
Bridge Non-Destructive Measurements Using a Laser Scanning during Acceptance Testing: Case Study




Abstract
1. Introduction
1.1. Problem Description
1.2. Laser Scanning System
2. Materials and Methods
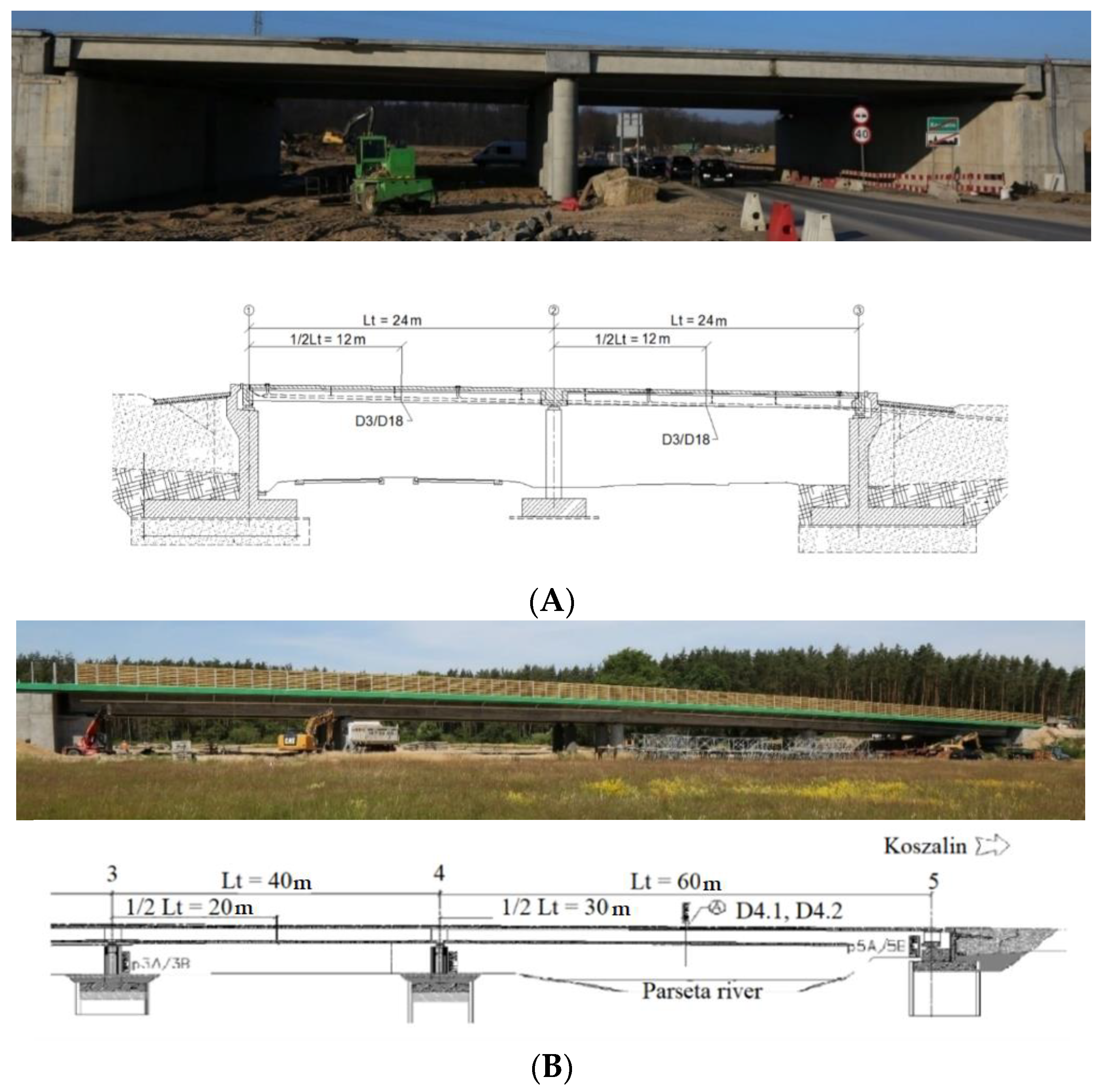
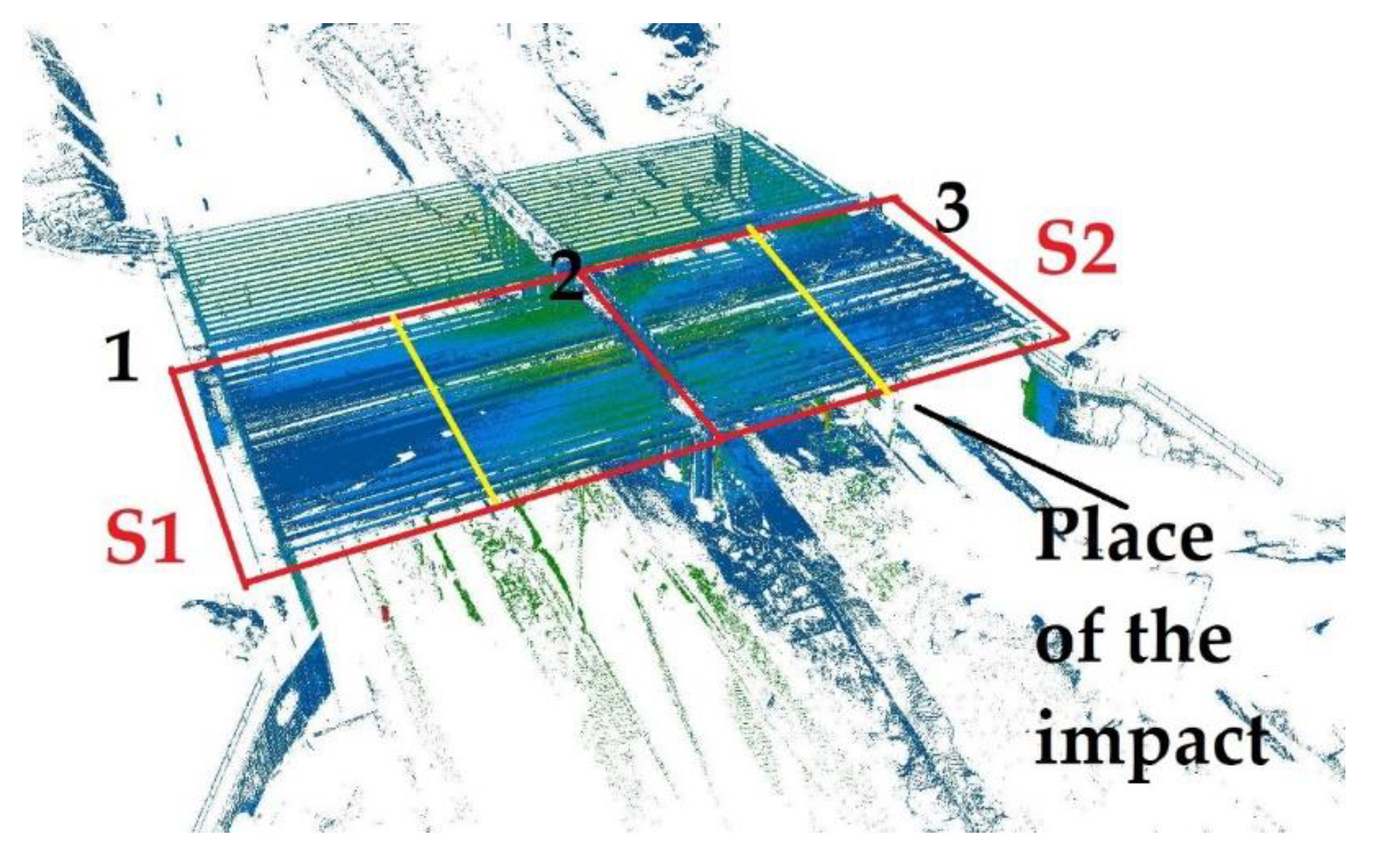
2.1. Study Area
2.2. Standard Scope of Tests for Object’s Non-Standard Nature (M78)
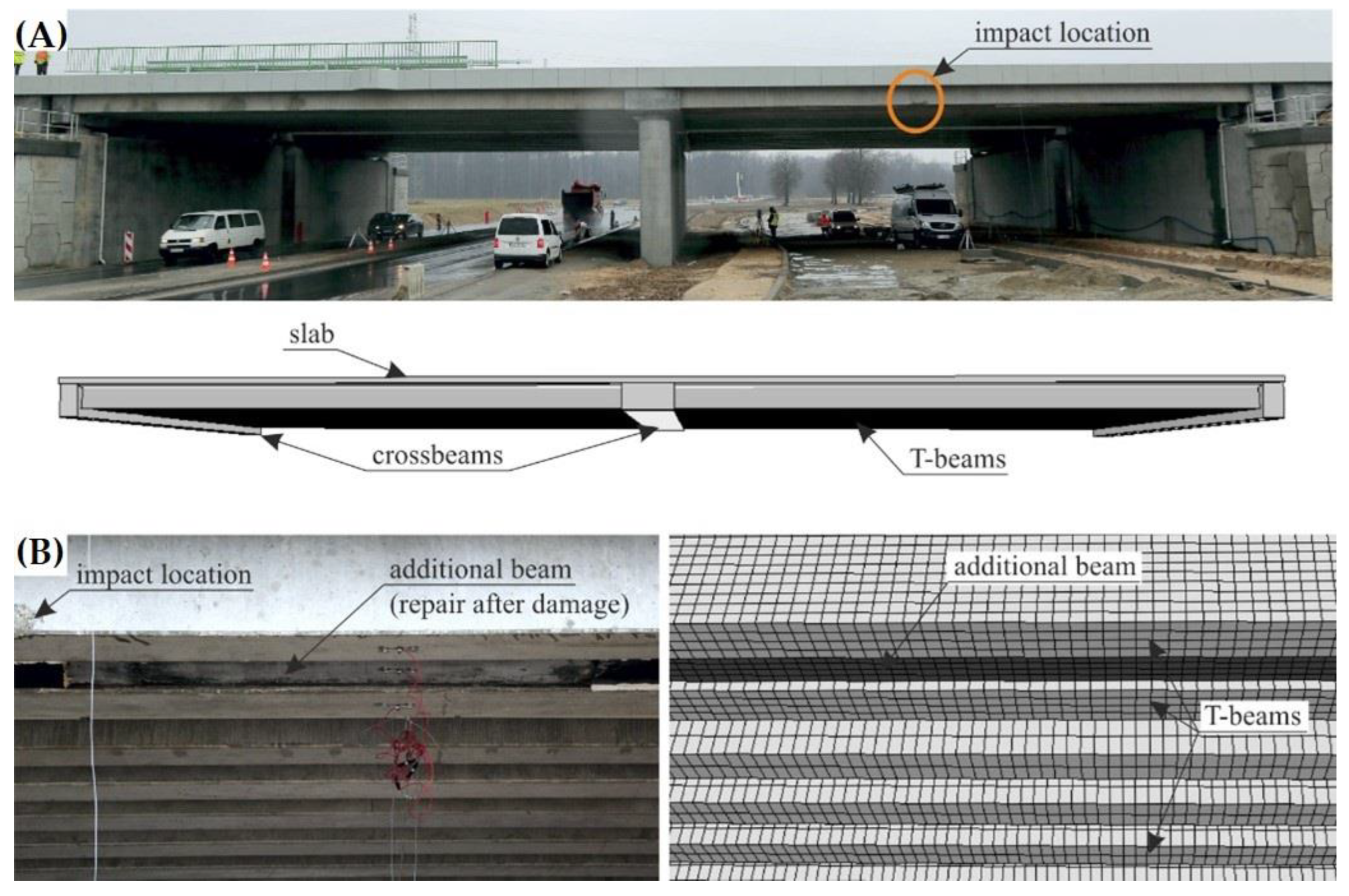
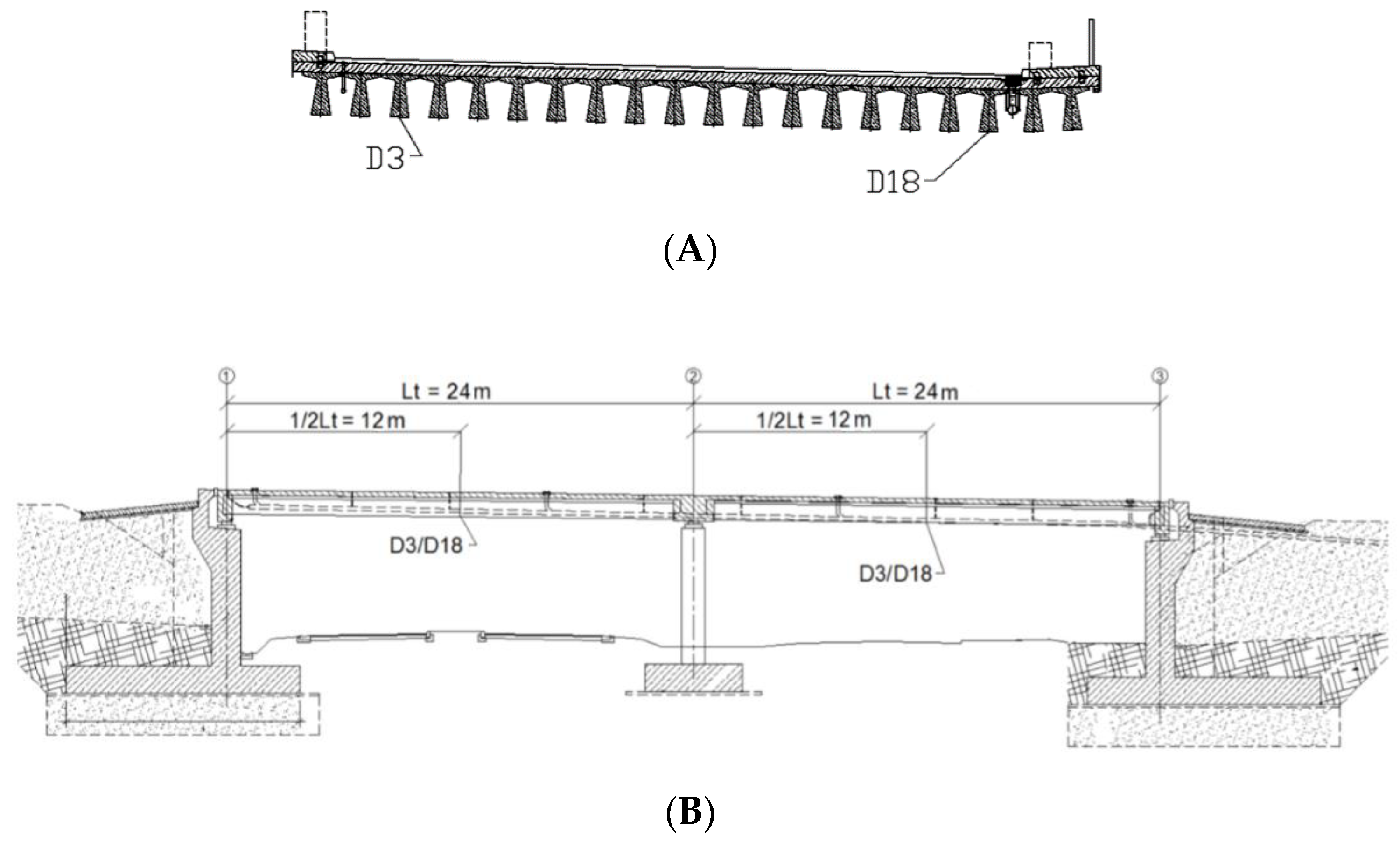
2.3. The Object’s Non-Standard Nature (WD-113)
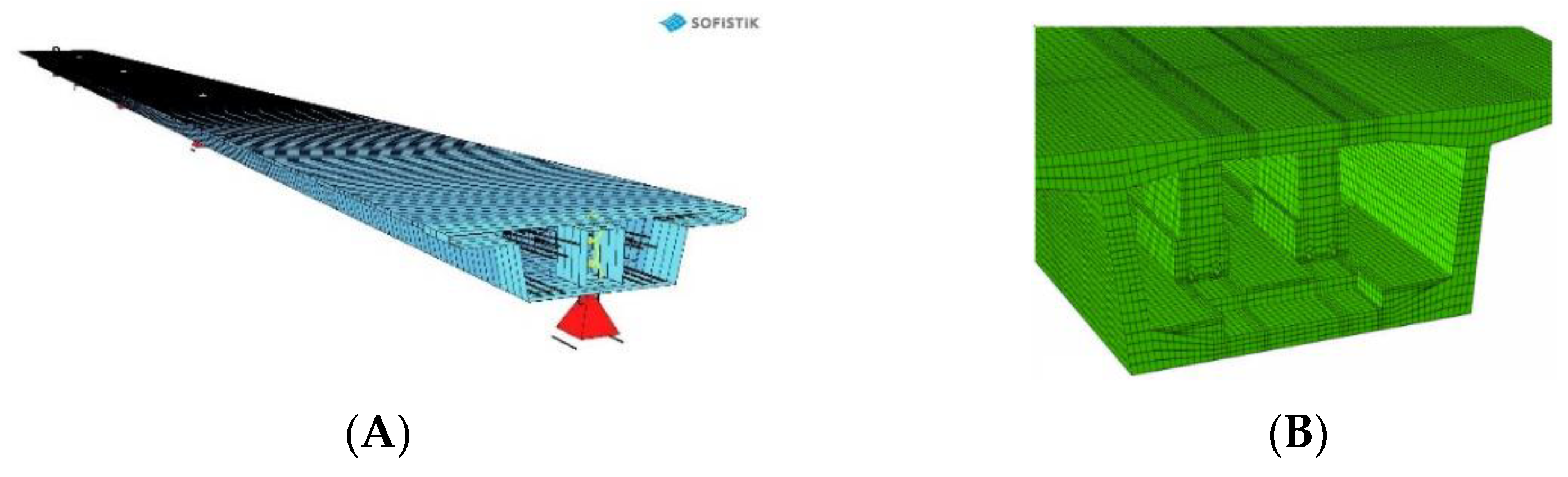
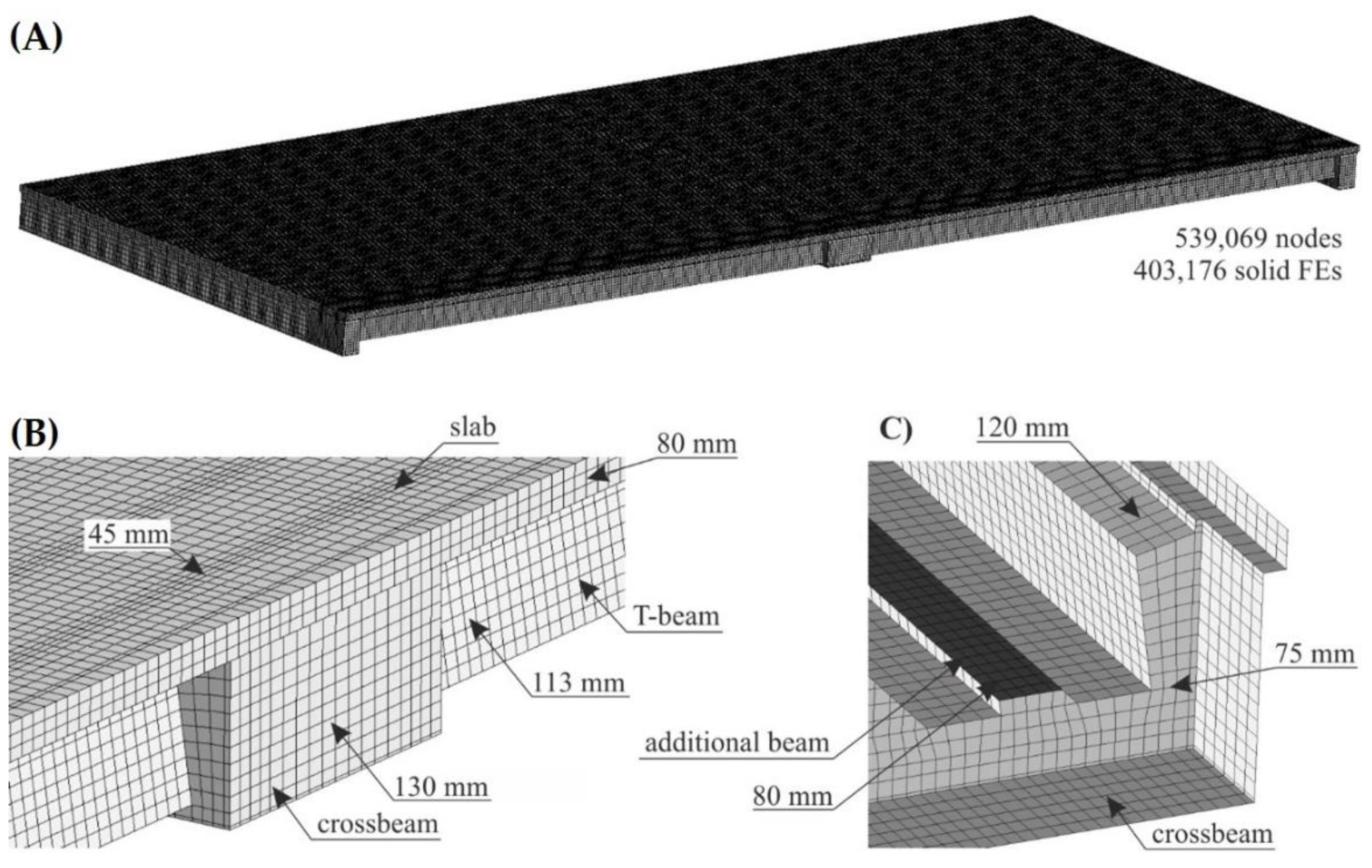
2.3.1. Numerical Modelling of the Structure
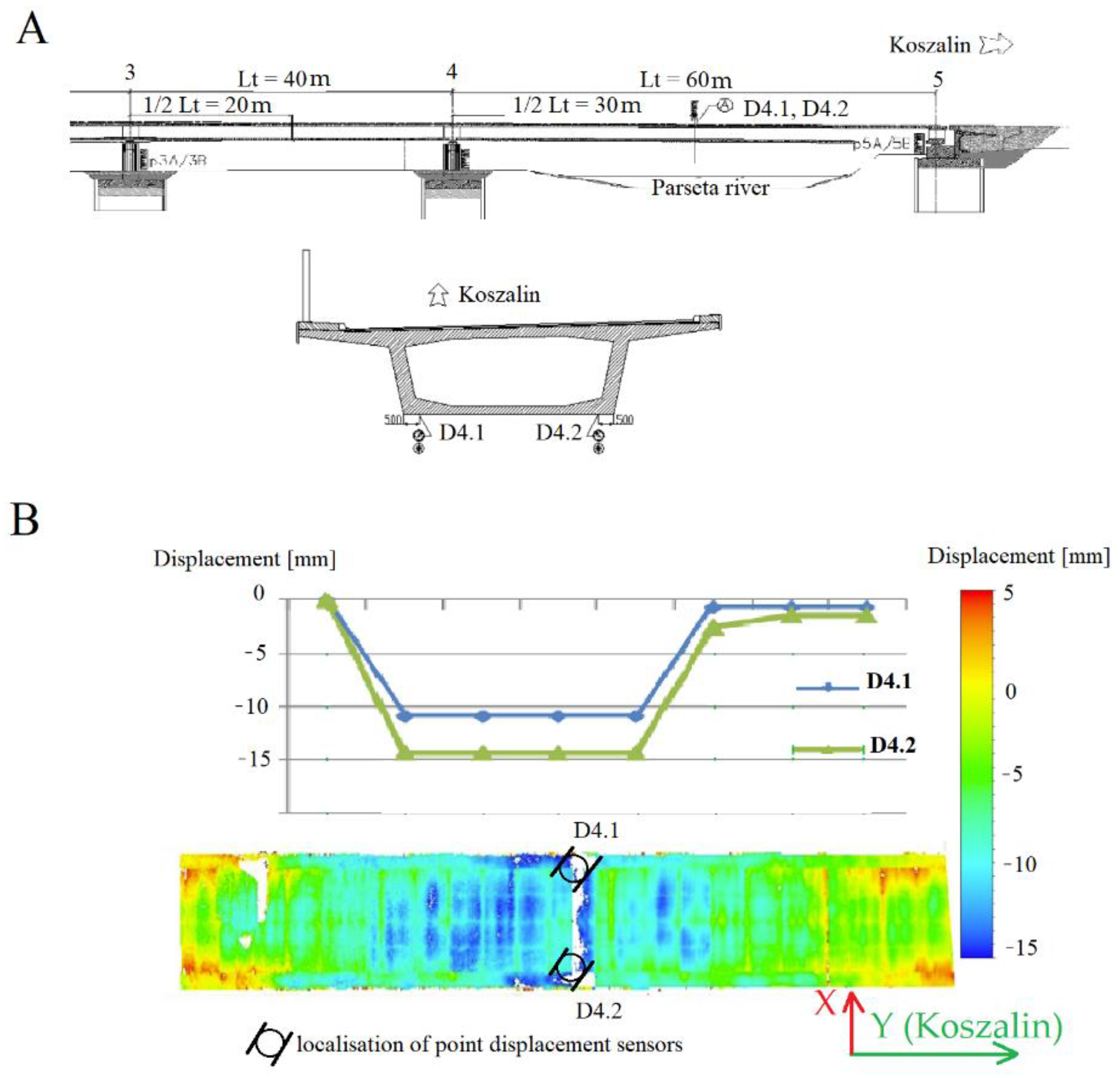
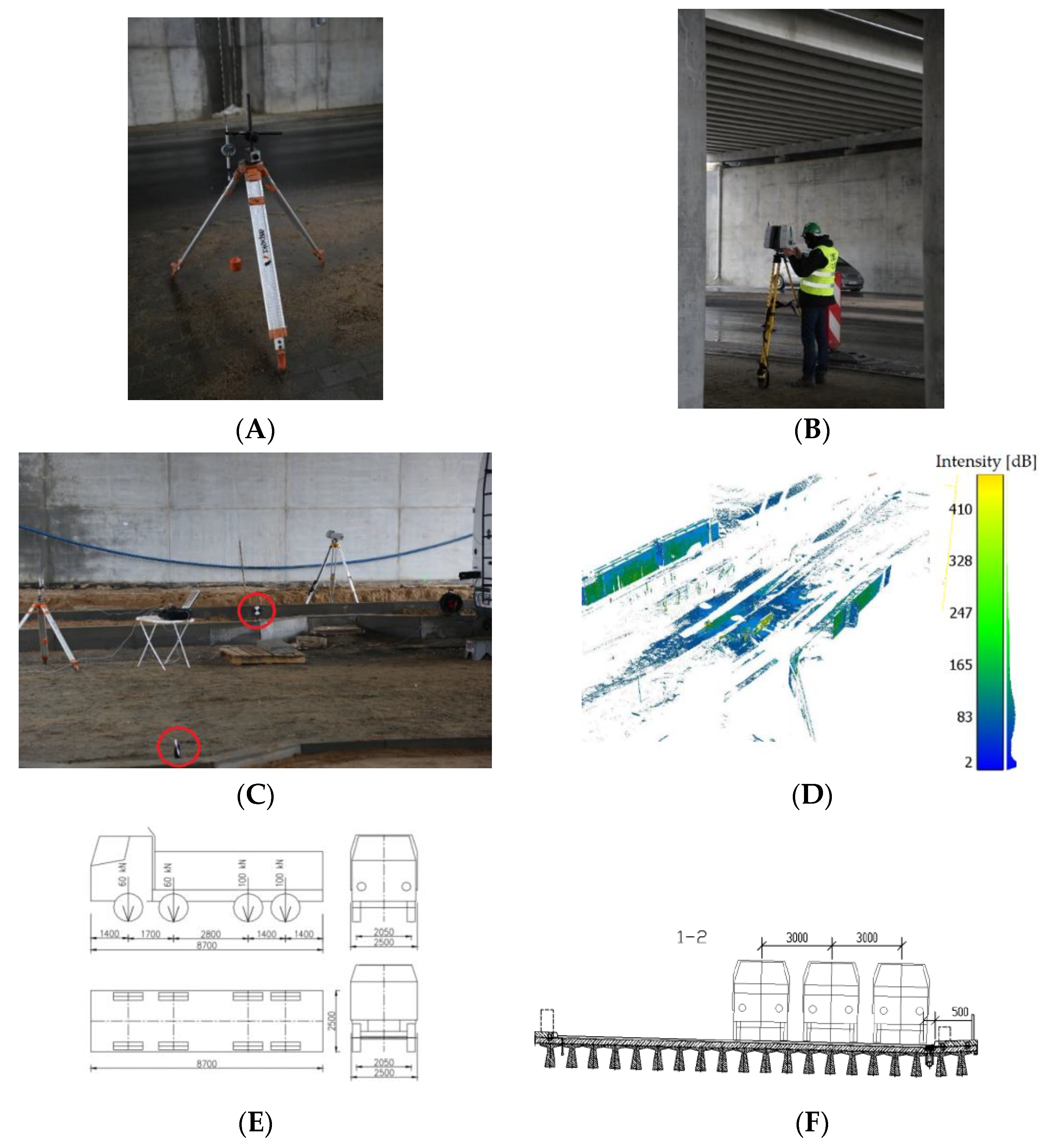
2.3.2. The Scope of Tests and Instruments
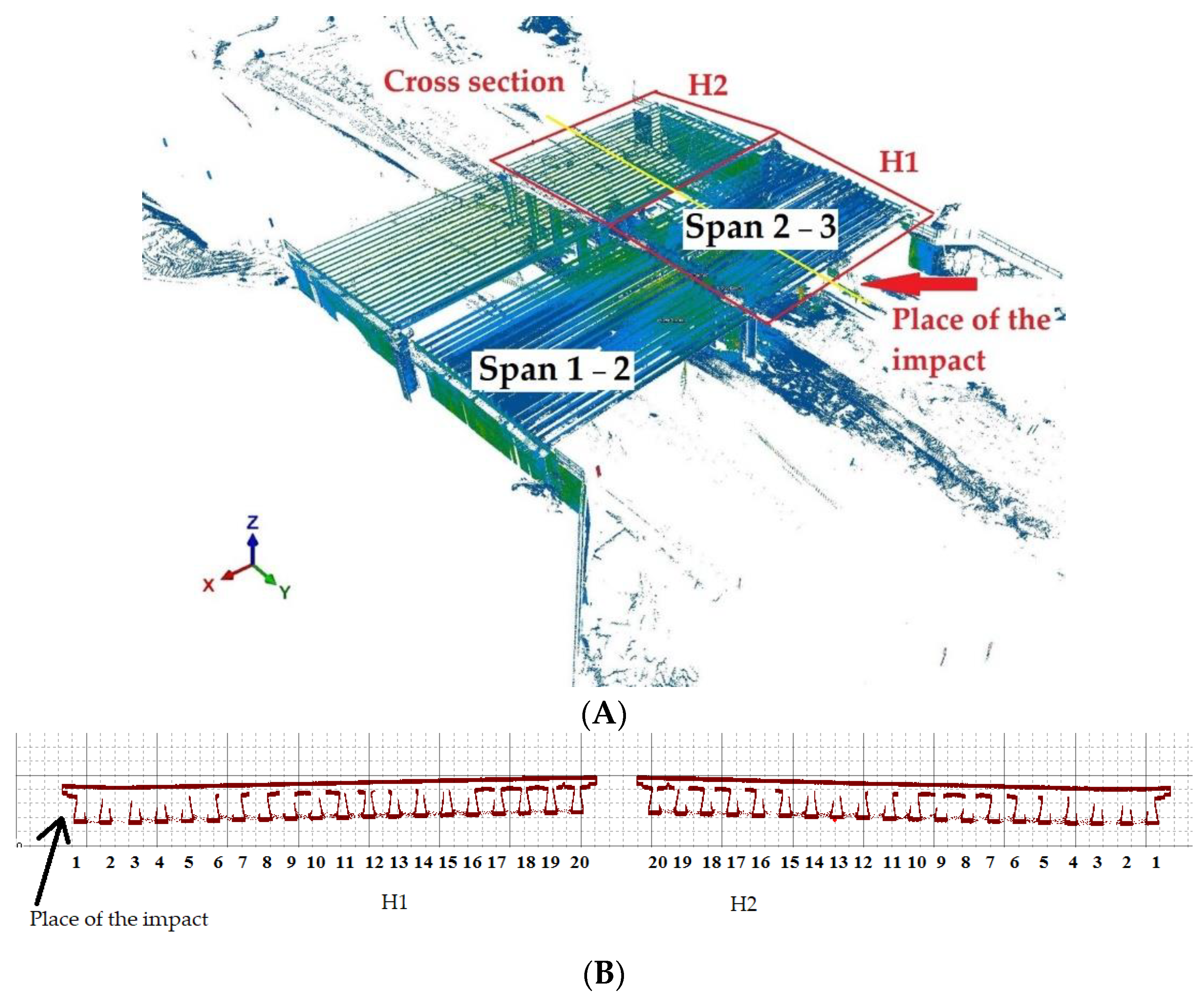
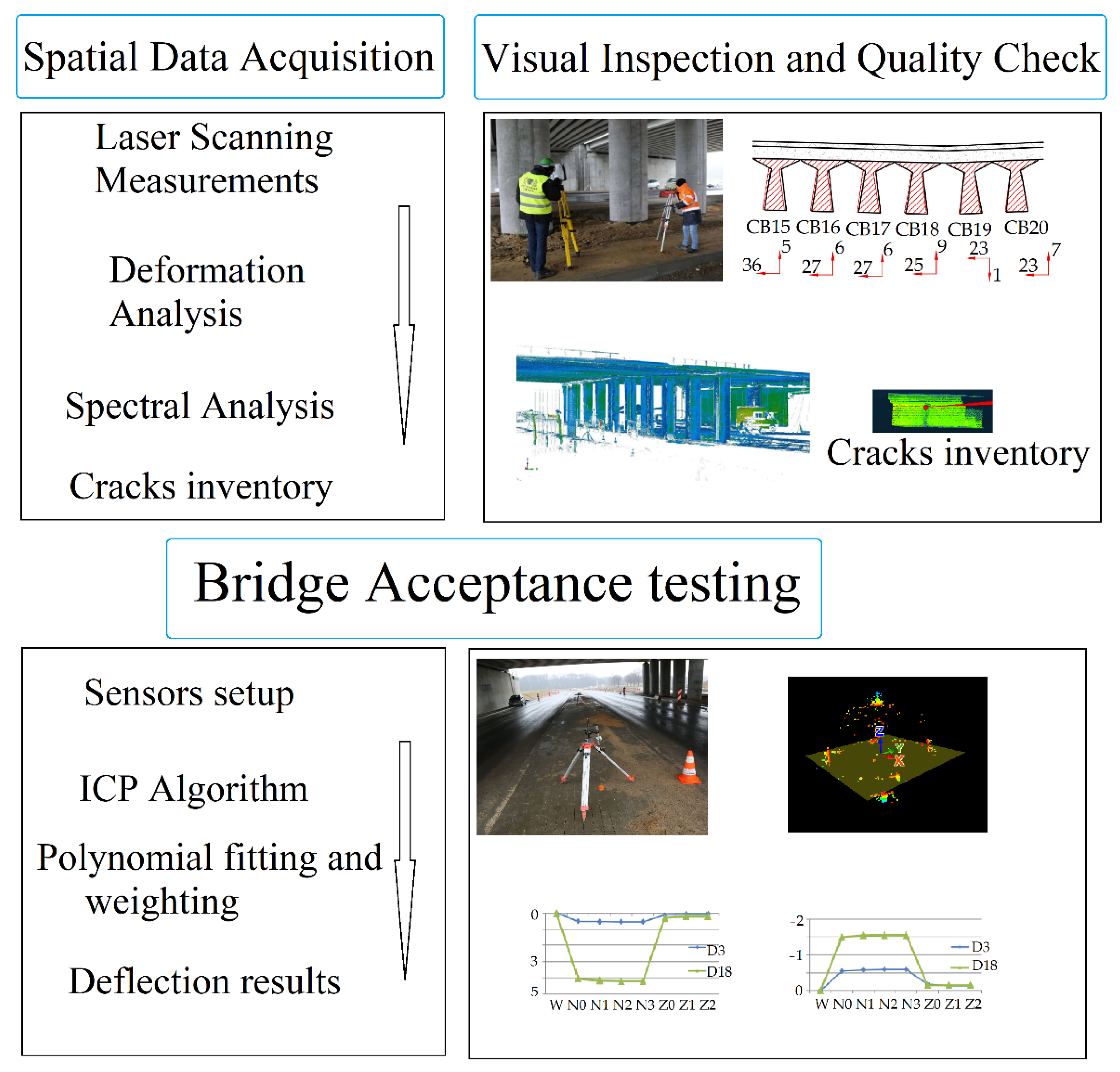
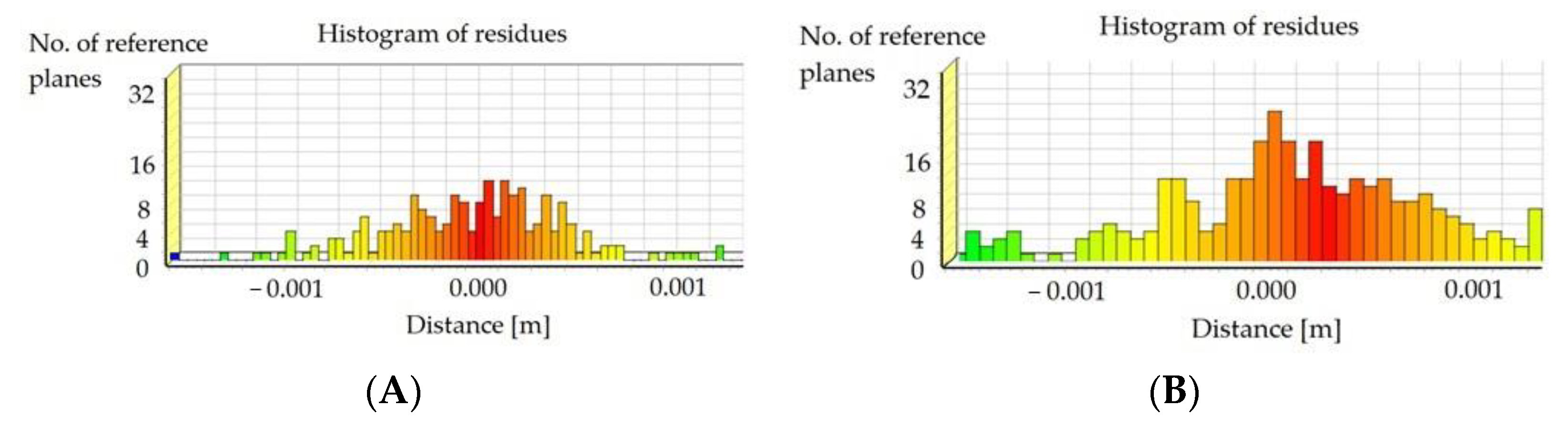
2.3.3. Post-Processing of the Data
3. Experiment Results—Comparison of Measurements
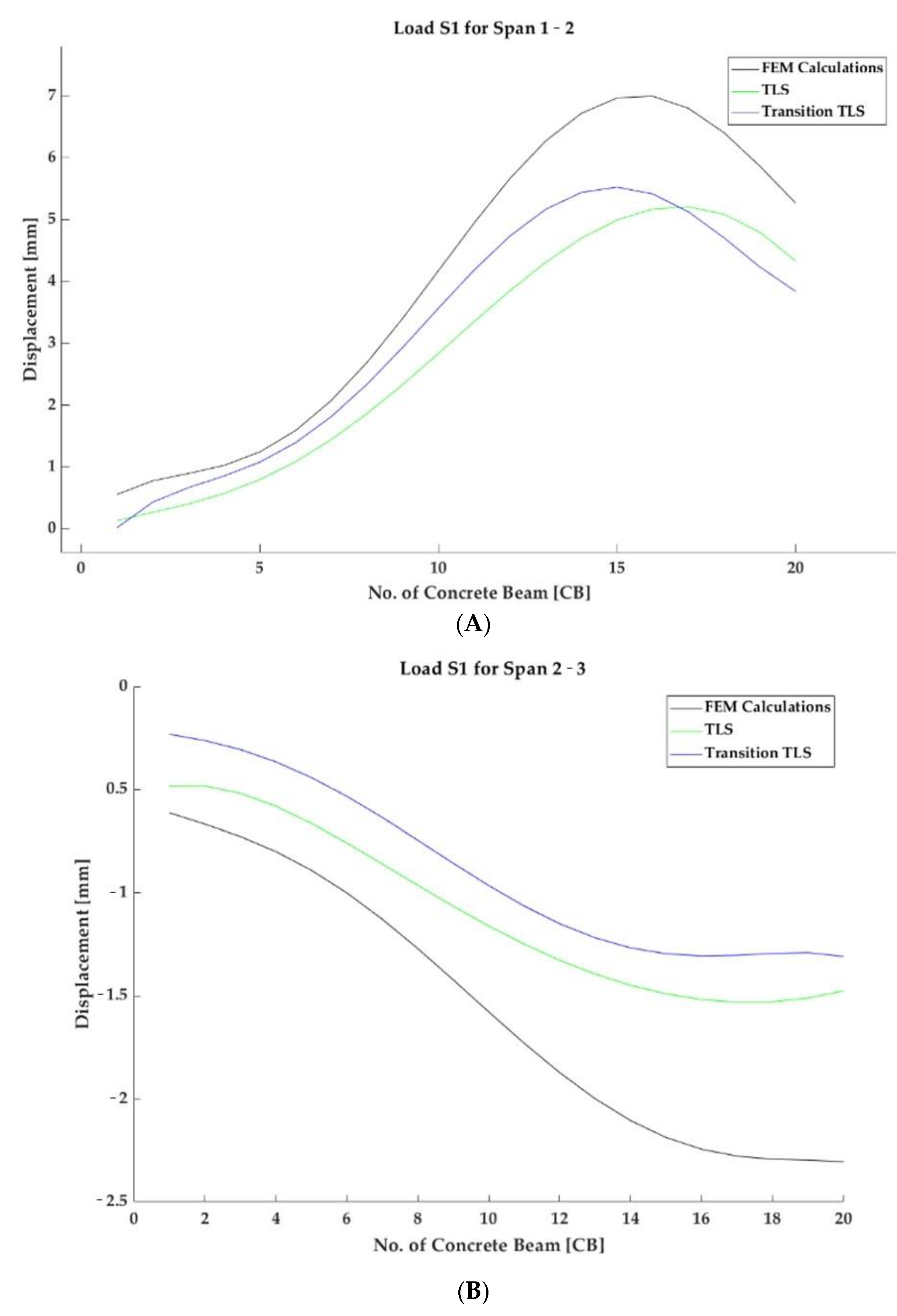
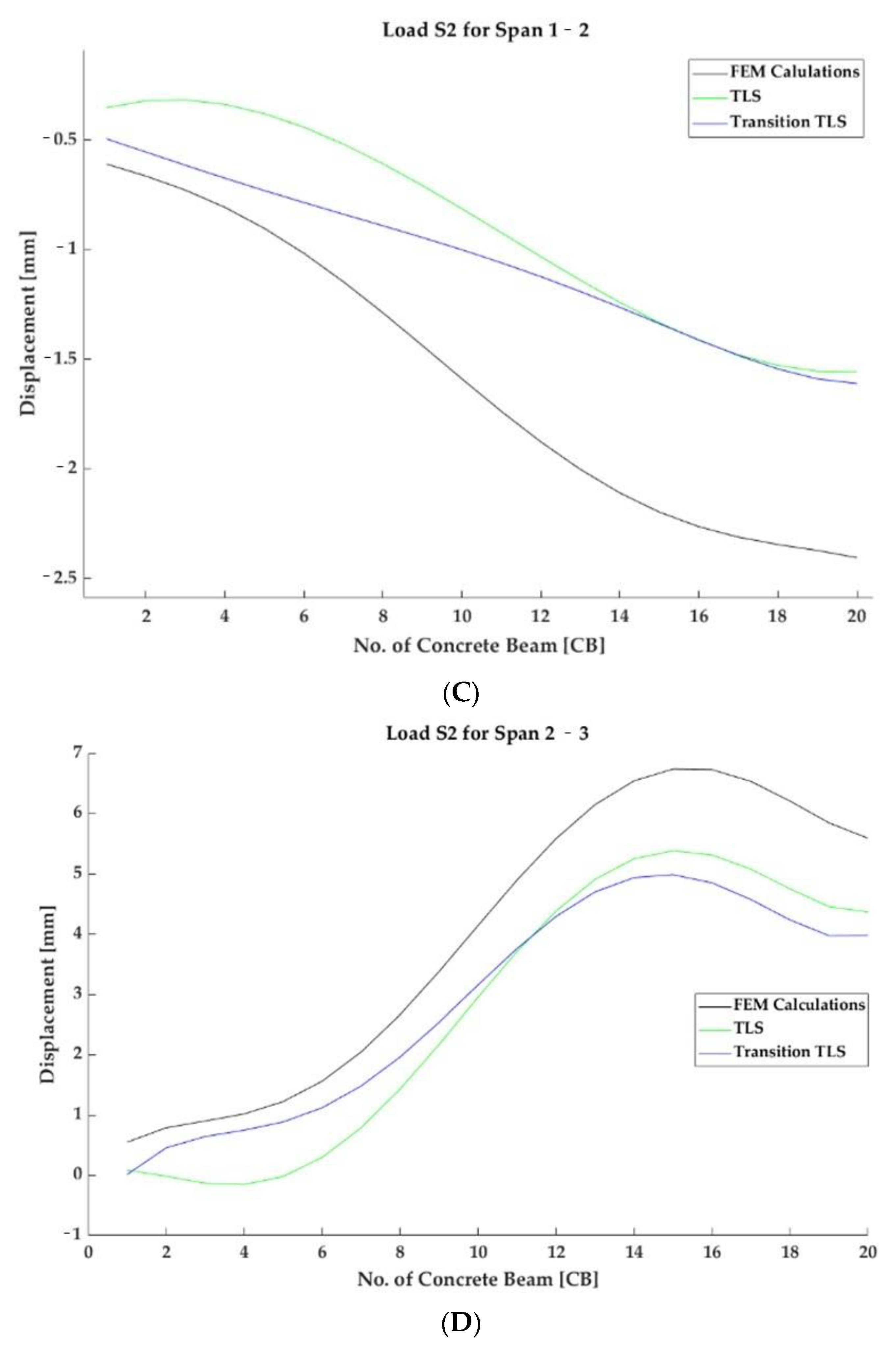
Comparison of Measurements
- (a)
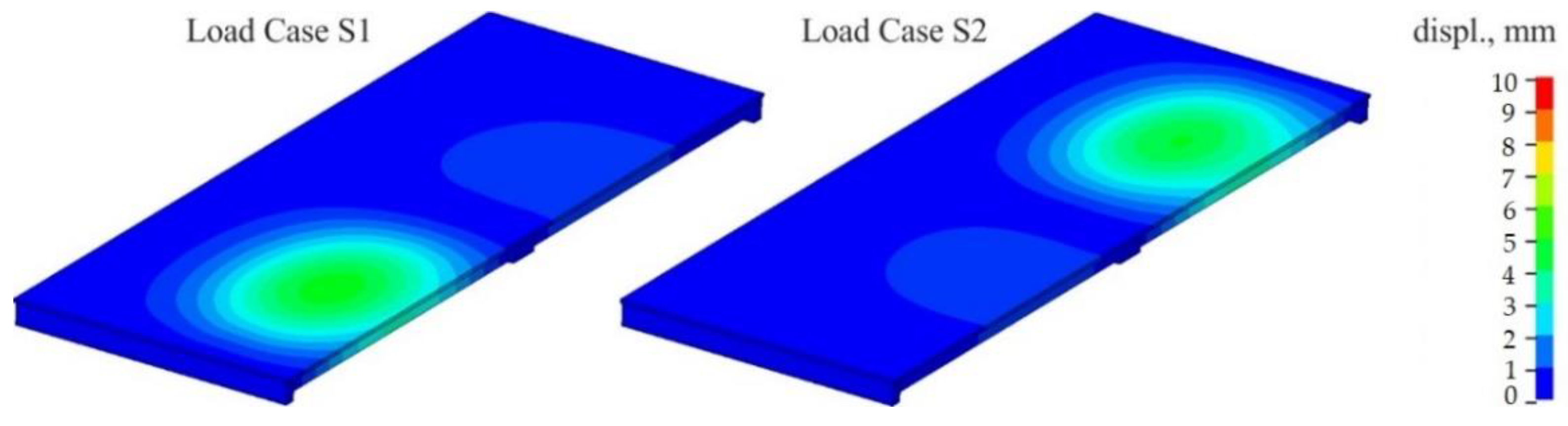
- Numerical tests,
- (b)
- Laser scanning without translation imposed by linear displacement sensors, and
- (c)
- Laser scanning with translation imposed by linear displacement sensors.
4. Discussion
5. Conclusions
- -
- We are able to observe all points on the structure in a selected cross-section during the test.
- -
- The laser scanning technology operates irrespective of lighting conditions and is resistant to weather conditions.
- -
- The tests verified that 0.5 mm accuracy was obtained using the method described herein.
- -
- The test confirmed the design response in accordance with the FEM calculations’ predictions, and the object was approved for use.
- -
- Future research should be related to the computerisation of monitoring solutions in BIM technology and the use of additional sensory solutions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Siwowski, T.; Kaleta, D.; Rajchel, M. Structural behaviour of an all-composite road bridge. Compos. Struct. 2018, 192, 555–567. [Google Scholar] [CrossRef]
- Miskiewicz, M.; Pyrzowski, L. Load Tests of the Movable Footbridge over the Port Canal in Ustka. In Proceedings of the 2017 Baltic Geodetic Congress (Geomatics) IEEE, Gdańsk, Poland, 22–25 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 242–246. [Google Scholar] [CrossRef]
- Jaafaru, H.; Agbelie, B. Bridge maintenance planning framework using machine learning, multi-attribute utility theory and evolutionary optimization models. Autom. Constr. 2022, 141, 104460. [Google Scholar] [CrossRef]
- Olaszek, P.; Łagoda, M.; Casas, J. Diagnostic load testing and assessment of existing bridges: Examples of application. Struct. Infrastruct. Eng. 2014, 10, 834–842. [Google Scholar] [CrossRef]
- Miśkiewicz, M.; Daszkiewicz, K.; Lachowicz, J.; Tysiac, P.; Jaskula, P.; Wilde, K. Nondestructive methods complemented by FEM calculations in diagnostics of cracks in bridge approach pavement. Autom. Constr. 2021, 128, 103753. [Google Scholar] [CrossRef]
- Miśkiewicz, M.; Sobczyk, B.; Tysiac, P. Non-Destructive Testing of the Longest Span Soil-Steel Bridge in Europe—Field Measurements and FEM Calculations. Materials 2020, 13, 3652. [Google Scholar] [CrossRef]
- Janowski, A.; Rapinski, J. M-Split Estimation in Laser Scanning Data Modeling. J. Indian Soc. Remote. Sens. 2013, 41, 15–19. [Google Scholar] [CrossRef]
- Mukupa, W.; Roberts, G.W.; Hancock, C.M.; Al-Manasir, K. A review of the use of terrestrial laser scanning application for change detection and deformation monitoring of structures. Surv. Rev. 2017, 49, 99–116. [Google Scholar] [CrossRef]
- Weinmann, M.; Jutzi, B. Geometric point quality assessment for the automated, markerless and robust registration of un-ordered TLS point clouds. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, II-3/W5, 89–96. [Google Scholar] [CrossRef]
- Beshr, A.A.E.-W.; Kaloop, M.R. Monitoring Bridge Deformation Using Auto-Correlation Adjustment Technique for Total Station Observations. Positioning 2013, 4, 1–7. [Google Scholar] [CrossRef]
- Stiros, S.C.; Psimoulis, P.A. Response of a historical short-span railway bridge to passing trains: 3-D deflections and dominant frequencies derived from Robotic Total Station (RTS) measurements. Eng. Struct. 2012, 45, 362–371. [Google Scholar] [CrossRef]
- Berényi, A.; Lovas, T.; Barsi, Á.; Dunai, L. Potential of terrestrial laserscanning in load test measurements of bridges. Period. Polytech. Civ. Eng. 2009, 53, 25–33. [Google Scholar] [CrossRef]
- Jaáuregui, D.V.; White, K.R.; Woodward, C.B.; Leitch, K.R. Noncontact Photogrammetric Measurement of Vertical Bridge Deflection. J. Bridg. Eng. 2003, 8, 212–222. [Google Scholar] [CrossRef]
- Kwiatkowski, J.; Anigacz, W.; Beben, D. Comparison of Non-Destructive Techniques for Technological Bridge Deflection Testing. Materials 2020, 13, 1908. [Google Scholar] [CrossRef] [PubMed]
- Seo, H.; Zhao, Y.; Chen, C. Displacement Estimation Error in Laser Scanning Monitoring of Retaining Structures Considering Roughness. Sensors 2021, 21, 7370. [Google Scholar] [CrossRef]
- Chan, T.O.; Xiao, H.; Liu, L.; Sun, Y.; Chen, T.; Lang, W.; Li, M.H. A Post-Scan Point Cloud Colorization Method for Cultural Heritage Documentation. ISPRS Int. J. Geo-Inf. 2021, 10, 737. [Google Scholar] [CrossRef]
- Ling, X. Research on Building Measurement Accuracy Verification Based on Terrestrial 3D Laser Scanner. In Proceedings of the 2020 Asia Conference on Geological Research and Environmental Technology, Kamakura, Japan, 10–11 October 2021; p. 052086. [Google Scholar] [CrossRef]
- Garavaglia, E.; Anzani, A.; Maroldi, F.; Vanerio, F. Non-Invasive Identification of Vulnerability Elements in Existing Buildings and Their Visualization in the BIM Model for Better Project Management: The Case Study of Cuccagna Farmhouse. Appl. Sci. 2020, 10, 2119. [Google Scholar] [CrossRef]
- Suchocki, C. Comparison of Time-of-Flight and Phase-Shift TLS Intensity Data for the Diagnostics Measurements of Buildings. Materials 2020, 13, 353. [Google Scholar] [CrossRef]
- Xia, T.; Yang, J.; Chen, L. Automated semantic segmentation of bridge point cloud based on local descriptor and machine learning. Autom. Constr. 2022, 133, 103992. [Google Scholar] [CrossRef]
- Janowski, A.; Nagrodzka-Godycka, K.; Szulwic, J.; Ziółkowski, P. Modes of Failure Analysis in Reinforced Concrete Beam Using Laser Scanning and Synchro-Photogrammetry—How to apply optical technologies in the diagnosis of reinforced concrete elements? Int. J. Adv. Comput. Sci. Its Appl. 2015, 5, 196–200. [Google Scholar]
- Elsherif, A.; Gaulton, R.; Shenkin, A.; Malhi, Y.; Mills, J. Three dimensional mapping of forest canopy equivalent water thickness using dual-wavelength terrestrial laser scanning. Agric. For. Meteorol. 2019, 276–277, 107627. [Google Scholar] [CrossRef]
- Gaulton, R.; Danson, F.; Ramirez, F.; Gunawan, O. The potential of dual-wavelength laser scanning for estimating vegetation moisture content. Remote. Sens. Environ. 2013, 132, 32–39. [Google Scholar] [CrossRef]
- Blistan, P.; Jacko, S.; Kovanič, L.; Kondela, J.; Pukanská, K.; Bartoš, K. TLS and SfM Approach for Bulk Density Determination of Excavated Heterogeneous Raw Materials. Minerals 2020, 10, 174. [Google Scholar] [CrossRef]
- Wu, X.; Tang, N.; Liu, B.; Long, Z. A novel high precise laser 3D profile scanning method with flexible calibration. Opt. Lasers Eng. 2020, 132, 105938. [Google Scholar] [CrossRef]
- Kargar, A.R.; MacKenzie, R.; Asner, G.P.; van Aardt, J. A Density-Based Approach for Leaf Area Index Assessment in a Complex Forest Environment Using a Terrestrial Laser Scanner. Remote Sens. 2019, 11, 1791. [Google Scholar] [CrossRef]
- Elsherif, A.; Gaulton, R.; Mills, J. Four Dimensional Mapping of Vegetation Moisture Content Using Dual-Wavelength Terrestrial Laser Scanning. Remote Sens. 2019, 11, 2311. [Google Scholar] [CrossRef]
- Sevara, C.; Wieser, M.; Doneus, M.; Pfeifer, N. Relative Radiometric Calibration of Airborne LiDAR Data for Archaeological Applications. Remote Sens. 2019, 11, 945. [Google Scholar] [CrossRef]
- Binczyk, M.; Kalitowski, P.; Szulwic, J.; Tysiac, P. Nondestructive Testing of the Miter Gates Using Various Measurement Methods. Sensors 2020, 20, 1749. [Google Scholar] [CrossRef]
- Ziolkowski, P.; Szulwic, J.; Miskiewicz, M. Deformation Analysis of a Composite Bridge during Proof Loading Using Point Cloud Processing. Sensors 2018, 18, 4332. [Google Scholar] [CrossRef]
- Riveiro, B.; González-Jorge, H.; Varela, M.; Jáuregui, D.V. Validation of terrestrial laser scanning and photogrammetry techniques for the measurement of vertical underclearance and beam geometry in structural inspection of bridges. Measurement 2013, 46, 784–794. [Google Scholar] [CrossRef]
- Reagan, D.; Sabato, A.; Niezrecki, C. Feasibility of using digital image correlation for unmanned aerial vehicle structural health monitoring of bridges. Struct. Health Monit. 2017, 17, 1056–1072. [Google Scholar] [CrossRef]
- Bonopera, M.; Chang, K.-C.; Chen, C.-C.; Lee, Z.-K.; Sung, Y.-C.; Tullini, N. Fiber Bragg Grating–Differential Settlement Measurement System for Bridge Displacement Monitoring: Case Study. J. Bridg. Eng. 2019, 24, 05019011. [Google Scholar] [CrossRef]
- Miśkiewicz, M.; Pyrzowski, Ł. Load test of new European record holder in span length among extradosed type bridges. E3S Web Conf. 2018, 63, 00006. [Google Scholar] [CrossRef]
- European Standard EN 1317-1; Road Restraint Systems. Part 1: Terminology and General Criteria for Test Methods. The European Committee for Standardization: Brussels, Belgium, 2010.
- European Standard-EN 1317-2; Road Restraint Systems—Part 2: Performance Classes, Impact Test Acceptance Criteria and Test Methods for Safety Barriers including Vehicle Parapets. The European Committee for Standardization: Brussels, Belgium, 2010.
- Caglayan, O.; Ozakgul, K.; Tezer, O.; Piroglu, F. In-Situ Field Measurements and Numerical Model Identification of a Multi-Span Steel Railway Bridge. J. Test. Eval. 2015, 43, 1323–1337. [Google Scholar] [CrossRef]
- Lantsoght, E.O.L.; Koekkoek, R.T.; van der Veen, C.; Hordijk, D.A.; de Boer, A. Pilot Proof-Load Test on Viaduct De Beek: Case Study. J. Bridg. Eng. 2017, 22, 05017014. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, X.; Wang, Y. A Rapid Detection Method for Bridges Based on Impact Coefficient of Standard Bumping. Math. Probl. Eng. 2018, 2018, 9195289. [Google Scholar] [CrossRef]
- Jamadin, A.; Mohd Amin, N.; Alisibramulisi, A.; Suliman, N.H.; Malai Hussin, M.H.S.; Ibrahim, Z. Dynamic behavior of existing steel pedestrian bridge. Int. J. Civ. Eng. Technol. 2018, 9, 1443–1450. Available online: https://iaeme.com/MasterAdmin/Journal_uploads/IJCIET/VOLUME_9_ISSUE_7/IJCIET_09_07_153.pdf (accessed on 29 October 2022).
- Frunzio, G.; Monaco, M.; Gesualdo, A. 3D FEM Analysis of a Roman Arch Bridge. In Proceedings of the Historical Constructions, Conference: Historical Construction, Guimarães, Portugal, January 2001. [Google Scholar]
- Sánchez-Aparicio, L.J.; Bautista-De Castro, A.; Conde, B.; Carrasco, P.; Ramos, L.F. Non-destructive means and methods for structural diagnosis of masonry arch bridges. Autom. Constr. 2019, 104, 360–382. [Google Scholar] [CrossRef]
- Andersson, A.; Malm, R. Measurement Evaluation and FEM Simulation of Bridge Dynamics. Master’s Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, January 2004. Available online: http://urn.kb.se/resolve?urn=urn:nbn:se:kth:diva-162 (accessed on 29 October 2022).
- Hino, J.; Yoshimura, T.; Konishi, K.; Ananthanarayana, N. A finite element method prediction of the vibration of a bridge subjected to a moving vehicle load. J. Sound Vib. 1984, 96, 45–53. [Google Scholar] [CrossRef]
- Lubowiecka, I.; Armesto, J.; Arias, P.; Lorenzo, H. Historic bridge modelling using laser scanning, ground penetrating radar and finite element methods in the context of structural dynamics. Eng. Struct. 2009, 31, 2667–2676. [Google Scholar] [CrossRef]
- Miśkiewicz, M.; Bruski, D.; Chróścielewski, J.; Wilde, K. Safety assessment of a concrete viaduct damaged by vehicle impact and an evaluation of the repair. Eng. Fail. Anal. 2019, 106, 104147. [Google Scholar] [CrossRef]
- Burdziakowski, P.; Tysiac, P. Combined Close Range Photogrammetry and Terrestrial Laser Scanning for Ship Hull Modelling. Geosciences 2019, 9, 242. [Google Scholar] [CrossRef]
- Pomerleau, F.; Colas, F.; Siegwart, R. A Review of Point Cloud Registration Algorithms for Mobile Robotics. Found. Trends Robot. 2015, 4, 1–104. [Google Scholar] [CrossRef]
- Mellado, N.; Dellepiane, M.; Scopigno, R. Relative Scale Estimation and 3D Registration of Multi-Modal Geometry Using Growing Least Squares. IEEE Trans. Vis. Comput. Graph. 2016, 22, 2160–2173. [Google Scholar] [CrossRef] [PubMed]
- Makovetskii, A.; Voronin, S.; Kober, V.; Voronin, A. Point Cloud Registration Based on Multiparameter Functional. Mathematics 2021, 9, 2589. [Google Scholar] [CrossRef]
- Xu, G.; Pang, Y.; Bai, Z.; Wang, Y.; Lu, Z. A Fast Point Clouds Registration Algorithm for Laser Scanners. Appl. Sci. 2021, 11, 3426. [Google Scholar] [CrossRef]
- Li, Y.; Liu, P.; Li, H.; Huang, F. A Comparison Method for 3D Laser Point Clouds in Displacement Change Detection for Arch Dams. ISPRS Int. J. Geo-Inf. 2021, 10, 184. [Google Scholar] [CrossRef]
- Marchel, Ł.; Specht, C.; Specht, M. Testing the Accuracy of the Modified ICP Algorithm with Multimodal Weighting Factors. Energies 2020, 13, 5939. [Google Scholar] [CrossRef]
- Eslami, M.; Saadatseresht, M. Imagery Network Fine Registration by Reference Point Cloud Data Based on the Tie Points and Planes. Sensors 2021, 21, 317. [Google Scholar] [CrossRef]
- Farella, E.; Torresani, A.; Remondino, F. Refining the Joint 3D Processing of Terrestrial and UAV Images Using Quality Measures. Remote Sens. 2020, 12, 2873. [Google Scholar] [CrossRef]
- Frýba, L.; Pirner, M. Load tests and modal analysis of bridges. Eng. Struct. 2001, 23, 102–109. [Google Scholar] [CrossRef]
- Prieto, I.; Izkara, J.L.; Usobiaga, E. The Application of LiDAR Data for the Solar Potential Analysis Based on Urban 3D Model. Remote Sens. 2019, 11, 2348. [Google Scholar] [CrossRef]
- Cui, Y.; Li, Q.; Dong, Z. Structural 3D Reconstruction of Indoor Space for 5G Signal Simulation with Mobile Laser Scanning Point Clouds. Remote Sens. 2019, 11, 2262. [Google Scholar] [CrossRef]
- Koeva, M.; Nikoohemat, S.; Elberink, S.O.; Morales, J.; Lemmen, C.; Zevenbergen, J. Towards 3D Indoor Cadastre Based on Change Detection from Point Clouds. Remote Sens. 2019, 11, 1972. [Google Scholar] [CrossRef]
- Ossowski, R.; Przyborski, M.; Tysiac, P. Stability Assessment of Coastal Cliffs Incorporating Laser Scanning Technology and a Numerical Analysis. Remote Sens. 2019, 11, 1951. [Google Scholar] [CrossRef]
- Cosenza, D.N.; Pereira, L.G.; Guerra-Hernández, J.; Pascual, A.; Soares, P.; Tomé, M. Impact of Calibrating Filtering Algorithms on the Quality of LiDAR-Derived DTM and on Forest Attribute Estimation through Area-Based Approach. Remote Sens. 2020, 12, 918. [Google Scholar] [CrossRef]
- Sobczyk, B. LNG Tank in Świnoujście: Nonlinear Analysis of the Tank Dome Elements Behaviour. Pol. Marit. Res. 2020, 27, 139–147. [Google Scholar] [CrossRef]
- Miśkiewicz, M.; Pyrzowski, Ł.; Sobczyk, B. Short and Long Term Measurements in Assessment of FRP Composite Footbridge Behavior. Materials 2020, 13, 525. [Google Scholar] [CrossRef] [PubMed]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Span 1–2 | Span 2–3 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| No. | CB 3 | CB 18 | CB 3 | CB 18 | ||||||||
| [mm] | [mm] | [mm] | [mm] | |||||||||
| Linear | FEM | TLS | Linear | FEM | TLS | Linear | FEM | TLS | Linear | FEM | TLS | |
| S1 | 0.80 | 0.90 | 0.50 | 4.64 | 6.40 | 4.50 | −0.33 | −0.70 | 0 | −1.30 | −2.30 | −1.50 |
| S2 | −0.59 | −0.70 | −0.50 | −1.55 | −2.30 | −1.00 | 0.54 | 0.90 | 0 | 4.21 | 6.10 | 4.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tysiac, P.; Miskiewicz, M.; Bruski, D. Bridge Non-Destructive Measurements Using a Laser Scanning during Acceptance Testing: Case Study. Materials 2022, 15, 8533. https://doi.org/10.3390/ma15238533
Tysiac P, Miskiewicz M, Bruski D. Bridge Non-Destructive Measurements Using a Laser Scanning during Acceptance Testing: Case Study. Materials. 2022; 15(23):8533. https://doi.org/10.3390/ma15238533
Chicago/Turabian StyleTysiac, Pawel, Mikolaj Miskiewicz, and Dawid Bruski. 2022. "Bridge Non-Destructive Measurements Using a Laser Scanning during Acceptance Testing: Case Study" Materials 15, no. 23: 8533. https://doi.org/10.3390/ma15238533
APA StyleTysiac, P., Miskiewicz, M., & Bruski, D. (2022). Bridge Non-Destructive Measurements Using a Laser Scanning during Acceptance Testing: Case Study. Materials, 15(23), 8533. https://doi.org/10.3390/ma15238533