1. Introduction
As the air pollution problems caused by gasoline-powered vehicles have become more and more serious, electric vehicles (EVs) [
1,
2,
3] or hybrid EVs have been regarded as good solutions and gained increasing attention. However, the batteries used in EVs or hybrid EVs have some significant disadvantages, such as high cost and heaviness, limited capacitance and charging/discharging cycles, and long charging time, etc. The roadway-powered EVs [
4,
5,
6,
7,
8] scheme has therefore been discussed to reduce the battery capacitance and to extend the driving range. This study would like to furthermore present the inductive power transfer (IPT) system [
9,
10,
11,
12,
13] for bus-stop-powered EVs [
14] with much less cost than the roadway-powered EVs system.
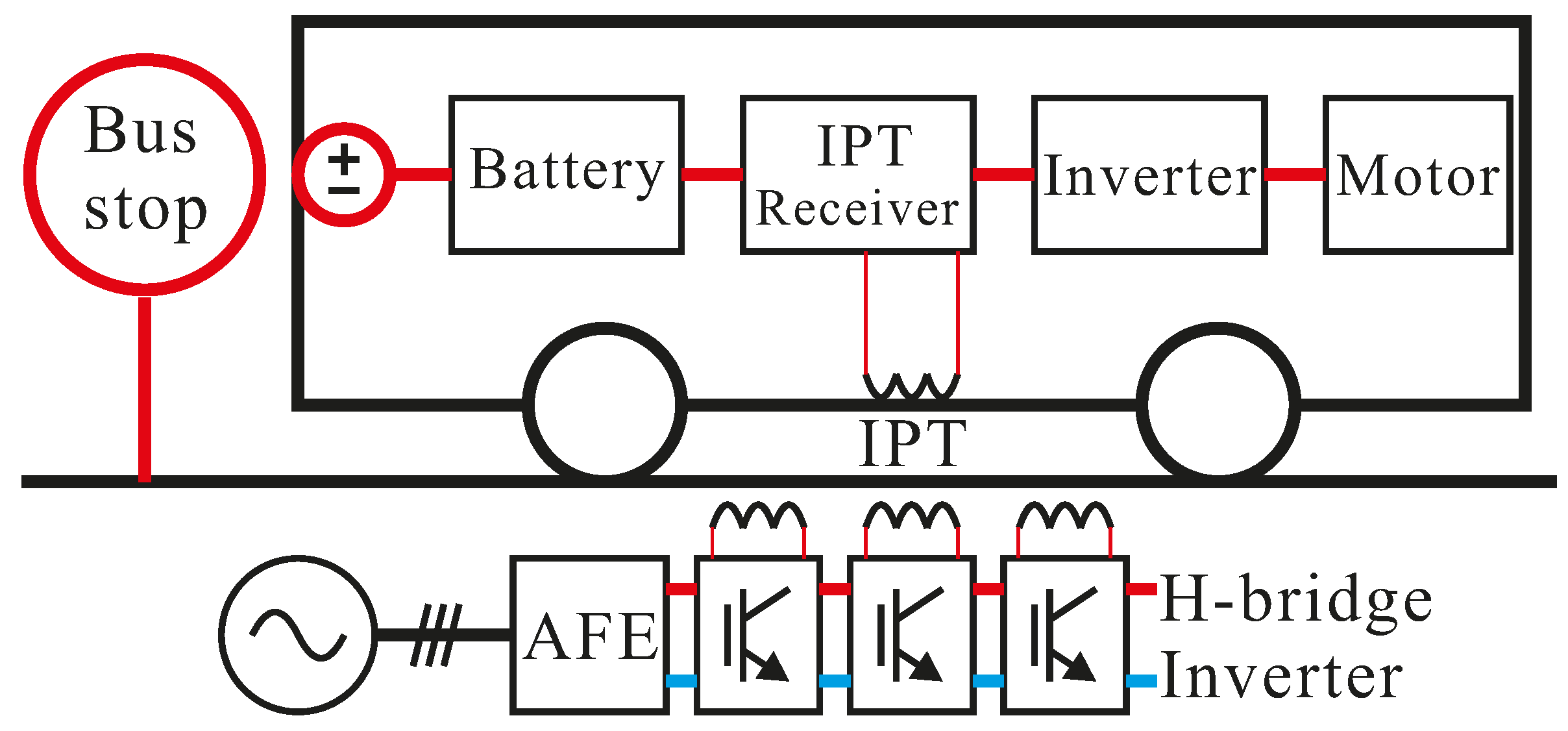
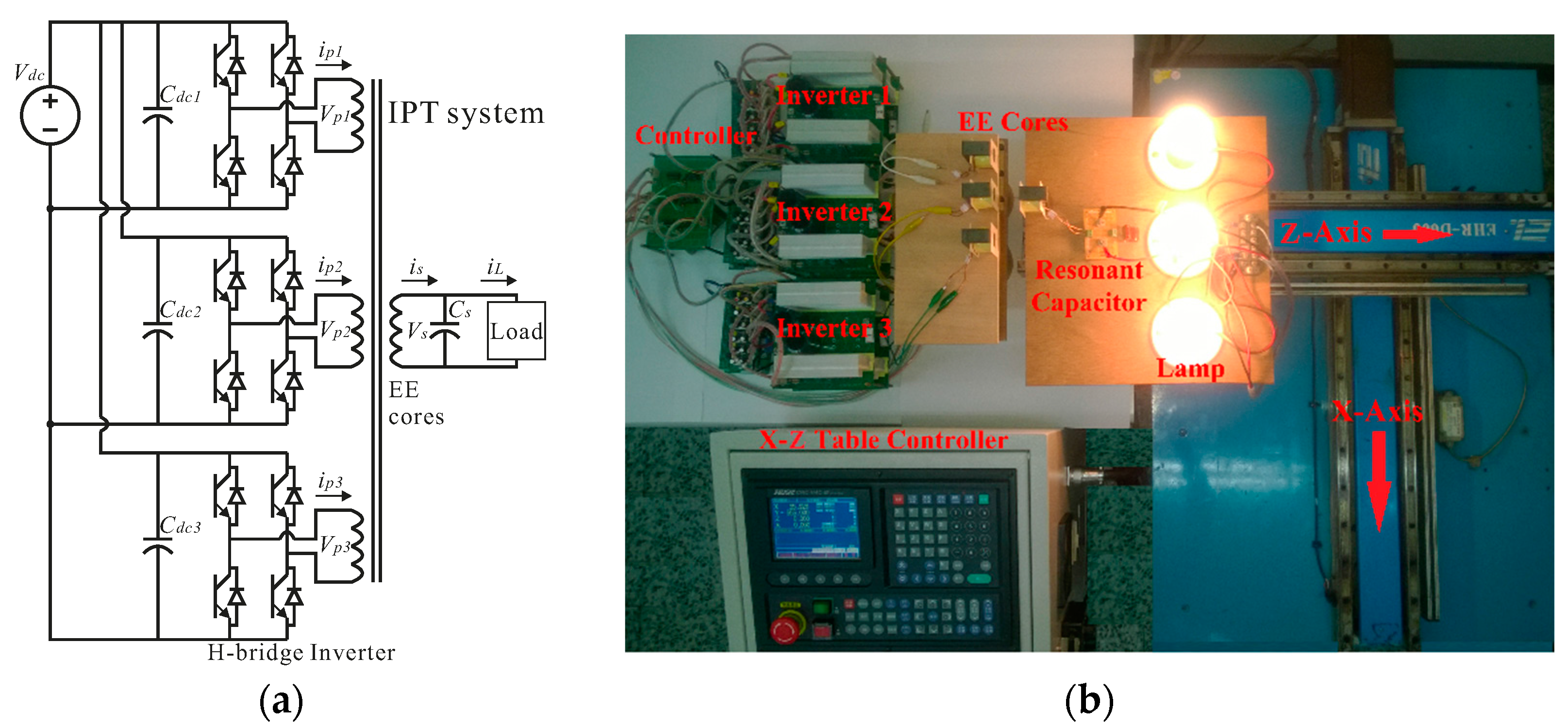
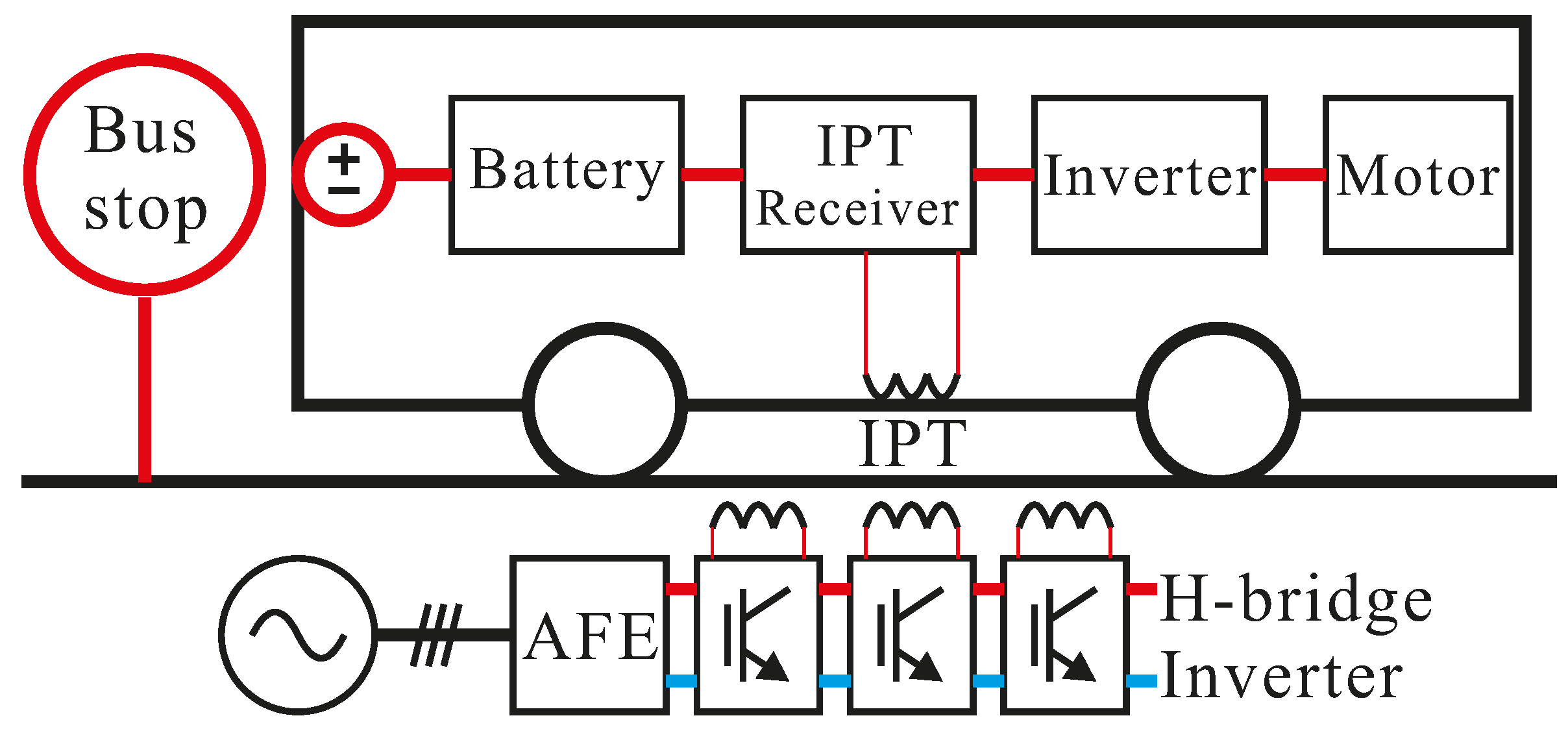
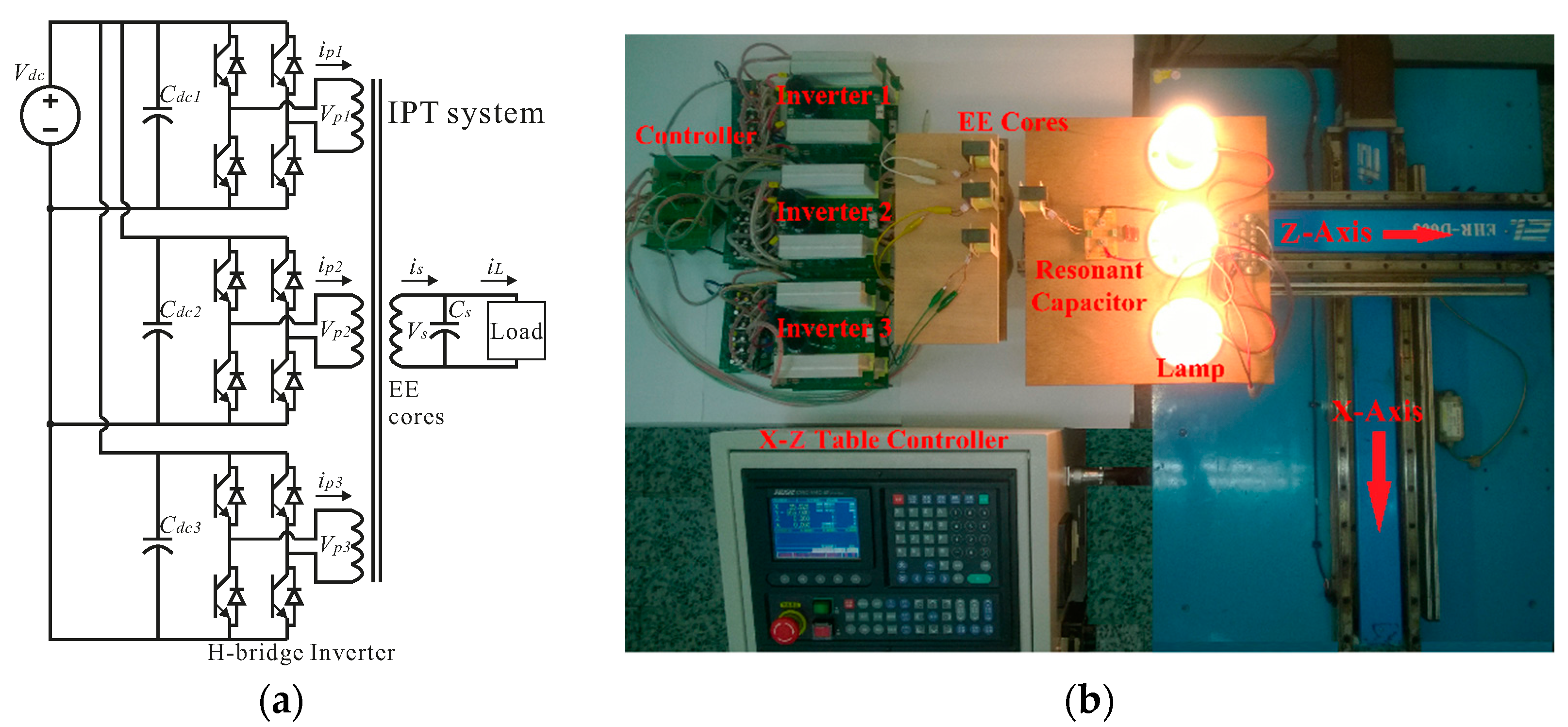
Figure 1 shows the IPT system for bus-stop-powered EVs or hybrid EVs. The active front-end (AFE) converter is utilized as interface between the AC voltage grid and DC voltage grid. The advantages of the AFE converter are bidirectional power flow and low total harmonic distortion (THD) of the line current. The primary side of the IPT system is DC-AC H-bridge inverters. The multi-H-bridge inverters are utilized to increase the transfer power and efficiency of the IPT system. The secondary side of the IPT system is a pick-up coil and receiver built in the EVs or hybrid EVs. The IPT receiver is utilized to charge up battery or supply power to motor through the inverter. The IPT system for moving EVs or hybrid EVs is convenient for charging up battery and could also extend driving range. Furthermore, the position regulation sensors of the IPT system are utilized to control the operation of multi-H-bridge inverters and improve the efficiency of the IPT system.
2. Inductive Power Transfer System
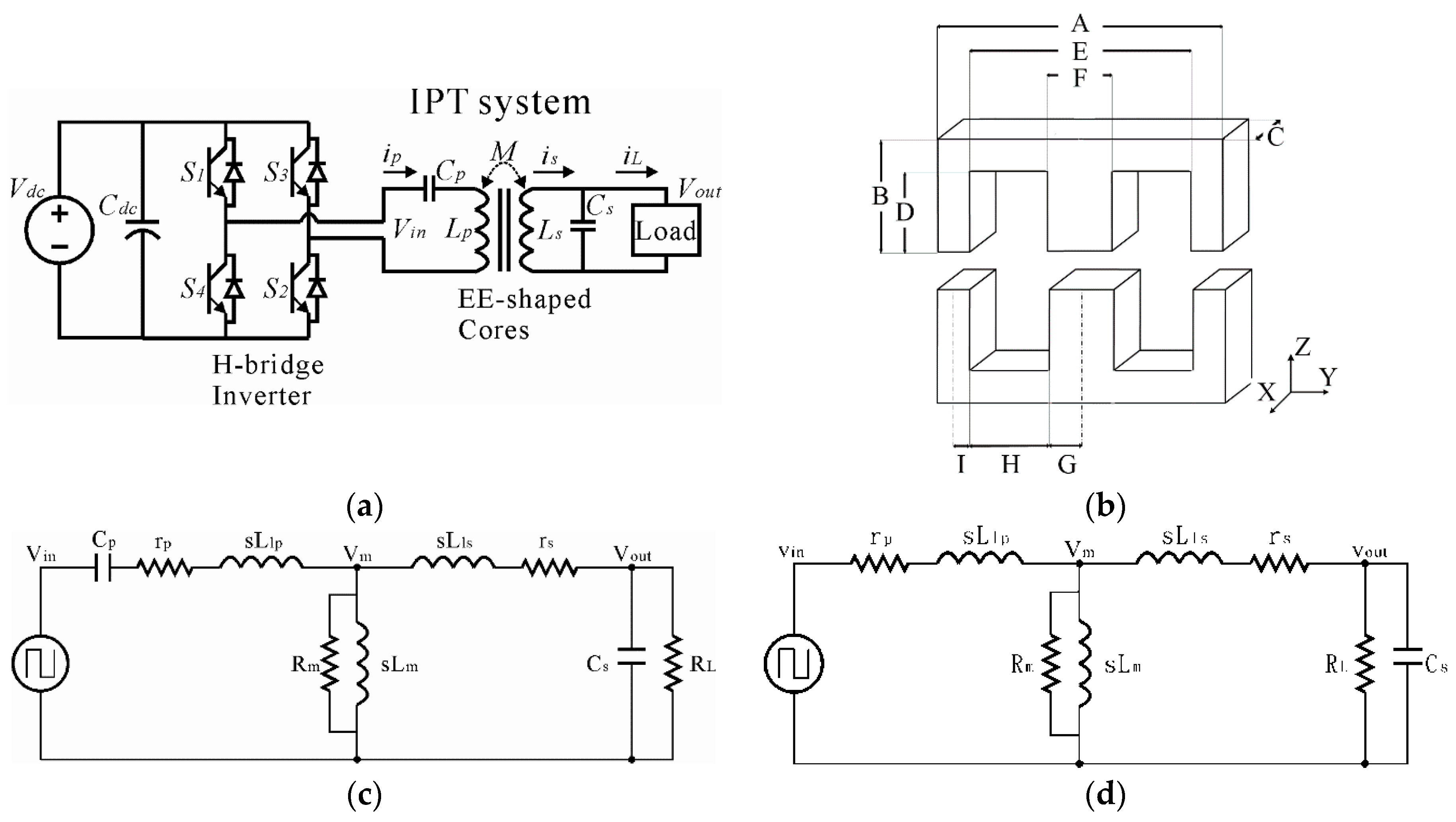
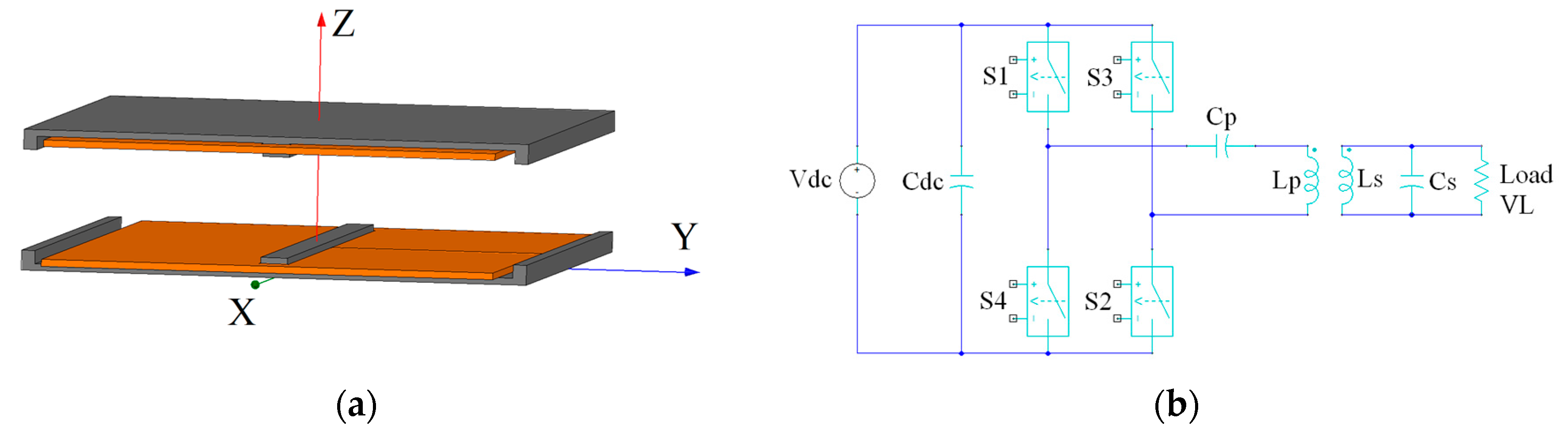
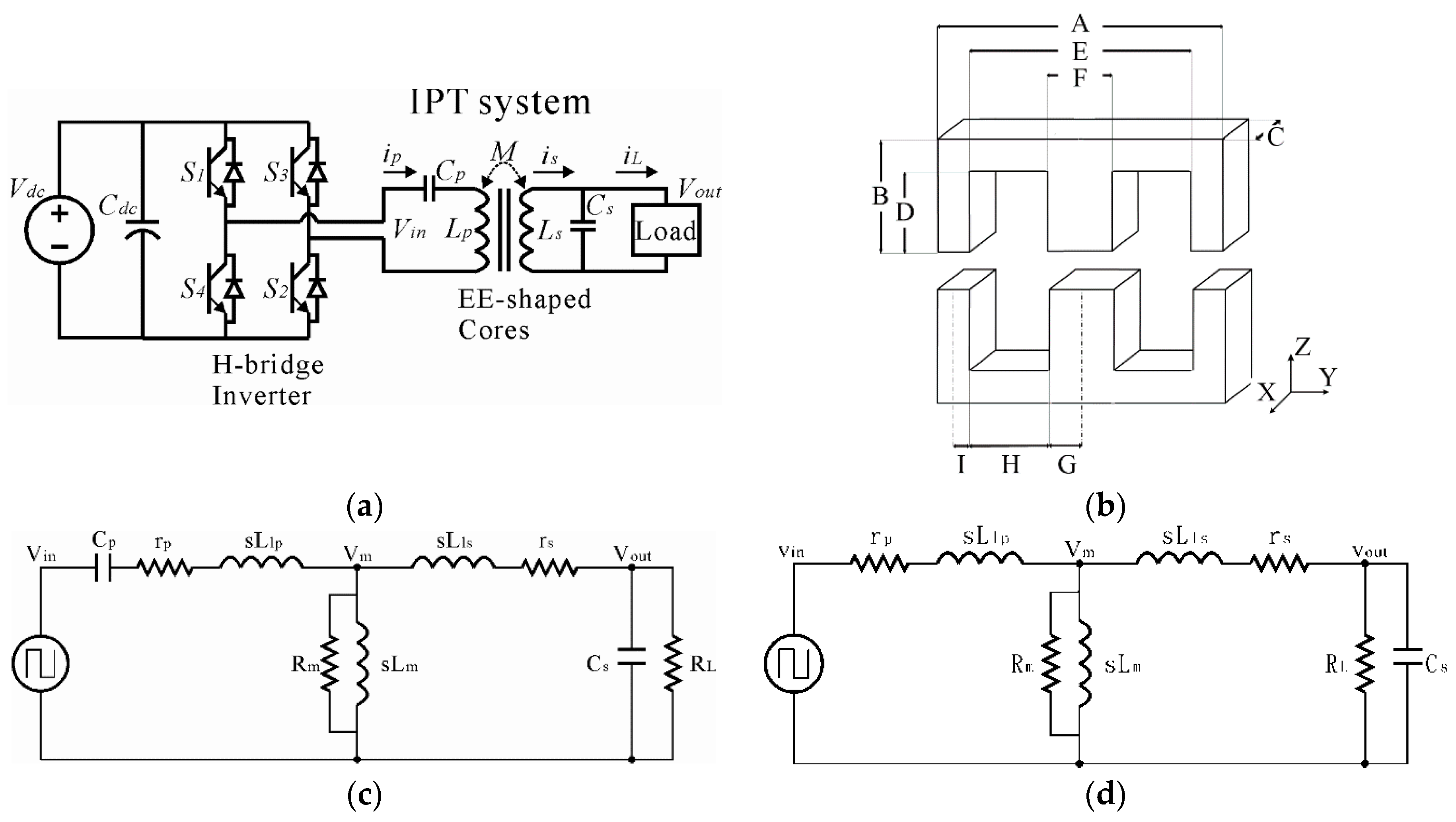
Figure 2 shows the simplified IPT system based on EE-shaped ferrite cores for bus-stop-powered EVs or hybrid EVs. As shown in
Figure 2a, the DC bus voltage is V
dc, the DC-AC H-bridge inverter is utilized to generate the high frequency square wave voltage V
in. The EE-shaped ferrite cores are utilized to transfer the power to secondary side load (by pick-up coil and receiver). The primary inductance and secondary inductance are
Lp and
Ls. The mutual inductance is
M (=
Lm). The coupling coefficient (
k) is defined as in (1):
As shown in
Figure 2b, the dimensions of the EE-shaped cores are A (80 mm), B (38 mm), C (20 mm), D (28 mm), E (59 mm), F (20 mm), G (F/2), H (E/2–F/2), and I (A/4–E/4). The material of the EE-shaped cores is 3C90 made by Ferroxcube (New Taipei City, Taiwan, R.O.C.). The relative permeability is 2300 (permeability of free space: 4
π × 10
−7 H/m).
Figure 2c shows the equivalent circuit of the primary series resonant and secondary parallel resonant (SP) topology IPT system and
Figure 2d shows the secondary parallel resonant (P) topology IPT system, respectively.
The mutual inductance is
M (=
Lm) and the equivalent resistance of core loss is
Rm. The primary and secondary leakage inductances are
Llp and
Lls as in (2).
The primary and secondary resistances are
rp and
rs. The load is simplified as
RL. The primary series resonant capacitor is
CP and the secondary parallel resonant capacitor is
Cs. The transfer function of the SP topology IPT system is given as in (3):
The pole (s = −
PH) operated at the high frequency domain is as in (4):
The complex-conjugate poles operated at the low frequency domain are as in (5):
where the damping ratio is
, natural undamped frequency is
and resonant frequency is
, respectively.
The complex-conjugate poles operated at the middle frequency domain are as in (6):
where the damping ratio is
, natural undamped frequency is
and resonant frequency is
, respectively.
According to (3), the transfer function of the IPT system with P topology is reduced as in (7):
The high frequency pole (s = −
PH) is as in (4) and the low frequency pole (s = −
PL) is as in (8):
The complex-conjugate poles operated at the middle frequency domain are as in (9):
where the damping ratio is
, natural undamped frequency is
and resonant frequency is
, respectively.
According to (3) and (7), there are two pairs of resonant poles in the SP topology IPT system and one pair of resonant poles in the P topology IPT system.
3. Frequency Response of the IPT System
The parameters of the IPT system are as follows: the primary inductance and secondary inductance are Lp (325 μH) and Ls (325 μH). The primary series resonant capacitor is CP (0.2 μF) and the secondary parallel resonant capacitor is Cs (0.2 μF). The resistances rp and rs are 0.72 Ω. The load resistance RL is 100 Ω.
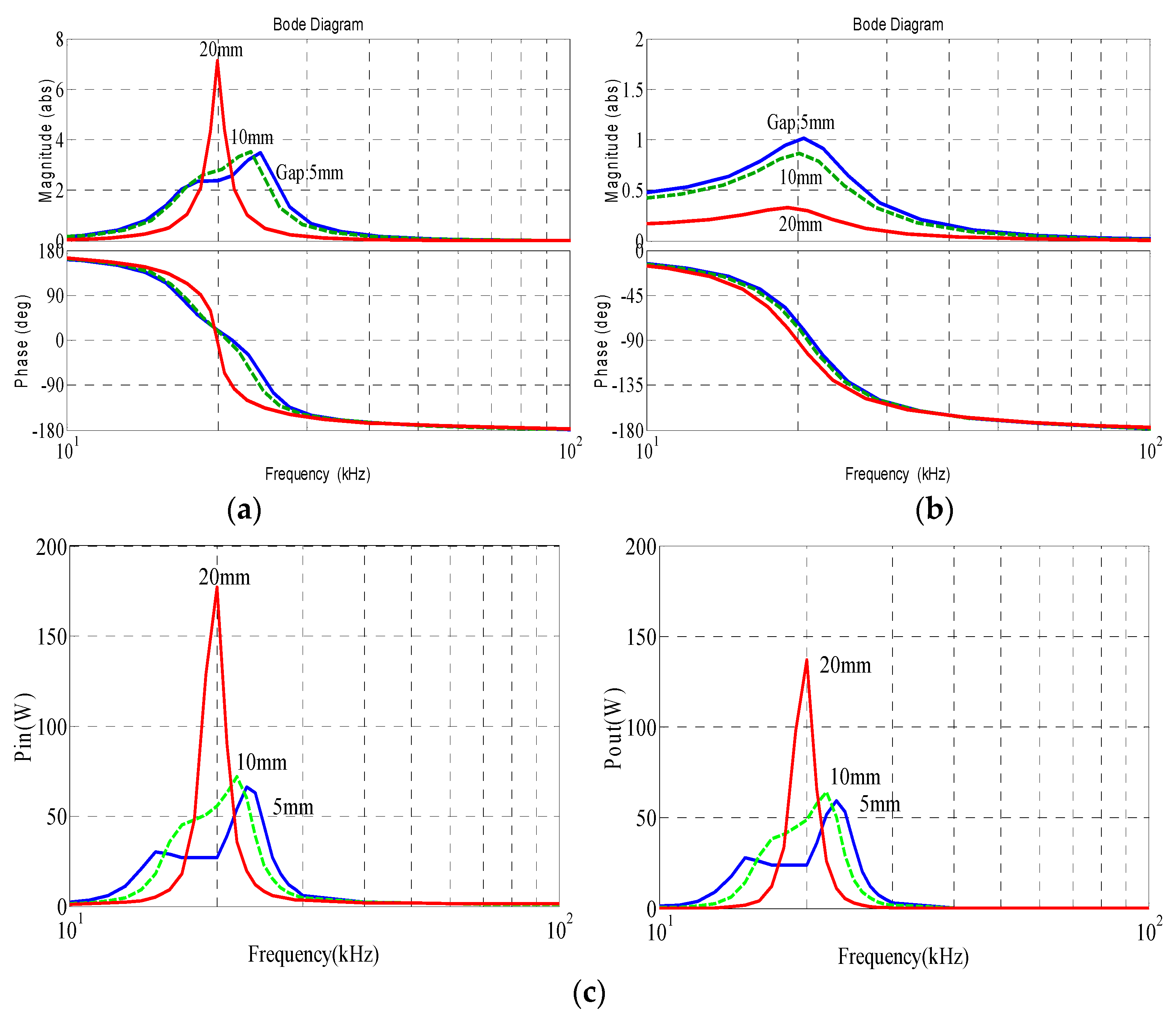
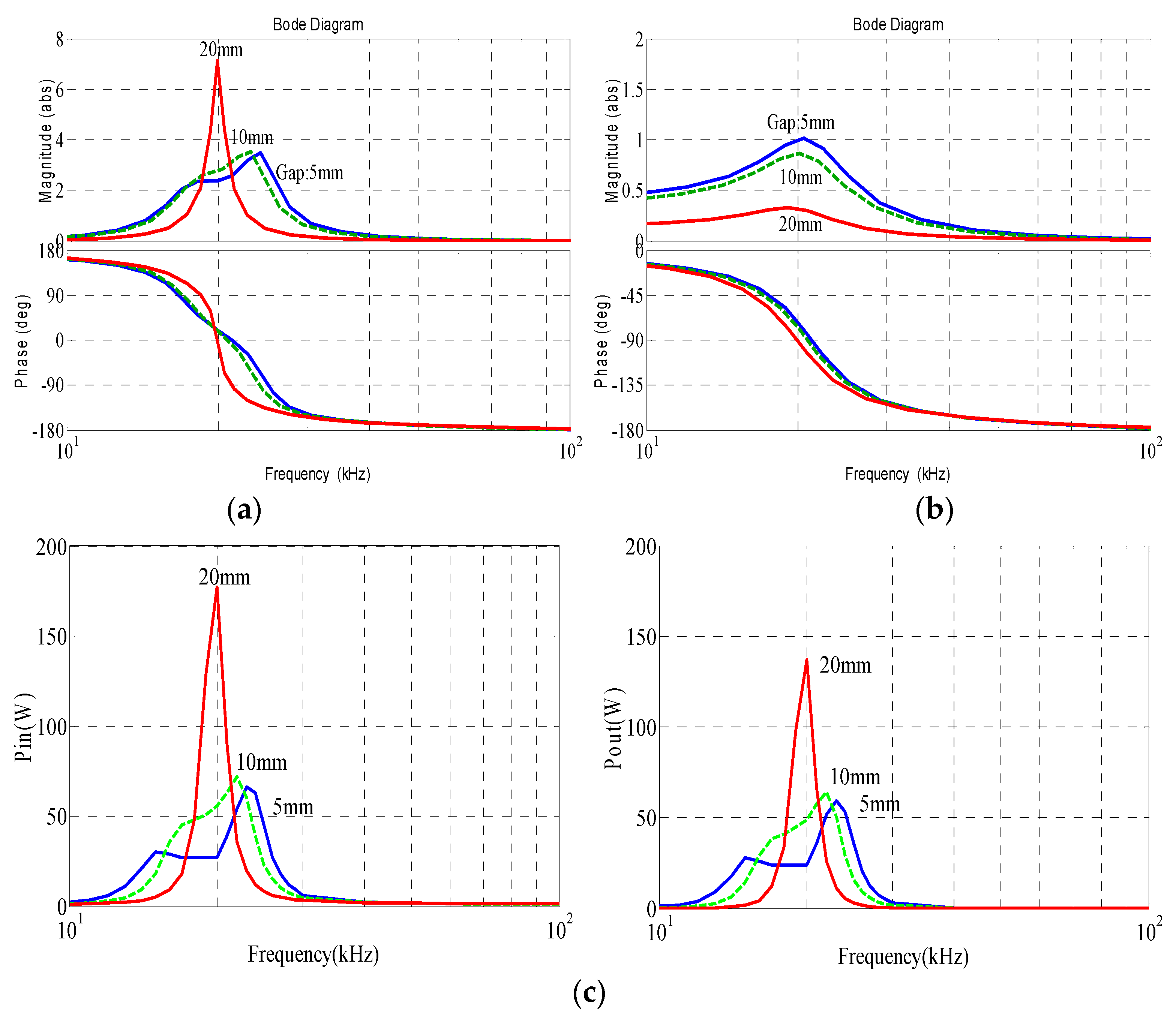
Figure 3 shows the frequency response of the IPT system based on EE-shaped cores with varied air gap (fsw: 10–100 kHz). In SP topology, the resonant frequencies
ωr1 and
ωr2 move to each other as the air gap is increased as shown in
Figure 3a. In P topology, the resonant peak value is decreased as the air gap is increased as shown in
Figure 3b. Therefore, the SP topology is suitable for a large air gap IPT system and the P topology suits a small air gap IPT system. The coupling coefficient and resonant frequency of the IPT system with varied air gap are given in
Table 1.
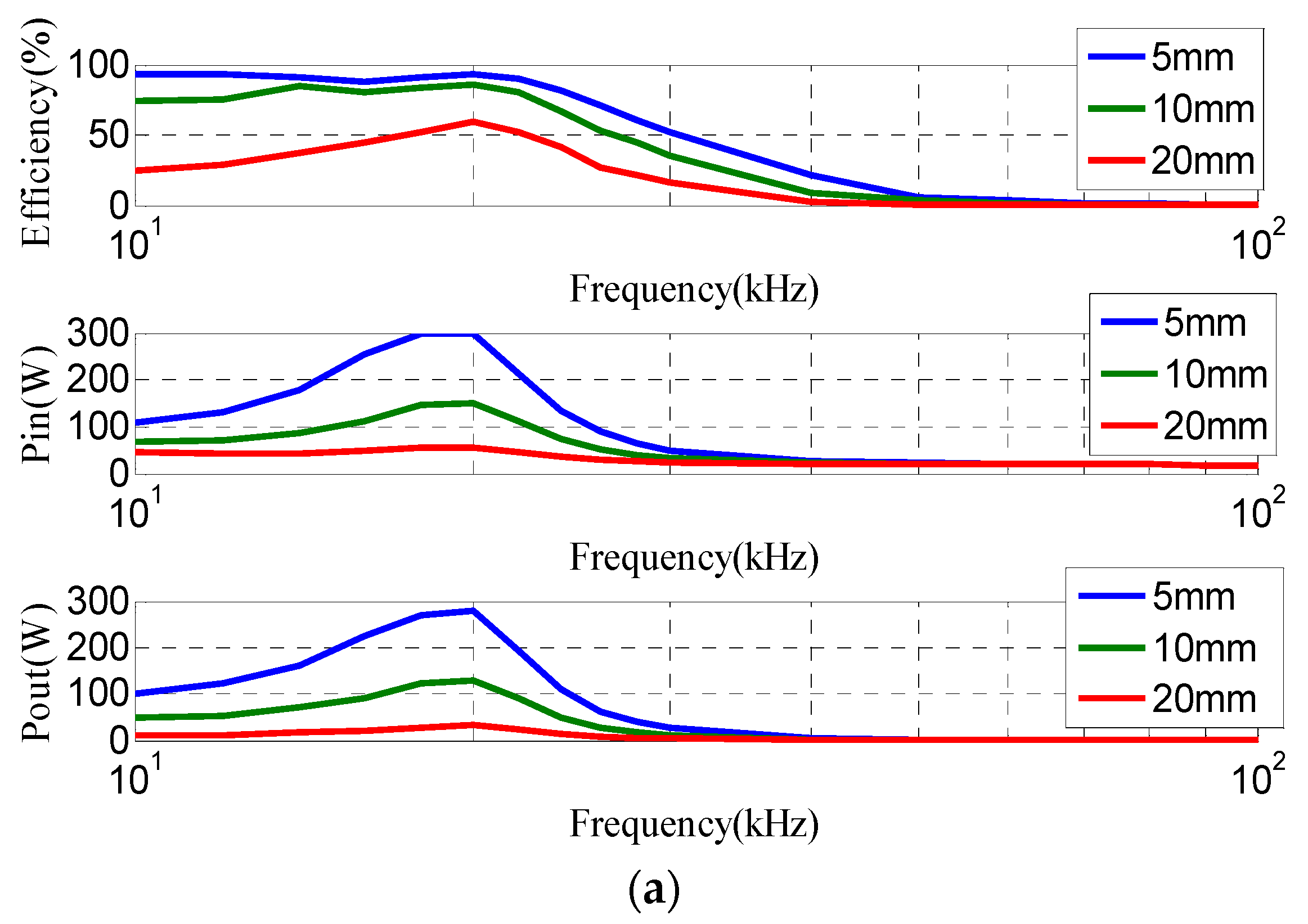
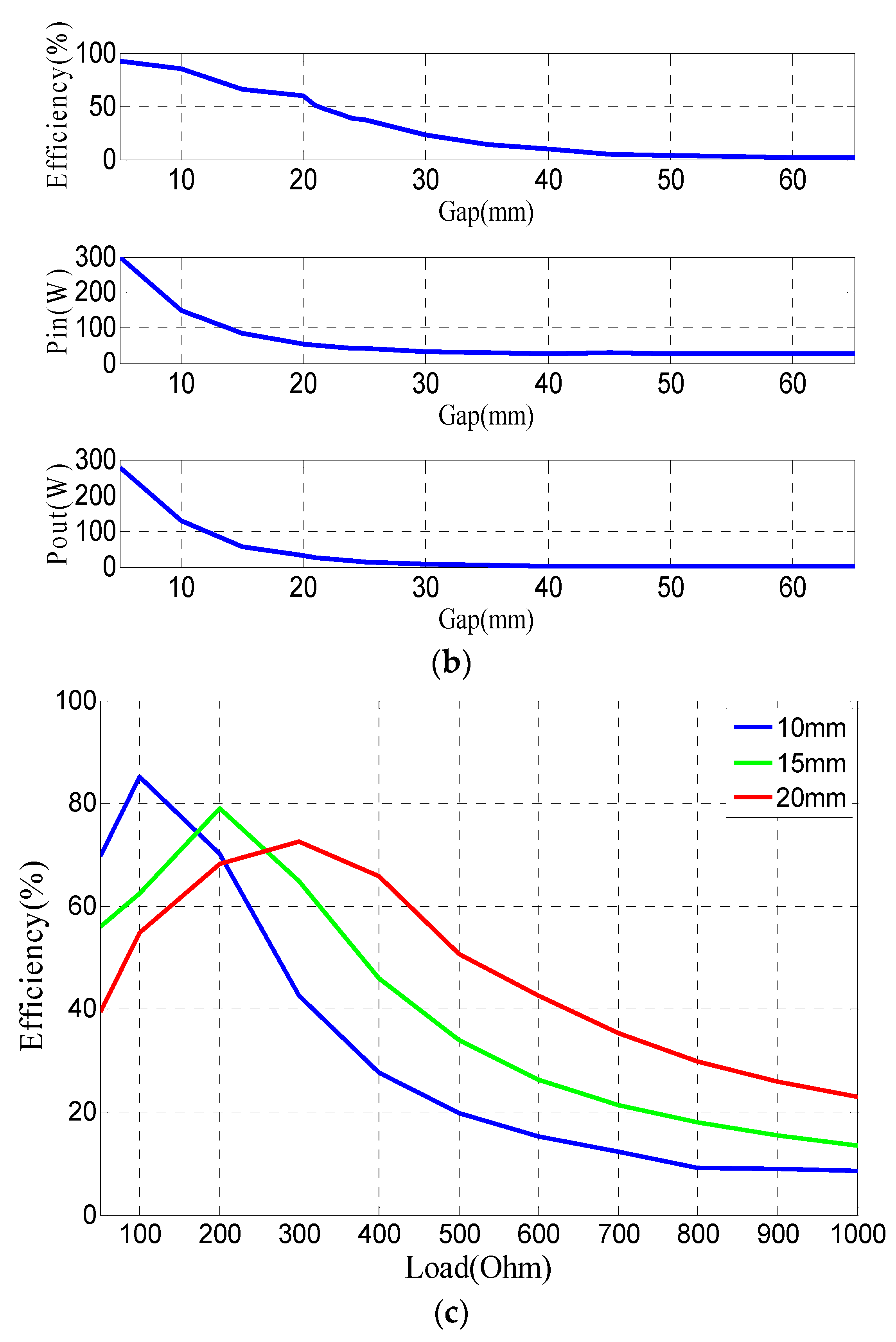
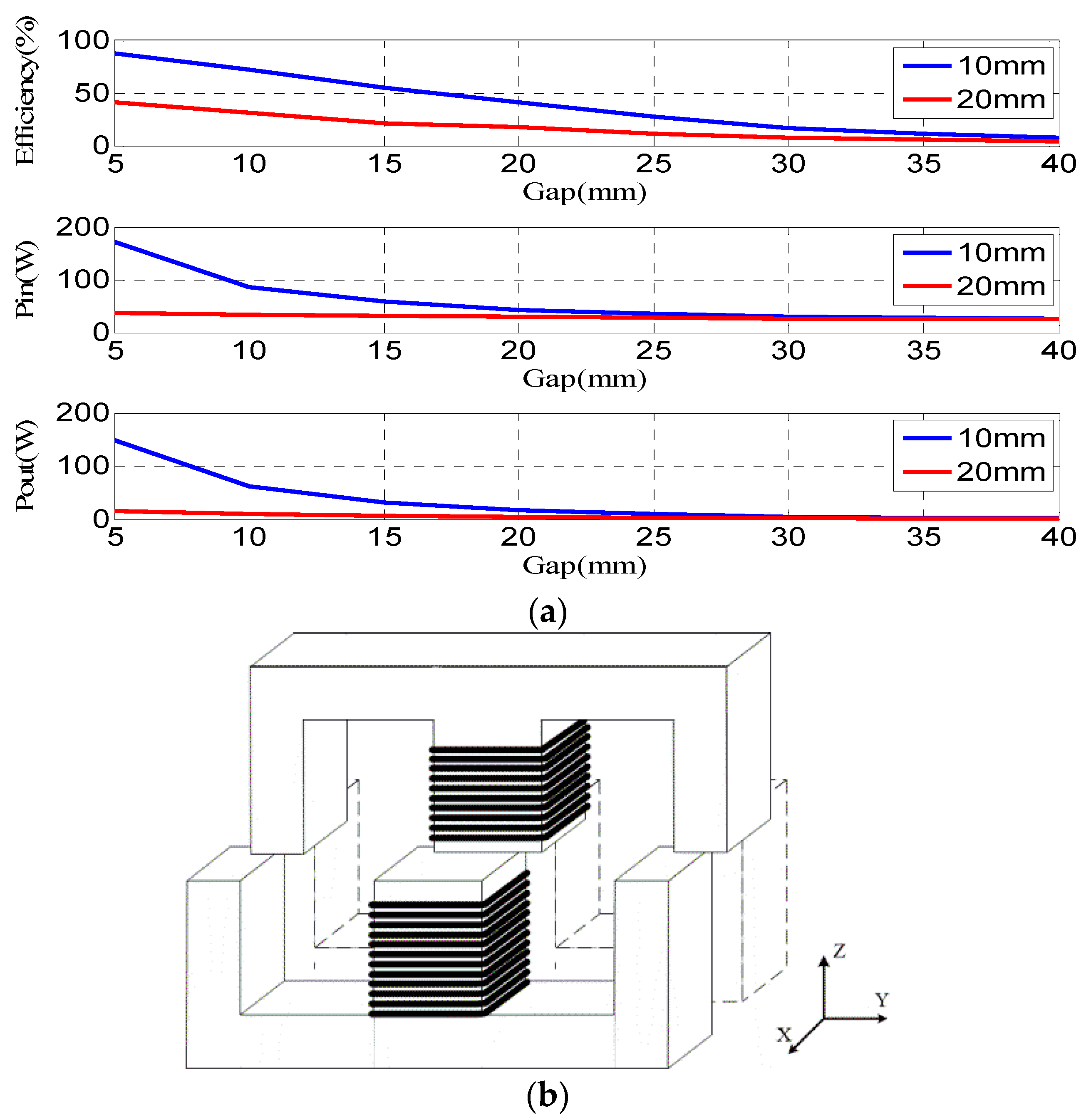
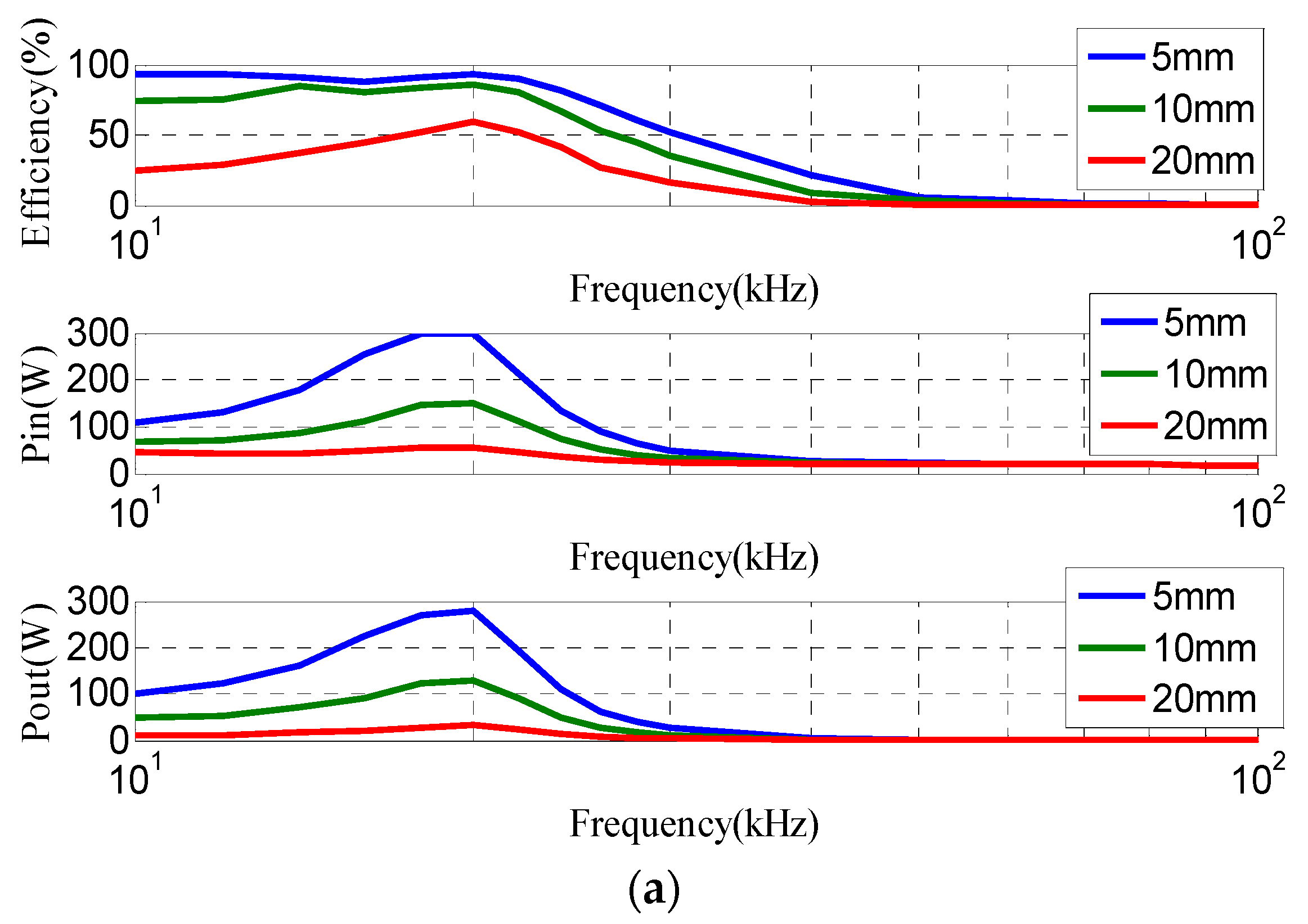
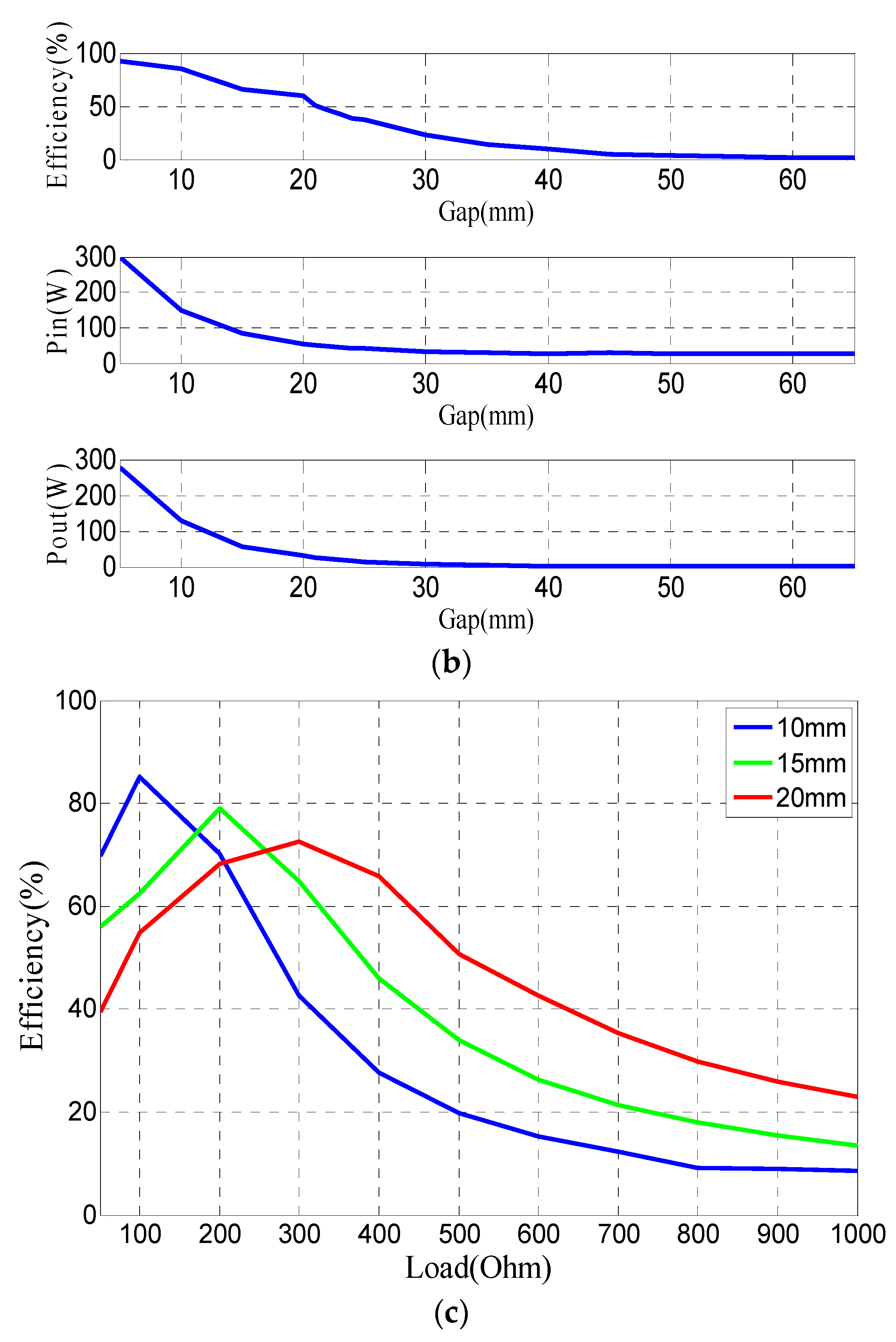
Figure 3c shows the input power and output power of the SP topology IPT system with varied air gap (test results; V
dc: 30 V). The resonant frequencies of the IPT system are 15 kHz (
ωr1) and 23 kHz (
ωr2) under air gap 5 mm, 17 kHz (
ωr1) and 22 kHz (
ωr2) under air gap 10 mm, and 20 kHz (
ωr1,2) under air gap 20 mm, respectively. The input power and output power are increased and the efficiency is decreased as air gap increased. The measurement results of the SP topology IPT system are given in
Table 2.
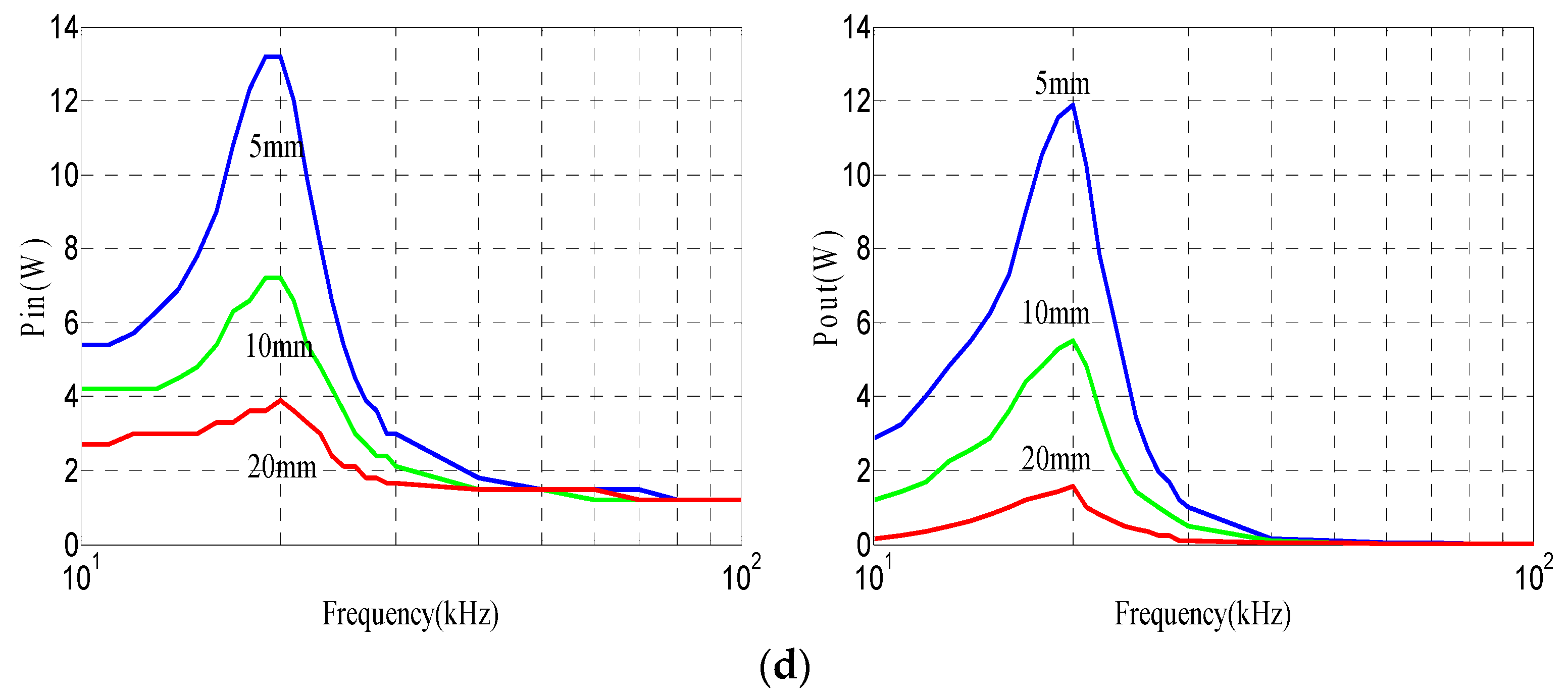
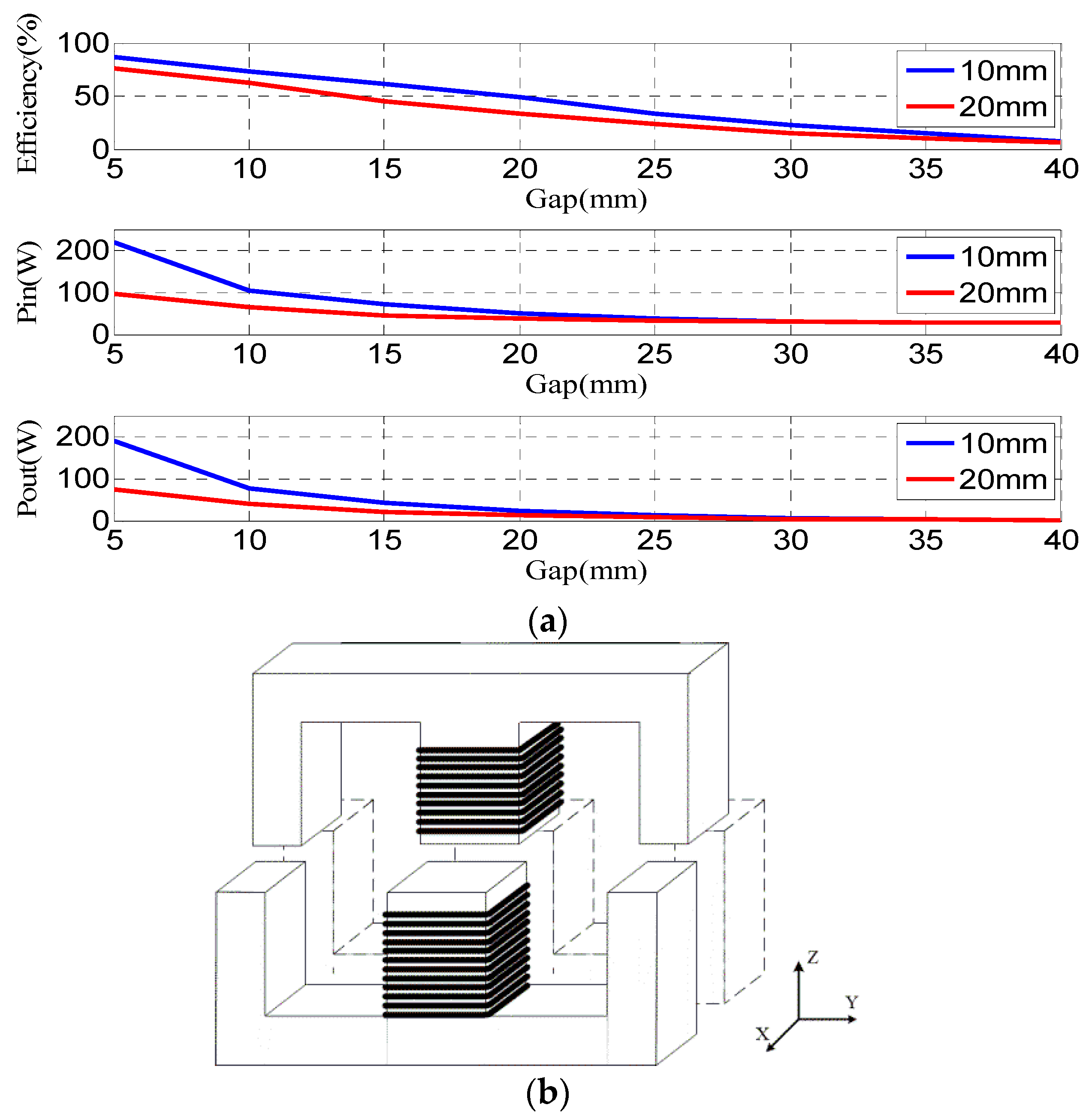
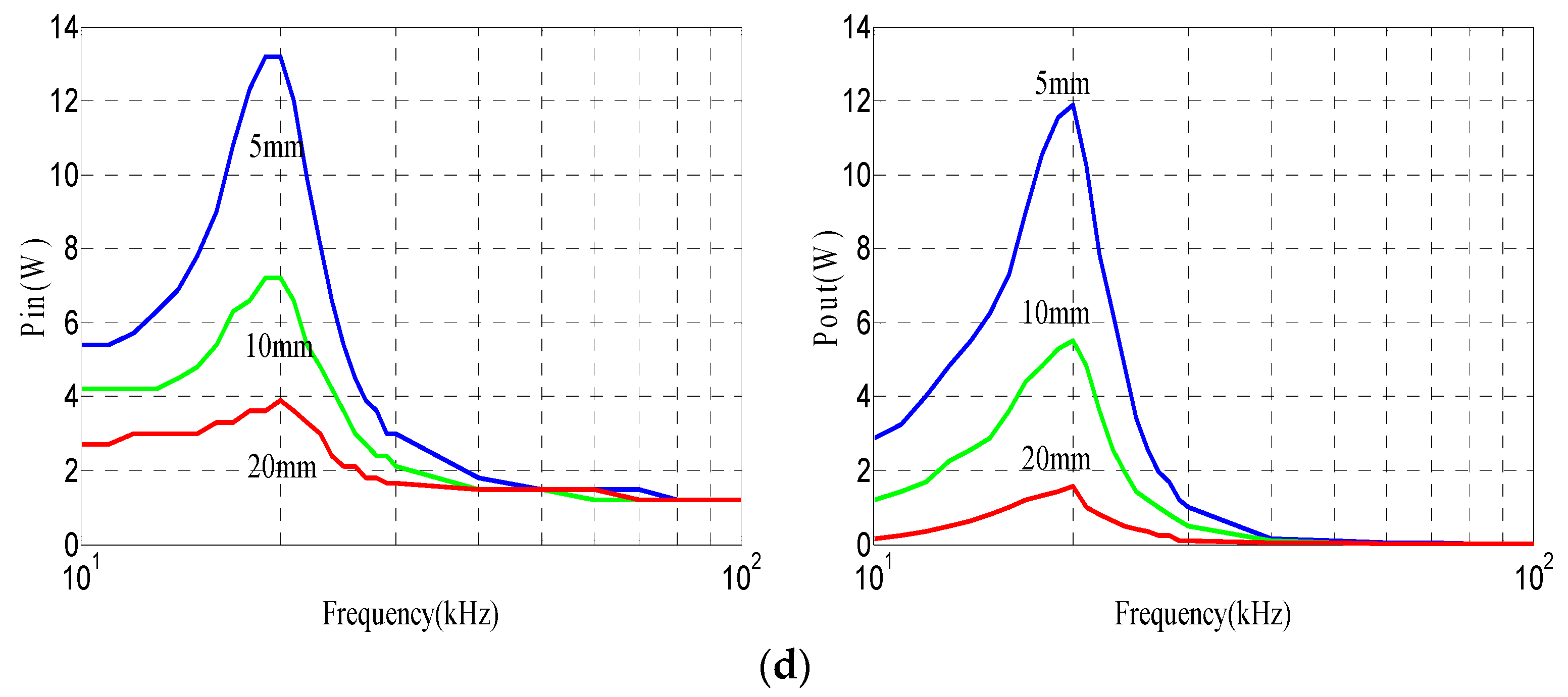
Figure 3d shows the input power and output power of the P topology IPT system with varied air gap (test results; V
dc: 30 V). The input power, output power, and the efficiency are decreased as air gap increased. The measurement results of the P topology IPT system are given in
Table 2. As shown in
Figure 3, the measurement results agree with the simulation results produced by using MATLAB.
5. IPT System Operated at Large Air Gap
The IPT system operated at large air gap is restricted by the EE-shaped ferrite cores used. Therefore, finite element analysis (FEA) software is utilized to validate the performances of the proposed scheme.
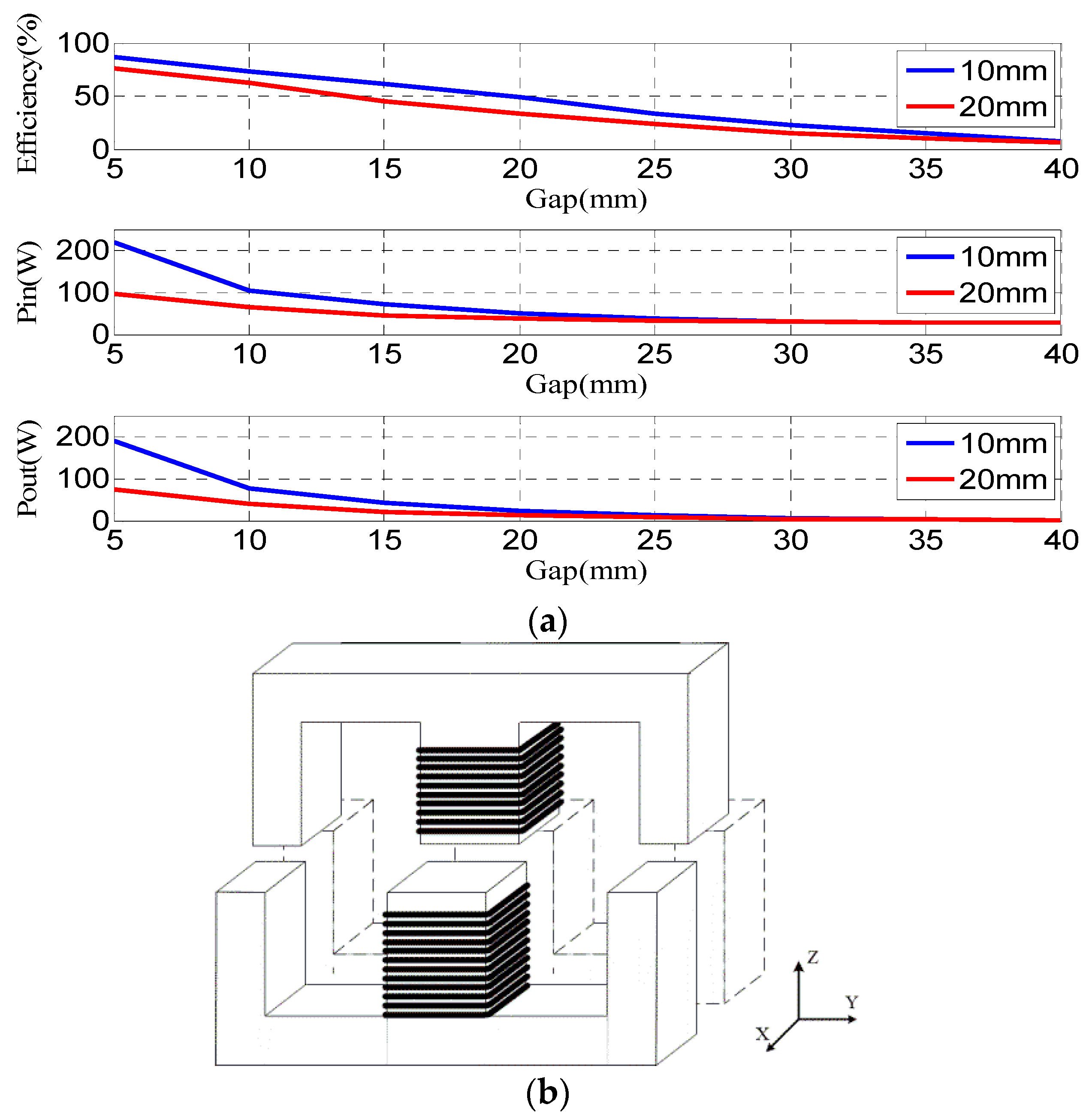
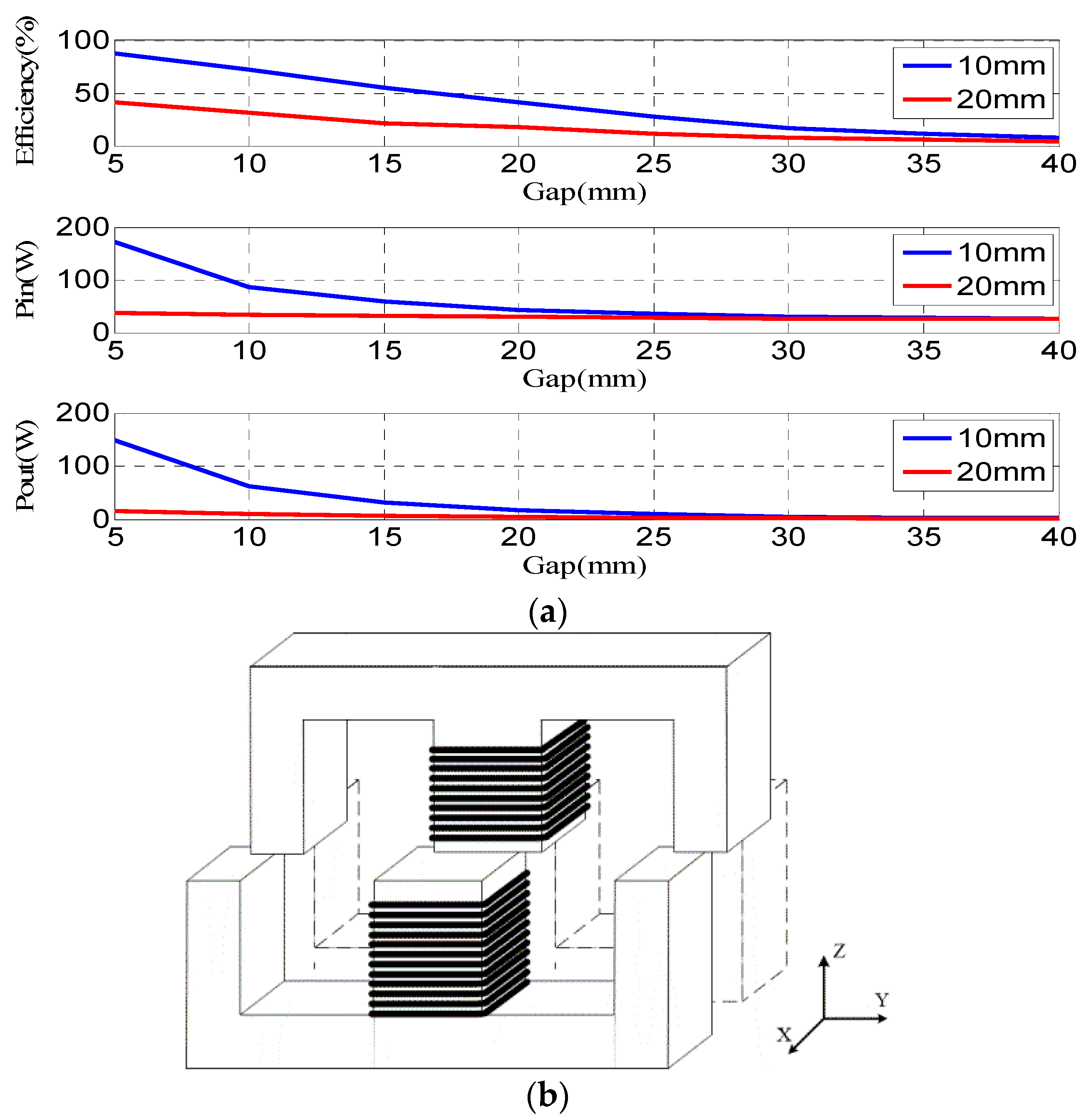
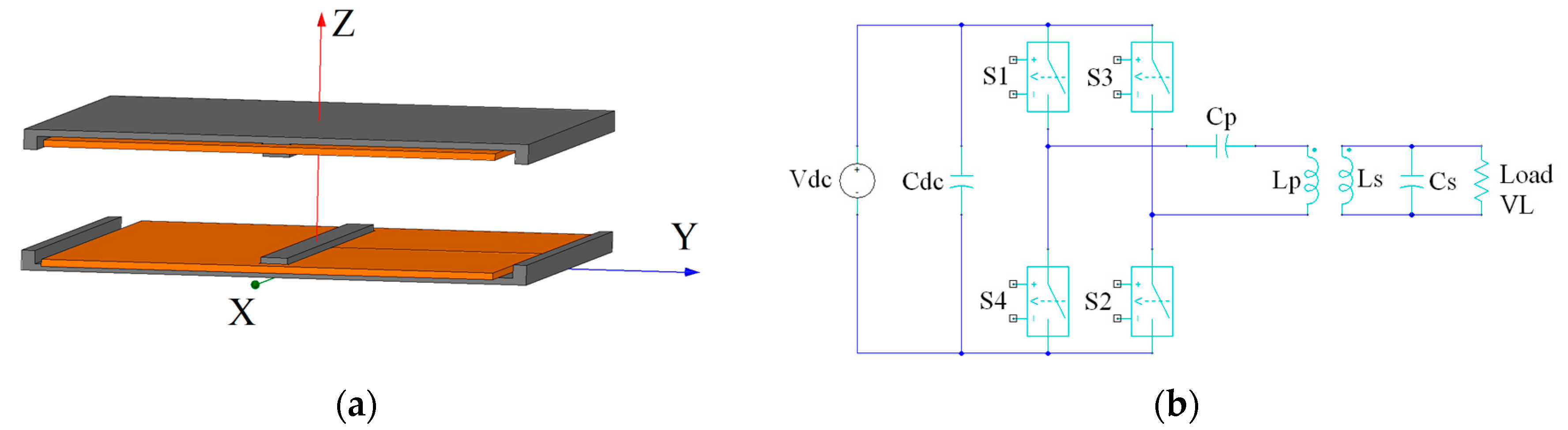
Figure 11 shows the IPT system based on the FEA software. According to
Figure 2b, and
Figure 11a which shows the 3D model of the EE-shaped ferrite cores, the dimensions are A (760 mm), B (30 mm), C (760 mm), D (20 mm), E (720 mm), F (40 mm), G (F/2), H (E/2–F/2), and I (A/4–E/4). The air gap between the EE-shaped cores is 150 mm. The material of the EE-shaped cores is 3C90 made by Ferroxcube.
Figure 11b shows the circuit of the SP topology based on the FEA software. The primary and secondary excitation windings are 11 turns and 11 turns, respectively. The primary and secondary inductances are
Lp (147 μH) and
Ls (147 μH). The primary series capacitor and secondary parallel capacitor are
Cp (0.43 μF) and
Cs (0.43 μF). Therefore, the resonant frequency is designed as 20 kHz.
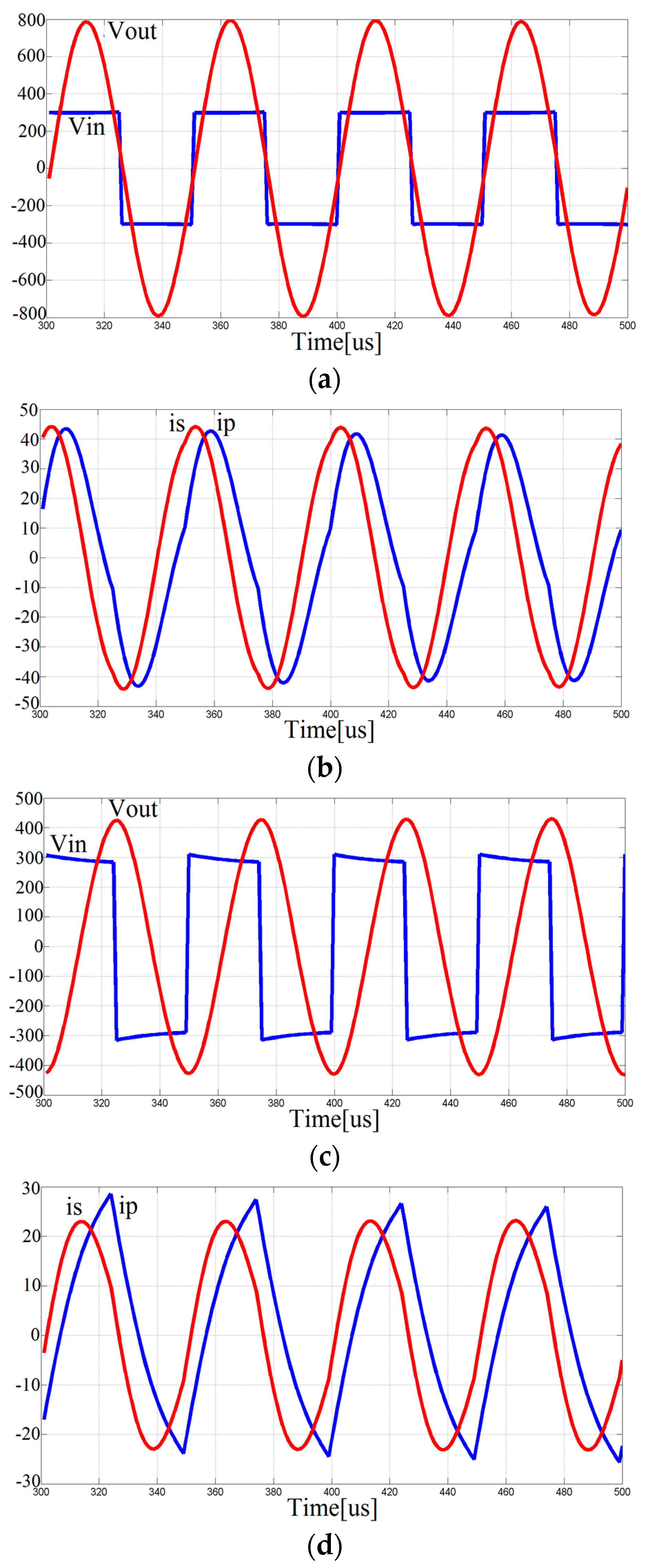
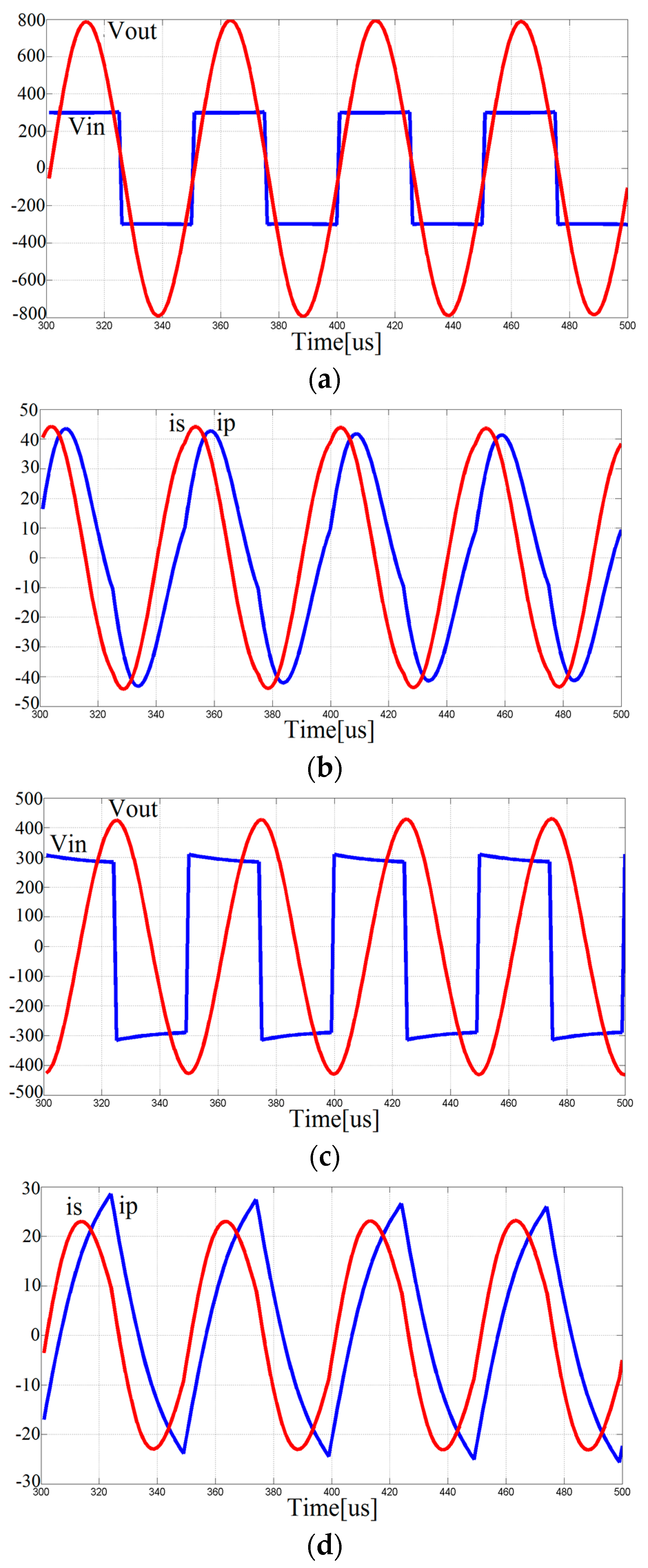
Figure 12a,b show the waveforms of the SP topology IPT system based on FEA. As shown in
Figure 12a, the input voltage is a square wave with amplitude 300 V and the output voltage is a sinusoidal wave with amplitude 793 V. The amplitudes of the input current and output current are 41 A and 43 A as shown in
Figure 12b. The efficiency, input power, and output power of the SP topology IPT system are 80%, 3930 W, and 3136 W, respectively.
Figure 12c,d show the waveforms of the P topology IPT system based on FEA. As shown in
Figure 12c, the input voltage is a square wave with amplitude 300 V and the output voltage is a sinusoidal wave with amplitude 432 V. The amplitudes of the input current and output current are 25.5 A and 23 A as shown in
Figure 12d. The efficiency, input power, and output power of the P topology IPT system are 59.8%, 1560 W, and 934 W, respectively. Comparing the SP topology (
Figure 12a,b) with the P topology (
Figure 12c,d), the IPT system adopting a SP topology exhibits superior performances under large (150 mm) air gap conditions.
6. Conclusions
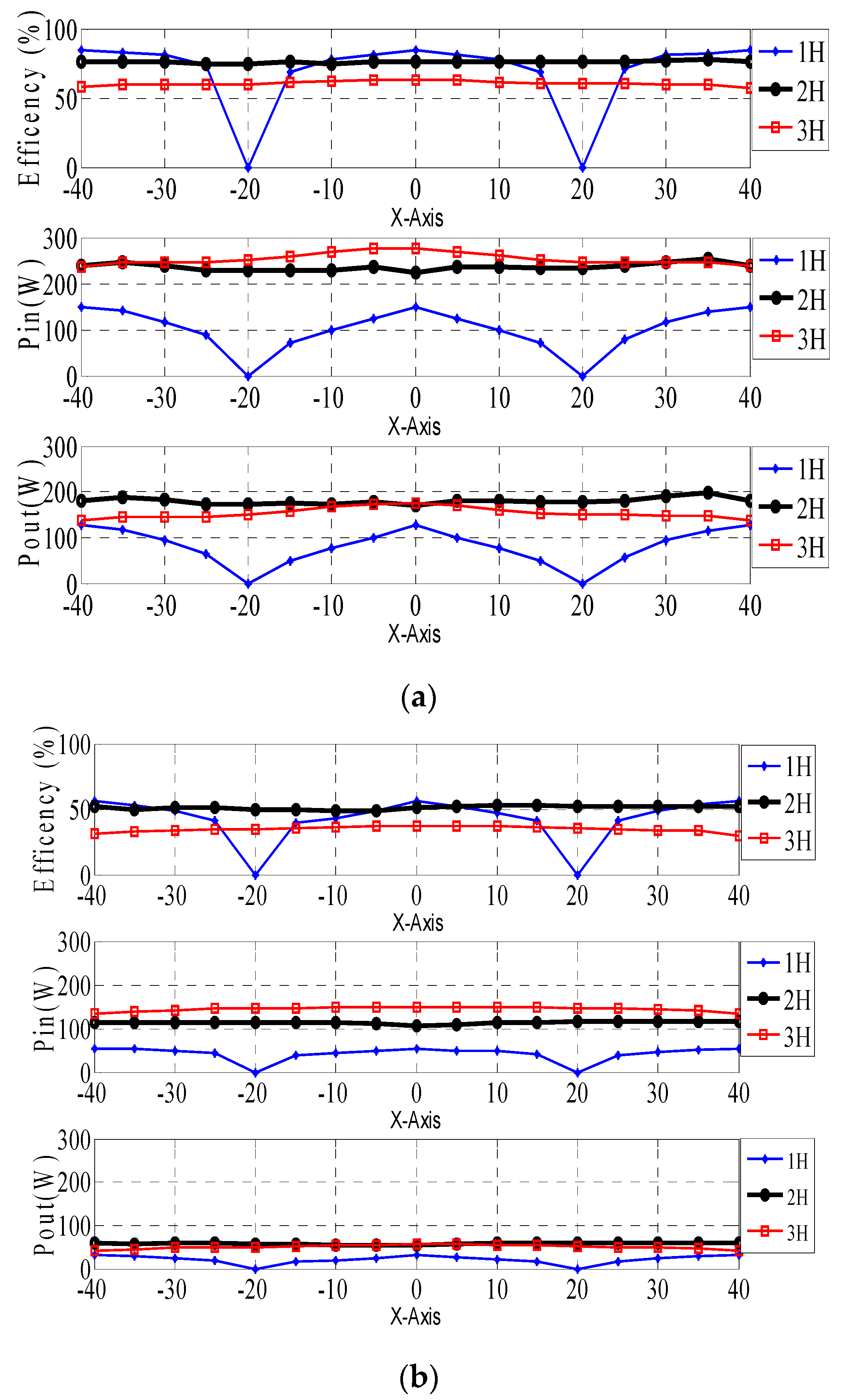
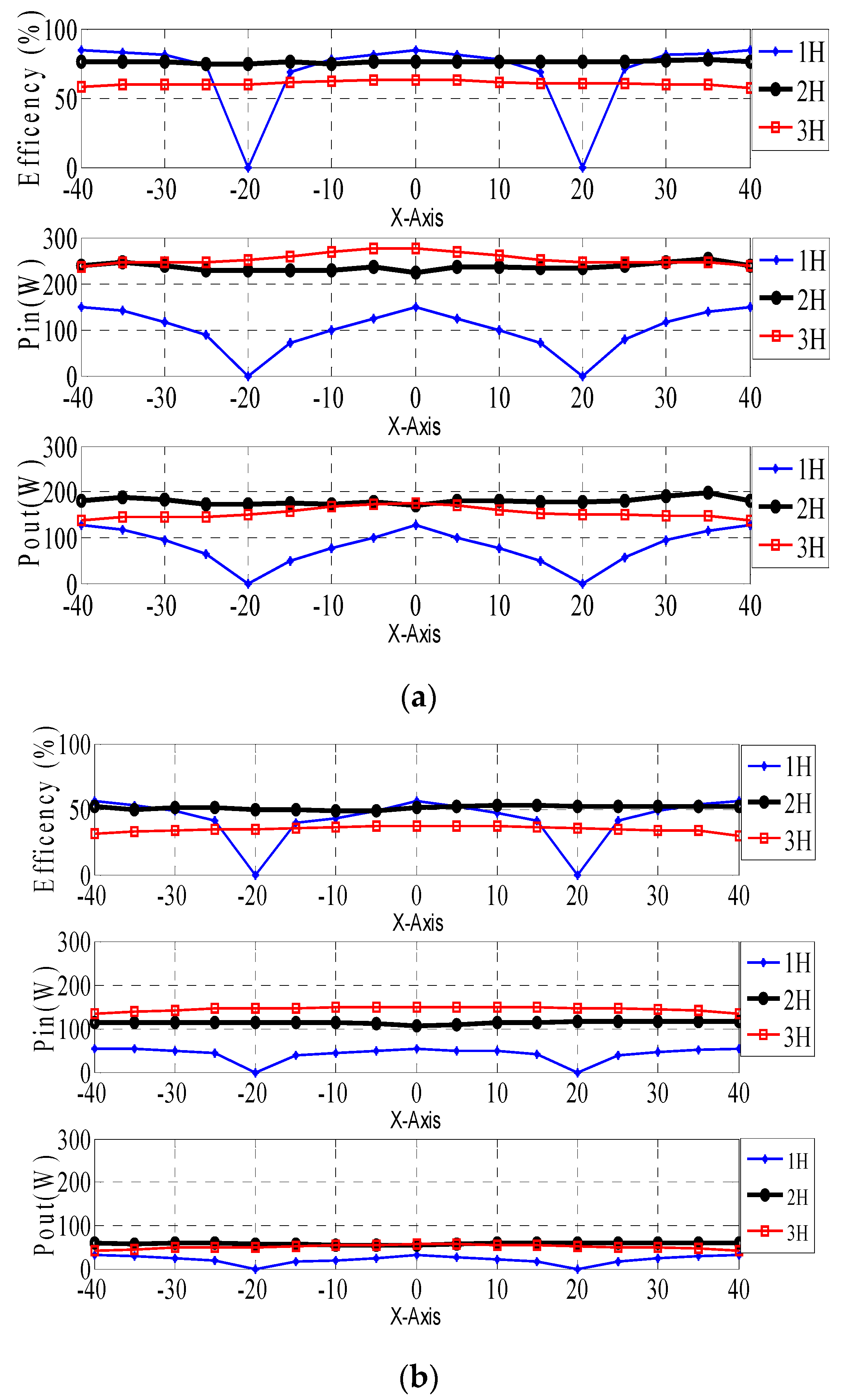
This study discusses the IPT system based on EE-shaped ferrite cores. The transfer function and frequency response of the SP topology and P topology IPT systems are presented. The SP topology is suitable for large air gaps and the P topology is suitable for small air gaps. The issues of the IPT system such as efficiency, air gap, displacement, dislocation, and motion are discussed. Finite element analysis is utilized to validate the SP topology IPT system operated under large air gap conditions. Furthermore, multi-H-bridge inverters are utilized to increase the transfer power of the IPT system. The three operation modes (1H, 2H, and 3H) of three H-bridge inverters are controlled by position regulation sensors. Among mode 1H, 2H, and 3H, mode 2H exhibits superior performance in the IPT system and meets the requirements for bus-stop-powered EVs.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}