
Predicting Nonlinear and Anisotropic Mechanics of Metal Rubber Using a Combination of Constitutive Modeling, Machine Learning, and Finite Element Analysis

Abstract
:1. Introduction
2. Materials and Methods
2.1. Mechanical Properties of MR
2.1.1. Anisotropy of MR
2.1.2. Nonlinearity of MR
2.2. Current Elastic Modulus of MR
2.3. Principle of the Constitutive Model
2.4. Machine Learning Methodology
3. Results and Discussion
3.1. ANN Model Training Results
3.2. Validity of ANN Model
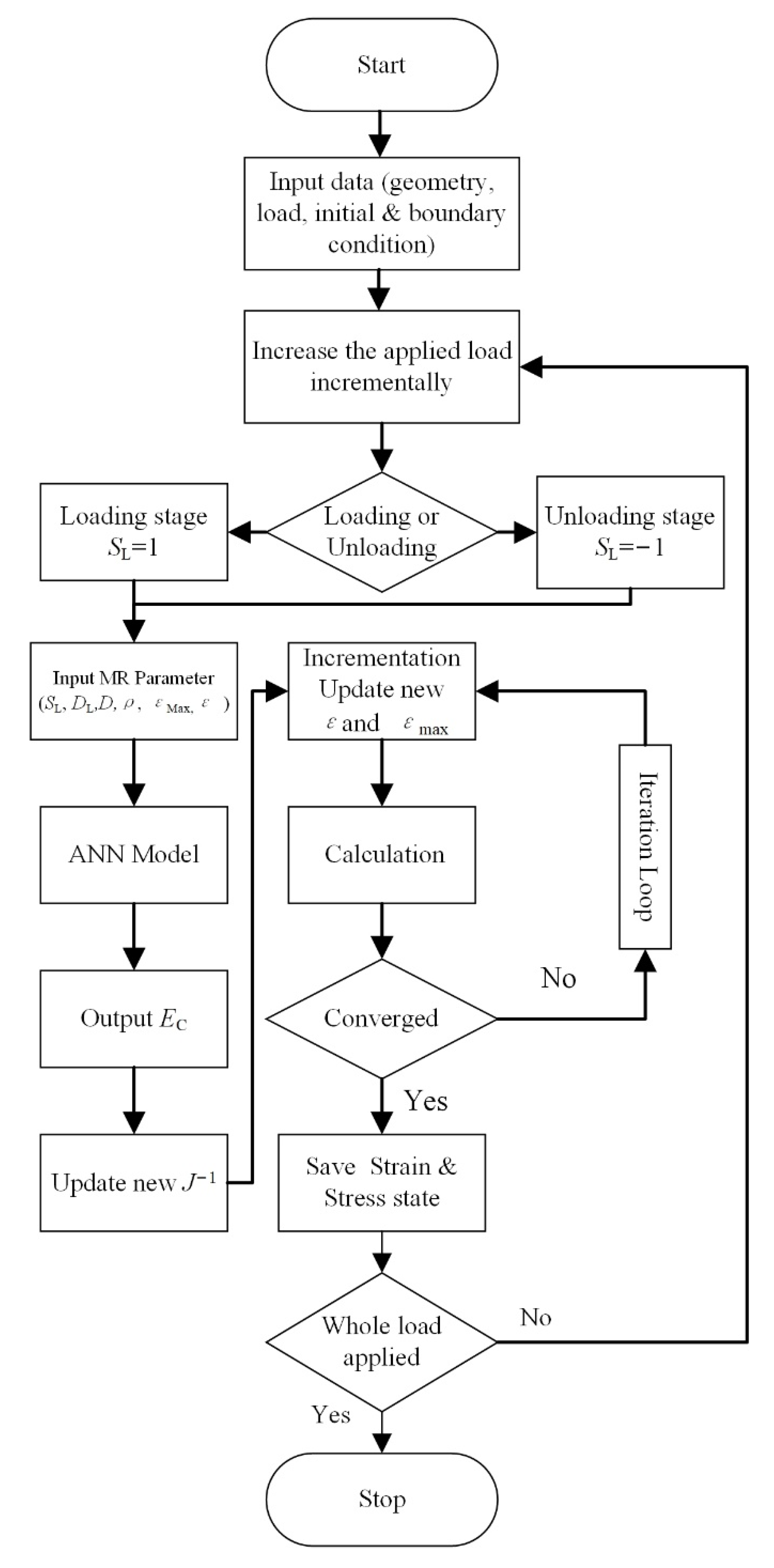
3.3. ANN MR Material Model for FEM Analysis
3.4. Static Compresstion of MR Isolator
3.5. Shock Response of MR Isolator
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rodney, D.; Gadot, B.; Martinez, O.R.; Du Roscoat, S.R.; Orgéas, L. Reversible dilatancy in entangled single wire materials. Nat. Mater. 2016, 15, 72–77. [Google Scholar] [CrossRef]
- Ning, J.; Li, Y. Dynamic flow resistivity and sound absorption of compressed fibrous porous materials: Experimental and theoretical. Phys. Fluids 2020, 32, 127103. [Google Scholar] [CrossRef]
- Negi, V.; Picu, R.C. Tensile behavior of non-crosslinked networks of athermal fibers in the presence of entanglements and friction. Soft Matter 2021. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Ma, Y.; Hu, W.; Hong, J. Research on the variable mechanical properties and application in vibration control of soft magnetic entangled metallic wire material. Smart Mater. Struct. 2021, 30, 045026. [Google Scholar] [CrossRef]
- Chatti, F.; Bouvet, C.; Michon, G.; Poquillon, D. Numerical analysis of shear stiffness of an entangled cross-linked fibrous material. Int. J. Solids Struct. 2020, 184, 221–232. [Google Scholar] [CrossRef] [Green Version]
- Bosbach, W.A. Nano-CT scans in the optimisation of purposeful experimental procedures: A study on metallic fibre networks. Med. Eng. Phys. 2020, 86, 109–121. [Google Scholar] [CrossRef]
- Ashby, M. Designing architectured materials. Scr. Mater. 2013, 68, 4–7. [Google Scholar] [CrossRef]
- Lessing, J.; Morin, S.A.; Keplinger, C.; Tayi, A.S.; Whitesides, G.M. Stretchable conductive composites based on metal wools for use as electrical vias in soft devices. Adv. Funct. Mater. 2015, 25, 1418–1425. [Google Scholar] [CrossRef] [Green Version]
- Ertas, B.H.; Luo, H. Nonlinearity dynamic characterization of oil-free wire mesh dampers. J. Eng. Gas Turbines Power 2008, 130, 032503. [Google Scholar] [CrossRef]
- San Andrés, L.; Chirathadam, T.A.; Kim, T.H. Measurement of structural stiffness and damping coefficients in a metal mesh foil bearing. J. Eng. Gas Turbines Power 2010, 132, 032503. [Google Scholar] [CrossRef]
- Zarzour, M.; Vance, J. Experimental evaluation of a metal mesh bearing damper. J. Eng. Gas Turbines Power 2000, 122, 326–329. [Google Scholar] [CrossRef]
- Childs, D.W. The space shuttle main engine high-pressure fuel turbopump rotor dynamic instability problem. J. Eng. Power 1978, 100, 48–57. [Google Scholar] [CrossRef]
- Liu, W.; Zhao, X.; Zhang, T.; Feng, K. Investigation on the rotor dynamic performance of hybrid bump-metal mesh foil bearings rotor system. Mech. Syst. Signal Proc. 2021, 147, 107076. [Google Scholar] [CrossRef]
- Feng, K.; Liu, W.; Zhang, Z.; Zhang, T. Theoretical model of flexure pivot tilting pad gas bearings with metal mesh dampers in parallel. Tribol. Int. 2016, 94, 26–38. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, Q.; Wang, Y.; Hong, J.; Scarpa, F. Topology and mechanics of metal rubber via X-ray tomography. Mater. Des. 2019, 181, 108067. [Google Scholar] [CrossRef]
- Yan, H.; Zhao, Y.; Liu, J.; Jiang, H. Analyses toward factors influencing sealing clearance of a metal rubber seal and derivation of a calculation formula. Chin. J. Aeronaut. 2016, 29, 292–296. [Google Scholar] [CrossRef] [Green Version]
- Yan, H.; Zhang, W.; Jiang, H.; Chen, L. Energy dissipation of a ring-like metal rubber isolator. Chin. Phys. B 2014, 23, 040702. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, Q.; Zhang, D.; Hu, W.; Hong, J. Experimental investigation on the dynamic mechanical properties of soft magnetic entangled metallic wire material. Smart Mater. Struct. 2017, 26, 05501. [Google Scholar] [CrossRef]
- Zhang, D.; Scarpa, F.; Ma, Y.; Boba, K.; Hong, J.; Lu, H. Compression mechanics of nickel-based superalloy metal rubber. Mater. Sci. Eng. 2013, 580, 305–312. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, Q.; Zhang, D.; Scarpab, F.; Liu, B.; Hong, J. The mechanics of shape memory alloy metal rubber. Acta Mater. 2015, 96, 89–100. [Google Scholar] [CrossRef]
- Gadot, B.; Martinez, O.R.; Du Roscoat, S.R.; Bouvard, D.; Rodney, D.; Orgéas, L. Entangled single-wire NiTi material: A porous metal with tunable superelastic and shape memory properties. Acta Mater. 2015, 96, 311–323. [Google Scholar] [CrossRef]
- Zhang, D.; Scarpa, F.; Ma, Y.; Hong, J.; Mahadik, Y. Dynamic mechanical behavior of nickel-based superalloy metal rubber. Mater. Des. 2014, 56, 69–77. [Google Scholar] [CrossRef]
- Zou, Y.; Xiong, C.; Yin, J.; Cui, K.; Zhu, X.; Deng, H.; Song, S. Experimental and constitutive model study on dynamic mechanical behavior of metal rubber under high-speed impact loading. Shock Vib. 2021, 2021, 8845375. [Google Scholar]
- Hong, J.; Zhu, B.; Ma, Y. Theoretical and experimental investigation on nonlinear characterization of metal rubber. In Proceedings of the ASME Turbo Expo 2011, Vancouver, BC, Canada, 6–10 June 2011. [Google Scholar]
- Wang, H.; Rongong, J.A.; Tomlinson, G.R.; Hong, J. Nonlinear static and dynamic properties of metal rubber dampers. In Proceedings of the International Conference on Noise and Vibration Engineering (ISMA), Leuven, Belgium, 20–22 September 2010. [Google Scholar]
- Yang, P.; Bai, H.; Xue, X.; Xiao, K.; Zhao, X. Vibration reliability characterization and damping capability of annular periodic metal rubber in the non-molding direction. Mech. Syst. Signal Proc. 2019, 132, 622–639. [Google Scholar] [CrossRef]
- Ren, Z.; Chen, Q.; Bai, H.; Wu, Y. Study on damping energy dissipation characteristics of cylindrical metal rubber in nonforming direction. Adv. Mater. Sci. Eng. 2018, 2018, 5014789. [Google Scholar] [CrossRef]
- Ren, Z.; Shen, L.; Bai, H.; Pan, L.; Xu, J. Study on the mechanical properties of metal rubber with complex contact friction of spiral coils based on virtual manufacturing technology. Adv. Eng. Mater. 2020, 22, 2000382. [Google Scholar] [CrossRef]
- Hu, J.; Du, Q.; Gao, J.; Kang, J.; Guo, B. Compressive mechanical behavior of multiple wire metal rubber. Mater. Des. 2018, 140, 231–240. [Google Scholar] [CrossRef]
- Zhu, B.; Ma, Y.; Zhang, D.; Hong, J. A constitutive model of metal rubber based on hysteresis property. Acta Phys. Sin. 2012, 61, 078101. [Google Scholar]
- Ma, Y.; Zhang, Q.; Dobah, Y.; Scarpa, F.; Fraternali, F.; Skeltond, R.E.; Zhang, D.; Hong, J. Meta-tensegrity: Design of a tensegrity prism with metal rubber. Compos. Struct. 2018, 206, 644–657. [Google Scholar] [CrossRef] [Green Version]
- Cao, F.; Bai, H.; Ren, G.; Fan, H. Constitutive model of metal rubber material based on curved cantilever beam of variable length. Chin. J. Mech. Eng. 2012, 48, 61–66. [Google Scholar] [CrossRef]
- Chegodaev, D.E.; Mylukin, O.P.; Koltygin, E.V. The Design of Metal Rubber Component; Publishing Company of National Defence Industry: Beijing, China, 2000. [Google Scholar]
- Wu, X.; Ghaboussi, J. Neural Network-Based Material Modeling. Ph.D. Thesis, University of Illinois at Urbana-Champaign, Champaign, IL, USA, 1991. [Google Scholar]
- Qiao, L.; Bao, A.; Lai, Z.; Liu, Y.; Zhu, J.; Wang, Y. Alloy design and properties optimization of multi-component alloy based on solidification characteristics. Mater. Sci. Eng. 2021, 805, 140576. [Google Scholar] [CrossRef]
- Feng, S.; Zhou, H.; Dong, H. Using deep neural network with small dataset to predict material defects. Mater. Des. 2019, 162, 300–310. [Google Scholar] [CrossRef]
- Wen, D.; Yue, T.; Xiong, Y.; Wang, K.; Wang, J.; Zheng, Z.; Li, J. High-temperature tensile characteristics and constitutive models of ultrahigh strength steel. Mater. Sci. Eng. 2021, 803, 140419. [Google Scholar] [CrossRef]
- Yang, C.; Kim, Y.; Ryu, S.; Gu, G.X. Prediction of composite microstructure stress-strain curves using convolutional neural networks. Mater. Des. 2020, 189, 108509. [Google Scholar] [CrossRef]
- Lin, Y.C.; Chen, X. A critical review of experimental results and constitutive descriptions for metals and alloys in hot working. Mater. Des. 2011, 32, 1733–1759. [Google Scholar] [CrossRef]
- Sha, W.; Edwards, K.L. The use of artificial neural networks in materials science based research. Mater. Des. 2007, 28, 1747–1752. [Google Scholar] [CrossRef]
- Yucesan, Y.A.; Viana, F.A.; Manin, L.; Mahfoud, J. Adjusting a torsional vibration damper model with physics informed neural networks. Mech. Syst. Signal Proc. 2021, 154, 107552. [Google Scholar] [CrossRef]
- Zobeiry, N.; Reiner, J.; Vaziri, R. Theory-guided machine learning for damage characterization of composites. Compos. Struct. 2020, 246, 112407. [Google Scholar] [CrossRef]
- Lutz, B.; Kisskalt, D.; Mayr, A.; Regulin, D.; Pantano, M.; Franke, J. In-situ identification of material batches using machine learning for machining operations. J. Intell. Manuf. 2021, 32, 1485–1495. [Google Scholar] [CrossRef]
- Hajinazar, S.; Shao, J.; Kolmogorov, A.N. Stratified construction of neural network based interatomic models for multicomponent materials. Phys. Rev. B 2017, 95, 014114. [Google Scholar] [CrossRef] [Green Version]
- Huang, D.; Fuhg, J.N.; Weißenfels, C.; Wriggers, P. A machine learning based plasticity model using proper orthogonal decomposition. Comput. Methods Appl. Mech. Eng. 2020, 365, 113008. [Google Scholar] [CrossRef] [Green Version]
- Chojaczyk, A.A.; Teixeira, A.P.; Neves, L.C.; Cardoso, J.B.; Soares, C.G. Review and application of Artificial Neural Networks models in reliability analysis of steel structures. Struct. Saf. 2015, 52, 78–89. [Google Scholar] [CrossRef]
- Kang, X.; Lv, Z.; Chen, Z.; Zhao, Y. Prediction of ammonia absorption in ionic liquids based on extreme learning machine modeling and a novel molecular descriptor SEP. Environ. Res. 2020, 189, 109951. [Google Scholar] [CrossRef]
- Kang, X.; Lv, Z.; Zhao, Y.; Chen, Z. A QSPR model for estimating Henry’s law constant of H2S in ionic liquids by ELM algorithm. Chemosphere 2021, 269, 128743. [Google Scholar] [CrossRef]
- Liang, L.; Liu, M.; Martin, C.; Sun, W. A deep learning approach to estimate stress distribution: A fast and accurate surrogate of finite-element analysis. J. R. Soc. Interface 2018, 138, 20170844. [Google Scholar] [CrossRef] [Green Version]
- Charalampous, P. Prediction of cutting forces in milling using machine learning algorithms and finite element analysis. J. Mater. Eng. Perform. 2021, 30, 2002–2013. [Google Scholar] [CrossRef]
- Ford, E.; Maneparambil, K.; Rajan, S.; Neithalath, N. Machine learning-based accelerated property prediction of two-phase materials using microstructural descriptors and finite element analysis. Comput. Mater. Sci. 2021, 191, 110328. [Google Scholar] [CrossRef]
- Jeong, K.; Lee, H.; Kwon, O.M.; Jung, J.; Kwon, D.; Han, H.N. Prediction of uniaxial tensile flow using finite element-based indentation and optimized artificial neural networks. Mater. Des. 2020, 196, 109104. [Google Scholar] [CrossRef]
- Hashash, Y.M.A.; Jung, S.; Ghaboussi, J. Numerical implementation of a neural network based material model in finite element analysis. Int. J. Numer. Meth. Eng. 2004, 59, 989–1005. [Google Scholar] [CrossRef]
- Jamli, M.R.; Ariffin, A.K.; Wahab, D.A. Incorporating feedforward neural network within finite element analysis for L-bending springback prediction. Expert Syst. Appl. 2015, 42, 2604–2614. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, Q.; Zhang, D.; Scarpa, F.; Gao, D.; Hong, J. Size-dependent mechanical behavior and boundary layer effects in entangled metallic wire material systems. J. Mater. Sci. 2017, 52, 3741–3756. [Google Scholar] [CrossRef] [Green Version]
- Wang, L. Metal Rubber Sealing System Model Establishment and Simulation Analysis. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2010. [Google Scholar]
- Karnovsky, I.A.; Lebed, E. Theory of Vibration Protection; Springer International Publishing: Cham, Switzerland, 2016; pp. 176–182. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metal Wire Diameter D | εmax in x–Direction | εmax in y–Direction | Relative Density ρ (Training) | Relative Density ρ (Testing) |
|---|---|---|---|---|
| 0.1 mm | 0.1, 0.15, 0.2, 0.25, 0.3 | 0.025, 0.05, 0.075, 0.1 | 0.23, 0.25, 0.28, 0.3, 0.33, 0.35, 0.37, 0.4, 0.42, 0.45 | 0.26 |
| 0.12 mm | 0.1, 0.15, 0.2, 0.25, 0.3 | 0.025, 0.05, 0.075, 0.1 | 0.23, 0.25, 0.28, 0.3, 0.33, 0.35, 0.37, 0.4, 0.42, 0.45 | 0.32 |
| 0.15 mm | 0.1, 0.15, 0.2, 0.25, 0.3 | 0.025, 0.05, 0.075, 0.1 | 0.23, 0.25, 0.28, 0.3, 0.33, 0.35, 0.37, 0.4, 0.42, 0.45 | 0.39 |
| 0.2 mm | 0.1, 0.15, 0.2, 0.25, 0.3 | 0.025, 0.05, 0.075, 0.1 | 0.23, 0.25, 0.28, 0.3, 0.33, 0.35, 0.37, 0.4, 0.42, 0.45 | 0.385 |
| No. | Neural Network Structure | Training | Testing | ||
|---|---|---|---|---|---|
| MSE | R2 | MSE | R2 | ||
| 1 | 8 × 4 | 171 | 0.9955 | 446 | 0.9893 |
| 2 | 16 × 8 | 17.0 | 0.9995 | 376 | 0.9905 |
| 3 | 24 × 12 | 2.70 | 0.9999 | 292 | 0.9930 |
| 4 | 32 × 16 | 0.81 | 0.9999 | 439 | 0.9853 |
| 5 | 8 × 4 × 2 | 119 | 0.9962 | 348 | 0.9916 |
| 6 | 16 × 8 × 4 | 11.5 | 0.9997 | 366 | 0.9912 |
| 7 | 24 × 12 × 6 | 1.06 | 0.9999 | 1913 | 0.9544 |
| 8 | 32 × 16 × 8 | 0.48 | 0.9999 | 2273 | 0.9458 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Yan, H.; Wang, Y.; Jiang, T.; Jiang, H. Predicting Nonlinear and Anisotropic Mechanics of Metal Rubber Using a Combination of Constitutive Modeling, Machine Learning, and Finite Element Analysis. Materials 2021, 14, 5200. https://doi.org/10.3390/ma14185200
Zhao Y, Yan H, Wang Y, Jiang T, Jiang H. Predicting Nonlinear and Anisotropic Mechanics of Metal Rubber Using a Combination of Constitutive Modeling, Machine Learning, and Finite Element Analysis. Materials. 2021; 14(18):5200. https://doi.org/10.3390/ma14185200
Chicago/Turabian StyleZhao, Yalei, Hui Yan, Yiming Wang, Tianyi Jiang, and Hongyuan Jiang. 2021. "Predicting Nonlinear and Anisotropic Mechanics of Metal Rubber Using a Combination of Constitutive Modeling, Machine Learning, and Finite Element Analysis" Materials 14, no. 18: 5200. https://doi.org/10.3390/ma14185200
APA StyleZhao, Y., Yan, H., Wang, Y., Jiang, T., & Jiang, H. (2021). Predicting Nonlinear and Anisotropic Mechanics of Metal Rubber Using a Combination of Constitutive Modeling, Machine Learning, and Finite Element Analysis. Materials, 14(18), 5200. https://doi.org/10.3390/ma14185200