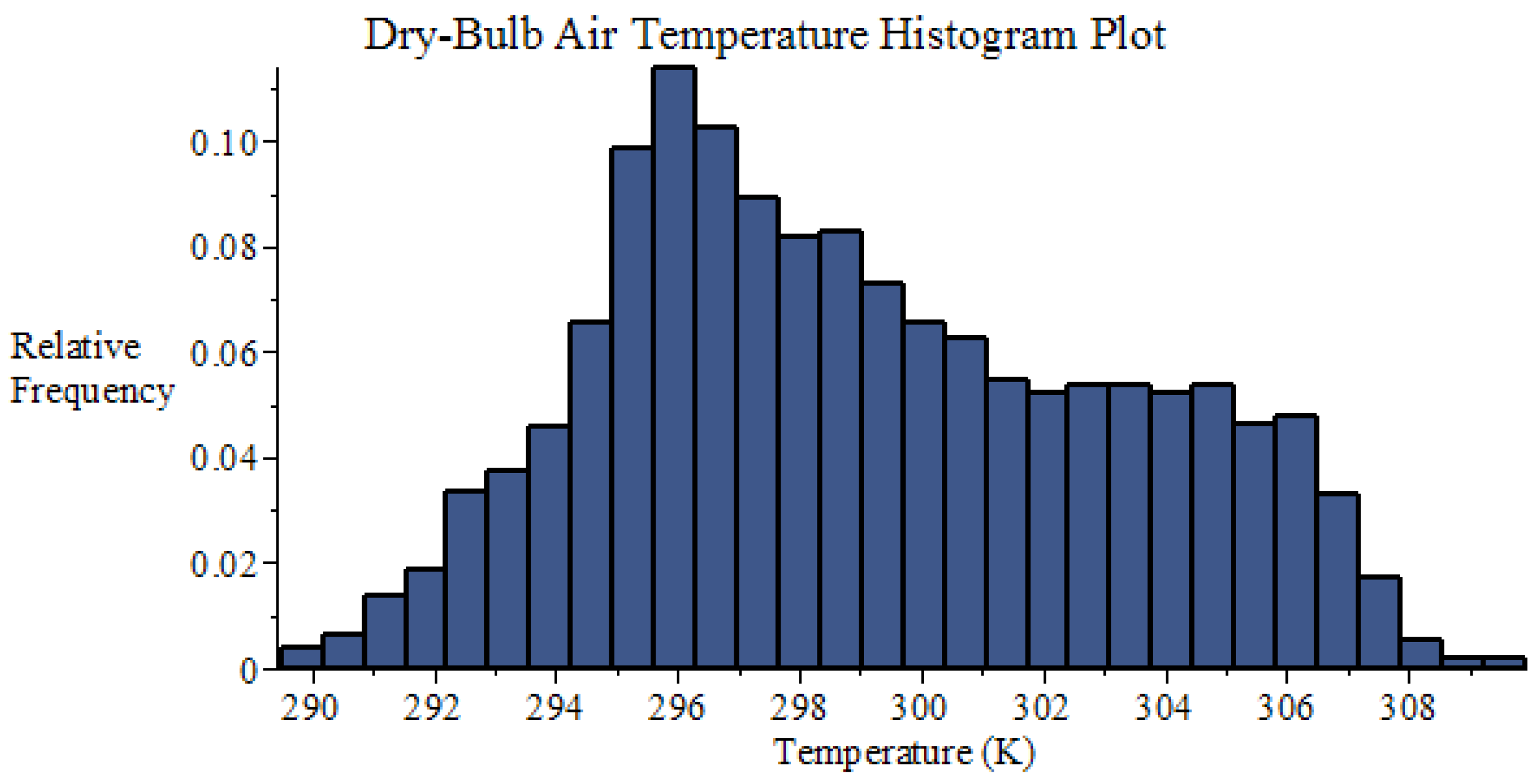
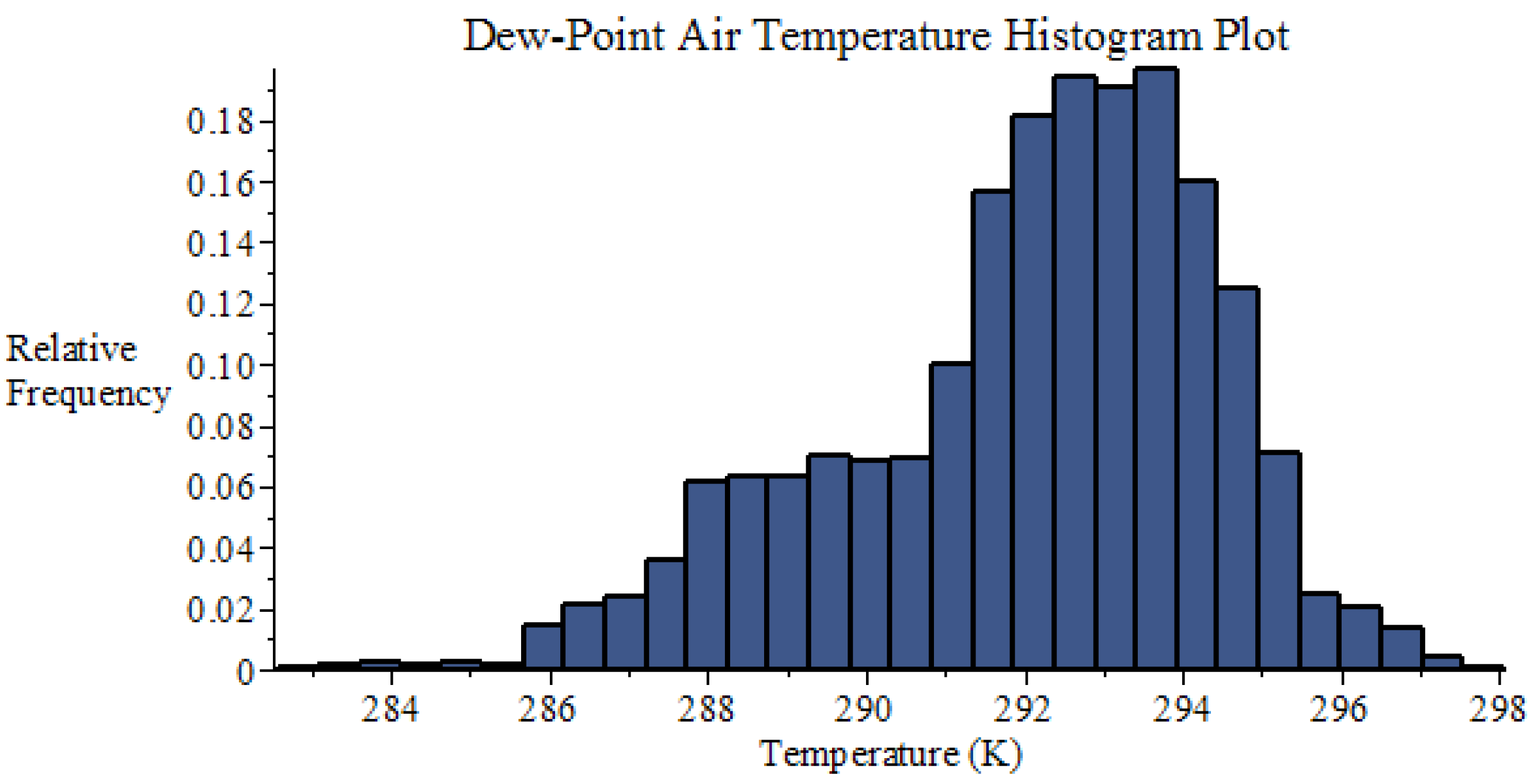
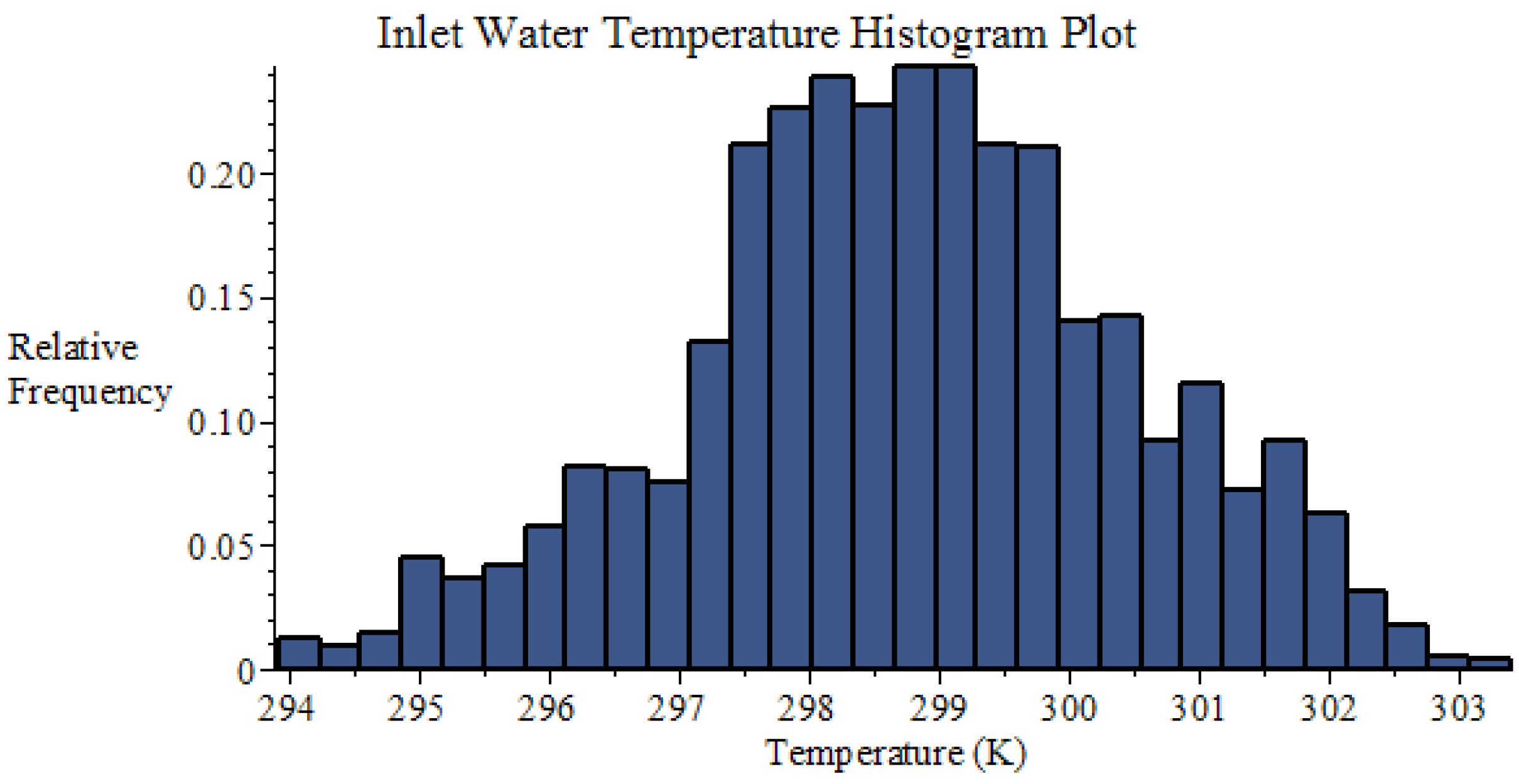
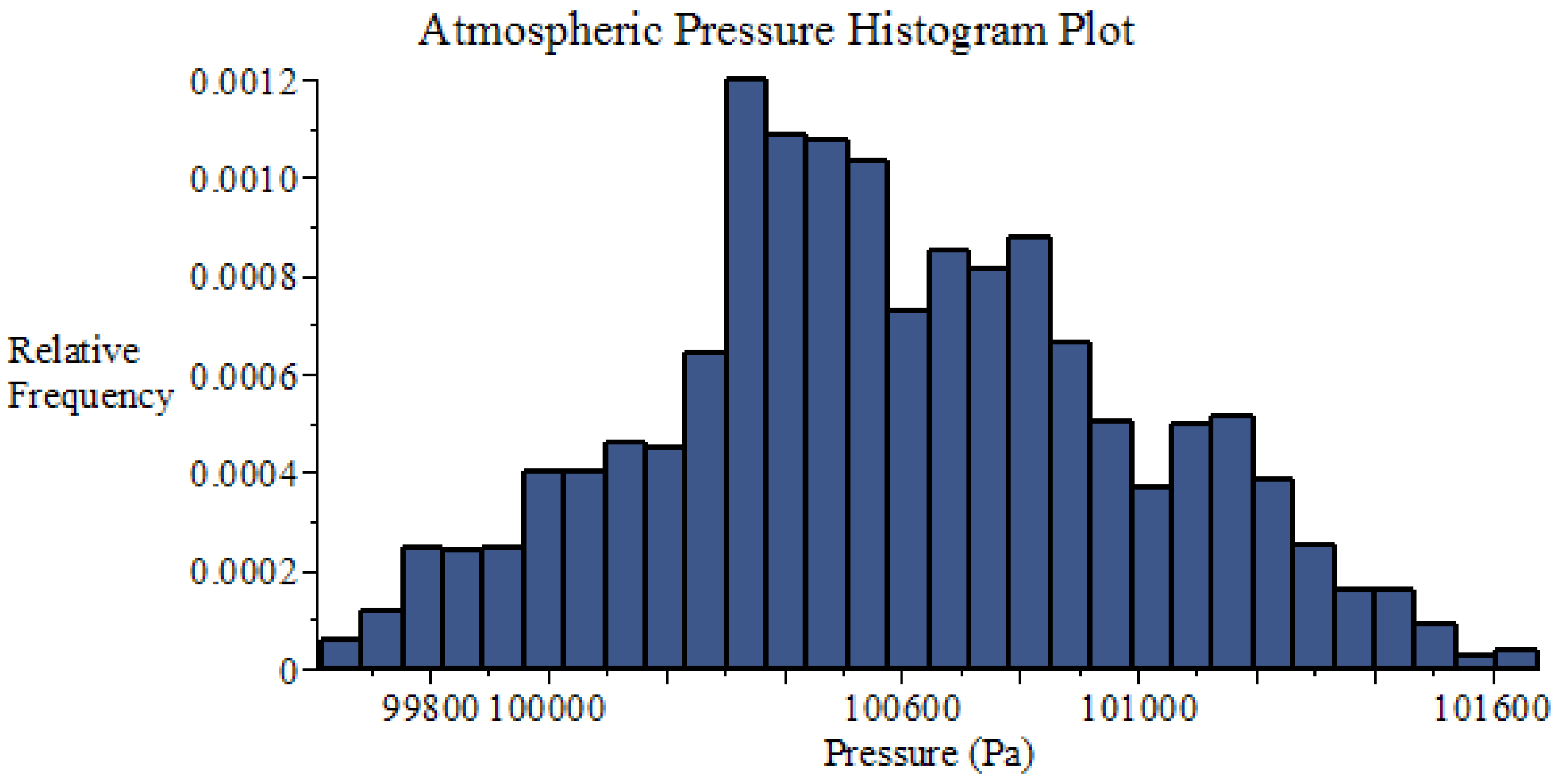
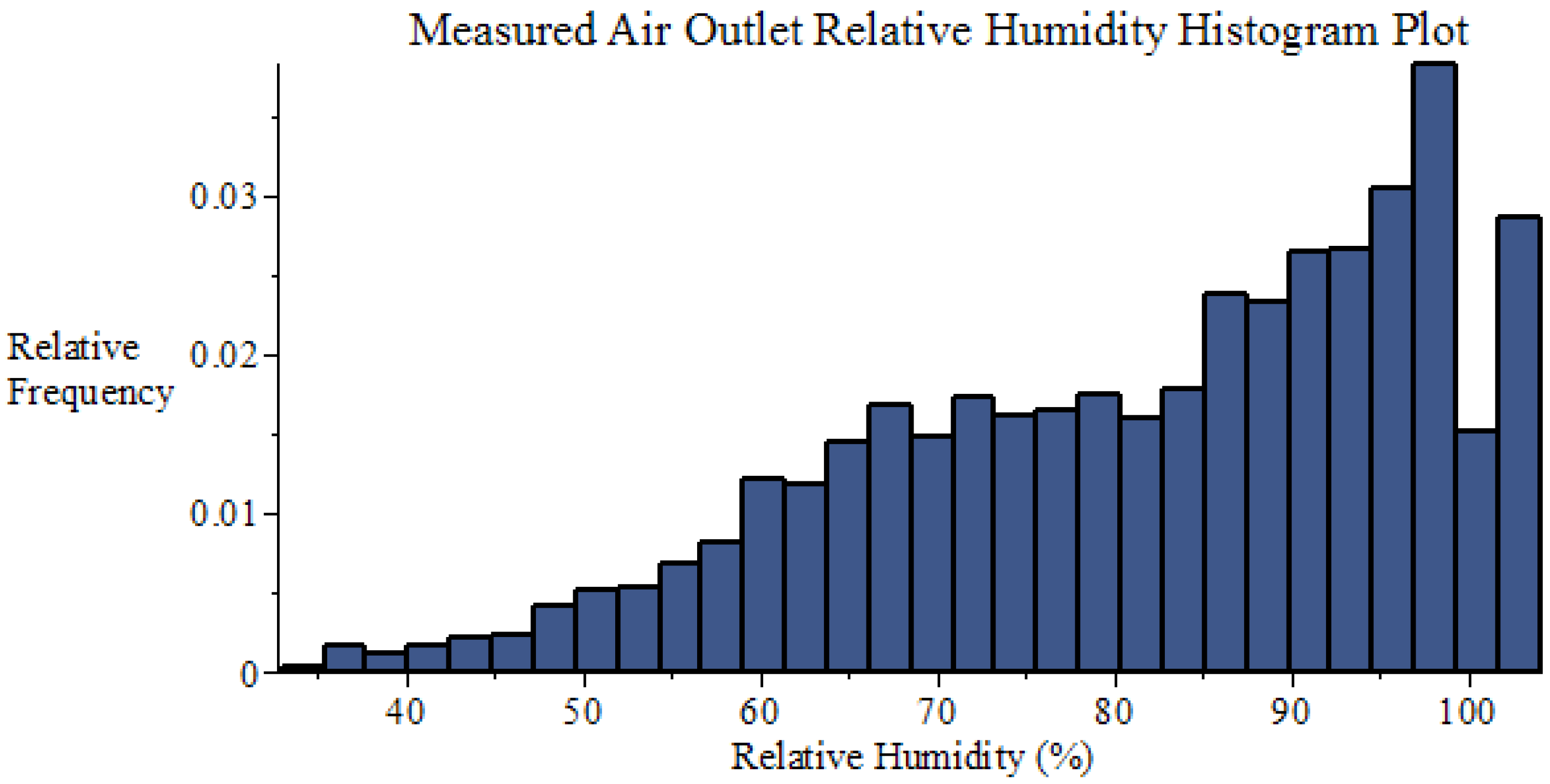
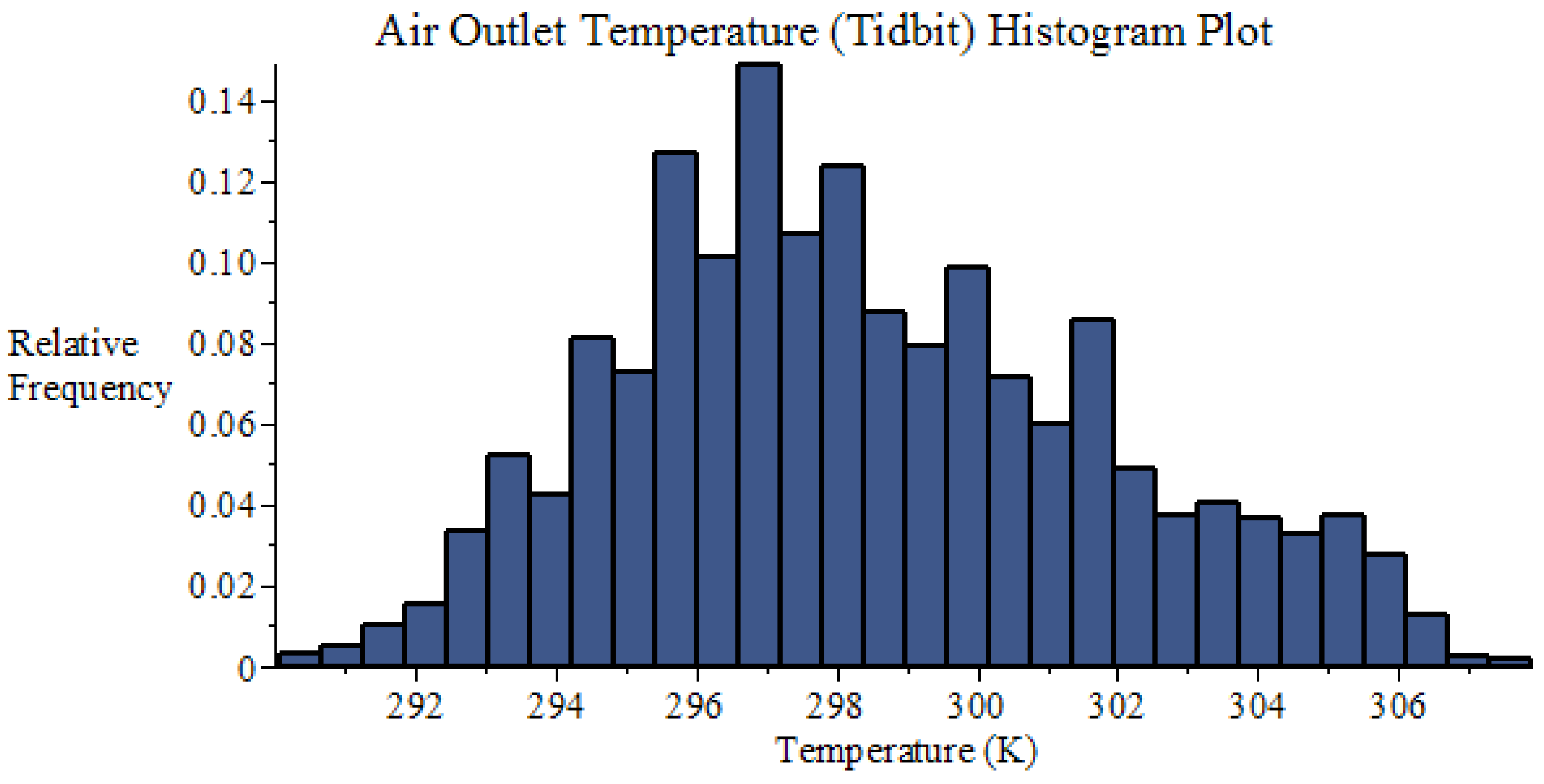
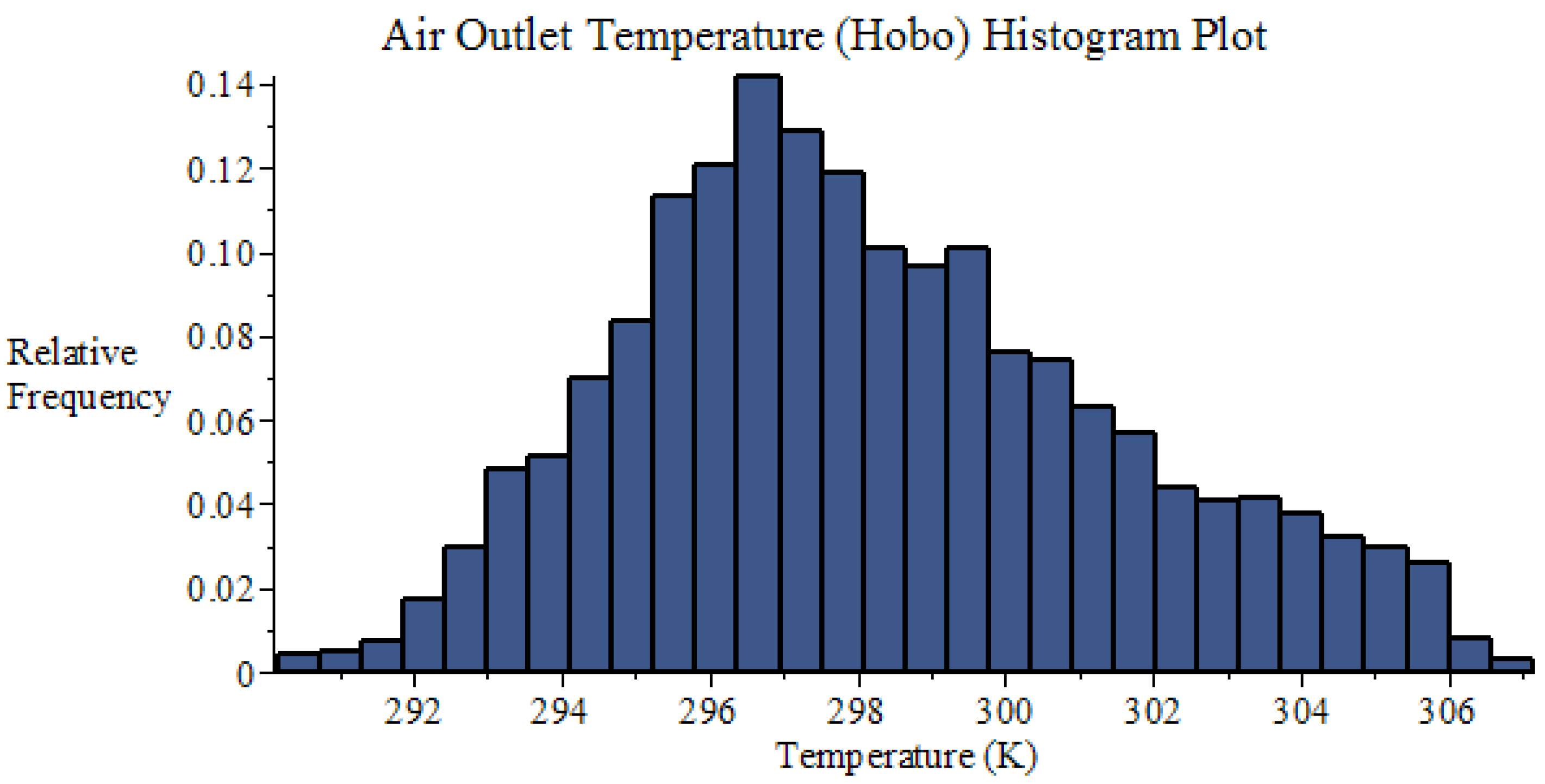
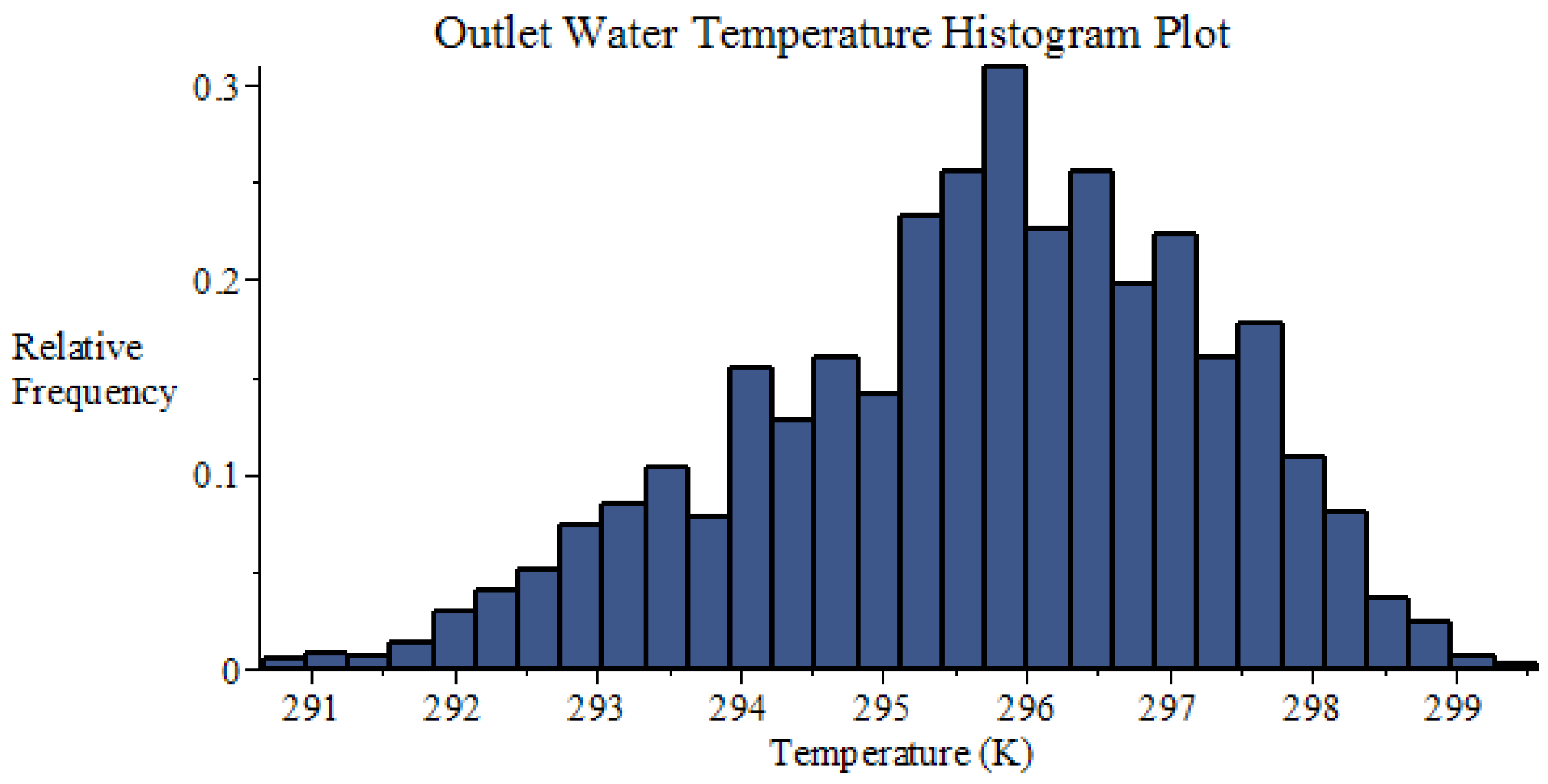
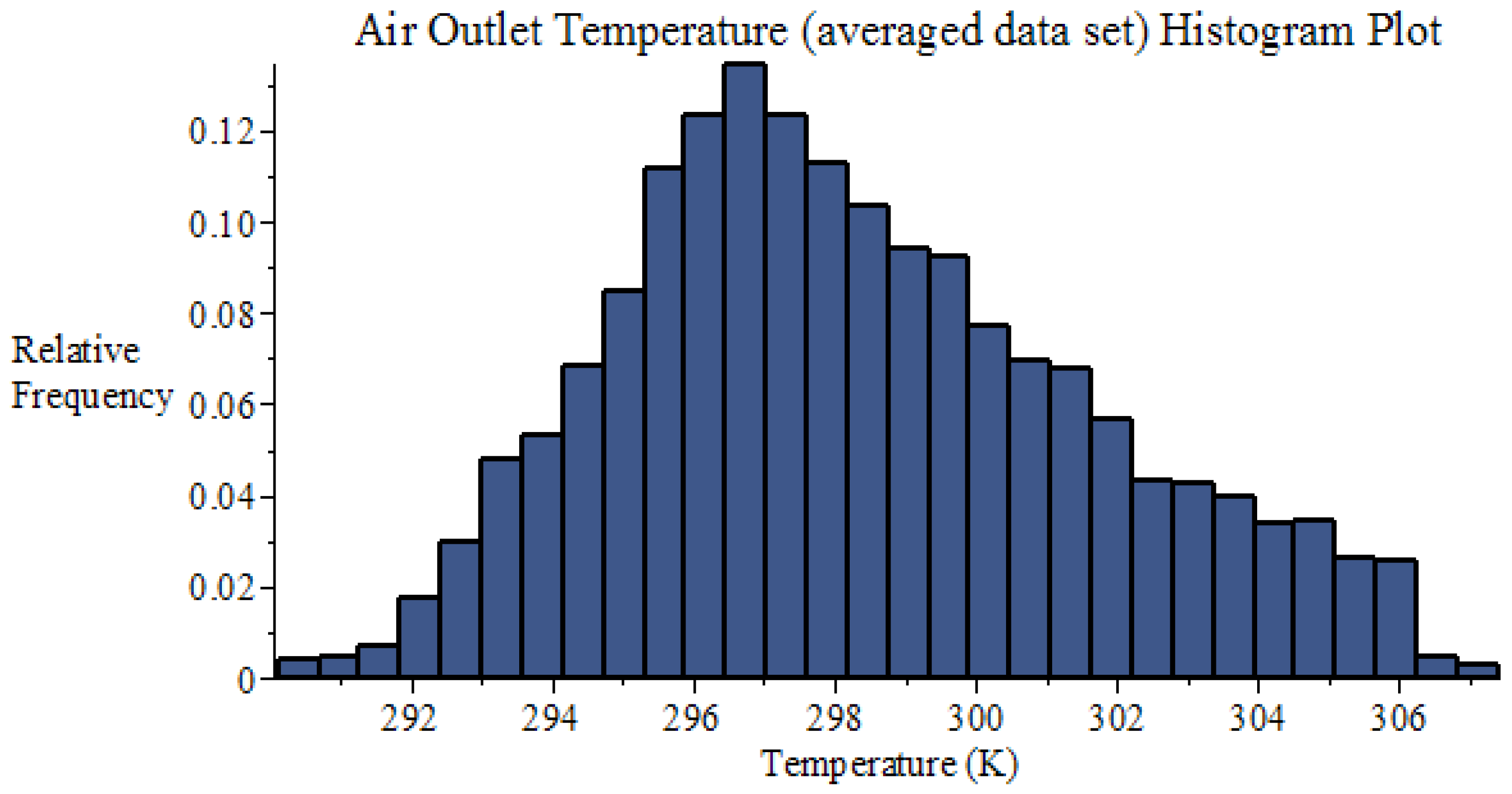
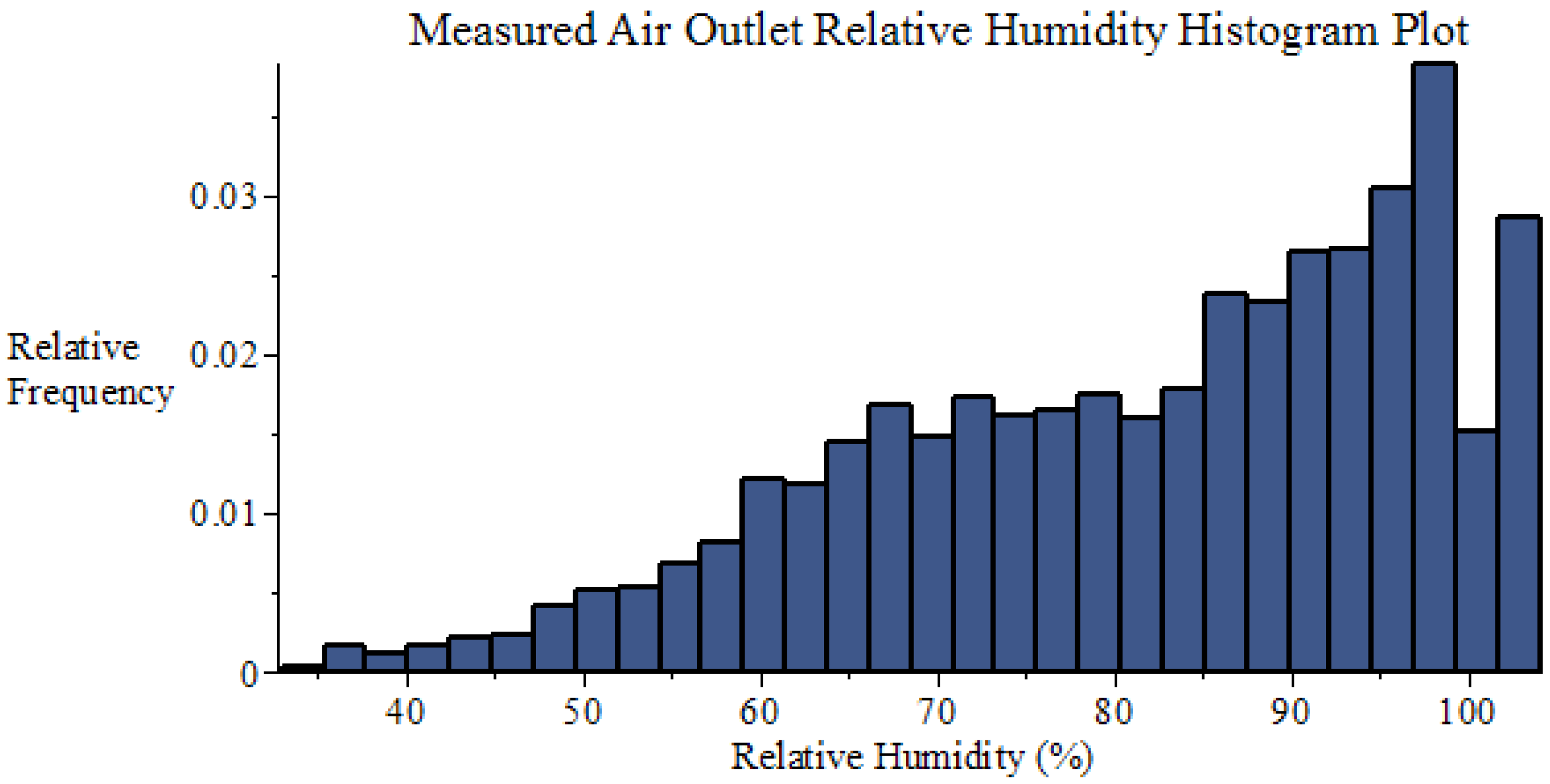
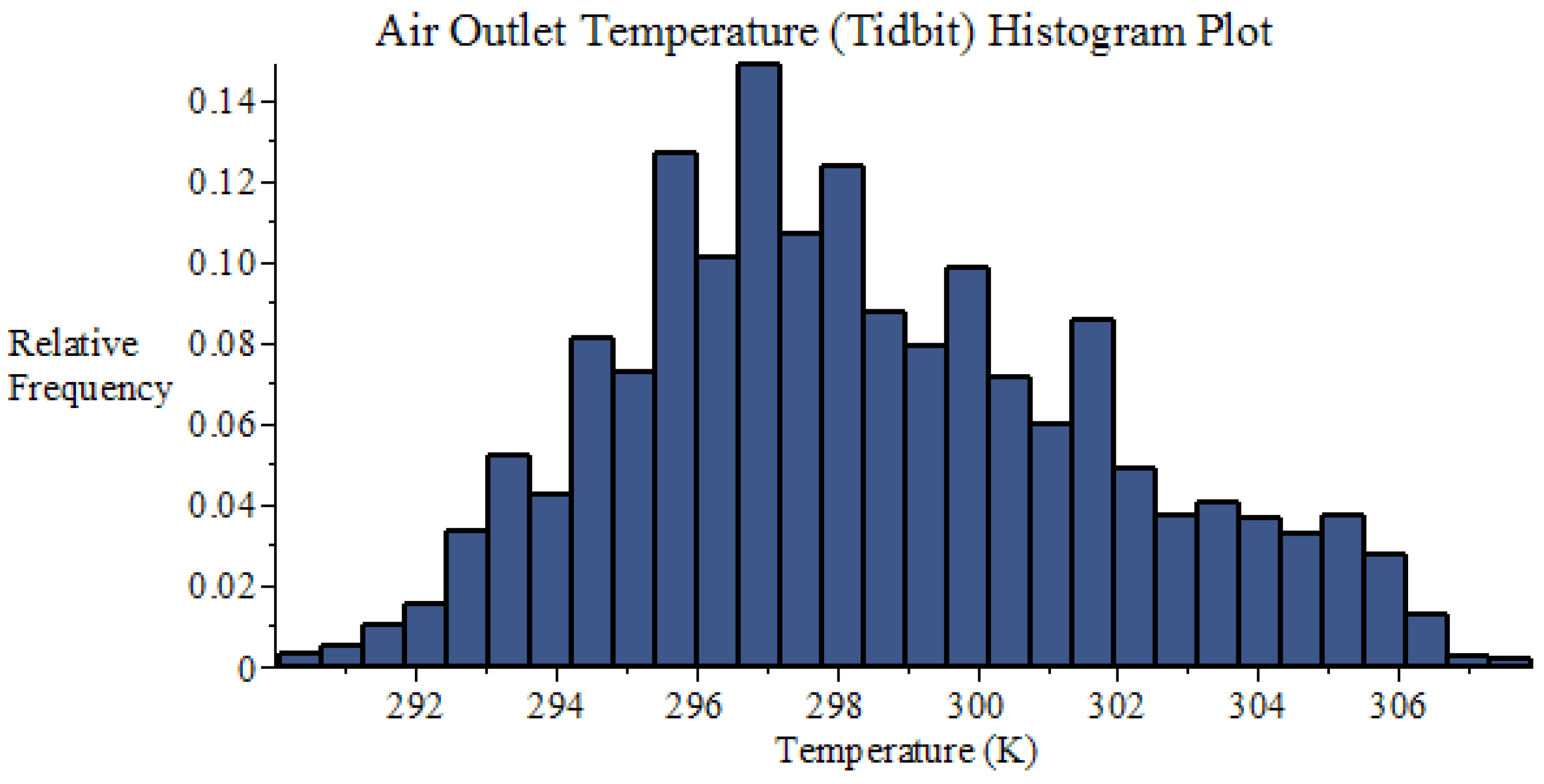
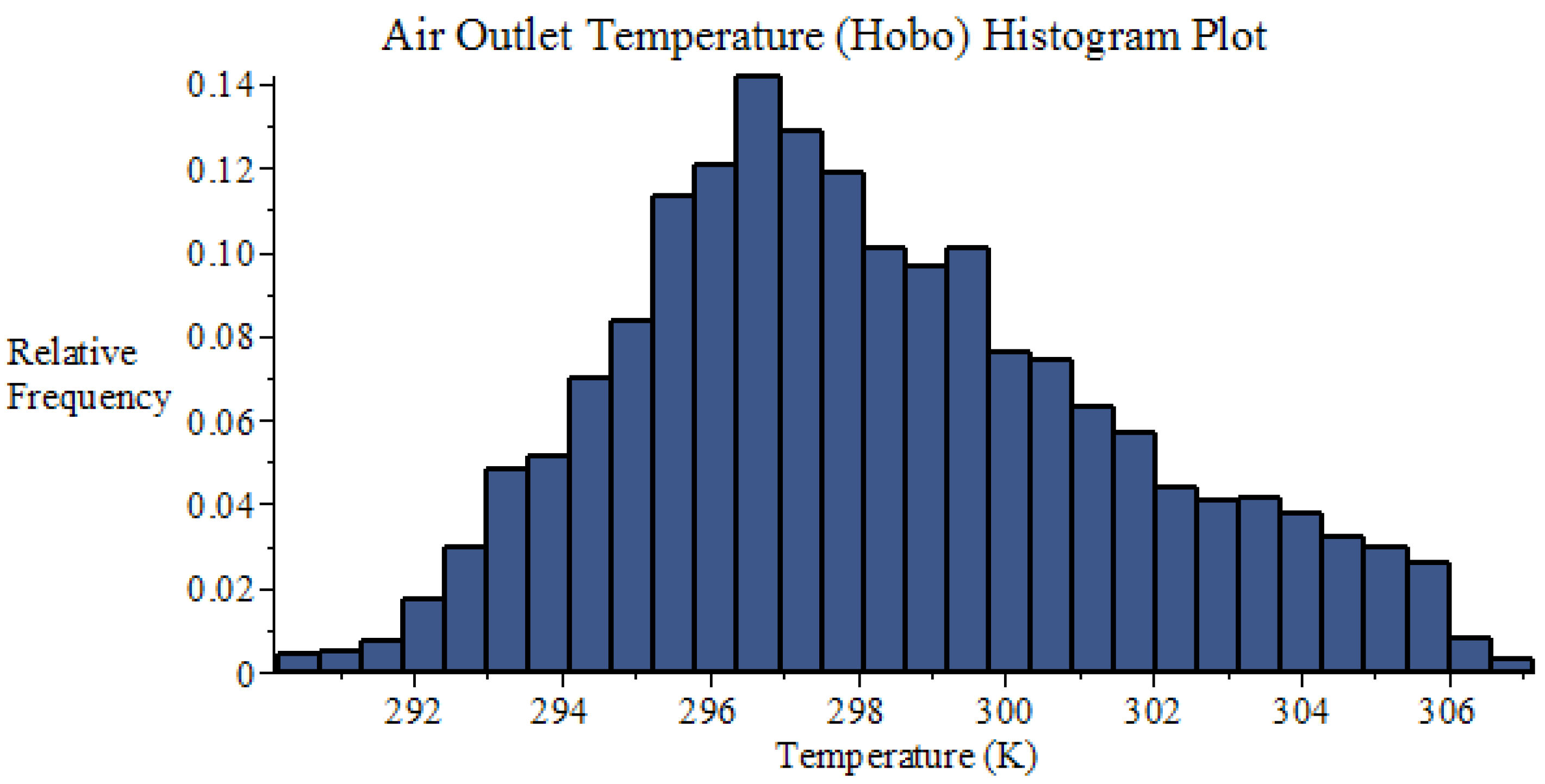
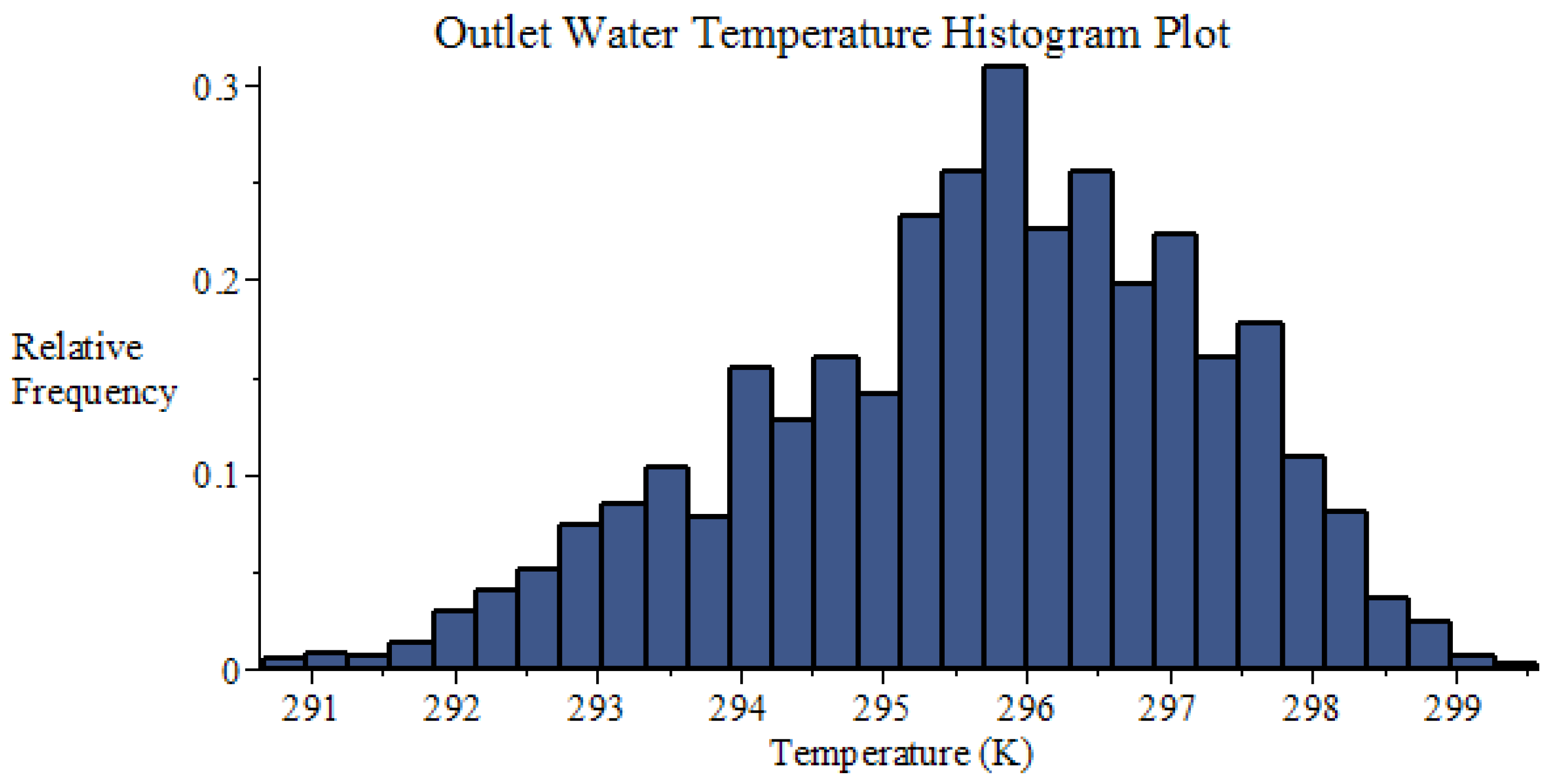
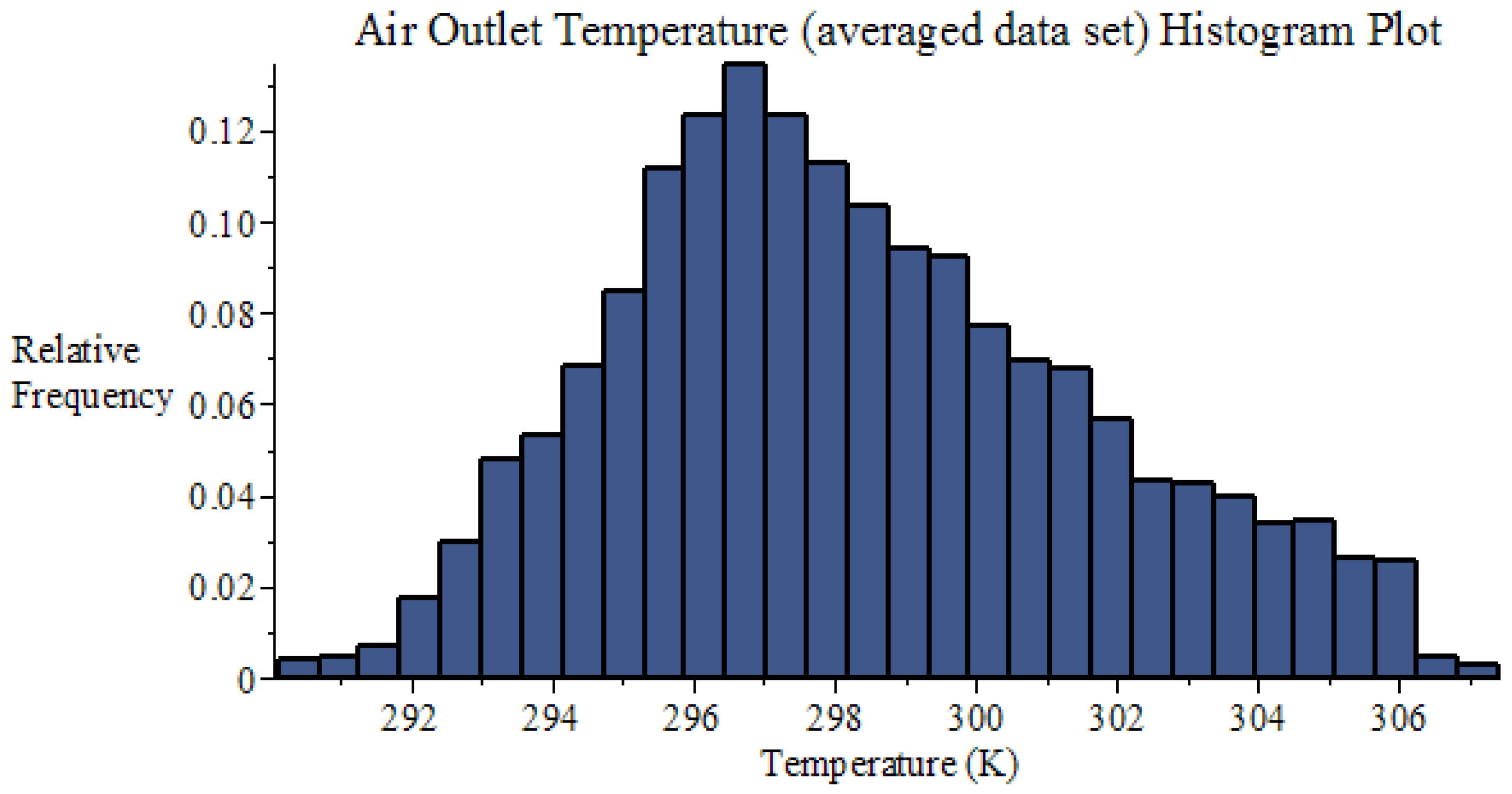
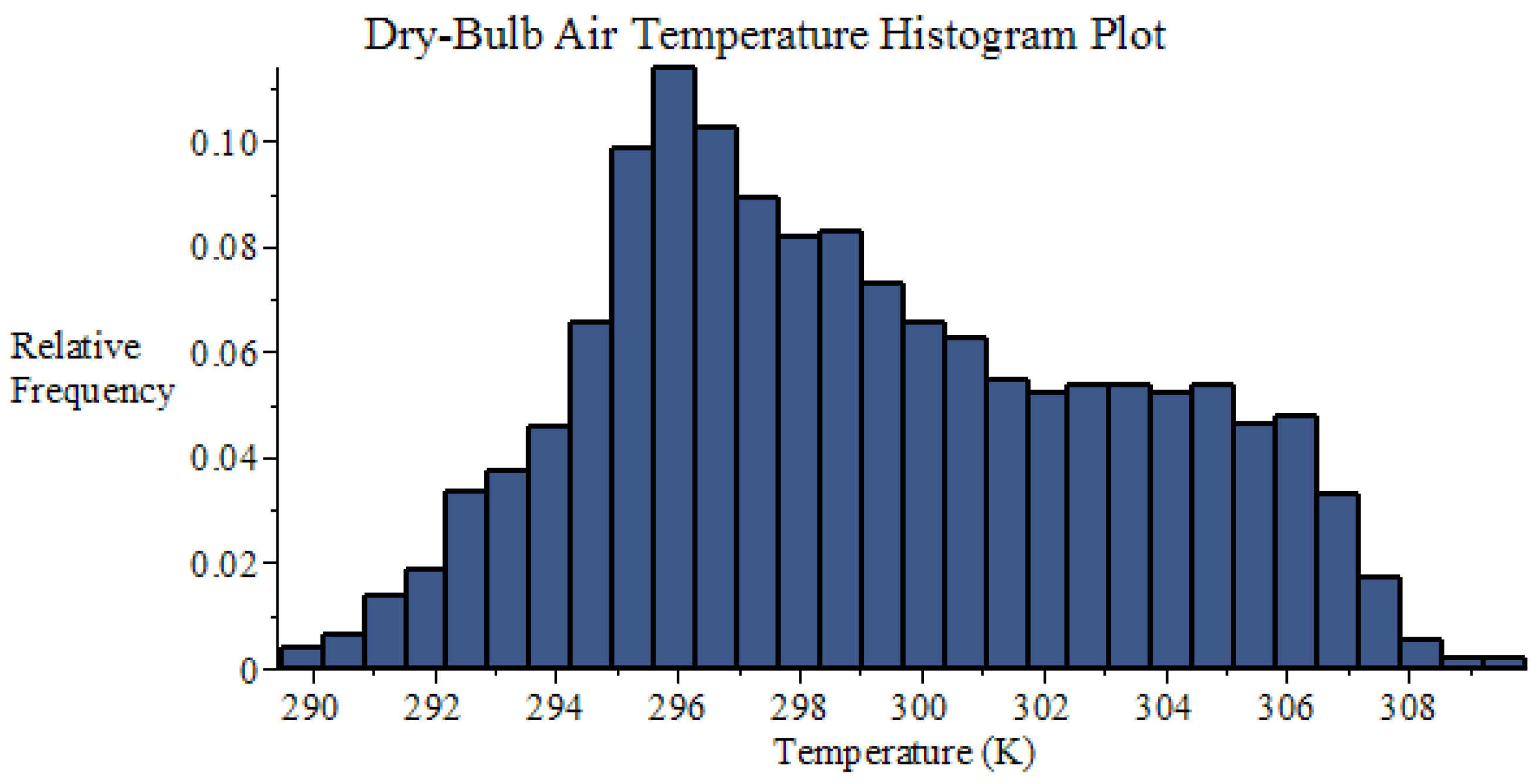
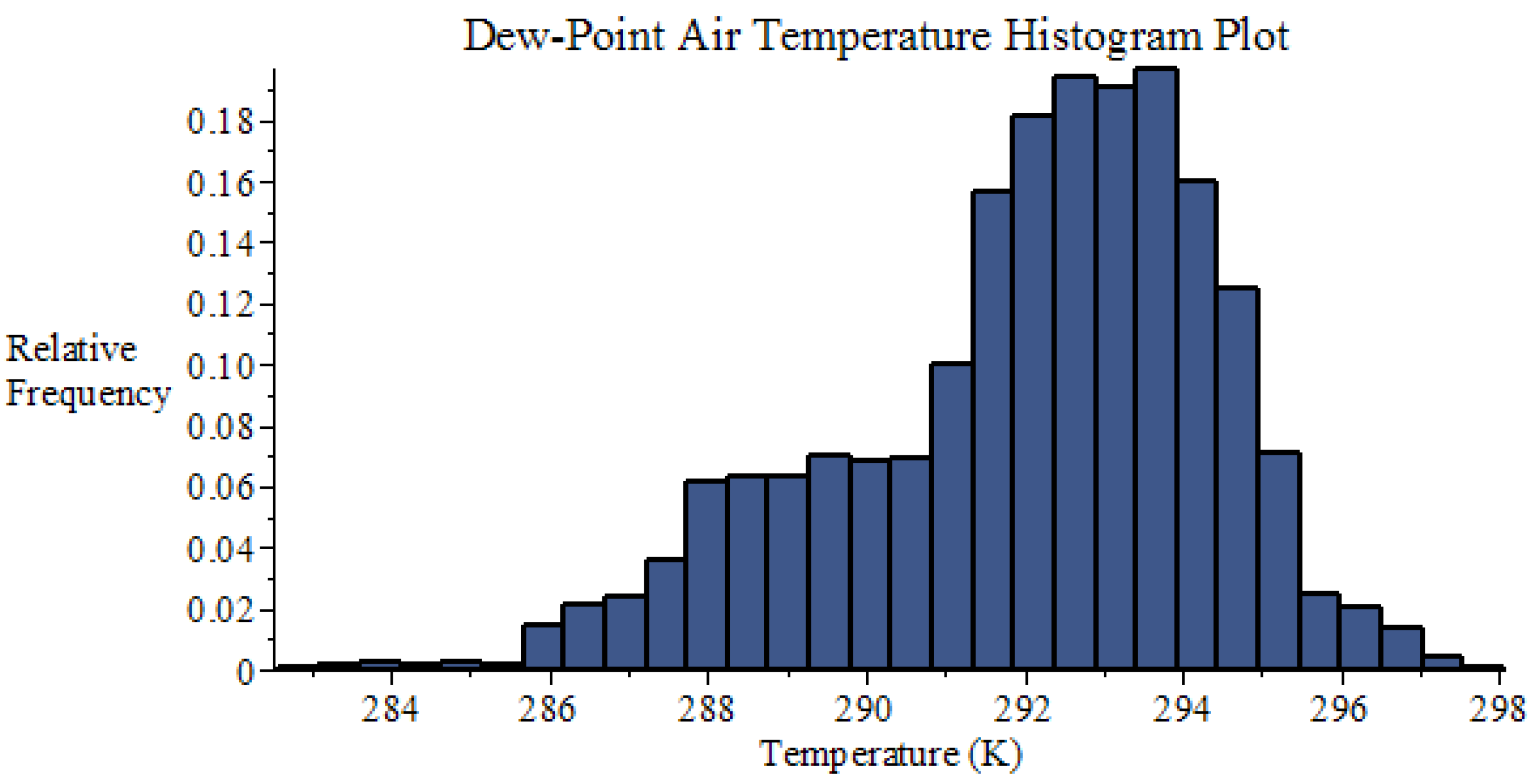
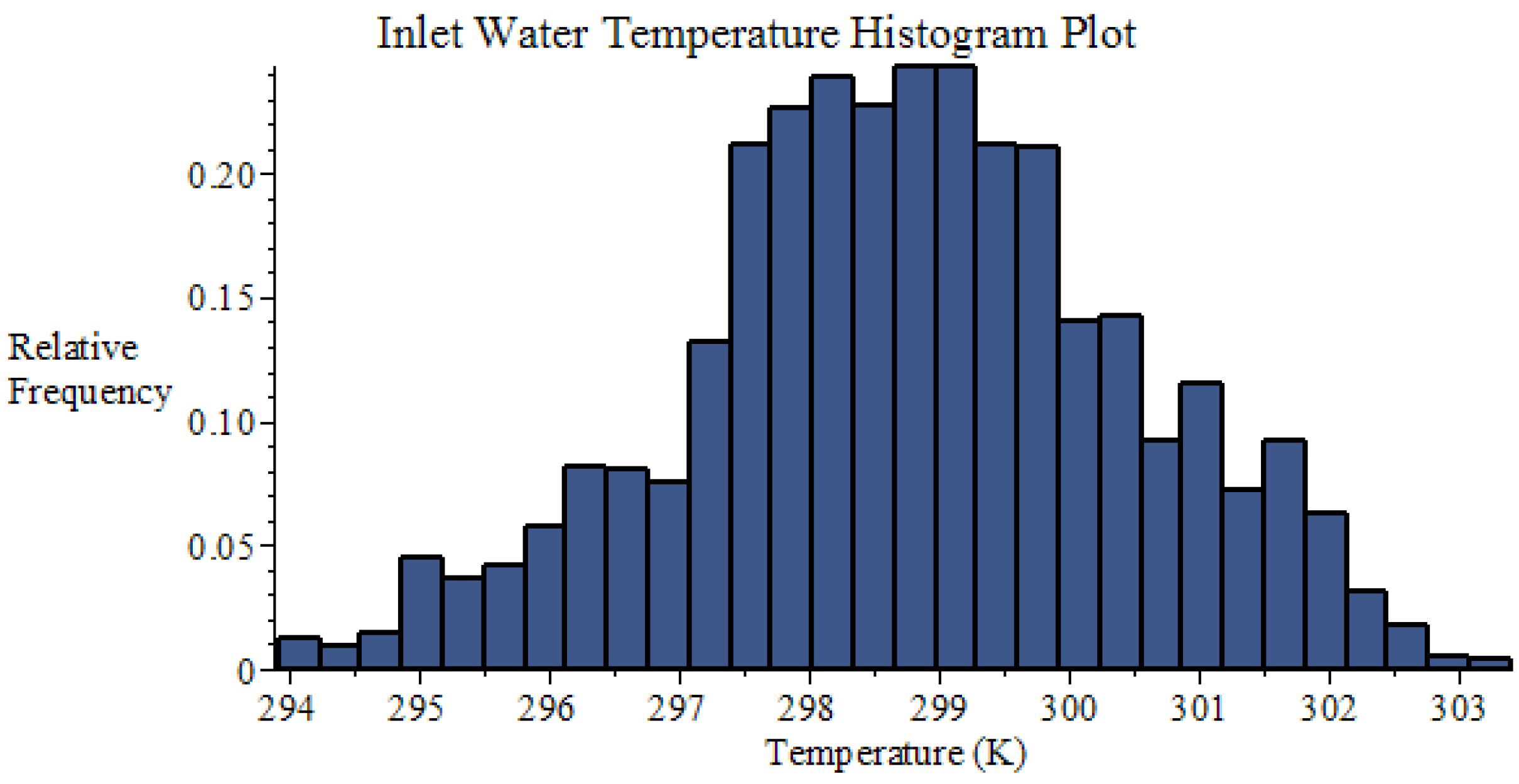
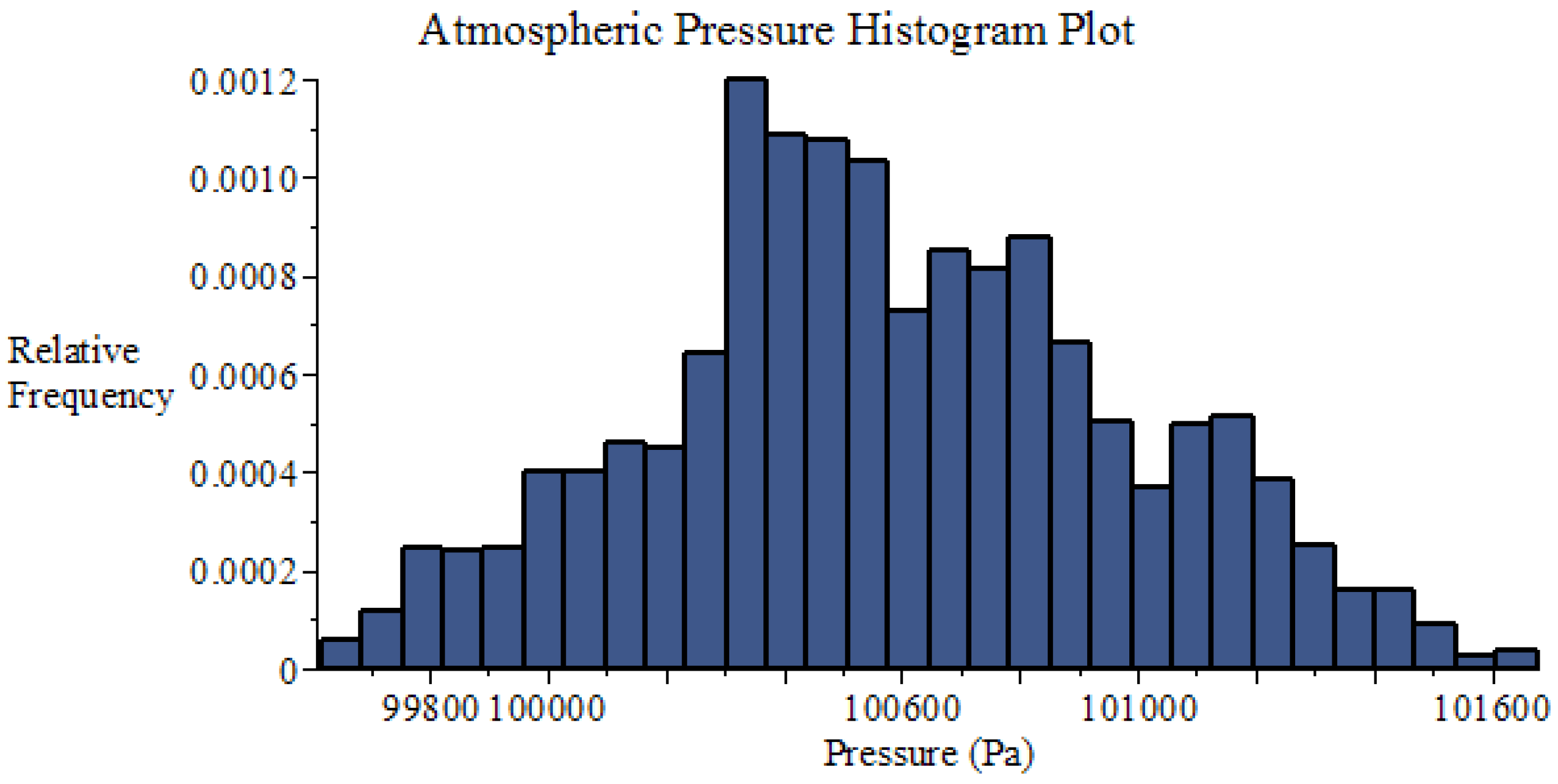
During the period from April, 2004 through August, 2004, a total 8079 measured benchmark data sets for F-area cooling towers (fan-on case) were recorded every fifteen minutes at SRNL for F-Area Cooling Towers [
7]. Each of these data sets contained measurements of the following (four) quantities: (i) outlet air temperature measured with the sensor called “Tidbit”, which will be denoted as
Ta,out(Tidbit); (ii) outlet air temperature measured with the sensor called “Hobo”, which will be denoted as
Ta,out(Hobo); (iii) outlet water temperature, which will be denoted as
; (iv) outlet air relative humidity, which will be denoted as
RHmeas. Histogram plots of these 7668 measurement sets (each set containing measurements of
Ta,out(Tidbit),
Ta,out(Hobo),
and
RHmeas), together with statistical analyses of these measurements, are presented in
Appendix A. These measured quantities provide the basis for the choosing the state functions underlying the mathematical modeling of the cooling tower, which is presented in
Section 2.1. An accurate and efficient numerical method for solving the equations underlying the counter-flow cooling tower is also presented in this section.
Section 2.2 presents the development of the cooling tower adjoint sensitivity model, along with the solution method for computing the adjoint state functions. The numerical accuracy of solving the equations underlying the adjoint sensitivity model will also be verified.
2.1. Mathematical Model of the Counter-Flow Cooling Tower
The counter-flow cooling tower considered in this work has been originally developed in [
1] and is schematically presented in
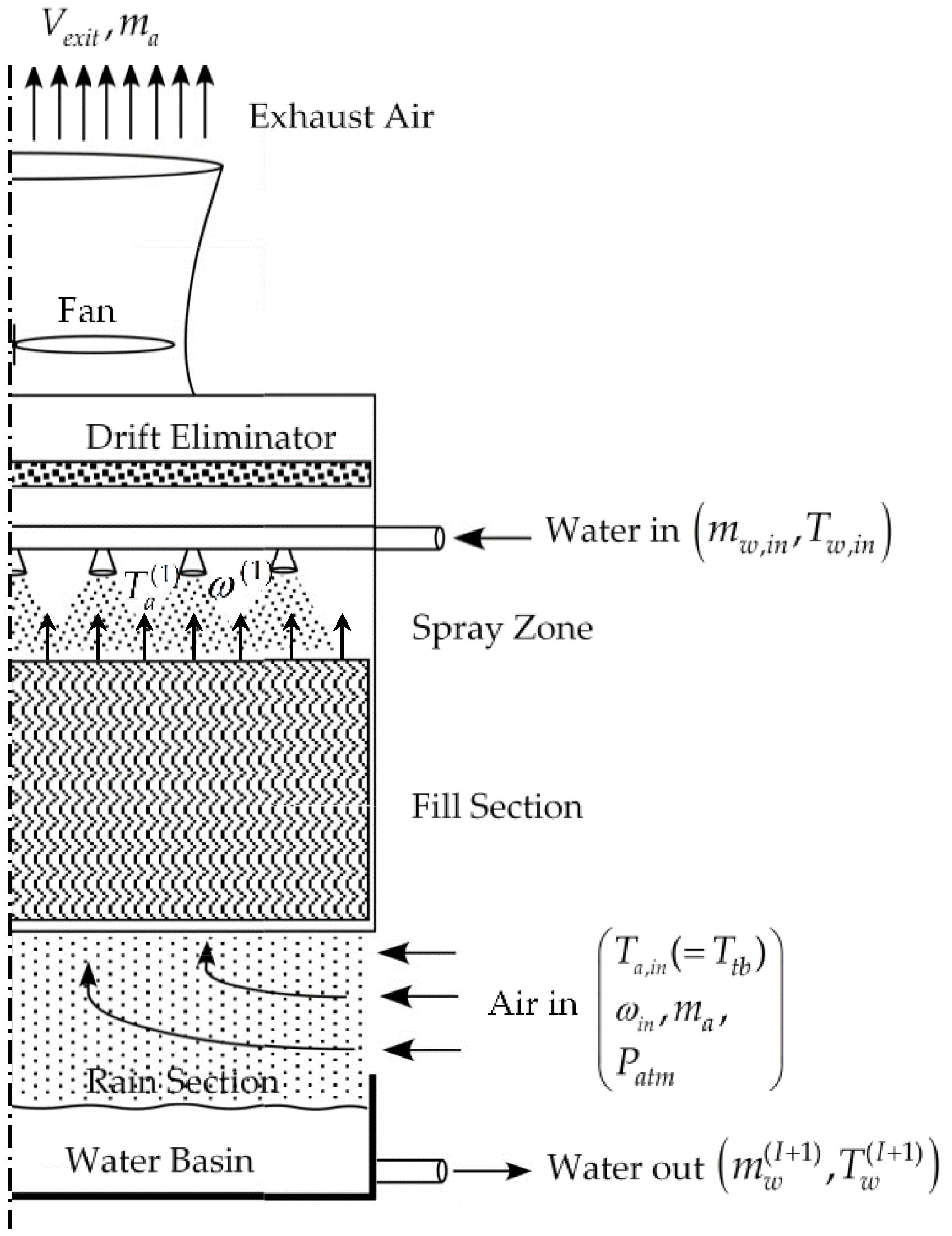
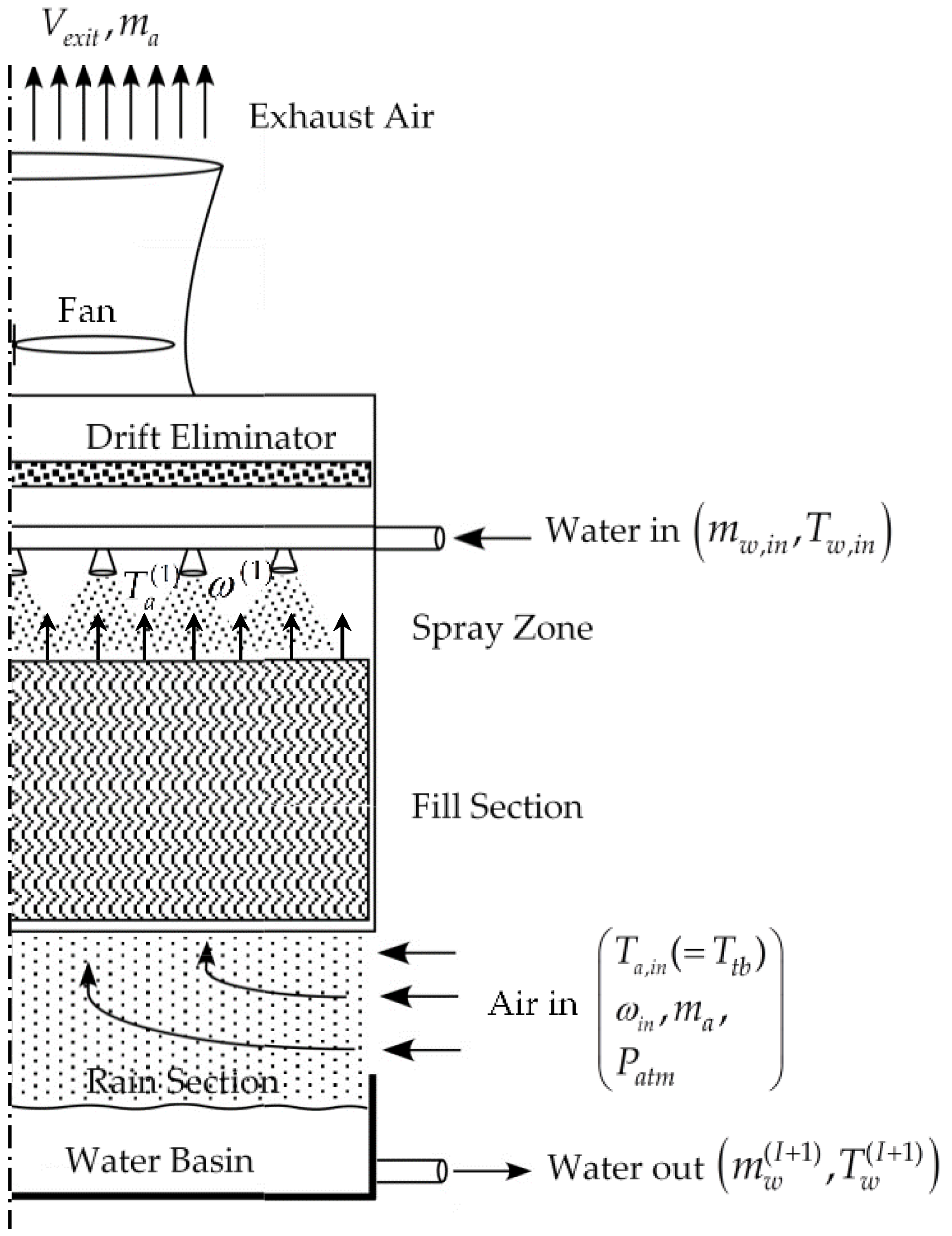
Figure 1.
As this figure indicates, forced air flow enters the tower through the “rain section” above the water basin, flows upward through the fill section and the drift eliminator, and exits at the tower’s top through an exhaust that encloses a fan. Hot water enters above the fill section and is sprayed onto the top of the fill section to create a uniform, downward falling, film flow through the fill’s numerous meandering vertical passages. Film fills are designed to maximize the water free surface area and the residence time inside of the fill section. Heat and mass transfer occurs at the falling film’s free surface between the water film and the upward air flow. The drift eliminator above the spray zone removes entrained water droplets from the upward flowing air. Below the fill section, the water droplets fall into a collection basin, placed at the bottom of the cooling tower. The heat and mass transfer processes occur overwhelmingly in the fill section. Modeling the heat and mass transfer processes between falling water film and rising air in the cooling tower’s fill section is accomplished by solving the following balance equations: (A) liquid continuity; (B) liquid energy balance; (C) water vapor continuity; (D) air/water vapor energy balance. The assumptions used in deriving these equations are as follows:
the air and/or water temperatures are uniform throughout each stream at any cross section;
the cooling tower has uniform cross-sectional area;
the heat and mass transfer occur solely in the direction normal to flows;
the heat and mass transfer through tower walls to the environment is negligible;
the heat transfer from the cooling tower fan and motor assembly to the air is negligible;
the air and water vapor mix as ideal gasses;
the flow between flat plates is unsaturated through the fill section.
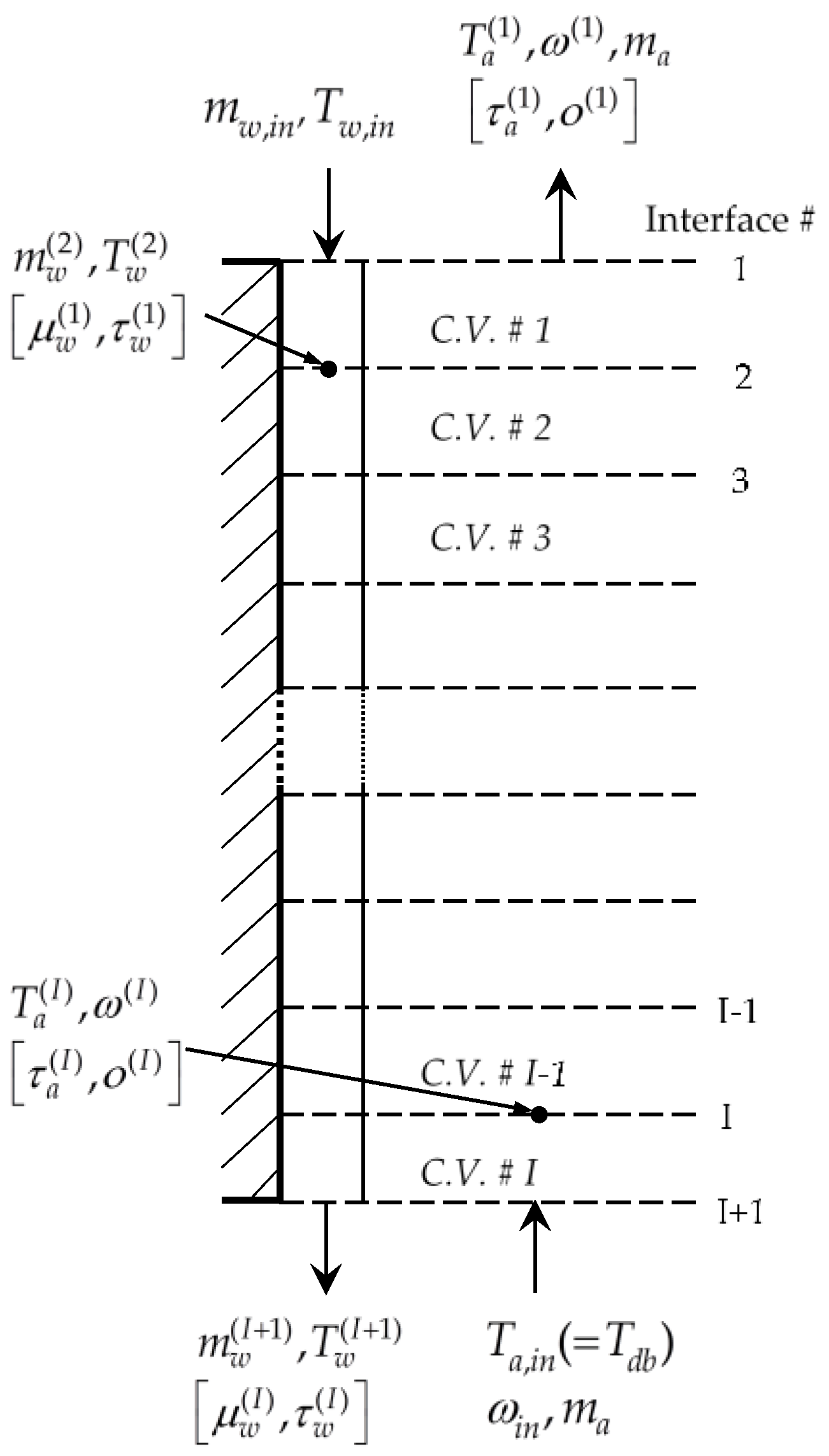
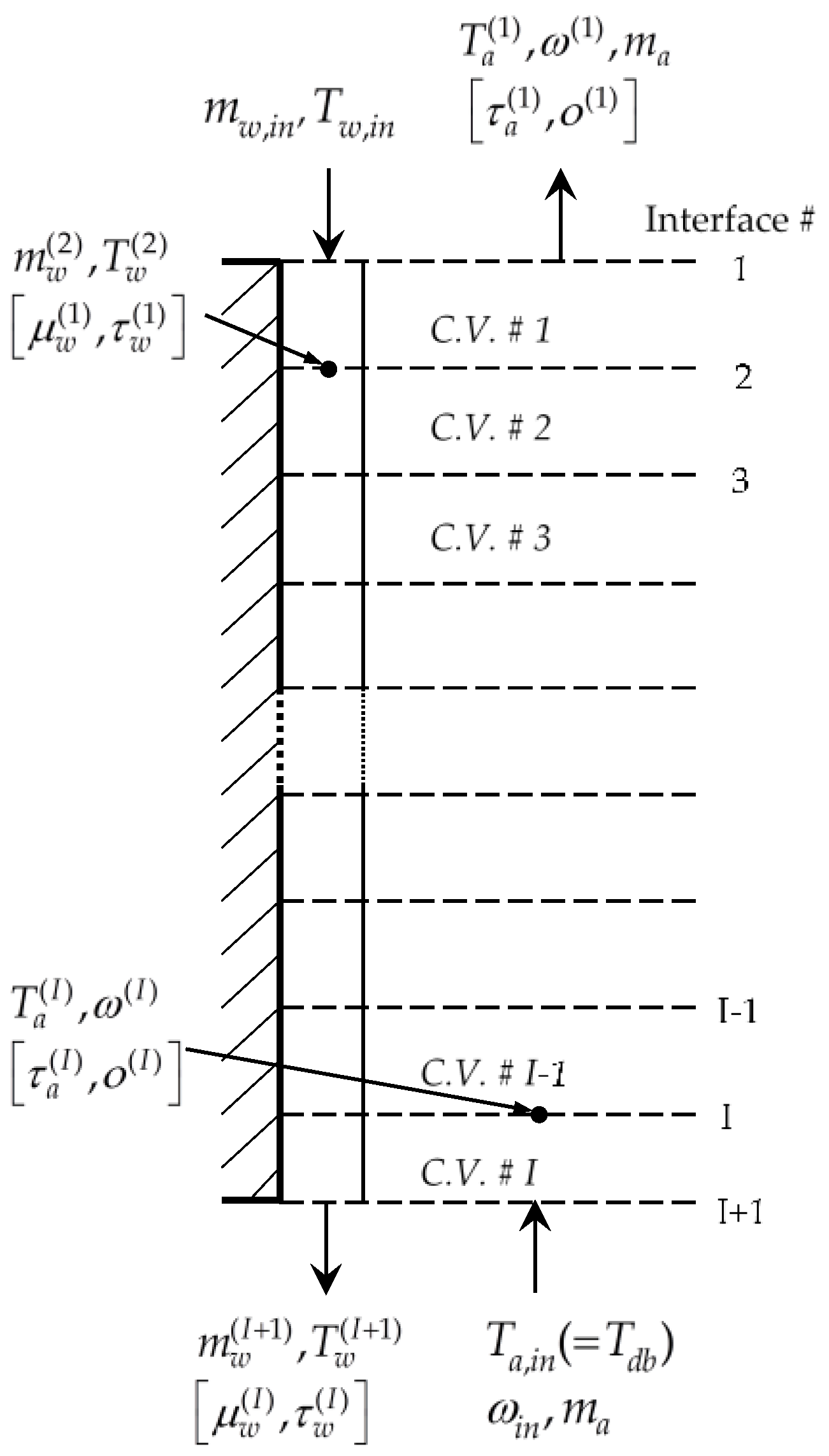
This work considers moderately sized towers for which the heat and mass transfer processes in the rain section is negligible. The fill section is modeled by discretizing it in vertically stacked control volumes as depicted in
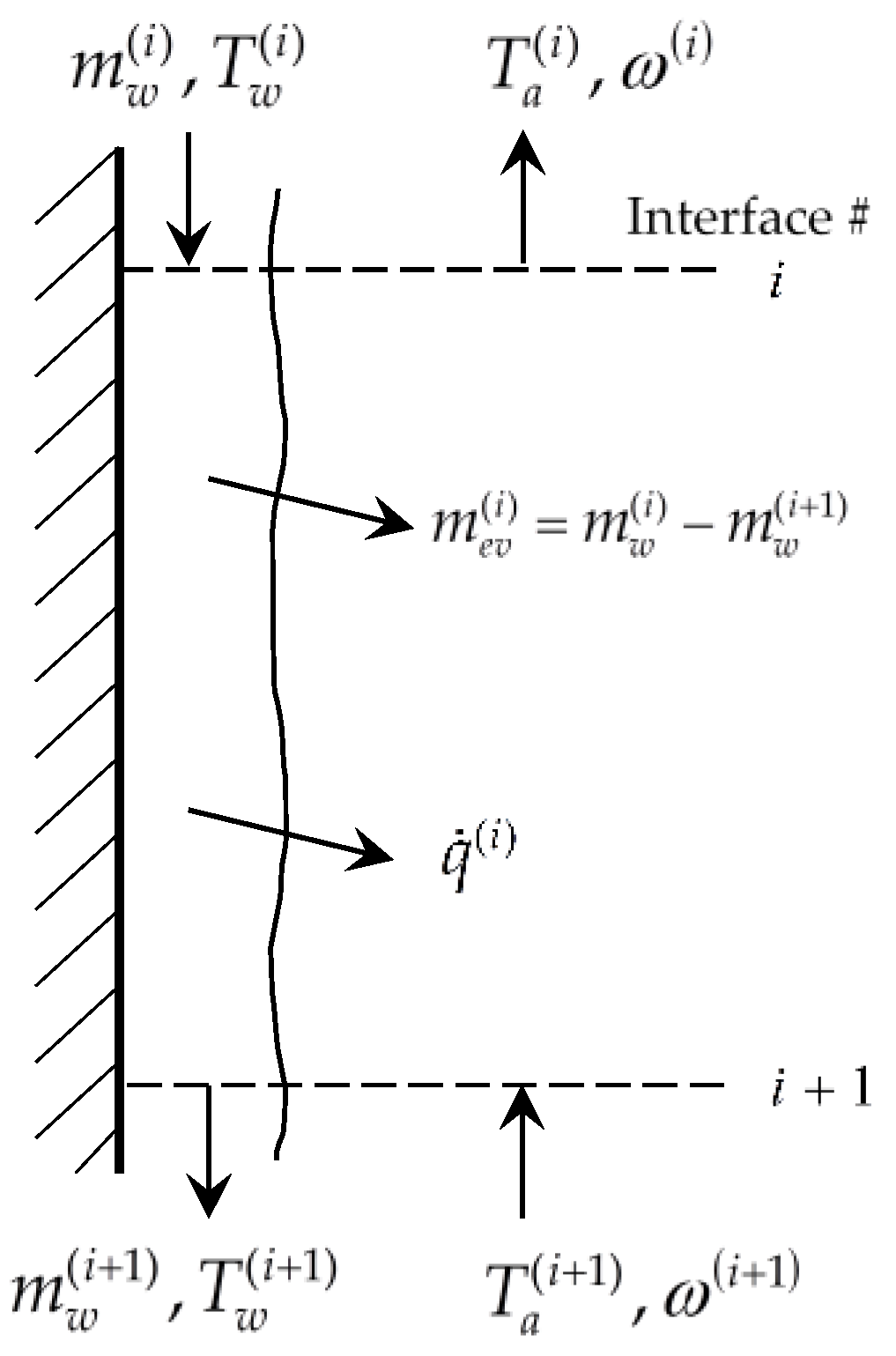
Figure 2. The heat and mass transfer between the falling water film and the rising air in a typical control volume of the cooling tower’s fill section is presented in
Figure 3.
In the mechanical draft mode, the mass flow rate of dry air is specified. With the fan off and hot water flowing through the cooling tower, air will continue to flow through the tower due to buoyancy. Wind pressure at the air inlet to the cooling tower will also enhance air flow through the tower. The air flow rate is determined from the overall mechanical energy equation for the dry air flow. The state functions underlying the cooling tower model (cf.,
Figure 1,
Figure 2 and
Figure 3) are as follows:
the water mass flow rates, denoted as , at the exit of each control volume, i, along the height of the fill section of the cooling tower;
the water temperatures, denoted as , at the exit of each control volume, i, along the height of the fill section of the cooling tower;
the air temperatures, denoted as , at the exit of each control volume, i, along the height of the fill section of the cooling tower; and
the humidity ratios, denoted as ., at the exit of each control volume, i, along the height of the fill section of the cooling tower.
It is convenient to consider the above state functions to be components of the following (column) vectors:
In this work, the dagger
will be used to denote “transposition”, and all vectors will be considered to be column vectors. The governing conservation equations within the total of
I = 49 control volumes represented in
Figure 2 are as follows [
1]:
Liquid continuity equations:
- (i)
- (ii)
Control Volumes i = 2,..., I−1: - (iii)
Liquid energy balance equations:
- (i)
- (ii)
Control Volumes i = 2,…, I−1: - (iii)
Water vapor continuity equations:
- (i)
- (ii)
Control Volumes i = 2,..., I−1: - (iii)
The air/water vapor energy balance equations:
- (i)
- (ii)
Control Volumes i = 2,..., I−1: - (iii)
The components of the vector
, which appears in Equations (2)–(13), comprise the model parameters which are generically denoted as
, i.e.:
where
denotes the total number of model parameters. These model parameters are experimentally derived quantities, and their complete distributions parameters are not known; however, we have determined the first four moments (means, variance/covariance, skewness, and kurtosis) of each of these parameter distributions, as detailed in
Appendix B.
In the original work [
1], the above equations were solved using a two stage-iterative method comprising an “inner-iteration” using Newton’s method within each control volume, followed by an outer iteration aimed at achieving overall convergence. This procedure, though, did not converge at all of the points of interest. Therefore, after testing several alternatives provided in [
8] and [
9], we have replaced the original solution method in [
1] by Newton’s method together with the GMRES linear iterative solver for sparse matrices [
10] provided in the NSPCG package [
9], which turned out to be the most efficient among those we have tested. This GMRES method [
10] approximates the exact solution-vector of a linear system by using the Arnoldi iteration to find the approximate solution-vector by minimizing the norm of the residual vector over a Krylov subspace. The specific computational steps are as follows:
- (a)
Write Equations (1)–(13) in vector form as:
where the following definitions were used:
- (b)
Set the initial guess, , to be the inlet boundary conditions;
- (c)
Steps d through g, below, constitute the outer iteration loop; for , iterate over the following steps until convergence:
- (d)
Inner iteration loop: for
use the iterative GMRES linear solver with the Modified Incomplete Cholesky (MIC) preconditioner, with restarts, to solve, until convergence, the following system to compute the vector
:
where
is the current outer loop iteration number, and the Jacobian matrix of derivatives of Equations (2)–(13) with respect to the state functions is the block-matrix:
with matrix-components defined in
Appendix C. As shown in this Appendix, the Jacobian represented by Equation (18) is a non-symmetric sparse matrix of order 196 by 196, with 14 nonzero diagonals. The non-symmetric diagonal storage format is used to store the respective 14 nonzero diagonals, so that the “condensed” Jacobian matrix has dimensions 196 by 14. Since the Jacobian is highly non-symmetric, the cost of the iterations of the GMRES solver grows as
O(m2), where m is the iteration number within the GMRES solver. To reduce this computational cost, the GMRES solver is configured to run with the restart feature. The optimized value for the restart frequency is 10 for this specific application. The MIC preconditioner can speed up the convergence of the GMRES solver using the parameters OMEGA and LVFILL [
9] in the modified incomplete factorization methods for the MIC preconditioner; for this application the following values were found to be optimal: OMEGA = 0.000000001 and LVFILL = 1. The Jacobian is not updated inside the sparse GMRES solver. The default convergence of GMRES is tested with the following criterion [
9]:
where
denotes the pseudo-residual at
mth-iteration of the GMRES solver,
is the solution of Equation (17) at
mth-iteration, and
denotes the stopping test value for the GMRES solver.
- (e)
Set
where
is the current outer loop iteration number, and update the Jacobian.
- (f)
Test for convergence of the outer loop until the error in the solution is less than a specified maximum value. For solving Equations (2)–(13), the following error criterion has been used:
- (g)
Set and go to step d.
The above solution strategy for solving Equations (2)–(13) converged successfully for all the 8079 benchmark data sets. As described previously, each of these data sets contained measurements of the following quantities: (i) outlet air temperature measured with the sensor called “Tidbit”; (ii) outlet air temperature measured with the sensor called “Hobo”; (iii) outlet water temperature; (iv) outlet air relative humidity. For each of these benchmark data sets, the outer loop iterations described above (i.e., steps c through g) converge in 4 iterations; for each outer loop iteration, the GMRES solver used for solving Equation (17) converges in 12 iterations. The “zero-to-zero” verification of the solution’s accuracy using Equations (2) through (13) gives an error of the order of .
In view of the above-mentioned measurements, the responses of interest for this work are as follows:
- (a)
the vector of water mass flow rates at the exit of each control volume i, ;
- (b)
the vector of water temperatures at the exit of each control volume i, ;
- (c)
the vector of air temperatures at the exit of each control volume i, ;
- (d)
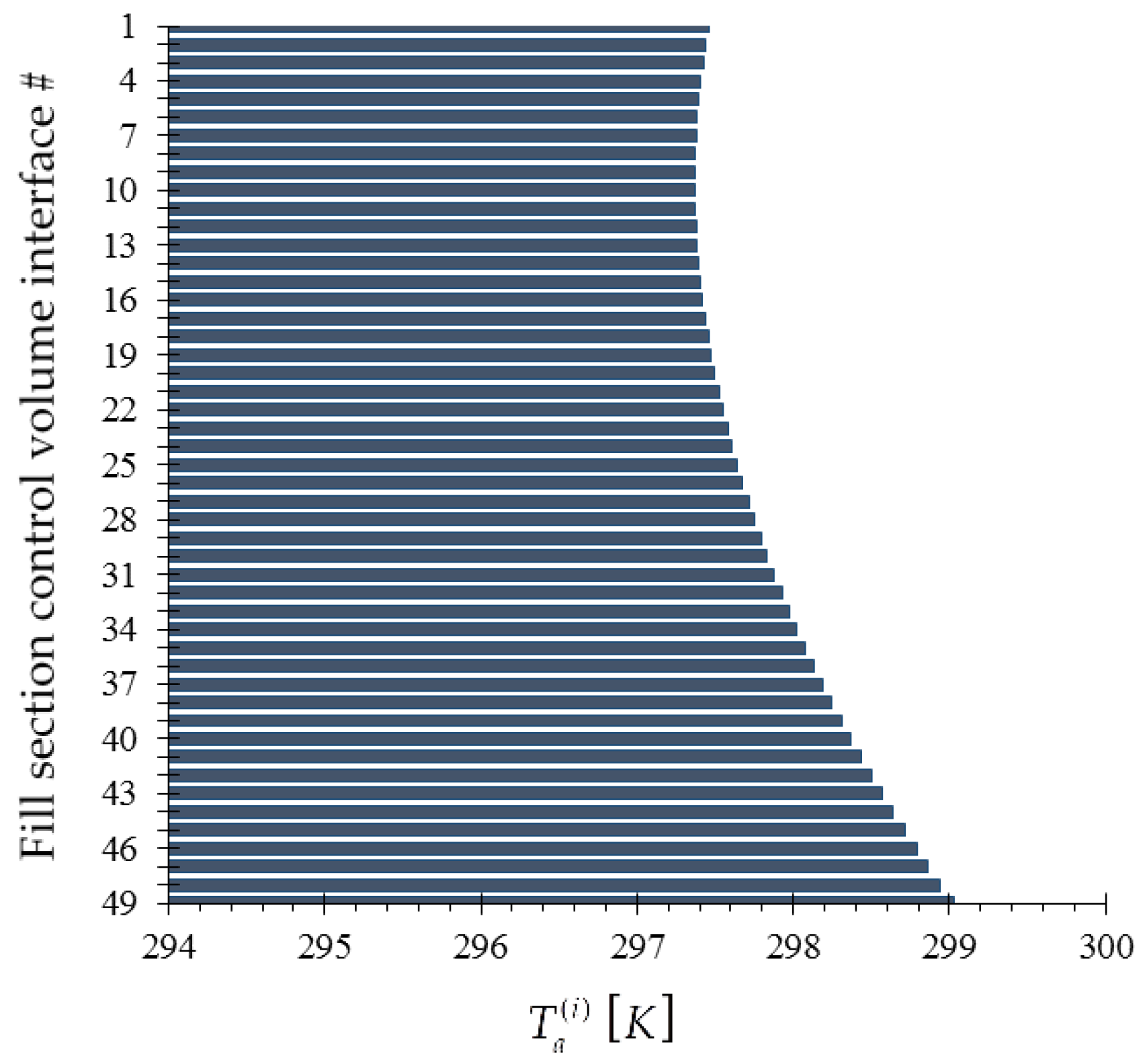
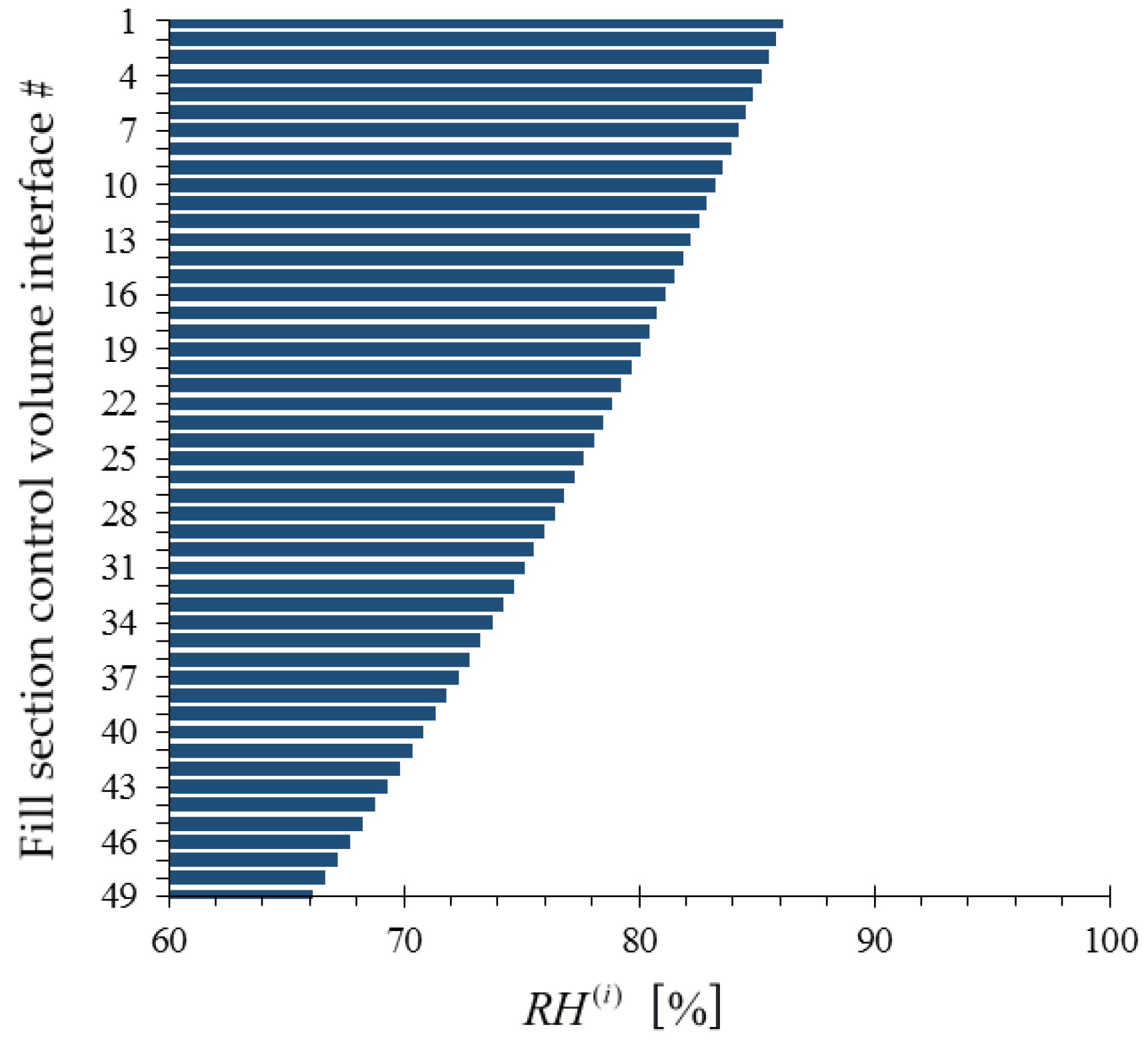
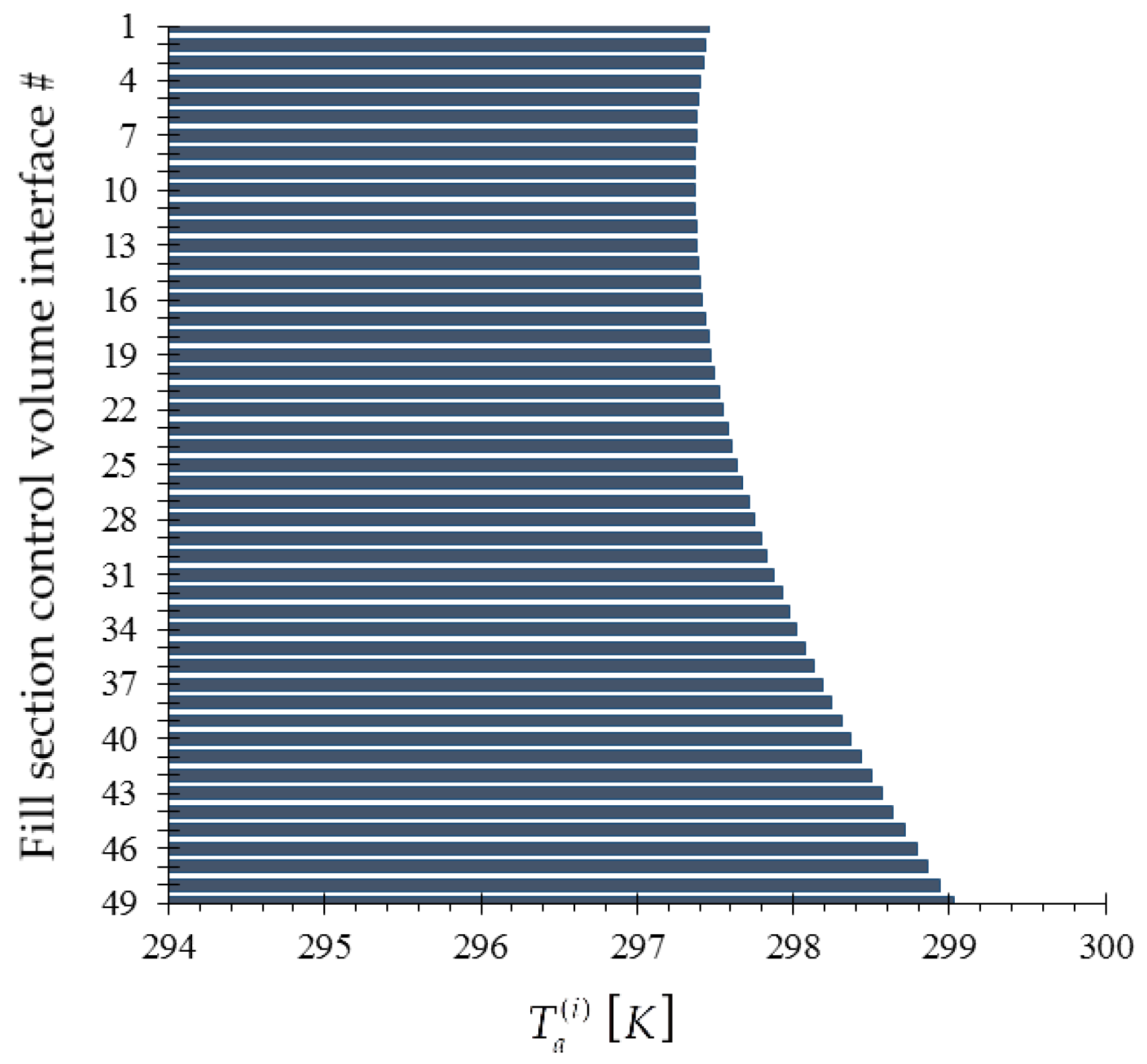
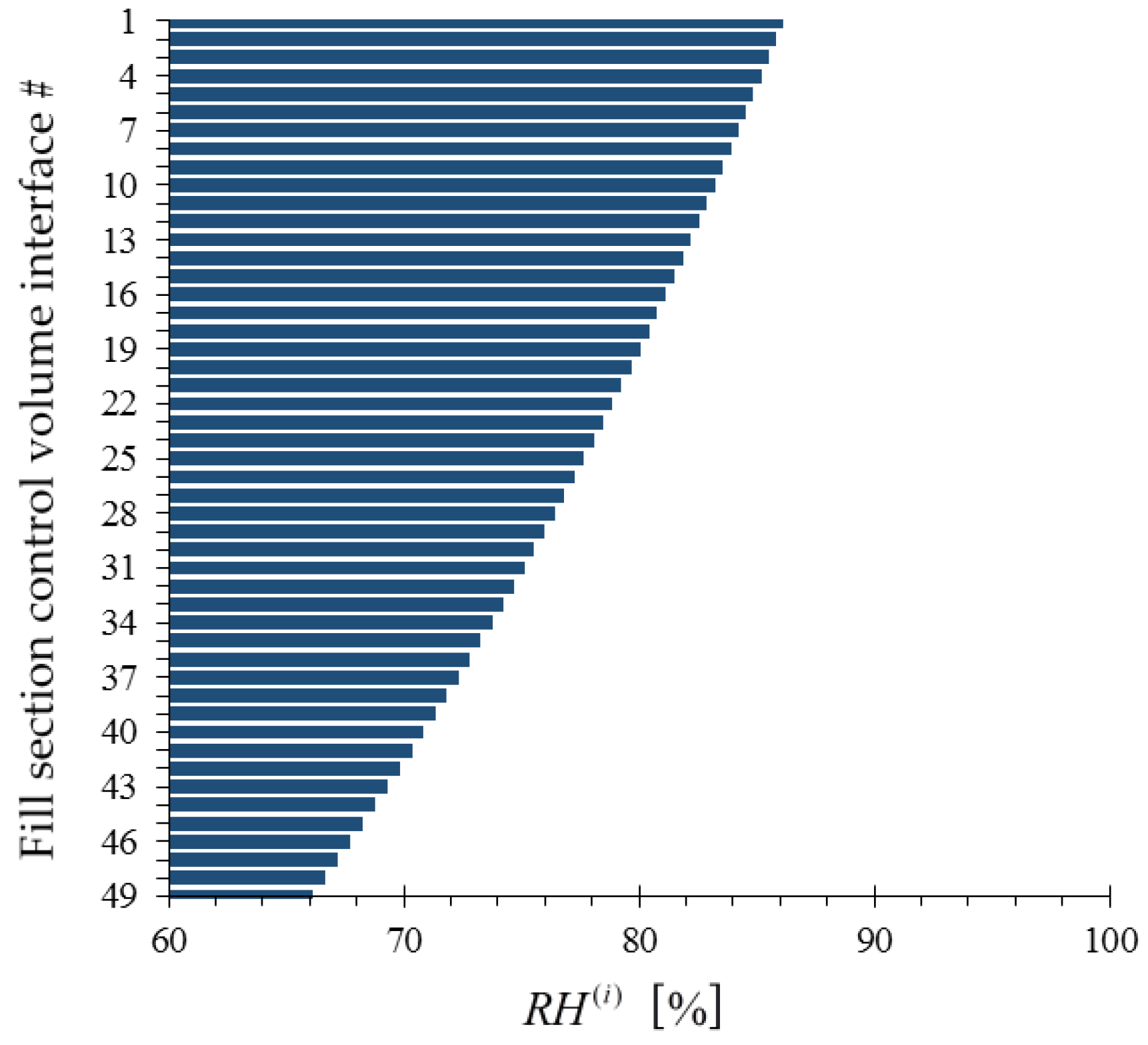
the vector , having components of the air relative humidity at the exit of each control volume i, .
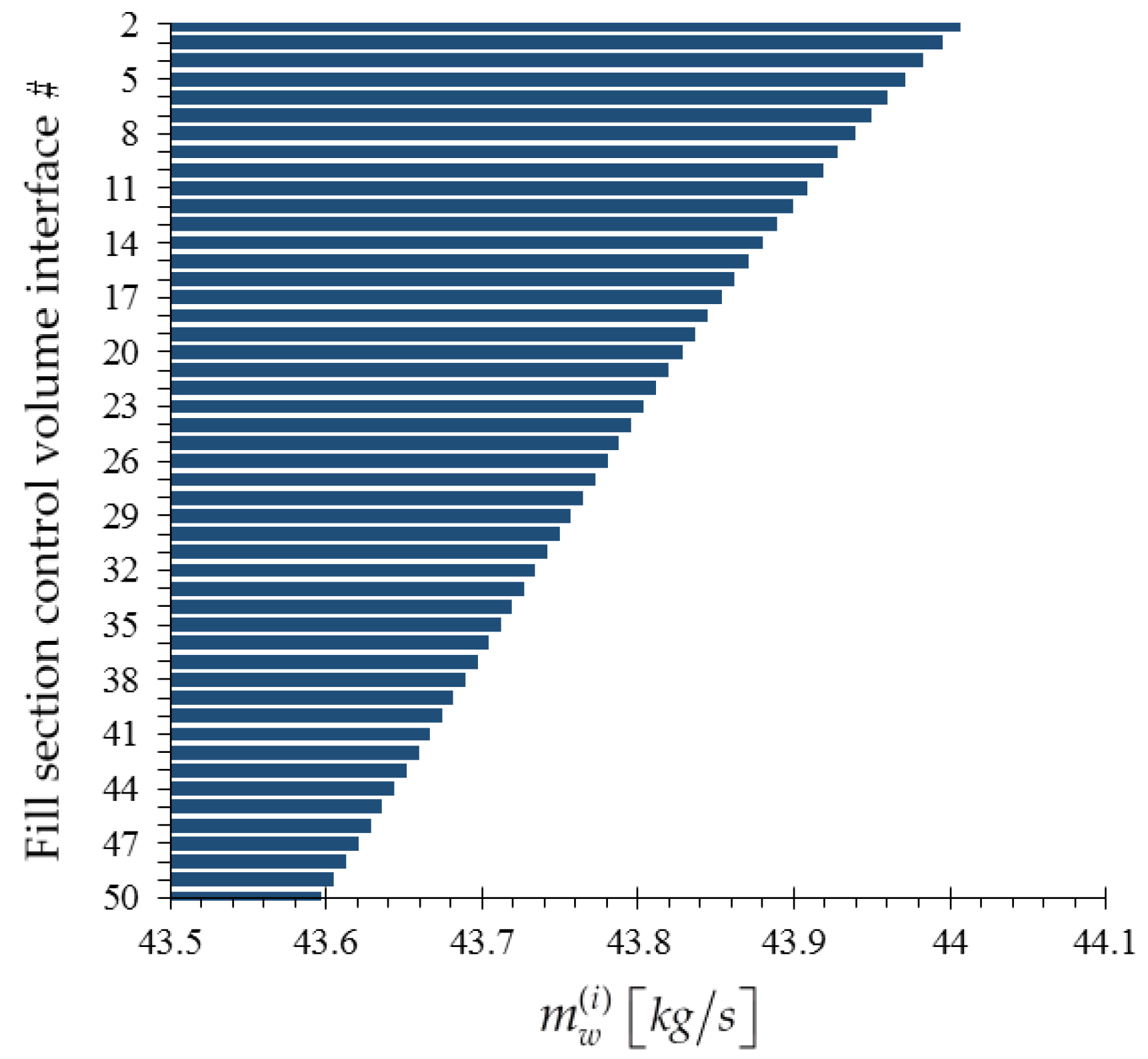
While the water mass flow rates
, the water temperatures
, and the air temperatures
are obtained directly as the solutions of Equations (2)–(13), the air relative humidity,
, is computed for each control volume using the expression:
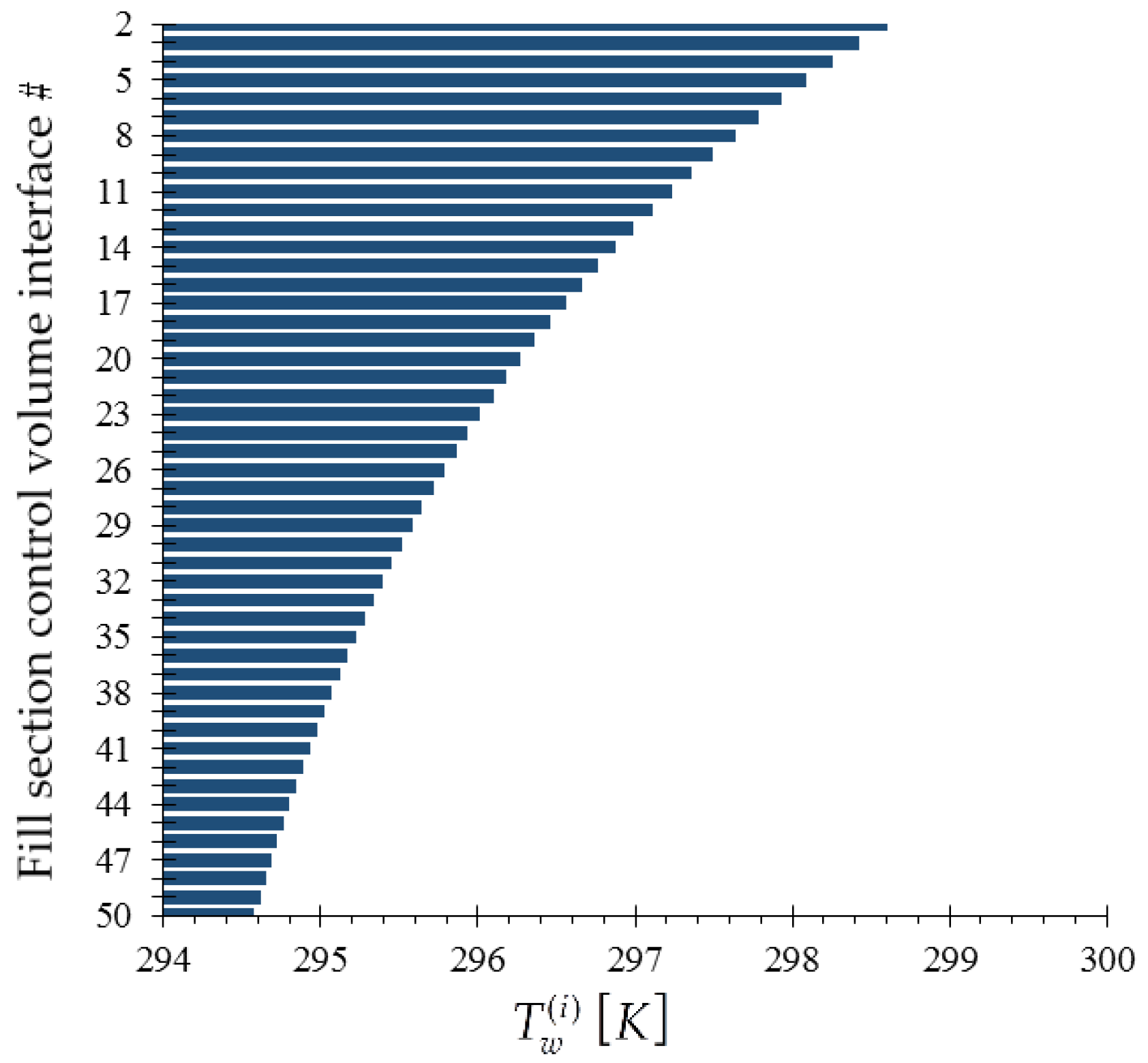
The bar plots, showing the respective values of the water mass flow rates
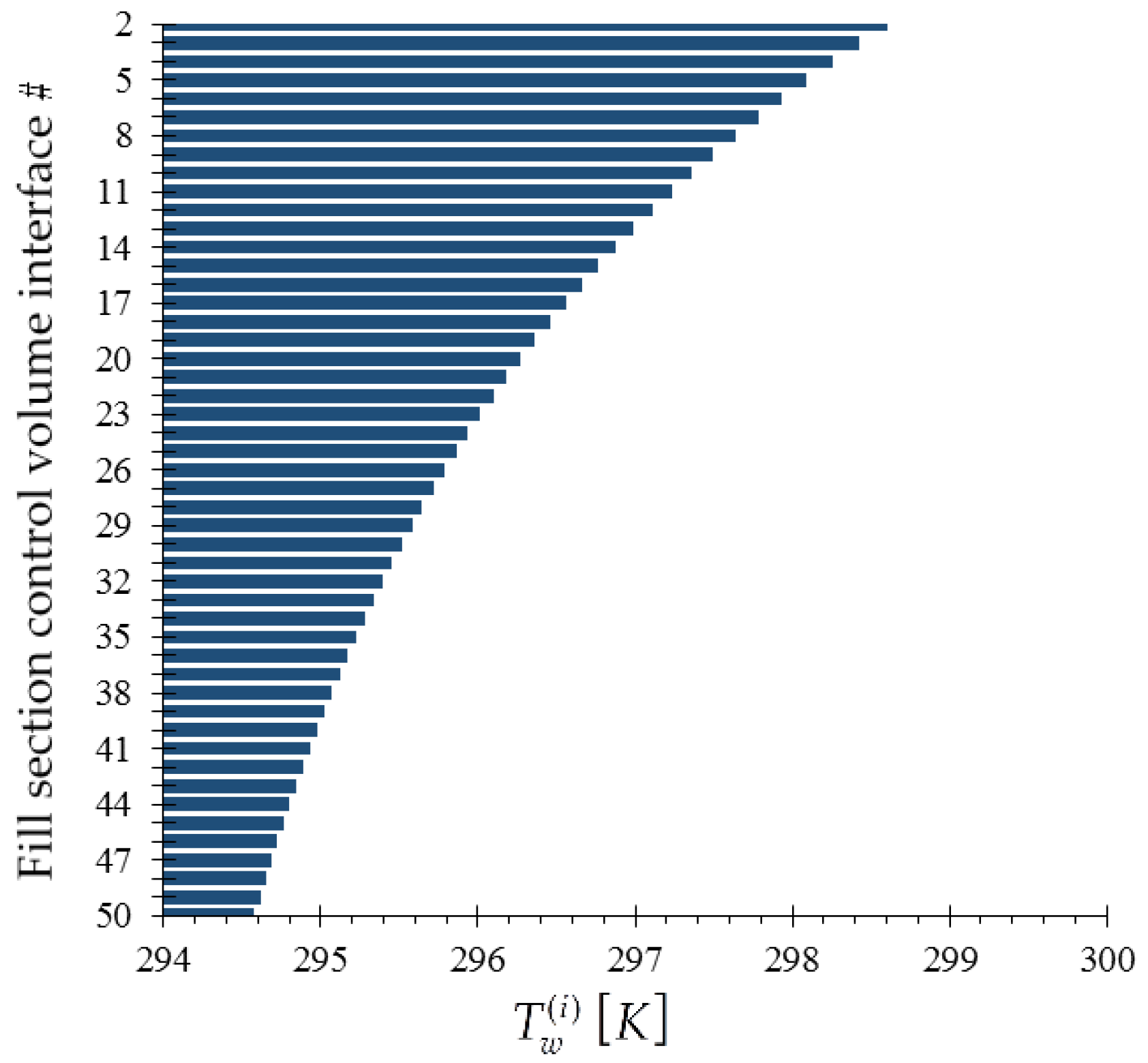
, the water temperatures
, the air temperatures
, and the air relative humidity,
, at the exit of each control volume, are presented in
Figure 4,
Figure 5,
Figure 6 and
Figure 7, below.
2.2. Development of the Cooling Tower Adjoint Sensitivity Model, with Solution Verification
All of the responses of interest in this work, e.g., the experimentally measured and/or computed responses discussed in the previous Sections, can be generally represented in the functional form
, where
is a known functional of the model’s state functions and parameters. As generally shown in [
2], the sensitivity of such as this response to arbitrary variations in the model’s parameters
and state functions
is provided by the response’s Gateaux (G-) differential
, which is defined as follows:
where the so-called “direct effect” term,
, and the so-called “indirect effect” term,
, are defined, respectively, as follows:
where the components of the vectors
are defined as follows:
Since the model parameters are related to the model’s state functions through Equations (2)–(13), it follows that variations in the model parameter will induce variations in the state variables. More precisely, it has been shown in [
2,
3,
4] that to first-order in the parameter variations, the respective variations in the state variables can be computed by solving the G-differentiated model equations, namely:
Performing the above differentiation on Equations (2) through (13) yields the following forward sensitivity system:
where the components of the vectors
are defined as follows:
The system represented by Equation (26) is called the
forward sensitivity system, which can be solved, in principle, to compute the variations in the state functions for every variation in the model parameters. In turn, the solution of Equation (26) can be used in Equation (24) to compute the “indirect effect” term,
. However, since there are many parameter variations to consider, solving Equation (26) repeatedly to compute
becomes computationally impracticable. The need for solving Equation (26) repeatedly to compute
can be circumvented by applying the Adjoint Sensitivity Analysis Procedure (ASAM) formulated in [
2,
3,
4]. The ASAM proceeds by forming the inner-product of Equation (26) with a yet unspecified vector of the form
, having the same structure as the vector
, transposing the resulting scalar equation and using Equation (24). Furthermore, by requiring that the vector
satisfy the following adjoint sensitivity system:
it ultimately results that the “indirect effect” term can be expressed in the form
The system represented by Equation (28) is called the
adjoint sensitivity system, which –notably– is independent of parameter variations. Therefore, the adjoint sensitivity system needs to be solved only once, to compute the adjoint functions
. In turn, the adjoint functions are used to compute
, efficiently and exactly, using Equation (29). As an illustrative example of computing response sensitivities using the adjoint sensitivity system, consider that the model response of interest is the air relative humidity,
, in a generic control volume i, as given by Equation (21). For this model response, the “direct effect” term, denoted as
, is readily obtained in the form:
where:
On the other hand, the “indirect effect” term, denoted as
, is readily obtained in the form:
where:
The units of the adjoint functions can be determined from Equation (29) through dimensional analysis. Specifically, the units for the adjoint functions satisfy the following relation:
where ”[R]” denotes the unit of the response R, while the units for the respective equations are as follows:
Table 1 below lists the units of the adjoint functions for four responses:
,
,
and
, respectively, in which,
denotes exit air temperature;
denotes exit water temperature;
denotes exit air relative humidity; and
denotes exit water mass flow rate.
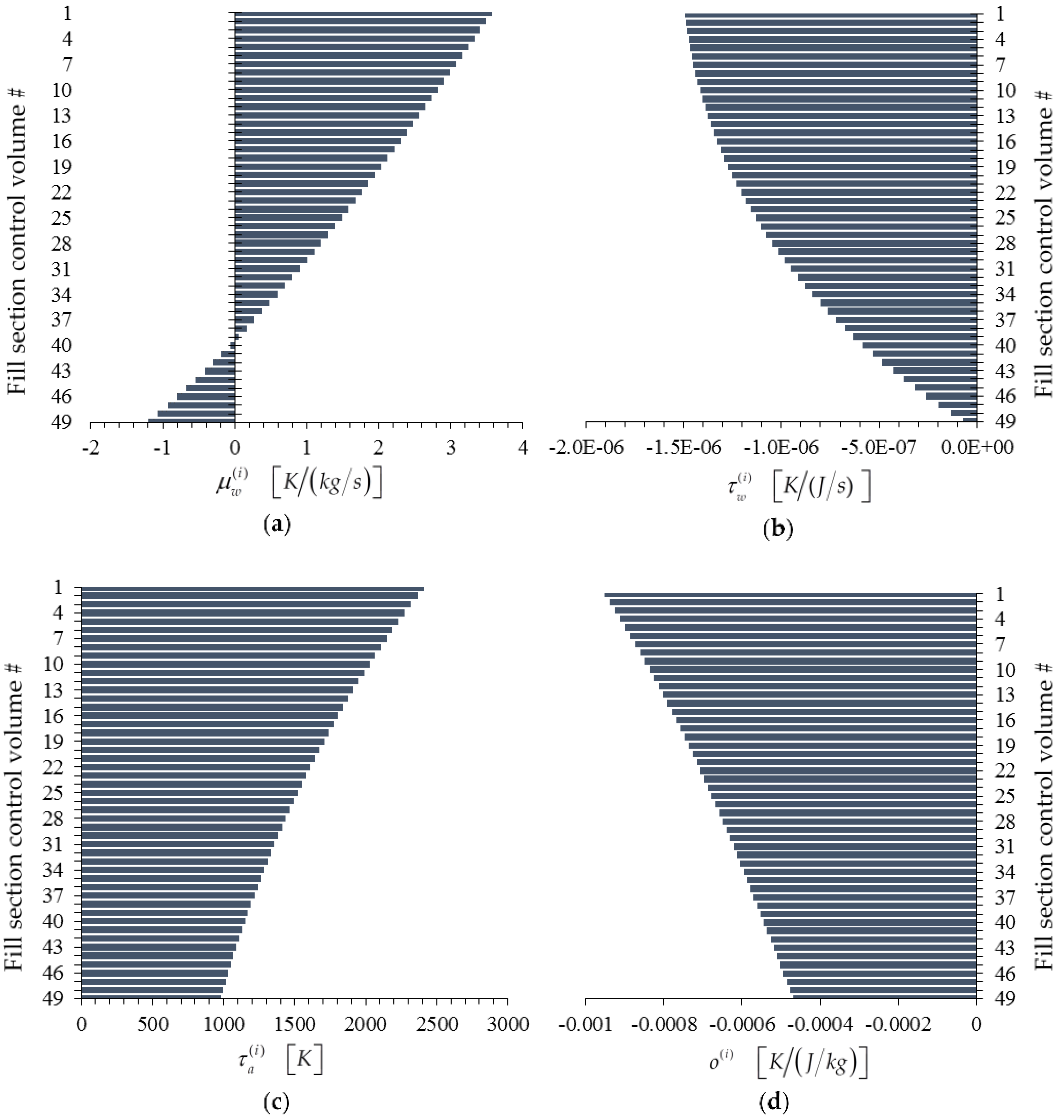
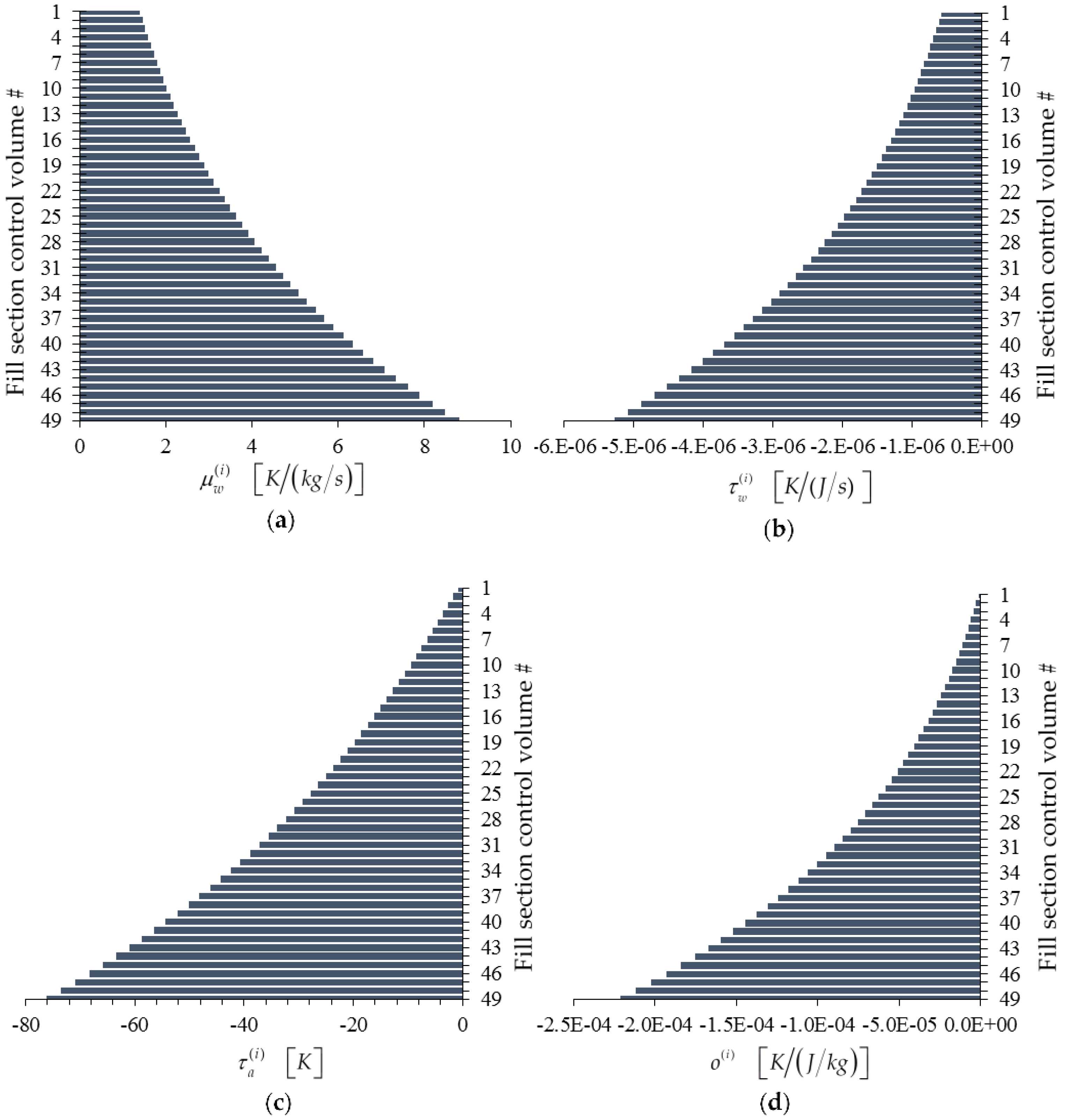
Note that the adjoint sensitivity system represented by Equation (28) is linear in the adjoint state functions, so it can be solved by using numerical methods appropriate for large-scale sparse linear systems. In particular, we solved it by using NSPCG, a “Package for Solving Large Sparse Linear Systems by Various Iterative Methods” [
9]; 12 to 18 iterations sufficed for solving the adjoint system within convergence criterion of
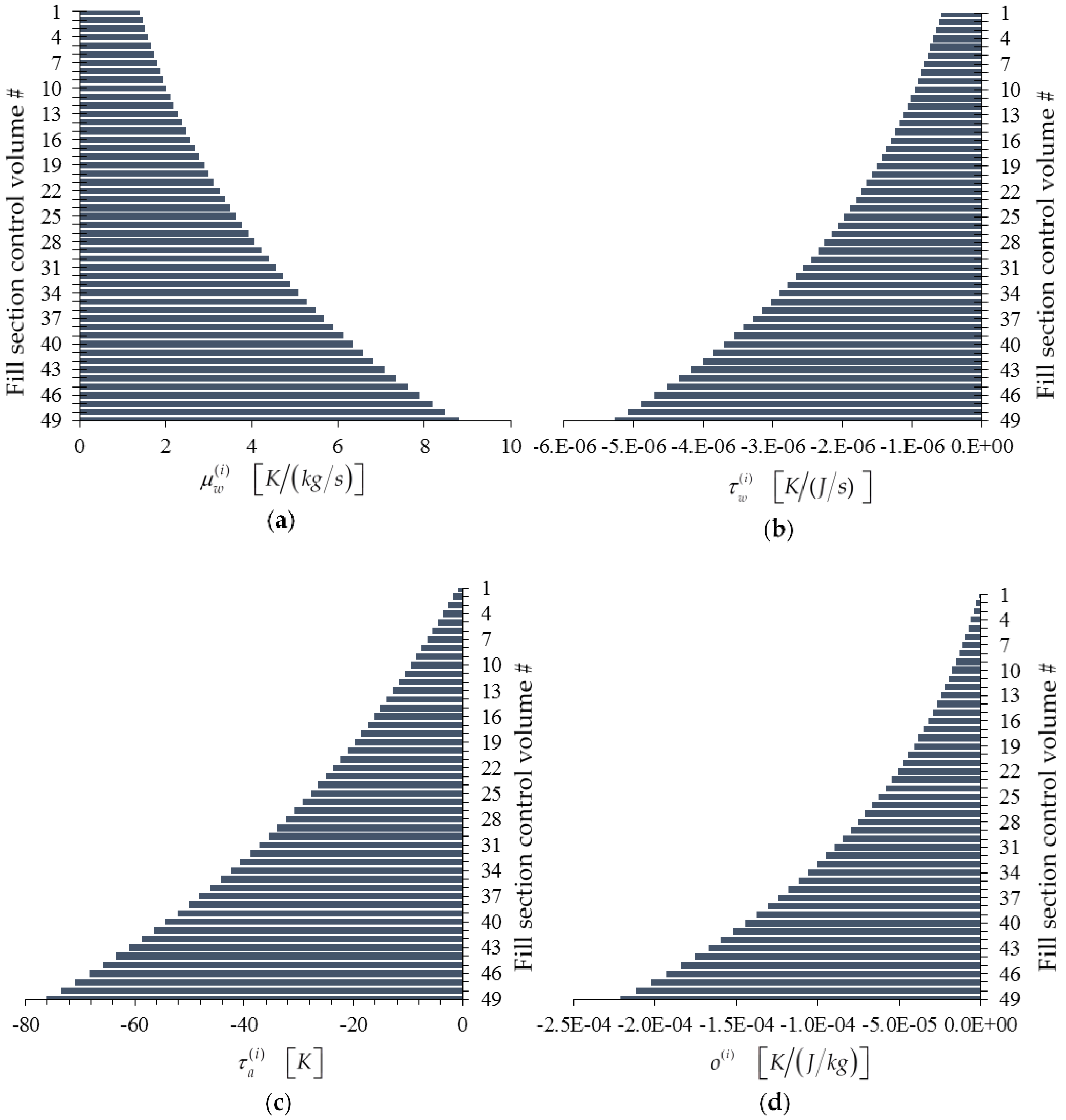
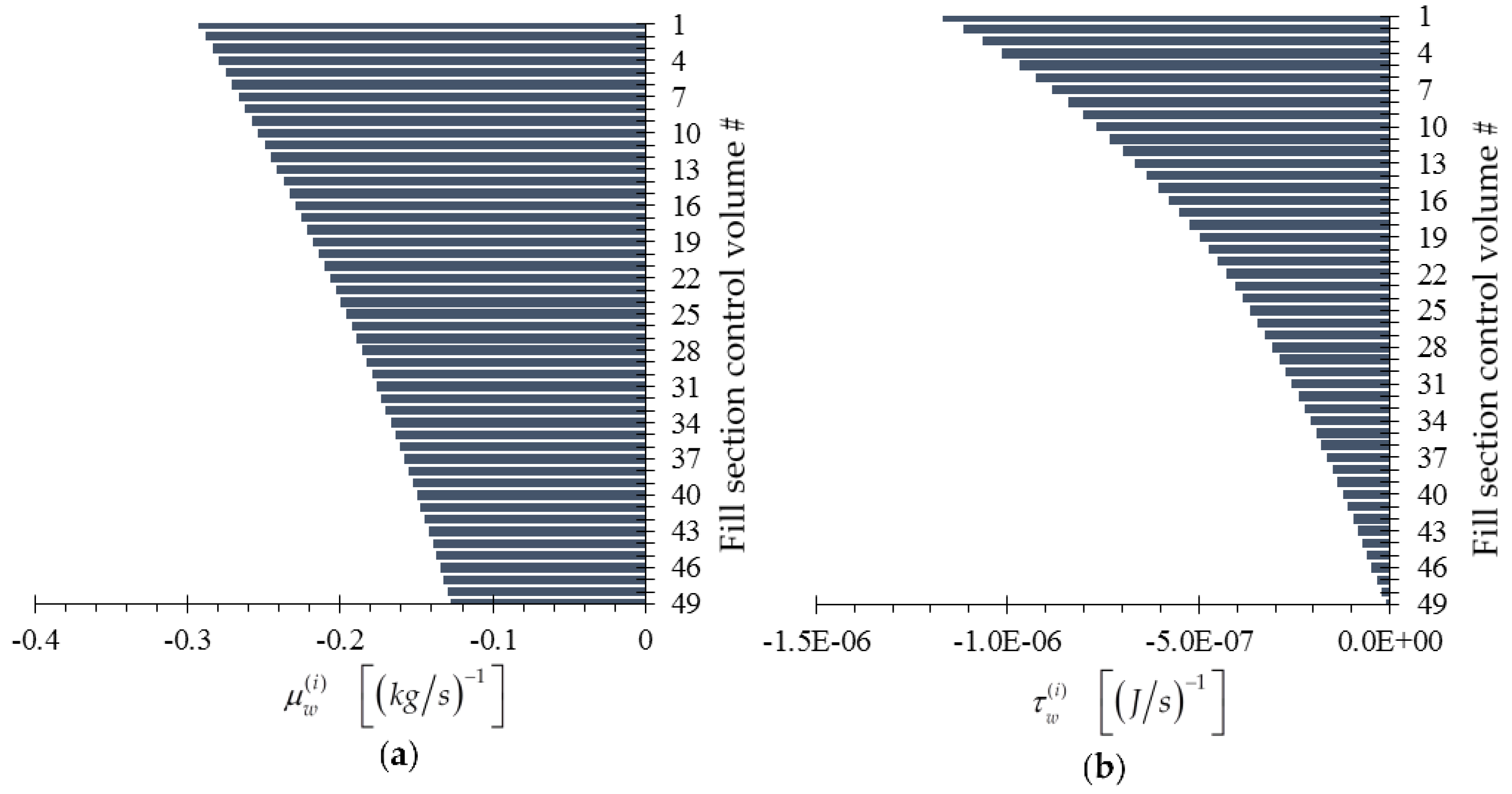
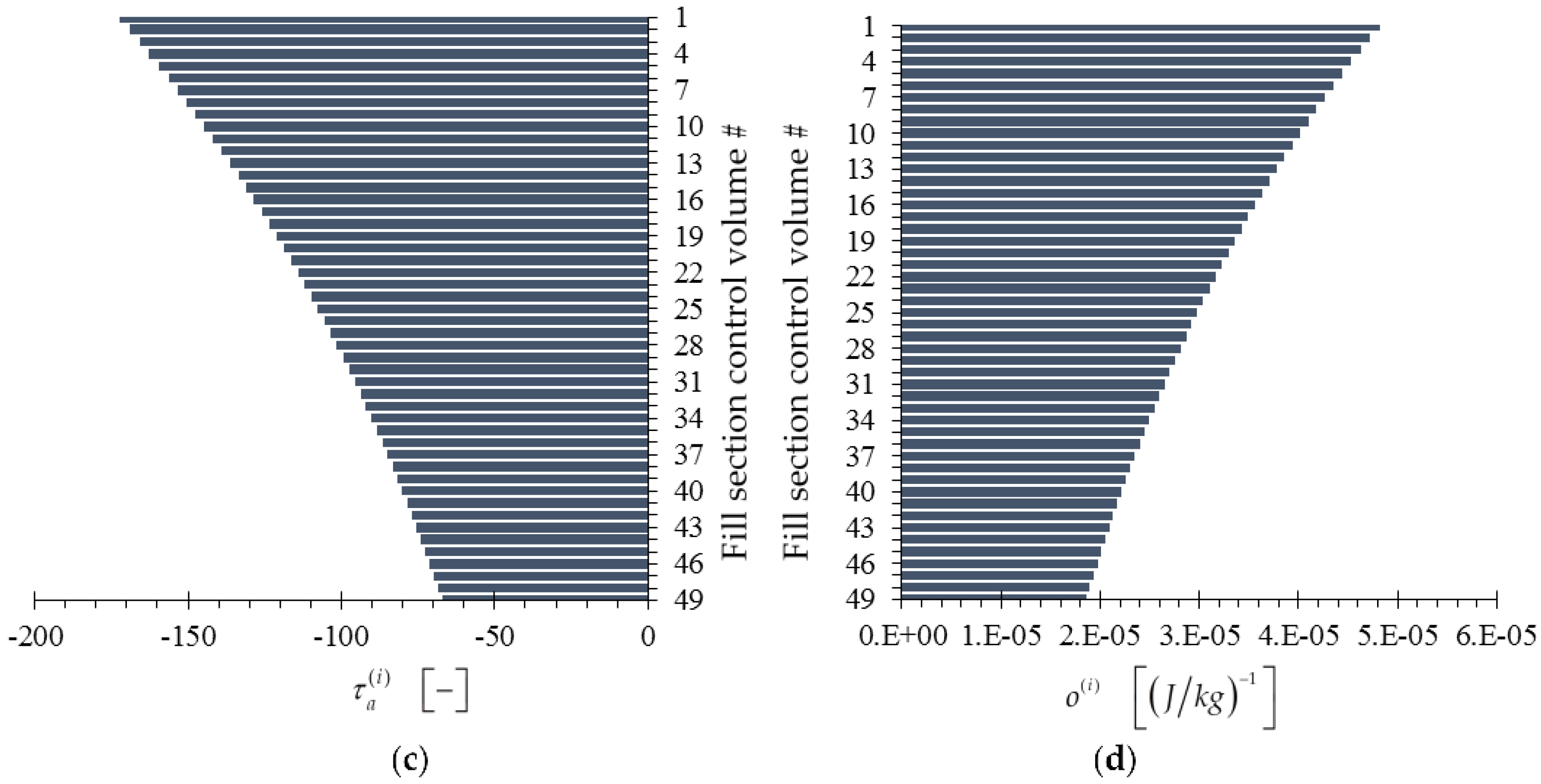
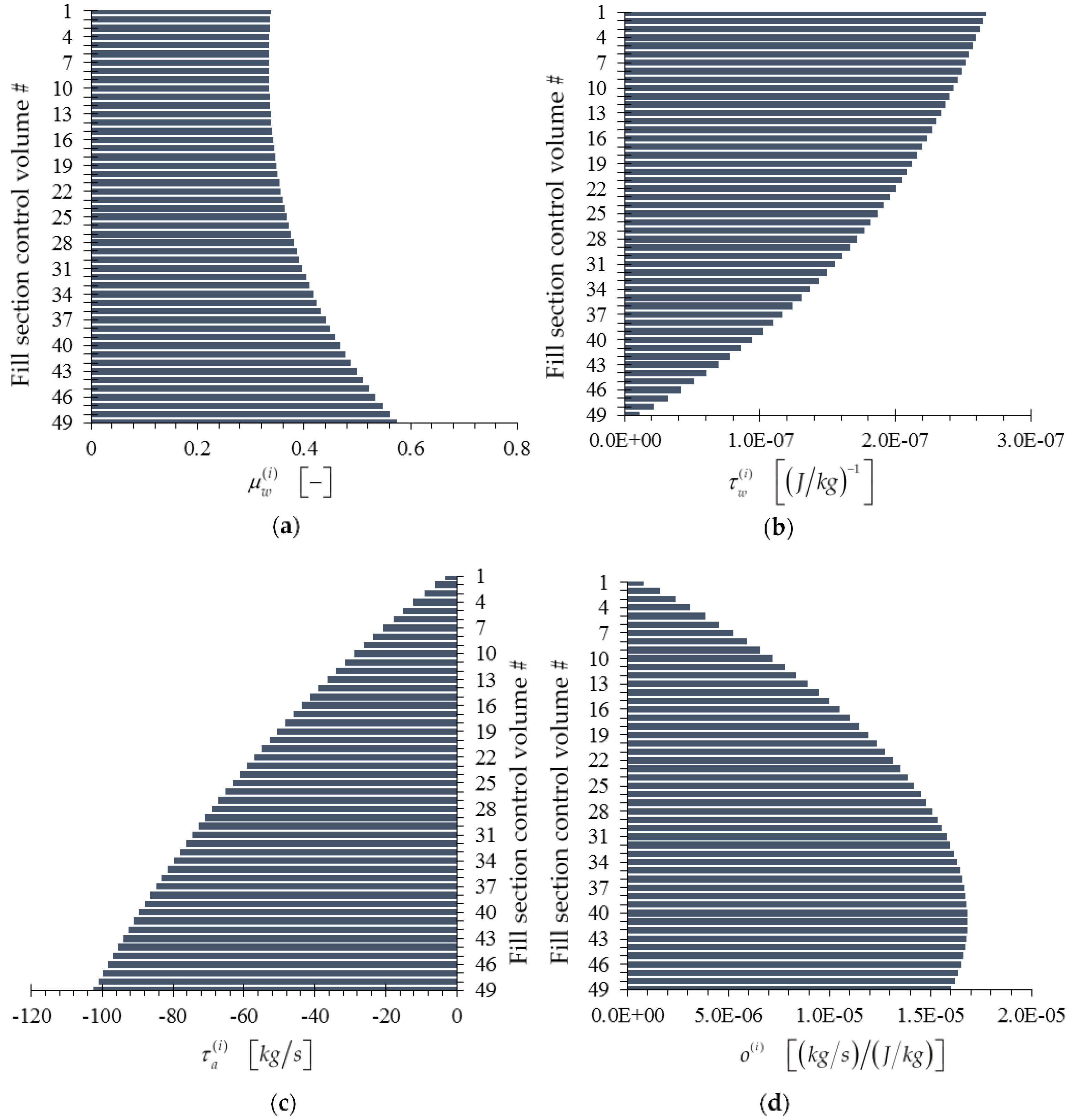
. The bar plots of the adjoint functions corresponding to the four measured responses of interest, namely: (i) the exit air temperature
; (ii) the outlet (exit) water temperature
; (iii) the exit air humidity ratio
; and (iv) the outlet (exit) water mass flow rate
, are presented in
Figure 8,
Figure 9,
Figure 10 and
Figure 11.
The numerical accuracy of the computed adjoint functions can be independently verified by first noting that Equations (22), (23) and (29) imply that:
where
denotes the total number of model parameters, and
denotes the “absolute sensitivity” of the response
with respect to the parameter
, and is defined as:
All of the derivatives with respect to the model parameter
on the right side of Equation (40) are known quantities. On the other hand, the absolute response sensitivity
can be computed independently, as follows:
consider a small perturbation in the model parameter ;
re-compute the perturbed response , where denotes the unperturbed parameter value;
use the finite difference formula:
use the approximate equality between Equations (41) and (40) to obtain independently the respective values of the adjoint function(s) being verified.
The verification procedure described in steps (1)–(4) above, will be illustrated in the remainder of this section, for verifying the adjoint functions depicted in
Figure 8,
Figure 9,
Figure 10 and
Figure 11.
2.2.1. Verification of the Adjoint Functions for the Outlet Air Temperature Response
When
, the quantities
defined in Equation (25) all vanish except for a single component, namely:
Thus, the adjoint functions corresponding to the outlet air temperature response
are computed by solving the adjoint sensitivity system given in Equation (28) using
as the only non-zero source term; for this case, the solution of Equation (28) has been depicted in
Figure 8.
(a) Verification of the adjoint function
Note that the value of the adjoint function
obtained by solving the adjoint sensitivity system given in Equation (28) is
, as indicated in
Figure 8. Now select a variation
in the inlet air temperature
, and note that Equation (40) yields the following expression for the sensitivity of the response
to
:
Re-writing Equation (42) in the form:
indicates that the value of the adjoint function
could be computed independently if the sensitivity
were available, since the quantity
is known. To first-order in the parameter perturbation, the finite-difference formula given in Equation (41) can be used to compute the approximate sensitivity
; subsequently, this value can be used in conjunction with Equation (43) to compute a “finite-difference sensitivity” value, denoted as
, for the respective adjoint, which would be accurate up to second-order in the respective parameter perturbation:
Numerically, the inlet air temperature
has the nominal (“base-case”) value of
. The corresponding nominal value
of the response
is
= 297.4637
. Consider next a perturbation
, for which the perturbed value of the inlet air temperature becomes
. Re-computing the perturbed response by solving Equations (2)–(13) with the value of
yields the “perturbed response” value
297.6073
. Using now the nominal and perturbed response values together with the parameter perturbation in the finite-difference expression given in Equation (41) yields the corresponding “finite-difference-computed sensitivity”
. Using this value together with the nominal values of the other quantities appearing in the expression on the right side of Equation (44) yields
. This result compares well with the value
obtained by solving the adjoint sensitivity system given in Equation (28), cf.,
Figure 8. When solving this adjoint sensitivity system, the computation of
depends on the previously computed adjoint functions
; hence, the forgoing verification of the computational accuracy of
also provides an indirect verification that the functions
, were also computed accurately.
(b) Verification of the adjoint function
Note that the value of the adjoint function
obtained by solving the adjoint sensitivity system given in Equation (28) is
, as indicated in
Figure 8. Now select a variation
in the inlet air humidity ratio
, and note that Equation (40) yields the following expression for the sensitivity of the response
to
:
Re-writing Equation (45) in the form:
indicates that the value of the adjoint function
could be computed independently if the sensitivity
were available, since the
has been verified in (the previous)
Section 2.2.1 (a) and the quantity
is known. To first-order in the parameter perturbation, the finite-difference formula given in Equation (41) can be used to compute the approximate sensitivity
; subsequently, this value can be used in conjunction with Equation (46) to compute a “finite-difference sensitivity” value, denoted as
, for the respective adjoint, which would be accurate up to second-order in the respective parameter perturbation:
Numerically, the inlet air humidity ratio
has the nominal (“base-case”) value of
. The corresponding nominal value
of the response
is
. Consider next a perturbation
, for which the perturbed value of the inlet air humidity ratio becomes
. Re-computing the perturbed response by solving Equations (2)–(13) with the value of
yields the “perturbed response” value
. Using now the nominal and perturbed response values together with the parameter perturbation in the finite-difference expression given in Equation (41) yields the corresponding “finite-difference-computed sensitivity”
. Using this value together with the nominal values of the other quantities appearing in the expression on the right side of Equation (47) yields
. This result compares well with the value
obtained by solving the adjoint sensitivity system given in Equation (28), cf.
Figure 8. When solving this adjoint sensitivity system, the computation of
depends on the previously computed adjoint functions
; hence, the forgoing verification of the computational accuracy of
also provides an indirect verification that the functions
were also computed accurately.
(c) Verification of the adjoint functions and
Note that the values of the adjoint functions
and
obtained by solving the adjoint sensitivity system given in Equation (28) are as follows:
and
, respectively, as indicated in
Figure 8. Now select a variation
in the inlet water temperature
, and note that Equation (40) yields the following expression for the sensitivity of the response
to
:
Since the adjoint functions
and
have been already verified as described in
Section 2.2.1 (a) and (b), it follows that the computed values of adjoint functions
can also be considered as being accurate, since they constitute the starting point for solving the adjoint sensitivity system in Equation (28). Hence, the unknowns in Equation (48) are the adjoint functions
and
. A second equation involving solely these adjoint functions can be derived by selecting a perturbation,
, in the inlet water mass flow rate,
, for which Equation (40) yields the following expression for the sensitivity of the response
to
:
Numerically, the inlet water temperature, , has the nominal (“base-case”) value of , while the nominal (“base-case”) value of the inlet water mass flow rate is . As before, the corresponding nominal value of the response is . Consider now a perturbation , for which the perturbed value of the inlet air temperature becomes . Re-computing the perturbed response by solving Equations (2)–(13) with the value of yields the “perturbed response” value . Using now the nominal and perturbed response values together with the parameter perturbation in the finite-difference expression given in Equation (41) yields the corresponding “finite-difference-computed sensitivity” .
Next, consider a perturbation
, for which the perturbed value of the inlet air temperature becomes
. Re-computing the perturbed response by solving Equations (2)–(13) with the value of
yields the “perturbed response” value
. Using now the nominal and perturbed response values together with the parameter perturbation in the finite-difference expression given in Equation (41) yields the corresponding “finite-difference-computed sensitivity”
. Inserting now all of the numerical values of the known quantities in Equations (48) and (49) yields the following system of coupled equations for obtaining
and
:
Solving Equations (50) and (51) yields
and
. These values compare well with the values
and
, respectively, which are obtained by solving the adjoint sensitivity system given in Equation (28), cf.
Figure 8.
2.2.2. Verification of the Adjoint Functions for the Outlet Water Temperature Response
When
, the quantities
defined in Equation (25) all vanish except for a single component, namely:
Thus, the adjoint functions corresponding to the outlet water temperature response
are computed by solving the adjoint sensitivity system given in Equation (28) using
as the only non-zero source term; for this case, the solution of Equation (28) has been depicted in
Figure 9.
(a) Verification of the adjoint function
Note that the value of the adjoint function
obtained by solving the adjoint sensitivity system given in Equation (28) is
, as indicated in
Figure 9. Now select a variation
in the inlet air temperature
, and note that Equation (40) yields the following expression for the sensitivity of the response
to
:
Re-writing Equation (52) in the form:
indicates that the value of the adjoint function
could be computed independently if the sensitivity
were available, since the quantity
is known. To first-order in the parameter perturbation, the finite-difference formula given in Equation (41) can be used to compute the approximate sensitivity
; subsequently, this value can be used in conjunction with Equation (53) to compute a “finite-difference sensitivity” value, denoted as
, for the respective adjoint, which would be accurate up to second-order in the respective parameter perturbation:
Numerically, the inlet air temperature
has the nominal (“base-case”) value of
. The corresponding nominal value
of the response
is
. Consider next a perturbation
, for which the perturbed value of the inlet air temperature becomes
. Re-computing the perturbed response by solving Equations (2)–(13) with the value of
yields the “perturbed response” value
. Using now the nominal and perturbed response values together with the parameter perturbation in the finite-difference expression given in Equation (41) yields the corresponding “finite-difference-computed sensitivity”
. Using this value together with the nominal values of the other quantities appearing in the expression on the right side of Equation (54) yields
. This result compares well with the value
obtained by solving the adjoint sensitivity system given in Equation (28), cf.,
Figure 9. When solving this adjoint sensitivity system, the computation of
depends on the previously computed adjoint functions
; hence, the forgoing verification of the computational accuracy of
also provides an indirect verification that the functions
were also computed accurately.
(b) Verification of the adjoint function
Note that the value of the adjoint function
obtained by solving the adjoint sensitivity system given in Equation (28) is
, as indicated in
Figure 9. Now select a variation
in the inlet air humidity ratio
, and note that Equation (40) yields the following expression for the sensitivity of the response
to
:
Re-writing Equation (55) in the form
indicates that the value of the adjoint function
could be computed independently if the sensitivity
were available, since the
has been verified in (the previous)
Section 2.2.2 (a) and the quantity
is known. To first-order in the parameter perturbation, the finite-difference formula given in Equation (41) can be used to compute the approximate sensitivity
; subsequently, this value can be used in conjunction with Equation (56) to compute a “finite-difference sensitivity” value, denoted as
, for the respective adjoint, which would be accurate up to second-order in the respective parameter perturbation:
Numerically, the inlet air humidity ratio
has the nominal (“base-case”) value of
. The corresponding nominal value
of the response
is
. Consider next a perturbation
, for which the perturbed value of the inlet air humidity ratio becomes
. Re-computing the perturbed response by solving Equations (2)–(13) with the value of
yields the “perturbed response” value
. Using now the nominal and perturbed response values together with the parameter perturbation in the finite-difference expression given in Equation (41) yields the corresponding “finite-difference-computed sensitivity”
. Using this value together with the nominal values of the other quantities appearing in the expression on the right side of Equation (57) yields
. This result compares well with the value
obtained by solving the adjoint sensitivity system given in Equation (28), cf.
Figure 9. When solving this adjoint sensitivity system, the computation of
depends on the previously computed adjoint functions
; hence, the forgoing verification of the computational accuracy of
also provides an indirect verification that the functions
were also computed accurately.
(c) Verification of the adjoint functions and
Note that the values of the adjoint functions
and
obtained by solving the adjoint sensitivity system given in Equation (28) are as follows:
and
, respectively, as indicated in
Figure 9. Now select a variation
in the inlet water temperature
, and note that Equation (40) yields the following expression for the sensitivity of the response
to
:
Since the adjoint functions
and
have been already verified as described in
Section 2.2.2 (a) and (b), it follows that the computed values of adjoint functions
can also be considered as being accurate, since they constitute the starting point for solving the adjoint sensitivity system in Equation (28). Hence, the unknowns in Equation (58) are the adjoint functions
and
. A second equation involving solely these adjoint functions can be derived by selecting a perturbation,
, in the inlet water mass flow rate,
, for which Equation (40) yields the following expression for the sensitivity of the response
to
:
Numerically, the inlet water temperature, , has the nominal (“base-case”) value of , while the nominal (“base-case”) value of the inlet water mass flow rate is . As before, the corresponding nominal value of the response is . Consider now a perturbation , for which the perturbed value of the inlet air temperature becomes . Re-computing the perturbed response by solving Equations (2)–(13) with the value of yields the “perturbed response” value . Using now the nominal and perturbed response values together with the parameter perturbation in the finite-difference expression given in Equation (41) yields the corresponding “finite-difference-computed sensitivity” .
Next, consider a perturbation
, for which the perturbed value of the inlet air temperature becomes
. Re-computing the perturbed response by solving Equations (2)–(13) with the value of
yields the “perturbed response” value
. Using now the nominal and perturbed response values together with the parameter perturbation in the finite-difference expression given in Equation (41) yields the corresponding “finite-difference-computed sensitivity”
. Inserting now all of the numerical values of the known quantities in Equations (58) and (59) yields the following system of coupled equations for obtaining
and
:
Solving Equations (60) and (61) yields
and
. These values compare well with the values
and
, respectively, which are obtained by solving the adjoint sensitivity system given in Equation (28), cf.
Figure 9.
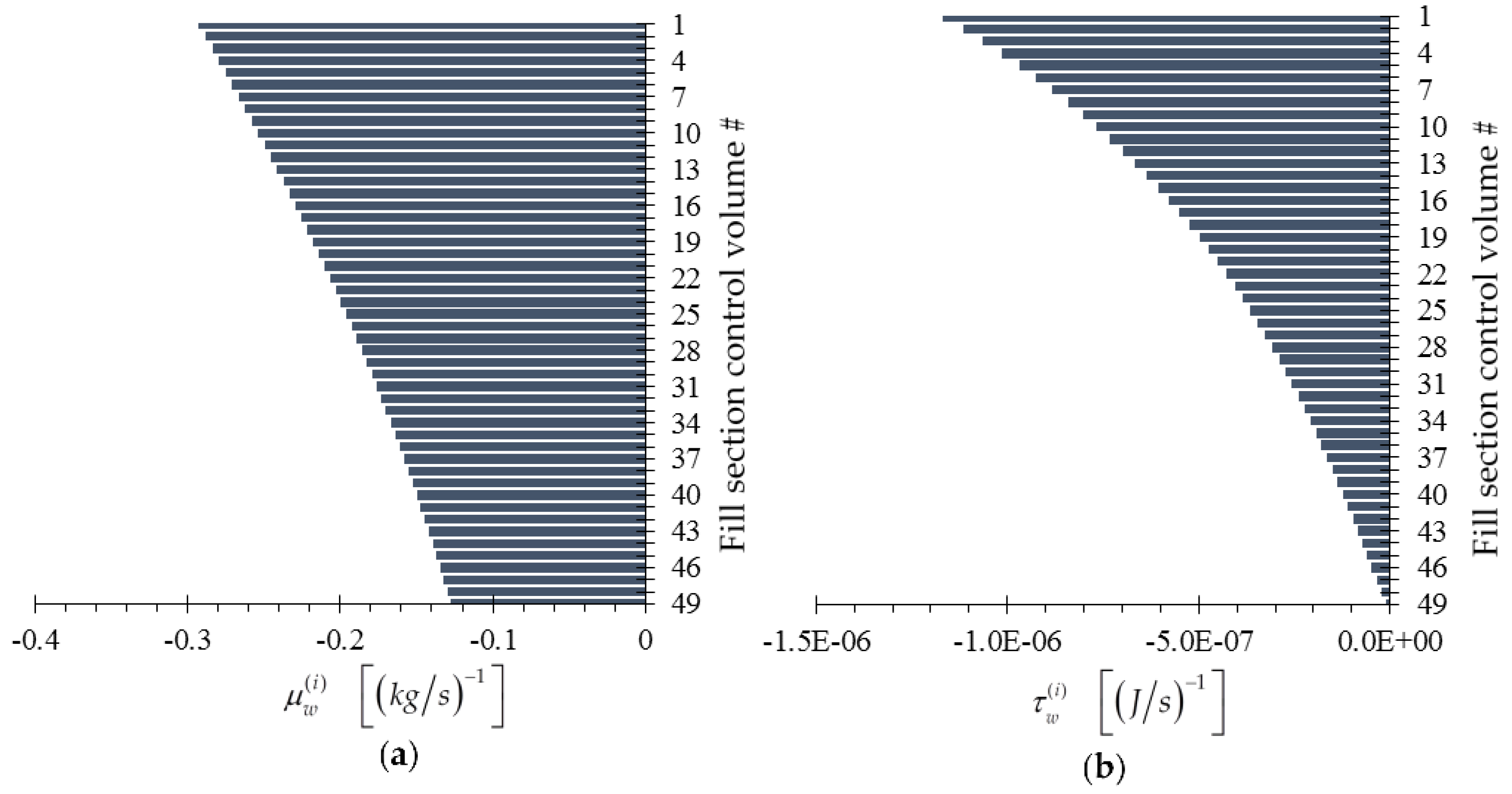
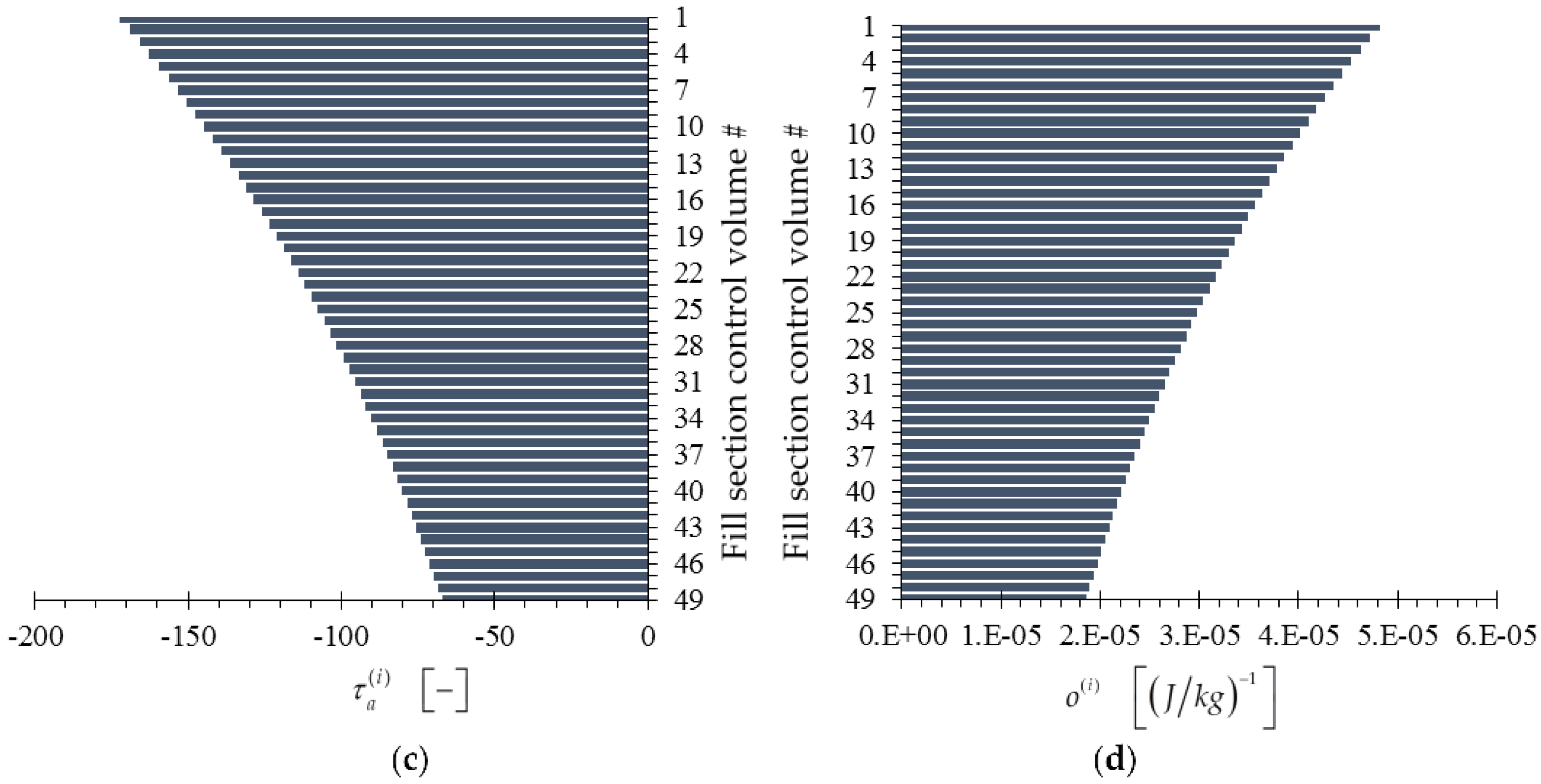
2.2.3. Verification of the Adjoint Functions for the Outlet Air Relative Humidity Response
When
, the quantities
defined in Equation (25) all vanish except for two components, namely:
Thus, the adjoint functions corresponding to the outlet air relative humidity response
are computed by solving the adjoint sensitivity system given in Equation (28) using
and
as the only two non-zero source terms; for this case, the solution of Equation (28) has been depicted in
Figure 10.
(a) Verification of the adjoint function
Note that the value of the adjoint function
obtained by solving the adjoint sensitivity system given in Equation (28) is
, as indicated in
Figure 10. Now select a variation
in the inlet air temperature
, and note that Equation (40) yields the following expression for the sensitivity of the response
to
:
Re-writing Equation (64) in the form:
indicates that the value of the adjoint function
could be computed independently if the sensitivity
were available, since the quantity
is known. To first-order in the parameter perturbation, the finite-difference formula given in Equation (41) can be used to compute the approximate sensitivity
; subsequently, this value can be used in conjunction with Equation (65) to compute a “finite-difference sensitivity” value, denoted as
, for the respective adjoint, which would be accurate up to second-order in the parameter perturbation:
Numerically, the inlet air temperature
has the nominal (“base-case”) value of
. The corresponding nominal value
of the response
is
. Consider next a perturbation
, for which the perturbed value of the inlet air temperature becomes
. Re-computing the perturbed response by solving Equations (2)–(13) with the value of
yields the “perturbed response” value
. Using now the nominal and perturbed response values together with the parameter perturbation in the finite-difference expression given in Equation (41) yields the corresponding “finite-difference-computed sensitivity”
. Using this value together with the nominal values of the other quantities appearing in the expression on the right side of Equation (66) yields
. This result compares well with the value
obtained by solving the adjoint sensitivity system given in Equation (28), cf.,
Figure 10. When solving this adjoint sensitivity system, the computation of
depends on the previously computed adjoint functions
; hence, the forgoing verification of the computational accuracy of
also provides an indirect verification that the functions
were also computed accurately.
(b) Verification of the adjoint function
Note that the value of the adjoint function
obtained by solving the adjoint sensitivity system given in Equation (28) is
, as indicated in
Figure 10. Now select a variation
in the inlet air humidity ratio
, and note that Equation (40) yields the following expression for the sensitivity of the response
to
:
Re-writing Equation (67) in the form
indicates that the value of the adjoint function
could be computed independently if the sensitivity
were available, since the
has been verified in (the previous)
Section 2.2.3 (a) and the quantity
is known. To first-order in the parameter perturbation, the finite-difference formula given in Equation (41) can be used to compute the approximate sensitivity
; subsequently, this value can be used in conjunction with Equation (68) to compute a “finite-difference sensitivity” value, denoted as
, for the respective adjoint, which would be accurate up to second-order in the parameter perturbation:
Numerically, the inlet air humidity ratio
has the nominal (“base-case”) value of
. The corresponding nominal value
of the response
is
. Consider next a perturbation
, for which the perturbed value of the inlet air humidity ratio becomes
. Re-computing the perturbed response by solving Equations (2)–(13) with the value of
yields the “perturbed response” value
. Using now the nominal and perturbed response values together with the parameter perturbation in the finite-difference expression given in Equation (41) yields the corresponding “finite-difference-computed sensitivity”
. Using this value together with the nominal values of the other quantities appearing in the expression on the right side of Equation (69) yields
. This result compares well with the value
obtained by solving the adjoint sensitivity system given in Equation (28), cf.
Figure 10. When solving this adjoint sensitivity system, the computation of
depends on the previously computed adjoint functions
; hence, the forgoing verification of the computational accuracy of
also provides an indirect verification that the functions
were also computed accurately.
(c) Verification of the adjoint functions and
Note that the values of the adjoint functions
and
obtained by solving the adjoint sensitivity system given in Equation (28) are as follows:
and
, respectively, as indicated in
Figure 10. Now select a variation
in the inlet water temperature
, and note that Equation (40) yields the following expression for the sensitivity of the response
to
:
Since the adjoint functions
and
have been already verified as described in
Section 2.2.3 (a) and (b), it follows that the computed values of adjoint functions
and
can also be considered as being accurate, since they constitute the starting point for solving the adjoint sensitivity system in Equation (28). Hence, the unknowns in Equation (70) are the adjoint functions
and
. A second equation involving solely these adjoint functions can be derived by selecting a perturbation,
, in the inlet water mass flow rate,
, for which Equation (40) yields the following expression for the sensitivity of the response
to
:
Numerically, the inlet water temperature, , has the nominal (“base-case”) value of , while the nominal (“base-case”) value of the inlet water mass flow rate is . As before, the corresponding nominal value of the response is . Consider now a perturbation , for which the perturbed value of the inlet air temperature becomes . Re-computing the perturbed response by solving Equations (2)–(13) with the value of yields the “perturbed response” value . Using now the nominal and perturbed response values together with the parameter perturbation in the finite-difference expression given in Equation (41) yields the corresponding “finite-difference-computed sensitivity” .
Next, consider a perturbation
, for which the perturbed value of the inlet air temperature becomes
. Re-computing the perturbed response by solving Equations (2)–(13) with the value of
yields the “perturbed response” value
. Using now the nominal and perturbed response values together with the parameter perturbation in the finite-difference expression given in Equation (41) yields the corresponding “finite-difference-computed sensitivity”
. Inserting now all of the numerical values of the known quantities in Equations (70) and (71) yields the following system of coupled equations for obtaining
and
:
Solving Equations (72) and (73) yields
and
. These values compare well with the values
and
, respectively, which are obtained by solving the adjoint sensitivity system given in Equation (28), cf.
Figure 10.
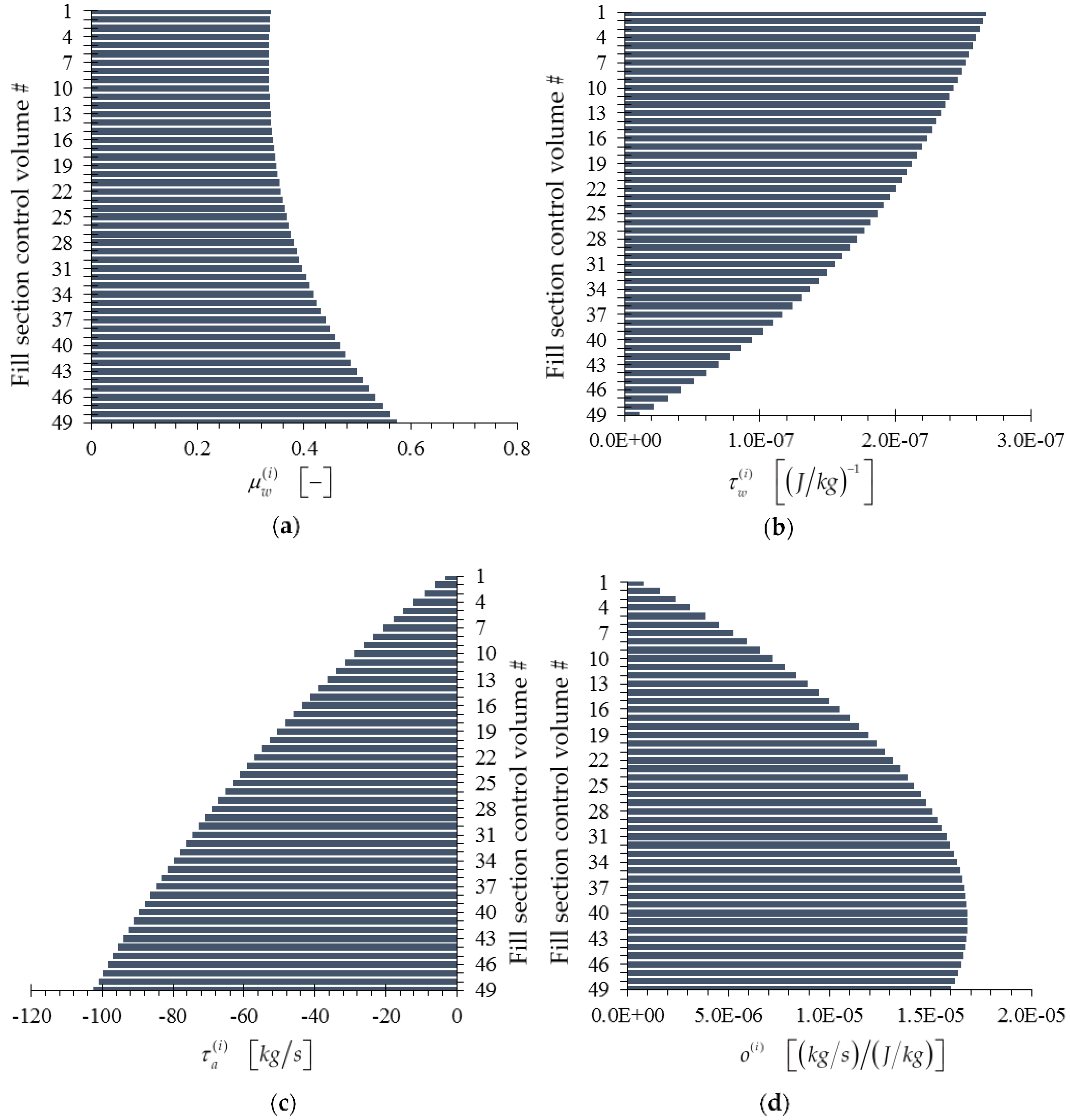
2.2.4. Verification of the Adjoint Functions for the Outlet Water Mass Flow Rate Response
When
, the quantities
defined in Equation (25) all vanish except for a single component, namely:
Thus, the adjoint functions corresponding to the outlet water mass flow rate response
are computed by solving the adjoint sensitivity system given in Equation (28) using
as the only non-zero source term; for this case, the solution of Equation (28) has been depicted in
Figure 11.
(a) Verification of the adjoint function
Note that the value of the adjoint function
obtained by solving the adjoint sensitivity system given in Equation (28) is
, as indicated in
Figure 11. Now select a variation
in the inlet air temperature
, and note that Equation (40) yields the following expression for the sensitivity of the response
to
:
Re-writing Equation (74) in the form:
indicates that the value of the adjoint function
could be computed independently if the sensitivity
were available, since the quantity
is known. To first-order in the parameter perturbation, the finite-difference formula given in Equation (41) can be used to compute the approximate sensitivity
; subsequently, this value can be used in conjunction with Equation (75) to compute a “finite-difference sensitivity” value, denoted as
, for the respective adjoint, which would be accurate up to second-order in the parameter perturbation:
Numerically, the inlet air temperature
has the nominal (“base-case”) value of
. The corresponding nominal value
of the response
is
. Consider next a perturbation
, for which the perturbed value of the inlet air temperature becomes
. Re-computing the perturbed response by solving Equations (2)–(13) with the value of
yields the “perturbed response” value
. Using now the nominal and perturbed response values together with the parameter perturbation in the finite-difference expression given in Equation (41) yields the corresponding “finite-difference-computed sensitivity”
. Using this value together with the nominal values of the other quantities appearing in the expression on the right side of Equation (76) yields
. This result compares well with the value
obtained by solving the adjoint sensitivity system given in Equation (28), cf.,
Figure 11. When solving this adjoint sensitivity system, the computation of
depends on the previously computed adjoint functions
; hence, the forgoing verification of the computational accuracy of
also provides an indirect verification that the functions
were also computed accurately.
(b) Verification of the adjoint function
Note that the value of the adjoint function
obtained by solving the adjoint sensitivity system given in Equation (28) is
, as indicated in
Figure 11. Now select a variation
in the inlet air humidity ratio
, and note that Equation (40) yields the following expression for the sensitivity of the response
to
:
Re-writing Equation (77) in the form:
indicates that the value of the adjoint function
could be computed independently if the sensitivity
were available, since the
has been verified in (the previous)
Section 2.2.4 (a) and the quantity
is known. To first-order in the parameter perturbation, the finite-difference formula given in Equation (41) can be used to compute the approximate sensitivity
; subsequently, this value can be used in conjunction with Equation (78) to compute a “finite-difference sensitivity” value, denoted as
, for the respective adjoint, which would be accurate up to second-order in the parameter perturbation:
Numerically, the inlet air humidity ratio
has the nominal (“base-case”) value of
. The corresponding nominal value
of the response
is
. Consider next a perturbation
, for which the perturbed value of the inlet air humidity ratio becomes
. Re-computing the perturbed response by solving Equations (2)–(13) with the value of
yields the “perturbed response” value
. Using now the nominal and perturbed response values together with the parameter perturbation in the finite-difference expression given in Equation (41) yields the corresponding “finite-difference-computed sensitivity”
. Using this value together with the nominal values of the other quantities appearing in the expression on the right side of Equation (79) yields
. This result compares well with the value
obtained by solving the adjoint sensitivity system given in Equation (28), cf.
Figure 11. When solving this adjoint sensitivity system, the computation of
depends on the previously computed adjoint functions
; hence, the forgoing verification of the computational accuracy of
also provides an indirect verification that the functions
were also computed accurately.
(c) Verification of the adjoint functions and
Note that the values of the adjoint functions
and
obtained by solving the adjoint sensitivity system given in Equation (28) are as follows:
and
, respectively, as indicated in
Figure 11. Now select a variation
in the inlet water temperature
, and note that Equation (40) yields the following expression for the sensitivity of the response
to
:
Since the adjoint functions
and
have been already verified as described in
Section 2.2.4 (a) and (b), it follows that the computed values of adjoint functions
can also be considered as being accurate, since they constitute the starting point for solving the adjoint sensitivity system in Equation (28). Hence, the unknowns in Equation (80) are the adjoint functions
and
. A second equation involving solely these adjoint functions can be derived by selecting a perturbation,
, in the inlet water mass flow rate,
, for which Equation (40) yields the following expression for the sensitivity of the response
to
:
Numerically, the inlet water temperature, , has the nominal (“base-case”) value of , while the nominal (“base-case”) value of the inlet water mass flow rate is . As before, the corresponding nominal value of the response is . Consider now a perturbation , for which the perturbed value of the inlet air temperature becomes . Re-computing the perturbed response by solving Equations (2)–(13) with the value of yields the “perturbed response” value . Using now the nominal and perturbed response values together with the parameter perturbation in the finite-difference expression given in Equation (41) yields the corresponding “finite-difference-computed sensitivity” .
Next, consider a perturbation
, for which the perturbed value of the inlet air temperature becomes
. Re-computing the perturbed response by solving Equations (2)–(13) with the value of
yields the “perturbed response” value
. Using now the nominal and perturbed response values together with the parameter perturbation in the finite-difference expression given in Equation (41) yields the corresponding “finite-difference-computed sensitivity”
. Inserting now all of the numerical values of the known quantities in Equations (80) and (81) yields the following system of coupled equations for obtaining
and
:
Solving Equations (82) and (83) yields
and
. These values compare well with the values
and
, respectively, which are obtained by solving the adjoint sensitivity system given in Equation (28), cf.
Figure 11.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}