Predict the Phase Angle Master Curve and Study the Viscoelastic Properties of Warm Mix Crumb Rubber-Modified Asphalt Mixture

Abstract
1. Introduction
2. Test Specimen Preparation and Testing
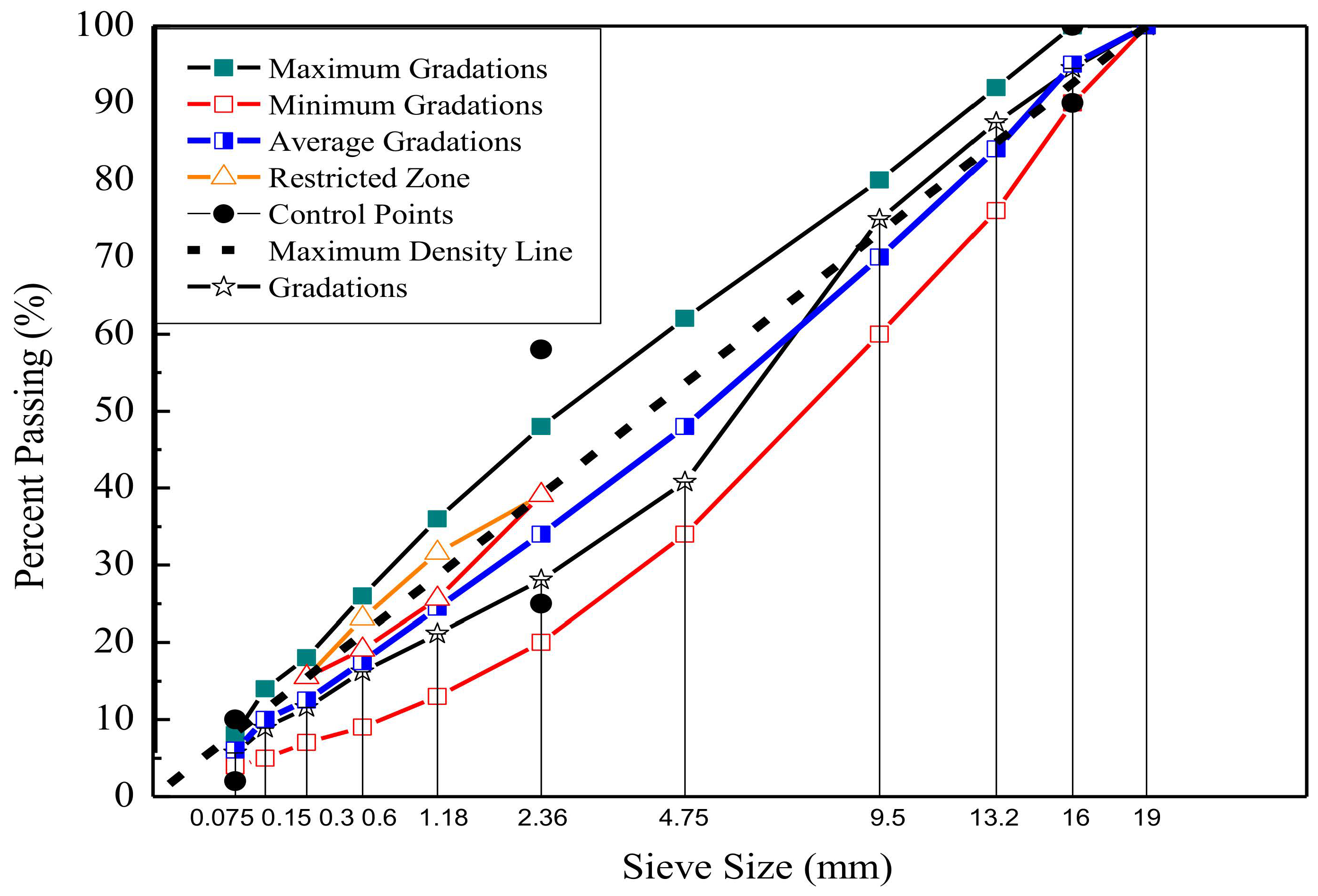
2.1. Materials and Specimen Fabricating Process
2.2. Dynamic Modulus Test
3. Methodology
3.1. Shift Factors Calculated Methods
3.2. Master Curve Model of the Dynamic Modulus
3.3. Master Curve of the Phase Angle
3.4. Determination of the Master Curve Model Parameters of Dynamic Modulus and Phase Angle
4. Results and Discussion
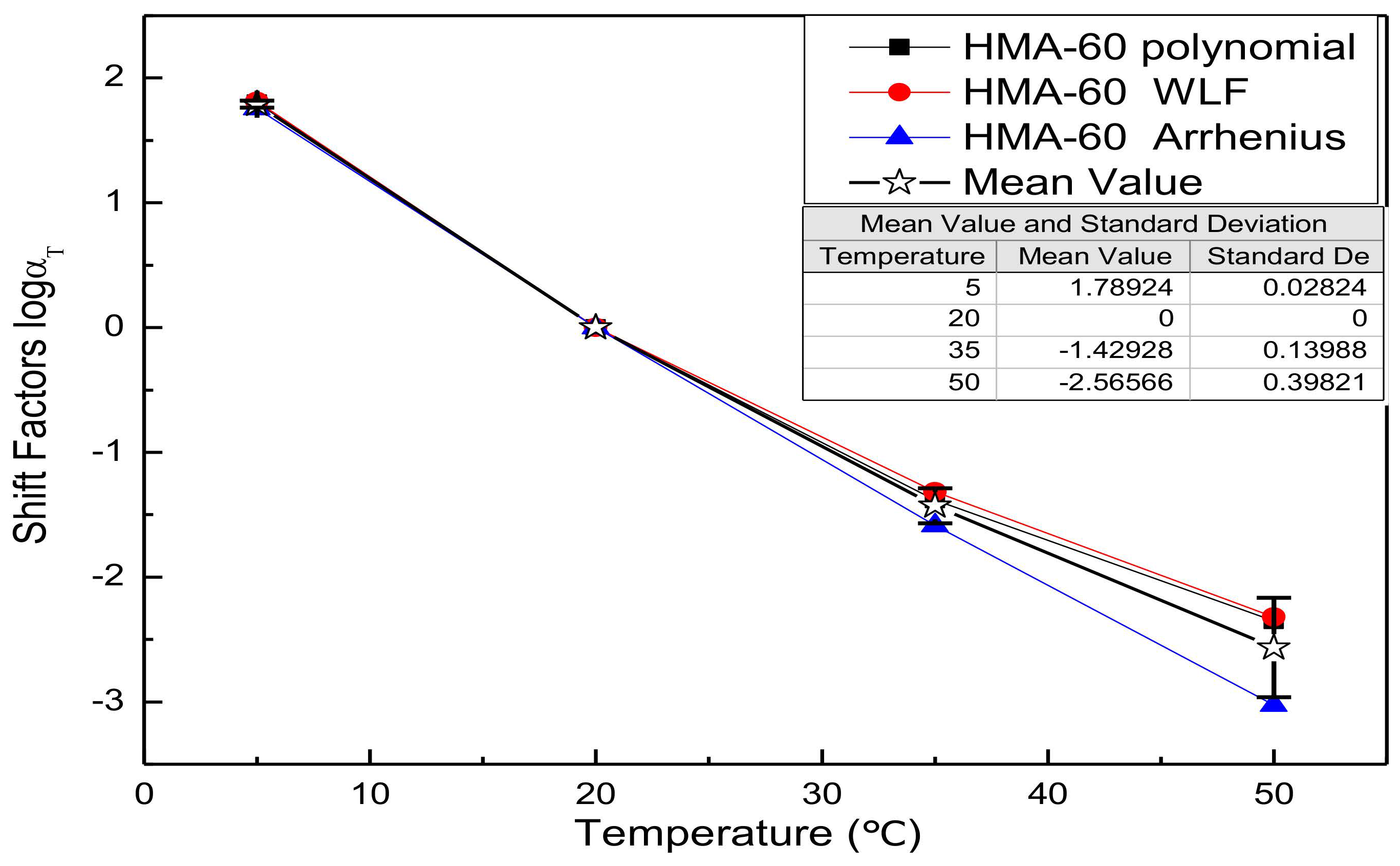
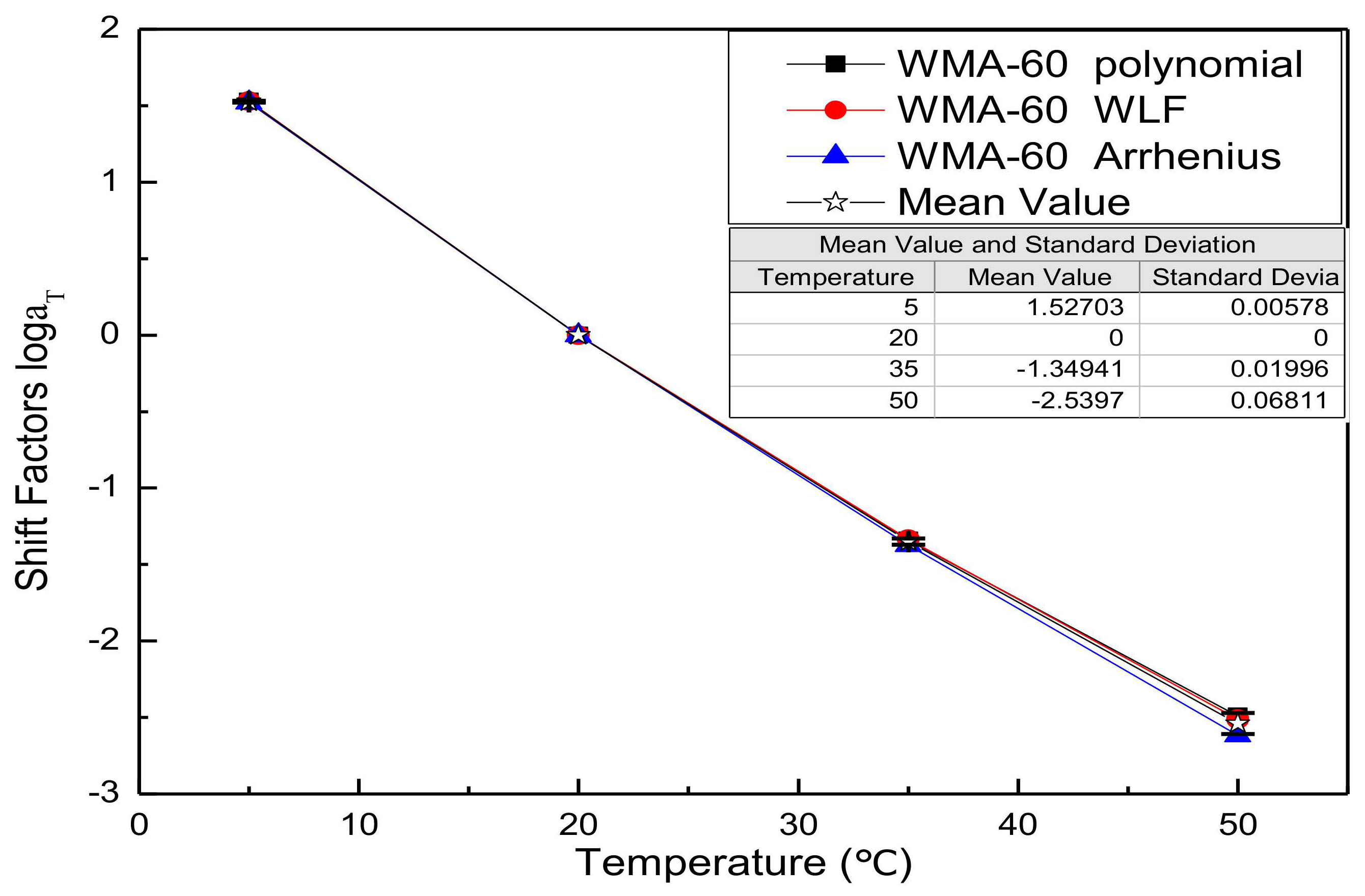
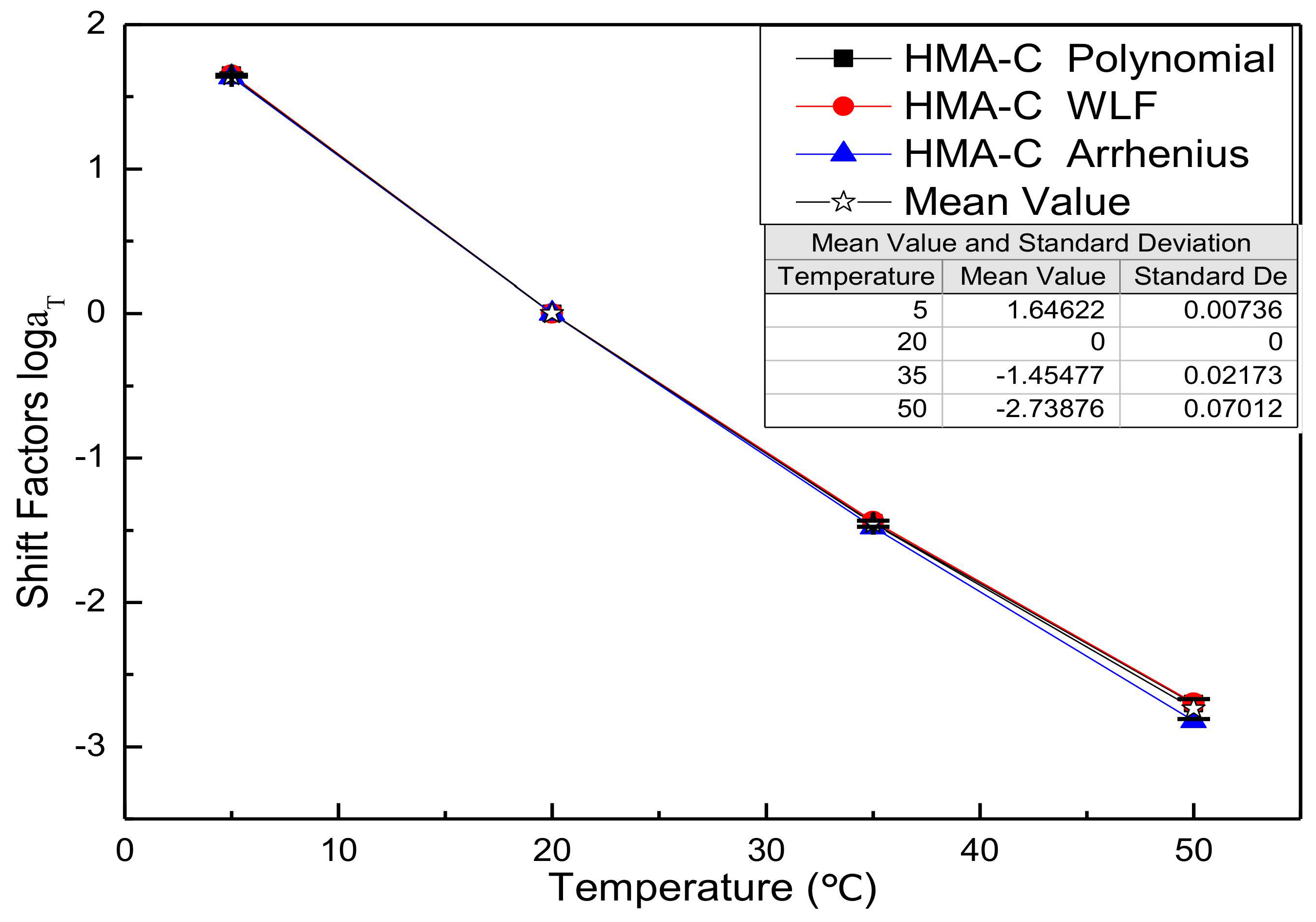
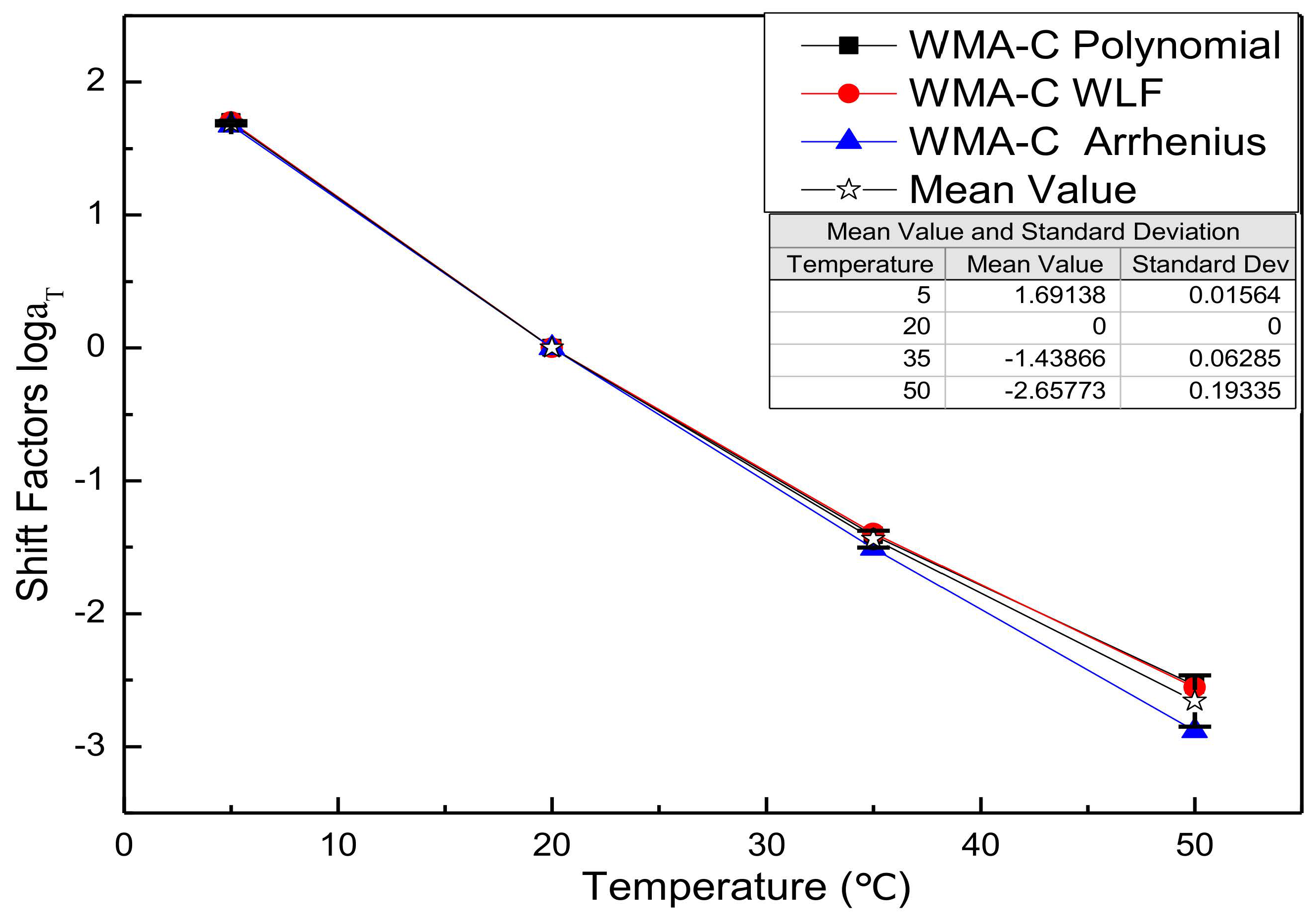
4.1. Comparison of the Shift Factors
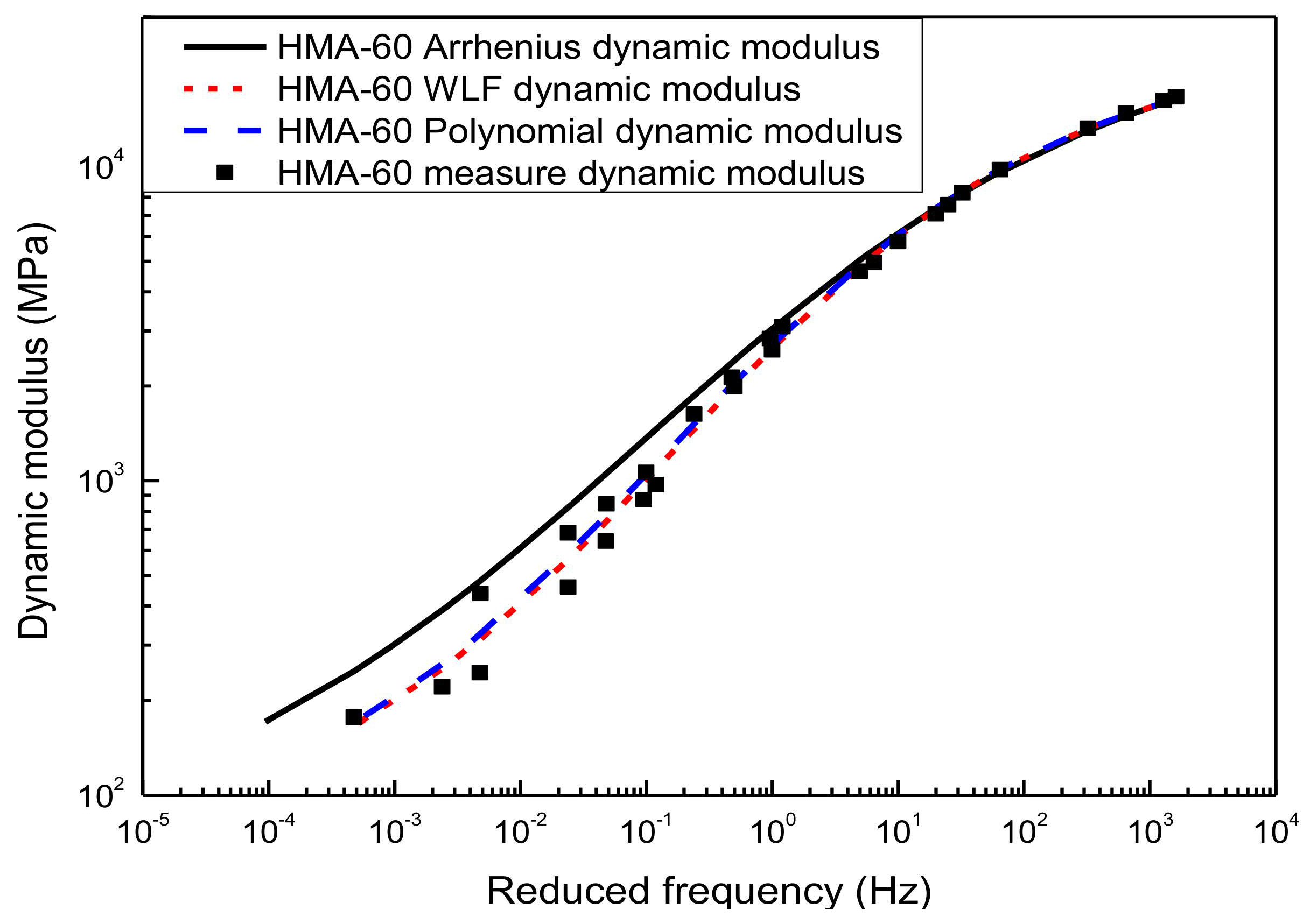
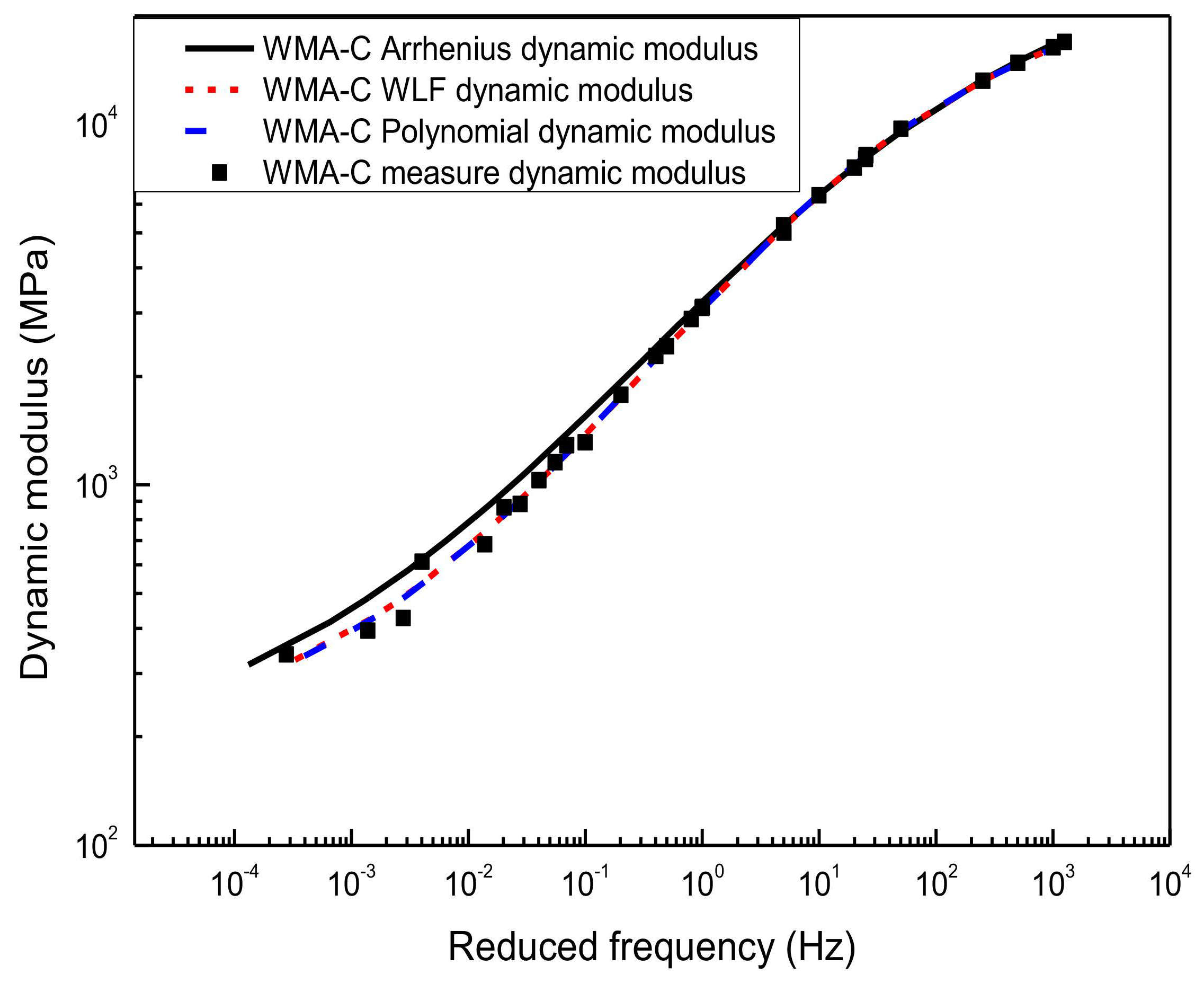
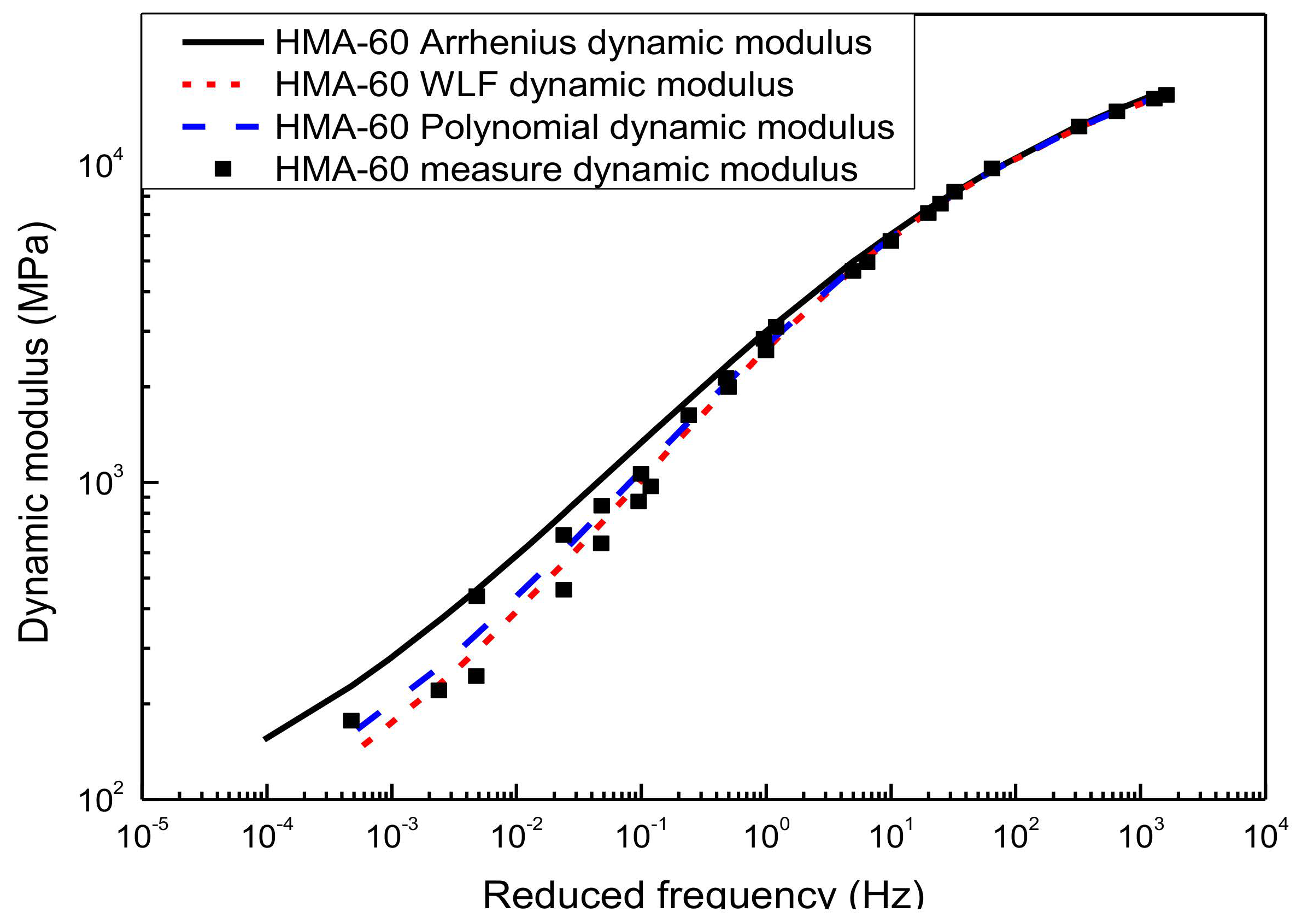
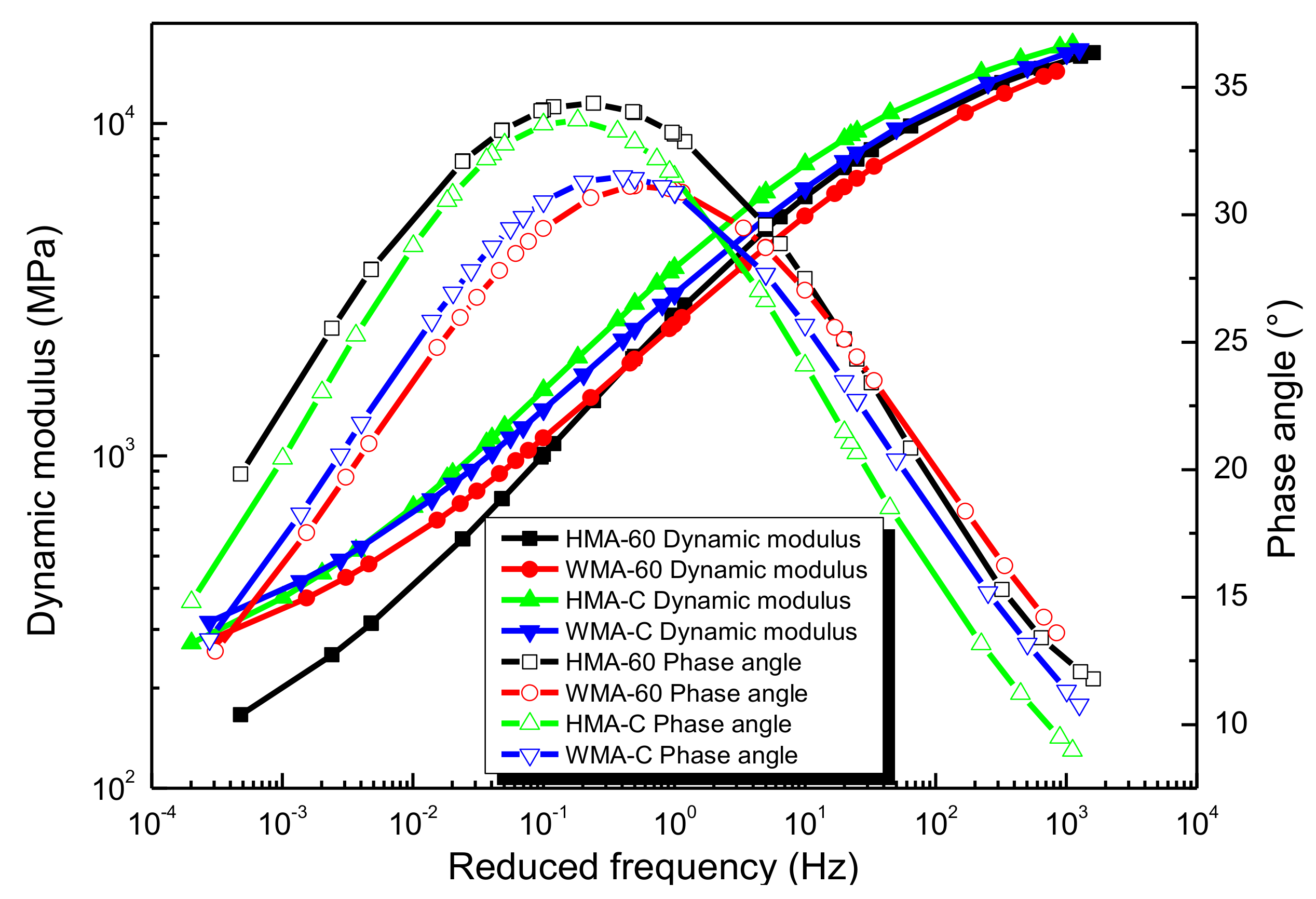
4.2. Comparison of Dynamic Modulus Master Curve
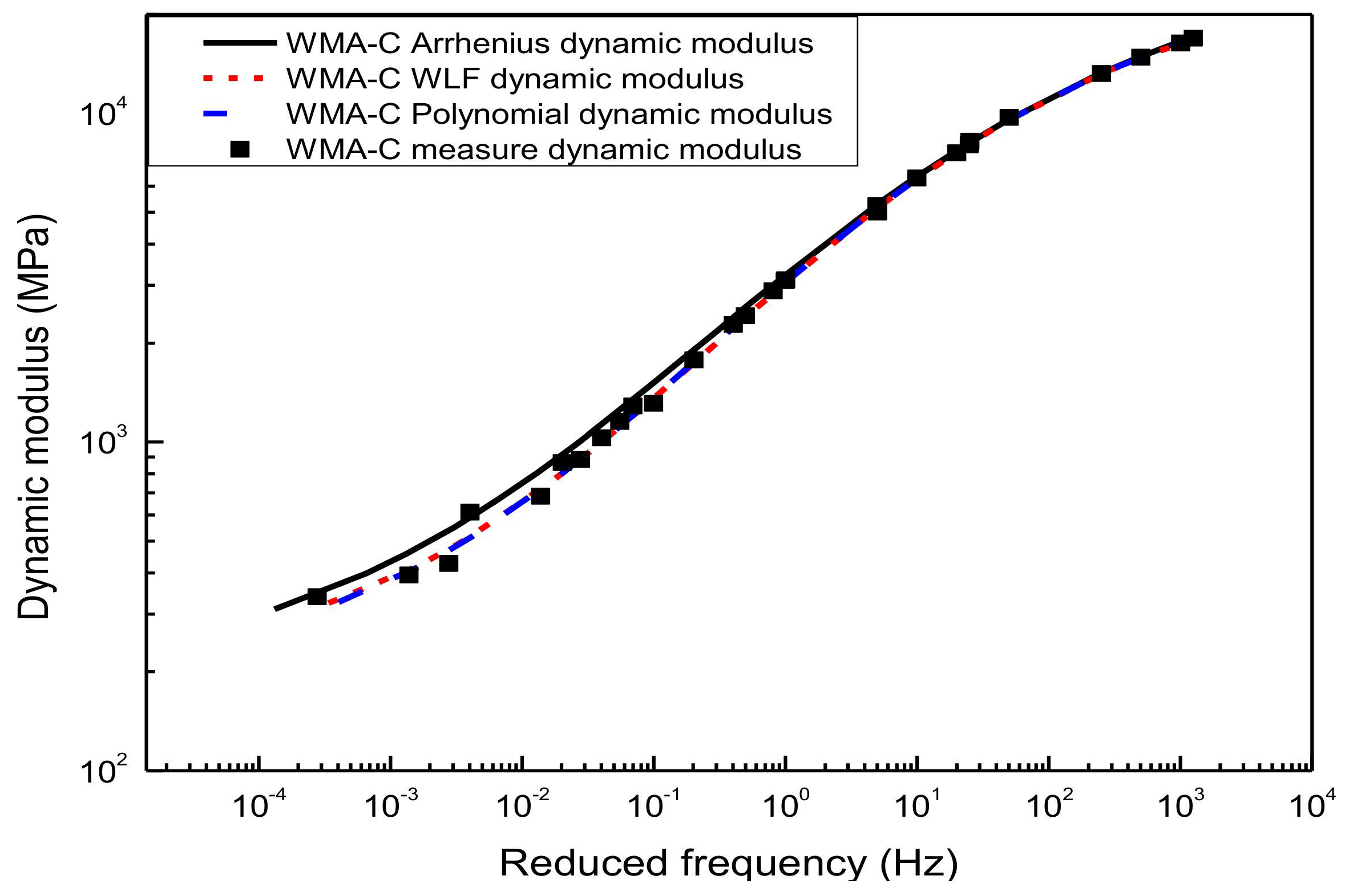
4.2.1. Sigmoidal Dynamic Modulus Master Curve
4.2.2. Generalized Sigmoidal Dynamic Modulus Master Curve
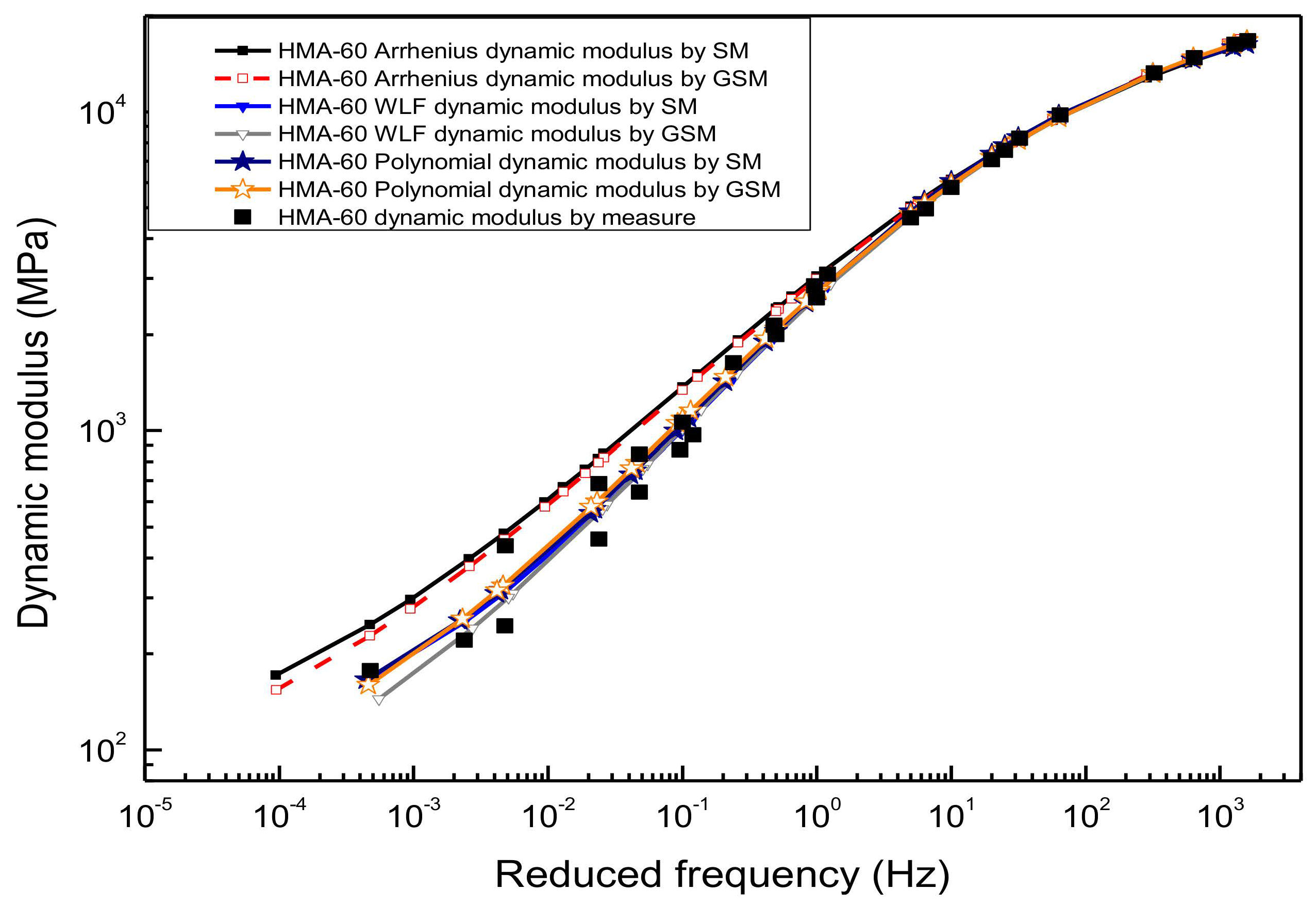
4.2.3. Compared Sigmoidal Dynamic Modulus Master Curve and Generalized Sigmoidal Dynamic Modulus Master Curve
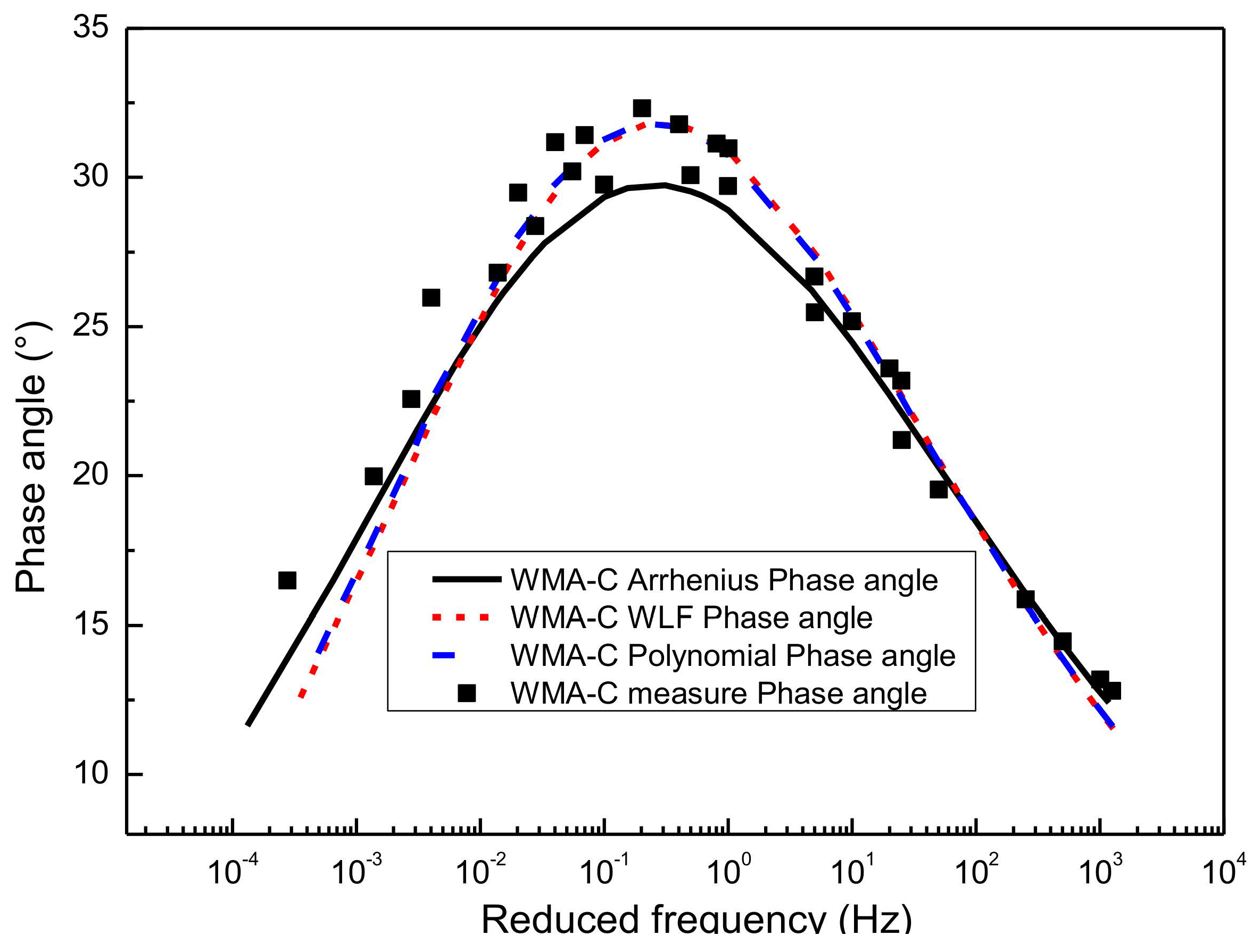
4.3. Comparison of Phase Angle Master Curve
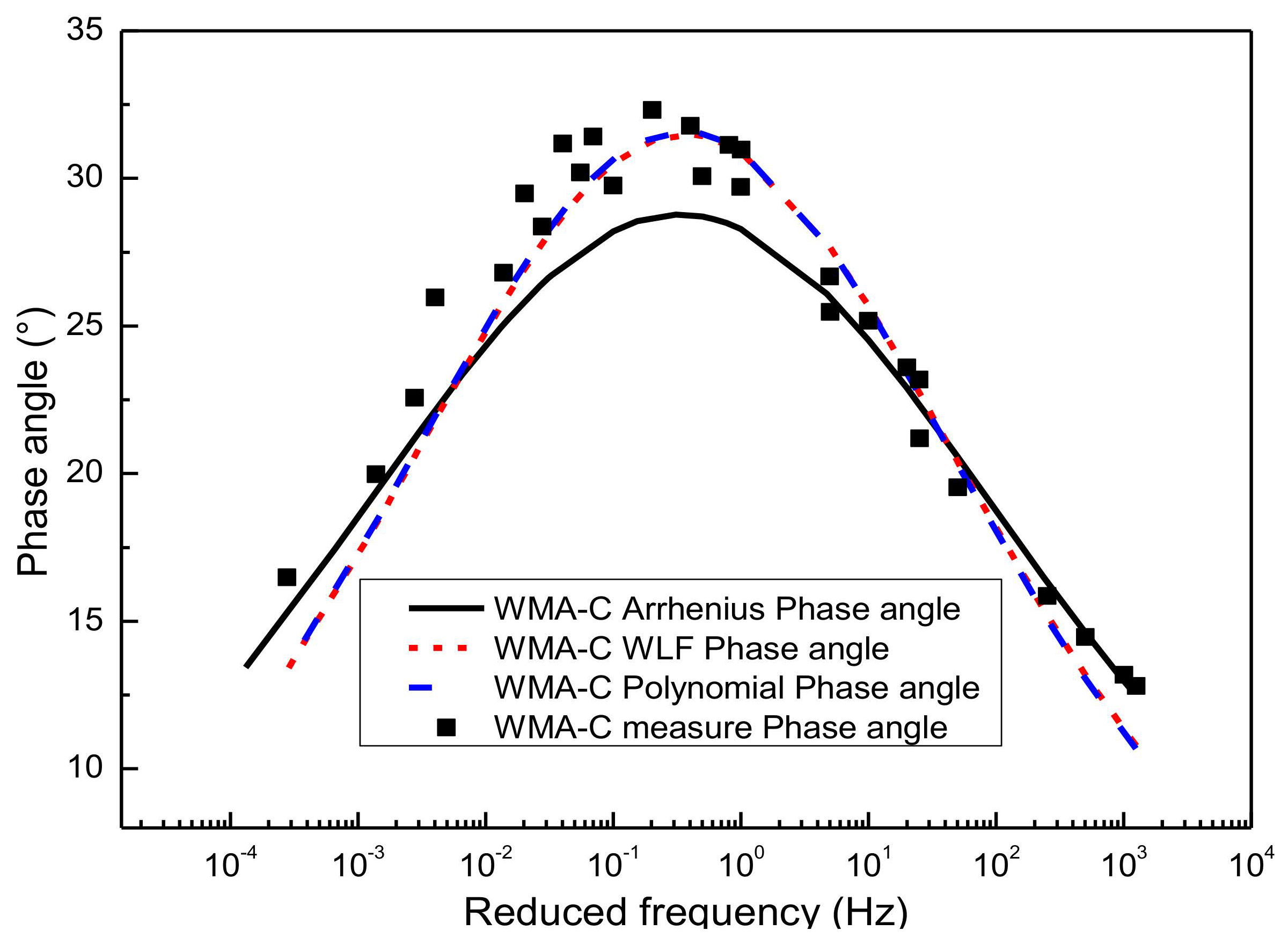
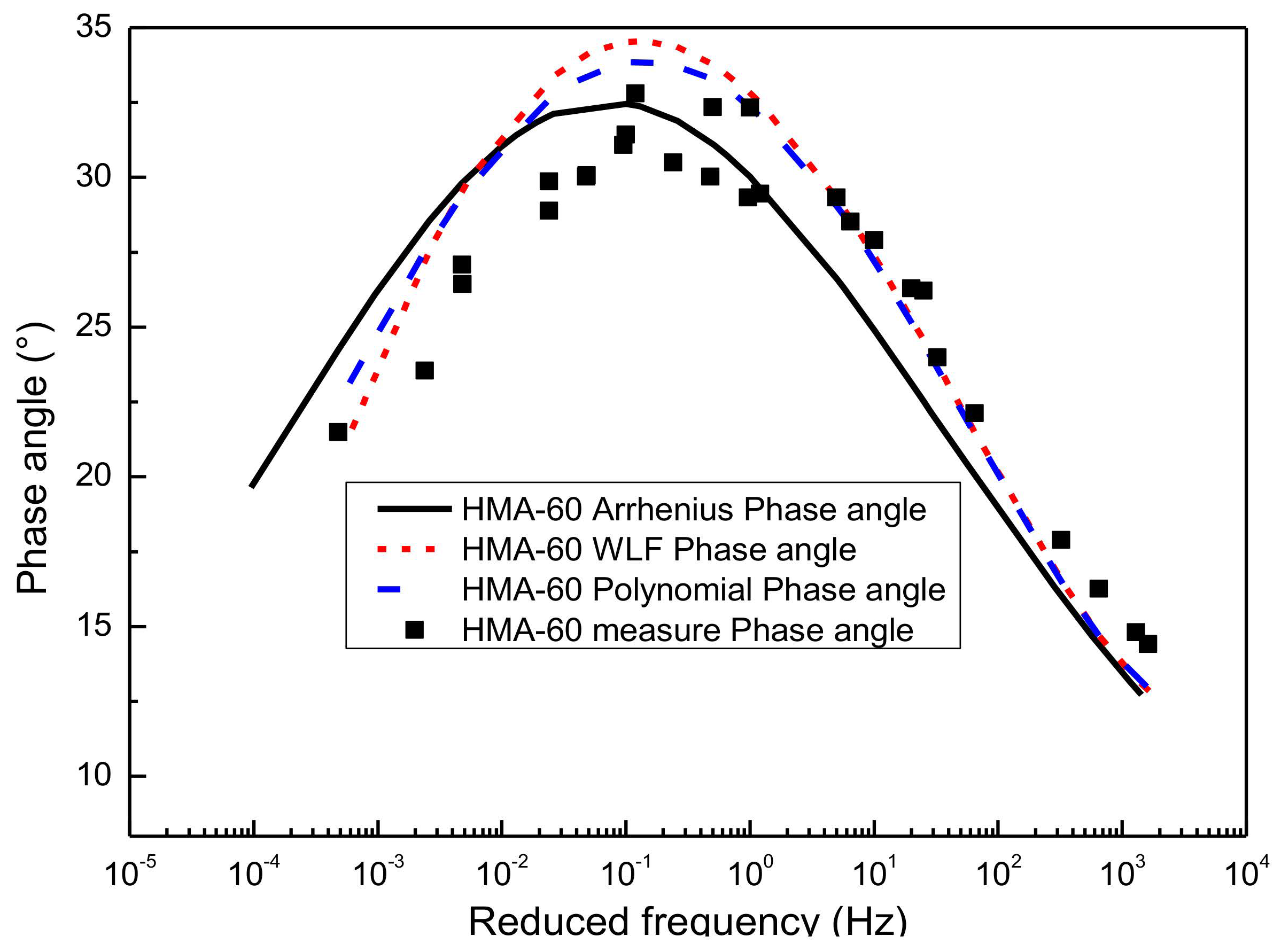
4.3.1. Prediction the Phase Angle Master Curve from Sigmoidal Dynamic Modulus Master Curve
4.3.2. Prediction the Phase Angle Master Curve from Generalized Sigmoidal Dynamic Modulus Master Curve
4.3.3. Compared Phase Angle Master Curve Obtained by the Sigmoidal Dynamic Modulus Master Curve and Generalized Sigmoidal Dynamic Modulus Master Curve
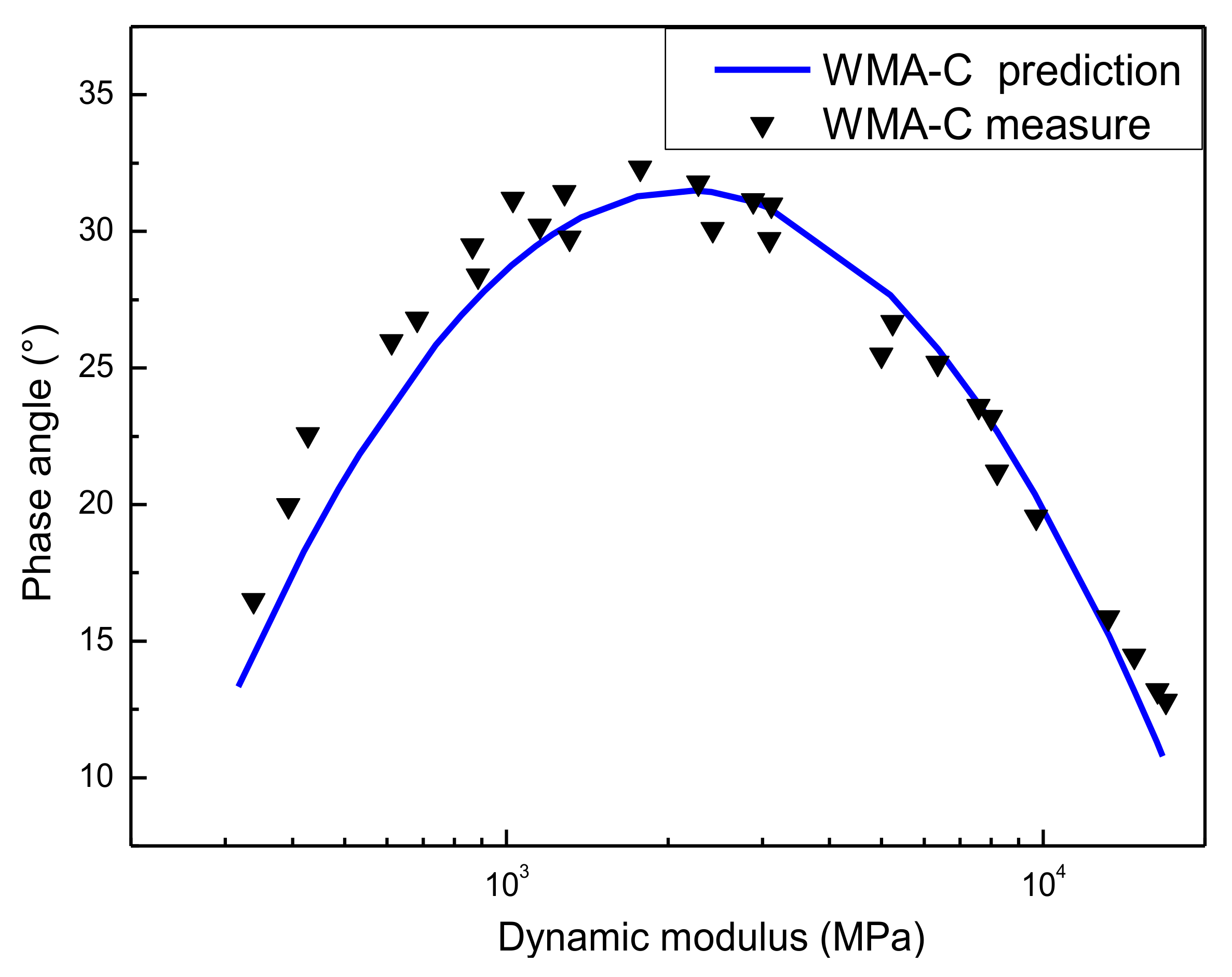
4.4. Verification of Compliance with LVE Theory between Dynamic Modulus and Phase Angle Master Curves
4.5. Comparing Other LVE Response Function of the Asphalt Mixture
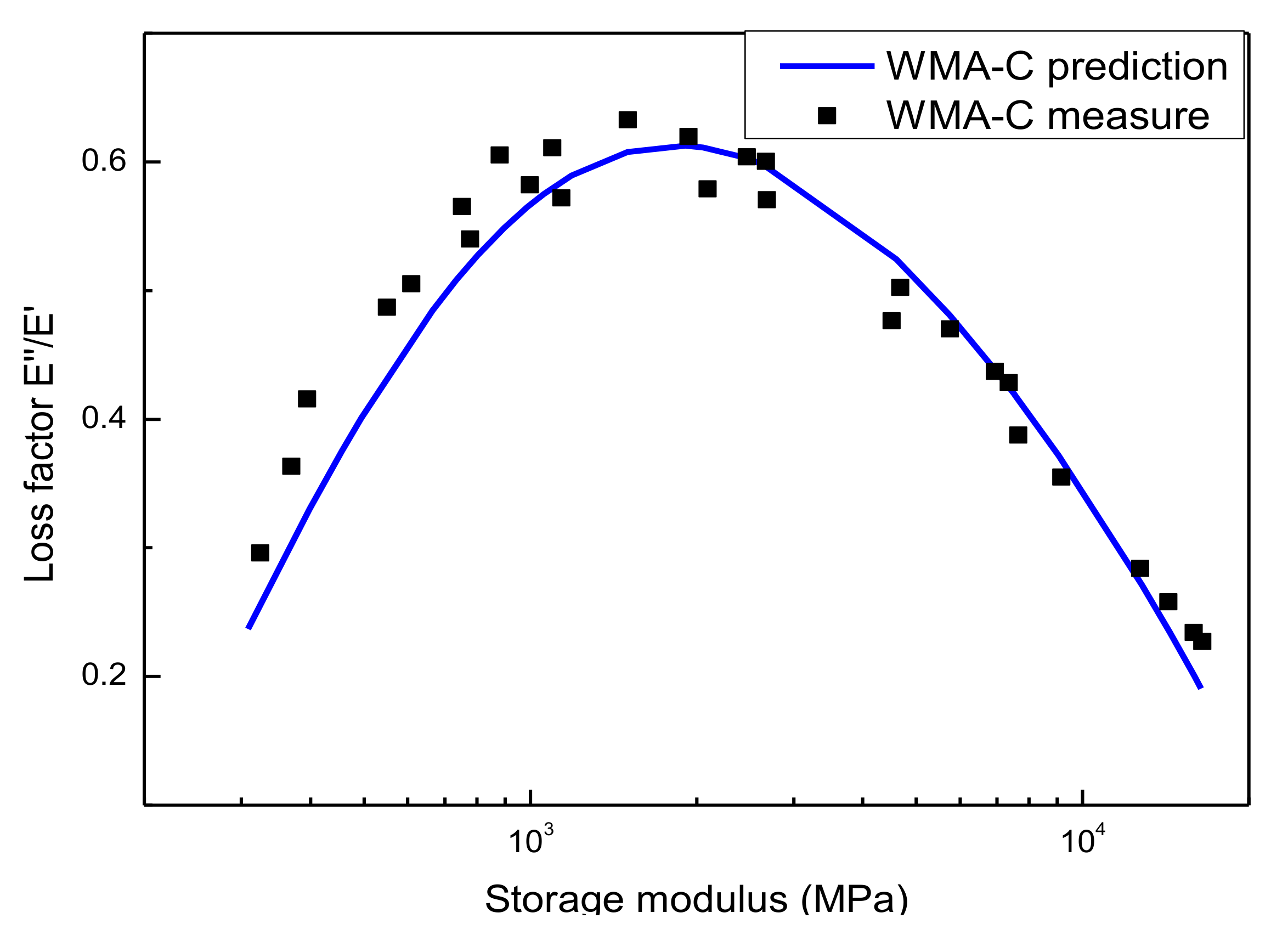
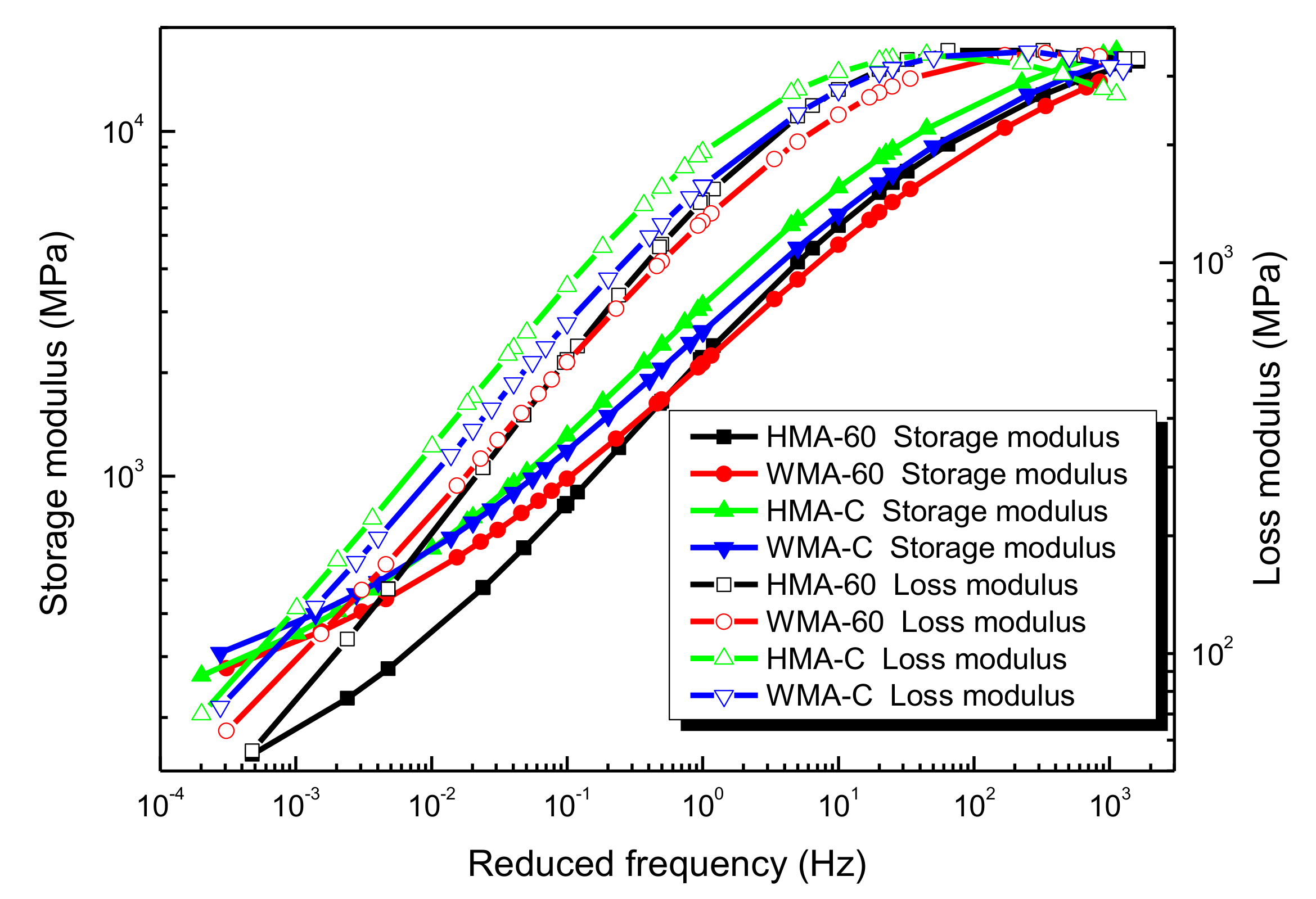
4.5.1. Comparing the Storage Modulus and the Loss Modulus
4.5.2. Comparing to the Relaxation Modulus
4.5.3. Comparing to the Creep Compliance
5. Conclusions
- (1)
- The shift factor calculated by the Arrhenius equation is always smaller than the WLF equation and the second-order polynomial equation, and the higher temperature, the more significant.
- (2)
- Both SM and GSM can be used as the master curve models of dynamic modulus, except that GSM presents slightly excellent fitting than SM.
- (3)
- Compared with the laboratory results, the prediction of phase angles constructed based on the K-K relations shows a higher correlation coefficient. Moreover, the accuracy of the predicted phase angle depends on the accuracy of the dynamic modulus master curve.
- (4)
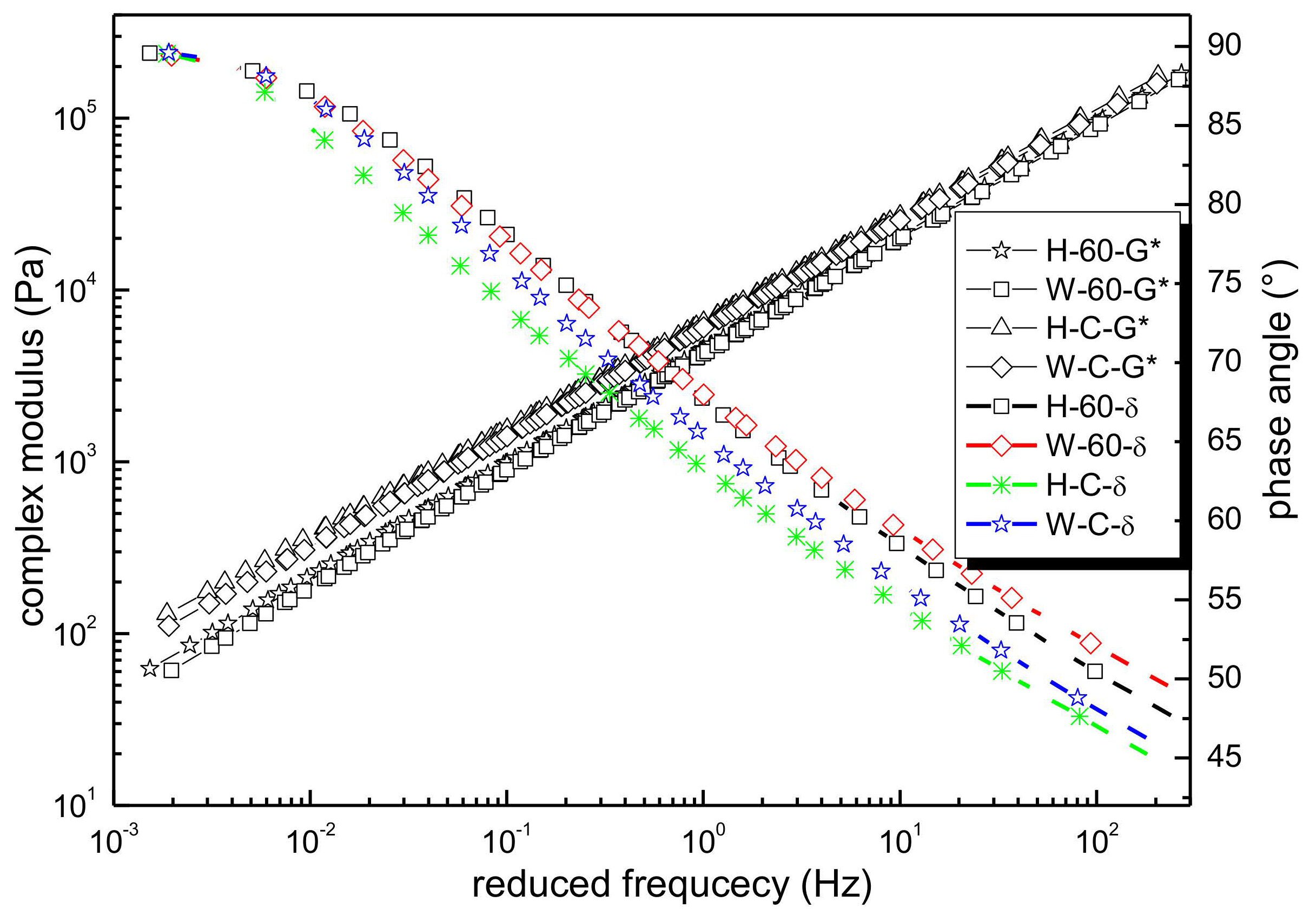
- The Black space diagram and the Wicket diagram demonstrate that the master curve of dynamic modulus and phase angle is constructed by the slope method compliance LVE theory.
- (5)
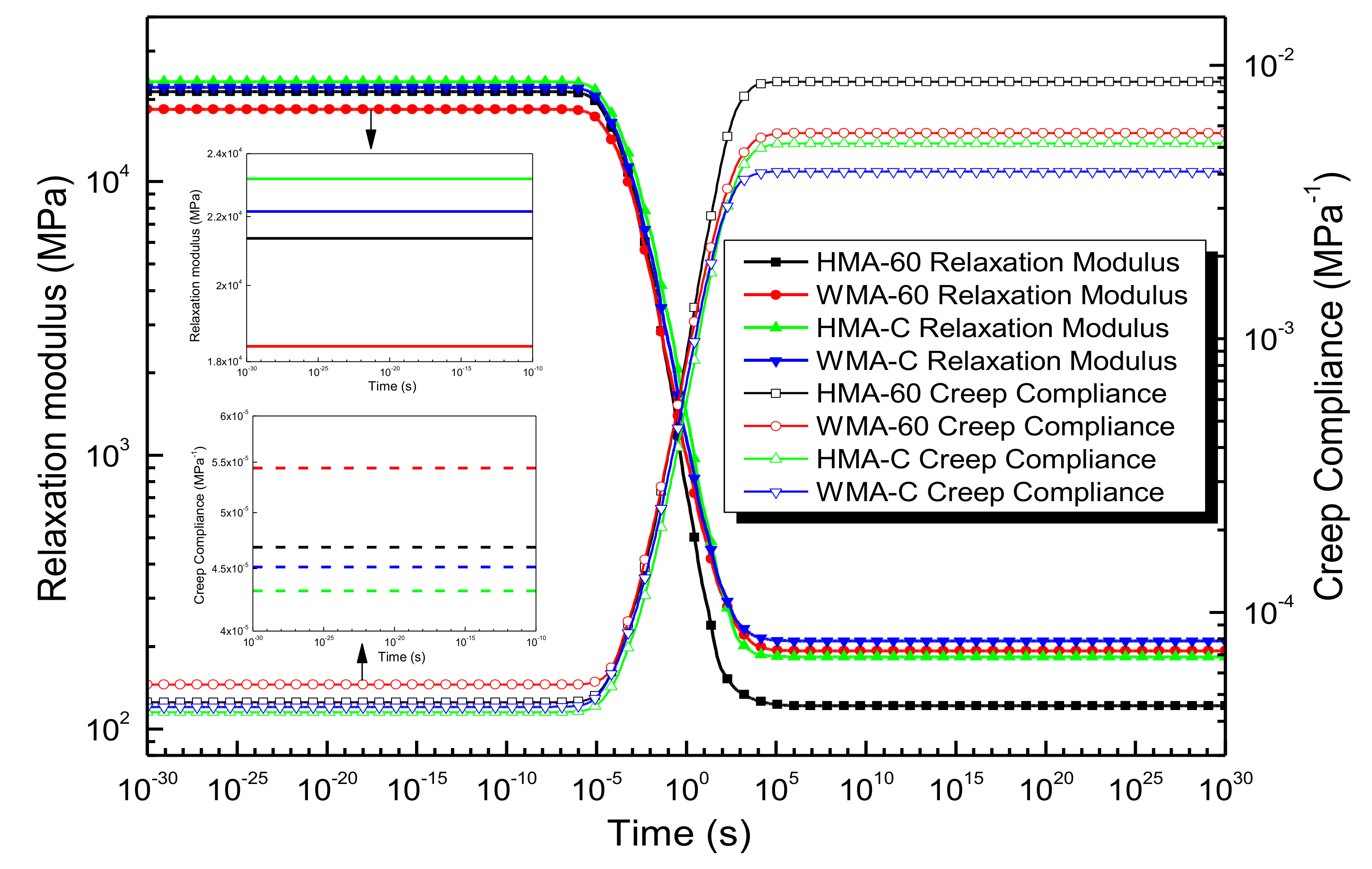
- According to the viscoelastic theory, the storage modulus master curve and the loss modulus master curve can be obtained from the complex modulus test. Furthermore, the storage compliance master curve and the loss compliance master curve can also be obtained. Finally, the master curve of the relaxation modulus and creep compliance can be obtained in the region.
- (6)
- From the results of dynamic modulus and phase angle, we can obtain that the deformation resistance of HMA-60 is not as good as HMA-C. Once the warm mix Additive was added, the mixture’s deformation resistance in the low-frequency region (high temperature) will be improved, the viscous flow in the high-frequency region (low temperature) will also be enhanced. The WMA-C presents a better deformation resistance at high temperature, while WMA-60 presents better crack resistance at low temperature.
- (7)
- From the results of relaxation modulus and creep compliance, it can be learned that the HMA-60 exhibits better low-temperature deformation but less high-temperature deformation resistance than the HMA-C. In addition, the WMA exhibits better low-temperature deformation and high-temperature deformation resistance than the corresponding HMA.
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Conventional Properties of Crumb Rubber Modified Asphalt Binder

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Binder | Penetration @25 °C/0.1 mm | Ductility @5 °C/cm | Softening Point/°C | Viscosity @175 °C 20 RPM/cP |
|---|---|---|---|---|
| H-CR-60 | 73.2 | 16.5 | 53.9 | 1452 |
| W-CR-60 | 70.8 | 15.2 | 56.8 | 1148 |
| H-CR-C | 67.3 | 25.3 | 60.1 | 1633 |
| W-CR-C | 65.7 | 22.9 | 62.3 | 1384 |
Appendix A.2. The Master Curves of the Crumb Rubber Modified Asphalt Binder

References
- Schapery, R.A. Nonlinear viscoelastic solids. Int. J. Solids Struct. 2000, 37, 359–366. [Google Scholar] [CrossRef]
- Hajikarimi, P.; Tehrani, F.F.; Nejad, F.M.; Absi, J.; Rahi, M.; Khodaii, A.; Petit, C. Mechanical behavior of polymer-modified bituminous mastics. I: Experimental approach. J. Mater. Civ. Eng. 2019, 31, 04018337. [Google Scholar] [CrossRef]
- Lee, H.J.; Kim, Y.R. Viscoelastic constitutive model for asphalt concrete under cyclic loading. J. Eng. Mech. 1998, 124, 32–40. [Google Scholar] [CrossRef]
- Gibson, N.H.; Schwartz, C.W.; Schapery, R.A.; Witczak, M.W. Viscoelastic, viscoplastic, and damage modeling of asphalt concrete in unconfined compression. Transp. Res. Rec. 2003, 1860, 3–15. [Google Scholar] [CrossRef]
- Nguyen, Q.T.; Di Benedetto, H.; Sauzéat, C. Linear and nonlinear viscoelastic behaviour of bituminous mixtures. Mater. Struct. 2015, 48, 2339–2351. [Google Scholar] [CrossRef]
- Diab, A.; You, Z.P.; Adhikari, S.; Li, X.L. Modeling shear stress response of bituminous materials under small and large strains. Constr. Build. Mater. 2020, 252, 119133. [Google Scholar] [CrossRef]
- Heukelom, W.; Klomp, A.J. Road design and dynamic loading. Assoc. Asphalt Paving Technol. Proc. 1964, 33, 92–125. [Google Scholar]
- Pellinen, T.K.; Witczak, M.W.; Bonaquist, R.F. Asphalt mix master curve construction using sigmoidal fitting function with non-linear least squares optimization technique. In Proceedings of the 15th ASCE Engineering Mechanics Conference, Columbia University, New York, NY, USA, 2–5 June 2002. [Google Scholar]
- Sirin, O.; Paul, D.K.; Khan, M.S.; Kassem, E.; Darabi, M.K. Effect of Aging on Viscoelastic Properties of Asphalt Mixtures. J. Transp. Eng. B Pave. 2019, 145, 04019034. [Google Scholar] [CrossRef]
- Weibull, W. A statistical distribution function of wide applicability. J Appl Mech. 1951, 18, 290–293. [Google Scholar]
- Rowe, G. Phase Angle Determination and Interrelationships. In Proceedings of the Bituminous Materials 7th International RILEM Symposium, Rhodes, Greece, 27–29 May 2009; pp. 43–52. [Google Scholar]
- Tanakizadeh, A.; Shafabakhsh, G. Viscoelastic characterization of aged asphalt mastics using typical performance grading tests and rheological-micromechanical models. Constr. Build. Mater. 2018, 188, 88–100. [Google Scholar] [CrossRef]
- Dickinson, E.J.; Witt, H.P. The dynamic shear modulus of paving asphalts as a function of frequency. J. Rheol. 1974, 18, 591–606. [Google Scholar] [CrossRef]
- Christensen, D.W.; Anderson, D.A. Interpretation of dynamic mechanical test data for paving grade asphalt cements (with discussion). Assoc. Asphalt Paving Technol. Proc. 1992, 61, 67–116. [Google Scholar]
- Marasteanu, M.O.; Anderson, D.A. Improved Model for Bitumen Rheological Characterization, Eurobitume Workshop on Performance Related Properties for Bituminous Binders; European Bitumen Association: Brussels, Belgium, 1999; p. 133. [Google Scholar]
- Tschoegl, N.W. The Phenomenological Theory of Linear Viscoelastic Behavior: An. Introduction; Springer: New York, NY, USA, 1989; ISBN 9783642736025. [Google Scholar]
- Booij, H.C.; Thoone, G. Generalization of Kramers-Kronig transforms and some approximations of relations between viscoelastic quantities. Rheol. Acta 1982, 21, 15–24. [Google Scholar] [CrossRef]
- Rowe, G.M.; Khoee, S.H.; Blankenship, P.; Mahboub, K. Evaluation of aspects of E* test by using hot-mix asphalt specimens with varying void contents. Transp. Res. Rec. 2009, 2127, 164–172. [Google Scholar] [CrossRef]
- Mensching, D.J.; Rowe, G.M.; Sias Daniel, J. A mixture-based Black Space parameter for low-temperature performance of hot mix asphalt. Road Mater. Pavement Des. 2017, 18 (Suppl. 1), 404–425. [Google Scholar] [CrossRef]
- Oshone, M.; Dave, E.; Daniel, J.S.; Rowe, G.M. Prediction of phase angles from dynamic modulus data and implications for cracking performance evaluation. Road Mater. Pavement Des. 2017, 18 (Suppl. 4), 491–513. [Google Scholar] [CrossRef]
- Liu, H.Q.; Luo, R. Development of master curve models complying with linear viscoelastic theory for complex moduli of asphalt mixtures with improved accuracy. Constr. Build. Mater. 2017, 152, 259–268. [Google Scholar] [CrossRef]
- Nobakht, M.; Sakhaeifar, M.S. Dynamic modulus and phase angle prediction of laboratory aged asphalt mixtures. Constr. Build. Mater. 2018, 190, 740–751. [Google Scholar] [CrossRef]
- Nguyen, Q.T.; Di Benedetto, H.; Sauzéat, C.; Tapsoba, N. Time temperature superposition principle validation for bituminous mixes in the linear and nonlinear domains. J. Mater. Civ. Eng. 2013, 25, 1181–1188. [Google Scholar] [CrossRef]
- Zhang, F.; Wang, L.; Li, C.; Xing, Y.M. The Discrete and Continuous Retardation and Relaxation Spectrum Method for Viscoelastic Characterization of Warm Mix Crumb Rubber-Modified Asphalt Mixtures. Materials 2020, 13, 3723. [Google Scholar] [CrossRef]
- Standard Method of Test for Determining the Dynamic Modulus and Flow Number for Asphalt Mixture Using the Asphalt Mixture Performance Tester; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2015.
- Painter, P.C.; Coleman, M.M. Fundamentals of Polymer Science: An Introductory Text, 2nd ed.; CRC Press: Boca Raton, FL, USA, 1997; ISBN 9781351446396. [Google Scholar]
- Williams, M.L.; Landel, R.F.; Ferry, J.D. The temperature dependence of relaxation mechanisms in amorphous polymers and other glass-forming liquids. J. Am. Chem. Soc. 1955, 77, 3701–3707. [Google Scholar] [CrossRef]
- Yang, X.; You, Z.P. New Predictive Equations for Dynamic Modulus and Phase Angle Using a Nonlinear Least-Squares Regression Model. J. Mater. Civ. Eng. 2015, 27, 04014131. [Google Scholar] [CrossRef]
- Zhu, H.R.; Sun, L.; Yang, J.; Chen, Z.W.; Gu, W.J. Developing master curves and predicting dynamic modulus of polymer-modified asphalt mixtures. J. Mater. Civ. Eng. 2011, 23, 131–137. [Google Scholar] [CrossRef]
- Zhao, Y.Q.; Liu, H.; Bai, L.; Tan, Y.Q. Characterization of linear viscoelastic behavior of asphalt concrete using complex modulus model. J. Mater. Civ. Eng. 2013, 25, 1543–1548. [Google Scholar] [CrossRef]
- Ferry, J.D. Viscoelastic Properties of Polymers, 3rd ed.; John Wiley & Sons: New York, NY, USA, 1980; ISBN 9780471048947. [Google Scholar]
- Lu, X.; Isacsson, U. Rheological characterization of styrene-butadiene-styrene copolymer modified bitumens. Constr. Build. Mater. 1997, 11, 23–32. [Google Scholar] [CrossRef]
- Di Benedetto, H.; Olard, F.; Sauzéat, C.; Delaporteet, B. Linear viscoelastic behaviour of bituminous materials: From binders to mixes. Road Mater. Pavement Des. 2004, 5, 163–202. [Google Scholar] [CrossRef]
- Pellinen, T.K. Investigation of the Use of Dynamic Modulus as an Indicator of Hot-Mix Asphalt Performance; Arizona State University: Phoenix, AZ, USA, 2001; ISBN 9780493132181. [Google Scholar]
- Rowe, G.; Baumgardner, G.; Sharrock, M. Functional Forms for Master Curve Analysis. In Proceedings of the Bituminous Materials 7th International RILEM Symposium, Rhodes, Greece, 27–29 May 2009; pp. 43–52, ISBN 9780415558563. [Google Scholar]
- Rahman, A.; Tarefder, R.A. Dynamic modulus and phase angle of warm-mix versus hot-mix asphalt concrete. Constr. Build. Mater. 2016, 126, 434–441. [Google Scholar] [CrossRef]
- Podolsky, J.H.; Williams, R.C.; Cochran, E. Effect of corn and soybean oil derived additives on polymer-modified HMA and WMA master curve construction and dynamic modulus performance. Int. J. Pavement Res. Technol. 2018, 11, 541–552. [Google Scholar] [CrossRef]
- Chailleux, E.; Ramond, G.; Such, C.; de La Roche, C. A mathematical-based master-curve construction method applied to complex modulus of bituminous materials. Road Mater. Pavement Des. 2006, 7, 75–92. [Google Scholar] [CrossRef]
- Rouleau, L.; Deu, J.F.; Legay, A.; Le Lay, F. Application of Kramers–Kronig relations to time–temperature superposition for viscoelastic materials. Mech. Mater. 2013, 65, 66–75. [Google Scholar] [CrossRef]
- Hossain, M.D.; Ngo, H.; Guo, W. Introductory of Microsoft Excel SOLVER function-spreadsheet method for isotherm and kinetics modelling of metals biosorption in water and wastewater. J. Water Sustain. 2013, 3, 223–237. [Google Scholar] [CrossRef]
- Brinson, H.F.; Brinson, L.C. Polymer Engineering Science and Viscoelasticity: An Introduction, 2nd ed.; Springer: New York, NY, USA, 2015; ISBN 9781489974853. [Google Scholar]
- Yusoff, N.I.M.; Jakarni, F.M.; Nguyen, V.H.; Hainin, M.R.; Airey, G.D. Modelling the rheological properties of bituminous binders using mathematical equations. Constr. Build. Mater. 2013, 40, 174–188. [Google Scholar] [CrossRef]
- Oshone, M.T. Performance Based Evaluation of Cracking in Asphalt Concrete Using Viscoelastic and Fracture Properties; University of New Hampshire: Durham, NH, USA, 2018; ISBN 9780438035508. [Google Scholar]
- Mensching, D.J. Developing Index Parameters for Cracking in Asphalt Pavements Through Black Space and Viscoelastic Continuum Damage Principles; University of New Hampshire: Durham, NH, USA, 2015; ISBN 9781321837490. [Google Scholar]
- Wang, H.; Zhan, S.H.; Liu, G.J. The effects of asphalt migration on the dynamic modulus of asphalt mixture. Appl. Sci. 2019, 9, 2747. [Google Scholar] [CrossRef]
- Yu, D.; Gu, Y.X.; Yu, X. Rheological-microstructural evaluations of the short and long-term aged asphalt binders through relaxation spectra determination. Fuel 2020, 265, 116953. [Google Scholar] [CrossRef]
- Krishnan, J.M.; Rajagopal, K.R. Triaxial testing and stress relaxation of asphalt concrete. Mech. Mater. 2004, 36, 849–864. [Google Scholar] [CrossRef]
- Park, S.W.; Schapery, R.A. Methods of interconversion between linear viscoelastic material functions. Part I-A numerical method based on Prony series. Int. J. Solids Struct. 1999, 36, 1653–1675. [Google Scholar] [CrossRef]




















| Aggregate | 10–20 mm | 5–10 mm | 3–5 mm | 0–3 mm | Filler |
|---|---|---|---|---|---|
| Blend Percentage by Weight/% | 21 | 38 | 10 | 28 | 3 |
| Asphalt Mixture | OAC/% | Gross Density g/cm³ | Theoretical Density g/cm³ | Void/% | VMA/% | VFA/% | Stability/KN | Flow Value/mm |
|---|---|---|---|---|---|---|---|---|
| HMA-60 | 5.4 | 2.439 | 2.537 | 3.86 | 14.04 | 72.5 | 10.45 | 2.74 |
| WMA-60 | 5.4 | 2.442 | 2.538 | 3.78 | 13.93 | 72.8 | 10.95 | 2.87 |
| HMA-C | 5.6 | 2.441 | 2.546 | 4.12 | 14.15 | 70.9 | 11.23 | 2.45 |
| WMA-C | 5.6 | 2.444 | 2.546 | 4.01 | 14.04 | 71.5 | 11.61 | 2.62 |
| Standard | - | - | - | 3–5 | ≥ 13 | 65–75 | ≥ 8 | 2–4 |
| Mixture Type | Parameters | Correlation | |||||
|---|---|---|---|---|---|---|---|
| HMA-60 | 1.77 | 2.70 | −0.55 | −0.53 | 182899 | 0.998 | 0.911 |
| WMA-60 | 2.18 | 2.30 | −0.14 | −0.29 | 158243 | 0.999 | 0.853 |
| HMA-C | 2.13 | 2.29 | −0.53 | −0.63 | 170479 | 0.998 | 0.976 |
| WMA-C | 2.18 | 2.34 | −0.26 | −0.55 | 174171 | 0.999 | 0.918 |
| Mixture Type | Parameters | Correlation | ||||||
|---|---|---|---|---|---|---|---|---|
| HMA-60 | 1.83 | 2.55 | −0.51 | −0.67 | 9.68 | 95.12 | 0.998 | 0.928 |
| WMA-60 | 2.19 | 2.24 | −0.14 | −0.62 | 21.02 | 221.02 | 0.999 | 0.901 |
| HMA-C | 2.15 | 2.24 | −0.53 | −0.68 | 21.94 | 214.27 | 0.998 | 0.978 |
| WMA-C | 2.24 | 2.19 | −0.28 | −0.64 | 15.40 | 150.75 | 0.999 | 0.951 |
| Mixture Type | Parameters | Correlation | ||||||
|---|---|---|---|---|---|---|---|---|
| HMA-60 | 1.80 | 2.59 | −0.53 | −0.65 | 0.00092 | −0.1061 | 0.998 | 0.945 |
| WMA-60 | 2.19 | 2.24 | −0.16 | −0.62 | 0.00042 | −0.0957 | 0.999 | 0.891 |
| HMA-C | 2.15 | 2.25 | −0.53 | −0.66 | 0.00044 | −0.1033 | 0.998 | 0.980 |
| WMA-C | 2.23 | 2.19 | −0.29 | −0.64 | 0.00064 | −0.1037 | 0.999 | 0.953 |
| Mixture Type | Parameters | Correlation | ||||||
|---|---|---|---|---|---|---|---|---|
| HMA-60 | 1.70 | 2.86 | −0.54 | −0.47 | 0.80 | 182721 | 0.998 | 0.922 |
| WMA-60 | 2.33 | 2.10 | −0.10 | −0.62 | 0.82 | 158255 | 0.999 | 0.876 |
| HMA-C | 2.10 | 2.44 | −0.54 | −0.50 | 0.55 | 170464 | 0.999 | 0.982 |
| WMA-C | 2.30 | 2.23 | −0.31 | −0.52 | 0.58 | 174172 | 0.999 | 0.923 |
| Mixture Type | Parameters | Correlation | |||||||
|---|---|---|---|---|---|---|---|---|---|
| HMA-60 | 1.62 | 2.84 | −0.60 | −0.56 | 0.80 | 8.93 | 87.75 | 0.999 | 0.935 |
| WMA-60 | 2.29 | 2.13 | −0.14 | −0.62 | 0.81 | 19.14 | 202.14 | 0.999 | 0.884 |
| HMA-C | 2.12 | 2.40 | −0.54 | −0.51 | 0.51 | 19.13 | 187.95 | 0.999 | 0.978 |
| WMA-C | 2.33 | 2.14 | −0.31 | −0.56 | 0.52 | 14.02 | 138.11 | 0.999 | 0.955 |
| Mixture Type | Parameters | Correlation | |||||||
|---|---|---|---|---|---|---|---|---|---|
| HMA-60 | 1.69 | 2.79 | −0.57 | −0.55 | 0.8 | 0.00094 | −0.1060 | 0.999 | 0.948 |
| WMA-60 | 2.29 | 2.14 | −0.15 | −0.61 | 0.75 | 0.00046 | −0.0954 | 0.999 | 0.903 |
| HMA-C | 2.11 | 2.43 | −0.55 | −0.50 | 0.51 | 0.00050 | −0.1029 | 0.999 | 0.981 |
| WMA-C | 2.32 | 2.17 | −0.33 | −0.55 | 0.50 | 0.00069 | −0.1033 | 0.999 | 0.964 |
| i | HMA-60 | WMA-60 | HMA-C | WMA-C | ||||
|---|---|---|---|---|---|---|---|---|
| ρi | Ei | ρi | Ei | ρi | Ei | ρi | Ei | |
| 1 | 2 × 10−5 | 3852.1 | 2 × 10−5 | 2650.0 | 2 × 10−5 | 3087.9 | 2 × 10−5 | 4910.2 |
| 2 | 2 × 10−4 | 5434.5 | 2 × 10−4 | 4580.1 | 2 × 10−4 | 5998.5 | 2 × 10−4 | 5693.3 |
| 3 | 2 × 10−3 | 6061.5 | 2 × 10−3 | 5233.2 | 2 × 10−3 | 5665.0 | 2 × 10−3 | 5464.6 |
| 4 | 2 × 10−2 | 3680.0 | 2 × 10−2 | 3208.0 | 2 × 10−2 | 4254.5 | 2 × 10−2 | 3717.2 |
| 5 | 2 × 10−1 | 1751.0 | 2 × 10−1 | 1476.5 | 2 × 10−1 | 2239.5 | 2 × 10−1 | 1920.1 |
| 6 | 2 | 566.5 | 2 | 610.9 | 2 | 1054.3 | 2 | 758.0 |
| 7 | 2 × 101 | 223.2 | 2 × 101 | 271.7 | 2 × 101 | 394.9 | 2 × 101 | 318.4 |
| 8 | 2 × 102 | 35.8 | 2 × 102 | 105.4 | 2 × 102 | 165.9 | 2 × 102 | 120.9 |
| 9 | 2 × 103 | 11.8 | 2 × 103 | 40.4 | 2 × 103 | 30.0 | 2 × 103 | 32.8 |
| 10 | 2 × 104 | 5.3 | 2 × 104 | 10.1 | 2 × 104 | 4.1 | 2 × 104 | 7.91 |
| 11 | 2 × 105 | 1.9 | 2 × 105 | 1.2 | 2 × 105 | 1.5 | 2 × 105 | 1.65 |
| Ee = 121.58 | Ee = 193.10 | Ee = 183.34 | Ee = 209.75 | |||||
| i | HMA-60 | WMA-60 | HMA-C | WMA-C | ||||
|---|---|---|---|---|---|---|---|---|
| τj | Dj | τj | Dj | τj | Dj | τj | Dj | |
| 1 | 2.40 × 10−5 | 5.70 × 10−5 | 2.30 × 10−5 | 5.69 × 10−7 | 2.30 × 10−5 | 4.97 × 10−6 | 2.50 × 10−5 | 8.82 × 10−6 |
| 2 | 2.82 × 10−4 | 3.12 × 10−5 | 2.80 × 10−4 | 2.79 × 10−5 | 2.80 × 10−4 | 2.01 × 10−5 | 2.90 × 10−4 | 2.32 × 10−5 |
| 3 | 3.72 × 10−3 | 5.46 × 10−5 | 3.63 × 10−3 | 6.83 × 10−5 | 3.31 × 10−3 | 4.00 × 10−5 | 3.47 × 10−3 | 5.04 × 10−5 |
| 4 | 4.47 × 10−2 | 1.66 × 10−4 | 4.27 × 10−2 | 1.55 × 10−4 | 3.98 × 10−2 | 1.04 × 10−4 | 4.07 × 10−2 | 1.24 × 10−4 |
| 5 | 5.50 × 10−1 | 3.94 × 10−4 | 4.37 × 10−1 | 3.45 × 10−4 | 4.37 × 10−1 | 2.41 × 10−4 | 4.57 × 10−1 | 2.91 × 10−4 |
| 6 | 5.10 | 1.05 × 10−4 | 4.07 | 7.66 × 10−4 | 4.68 | 6.04 × 10−4 | 4.27 | 6.74 × 10−4 |
| 7 | 4.90 × 101 | 2.01 × 10−3 | 3.63 × 101 | 1.23 × 10−3 | 4.17 × 101 | 1.32 × 10−3 | 3.80 × 101 | 1.23 × 10−3 |
| 8 | 2.63 × 102 | 3.00 × 10−3 | 2.95 × 102 | 1.60 × 10−3 | 3.72 × 102 | 1.43 × 10−3 | 3.09 × 102 | 1.21 × 10−3 |
| 9 | 2.15 × 103 | 1.66 × 10−3 | 2.40 × 103 | 1.01 × 10−3 | 2.34 × 103 | 1.01 × 10−3 | 2.34 × 103 | 3.28 × 10−4 |
| 10 | 2.09 × 104 | 2.68 × 10−4 | 2.09 × 104 | 3.34 × 10−3 | 2.04 × 104 | 2.94 × 10−4 | 2.09 × 104 | 1.00 × 10−4 |
| 11 | 2.04 × 105 | 1.70 × 10−5 | 2.04 × 105 | 3.94 × 10−5 | 2.04 × 105 | 5.94 × 10−6 | 2.04 × 105 | 2.47 × 10−6 |
| Dg = 4.60 × 10−5 | Dg = 5.4 × 10−5 | Dg = 4.33 × 10−5 | Dg = 4.41 × 10−5 | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, F.; Wang, L.; Li, C.; Xing, Y. Predict the Phase Angle Master Curve and Study the Viscoelastic Properties of Warm Mix Crumb Rubber-Modified Asphalt Mixture. Materials 2020, 13, 5051. https://doi.org/10.3390/ma13215051
Zhang F, Wang L, Li C, Xing Y. Predict the Phase Angle Master Curve and Study the Viscoelastic Properties of Warm Mix Crumb Rubber-Modified Asphalt Mixture. Materials. 2020; 13(21):5051. https://doi.org/10.3390/ma13215051
Chicago/Turabian StyleZhang, Fei, Lan Wang, Chao Li, and Yongming Xing. 2020. "Predict the Phase Angle Master Curve and Study the Viscoelastic Properties of Warm Mix Crumb Rubber-Modified Asphalt Mixture" Materials 13, no. 21: 5051. https://doi.org/10.3390/ma13215051
APA StyleZhang, F., Wang, L., Li, C., & Xing, Y. (2020). Predict the Phase Angle Master Curve and Study the Viscoelastic Properties of Warm Mix Crumb Rubber-Modified Asphalt Mixture. Materials, 13(21), 5051. https://doi.org/10.3390/ma13215051