1. Introduction
Composite materials are increasingly replacing more traditional materials like steel, wood and aluminium in a wide range of applications. From the eighties till the end of the previous century, composite materials were introduced successfully in dynamically loaded structures like satellites, military aircrafts, expensive cars, boats, sporting and many consumer goods. As a result of marked developments and improvements in manufacturing methods, robot assistance and quality control systems, composites are now employed in major structural parts of civil aircrafts and vehicles [
1,
2]. The success of composites is due to their excellent mechanical properties like high stiffness to weight ratio and high strength to weight ratio, combined with good fatigue resistance. Furthermore, composites offer significant design freedom which allows tailoring of mechanical properties and creation of entirely new shapes. Unfortunately, the mechanics of composites are much more complex than mechanics of traditional isotropic materials. A good introduction to mechanics of composites is given in the book written by Jones [
3]. The advancement of composite materials occurred hand in hand with the advancement in computer power and software. In particular, modern finite element software packages are vital in current design of composite structures. Fibre-reinforced composites are mainly used as laminates in dynamically loaded structures. The fundamental building block of laminates is the lamina. A layer in a laminate can be built up with several laminas with the same orientation. Each layer in the laminate can possibly be composed of other materials and may have different orientations and thicknesses. The layers in general exhibit orthotropic material behaviour. In a finite element (FE) model, all layers can be modelled separately. This however requires a huge number of degrees of freedom in the numerical model, which translates to significant increase in memory requirements and computation time. A more economical solution is to represent the laminates by their global laminate stiffness. The computation of the laminate stiffness can be executed at a pre-processing stage using laminate analysis programs.
Finite element analysis of a structure often requires knowledge and input of both the damping behaviour and other relevant material properties into the FE program. Material damping can be defined as ‘the phenomenon of energy dissipation due to inelastic behaviour of a macroscopically uniform material’ Lazan [
4]. This definition does not include structural energy dissipation due to, among others, friction between contacting surfaces within a structure, friction in mechanical joints and aerodynamic damping, which are phenomena that are classified under the more general header of ‘structural damping’. An early discussion of modelling and measuring damping was given by Bert [
5]. For engineering applications, composite materials like fibre-reinforced plastics are considered as homogeneous from a macroscopic point of view, so that the energy dissipation within the material satisfies the definition of material damping. An early overview of modelling and measuring damping in composite materials was given by Adams [
6]. A more recent overview of available literature on damping in composite materials can be found in an article by Treviso et al. [
7].
Material damping in fibre-reinforced polymers is a very complex phenomenon. It is due to a variety of contributions which can be distinguished into contributions from the following sources:
The viscoelastic behaviour of the polymer matrix materials;
The inelastic behaviour of the fibres;
The inelastic behaviour of the interphase between fibre and matrix;
The slip at the fibre/matrix interface in case of non-perfect adhesion;
Thermo-elastic behaviour of fibres and matrix;
The volume fractions of matrix and fibre.
Because of the complexity of these different mechanisms, theoretical models to predict quantitatively the material damping of composites are usually cumbersome. If good experimental equipment is available, it is more reliable to measure the damping properties on test specimens. For laminates the damping mechanism becomes even more complex because of the possible delaminations and other interlaminar effects between layers. All methods for predicting the damping of laminates require the damping properties of single layer materials. The quality of the prediction of the entire laminate damping hence relies strongly on the quality of the used single layer material properties.
Many papers to predict laminate damping are based on the elastic-viscoelastic correspondence principle first introduced by Hashin [
8,
9,
10]. According to this elastic-viscoelastic correspondence principle, the formulae for calculation of the complex moduli and stiffness’s of composites are similar as those for the calculation of their elastic counterparts.
In an early paper, Ni and Adams [
11] developed a model to predict damping of composite laminates. The experimental values for the layer properties included the elastic and damping values of the longitudinal and transverse Young’s moduli and the shear modulus. These values were measured on clamped beams in flexural and torsional mode shapes. Only the elastic part of Poisson ratio could be measured. The damping part of Poisson ratio was assumed to be zero. All experimental values were measured on composites test beams with a known volume fraction for the matrix and fibre. Micromechanical models were used to predict the elastic and damping values of the same composite materials as the volume fraction varies. Experimental verification was executed on laminated beams in flexural mode shapes. The zero damping of Poisson’s value for the damping was assumed by most authors, since this value cannot be revealed by beam testing. In an effort to overcome this problem, Jong [
12] developed a closed form of the solution for the basic damping for Poisson’s ratio. This enabled him to show the influence of the damping part of Poisson ratio on computed laminate damping.
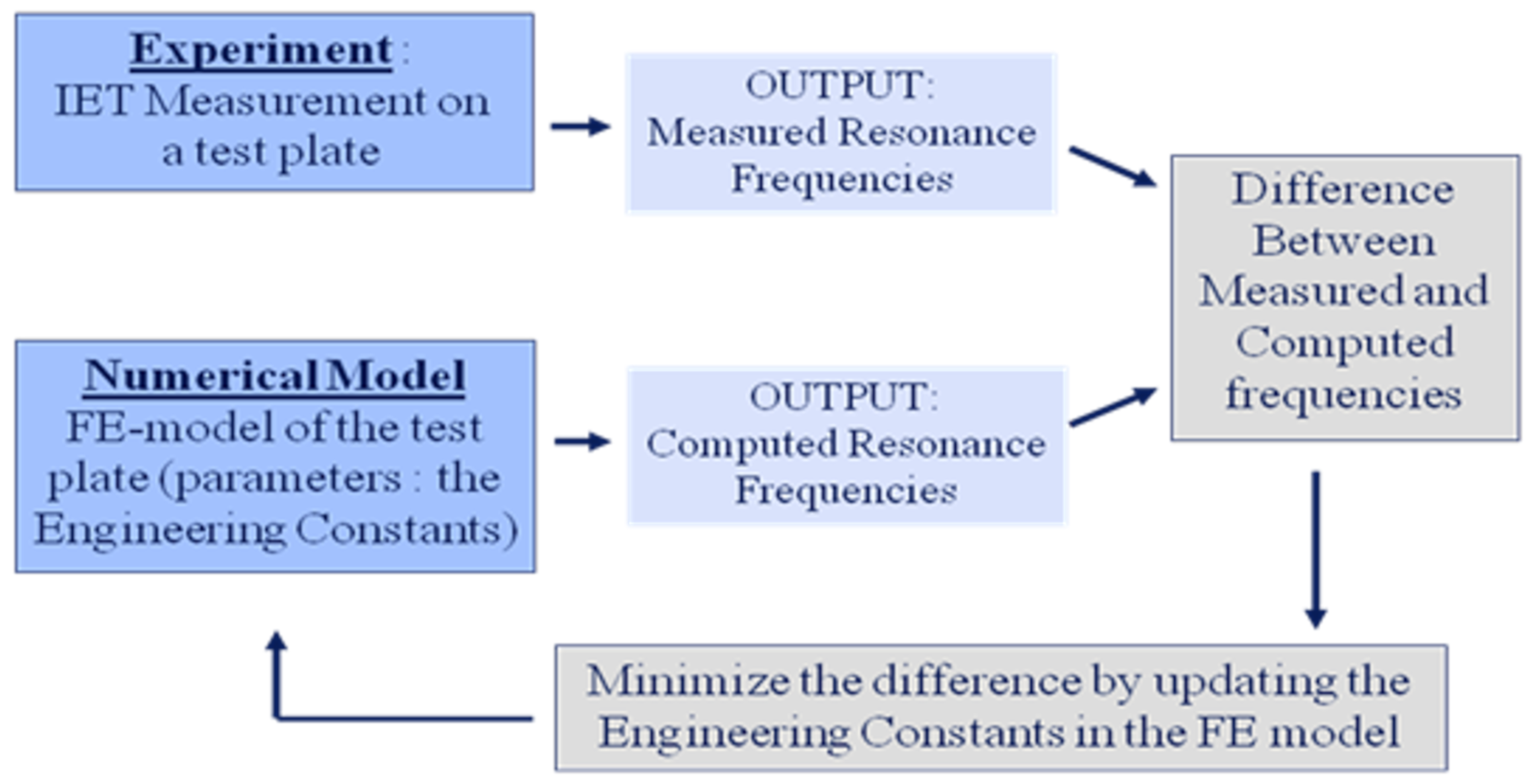
Plates in composite materials are more natural test specimens than beams since they require less preparation and machining and show less influence of stress concentrations and delaminations at the free boundaries. Since analytical solutions for the vibration of orthotropic plates are not available, mixed numerical experimental methods must be used for material identification. In a mixed numerical experimental method, measured vibration quantities like resonance frequencies and damping ratios are compared with similar values computed with a numerical model. The material properties in the numerical model are tuned in such a way that the computed values match the experimental observations. The availability of powerful personal computers has promoted this new approach. The earliest article describing the use of rectangular test plates for the identification of elastic orthotropic moduli of composite material using a mixed numerical experimental method was published by De Wilde and Sol in 1985 [
13] and later refined by Sol [
14] in 1986. Rayleigh Ritz trial functions were used in the numerical model of rectangular test plates. McIntyre and Woodhouse applied a test procedure on plates to identify not only the elastic but also the damping material properties of composite sheets in 1988 [
15]. Other similar early studies were published by Deobald and Gibson [
16]. Talbot and Woodhouse [
17] proposed a solution for laminate damping by adopting the elastic-viscoelastic correspondence principle, first introduced by Hashin [
8]. The laminate damping was computed using classical laminate theory with the same formulas as for the laminate stiffness properties. El Mahi et al. [
18] used a finite element model for the identification of elastic and damping values of laminates. They discussed the influence of boundary conditions and concluded that free-free boundary conditions of plates are to be preferred. More recently, Wesolowski and Barkanov [
19] also used the elastic-viscoelastic correspondence principle in combination with a mixed numerical experimental method. The paper focused on improving the experiment by eliminating the contribution of air friction to the damping value of the tested laminate. The test was executed in vacuum and the dynamic response was measured contactless with a laser vibrometer. The authors did not take the phase angle of Poisson ratio into account. Marchetti et al. [
20] used a laminate model considering linear shear, membrane and bending effects in each layer. The developments used in the paper are based on the analytical multilayer model of Guyader and Lesueur (JSV, 1978). The authors observed good correspondence with experiments in a large frequency band (up to 20 kHz).
A major problem with most of the mixed numerical experimental methods is the necessity to know the correct sequence of mode shapes. To compare measured frequencies and damping ratios with numerical simulations (sometimes with poor starting values), the sequence of computed mode shapes must be the same as in the experiment. This requires the identification of the mode shapes by modal analysis or at least by detecting the position of the nodal lines of the mode shapes. Basic knowledge of modal analysis is described among others in the book by He and Fu [
21]. Mode shape measurements and detection of nodal lines are labour intensive and often based on trial and error. Another weak point of mixed numerical methods is that many mode shapes are not sensitive to Poisson’s ratio. Taking more mode shapes of the test plate into account does not solve this problem, since higher mode shapes have increased complex patterns and therefore are more influenced by transverse shear and inertia rotations. This requires numerical thick plate models and additional elastic and damping values associated with transverse shear, which are difficult to identify. The above mentioned problems were solved with the introduction of the Resonalyser method by Sol et al. [
22,
23]. The Resonalyser method allows fixing the mode shape sequence and assures enough sensitivity to Poisson’s ratio. The Resonalyser method uses simultaneously multiple models including two test beams and a rectangular test plate. The results of the Resonalyser method were intensively compared with values from standard testing by Lauwagie et al. [
24] and found to be very accurate. The first applications of the Resonalyser method identified only the elastic orthotropic material properties. De Visscher [
25] presented an extension of the Resonalyser method including the identification of the damping properties of orthotropic material properties.
This paper describes as a first step the identification of the complex engineering constants of a single laminate layer. The capabilities of a new and improved version of the Resonalyser method to identify the orthotropic elastic and damping properties of single layer composite material sheets with minimal experimental equipment is demonstrated. Measured resonance frequencies and associated damping ratios of two test beams and a test plate are compared with similar values computed with the finite element method. The orthotropic elastic and damping material properties in the finite element models of the beams and the plate are simultaneously updated in such a way that the computed resonances and damping ratios match all the measured values. This paper introduces for the first time an improvement for the existing Resonalyser method by generating good starting values based on the virtual field method. The virtual field method is described in detail in the book by Pierron and Grediac in [
26].
In a next step, the paper shows how to compute the stiffness and damping properties of laminates with the elastic-viscoelastic correspondence principle using previously identified single layer properties. The complex laminate stiffness values are used to predict the modal damping ratio of rectangular plates by finite element simulation. Many experimental values of damping measurements on laminated test beams can be found in literature [
6,
11,
12,
20]. Unfortunately, no fully documented experimental values could be found by the authors for damping measurements on test plates.
The described approach to predict laminate damping values is validated experimentally on a test set of laminated plates. The test set includes laminated plates with arbitrary sizes and different composite materials (autoclaved carbon/epoxy, glass/polyester made with hand layup and glass epoxy processed with Resin Transfer Moulding (RTM).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}