
Mechanical Properties and Deformation Mechanisms of Graphene Foams with Bi-Modal Sheet Thickness by Coarse-Grained Molecular Dynamics Simulations



Abstract
:1. Introduction
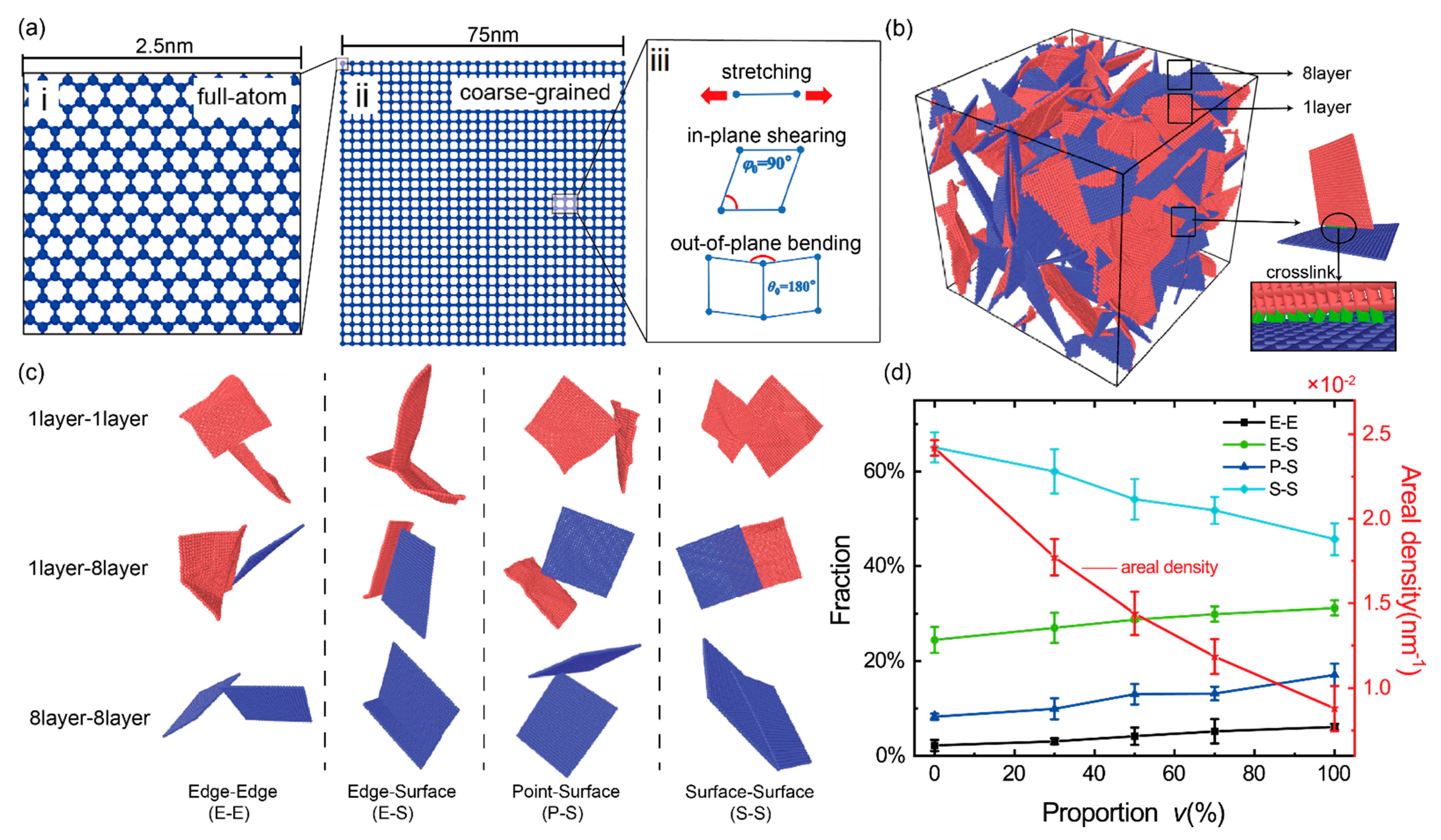
2. Numerical Model of Bi-Modal GrFs and Methodology
3. Results
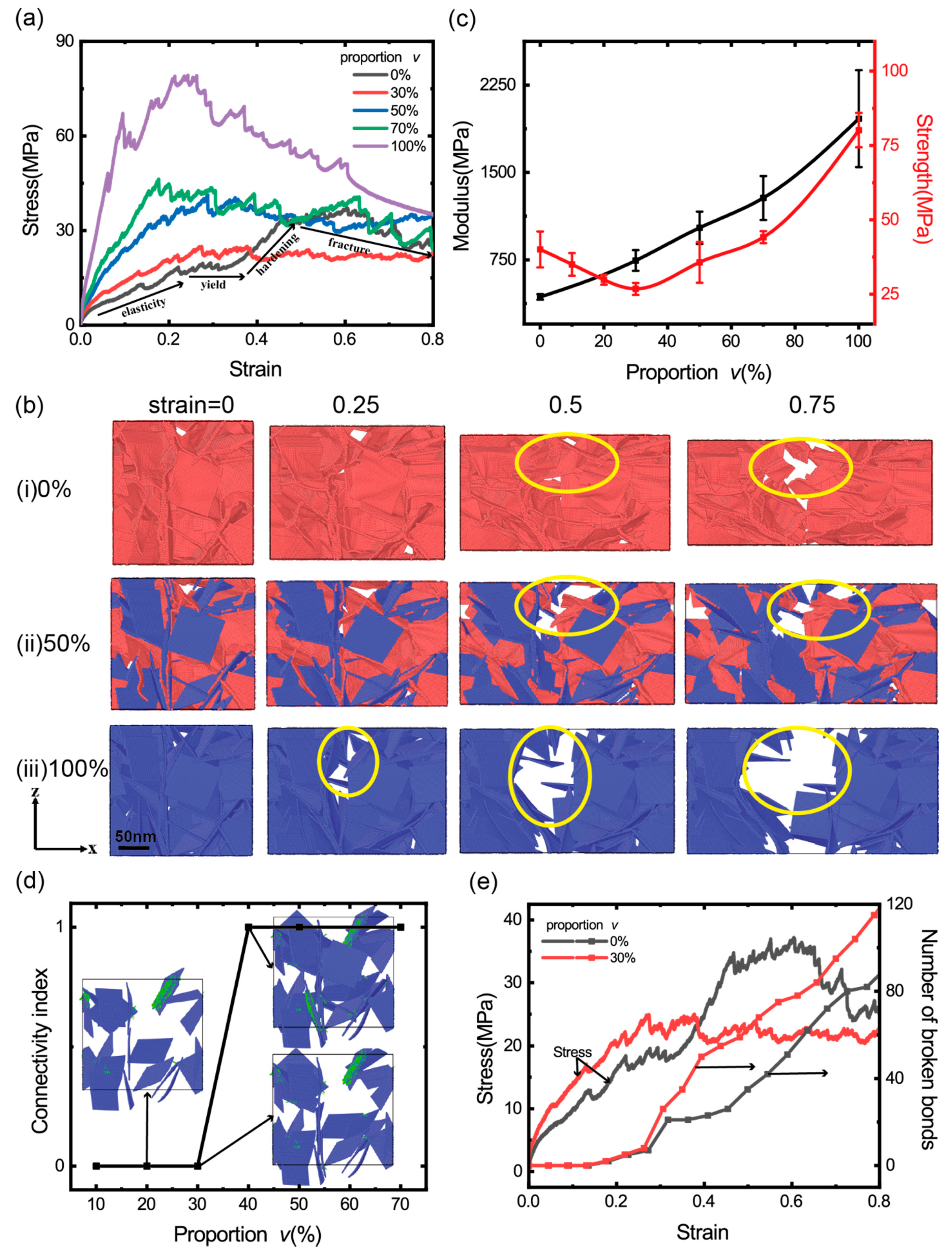
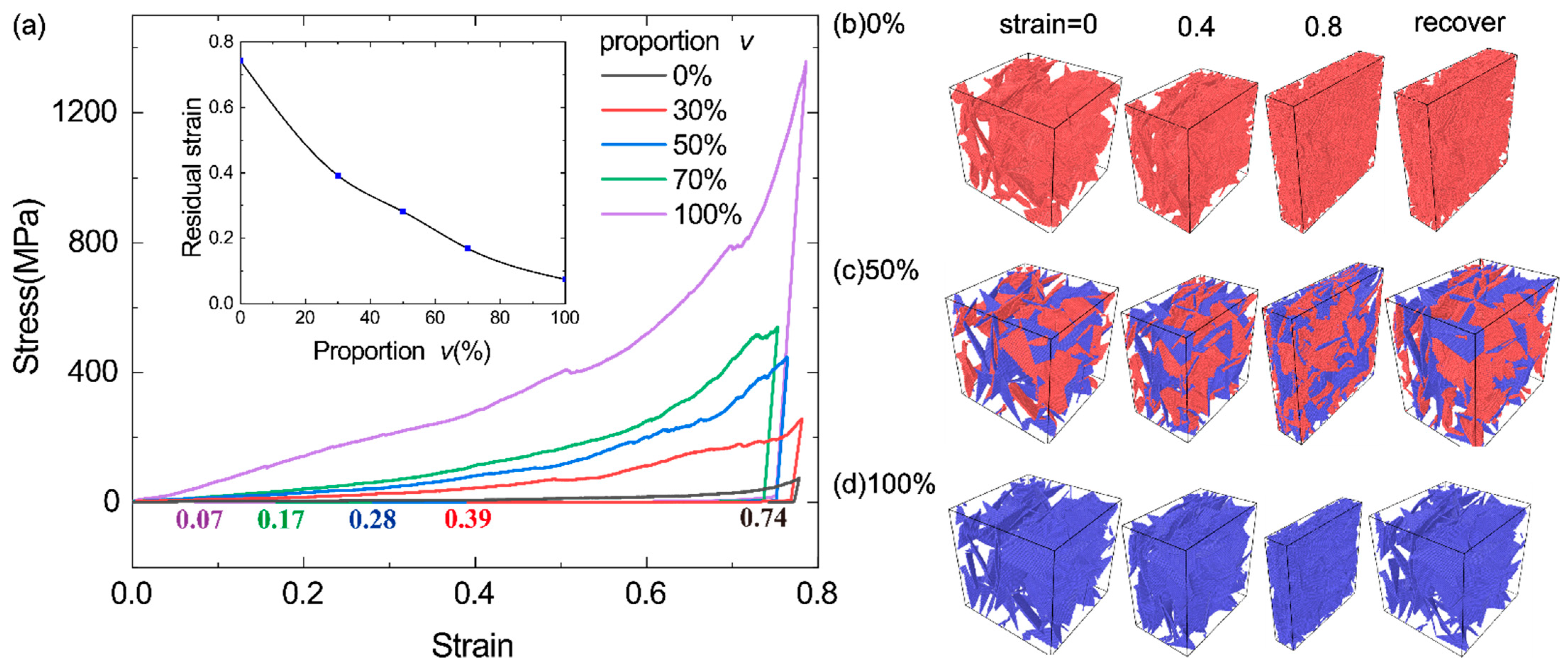
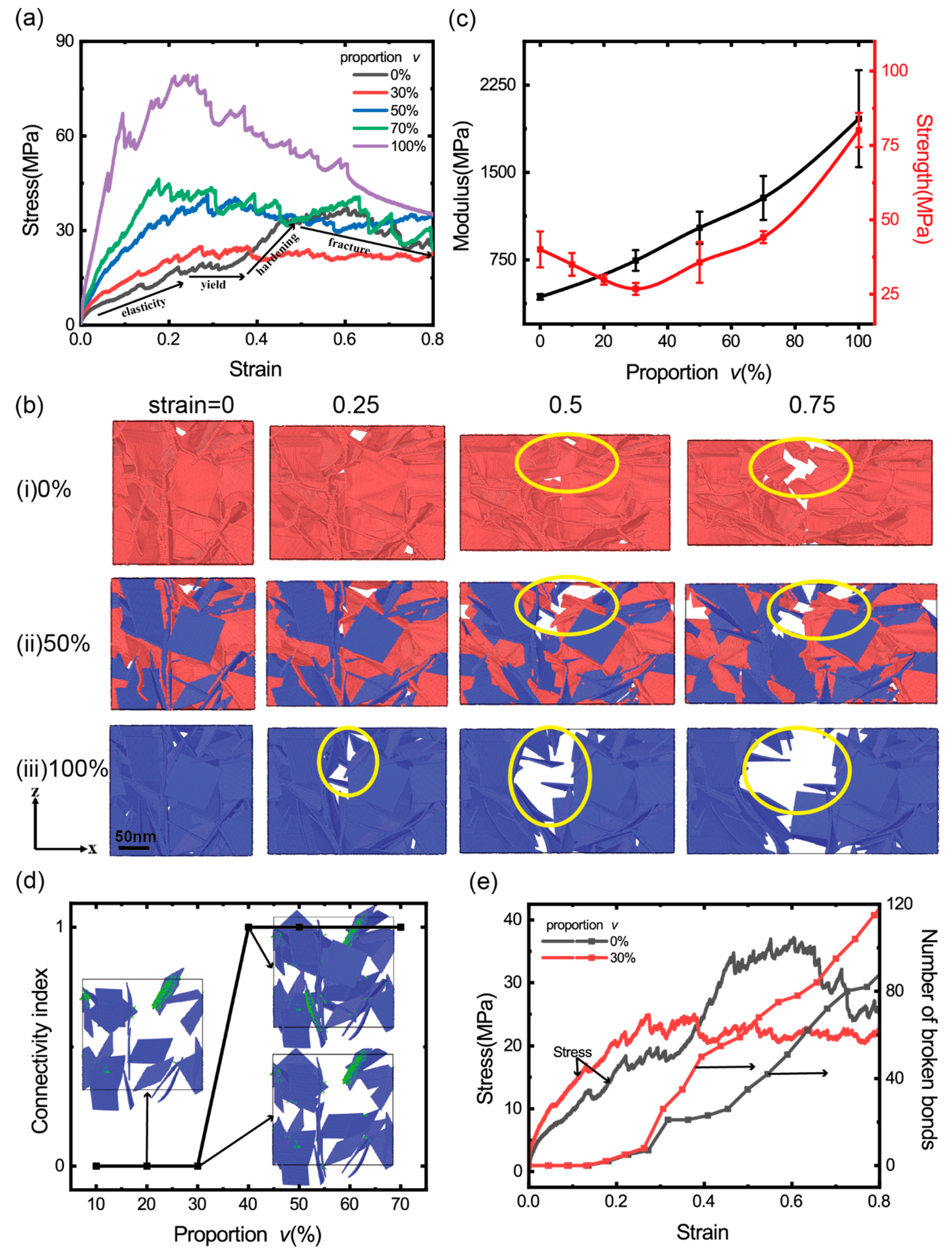
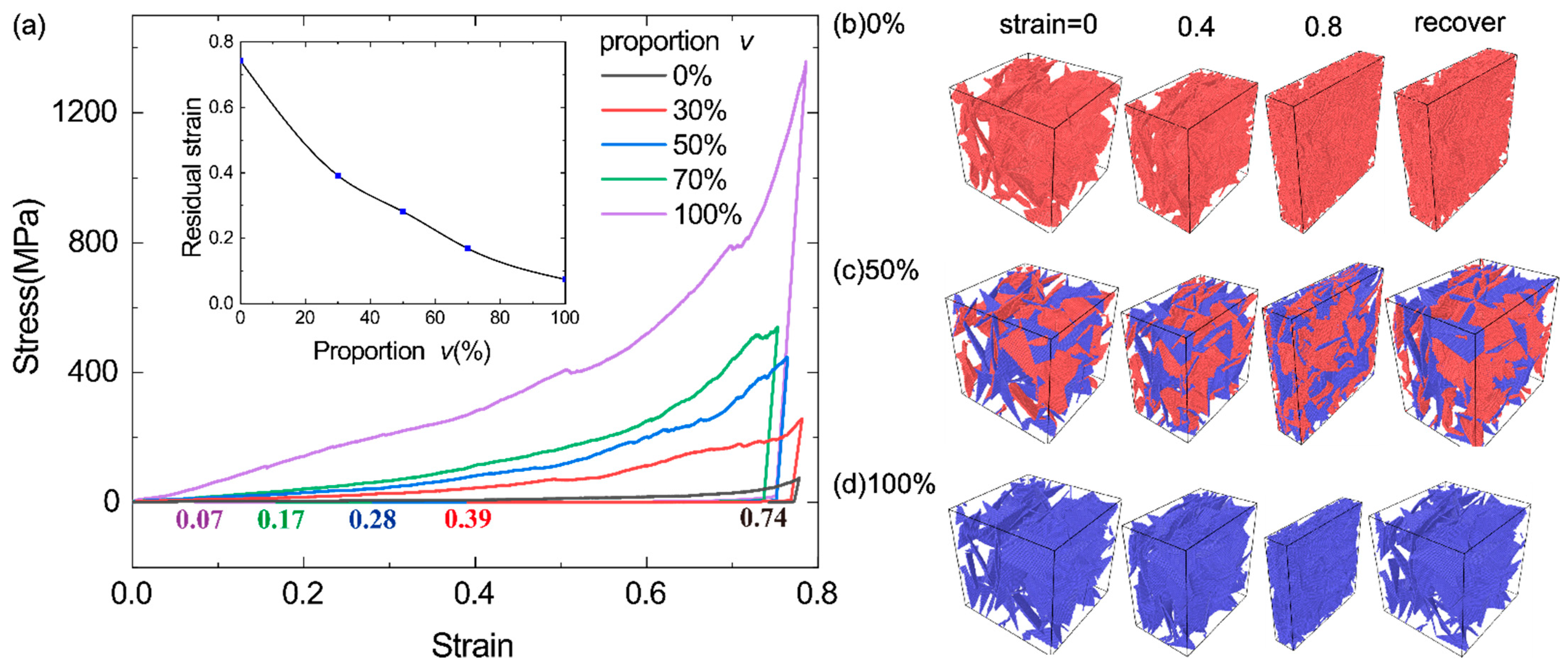
3.1. Stress–Strain Curves in Uniaxial Tension
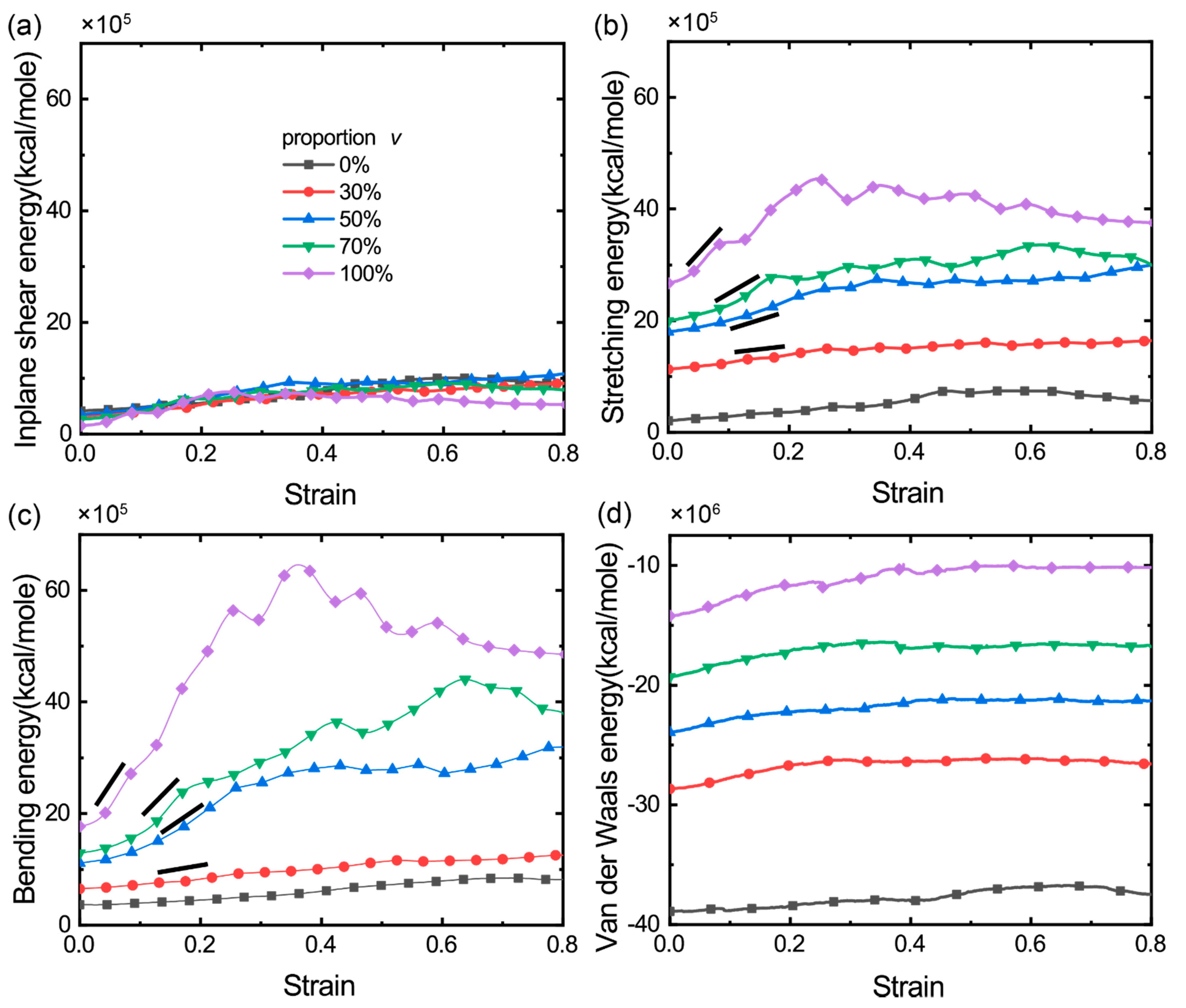
3.2. The Distribution and Evolution of Deformation Energy
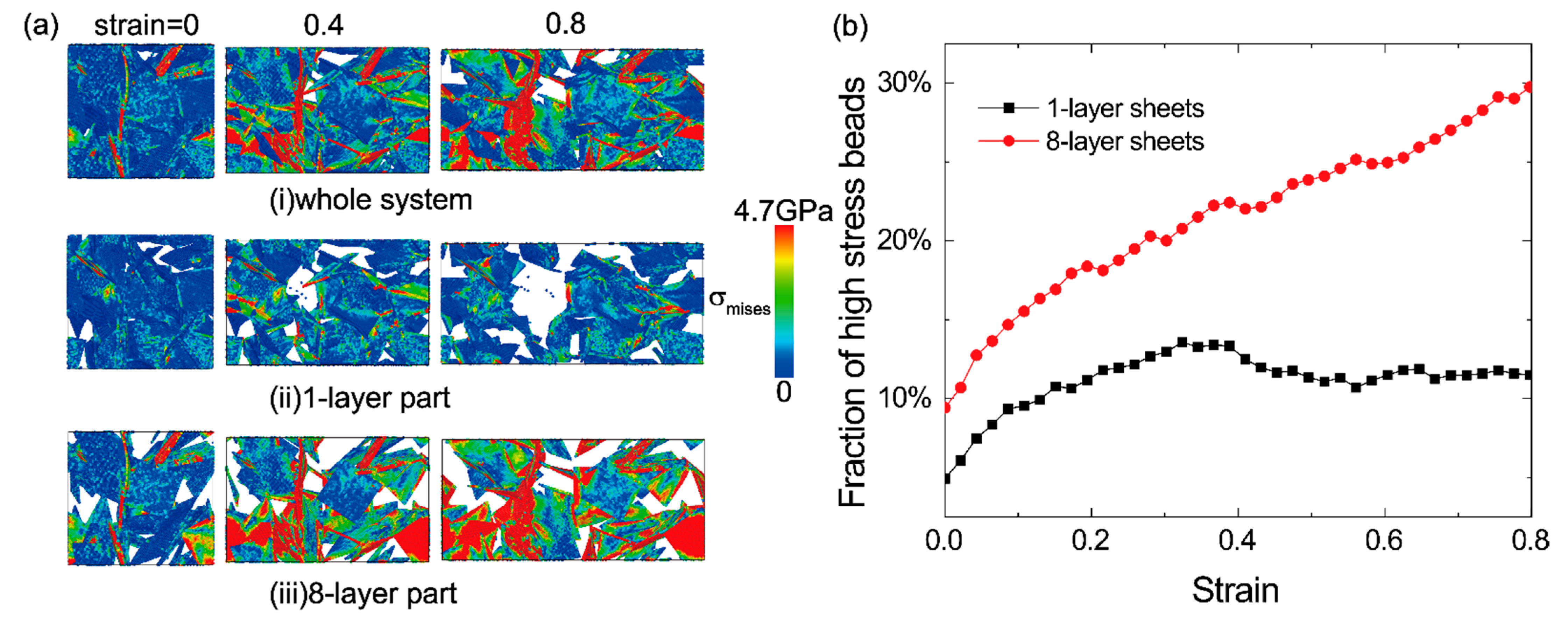
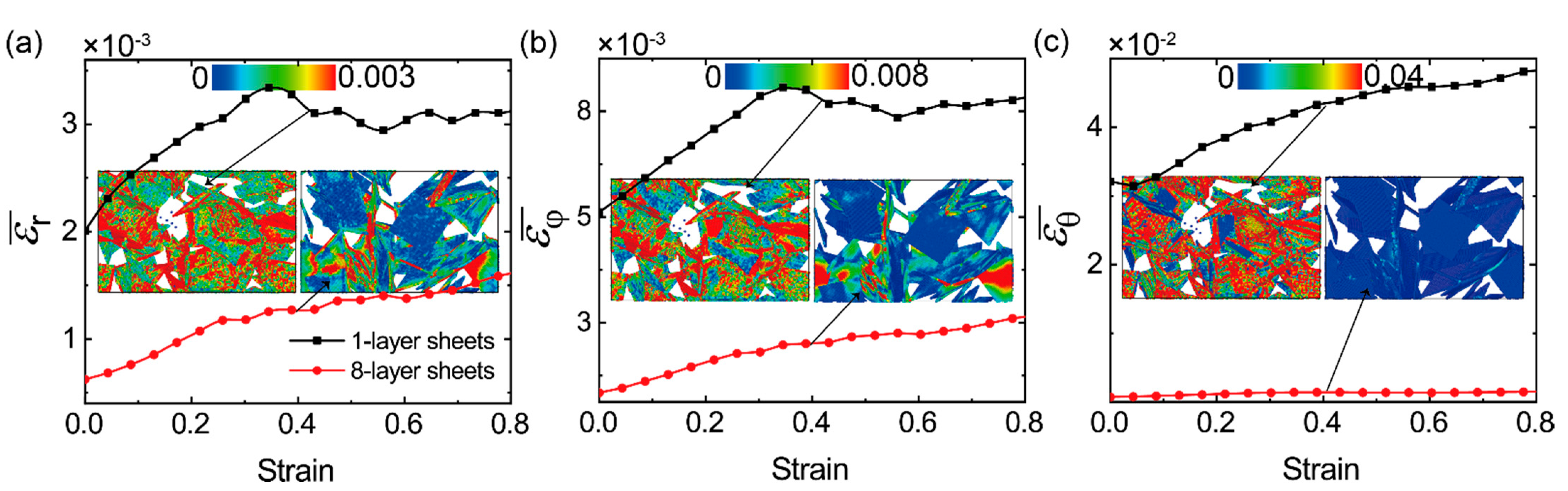
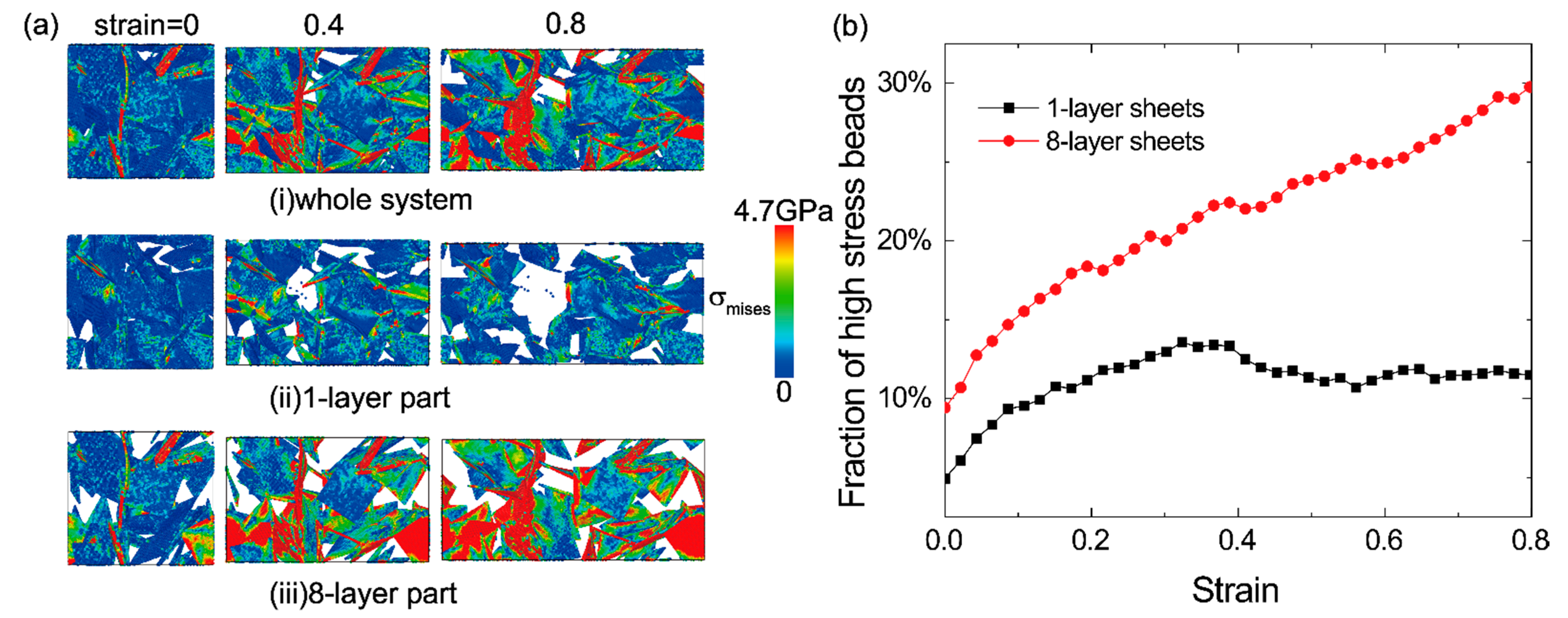
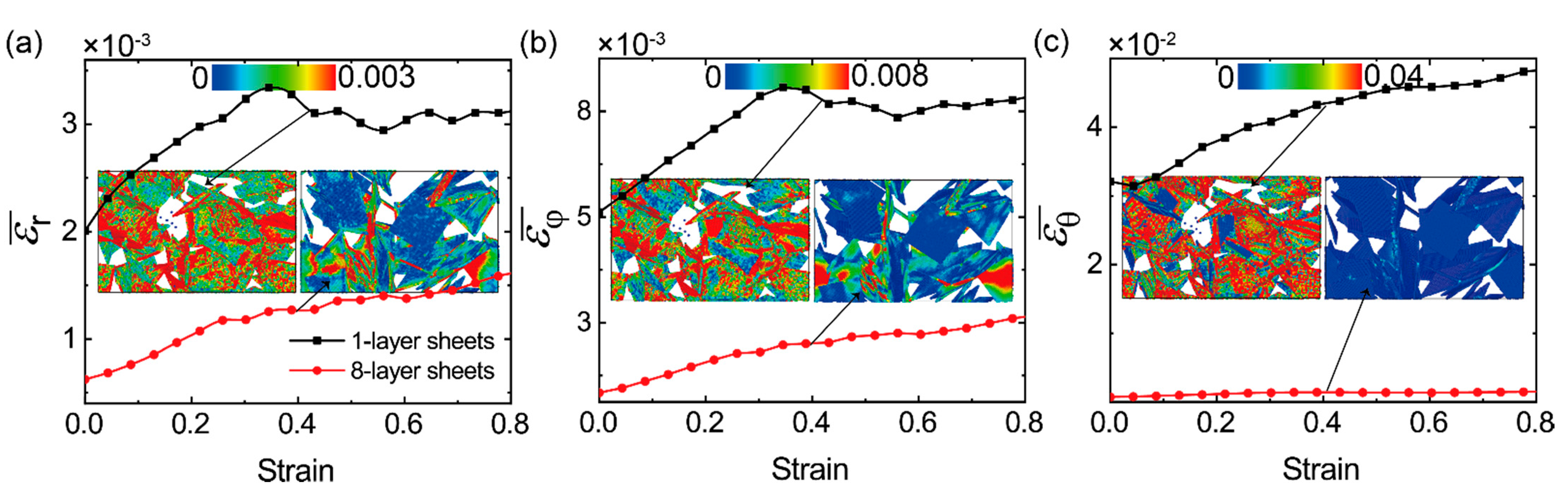
3.3. The Distribution and Evolution of Local Stress and Strain
3.4. Effect of the Proportion of Stiff Sheets on the Elastic Recovery of Bi-Modal GrFs
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Preparation of Numerical Model
References
- Sheng, L.; Wei, T.; Liang, Y.; Jiang, L.; Qu, L.; Fan, Z. Ultra-high toughness all graphene fibers derived from synergetic effect of interconnected graphene ribbons and graphene sheets. Carbon 2017, 120, 17–22. [Google Scholar] [CrossRef]
- Meng, F.; Lu, W.; Li, Q.; Byun, J.H.; Oh, Y.; Chou, T.W. Graphene-Based Fibers: A Review. Adv. Mater. 2015, 27, 5113–5131. [Google Scholar] [CrossRef] [PubMed]
- Xu, Z.; Zhang, Y.; Li, P.; Gao, C. Strong, conductive, lightweight, neat graphene aerogel fibers with aligned pores. ACS Nano 2012, 6, 7103–7113. [Google Scholar] [CrossRef]
- Xu, Z.; Sun, H.; Zhao, X.; Gao, C. Ultrastrong fibers assembled from giant graphene oxide sheets. Adv. Mater. 2013, 25, 188–193. [Google Scholar] [CrossRef]
- Zhang, L.; Alvarez, N.T.; Zhang, M.; Haase, M.; Malik, R.; Mast, D.; Shanov, V. Preparation and characterization of graphene paper for electromagnetic interference shielding. Carbon 2015, 82, 353–359. [Google Scholar] [CrossRef]
- Yavari, F.; Chen, Z.; Thomas, A.V.; Ren, W.; Cheng, H.M.; Koratkar, N. High sensitivity gas detection using a macroscopic three-dimensional graphene foam network. Sci. Rep. 2011, 1, 166. [Google Scholar] [CrossRef] [Green Version]
- Bi, H.; Xie, X.; Yin, K.; Zhou, Y.; Wan, S.; He, L.; Xu, F.; Banhart, F.; Sun, L.; Ruoff, R.S. Spongy graphene as a highly efficient and recyclable sorbent for oils and organic solvents. Adv. Funct. Mater. 2012, 22, 4421–4425. [Google Scholar] [CrossRef]
- Huang, X.; Qian, K.; Yang, J.; Zhang, J.; Li, L.; Yu, C.; Zhao, D. Functional nanoporous graphene foams with controlled pore sizes. Adv. Mater. 2012, 24, 4419–4423. [Google Scholar] [CrossRef]
- Hu, H.; Zhao, Z.; Wan, W.; Gogotsi, Y.; Qiu, J. Ultralight and highly compressible graphene aerogels. Adv. Mater. 2013, 25, 2219–2223. [Google Scholar] [CrossRef] [PubMed]
- Nieto, A.; Boesl, B.; Agarwal, A. Multi-scale intrinsic deformation mechanisms of 3D graphene foam. Carbon 2015, 85, 299–308. [Google Scholar] [CrossRef]
- Wu, Y.; Yi, N.; Huang, L.; Zhang, T.; Fang, S.; Chang, H.; Li, N.; Oh, J.; Lee, J.A.; Kozlov, M.; et al. Three-dimensionally bonded spongy graphene material with super compressive elasticity and near-zero Poisson’s ratio. Nat. Commun. 2015, 6, 6141. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Shang, L.; Cheng, Y.; Ding, H.; Zhao, Y.; Gu, Z. Microfluidic Generation of Porous Particles Encapsulating Spongy Graphene for Oil Absorption. Small 2015, 11, 3890–3895. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Zhang, F.; Medarametla, S.P.; Li, H.; Zhou, C.; Lin, D. 3D Printing of Graphene Aerogels. Small 2016, 12, 1702–1708. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; Zhang, Q.; Yu, Y.; Chen, W.; Hu, H.; Li, H. Naturally Dried Graphene Aerogels with Superelasticity and Tunable Poisson’s Ratio. Adv. Mater. 2016, 28, 9223–9230. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.; Zhao, N.; Yao, W.; Xu, Z.; Bai, H.; Gao, C. Effect of flake size on the mechanical properties of graphene aerogels prepared by freeze casting. RSC Adv. 2017, 7, 33600–33605. [Google Scholar] [CrossRef] [Green Version]
- Jung, G.S.; Buehler, M.J. Multiscale Mechanics of Triply Periodic Minimal Surfaces of Three-Dimensional Graphene Foams. Nano Lett. 2018, 18, 4845–4853. [Google Scholar] [CrossRef]
- Shao, Q.; Tang, J.; Lin, Y.; Zhang, F.; Yuan, J.; Zhang, H.; Shinya, N.; Qin, L.-C. Synthesis and characterization of graphene hollow spheres for application in supercapacitors. J. Mater. Chem. A 2013, 1, 15423–15428. [Google Scholar] [CrossRef]
- Balázsi, K.; Furkó, M.; Liao, Z.; Fogarassy, Z.; Medved, D.; Zschech, E.; Dusza, J.; Balázsi, C. Graphene added multilayer ceramic sandwich (GMCS) composites: Structure, preparation and properties. J. Eur. Ceram. Soc. 2020, 40, 4792–4798. [Google Scholar] [CrossRef]
- Ma, Y.; Chang, H.; Zhang, M.; Chen, Y. Graphene-Based Materials for Lithium-Ion Hybrid Supercapacitors. Adv. Mater. 2015, 27, 5296–5308. [Google Scholar] [CrossRef]
- Wang, X.; Lu, M.; Wang, H.; Pei, Y.; Rao, H.; Du, X. Three-dimensional graphene aerogels-mesoporous silica frameworks for superior adsorption capability of phenols. Sep. Purif. Technol. 2015, 153, 7–13. [Google Scholar] [CrossRef]
- Chen, Z.; Ren, W.; Gao, L.; Liu, B.; Pei, S.; Cheng, H.-M. Three-dimensional flexible and conductive interconnected graphene networks grown by chemical vapour deposition. Nat. Mater. 2011, 10, 424–428. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Bao, P.; Huang, X.; Sun, B.; Wang, G. Hierarchical 3D mesoporous silicon @ graphene nanoarchitectures for lithium ion batteries with superior performance. Nano Res. 2014, 7, 85–94. [Google Scholar] [CrossRef]
- Gibson, L.J.; Ashby, M.F. Cellular Solids: Structure and Properties; Cambridge University Press: Cambridge, UK, 1999; ISBN 9780521499118. [Google Scholar]
- Timoshenko, S.P.; Woinowsky-Krieger, S. Theory of Plates and Shells; McGraw-Hill College: London, UK, 1959; ISBN 9780070647794. [Google Scholar]
- Wang, G.; Dai, Z.; Xiao, J.; Feng, S.Z.; Weng, C.; Liu, L.; Xu, Z.; Huang, R.; Zhang, Z. Bending of Multilayer van der Waals Materials. Phys. Rev. Lett. 2019, 123, 116101. [Google Scholar] [CrossRef] [PubMed]
- Liu, F.; Wang, C.; Tang, Q. Conductivity Maximum in 3D Graphene Foams. Small 2018, 14, 1801458. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Zhang, C.; Chen, S. Micro-mechanism and influencing factors of graphene foam elasticity. Carbon 2019, 148, 267–276. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, C.; Chen, S. The microscopic deformation mechanism of 3D graphene foam materials under uniaxial compression. Carbon 2016, 109, 666–672. [Google Scholar] [CrossRef] [Green Version]
- Chae, S.J.; Güneş, F.; Kim, K.K.; Kim, E.S.; Han, G.H.; Kim, S.M.; Shin, H.; Yoon, S.M.; Choi, J.Y.; Park, M.H.; et al. Synthesis of large-area graphene layers on poly-nickel substrate by chemical vapor deposition: Wrinkle formation. Adv. Mater. 2009, 21, 2328–2333. [Google Scholar] [CrossRef]
- Qin, S.Y.; Liu, X.J.; Zhuo, R.X.; Zhang, X.Z. Microstructure-controllable graphene oxide hydrogel film based on a PH-responsive graphene oxide hydrogel. Macromol. Chem. Phys. 2012, 213, 2044–2051. [Google Scholar] [CrossRef]
- Xu, Y.; Sheng, K.; Li, C.; Shi, G. Self-assembled graphene hydrogel via a one-step hydrothermal process. ACS Nano 2010, 4, 4324–4330. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Hu, C.; Hu, Y.; Cheng, H.; Shi, G.; Qu, L. A versatile, ultralight, nitrogen-doped graphene framework. Angew. Chem.-Int. Ed. 2012, 51, 11371–11375. [Google Scholar] [CrossRef]
- Yu, M.; Huang, Y.; Li, C.; Zeng, Y.; Wang, W.; Li, Y.; Fang, P.; Lu, X.; Tong, Y. Building three-dimensional graphene frameworks for energy storage and catalysis. Adv. Funct. Mater. 2015, 25, 324–330. [Google Scholar] [CrossRef]
- Lee, C.; Li, Q.; Kalb, W.; Liu, X.Z.; Berger, H.; Carpick, R.W.; Hone, J. Frictional characteristics of atomically thin sheets. Science 2010, 328, 76–80. [Google Scholar] [CrossRef] [Green Version]
- Baimova, J.A.; Rysaeva, L.K.; Liu, B.; Dmitriev, S.V.; Zhou, K. From flat graphene to bulk carbon nanostructures. Phys. Status Solidi 2015, 252, 1502–1507. [Google Scholar] [CrossRef]
- Patil, S.P.; Shendye, P.; Markert, B. Molecular Investigation of Mechanical Properties and Fracture Behavior of Graphene Aerogel. J. Phys. Chem. B 2020, 124, 6132–6139. [Google Scholar] [CrossRef]
- Qin, Z.; Jung, G.S.; Kang, M.J.; Buehler, M.J. The mechanics and design of a lightweight three-dimensional graphene assembly. Sci. Adv. 2017, 3, e1601536. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Zhong, L.; Mateos, A.; Kudo, A.; Vyatskikh, A.; Gao, H.; Greer, J.R.; Li, X. Theoretical strength and rubber-like behaviour in micro-sized pyrolytic carbon. Nat. Nanotechnol. 2019, 14, 762–769. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Duan, K.; Li, L.; Wang, X.; Hu, Y. A multilayer coarse-grained molecular dynamics model for mechanical analysis of mesoscale graphene structures. Carbon 2021, 178, 528–539. [Google Scholar] [CrossRef]
- Shang, J.J.; Yang, Q.S.; Liu, X.; Wang, C. Compressive deformation mechanism of honeycomb-like graphene aerogels. Carbon 2018, 134, 398–410. [Google Scholar] [CrossRef] [Green Version]
- Shen, Z.; Ye, H.; Zhou, C.; Kröger, M.; Li, Y. Size of graphene sheets determines the structural and mechanical properties of 3D graphene foams. Nanotechnology 2018, 29, 104001. [Google Scholar] [CrossRef] [PubMed]
- Xia, W.; Vargas-Lara, F.; Keten, S.; Douglas, J.F. Structure and Dynamics of a Graphene Melt. ACS Nano 2018, 12, 5427–5435. [Google Scholar] [CrossRef] [PubMed]
- Mahdavi, S.M.; Adibnazari, S.; del Monte, F.; Gutiérrez, M.C. Compressive modulus and deformation mechanisms of 3DG foams: Experimental investigation and multiscale modeling. Nanotechnology 2021, 32, 485711. [Google Scholar] [CrossRef]
- Cranford, S.; Buehler, M.J. Twisted and coiled ultralong multilayer graphene ribbons. Model. Simul. Mater. Sci. Eng. 2011, 19, 54003. [Google Scholar] [CrossRef]
- Titov, A.V.; Král, P.; Pearson, R. Sandwiched Graphene−Membrane Superstructures. ACS Nano 2010, 4, 229–234. [Google Scholar] [CrossRef] [PubMed]
- Pan, D.; Wang, C.; Wang, T.C.; Yao, Y. Graphene Foam: Uniaxial Tension Behavior and Fracture Mode Based on a Mesoscopic Model. ACS Nano 2017, 11, 8988–8997. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Pan, D.; Chen, S. Energy dissipative mechanism of graphene foam materials. Carbon 2018, 132, 641–650. [Google Scholar] [CrossRef] [Green Version]
- Bi, H.; Chen, I.W.; Lin, T.; Huang, F. A New Tubular Graphene Form of a Tetrahedrally Connected Cellular Structure. Adv. Mater. 2015, 27, 5943–5949. [Google Scholar] [CrossRef] [PubMed]
- Yang, T.; Wang, C.; Wu, Z. Crosslink-tuned large-deformation behavior and fracture mode in buckypapers. Carbon 2020, 159, 412–421. [Google Scholar] [CrossRef]
- Wang, C.; Wang, L.; Xu, Z. Enhanced mechanical properties of carbon nanotube networks by mobile and discrete binders. Carbon 2013, 64, 237–244. [Google Scholar] [CrossRef]
- Zhang, Y.Y.; Gu, Y.T. Mechanical properties of graphene: Effects of layer number, temperature and isotope. Comput. Mater. Sci. 2013, 71, 197–200. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Li, X.; Gao, H. Fracture of graphene: A review. Int. J. Fract. 2015, 196, 1–31. [Google Scholar] [CrossRef]
- Plimpton, S. Fast parallel algorithms for short-range molecular dynamics. J. Comput. Phys. 1995, 117, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Stukowski, A. Visualization and analysis of atomistic simulation data with OVITO-the Open Visualization Tool. Model. Simul. Mater. Sci. Eng. 2010, 18, 015012. [Google Scholar] [CrossRef]
- Callister, W.D., Jr. Materials Science and Engineering: An Introduction; John Wiley & Sons Inc.: Hoboken, NJ, USA, 1999; ISBN 9780471320135. [Google Scholar]
- Nautiyal, P.; Boesl, B.; Agarwal, A. The mechanics of energy dissipation in a three-dimensional graphene foam with macroporous architecture. Carbon 2018, 132, 59–64. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. of Graphene Layers | |||
|---|---|---|---|
| Parameter | 1 | 8 | Units |
| 235 | 1860 | kcal mol−1 Å−2 | |
| 1860 | 1860 | kcal mol−1 Å−2 | |
| 25 | 25 | Å | |
| 8435 | 67,480 | kcal mol−1 rad−2 | |
| 90° | 90° | —— | |
| 72.45 | 466,543.5 | kcal mol−1 rad−2 | |
| 180° | 180° | —— | |
| 473 | 473 | kcal mol−1 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, S.; Lyu, M.; Wang, C. Mechanical Properties and Deformation Mechanisms of Graphene Foams with Bi-Modal Sheet Thickness by Coarse-Grained Molecular Dynamics Simulations. Materials 2021, 14, 5622. https://doi.org/10.3390/ma14195622
Liu S, Lyu M, Wang C. Mechanical Properties and Deformation Mechanisms of Graphene Foams with Bi-Modal Sheet Thickness by Coarse-Grained Molecular Dynamics Simulations. Materials. 2021; 14(19):5622. https://doi.org/10.3390/ma14195622
Chicago/Turabian StyleLiu, Shenggui, Mindong Lyu, and Chao Wang. 2021. "Mechanical Properties and Deformation Mechanisms of Graphene Foams with Bi-Modal Sheet Thickness by Coarse-Grained Molecular Dynamics Simulations" Materials 14, no. 19: 5622. https://doi.org/10.3390/ma14195622
APA StyleLiu, S., Lyu, M., & Wang, C. (2021). Mechanical Properties and Deformation Mechanisms of Graphene Foams with Bi-Modal Sheet Thickness by Coarse-Grained Molecular Dynamics Simulations. Materials, 14(19), 5622. https://doi.org/10.3390/ma14195622