1. Introduction
Research devoted to the issue of loss of stability of systems that are elements of load-bearing structures used in technology, generally focuses on problems related to determining the value of critical loads. Analyses of post-critical conditions of structures become much more rarely the subjects thereof. This is due to the fact that in the vast majority of technical fields, the moment of loss of stability by the structure is identified with its destruction [
1,
2].
In aviation technology, due to the very specific nature of the objects under consideration, specific standards affecting design processes and operational assumptions have also been established. One of the principles, referring to the most commonly used in aviation metal structures, allows for post-critical deformations of selected types of systems, in the scope of operational loads [
3,
4].
In the general case, due to the need to minimize the mass of the object, loss of stability of the covering under operating conditions is allowed, if this phenomenon is elastic and occurs locally, i.e., within the shell segment limited by skeleton elements. The exceptions are coverings, e.g., of wing torsion box and other parts of the structure responsible for ensuring its appropriate torsional stiffness, as well as fragments of coverings, where large deformations are not desirable due to the need to maintain the aerodynamic properties [
5,
6].
Many years of research on aircraft structures, initiated by the Junkers construction office, have shown that limiting the area of post-critical deformations can be realized not only by increasing the number of skeleton elements. In many cases, an equally effective way to ensure the local nature of the phenomena has been the use of various forms of integral stiffeners.
Although light metal systems are still the basic components of most of the aircraft load-bearing structures in operation, a clear tendency has emerged in recent years to increase the use of different types of composites. Layer composites are the most commonly used in aviation, based on glass, carbon and aramid fabrics, as well as polymeric resins [
7].
Due to insufficient knowledge about the overall changes in the mechanical properties of composites caused by their long-term exploitation, the bearing structures based on them for many years were designed and implemented as shell-like, using the spacers to prevent loss of stability by bearing coverings. At present, in the pursuit of meeting increasingly strict operational and economic criteria, the design doctrine allowing the local loss of stability of some fragments of composite coverings is considered, e.g., in the case of metal. This type of assumption allows the use of semi-monocoque structures characterized by more favorable mechanical properties in relation to the mass than the layered monocoque structures [
8,
9].
The permissibility of loss of stability of composite coverings causes similar structural problems to appear as in the case of metal. One of them is the necessity to reduce this phenomenon, with as little weight increase as possible. Achieving this goal is possible through the use of stiffeners of an integral or "quasi-integral" nature.
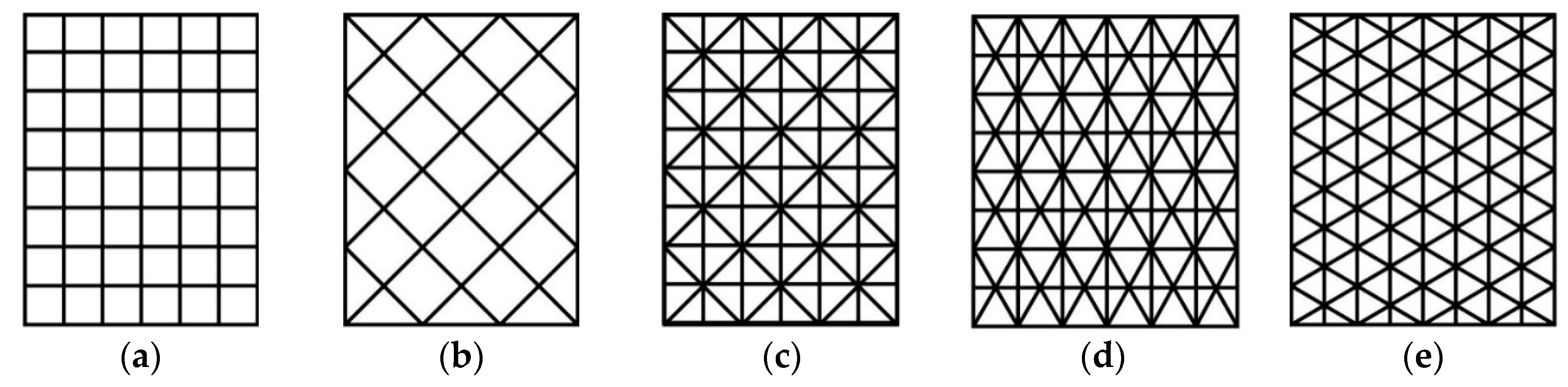
The forms of integral stiffeners, which allow to obtain a significant increase in the stiffness of the covering, as well as relatively high values of critical loads, are grid structures (
Figure 1).
In the case of metal structures, the use of this type of solution is due to the need for precision machining, quite problematic (the need for precision machining). It is much simpler to realize it in the case of composite structures. As results from the published research results, the interest in constructors is focused mainly on isogrid structures [
10,
11]. Also, in the field of their applications, a number of experiments and numerical calculations have been made in composite constructions [
12,
13]. It should be emphasized, however, that in most cases the subject matter of the publication is limited to analyses of cylindrical shells subjected to compression. In the case of load-bearing systems used in aviation, the reason for the loss of stability of thin-walled systems is primarily torsion. This study focuses on the problem of local loss of stability of twisted shells, under the conditions of permissible loads and on post-buckling analysis.
2. Materials and Methods
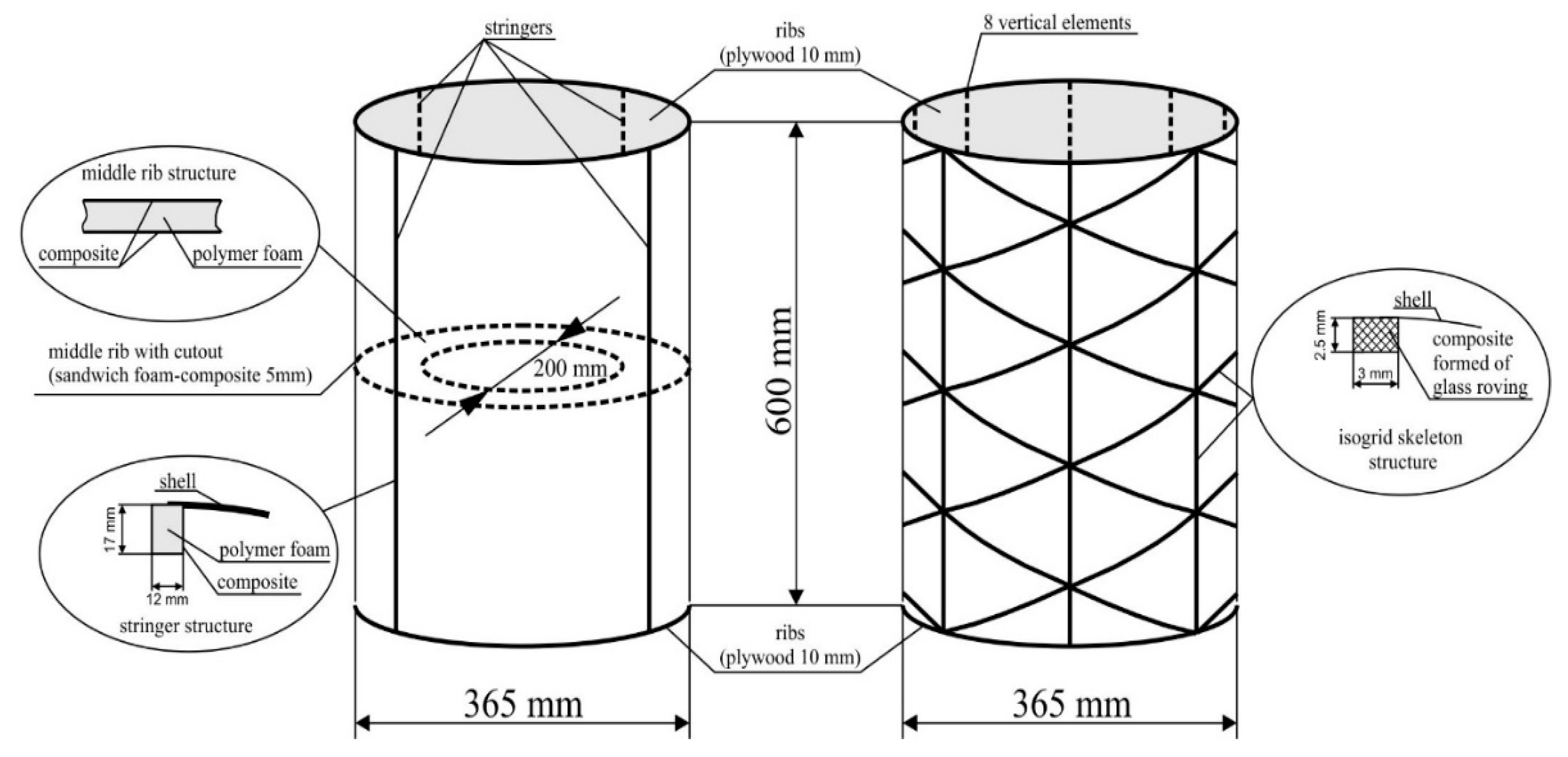
The aim of the research presented in this study was to perform a comparative analysis of two types of structural solutions of the aircraft structure fragment, represented by a thin-walled cylindrical structure with a composite covering, subject to post-critical deformations under operating conditions. The subject of the study were constitutions of equal dimensions (
Figure 2), differing in structural solutions of the skeleton. The first of them was a reference structure with a stiffening corresponding to a classic semi-monocoque structure, consisting of four stringers and three ribs. External ribs were made of plywood; the mechanical properties are obtained with the constants defined in the aviation standards: E1 = 8500 MPa, E2 = 7500 MPa, G12 = 1000 MPa, ν12 = 0.34.
The second system had Type 2 isogrid stiffening. In both cases the shell of the model for experimental research was made as a composite structure which consisted of two layers of glass fabrics: 50 and 163 g/m2. Stringers of the reference structures were made as a closed circuit formed of two layers of glass fabric with a weight of 163 g/m2. The middle of every circuit was filled with polymer foam. The symmetric glass fabrics Interglass 02037 and 92110 were used to build the models. The matrix was a filling mixture based on epoxy resin MGS L285/H286 with known mechanical properties. Mechanical properties of the composite were obtained with the measured solid constants: E11 = 22,000 MPa, E22 = 22,000 MPa, ν12 = 0.11, G12 = 4600 MPa. Models were made using the contact method, with a 50/50 reinforcement ratio. The main directions of the composite orthotropy were oriented at 45 degrees to the direction of the axis of the cylindrical structure.
As it was proved during laboratory tests of some types of glass fabrics and epoxy resins applied in aviation, the physical constants for the single layer composites are almost identical in case of different fabrics with different weights [
14]. So, the measured constants characterizes the behavior of each of layers.
The isogrid skeleton was formed by means of glass roving fibers in a polymeric mold, using the aforementioned filling mixture.
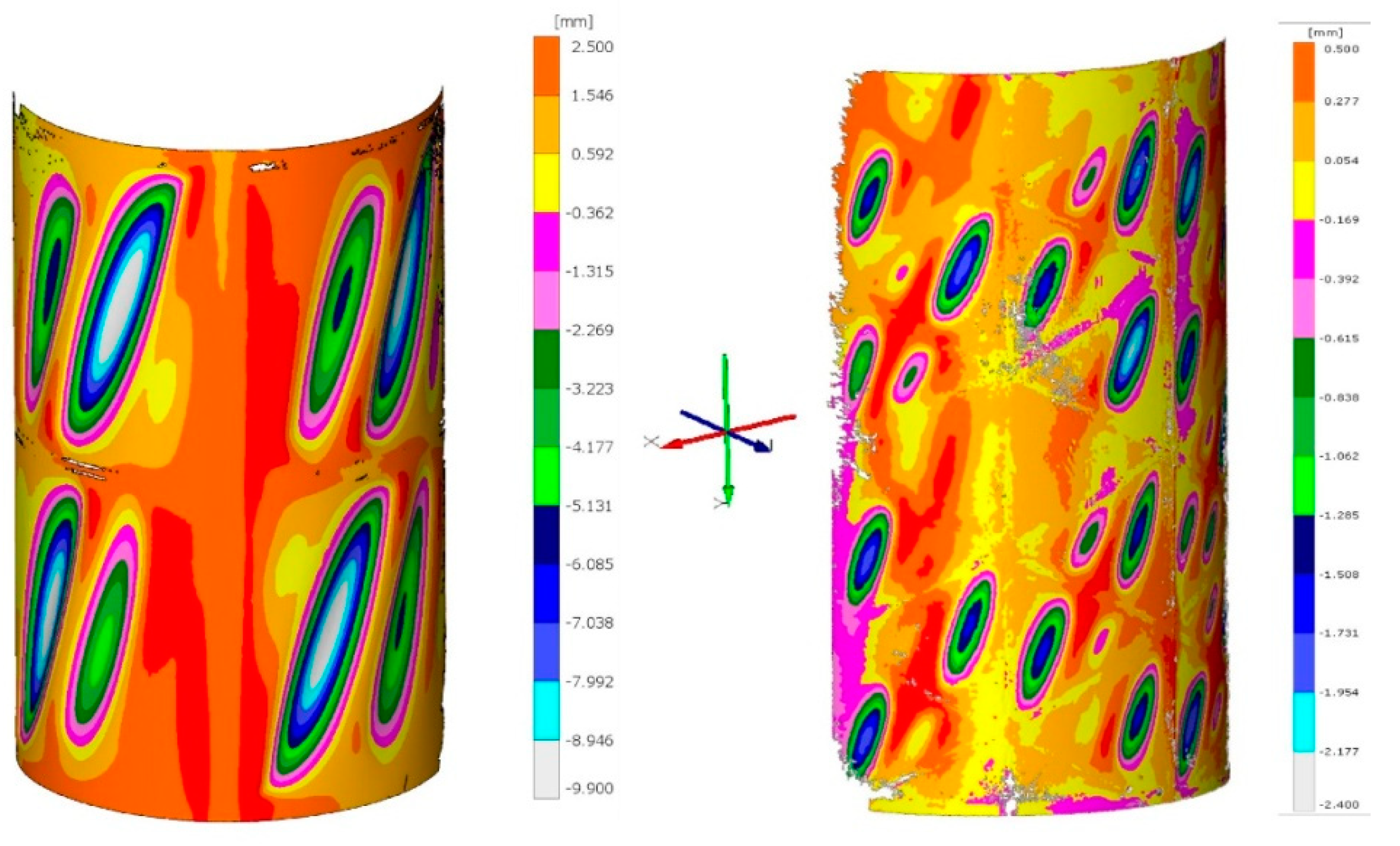
The aim of the comparative analyses was to examine the differences between the character of post-critical deformations in both types of structures and the preliminary estimation of the impact of the form and size of deformations on the operational durability of the tested systems.
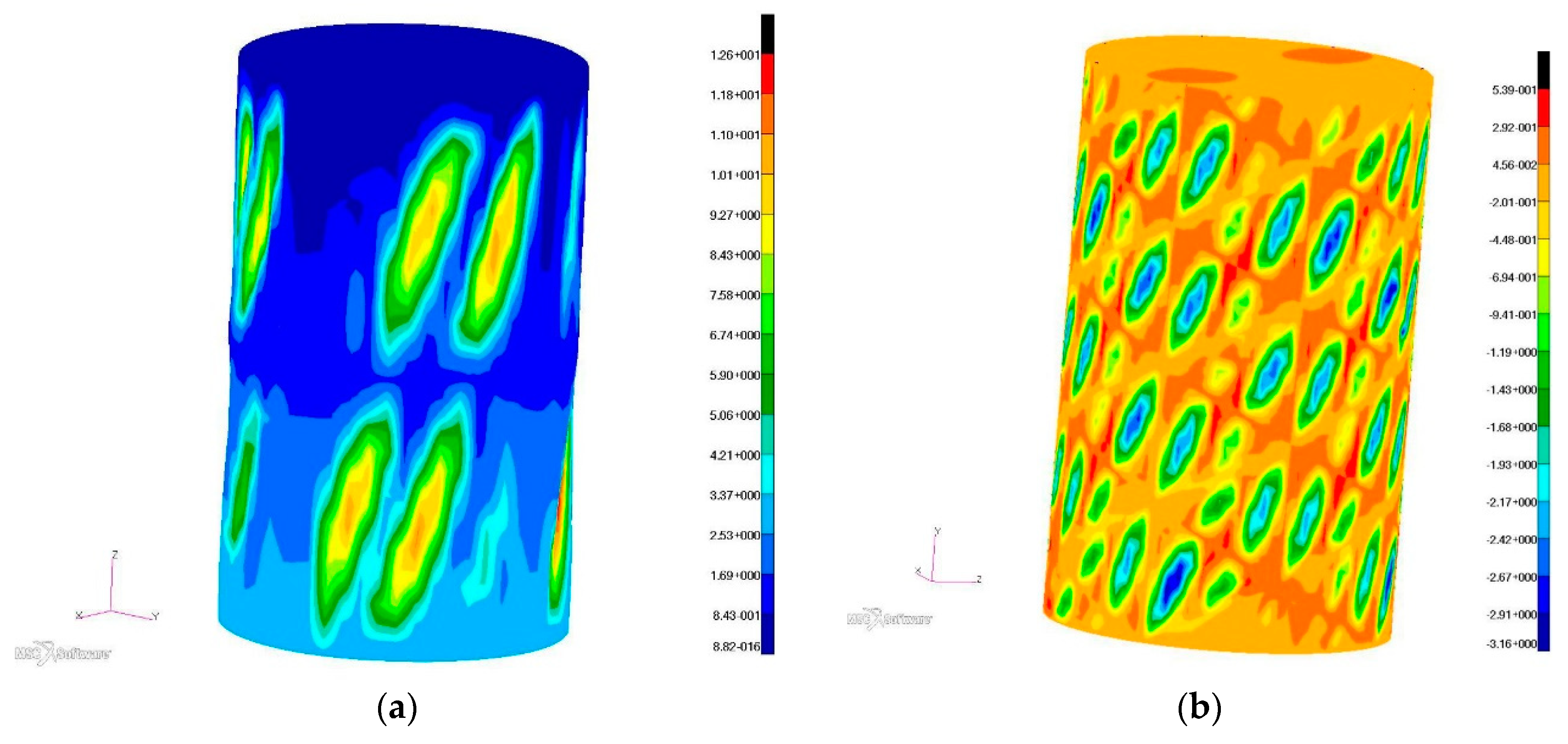
The results of numerical analyses were evaluated by accepting the criterion of satisfactory similarity of the nature of post-critical deformations and representative equilibrium paths with reference to the results of the experiment. As a result, it became possible to determine stress distributions, based on the principle of unambiguity of solutions, according to which for an elastic system the deformation of the structure is responsible for one and only one variant of stress distribution.
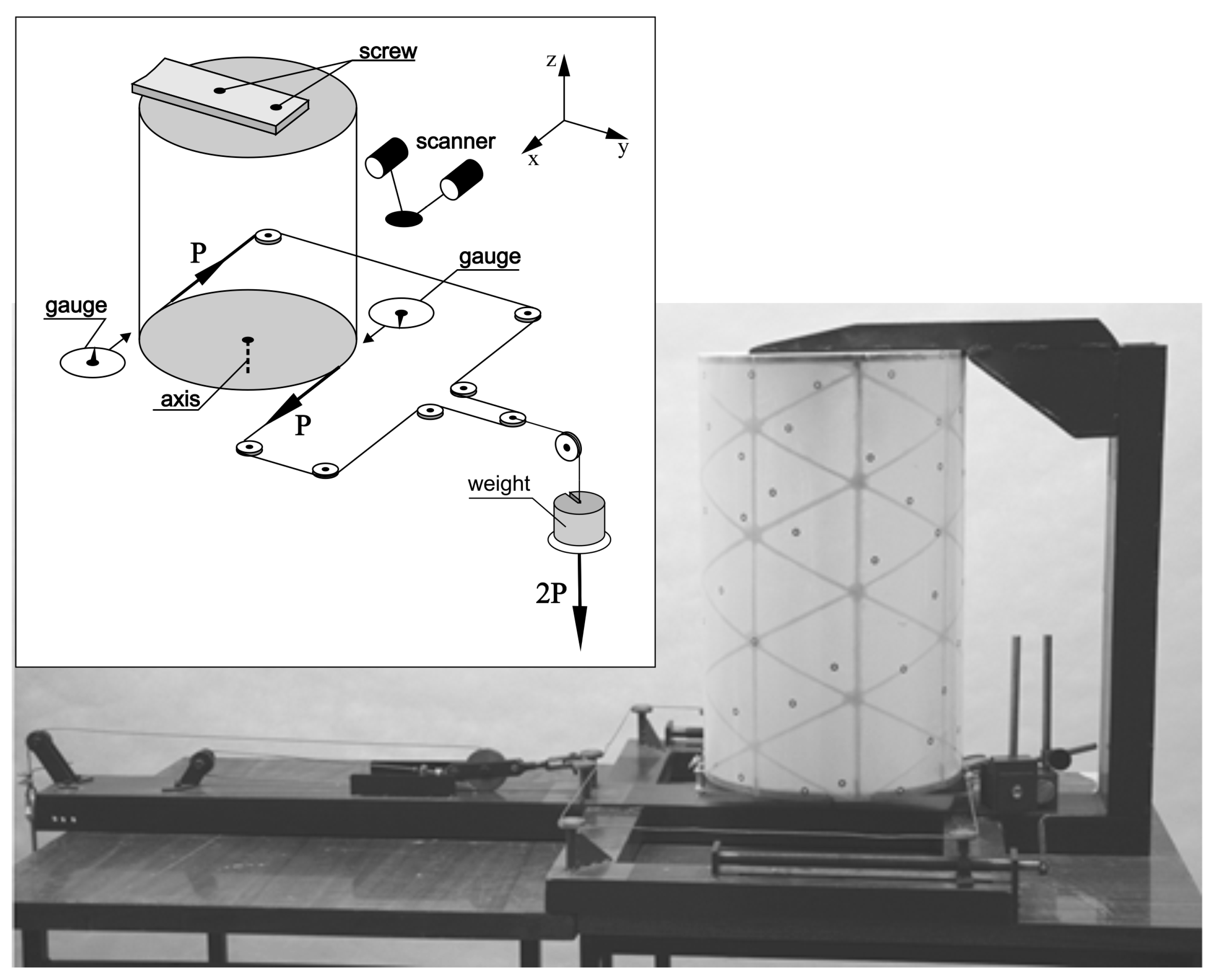
For the experiment, a special test stand was used, with high stiffness, whose own deformations can be considered negligibly small (
Figure 3). Loads were carried out in a gravitational manner. The ATOS optical scanner and micrometer sensors were used for structure deformation measurements, on the basis of which the total torsion angle of the structure was determined. Due to the load application method, subsequent measurements were made for determined deformation states of the structure.
The results of experimental research constituted the material allowing us to obtain information about stress distributions in the tested systems by developing effective, adequate computational models in terms of the finite element method.
Numerical modelling of the analyzed structures was based on the commercial MSC PATRAN/MARC software (version 2012, MSC Software, Newport Beach, CA, USA), which proved its effectiveness in the case of post-critical deformations analyses of coverings made of isotropic materials [
15]. In the case of layered composites, the key element of the software is an algorithm whose task is to determine the properties of the laminate, based on sets of constants corresponding to individual layers. In the case of commercial software used, this algorithm is an integral preprocessor procedure and does not allow the user to intervene.
The feature of composite structures which makes the creation of numerical mappings very difficult, is their heterogeneity, resulting not only from the conditions of lamination of individual layers, but also as a result of assembly operations, i.e., the presence of local surplus resin and varied thickness of glue joint. These factors may result in local changes in the stiffness of the covering and affect the form of post-critical deformations. Even small errors in the selection of geometric parameters of the numerical model, introducing a deviation from the actual boundary conditions of the shell segment, generate significant errors during non-linear analysis.
The basic relationship in a non-linear problem, defining the relationship between the state of the structure and the load is the so-called equilibrium path of the system, in general, a hypersurface in state hyperspace [
16,
17,
18]. It is a relation that satisfies the matrix equation of residual forces:
in which
is a state vector, containing the displacement components of the structure nodes corresponding to its current geometric configuration,
is a matrix containing control parameters corresponding to the current load level, while
is a residual vector containing unbalanced force components related to the current state of system deformation.
In general, excluding the singularities resulting from the shape of the equilibrium path, it can be assumed that there are continuous relationships between the values contained in the above equation. For Clapeyron systems, the vector r for a fixed parameter value
is defined as a gradient of total potential energy Π
of the system:
which expresses that the condition of the static equilibrium of the system under consideration is a zero increase in potential energy.
Equation (1) can also be presented in the form of relationship:
where
p is a matrix containing internal forces corresponding to the current state of deformation, while f is a vector of external forces, which may also depend on the current state of deformation, which can be presented in the form of equations:
where
p and
u are respectively elastic strain energy and the work of external loads. The total potential energy of the system is expressed by the equation:
Stiffness matrix
K of the system corresponding to the temporary, current configuration of the system is defined as a derivative of the residual vector r relative to the components of the state vector
u:
The K−1 inverse matrix is the system flexibility matrix. Excluding singularities corresponding to the characteristic points of the equilibrium path, both matrices are symmetric matrices.
By determining the derivative of the residual vector r relative to the control parameters, a control matrix, also called a load matrix, can be determined:
The concept of stepwise changes in the configuration of the structure corresponding to the staged increase in load results in the possibility of binding the matrix
u and
Λ with a dimensionless parameter determining the degree of task completion, called the pseudo-time parameter:
The derivative of the residual vector component r in relation to the pseudo-time—
t has the form:
where:
From the above compound and from dependences 6 and 7 the matrix equation follows:
By determining the second derivative of the residual vector
r relative to the pseudo-time parameter, we obtain:
where
and
are matrices:
In numerical algorithms for non-linear problems, all components of the matrix is expressed as functions a single parameter
λ, called the state control parameter. This parameter is a measure of the increase in the associated load, directly or indirectly, with the pseudo-time parameter—t. Thus, the equation of state 1 can be written in the form:
called the monoparametric equation of residual forces. The corresponding derivatives in relation to the pseudo-time can be written as follows:
where
is the defined by Equation (6) system stiffness matrix, also called the
tangent matrix to the equilibrium path, while:
is a
vector of load increase.
Because at each stage of the solution a static equilibrium of the system is assumed, the vector r in each stage assumes zero values and does not change in relation to pseudo-time. The following relationships result:
Thus, for all points of the equilibrium path (for which K is a non-singular matrix), the relationship resulting from the Equation (18) can be used:
where in
is a
vector of velocity of load increase.
The prediction-correction methods of determining the consecutive points of the equilibrium path used in modern programs also include the correction phase based on the fulfillment by the system of an additional equation, called the increment control equation or the constraint Equation (18):
where the increases:
correspond to the transition from state n to state n + 1.
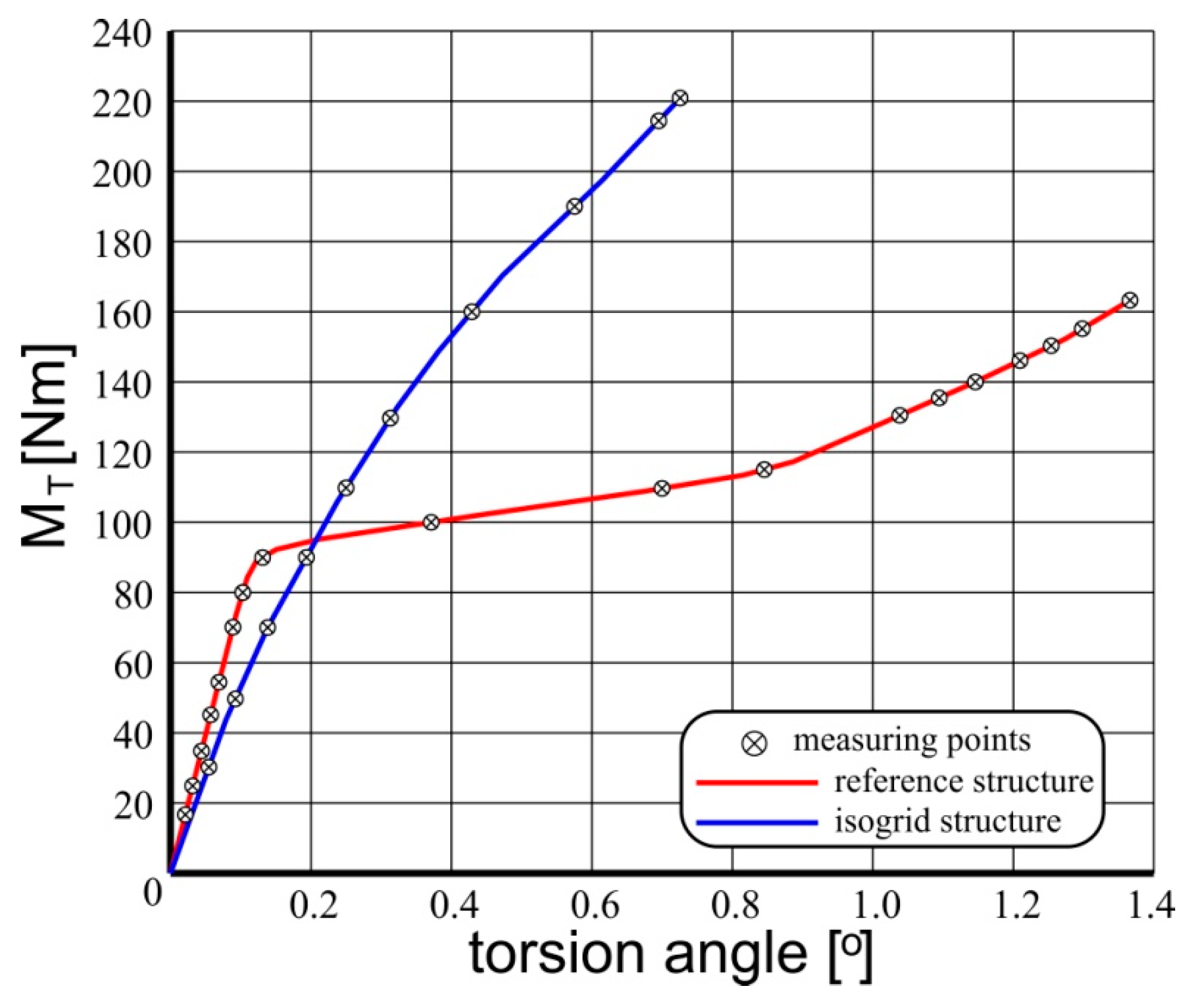
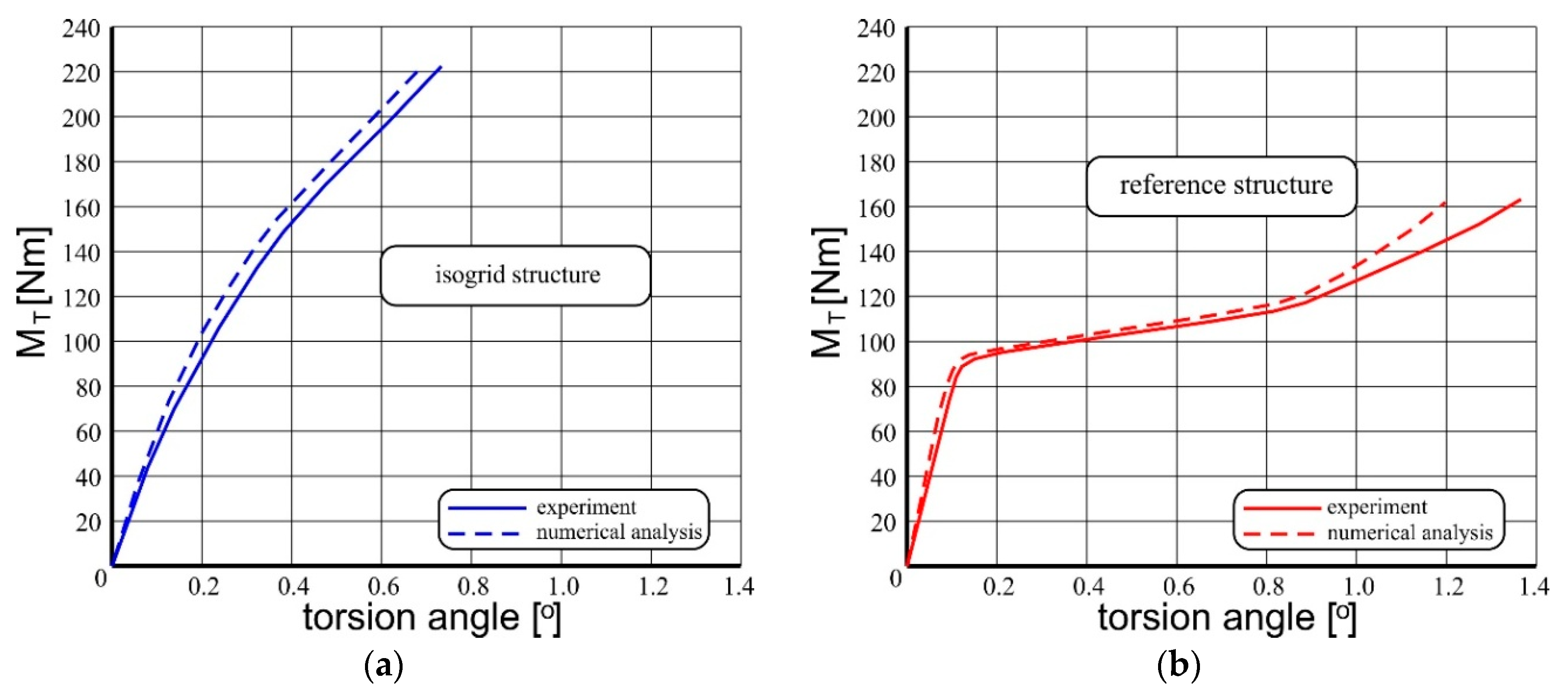
As in the case of the experiment, since in the case of systems with the number of freedom greater than 2, it is difficult to interpret the equilibrium path in a clear graph form, in practice, for comparative purposes, representative equilibrium paths are used, which are the relationships between the chosen parameter characterizing deformation the system and a single control parameter related to the load. As a confirmation of the reliability of the results of non-linear numerical analyses in terms of FEM, it is considered that satisfactory convergence between representative equilibrium paths: determined during the experiment and obtained on the numerical way. It is also necessary to converge the forms of deformations that are the effects of calculations with the result of the experiment. Based on the aforementioned principle of unambiguity of solutions, the distributions of effective stress in the deformed shell can also be considered reliable.
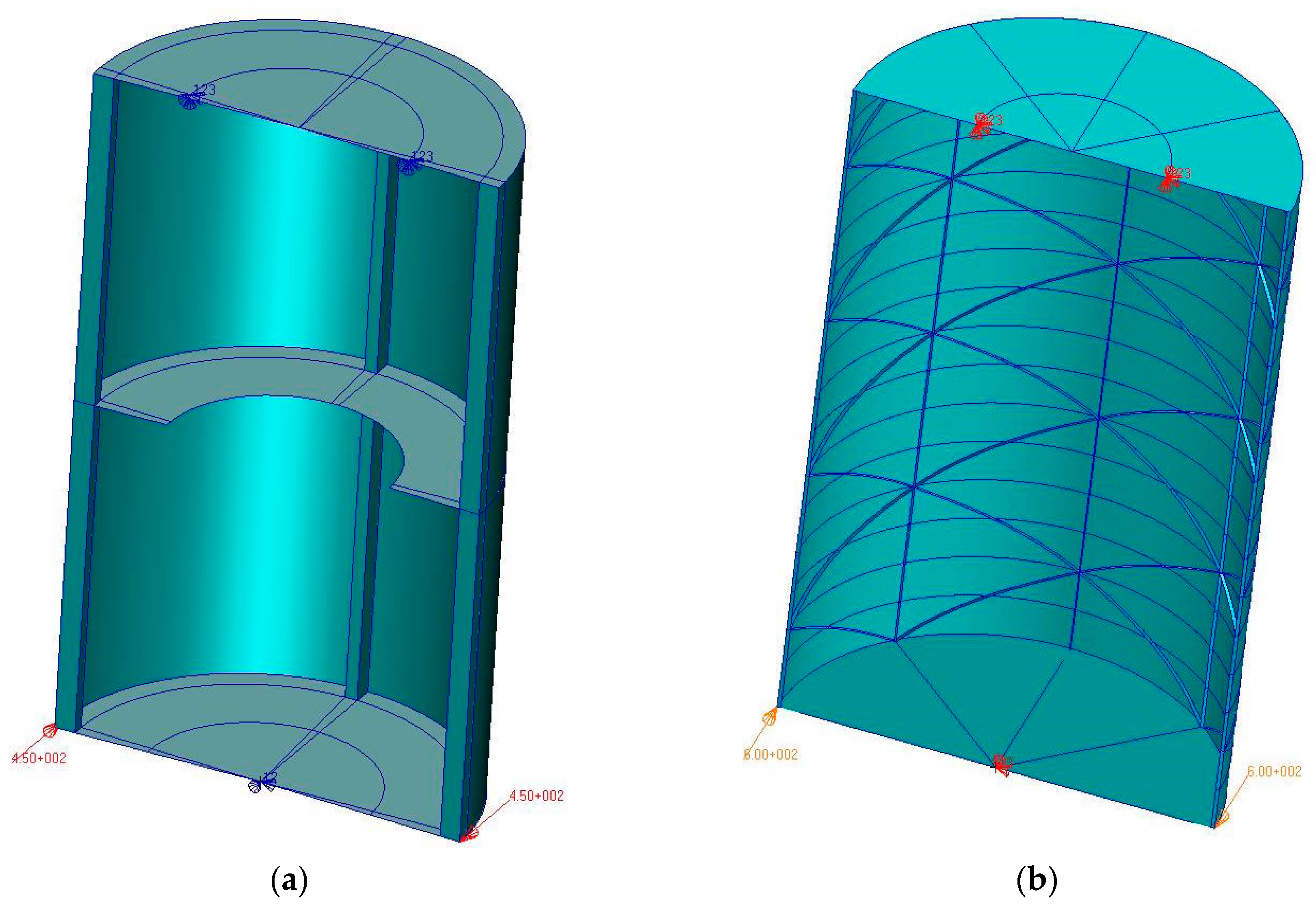
The geometric structure of numerical models was based mainly on surface objects. In the case of the reference model, three-dimensional objects were also used, to model the stringers (
Figure 4). It has to be emphasized that pictures below does not present complete models. Their present a half of each numerical model, for the better visualization of the structural details.
The use of this kind of solution resulted from the desire to map the actual proportions between the dimensions of the coverage segments.
The non-linear numerical analysis is an iterative process, aimed at determining subsequent equilibrium states, so its correctness is largely determined by the correct selection of the prediction method, correction strategy and a whole range of control parameters. In the described case, the Newton–Raphson method was used, related to the Crisfield hypersferrical correction [
16,
17].
After the series of numerical tests in the scope of choosing the topology of the model, the mesh consisting of about 3000 bilinear, four-node shell elements were used for the reference structure. The number of used elements was the result of analyses executed using various versions of the numerical models and it was a minimum providing the nonlinear analysis convergence and the compliance of results with the experiment. The necessity to a bilinear element resulted from the fact that other types of them, contained in the MSC MARC software library, which can be assigned to the properties of layered composites, do not have the ability to map geometrically complex objects, due to the type and number of degrees of freedom.
For the modeling of the stringers, in the case of the reference structure, a total of 120 three-dimensional, eight-node elements were used. The structure model stiffened integrally was based entirely on surface elements, most of which were 4–node ones, the total number of which was 8700.
The material models were made taking into account the mechanical properties of composites based on the components used during the experimental phase, with the constants given above.
The process of nonlinear numerical calculations was multistage and a lot of mesh variants were tested. The goal of this procedure was to obtain the solution reproducing the results of experiment, however, under this procedure a quality of the mesh was also tested and analyzed. The convergence of the mesh was verified first, before the comparison with the experimental results were carried out, to obtain an assurance that in case of any mesh refinement the results do not change significantly. Presented and described results were obtained by means of mesh variants, which were considered as verified.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








