
Comparison of Moving Boundary and Finite-Volume Heat Exchanger Models in the Modelica Language †

 ,
, 
Abstract
:1. Introduction
2. Heat Exchanger Modeling
2.1. Assumptions
- The working fluid flow through a control volume of the heat exchanger is described with a mathematical formulation of the conservation laws of physics. Energy and mass balances are expressed considering the dynamic contribution. Given the low time constant characterizing the propagation of pressure throughout the heat exchanger compared to those related to mass and thermal energy transfer, a static momentum balance is assumed.
- The heat exchanger is considered as a one-dimensional tube (z-direction) in the flow direction.
- Kinetic energy, gravitational forces and viscous stresses are neglected.
- No work is done on or generated by the fluid in the control volume.
- The cross-section area is assumed constant throughout the heat exchanger length.
- The velocity of the fluid is uniform over the cross-section area (homogeneous two-phase flow).
- Pressure drops through the heat exchanger are neglected (homogeneous pressure).
- Axial heat conduction is neglected in the fluid element.
- The rate of thermal energy addition by radiation is neglected in the fluid element.
- The rate of thermal energy exchanged with the ambient environment by convection is considered in the fluid element.
- Thermal energy accumulation is considered for the metal wall of the tube.
- Thermal energy conduction in the metal wall is neglected in the flow direction and considered static and infinite in the circumferential direction (the wall cross-section area has a uniform temperature).
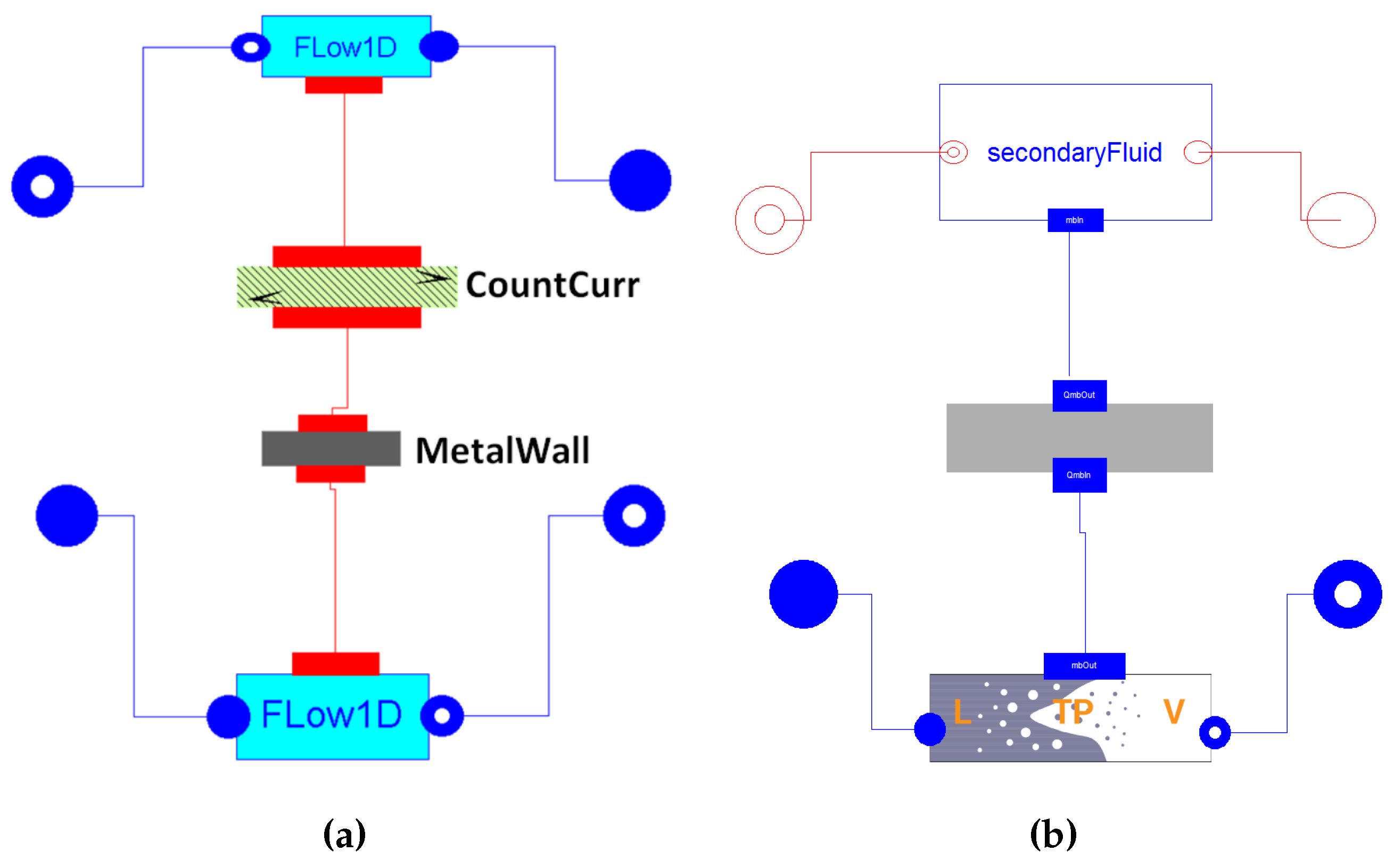
2.2. Finite Volume Model
2.3. Moving Boundary Model
3. Model Integrity
4. Validation
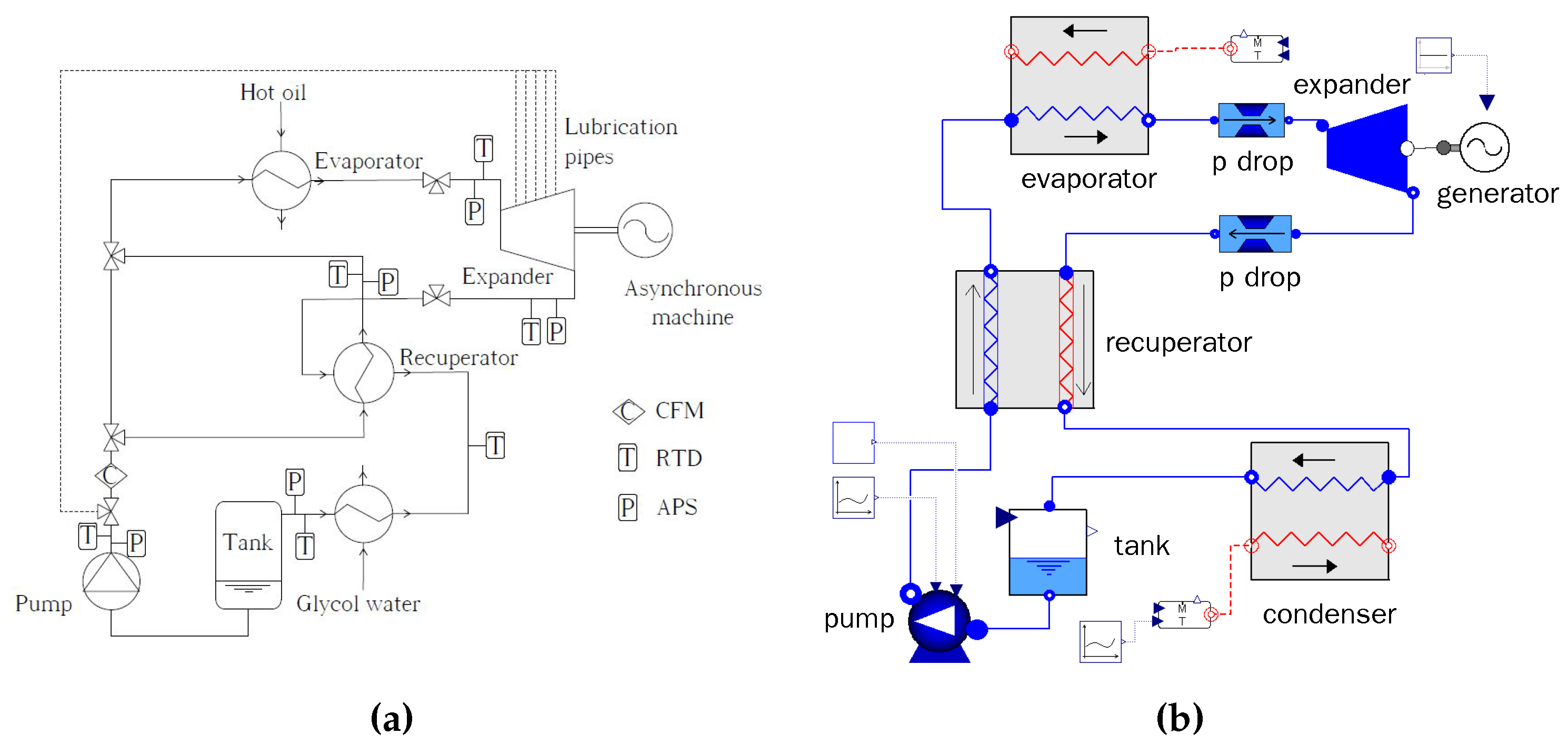
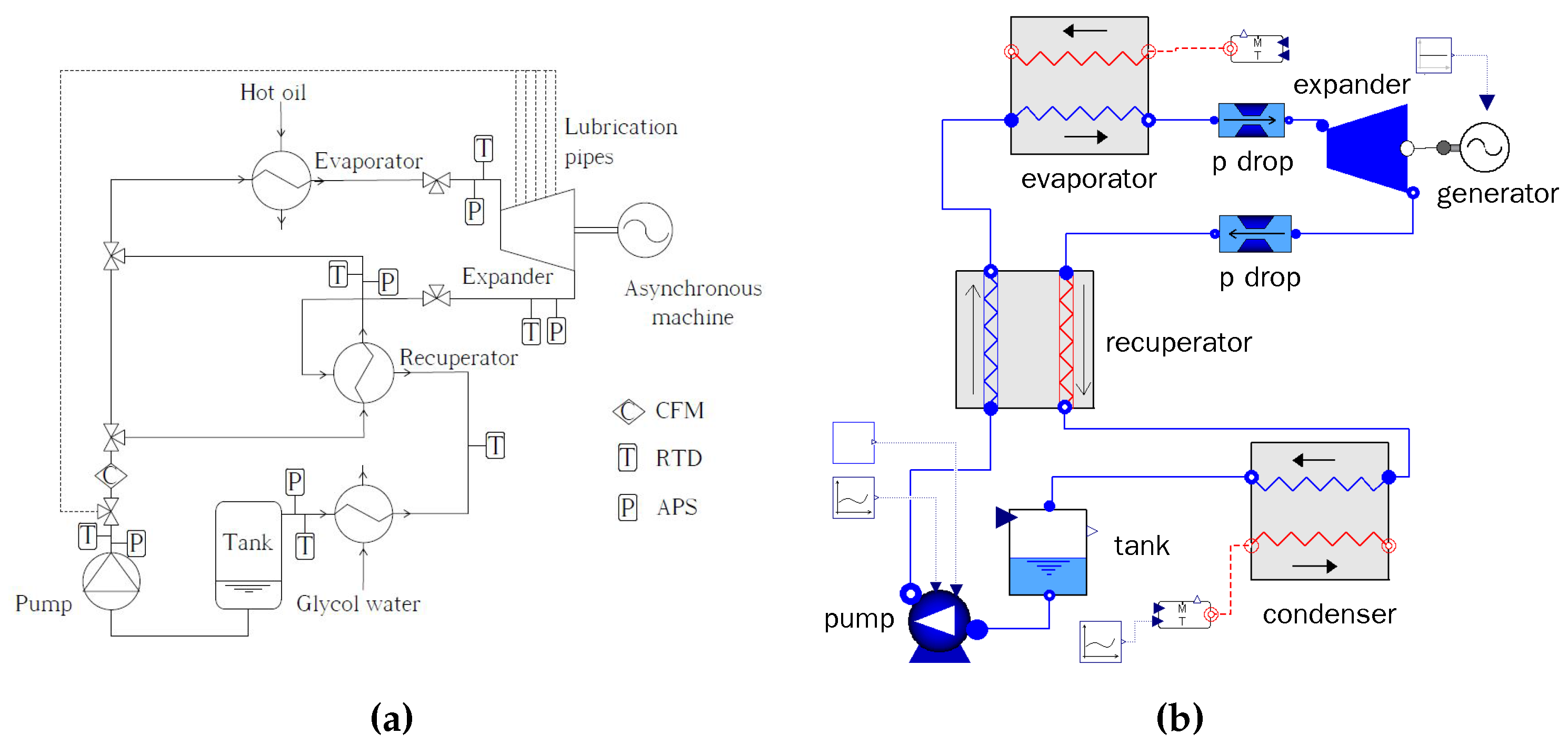
4.1. ORC Test Rig Facility
4.2. ORC System Modelica Model
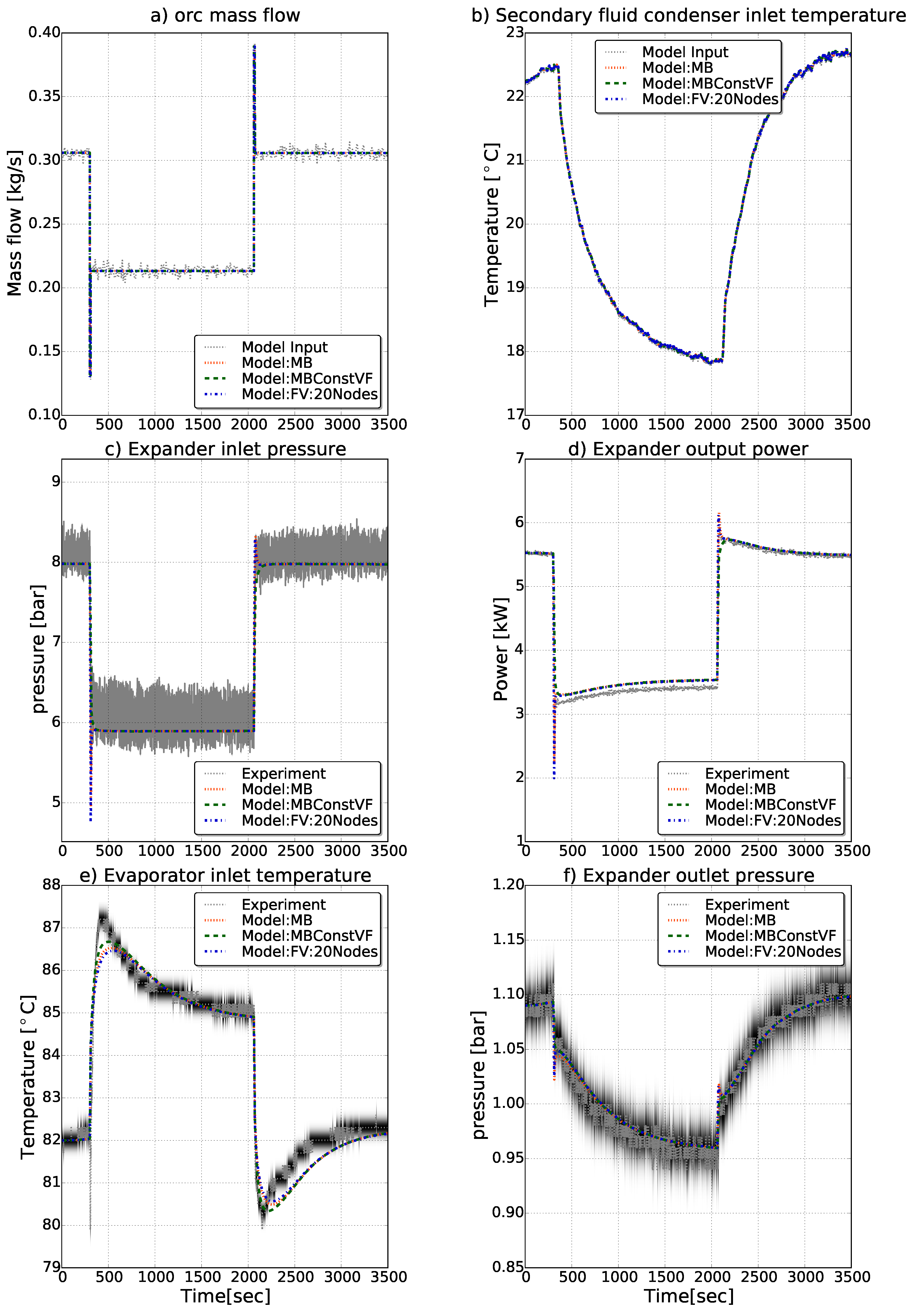
4.3. Model Validation
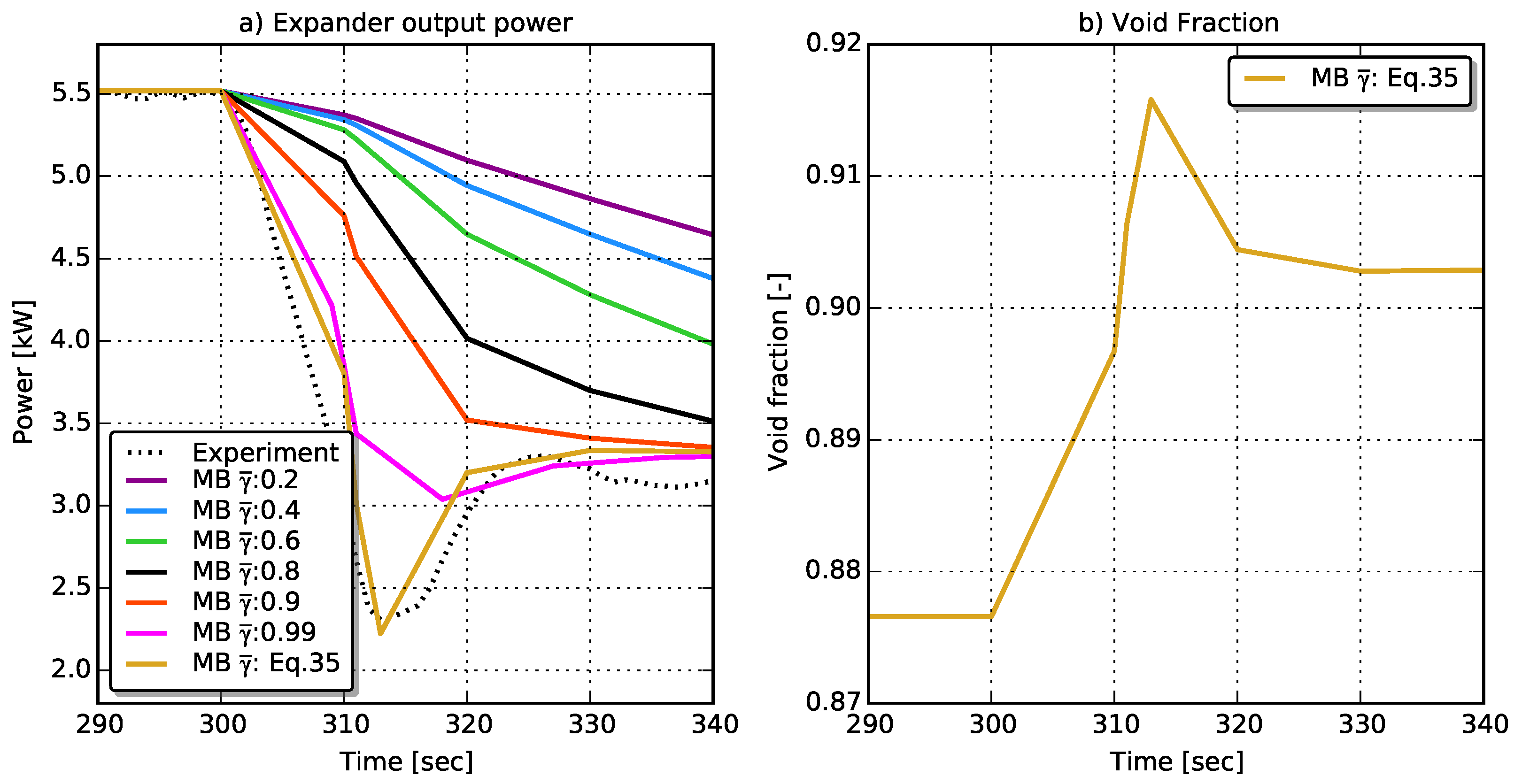
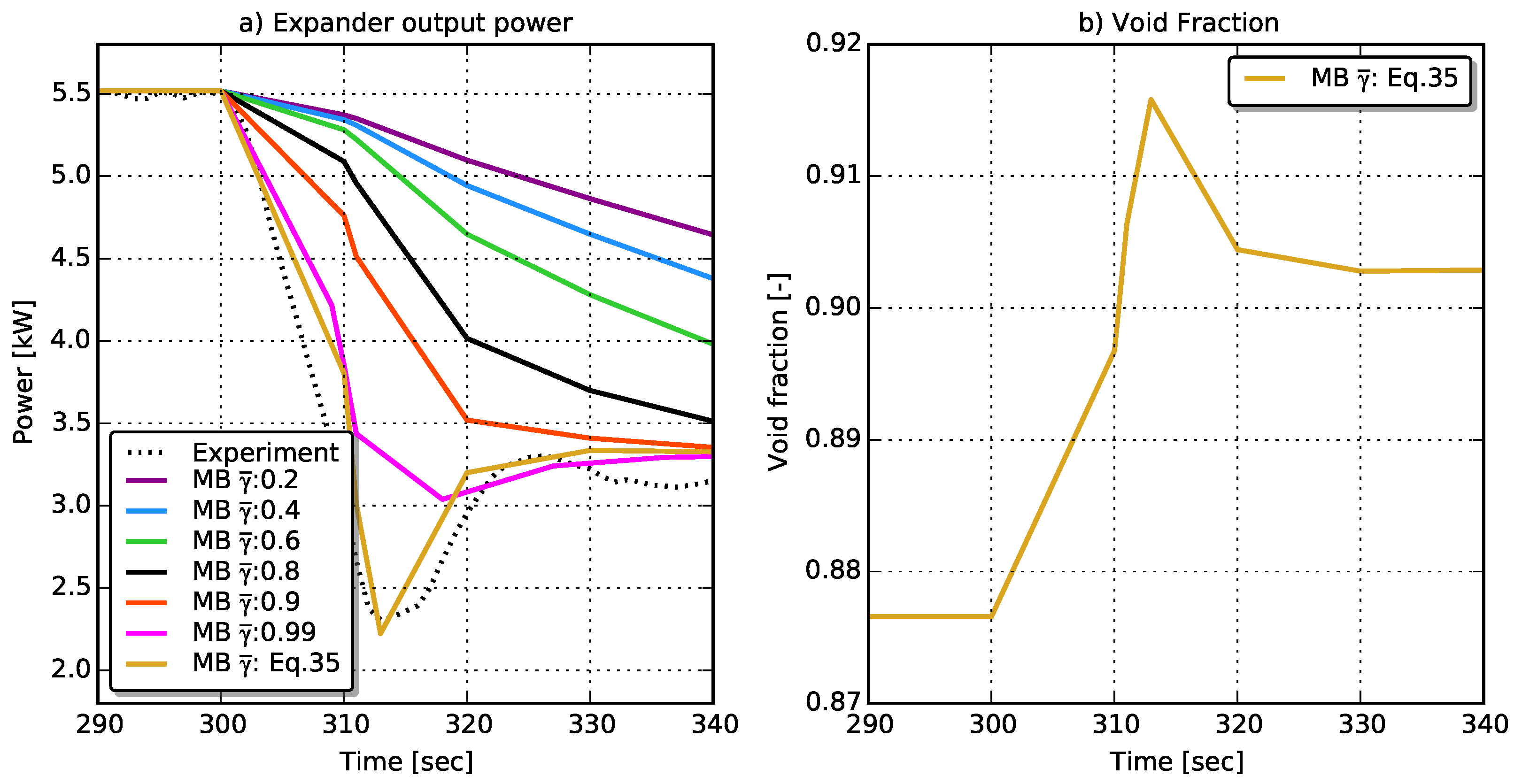
4.4. Moving Boundary: Mean Void Fraction Parametric Analysis
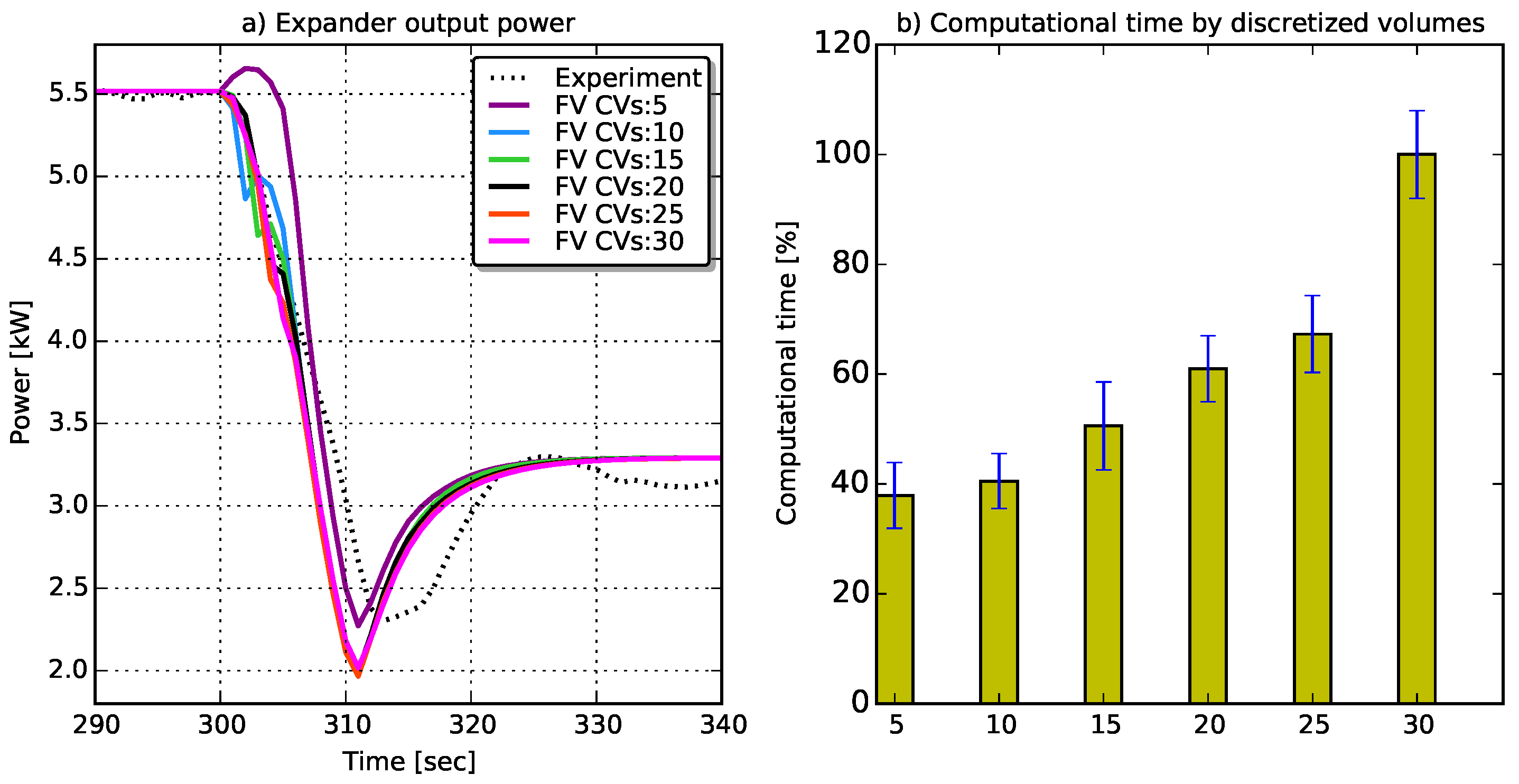
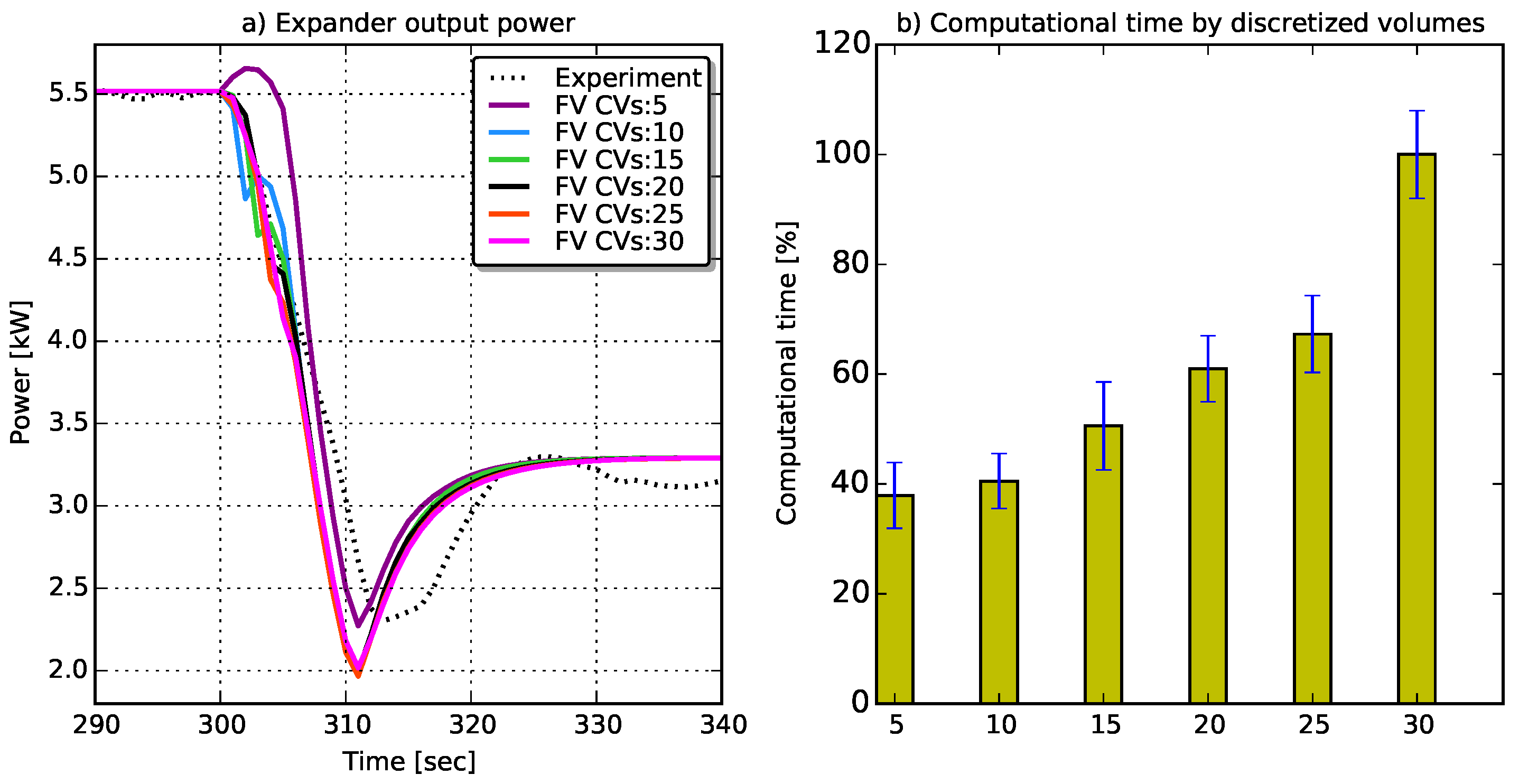
4.5. Finite Volume: Number of CVs Parametric Analysis
5. Conclusions
- The integrity test results allow one to conclude that both the MB and FV approaches are well suited for dynamic modeling of two-phase heat exchanger components being characterized by a low error on the total conservation of energy and mass.
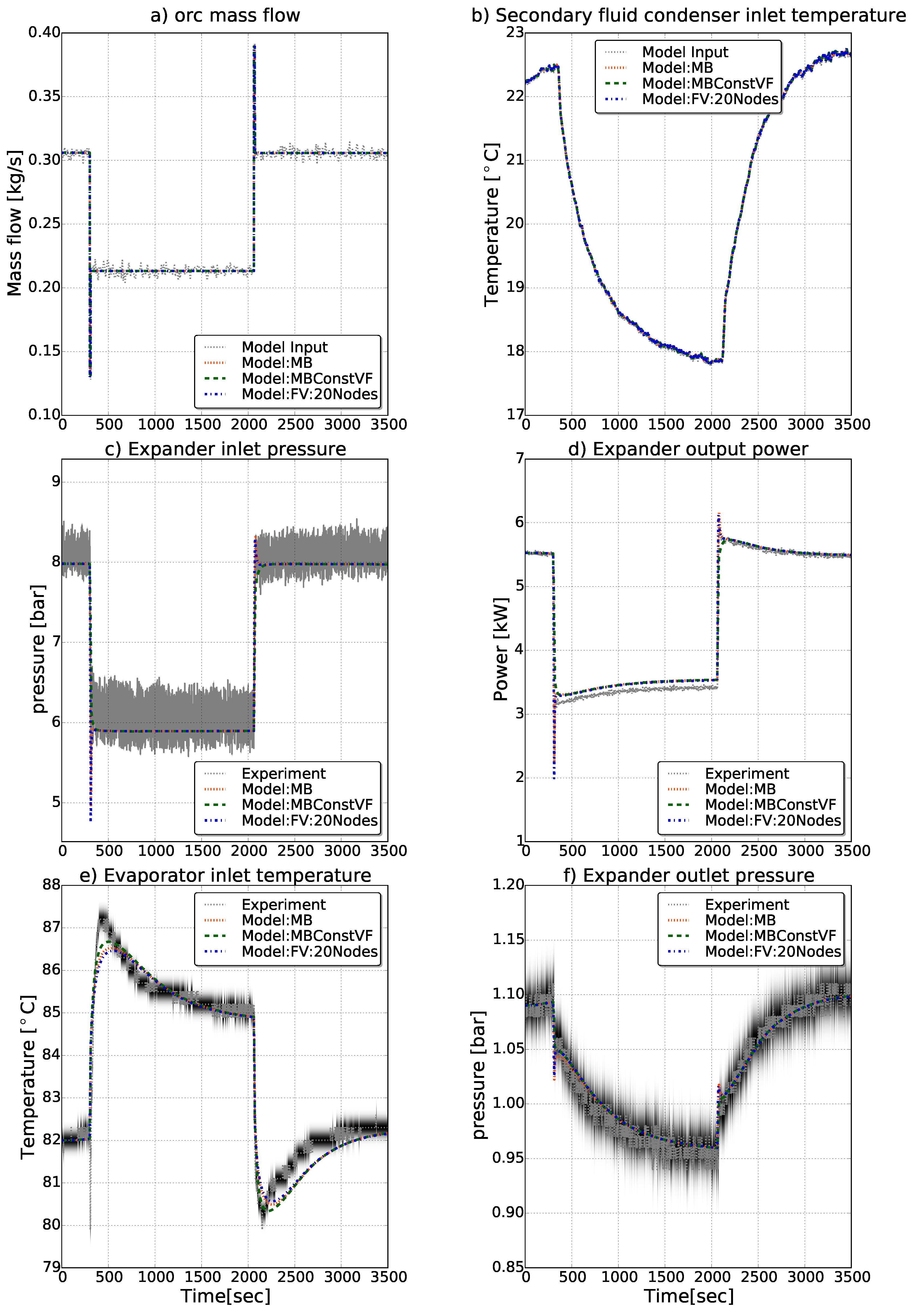
- The comparison against experimental transients of a small 11 kWel ORC power unit demonstrates that both the FV and the MB with an analytically calculated void fraction approaches are suitable for the dynamic modeling of the evaporator when integrated at the system level. The moving boundary model allows one to decrease significantly the simulation speed while keeping a good accuracy with the experimental data.
- In the proposed comparison, the assumption of homogeneous two-phase flow does not lead to inaccurate estimation of the time constant characterizing the system and can be considered appropriate for the modeling of a small capacity thermal power unit.
- Assuming a constant void fraction in the MB approach results in an overestimation of the dynamics (i.e., leading to slower response times), making it unsuitable for modeling a small capacity heat exchanger. From the proposed parametric analysis, it is clear that the average void fraction is inversely proportional to the time constant characterizing the evaporator model.
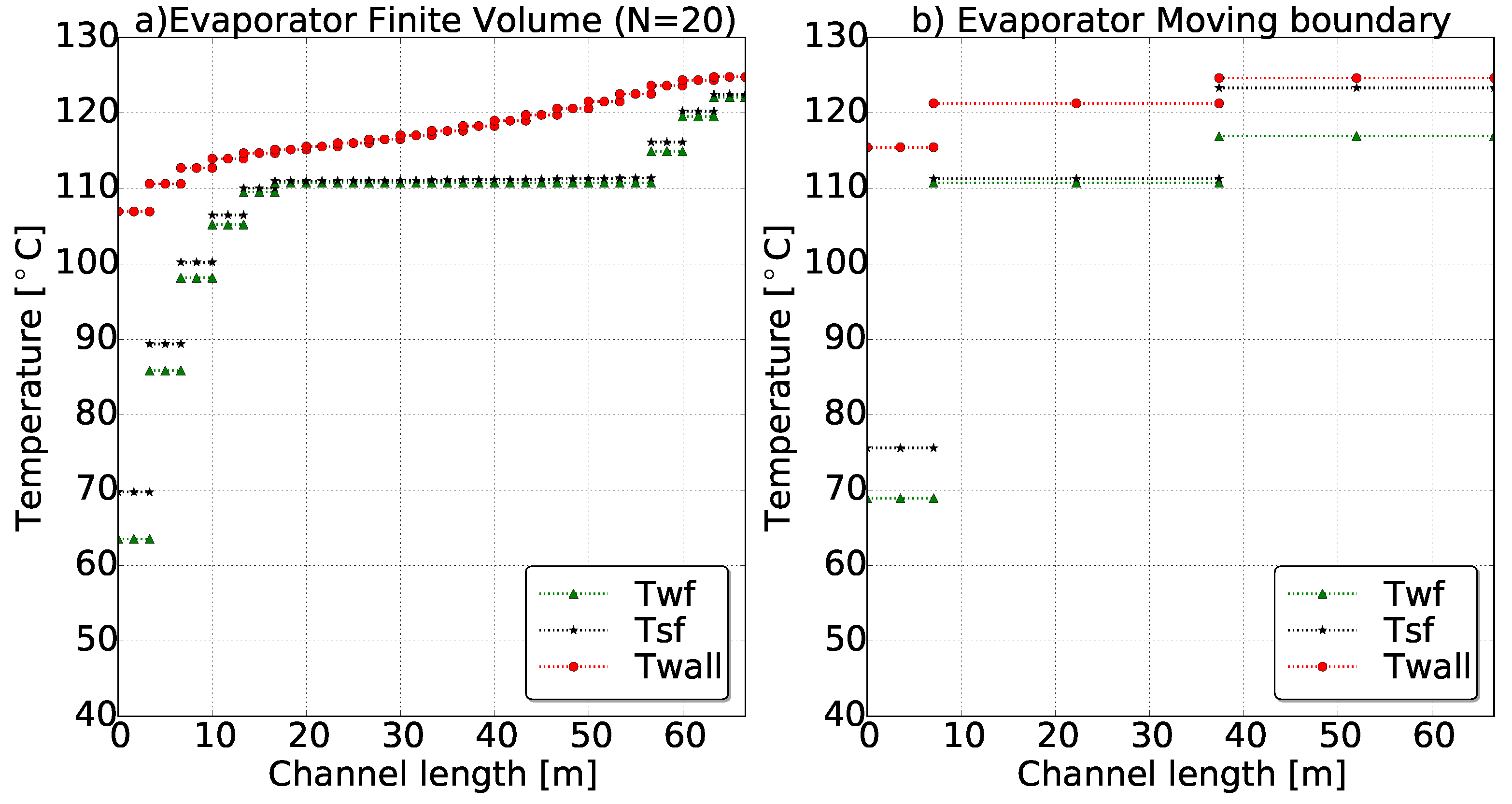
- When using an FV model, the level of discretization needs to be accurately selected. In the case of a small-scale ORC unit using plate heat exchangers, a minimum number of 20 nodes is recommended to avoid numerical inconsistency in the simulation results.
- Despite what is stated in the literature [21], the two modeling formulations are found to have a comparable level of robustness, i.e., both the FV and MB models are able to smoothly run the performed simulations. A wider range of simulation tests (e.g., start-up and shut-down of vapor compression cycles) is deemed necessary to further investigate the robustness of the two modeling approaches.
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| ORC | Organic Rankine cycle |
| APS | Absolute pressure sensor |
| RTD | Resistance temperature detector |
| CFM | Coriolis flow meter |
| FV | Finite volume |
| MB | Moving boundary |
| CV | Control volume |
| MSL | Modelica Standard library |
Appendix A
Appendix B
References
- Colonna, P.; van Putten, H. Dynamic modeling of steam power cycles: Part I—Modeling paradigm and validation. Appl. Therm. Eng. 2007, 27, 467–480. [Google Scholar] [CrossRef]
- Mattsson, S.; Elmqvist, H. Modelica—An international effort to design the next generation modeling language. In Proceedings of the 7th IFAC Symposium on Computer Aided Control Systems Design, Gent, Belgium, 28–30 April 1997.
- Dymola, Modelon. Available online: http://www.modelon.com/products/dymola/ (accessed on 14 March 2016).
- OpenModelica. Available online: https://openmodelica.org/ (accessed on 14 March 2016).
- Mehrmann, V.; Wunderlich, L. Hybrid systems of differential-algebraic equations—Analysis and numerical solution. J. Process Control 2009, 19, 1218–1228. [Google Scholar] [CrossRef]
- Casella, F.; Leva, A. Object-oriented modelling and simulation of power plants with Modelica. In Proceedings of the 44th IEEE Conference on Decision and Control, and the European Control Conference, Plaza de España Seville, Spain, 12–15 December 2005.
- Tummescheit, H.; Eborn, J.; Wagner, F.J. Development of a Modelica base library for modeling of Thermo-Hydraulic systems. In Proceedings of the Modelica Workshop, Lund, Sweden, 23–24 October 2000.
- El Hefni, B. Dynamic modeling of concentrated solar power plants with the ThermoSysPro library (Parabolic Trough collectors, Fresnel reflector and Solar-Hybrid). Energy Procedia 2013, 49, 1127–1137. [Google Scholar] [CrossRef]
- Thermal Power Library, Modelon. Available online: http://www.modelon.com/products/modelica-libraries/thermal-power-library/ (accessed on 14 March 2016).
- Casella, F.; Leva, A. Modelica open library for power plant simulation: Design and experimental validation. In Proceedings of the 3rd International Modelica Conference, Linköping, Sweden, 3–4 November 2003; pp. 41–50.
- TIL Suite, TLK-ThermoGmbH. Available online: http://www.tlk-thermo.com/index.php/en/software-products/til-suite (accessed on 14 March 2016).
- Wetter, M. Modelica library for building heating, ventilation and air-conditioning systems. 2009. [Google Scholar] [CrossRef]
- Quoilin, S.; Desideri, A.; Wronski, J.; Bell, I.H.; Lemort, V. ThermoCycle: A Modelica library for the simulation of thermodynamic systems. In Proceedings of the 10th International Modelica Conference, Lund, Sweden, 10–12 March 2014.
- Bell, I.; Wronski, J.; Quoilin, S.; Lemort, V. Pure- and Pseudo-pure fluid thermophysical property evaluation and the open-source Thermophysical Property Library CoolProp. Ind. Eng. Chem. Res. 2014, 53, 2498–2508. [Google Scholar] [CrossRef] [PubMed]
- Bendapudi, S.; Braun, J.; Groll, E.; Eckhard, A. Dynamic model of a centrifugal chiller system–Model development, numerical study and validation. ASHRAE Trans. 2005, 111, 132. [Google Scholar]
- Dhar, M.; Soedel, W. Transient analysis of a vapor compression refrigeration system. In Proceedings of the XV International Congress of Refrigeration, Venice, Italy, 23–29 September 1979.
- MacArtur, J.; Grald, E. Prediction of cyclic heat pump performance with a fully distributed model and a comparison with experimental data. ASHRAE Trans. 1987, 93, 1159–1178. [Google Scholar]
- Bendapudi, S. A Literature Review of Dynamic Models of Vapor Compression Equipment; Technical Report; Herrick Laboratories, Purdue University: West Lafayette, IN, USA, 2002. [Google Scholar]
- Bendapudi, S. Development and Validation of a Mechanistic Dynamic Model for a Vapor Compression Centrifugal Liquid Chiller; Technical Report; Herrick Laboratories, Purdue University: West Lafayette, IN, USA, 2002. [Google Scholar]
- Bonilla, J.; Dormido, S.; Cellier, F.E. Switching moving boundary models for two-phase flow evaporators and condensers. Commun. Nonlinear Sci. Numer. Simul. 2015, 20, 743–768. [Google Scholar] [CrossRef]
- Bendapudi, S.; Braun, J.E.; Groll, E.A. A comparison of moving-boundary and finite-volume formulations for transients in centrifugal chillers. Int. J. Refrig. 2008, 31, 1437–1452. [Google Scholar] [CrossRef]
- Quoilin, S.; Bell, I.H.; Desideri, A.; Dewallef, P.; Lemort, V. Methods to increase the robustness of finite-volume flow models in Thermodynamic systems. Energies 2014, 7, 1621–1640. [Google Scholar] [CrossRef]
- Quoilin, S. Sustainable Energy Conversion Through the Use of Organic Rankine Cycles for Waste Heat Recovery and Solar Applications. Ph.D. Thesis, University of Liege, Liege, Belgium, October 2011. [Google Scholar]
- Jensen, J.M. Dynamic Modeling of Thermo-Fluid Systems. Ph.D. Thesis, Technical University of Denmark, Lyngby, Denmark, 2003. [Google Scholar]
- Petzold, L.R. A Description of DASSL: A Differential/Algebraic System Solver; Technical Report, Sandia Report SAND82-8637; IMACS World Congress: Montreal, QC, Canada, 1982. [Google Scholar]
- Desideri, A.; Sergei, G.; van den Broek, M.; Lemort, V.; Quoilin, S. Experimental comparison of organic fluids for low temperature ORC (organic Rankine cycle) systems for waste heat recovery applications. Energy 2016, 97, 460–469. [Google Scholar] [CrossRef]
- Declaye, S.; Quoilin, S.; Guillaume, L.; Lemort, V. Experimental study on an open-drive scroll expander integrated into an ORC (organic Rankine cycle) system with R245fa as working fluid. Energy 2013, 55, 173–183. [Google Scholar] [CrossRef]
- Desideri, A.; van den Broek, M.; Gusev, S.; Lemort, V.; Quoilin, S. Experimental campaign and modeling of a low-capacity waste heat recovery system based on a single screw expander. In Proceedings of the 22nd International Compressor Engineering Conference, Purdue, West Lafayette, IN, USA, 14–17 July 2014.
- Grald, E.W.; MacArthur, J.W. A moving-boundary formulation for modeling time-dependent two-phase flows. Int. J. Heat Fluid Flow 1992, 13, 266–272. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| HE Region | Evaporator | Condenser |
|---|---|---|
| Sub-cooled | ||
| Super-heated |
| Model | MBConstVF | MB | FV 10 CVs | FV 20 CVs | FV 40 CVs | FV 100 CVs |
|---|---|---|---|---|---|---|
| (%) | 2.33 × 10−13 | 1.08 × 10−12 | 1.72 × 10−13 | 6.33 × 10−13 | 3.06 × 10−14 | 1.01 × 10−12 |
| (%) | 6.67 × 10−12 | 9.51 × 10−12 | 5.28 × 10−12 | 2.89 × 10−12 | 4.64 × 10−12 | 1.04 × 10−12 |
| (%) | 0.55 | 0.69 | 3.16 | 1.06 | 0.31 | 0.0 |
| (%) | 3.88 | 1.40 | 5.52 | 1.85 | 0.53 | 0.0 |
| Time (s) | 0.65 | 0.73 | 2.89 | 13.7 | 34.8 | 147 |
| Variable | Device Type | Range | Uncertainty (k = 2) |
|---|---|---|---|
| CFM | 0 to 1.8 kg·s−1 | ±0.09% | |
| T (ORC) | RTD | −50 to 300 °C | ±0.2 K |
| T (heat sink) | RTD | 0 to 150 °C | ±0.2 K |
| T (heat source) | RTD | 30 to 350 °C | ±0.2 K |
| p | APS | 0 to 16 bar | ±0.016 bar |
| Wattmeter | 0 to 34.6 kW | ±0.1% |
| Model | CPU-Time (%) |
|---|---|
| ORC unit model with FV | 13.5 |
| ORC unit model with MB | 2.45 |
| ORC unit model with MBConstFV | 2.4 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Desideri, A.; Dechesne, B.; Wronski, J.; Van den Broek, M.; Gusev, S.; Lemort, V.; Quoilin, S. Comparison of Moving Boundary and Finite-Volume Heat Exchanger Models in the Modelica Language. Energies 2016, 9, 339. https://doi.org/10.3390/en9050339
Desideri A, Dechesne B, Wronski J, Van den Broek M, Gusev S, Lemort V, Quoilin S. Comparison of Moving Boundary and Finite-Volume Heat Exchanger Models in the Modelica Language. Energies. 2016; 9(5):339. https://doi.org/10.3390/en9050339
Chicago/Turabian StyleDesideri, Adriano, Bertrand Dechesne, Jorrit Wronski, Martijn Van den Broek, Sergei Gusev, Vincent Lemort, and Sylvain Quoilin. 2016. "Comparison of Moving Boundary and Finite-Volume Heat Exchanger Models in the Modelica Language" Energies 9, no. 5: 339. https://doi.org/10.3390/en9050339
APA StyleDesideri, A., Dechesne, B., Wronski, J., Van den Broek, M., Gusev, S., Lemort, V., & Quoilin, S. (2016). Comparison of Moving Boundary and Finite-Volume Heat Exchanger Models in the Modelica Language. Energies, 9(5), 339. https://doi.org/10.3390/en9050339