0.0416 | −0.0030 | 0.0012 | 0.3932 | −0.0235 | 0.0030 | 0.1271 | −0.0031 | 0.0012 | 0.3779 |
| 10 | 0 | 0.046 | 0.0021 | 0.0452 | −0.0060 | 0.0017 | 0.2859 | −0.0019 | 0.0030 | 1.5957 | −0.0062 | 0.0017 | 0.2760 |
| 11 | 0 | 0.015 | 0.0015 | 0.0943 | −0.0079 | 0.0014 | 0.1722 | 0.0127 | 0.0040 | 0.3176 | −0.0080 | 0.0014 | 0.1688 |
| 12 | 0 | −0.001 | 0.0024 | 2.7776 | −0.0121 | 0.0022 | 0.1850 | 0.0621 | 0.0065 | 0.1043 | −0.0120 | 0.0022 | 0.1868 |
| No. | θa | FA | GA | PSO | m-NMFA | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| θ | SD | CV | θ | SD | CV | θ | SD | CV | θ | SD | CV | ||
| 1 | 0 | 0.017 | 0.0024 | 0.0293 | 0.0045 | 0.0020 | 0.0459 | 0.0613 | / | 1.2185 | −0.0026 | 0.0020 | 0.7461 |
| 2 | 0 | 0.0473 | 0.0015 | 0.0368 | 0.0383 | 0.0077 | 0.0150 | 0.1942 | / | 0.6339 | 0.0070 | 0.0044 | 0.6253 |
| 3 | 0 | 0.0436 | / | 0.0039 | 0.0036 | 0.0023 | 0.2470 | 0.1399 | 0.0023 | 0.0077 | 0.0199 | 0.0081 | 0.4085 |
| 4 | 0 | 0.0117 | / | 0.0244 | 0.0271 | / | 0.0141 | 0.1616 | 0.0097 | 0.0346 | −0.0272 | 0.0062 | 0.2278 |
| 5 | −0.2 | −0.0973 | 0.0121 | 0.3250 | −0.1704 | 0.0015 | 0.0026 | 0.1186 | / | 0.4796 | −0.2036 | 0.0037 | 0.0184 |
| 6 | −0.4 | −0.3829 | 0.0038 | 0.0348 | −0.3727 | 0.0069 | 0.0104 | −0.3700 | / | 0.0330 | −0.4072 | 0.0037 | 0.0091 |
| 7 | −0.2 | −0.2059 | 0.0037 | 0.0098 | −0.0327 | 0.0018 | 0.0041 | −0.0968 | / | 0.0248 | −0.1977 | 0.0047 | 0.0235 |
| 8 | 0 | 0.0682 | 0.0036 | 0.1014 | 0.0266 | 0.0038 | 0.0056 | 0.1807 | / | 0.0366 | −0.0156 | 0.0089 | 0.5712 |
| 9 | 0 | −0.0001 | 0.0022 | 0.0083 | 0.0813 | 0.0048 | 0.0841 | 0.1135 | / | 0.4384 | −0.0244 | 0.0071 | 0.2907 |
| 10 | 0 | 0.0468 | 0.0067 | 0.0263 | −0.0314 | 0.0037 | 0.2940 | 0.0855 | / | 0.2556 | 0.0058 | 0.0062 | 1.0808 |
| 11 | 0 | 0.0299 | 0.0043 | 0.0431 | 0.0151 | 0.0045 | 0.0155 | 0.1274 | 0.0018 | 0.0393 | 0.0046 | 0.0027 | 0.5872 |
| 12 | 0 | 0.0211 | 0.0030 | 0.0867 | 0.0336 | 0.0018 | 0.0134 | 0.1086 | / | 0.0620 | −0.0079 | 0.0030 | 0.3828 |
| Modal Order | Undamaged | Damaged |
|---|---|---|
| 1 | 2.6616 | 2.6104 |
| 2 | 7.8329 | 7.3901 |
| 3 | 12.5790 | 12.3932 |
| 4 | 16.6569 | 16.5127 |
| 5 | 19.7584 | 19.0000 |
| 6 | 21.4556 | 21.2004 |
| n | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| 0.4402 | −0.0904 | −0.1299 | −0.1259 | −0.0910 | −0.0126 | |
| 0.0051 | 0.0022 | 0.0033 | 0.0030 | 0.0028 | 0.0023 |
| n | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| 0.4923 | −0.0792 | −0.1438 | −0.2008 | −0.3099 | −0.0250 | |
| 0.0050 | 0.0022 | 0.0034 | 0.0032 | 0.0018 | 0.0023 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, Z.; Wang, W.; Zhang, J. Probabilistic Structural Model Updating with Modal Flexibility Using a Modified Firefly Algorithm. Materials 2022, 15, 8630. https://doi.org/10.3390/ma15238630
Feng Z, Wang W, Zhang J. Probabilistic Structural Model Updating with Modal Flexibility Using a Modified Firefly Algorithm. Materials. 2022; 15(23):8630. https://doi.org/10.3390/ma15238630
Chicago/Turabian StyleFeng, Zhouquan, Wenzan Wang, and Jiren Zhang. 2022. "Probabilistic Structural Model Updating with Modal Flexibility Using a Modified Firefly Algorithm" Materials 15, no. 23: 8630. https://doi.org/10.3390/ma15238630
APA StyleFeng, Z., Wang, W., & Zhang, J. (2022). Probabilistic Structural Model Updating with Modal Flexibility Using a Modified Firefly Algorithm. Materials, 15(23), 8630. https://doi.org/10.3390/ma15238630