
Particle Size Inversion Constrained by L∞ Norm for Dynamic Light Scattering

Abstract
1. Introduction
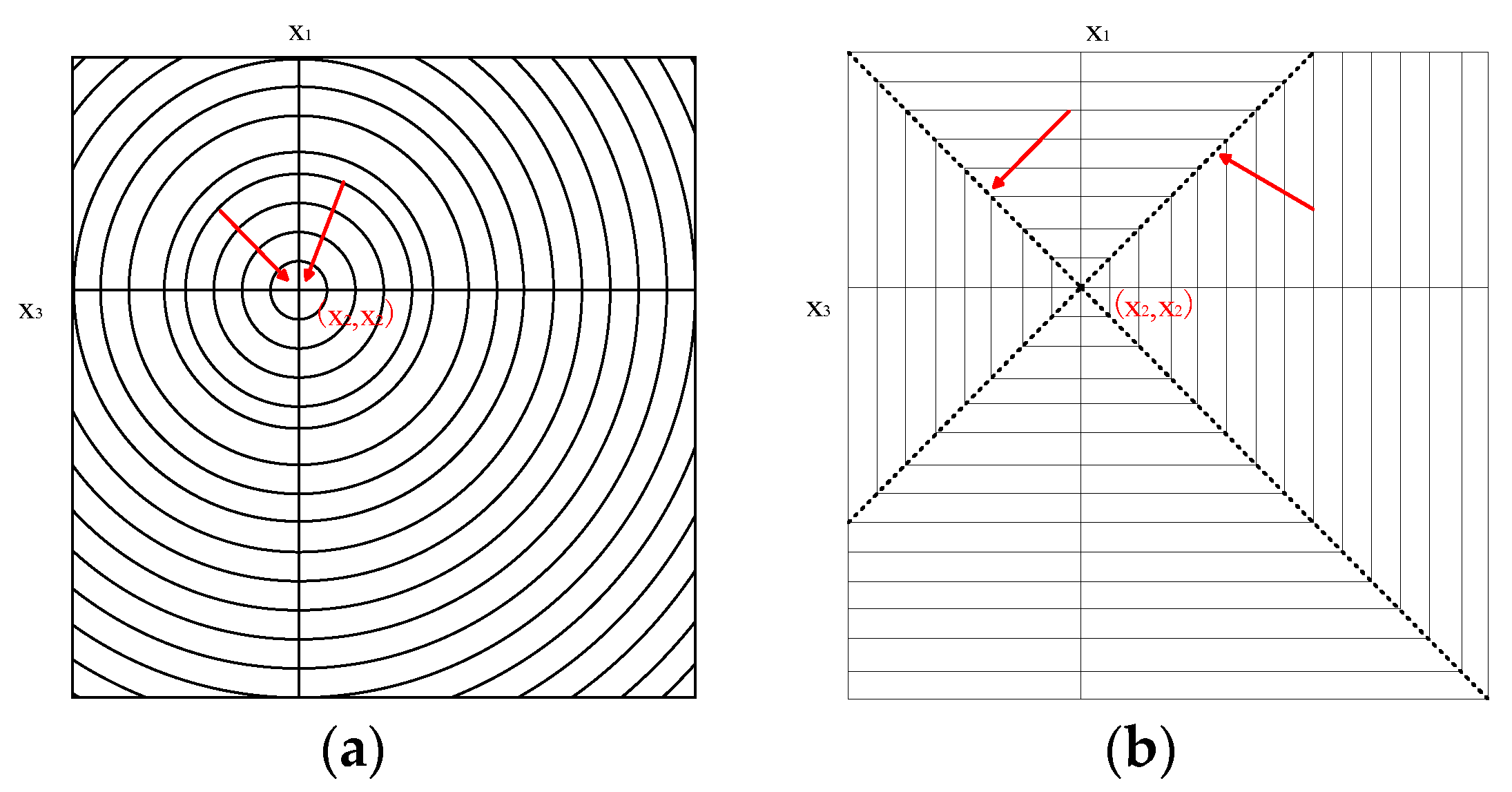
2. LP Norm Constrained Regularization Model for Dynamic Light Scattering
3. Simulation Experiment Parameters and Evaluation Indicators
- (1)
- Distribution error E.
- (2)
- Peak value error
4. Analysis of Simulated Data with Different Norms
4.1. Simulated Inversion with Different Norms
4.2. Discussion
5. Inversion Analysis of L∞ Model
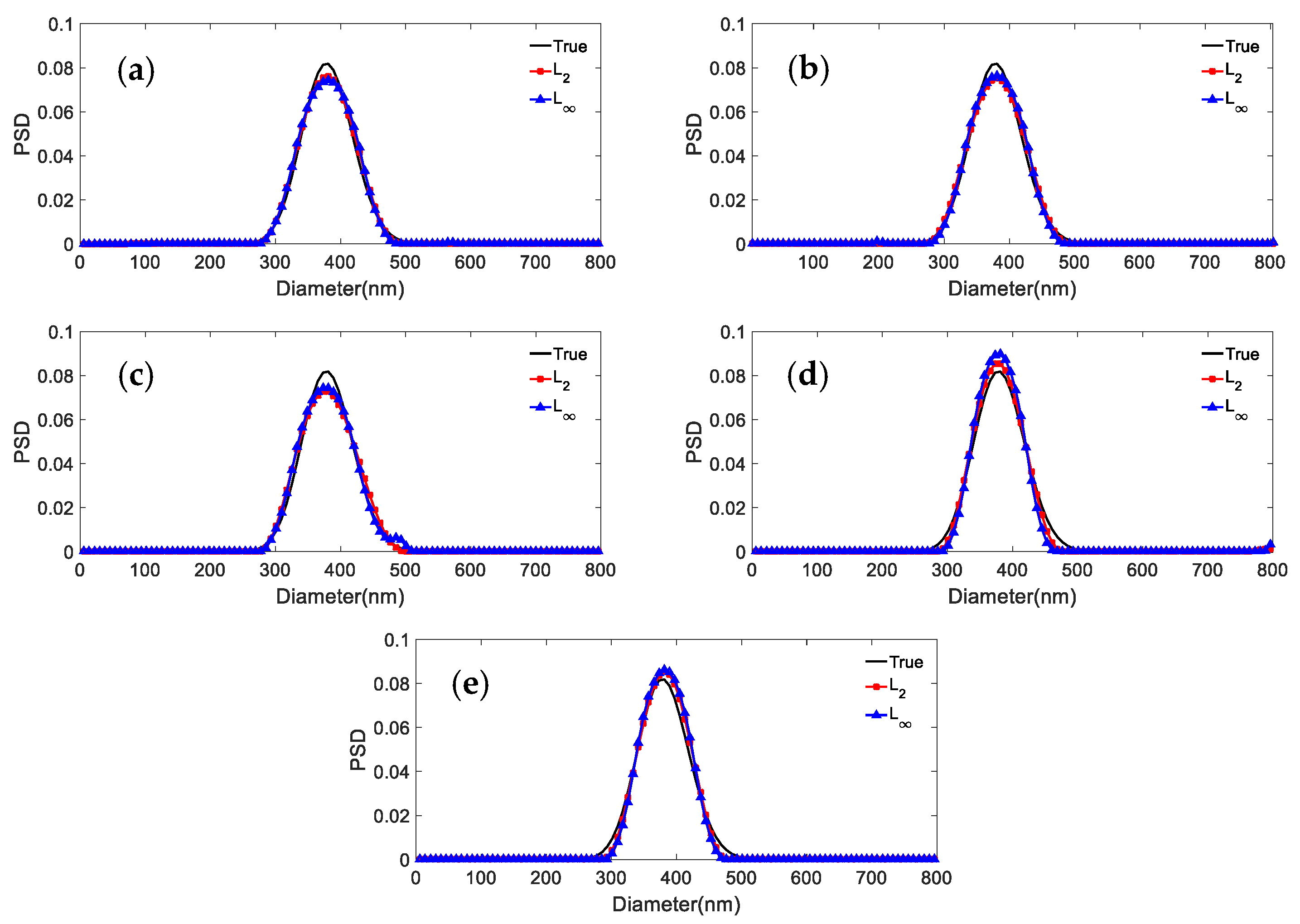
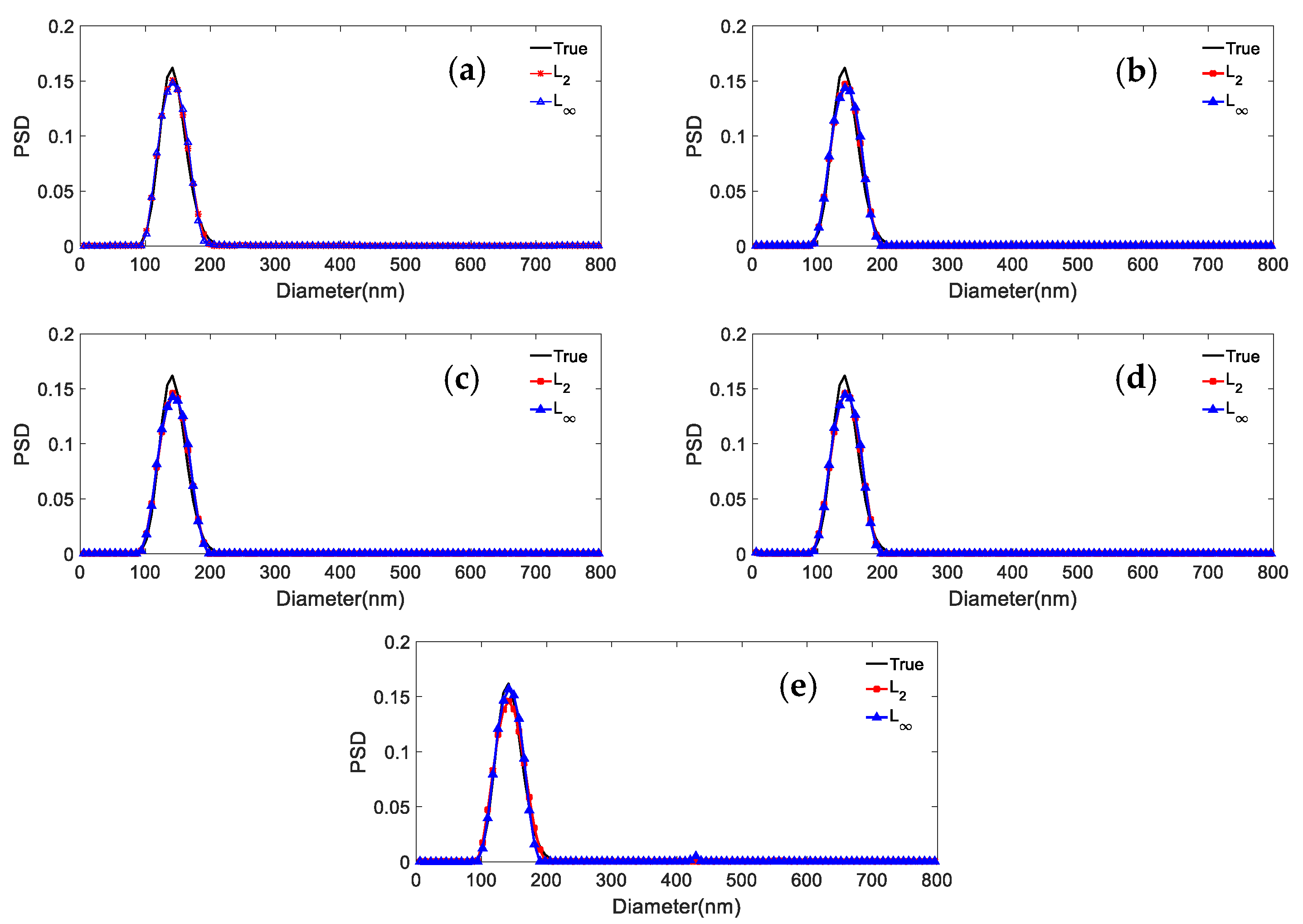
5.1. Unimodal Particles
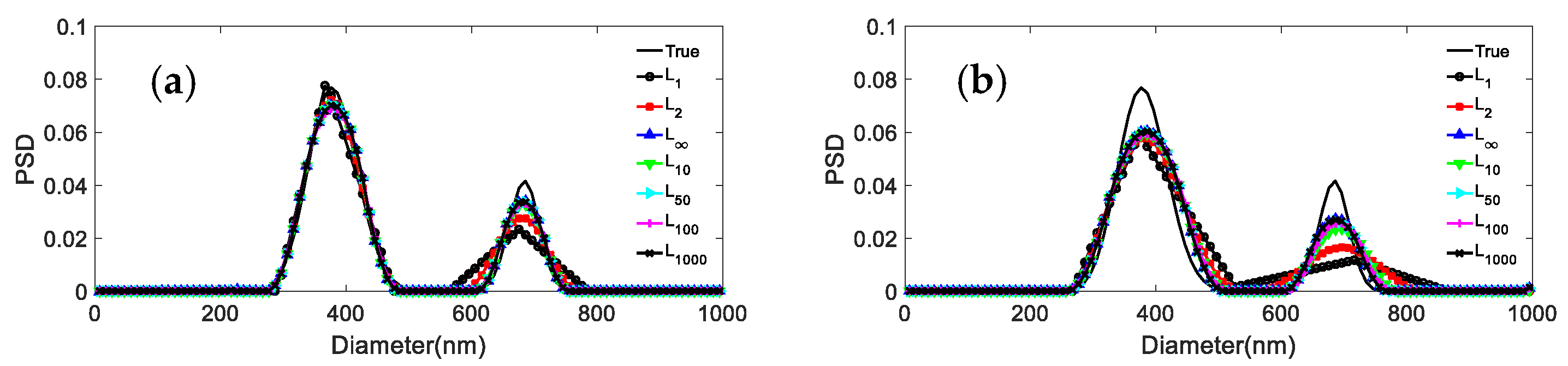
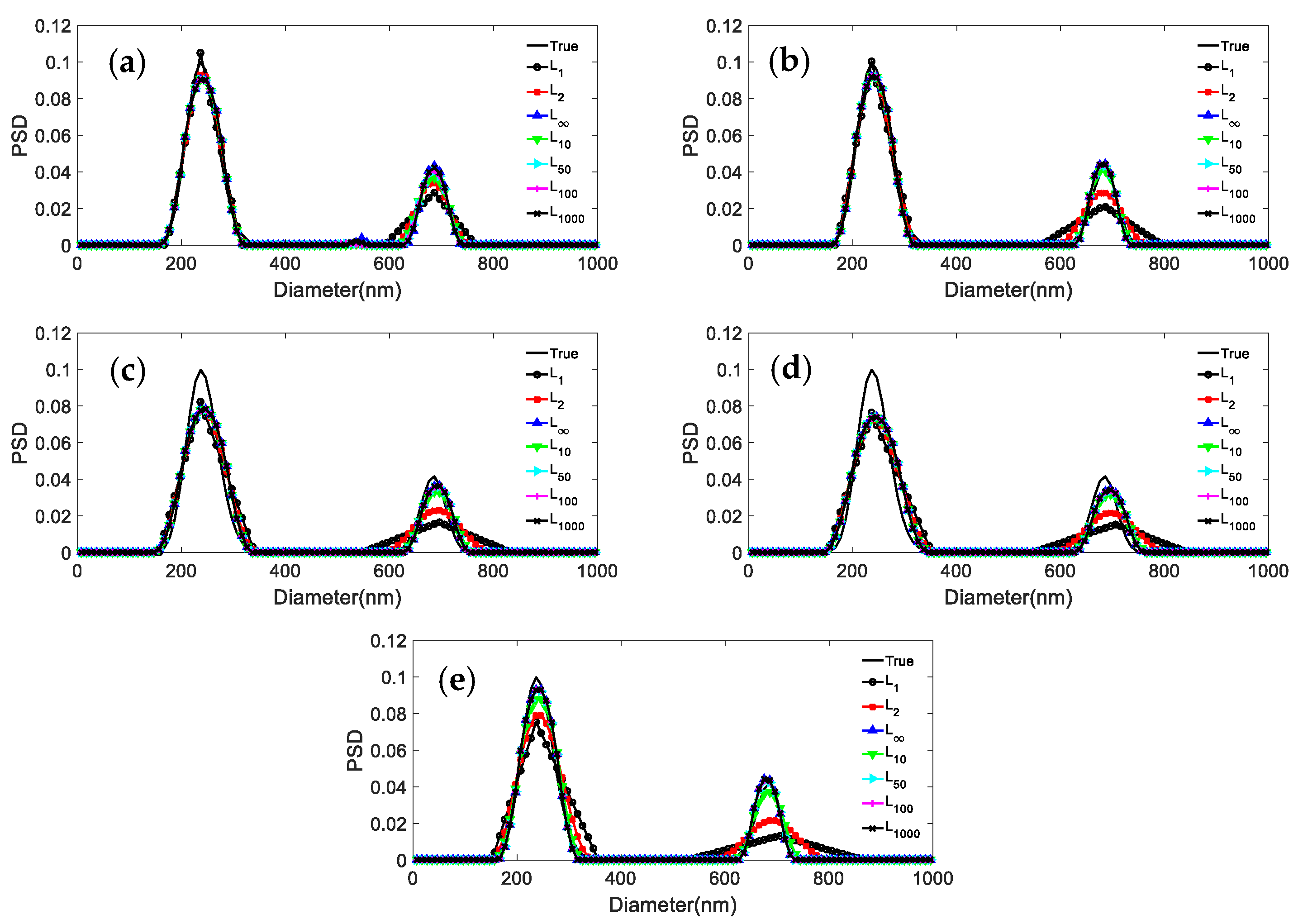
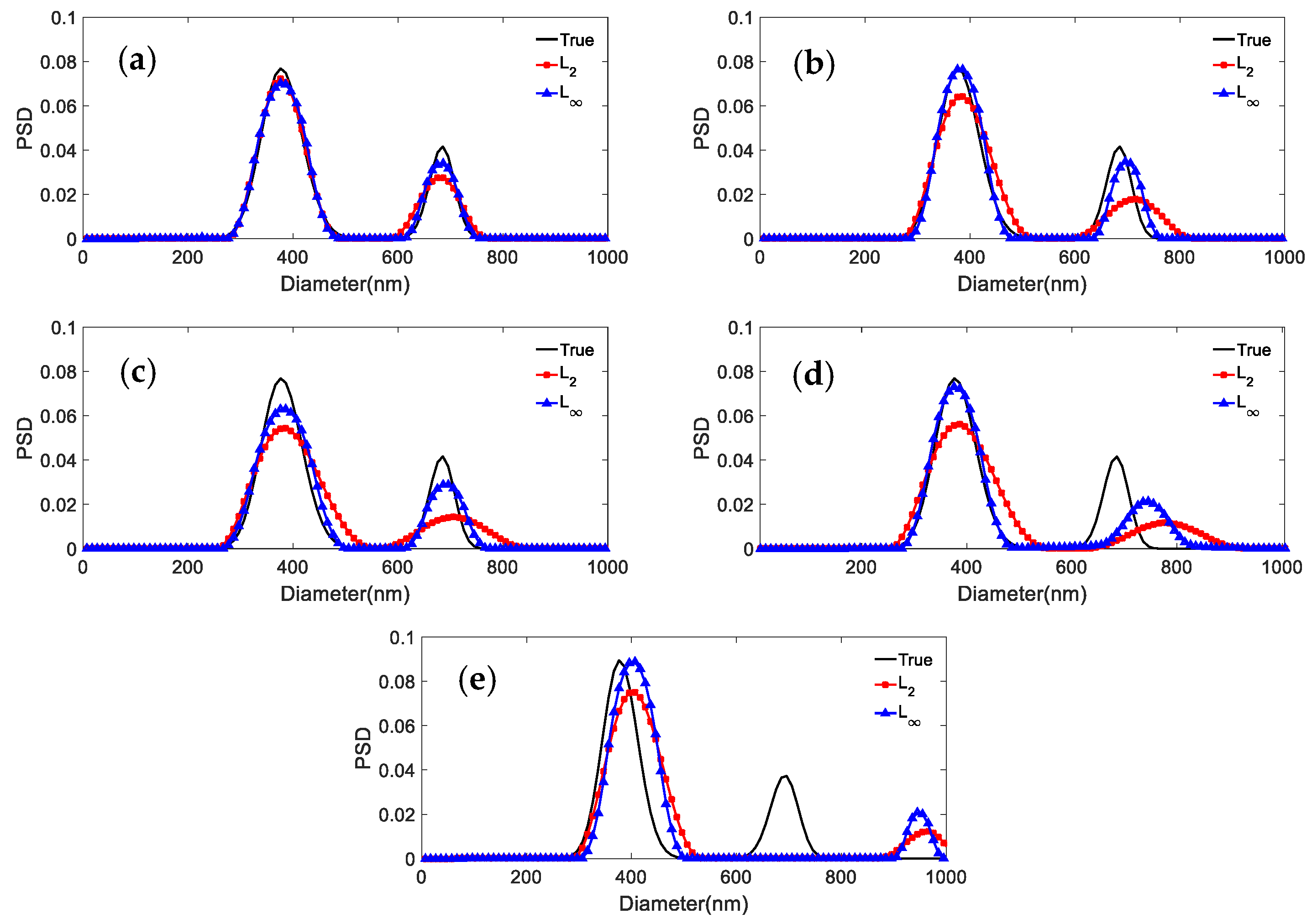
5.2. Bimodal Particles
5.3. Discussion
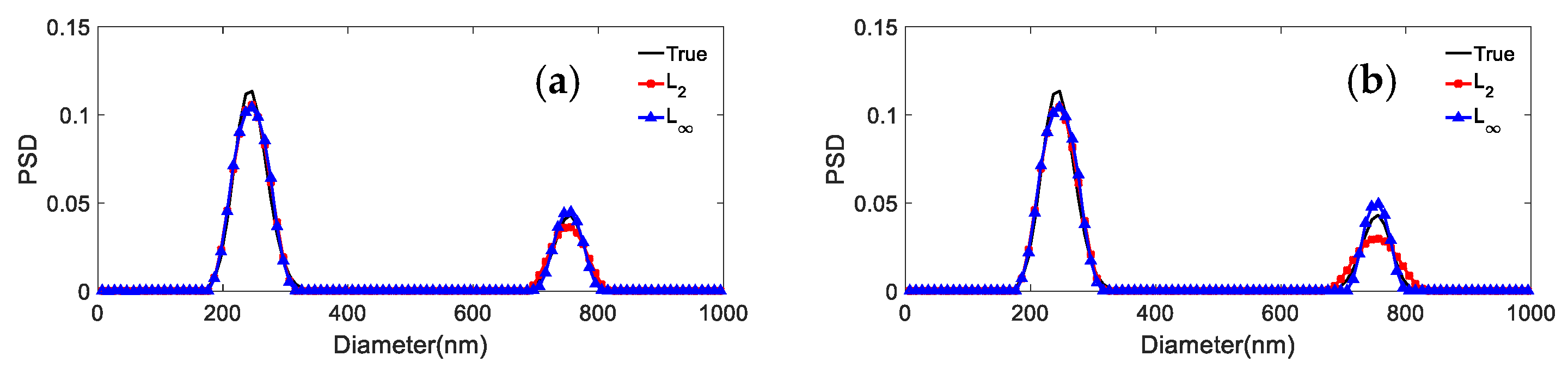
6. Experimental Data Inversion Analysis
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhu, X. Lp-norm-residual constrained regularization model for estimation of particle size distribution in dynamic light scattering. Apply Opt. 2017, 56, 5360–5368. [Google Scholar] [CrossRef]
- Wang, G. Study on Dynamic Light Scattering Technique with Simulated Detection for Nanoparticle Size Measurement. Ph.D. Thesis, Jilin University, Jilin, China, 2006. [Google Scholar]
- Zheng, P. Study on Micellization of Surfactants and Their Interactions with Polymers. Ph.D. Thesis, Lanzhou University, Lanzhou, China, 2010. [Google Scholar]
- Zhang, Y. Dynamic Light Scattering Study of Intracellular Proteins. Master’s Thesis, Chongqing University, Chongqing, China, 2013. [Google Scholar]
- Provencher, S.W. A constrained regularization method for inverting data represented by linear algebraic or integral equations. Commun. Comput. Phys. 1982, 27, 213–227. [Google Scholar] [CrossRef]
- Otsuki, A.; Dodbiba, G.; Fujita, T. Measurement of particle size distribution of silica nanoparticles by interactive force apparatus under an electric field. Adv. Powder Technol. 2010, 21, 419–423. [Google Scholar] [CrossRef]
- Otsuki, A.; De Campo, L.; Garvey, C.J.; Rehm, C. H2O/D2O Contrast Variation for Ultra-Small-Angle Neutron Scattering to Minimize Multiple Scattering Effects of Colloidal Particle Suspensions. Colloids Interfaces 2018, 37, 2. [Google Scholar] [CrossRef]
- Ross, D.A.; Dhadwal, H.S. Regularized inversion of the Laplace transform: Accuracy of analytical and discrete inversion. Part. Part. Syst. Charact. 1991, 8, 282–286. [Google Scholar] [CrossRef]
- Zhu, X.; Shen, J.; Wang, Y.; Guan, J.; Sun, X.; Wang, X. The reconstruction of particle size distributions from dynamic light scattering data using particle swarm optimization techniques with different objective functions. Opt. Laser Technol. 2011, 43, 1128–1137. [Google Scholar] [CrossRef]
- Zhu, X.; Shen, J.; Liu, W.; Sun, X.; Wang, Y. Nonnegative leastsquares truncated singular value decomposition to particle size distribution inversion from dynamic light scattering data. Appl. Opt. 2010, 49, 6591–6596. [Google Scholar] [CrossRef]
- Clementi, L.A.; Vega, J.R.; Gugliotta, L.M.; Orlande, H.R.B. A Bayesian inversion method for estimating the particle size distribution of latexes from multiangle dynamic light scattering measurements. Chemom. Intell. Lab. Syst. 2011, 107, 165–173. [Google Scholar] [CrossRef]
- Frisken, B. Revisiting the method of cumulants for the analysis of dynamic light-scattering data. Appl. Opt. 2001, 40, 4087–4091. [Google Scholar] [CrossRef]
- Roger, V.; Cottet, H.; Cipelletti, L. A new robust estimator of polydispersity from dynamic light scattering data. Anal. Chem. 2016, 88, 2630–2636. [Google Scholar] [CrossRef] [PubMed]
- Dou, Z. Filtering-Tikhonov regularization inversion for dynamic light scattering data with strong noise. Opt. Commun. 2019, 430, 407–415. [Google Scholar] [CrossRef]
- Wang, X, A Study of the Optimization Method for Count-Type Functional Responses Based on the Infinity-Norm Distance. Ind. Eng. J. 2021, 34–40, 1007–7375.
- Yu, A.B.; Standish, N. A study of particle size distribution. Powder Technol. 1990, 62, 101–118. [Google Scholar] [CrossRef]
- Morrison, I.D.; Grabowski, E.F. Improved techniques for particle size determination for quasi-elastic light scattering. Langmuir 1985, 1, 496–501. [Google Scholar] [CrossRef]
- Ostrowsky, N.; Sornette, D.; Parker, P.; Pike, E.R. Exponential sampling method for light scattering polydispersity analysis. Opt. Acta Int. J. Opt. 1981, 28, 1059–1070. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Particles | Parameters | |||||
|---|---|---|---|---|---|---|
| Dmin/nm | Dmax/nm | μ1 | μ2 | σ1 | σ2 | |
| 381.1 nm | 10 | 1000 | 3.0 | - | 9.0 | - |
| 376.3 nm/685.6 nm | 10 | 1000 | 3.0 | −3.0 | 7.0 | 7.0 |
| 236.5 nm/685.6 nm | 10 | 1000 | 7.0 | −3.0 | 7.0 | 7.0 |
| Noise | L1 | L2 | L10 | L50 | L100 | L1000 | L∞ |
|---|---|---|---|---|---|---|---|
| 0 | 0.0924 | 0.0690 | 0.0729 | 0.0756 | 0.0759 | 0.0761 | 0.0893 |
| 0.0005 | 0.0931 | 0.0702 | 0.0776 | 0.0774 | 0.0774 | 0.0772 | 0.0817 |
| 0.001 | 0.1005 | 0.0876 | 0.0960 | 0.1026 | 0.1005 | 0.1008 | 0.1033 |
| 0.005 | 0.1236 | 0.0987 | 0.0998 | 0.1021 | 0.1081 | 0.1104 | 0.1093 |
| 0.01 | 0.1457 | 0.1309 | 0.1002 | 0.1095 | 0.1109 | 0.1181 | 0.1196 |
| Noise | L1 | L2 | L10 | L50 | L100 | L1000 | L∞ |
|---|---|---|---|---|---|---|---|
| 0 | 0.3833 | 0.1764 | 0.1346 | 0.2254 | 0.2251 | 0.1250 | 0.1251 |
| 0.0005 | 0.4986 | 0.3961 | 0.2049 | 0.2073 | 0.3211 | 0.1689 | 0.1688 |
| 0.001 | 0.5592 | 0.4608 | 0.2067 | 0.1989 | 0.2004 | 0.1987 | 0.1995 |
| 0.005 | 0.5477 | 0.4826 | 0.2904 | 0.2958 | 0.2956 | 0.2442 | 0.2455 |
| 0.01 | 0.5897 | 0.5935 | 0.5650 | 0.5554 | 0.5542 | 0.5514 | 0.5451 |
| Noise | L1 | L2 | L10 | L50 | L100 | L1000 | L∞ |
|---|---|---|---|---|---|---|---|
| 0 | 0.2215 | 0.1491 | 0.1086 | 0.1052 | 0.1048 | 0.1049 | 0.1048 |
| 0.0005 | 0.3762 | 0.2695 | 0.1789 | 0.1601 | 0.1486 | 0.1557 | 0.1556 |
| 0.001 | 0.5129 | 0.3679 | 0.2145 | 0.2375 | 0.2239 | 0.2345 | 0.2343 |
| 0.005 | 0.6025 | 0.3853 | 0.2552 | 0.2399 | 0.2358 | 0.2438 | 0.2438 |
| 0.01 | 0.5964 | 0.5745 | 0.4738 | 0.4466 | 0.4333 | 0.4228 | 0.4223 |
| Noise | L1 (%) | L2 (%) | L10 (%) | L50 (%) | L100 (%) | L1000 (%) | L∞ (%) |
|---|---|---|---|---|---|---|---|
| 0 | 2.65/1.46 | 0/1.46 | 0 | 0 | 0 | 0 | 0 |
| 0.0005 | 0/1.46 | 0/1.46 | 0/1.46 | 2.63/0 | 0/1.46 | 2.63/0 | 2.63/0 |
| 0.001 | - | 0/1.46 | 2.63/1.46 | 0/1.46 | 0/1.46 | 0/1.46 | 0/1.46 |
| 0.005 | - | 0 | 0 | 0 | 2.63/0 | 0 | 0 |
| 0.01 | - | 2.63/7.28 | 0/4.38 | 0 | 0 | 0 | 0 |
| Noise | L1 (%) | L2 (%) | L10 (%) | L50 (%) | L100 (%) | L1000 (%) | L∞ (%) |
|---|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0.0005 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0.001 | 0/1.46 | 4.32/1.46 | 4.32/0 | 4.32/0 | 4.32/0 | 4.32/0 | 4.32/0 |
| 0.005 | 2.92/0 | 4.32/1.46 | 4.32/1.46 | 0/1.46 | 0/1.46 | 0/1.46 | 0/1.46 |
| 0.01 | 0/2.92 | 4.32/1.46 | 0/1.46 | 4.32/1.46 | 4.32/1.46 | 4.32/1.46 | 4.32/1.46 |
| Particles | Parameters | |||
|---|---|---|---|---|
| Dmin/nm | Dmax/nm | μ | σ | |
| 390.1 nm | 10 | 1000 | 1.0 | 9.0 |
| 150.7 nm | 10 | 1000 | 3.0 | 9.0 |
| Particles | Noise | L2 | L∞ | ||
|---|---|---|---|---|---|
| Peak Value Position/nm | Peak Value Error (%) | Peak Value Position/nm | Peak Value Error (%) | ||
| 390.1 nm | 0 | 390.1 | 0 | 390.1 | 0 |
| 0.0005 | 390.1 | 0 | 390.1 | 0 | |
| 0.001 | 390.1 | 0 | 390.1 | 0 | |
| 0.005 | 390.1 | 0 | 390.1 | 0 | |
| 0.01 | 373.1 | 4.36 | 373.1 | 4.36 | |
| 150.7 nm | 0 | 150.7 | 0 | 150.7 | 0 |
| 0.0005 | 150.7 | 0 | 150.7 | 0 | |
| 0.001 | 150.7 | 0 | 150.7 | 0 | |
| 0.005 | 150.7 | 0 | 150.7 | 0 | |
| 0.01 | 150.7 | 0 | 150.7 | 0 | |
| Noise | 390.1 nm | 150.7 nm | ||
|---|---|---|---|---|
| L2 | L∞ | L2 | L∞ | |
| 0 | 0.0690 | 0.0893 | 0.0751 | 0.0994 |
| 0.0005 | 0.0735 | 0.0928 | 0.0937 | 0.1062 |
| 0.001 | 0.0603 | 0.0787 | 0.0848 | 0.1061 |
| 0.005 | 0.0894 | 0.0962 | 0.0823 | 0.1041 |
| 0.01 | 0.1994 | 0.1652 | 0.1505 | 0.1343 |
| Particles | Parameters | |||||
|---|---|---|---|---|---|---|
| Dmin/nm | Dmax/nm | μ1 | μ2 | σ1 | σ2 | |
| 466.1 nm/655.7 nm | 10 | 1000 | 1.0 | −3.0 | 7.0 | 7.0 |
| 376.3 nm/685.6 nm | 10 | 1000 | 3.0 | −3.0 | 7.0 | 7.0 |
| 246.5 nm/755.5 nm | 10 | 1000 | 7.0 | −7.0 | 7.0 | 9.0 |
| Particles | Noise | L2 | L∞ | ||
|---|---|---|---|---|---|
| Peak Value Position/nm | Peak Value Error (%) | Peak Value Position/nm | Peak Value Error (%) | ||
| 466.1 nm/655.7 nm | 0 | 466.1/655.7 | 0 | 466.1/655.7 | 0 |
| 0.0005 | 476.1/705.6 | 2.14/7.61 | 466.1/665.7 | 0/1.53 | |
| 0.001 | 476.1/735.5 | 2.14/12.17 | 466.1/665.7 | 0/1.53 | |
| 0.005 | 476.1/- | 2.14/- | 466.1/655.7 | 0/1.53 | |
| 0.01 | 476.1/- | 2.14/- | 466.1/655.7 | 0/1.53 | |
| 376.3 nm/685.6 nm | 0 | 376.3/685.6 | 0 | 376.3/685.6 | 0 |
| 0.0005 | 386.2/715.6 | 2.63/4.38 | 376.3/695.6 | 0/1.46 | |
| 0.001 | 379.4/705.6 | 376.3/695.6 | |||
| 0.005 | 386.2/785.4 | 2.63/14.56 | 376.3/745.5 | 0/8.74 | |
| 0.01 | 406.2/965.1 | 7.95/40.77 | 406.2/945.1 | 7.95/37.85 | |
| 246.5 nm/755.5 nm | 0 | 246.5/755.5 | 0 | 246.5/755.5 | 0 |
| 0.0005 | 246.5/755.5 | 0 | 246.5/755.5 | 0 | |
| 0.001 | 246.5/755.5 | 0 | 246.5/755.5 | 0 | |
| 0.005 | 246.5/765.5 | 0 | 246.5/765.5 | 0 | |
| 0.01 | 246.5/755.5 | 1.02/2.45 | 246.5/755.5 | 0/1.32 | |
| Noise | 466.1 nm/655.7 nm | 376.3 nm/685.6 nm | 246.5 nm/755.5 nm | |||
|---|---|---|---|---|---|---|
| L2 | L∞ | L2 | L∞ | L2 | L∞ | |
| 0 | 0.1746 | 0.1251 | 0.1491 | 0.1048 | 0.1168 | 0.0968 |
| 0.0005 | 0.4565 | 0.2470 | 0.3610 | 0.1839 | 0.1952 | 0.1106 |
| 0.001 | 0.5553 | 0.3113 | 0.3588 | 0.0965 | 0.2326 | 0.1096 |
| 0.005 | 0.5327 | 0.2537 | 0.5410 | 0.3556 | 0.3876 | 0.3030 |
| 0.01 | 0.5531 | 0.4798 | 0.6218 | 0.5933 | 0.2689 | 0.1616 |
| Particles | L2 | L∞ | ||
|---|---|---|---|---|
| Peak Value Position/nm | Peak Value Error (%) | Peak Value Position/nm | Peak Value Error (%) | |
| 31 nm/203 nm | 30.63/198.7 | 1.19/2.12 | 30.63/205 | 1.19/0.99 |
| 61 nm | 60.48 | 0.85 | 60.69 | 0.51 |
| 203 nm | 205 | 0.98 | 202.5 | 0.25 |
| Particles | Peak Value Position/nm |
|---|---|
| 31 nm/203 nm | 36.58 nm/241.5 nm |
| 61 nm | 65.2 nm |
| 203 nm | 207.0 nm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Wang, Z.; Wang, Y.; Shen, J.; Liu, W.; Fu, X.; Li, C. Particle Size Inversion Constrained by L∞ Norm for Dynamic Light Scattering. Materials 2022, 15, 7111. https://doi.org/10.3390/ma15207111
Zhang G, Wang Z, Wang Y, Shen J, Liu W, Fu X, Li C. Particle Size Inversion Constrained by L∞ Norm for Dynamic Light Scattering. Materials. 2022; 15(20):7111. https://doi.org/10.3390/ma15207111
Chicago/Turabian StyleZhang, Gaoge, Zongzheng Wang, Yajing Wang, Jin Shen, Wei Liu, Xiaojun Fu, and Changzhi Li. 2022. "Particle Size Inversion Constrained by L∞ Norm for Dynamic Light Scattering" Materials 15, no. 20: 7111. https://doi.org/10.3390/ma15207111
APA StyleZhang, G., Wang, Z., Wang, Y., Shen, J., Liu, W., Fu, X., & Li, C. (2022). Particle Size Inversion Constrained by L∞ Norm for Dynamic Light Scattering. Materials, 15(20), 7111. https://doi.org/10.3390/ma15207111