
Study on Electrical Pitting Prevention Device of a Rotating Shaft Using Automatic Control Potential Balancing



Abstract
:1. Introduction
2. Experimental Setup
2.1. Principle of Prevention of Electrical Pitting
2.2. Design of Electrical Pitting Prevention Device
2.3. Experimental Setup and Test Method
3. Experimental Results
3.1. Preliminary Verification of Device Performance in Laboratory
3.2. Performance Verification for Potential Differences and Output Voltage Ripple
3.3. Validation of Anti-Corrosion Performance of Commercial Vessel Rotating Shafts
4. Conclusions
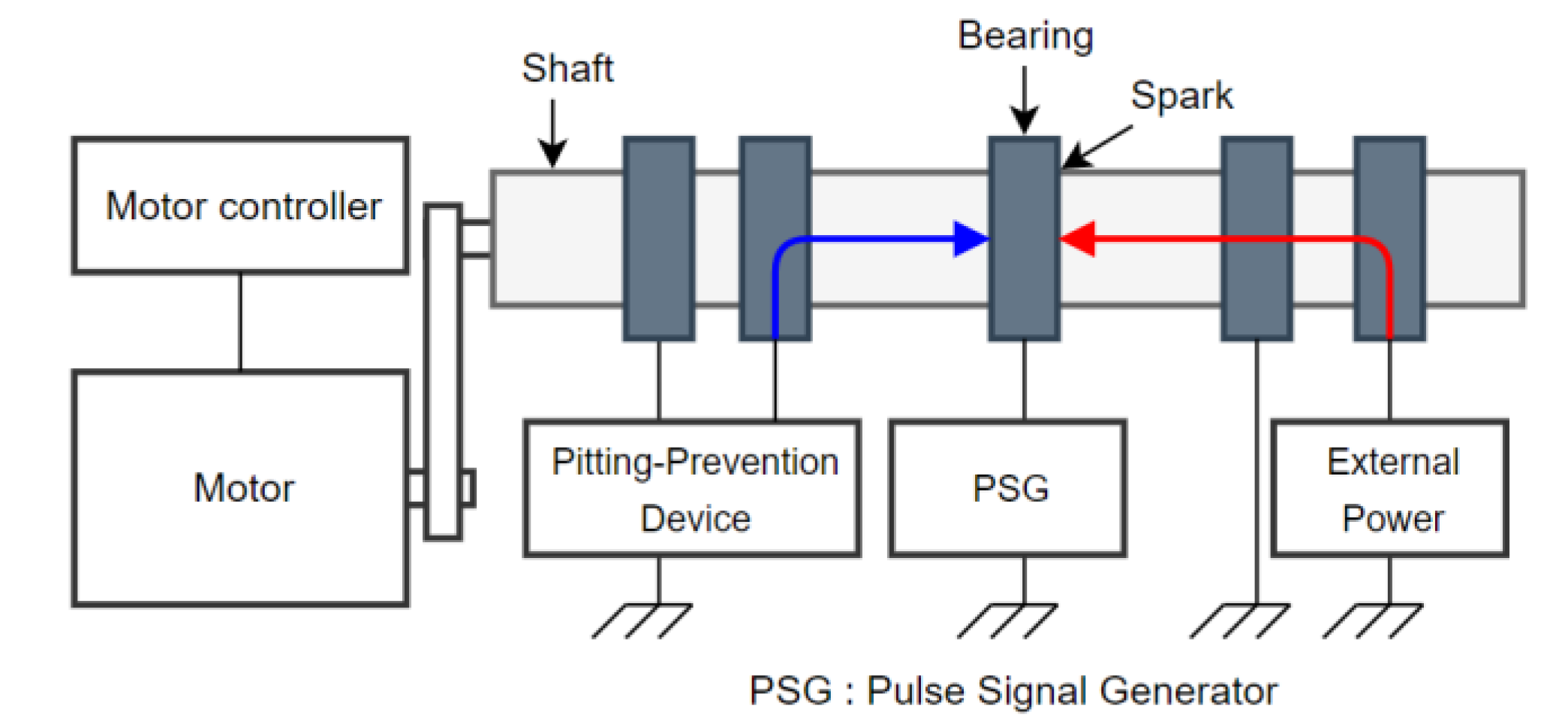
- By measuring the potential difference between the rotating shaft and the bearing, the current corresponding difference was calculated and sent to the rotating shaft, which eliminated the potential difference and prevented electrical corrosion.
- To generate and remove potential differences within a few mV in rotating machines, a potential difference detector capable of measuring at least 0.005 mV was required. In addition, smooth signals had to be provided by applying noise filters and protection circuits.
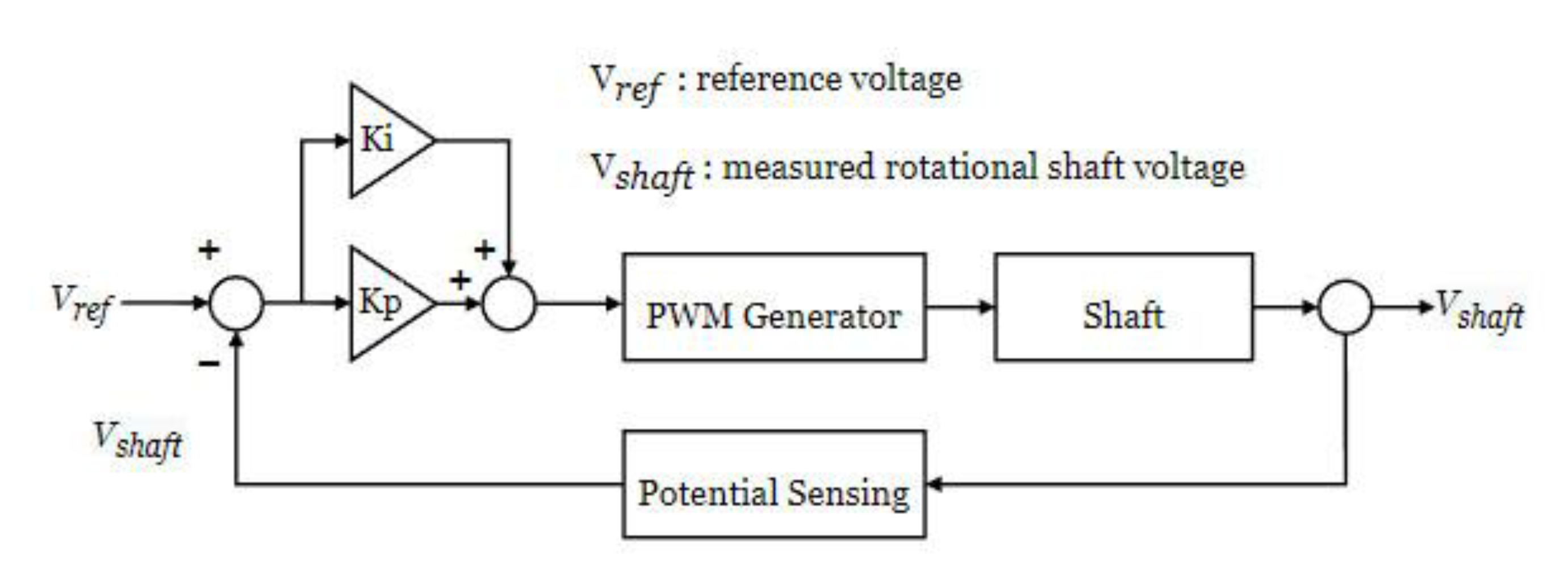
- It was necessary to apply a current-control calculation algorithm to which the PID algorithm was applied as an output current to remove the potential difference as measured by the potential difference detector as basic information.
- A power-control device, which output the current between the rotary shaft and the bearing as calculated through the control calculation algorithm, was manufactured. Noise filters and protection circuits were applied, and the focus was on maintaining precise current output.
- A rotating shaft test bench was established to check the performance and operational status of the manufactured parts or devices over time. It took into account various field conditions and is expected to be applied to other research areas of rotating shafts.
- The electrical corrosion protection device can control the potential difference of the rotating shaft within 2 mV, which means that the current-control algorithm can operate normally. In addition, it was confirmed that it exhibited superior performance compared with that of the existing shaft-grounding device.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hausberg, V.; Seinsch, H.O. Capacitively Coupled Bearing Voltages and Bearing Currents of Converter fed Induction Machines. Electr. Eng. 2000, 82, 153–162. [Google Scholar] [CrossRef]
- Busse, D.; Erdman, J.; Kerkman, R.J.; Schlegel, D.; Skibinski, G. Bearing Currents and Their Relationship to PWM Drives. IEEE Trans. Power Electron. 1997, 12, 243–252. [Google Scholar] [CrossRef] [Green Version]
- Dahl, D.; Sosnowski, D.; Schlegel, D.; Kerkman, R.J.; Pennings, M. Gear up Your Bearings. IEEE Ind. Appl. Mag. 2008, 14, 45–53. [Google Scholar] [CrossRef]
- Collin, R.; Stephens, M.; Von Jouanne, A. Development of SiC-Based Motor Drive Using Typhoon HIL 402 as System-Level Controller. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Detroit, MI, USA, 11–15 October 2020. [Google Scholar]
- Binder, A.; Muetze, A. Scaling Effects of Inverter Induced Bearing Currents in AC Machines. IEEE Trans. Ind. Appl. 2008, 44, 769–776. [Google Scholar] [CrossRef]
- Cavalcanti, M.C.; de Oliveira, K.C.; de Farias, A.M.; Neves, F.A.S.; Azevedo, G.M.S.; Camboim, F.C. Modulation Techniques to Eliminate Leakage Currents in Transformer less Three-Phase Photovoltaic Systems. IEEE Trans. Ind. Electron. 2010, 57, 1360–1368. [Google Scholar] [CrossRef]
- Cavalcanti, M.C.; Farias, A.M.; Oliveira, K.C.; Neves, F.A.S.; Afonso, J.L. Eliminating Leakage Currents in Neutral Point Clamped Inverters for Photovoltaic Systems. IEEE Trans. Ind. Electron. 2012, 59, 435–443. [Google Scholar] [CrossRef]
- Piazza, M.C.D.; Ragusa, A.; Vitale, G. Power-Loss Evaluation in CM Active EMI Filters for Bearing Current Suppression. IEEE Trans. Ind. Electron. 2011, 58, 5142–5153. [Google Scholar] [CrossRef]
- Bharatiraja, C.; Jeevananthan, S.; Munda, J.L.; Latha, R. Improved SVPWM Vector Selection Approaches in OVM Region to Reduce Common-mode Voltage for Three-Level Neutral Point Clamped Inverter. Int. J. Electr. Power Energy Syst. 2016, 79, 285–297. [Google Scholar] [CrossRef]
- Muetze, A.; Binder, A. Practical Rules for Assessment of Inverter Induced Bearing Currents in Inverter-Fed AC Motors up to 500 kW. IEEE Trans. Ind. Electron. 2007, 54, 1614–1622. [Google Scholar] [CrossRef]
- Berhausen, S.; Jarek, T. Method of Limiting Shaft Voltages in AC Electric Machines. Energies 2021, 14, 3326. [Google Scholar] [CrossRef]
- Aurelien, P.; Jose, A.D.; Hubert, R.; Vicente, C.A. Time-frequency vibration analysis for the detection of motordamages caused by bearing currents. Mech. Syst. Signal. Processing 2017, 84, 747–762. [Google Scholar]
- Zhang, L.S.; Zhao, X.J.; Chen, X.Q. Application of Spectral Analysis in Shaft Current Fault of Rolling Bearings. Metall. Power 2010, 5, 38–41. [Google Scholar]
- Haram, M.; Wang, T.; Gu, F.; Ball, A. Electrical Motor Current Signal Analysis using a Modulation Signal Bispectrum for the Fault Diagnosis of a Gearbox Downstream. J. Phys. Conf. Ser. 2012, 364, 1742–6596. [Google Scholar] [CrossRef]
- Xie, G.X.; Luo, J.B.; Guo, D.; Liu, S.H.; Li, G. Damages on the lubricated surfaces in bearings under the influence of weak electrical currents. Sci. China Technol. Sci. 2013, 56, 2979–2987. [Google Scholar] [CrossRef]
- James, R.; Kim, T.H.; Narayanan, R.M. Prognostic investigation of galvanic corrosion precursors in aircraft structures and their detection strategy. Nondestruct. Charact. Monit. Adv. Mater. 2017, 10169, 101690C. [Google Scholar]
- Bonnett, A.H. Cause and Analysis of Bearing Failures in Electrical Motors. In Proceedings of the [1992] Record of Conference Papers Industry Applications Society 39th Annual Petroleum and Chemical Industry Conference; IEEE: San Antonio, TX, USA, 1992; pp. 87–95. [Google Scholar]
- Chiou, Y.C.; Lee, R.T.; Lin, C.M. Formation criterion and mechanism of electrical pitting on the lubricated surface under A.C. electrical field. Wear 1999, 236, 62–72. [Google Scholar] [CrossRef]
- Lin, C.M.; Chiou, Y.C.; Lee, R.T. Effect of MoS2 additive on electrical pitting mechanism of lubricated surface for babbitt alloy/bearing steel pair under A.C. electric field. Wear 2004, 257, 833–842. [Google Scholar] [CrossRef]
- Chiou, Y.C.; Lee, R.T.; Lin, S.M. Formation mechanism of electrical damage on sliding lubricated contacts for steel pair under DC electric field. Wear 2009, 266, 110–118. [Google Scholar] [CrossRef]
- Zika, T.; Gebeshuber, I.C.; Buschbeck, F. Surface analysis on rolling bearings after exposure to defined electric stress. Proc. Inst. Mech. Eng. Part J. J. Eng. Tribol. 2009, 223, 787–797. [Google Scholar] [CrossRef]
- Raadnui, S.; Kleesuwan, S. Electrical pitting wear debris analysis of grease-lubricated rolling element bearings. Wear 2011, 271, 1707–1718. [Google Scholar] [CrossRef]
- Zhang, Y.Z.; Yang, Z.H.; Song, K.X.; Pang, X.J.; Shangguan, B. Triboelectric behaviors of materials under high speeds and large currents. Friction 2013, 1, 259–270. [Google Scholar] [CrossRef] [Green Version]
- Li, G.X.; Meng, J.F. Analysis on Thermal Protection Miss-Operation Caused by Imperfect Earthing of Generator. Tianjin Sci. Technol. 2016, 42, 19–24. [Google Scholar]
- Adam, W. Shaft Grounding Solves Pump Motor Failures. Am. Water Work. Assoc. 2013, 39, 22–24. [Google Scholar]
- Bharatiraja, C.; Selvaraj, R.; Chelliah, T.R.; Munda, J.L.; Tariq, M.; Maswood, A.I. Design and Implementation of Fourth Arm for Elimination of Bearing Current in NPC-MLI-Fed Induction Motor Drive. Inst. Electr. Electron. Eng. 2018, 54, 745–754. [Google Scholar] [CrossRef]
- Alger, P.L.; Samson, H.W. Shaft Currents in Electric Machines. J. Am. Inst. Electr. Eng. 1923, 42, 1325–1334. [Google Scholar] [CrossRef]
- Erdman, J.M.; Kerkman, R.J.; Schlegel, D.W.; Skibinski, G.L. Effect of PWM Inverters on AC Motor Bearing10 Currents and Shaft Voltages. IEEE Trans. Ind. Appl. 1996, 32, 250–259. [Google Scholar] [CrossRef]
- Von Jouanne, A.; Rendusara, D.A.; Enjeti, P.N.; Gray, J.W. Filtering Techniques to Minimize the Effect of Long Motor Leads on PWM Inverter-fed AC Motor Drive Systems. IEEE Trans. Ind. Appl. 1996, 32, 919–926. [Google Scholar] [CrossRef]
- Moreira, A.F.; Santos, P.M.; Lipo, T.A.; Venkataramanan, G. Filter Networks for Long Cable Drives and Their Influence on Motor Voltage Distribution and Common-Mode Currents. IEEE Trans. Ind. Electron. 2005, 52, 515–522. [Google Scholar] [CrossRef]
- Von Jouanne, A.; Enjeti, P.N. Design Considerations for an Inverter Output Filter to Mitigate the Effects of Long Motor Leads in ASD Applications. IEEE Trans. Ind. Appl. 1997, 33, 1138–1145. [Google Scholar] [CrossRef]
- Han, P.; Heins, G.; Patterson, D.; Thiele, M.; Ionel, D.M. Modeling of Bearing Voltage in Electric Machines Based on ElectroMagnetic fea and Measured Bearing Capacitance. IEEE Trans. Ind. Appl. 2021, 57, 1. [Google Scholar] [CrossRef]
- Chen, S.; Lipo, T.; Fitzgerald, D. Source of Induction Motor Bearing Currents Caused by PWM Inverters. IEEE Trans. Energy Convers. 1996, 11, 25–32. [Google Scholar] [CrossRef]
- Adabi, J.; Zare, F.; Ghosh, A.; Lorenz, R.D. Calculations of Capacitive Couplings in Induction Generators to Analyse Shaft Voltage. IET Power Electron. 2010, 3, 379–390. [Google Scholar] [CrossRef] [Green Version]
- Adabi, M.E.; Vahed, A. A Survey of Shaft Voltage Reduction Strategies for Induction Generators in Wind Energy Applications. Renew. Energy 2013, 50, 177–187. [Google Scholar] [CrossRef]
- Itoh, Y. Report on 6th ME Salon—Cathodic Protection and Shaft Grounding Report on 6th ME Salon—Cathodic Protection and Shaft Grounding. Mar. Eng. 2021, 56, 297. [Google Scholar] [CrossRef]
- Muetze, A.; Oh, H.W. Application of Static Charge Dissipation to Mitigate Electric Discharge Bearing Currents. IEEE Trans. Ind. Appl. 2008, 44, 135–143. [Google Scholar] [CrossRef]
- Ferreira, F.J.T.E.; Cistelecan, M.V.; de Almeida, A.T. Evaluation of Slot-Embedded Partial Electrostatic Shield for High-Frequency Bearing Current Mitigation in Inverter-Fed Induction Motors. IEEE Trans. Energy Convers. 2012, 27, 382–390. [Google Scholar] [CrossRef]
- Zhang, H.; von Jouanne, A.; Dai, S. A Reduced-Switch Dual-Bridge Inverter Topology for the Mitigation of Bearing Currents, EMI, and DC-Link Voltage Variations. IEEE Trans. Ind. Appl. 2001, 37, 1365–1372. [Google Scholar] [CrossRef]
- Xu, L. The Method of Ship Shaft Grounding Device Used for Anticorrosion. Journal of Wuhan Institute of Shipbuilding Technology 2011, 10, 21–25. [Google Scholar]
- Alekseev, V.G.; Leviush, A.I.; Belozor, A.N.; Akhmadov, I. Failure of Rotor Protection due to Unreliable Contact of the Relay brush and the Shaft. Am. Water Work. Assoc. 2013, 47, 146–148. [Google Scholar] [CrossRef]
- Chang, M.; Jiang, R.X.; Zhang, J.W.; Gong, S.G. Method of Reducing Ship′s Shaft-Rate Electric Field Based on ASG System. J. Nav. Univ. Eng. 2015, 2015, 64–67. [Google Scholar]
- Suzuki, Y.; Akamine, K.; Kanesaka, K.; Imazeki, M. Development of new Anti-Corrosion Method (IECOS) for Marine Steel Structures. IHI Eng. Rev. 2008, 41, 58–67. [Google Scholar]
- Kim, T.; Ahn, H.; Yoon, T.; Park, S.; Kwak, G. Design of an Active Shaft Grounding System for the Elimination of Alternating Electromagnetic Field in Vessel. J. Inf. Commun. Converg. Eng. 2015, 19, 1515–1524. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | ||||
|---|---|---|---|---|
| Min [mV] | Max [mV] | Average [mV] | Ripple [mV] | |
| 1 | 1.32 | 7.04 | 5.12 | 5.72 |
| 2 | −2.23 | 8.05 | 6.54 | 9.82 |
| 3 | 0.97 | 7.66 | 5.55 | 5.69 |
| 4 | −1.86 | 8.46 | 6.73 | 8.60 |
| 5 | 1.55 | 8.81 | 6.65 | 7.26 |
| No. | ||||
|---|---|---|---|---|
| Min [mV] | Max [mV] | Average [mV] | Ripple [mV] | |
| 1 | 0.78 | 4.74 | 3.51 | 3.96 |
| 2 | 1.53 | 4.49 | 2.56 | 2.96 |
| 3 | 1.95 | 4.21 | 3.56 | 2.26 |
| 4 | −0.12 | 4.89 | 2.95 | 5.01 |
| 5 | 0.32 | 4.51 | 3.77 | 4.19 |
| No. | ||||
|---|---|---|---|---|
| Min [mV] | Max [mV] | Average [mV] | Ripple [mV] | |
| 1 | 0.08 | 0.20 | 0.11 | 0.12 |
| 2 | 0.01 | 0.18 | 0.09 | 0.17 |
| 3 | 0.05 | 0.20 | 0.10 | 0.15 |
| 4 | −0.02 | 0.20 | 0.09 | 0.22 |
| 5 | 0.02 | 0.21 | 0.07 | 0.19 |
| Date | Prevention Pitting Device | SED | Date | Prevention Pitting Device | SED | ||
|---|---|---|---|---|---|---|---|
| mV | A | mV | mV | A | mV | ||
| 1 | 0 | 13.2 | 0.6 | 16 | 0 | 14.8 | 1.2 |
| 2 | 0 | 0 | 0 | 17 | 0 | 14.6 | 1.5 |
| 3 | 0 | 0 | 0 | 18 | 0 | 15.1 | 1 |
| 4 | 0 | 12.8 | 0.8 | 19 | 0 | 15.3 | 0.9 |
| 5 | 0 | 11.6 | 0.8 | 20 | 0 | 16.2 | 1.1 |
| 6 | 0 | 12.7 | 0.7 | 21 | 0 | 16.4 | 0.9 |
| 7 | 0 | 13.6 | 0.9 | 22 | 0 | 15.9 | 1.1 |
| 8 | 0 | 12.9 | 1.1 | 23 | 0 | 15.3 | 0.8 |
| 9 | 0 | 14.2 | 1.4 | 24 | 0 | 0 | 0 |
| 10 | 0 | 0 | 0 | 25 | 0 | 14.8 | 0.6 |
| 11 | 0 | 0 | 0 | 26 | 0 | 13.9 | 0.7 |
| 12 | 0 | 13.6 | 1.3 | 27 | 0 | 13.7 | 0.4 |
| 13 | 0 | 0 | 0 | 28 | 0 | 13.8 | 0.2 |
| 14 | 0 | 11.7 | 1 | 29 | 0 | 0 | 0 |
| 15 | 0 | 0 | 0 | 30 | 0 | 14.1 | 0.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Son, D.W.; Zhang, T.; Lee, G. Study on Electrical Pitting Prevention Device of a Rotating Shaft Using Automatic Control Potential Balancing. Materials 2022, 15, 4510. https://doi.org/10.3390/ma15134510
Son DW, Zhang T, Lee G. Study on Electrical Pitting Prevention Device of a Rotating Shaft Using Automatic Control Potential Balancing. Materials. 2022; 15(13):4510. https://doi.org/10.3390/ma15134510
Chicago/Turabian StyleSon, Dong Won, Tuo Zhang, and Geesoo Lee. 2022. "Study on Electrical Pitting Prevention Device of a Rotating Shaft Using Automatic Control Potential Balancing" Materials 15, no. 13: 4510. https://doi.org/10.3390/ma15134510
APA StyleSon, D. W., Zhang, T., & Lee, G. (2022). Study on Electrical Pitting Prevention Device of a Rotating Shaft Using Automatic Control Potential Balancing. Materials, 15(13), 4510. https://doi.org/10.3390/ma15134510