
Distributed Measuring System for Predictive Diagnosis of Uninterruptible Power Supplies in Safety-Critical Applications


Abstract
:1. Introduction
- -
- -
2. Critical Analysis of the State-of-the-Art for UPS Predictive Diagnosis
- -
- An increase of the cost and the size of the diagnostic system.
- -
- Poor system scalability with an increase of the effort for its installation and maintenance.
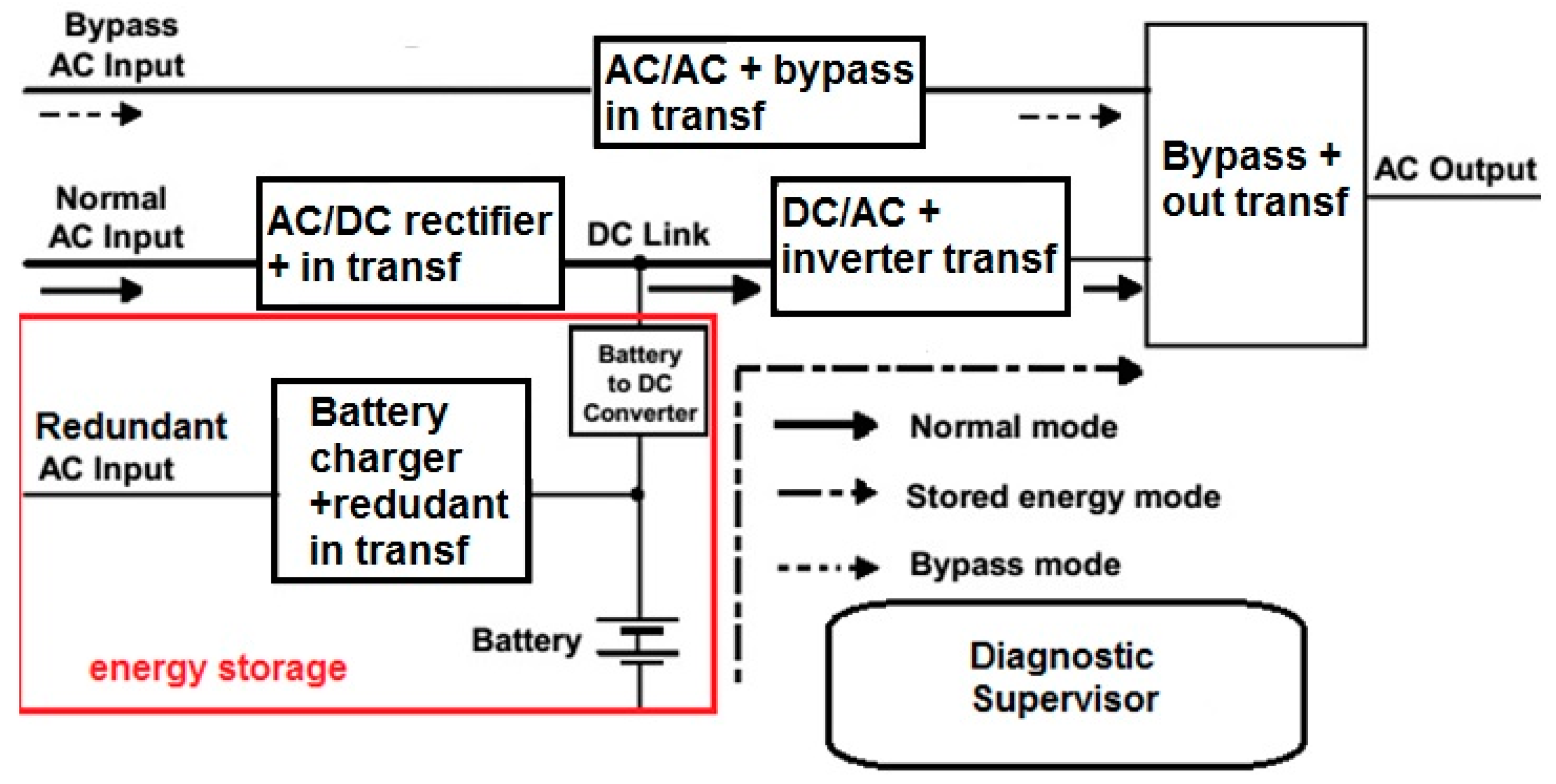
3. Innovative Power Supply System for Safety-Critical Applications
- -
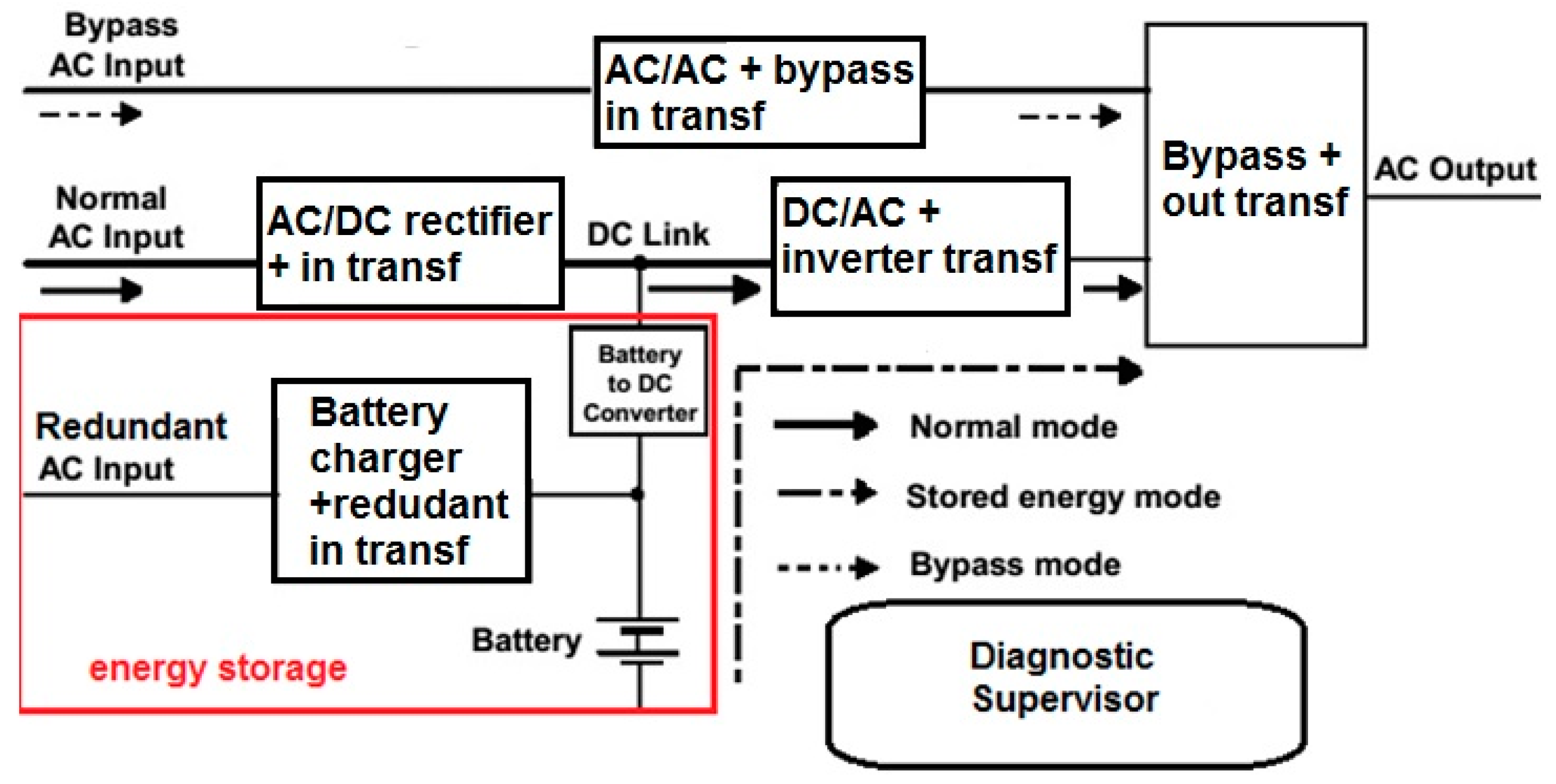
- AC/DC rectifier stage plus input transformer. This unit converts the AC voltage of the line to a DC voltage used to charge the batteries and to feed the following DC/AC inverter. The rectifier is realized through a 6-branch 3-phase silicon controlled rectifier (SCR) bridge and is sized to supply simultaneously the inverter, in conditions of maximum load, and the battery at the maximum charging current. To reduce the distortion produced by the network rectifier and the ripple to the battery, an isolation and voltage adaptation transformer is used, together with inductors placed at the exit of the bridge conversion.
- -
- Energy storage. The energy storage unit is organized as a complex array of valve regulated lead acid (VRLA) rechargeable cells. This technology is used due to its low purchase cost and low maintenance cost/effort vs. other battery technologies. Thanks to the autonomy of the energy storage subsystem, a static UPS reduces the carbon emissions related to operating an EG. The latter converts in electric energy the mechanical energy produced with an internal combustion engine. During a brief power outage, the VRLA cells provide current to the load, eliminating the need to start the EG. Battery modules with high capacity lead to a reduced number of EG starts per year. This way the fuel consumption, the CO2/NOx emissions and the warm-up and cooldown phases of the EG, are reduced.
- -
- DC/AC stage with inverter transformer. The inverter converts the DC voltage Vdc supplied by the AC/DC rectifier or from the battery into AC voltage, stabilized in terms of frequency and in terms of amplitude. The inverter output voltage is generated through a switching strategy with pulse width modulation (PWM) driving insulated gate bipolar transistor (IGBT) power devices. The use of a high carrier frequency for the PWM, and of a dedicated filter circuit constituted by the AC transformer and capacitors, ensures minimal distortion of the output voltage. A THD lower than 2% can be achieved (1.5% with a linear load in Table 1). As discussed in [48], if input and output transformers are both present, then the inverter transformer is redundant.
- -
- Bypass stage with AC/AC regulation and Bypass Switch. In normal operating mode, the inverter guarantees the power distribution. In case of malfunction or overload in the inverter, the bypass line supplies the load, through the main static switch. The possibility of a manual bypass is also foreseen. A 3-phase voltage stabilizer maintains the nominal value of the output voltage within a 2% compared to a variation of the input voltage range between ± 10% of the nominal value of the line.
- -
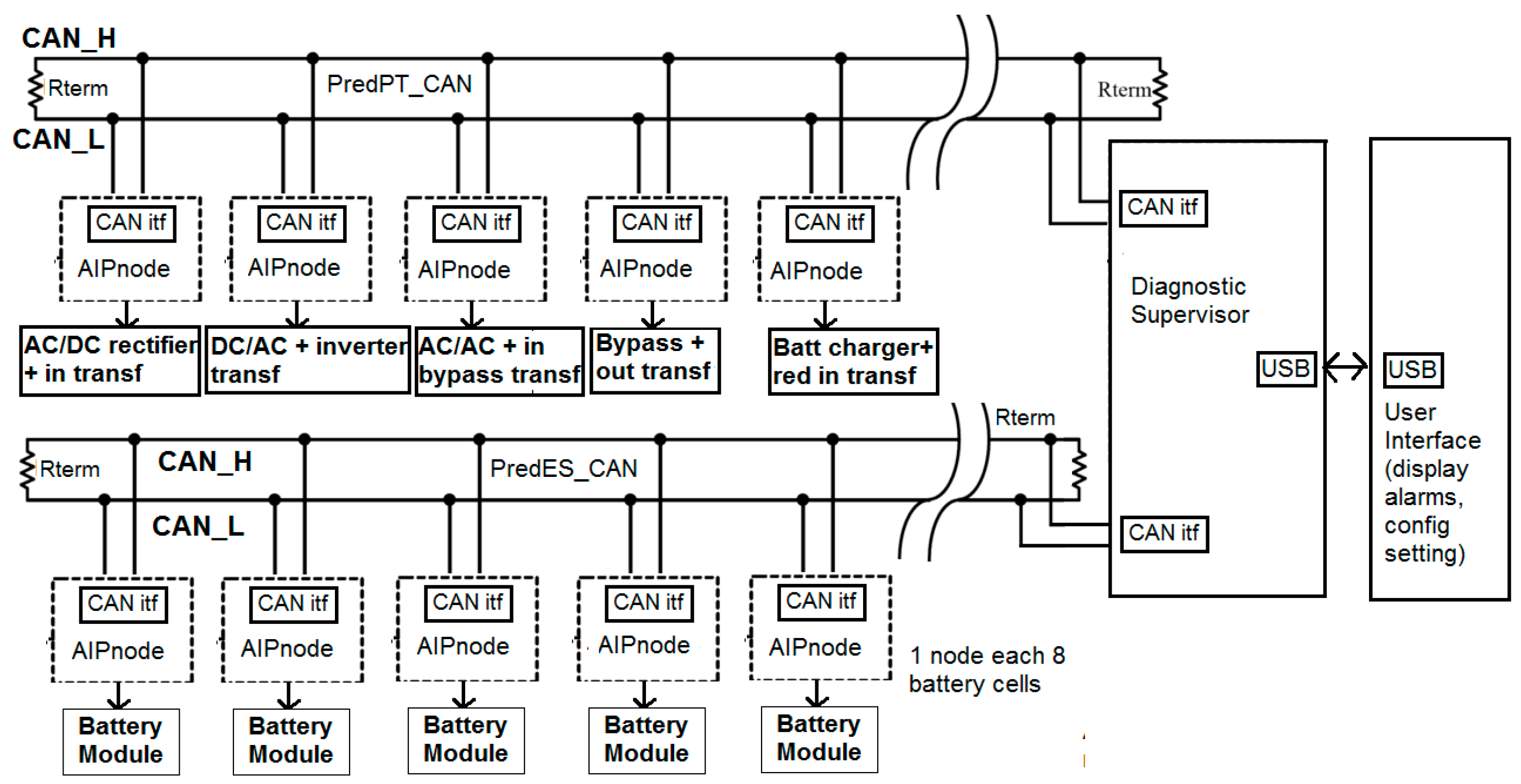
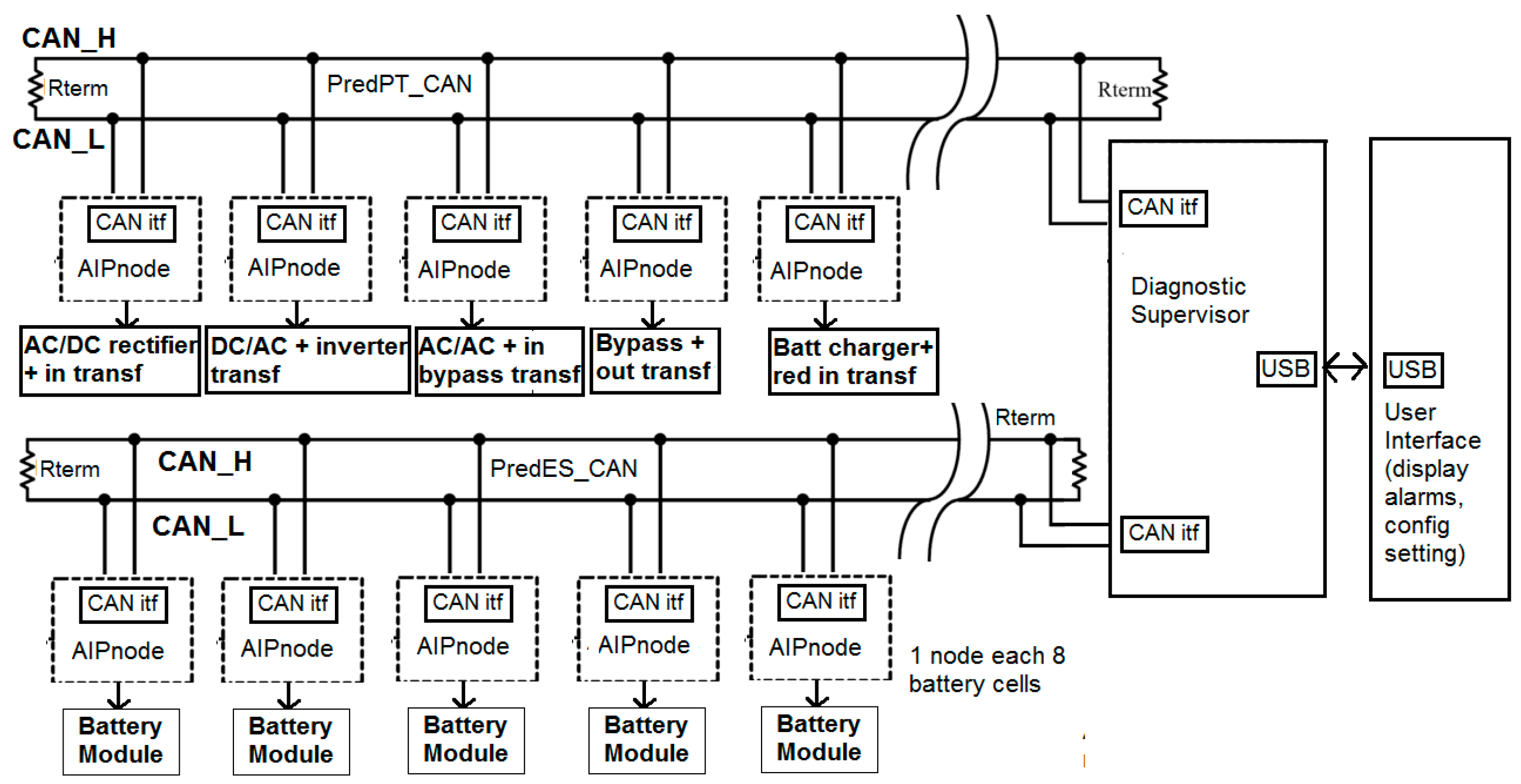
- Diagnostic supervisor. This block in Figure 1 and Figure 2, is in charge of managing for the UPS the testing and periodic checks, ensuring the operation of the equipment and generating alarms in case of anomalies. This block implements a predictive diagnostic strategy that exploits the network (see Figure 2) of monitoring units for faults in the battery modules and faults in the power transformers.
4. Battery Degradation and Specifications for the Monitoring System
5. Degradation in Power Transformers and Specifications for the Monitoring System
- -
- They allow a diagnosis of the fault when is too late and the transformer is already damaged.
- -
- As proved by experimental measurements carried out on real power systems, in the operating environment where such systems are used the background acoustic noise level is at least in the range of 60 dB/70 dB, with frequencies from few Hz to kHz. The acoustic effects of vibration degradation of the power components are detectable only after a big damage has occurred.
- -
- An accurate visual inspection often requires a stop of the DUT, thus causing a denial of service.
6. Predictive Diagnostic System Implementation
- -
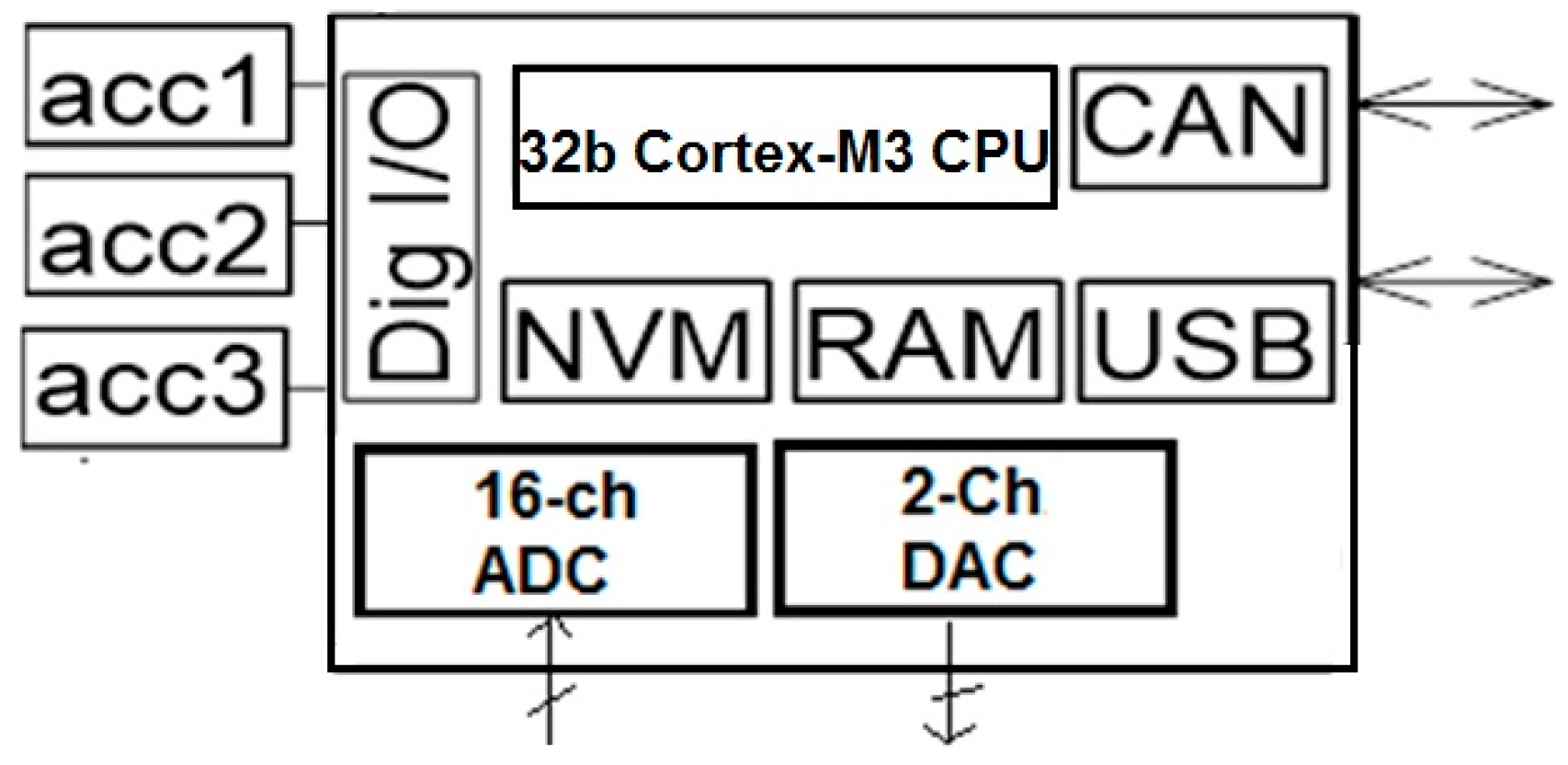
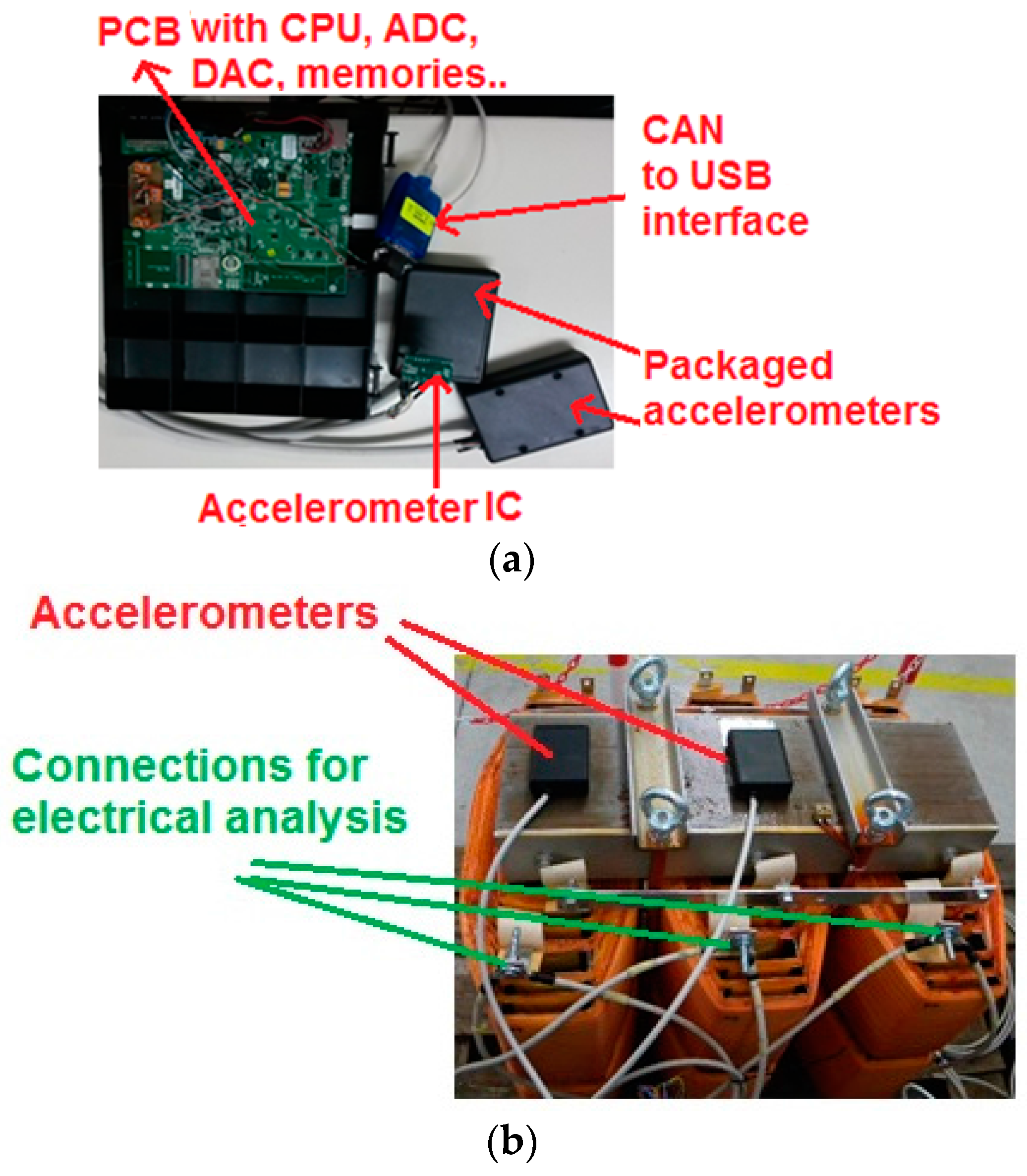
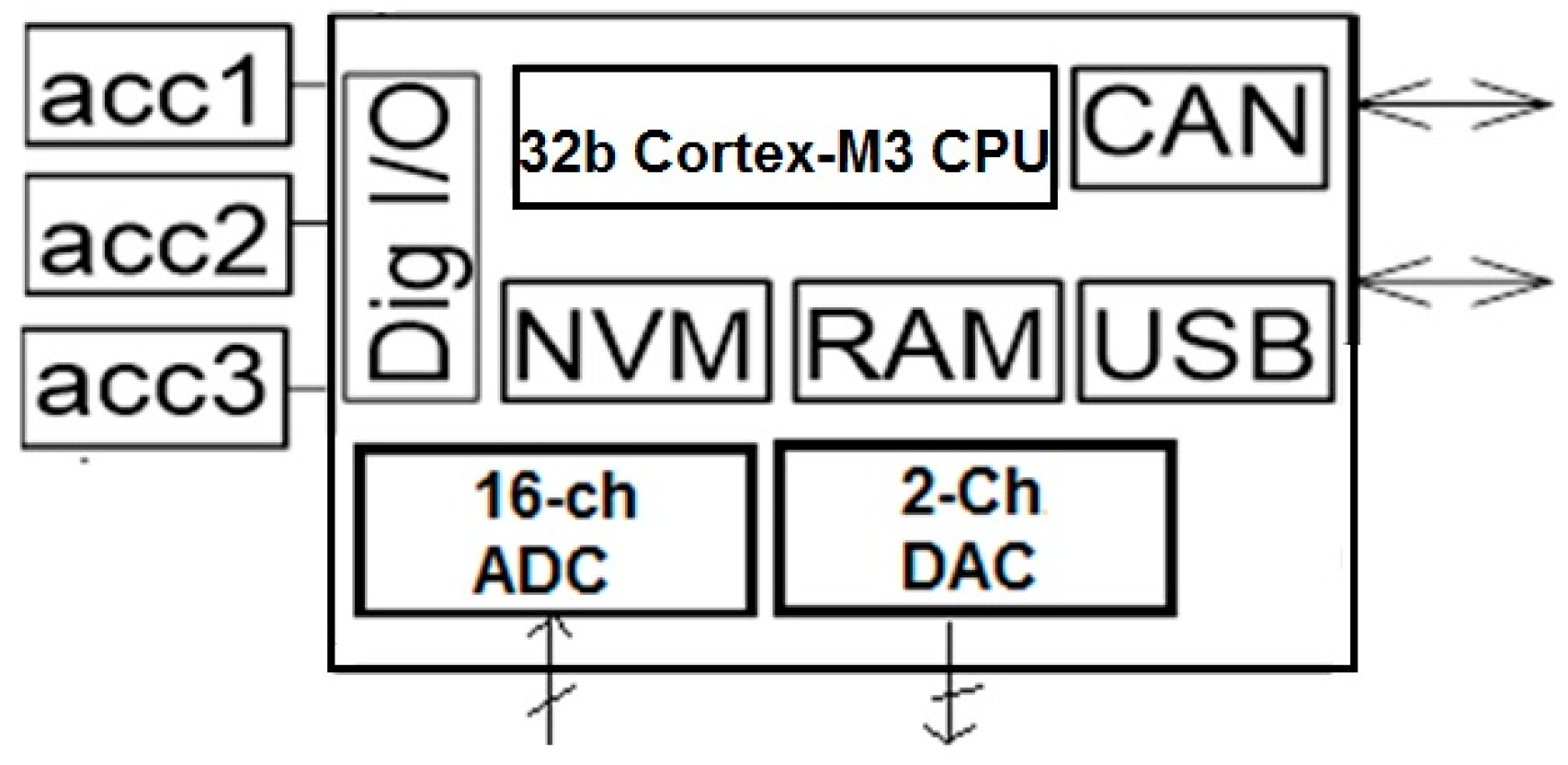
- Three capacitive accelerometers, capable of 3-axis measurements with a bandwidth up to 1 kHz, a sensitivity of 0.5 mg, and a dynamic range configured to ±2 g. The LIS3DH sensors from STMicroelectronics, realized using micro-electro-mechanical-systems (MEMS) integrated technology, have been adopted. To easy their mechanical connection with the DUT, each accelerometer is encapsulated within a dedicated case.
- -
- Each MEMS accelerometer sensor has an on-chip dedicated analog to digital converter (ADC) with relevant memory buffers, managed through a first-in first-out (FIFO) policy. The digital outputs of the MEMS accelerometers have a 16-bit data size and are acquired by the Cortex M3 processing core in Figure 4 through its digital I/O interface.
- -
- On-chip Digital to Analog Converter (DAC) with two channels, each with 12-bit resolution. A trans-conductance amplifier is mounted on the printed circuit board (PCB) to generate current waveforms at the output with peak levels up to 10 A, needed for battery impedance measures.
- -
- On-chip 48 kSa/s ADC with 16 multiplexed inputs at 14 bits.
- -
- Mixed-signal processing chip integrating a 32-bit ARM CortexM3 processor at 100 MHz with 256 kByte of non-volatile flash memory and 96 kByte of RAM memory plus a rich interface set: 3 SPIs, 1 CAN, 1 USB. A 32-bit 100 MHz unit is used instead of 8-bit or 16-bit microcontrollers [50,51,52] operating at few tens of MHz since local signal processing has to be implemented.
- -
- On-board power supply regulators that provide the needed low voltage supply levels starting from an external voltage level up to 36 V.
- -
- 10 values from 0.1 to 1 Hz with 0.1 Hz frequency resolution,
- -
- 10 values from 1 to 10 Hz with 1 Hz frequency resolution,
- -
- 10 values from 10 to 100 Hz with 10 Hz frequency resolution,
- -
- 10 values from 100 Hz to 1 kHz with a 100 Hz frequency resolution.
7. Experimental Measurements
7.1. Power Transformer Degradation
7.2. Battery Degradation
- -
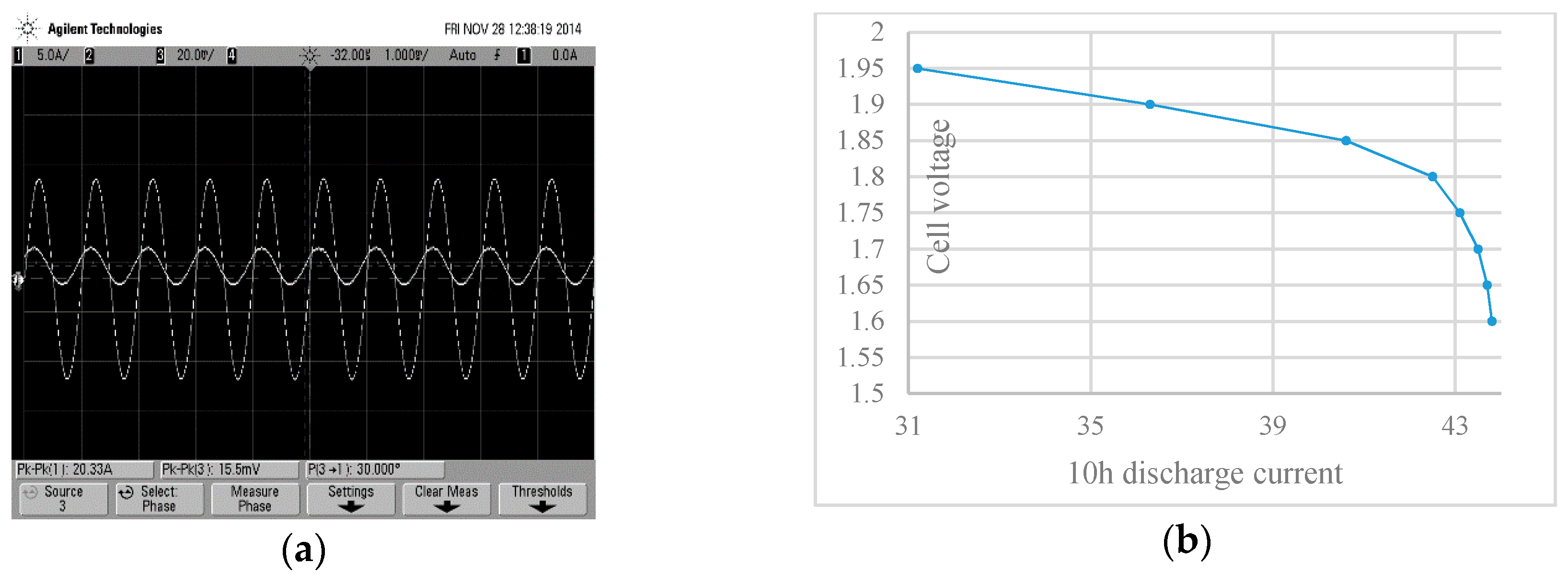
- In Figure 9a, an example acquisition of the excitation current (10 A peak) and voltage response (15.5 mV peak) at 1 kHz; the module of the impedance is 762.4 µΩ and the phase shift is 30 degrees.
- -
- In Figure 9b, the current needed to discharge in 10 h a 425 Ah cell (x axis), at 20 °C and its operating voltage (y axis). Below 1.8 V there is a rapid change in the cell behavior.
- -
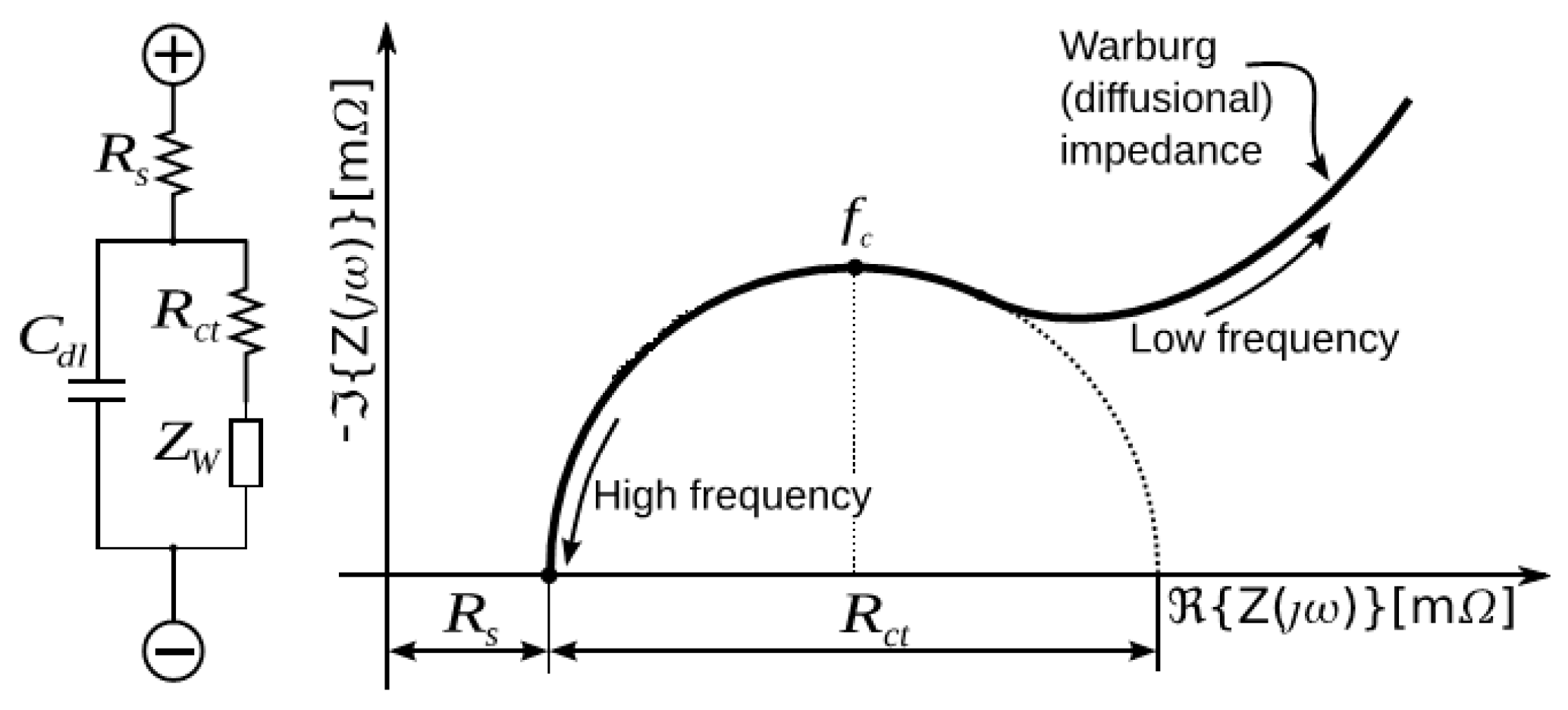
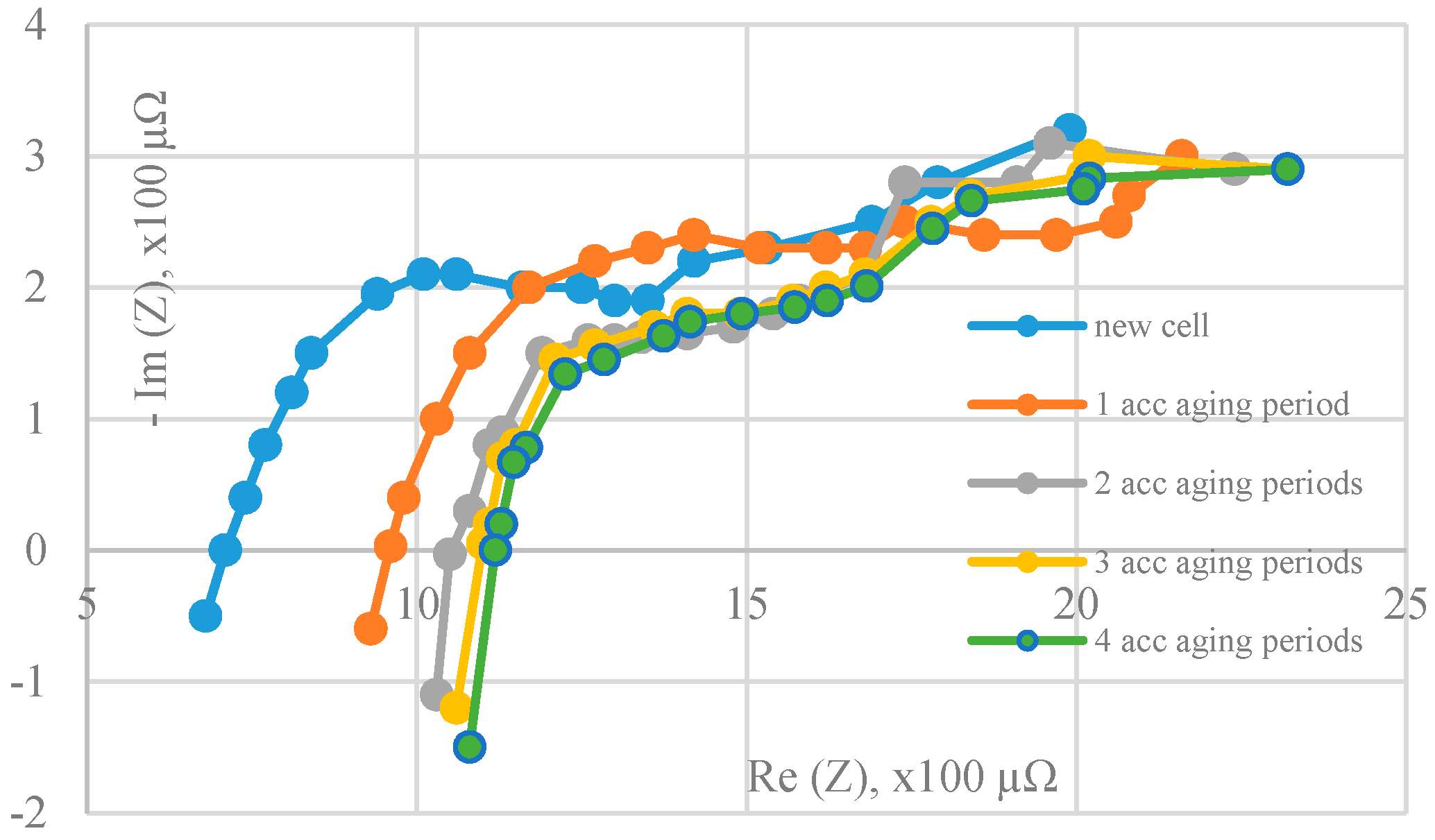
- the impedance with null imaginary part, Rs from Equation (3), usually between 500 Hz and 1 kHz;
- -
- the impedance with a peak of imaginary part, fc from Equation (1), usually above 1 Hz.
8. Conclusions
Acknowledgments
Conflicts of Interest
References
- Consilvio, A.; Di Febbraro, A.; Sacco, N. A Modular Model to Schedule Predictive Railway Maintenance Operations. In Proceedings of the 2015 International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Budapest, Hungary, 3–5 June 2015; pp. 426–433.
- Ramirez-Niño, J.; Pascacio, A.; Carrillo, J.; de la Torre, O. Monitoring network for online diagnosis of power generators. Measurement 2009, 42, 1203–1213. [Google Scholar] [CrossRef]
- Costantino, N.; Serventi, R.; Tinfena, F.; D’Abramo, P.; Chassard, P.; Tisserand, P.; Saponara, S.; Fanucci, L. Design and test of an HV-CMOS intelligent power switch with integrated protections and self-diagnostic for harsh automotive applications. IEEE Trans. Ind. Electr. 2011, 58, 2715–2727. [Google Scholar] [CrossRef]
- Sunder, R.; Kolbasseff, A.; Kieninger, K.; Rohm, A.; Walter, J. Operational Experiences with Onboard Diagnosis System for High Speed Trains. In Proceedings of the World Conference on Railway Research (WCRR), Koln, Germany, 2001; pp. 1–9.
- Umiliacchi, P.; Lane, D.; Romano, F. Predictive maintenance of railway subsystems using an Ontology based modelling approach. In Proceedings of the World Conference on Railway Research (WCRR), Lille, France, 2011; p. 110.
- Antony, J.J.V.; Nasira, G.M. Towards predictive maintenance and management in rail sector: A clustering approach. In Proceedings of the IEEE International Conference on Recent Trends in Information Technology (ICRTIT), Chennai, India, 25–27 July 2013; pp. 502–507.
- Saponara, S.; Fanucci, L.; Bernardo, F.; Falciani, A. A network of vibration measuring nodes with integrated signal processing for predictive maintenance of high power transformers. In Proceedings of the IEEE WISP 2015, Siena, NY, USA, 15–17 May 2015; pp. 1–4.
- Saponara, S.; Fanucci, L.; Falciani, A. Uninterruptible Power Supply Systems for Railway with Predictive Diagnostic against Power Transformer Failure. In Proceedings of the IEEE 15th EEEIC, Rome, Italy, 10–13 June 2015; pp. 2119–2123.
- Galar, D.; Thaduri, A.; Catelani, M.; Ciani, L. Context awareness for maintenance decision making: A diagnosis and prognosis approach. Measurement 2015, 67, 137–150. [Google Scholar] [CrossRef]
- Gumilang, H.; Ansori, E.; Siregar, R.; Subrata, I.; Henny Ika, S.; Aenul, R.; Yuliastuti, E.; Setiawan, A. Condition assessment method for power transformer as a part of condition based maintenance program in PLN P3B Jawa Bali. In Proceedings of the 2012 International Conference on Condition Monitoring and Diagnosis (CMD), Bali, Indonesia, 23–27 September 2012; pp. 269–272.
- Wardani, N.U.; Purnomoadi, A.P.; Septiani, H.I.; Arifianto, I.; Cahyono, B. Condition assessment of 500/150 kV power transformer based on condition based maintenance. In Proceedings of the 2011 International Conference on Electrical Engineering and Informatics (ICEEI), Bandung, Indonesia, 17–19 July 2011.
- Furlong, E.R. UPS topologies for large critical power systems (>500 KVA). In Proceedings of the 13th Annual Power Quality Exhibition & Conference, Atlanta, GA, USA, 30 October 2002.
- Rasmussen, N. The Different Types of UPS Systems; White paper n.1, rev.7; Schneider Electric DCSC (Data Center Science Center): Rueil Malmaison, France, 2011; pp. 1–10. [Google Scholar]
- Baronti, F.; Fantechi, G.; Fanucci, L.; Leonardi, E.; Roncella, R.; Saletti, R.; Saponara, S. State-of-charge estimation enhancing of lithium batteries through a temperature-dependent cell model. In Proceedings of the 2011 International Conference on Applied Electronics, Pilsen, Czech Republic, 7–8 September 2011; pp. 29–34.
- VRLA Batteries Introduction; Professional Battery Quality (PBQ): Haarlem, The Netherlands, 2010; pp. 1–9.
- Kramm, F. Float Life Expectancy of VRLA-Batteries Based on High Temperature Float Tests Impact of Discharge Rate, Design and Test Parameter. In Proceedings of the INTELEC 06—Twenty-Eighth International Telecommunications Energy Conference, Providence, RI, USA, 10–14 September 2006; pp. 1–5.
- Ma, H.Z.; Jiang, N.; Wang, C.N.; Geng, Z.H. Improved power transformer winding deformation fault diagnosis method. In Proceedings of the 22nd International Conference on Electricity Distribution, Stockholm, Sweden, 10–13 June 2013.
- Shao, Y.; Rao, Z. Online state diagnosis of transformer windings based on time-frequency analysis. WSEAS Trans. Circ. Syst. 2009, 8, 227–236. [Google Scholar]
- Hu, C.; Wang, P.; Youn, B.D.; Lee, W.R.; Yoon, J.T. Statistical health grade system against mechanical failures of power transformers. In Proceedings of the Conference of Prognostic and Health Management Society, Minneapolis, MN, USA, 2012.
- Ibargüengoytia, P.H.; Pascacio, A.; Betancourt, E.; Liñan, R. Probabilistic Vibration Models in the Diagnosis of Power Transformers; Chapter 6; in Recent Advances in Vibration Analysis; Baddour, N., Ed.; InTech Europe: Rijeka, Croatia, 2011; pp. 103–122. [Google Scholar]
- Yoon, J.T.; Park, K.M.; Youn, B.D.; Lee, W.R. Diagnostics of mechanical faults in power transformers, vibration sensor network design under vibration uncertainty. IEEE Eur. Conf. Progn. Health Manag. Soc. 2014, 5, 1–7. [Google Scholar]
- Nafar, M.; Bahmanifirouzi, B.; Jabbari, M. Transformer Monitoring by using Vibration Analysis. Aust. J. Basic Appl. Sci. 2011, 5, 984–990. [Google Scholar]
- Beltle, M.; Tenbohlen, S. Usability of vibration measurement for power transformer diagnosis and monitoring. In Proceedings of the 2012 International Conference on Condition Monitoring and Diagnosis (CMD), Bali, Indonesia, 23–27 September 2012; pp. 281–284.
- Wui, S.; Huang, W.; Kong, F.; Wu, Q.; Zhong, F.; Zhang, R.; Wang, Z. Extracting Power Transformer Vibration Features by a Time-Scale-Frequency Analysis Method. Electromagn. Anal. Appl. 2010, 2, 31–38. [Google Scholar] [CrossRef]
- Jin, M.; Pan, J.; Huang, H.; Zhou, J. Transmission of vibration of a power transformer from the internal structures to the tank. In Proceedings of the Acoustics 2012—Fremantle, Fremantle, Australia, 21–23 November 2012; pp. 1–7.
- Garcia, B.; Burgos, J.C.; Alonso, Á.M. Transformer Tank Vibration Modeling as a Method of Detecting Winding Deformations—Part II: Experimental Verification. IEEE Trans. Power Deliv. 2006, 21, 164–169. [Google Scholar] [CrossRef]
- Garcia, B.; Burgos, J.C.; Alonso, Á.M. Transformer Tank Vibration Modeling as a Method of Detecting Winding Deformations—Part I: Theoretical Foundation. IEEE Trans. Power Deliv. 2006, 21, 157–163. [Google Scholar] [CrossRef]
- Ming, D.Y. Research on Fault Diagnosis System for Power Transformer Based on Audio Signal. Master’s Thesis, Huazhong University of Science and Technology, Wuhan, China, 2013. [Google Scholar]
- Kim, J.-W.; Park, B.; Jeong, S.C.; Kim, S.W.; Park, P. Fault Diagnosis of a Power Transformer Using an Improved Frequency-Response Analysis. IEEE Trans. Power Deliv. 2005, 20, 169–178. [Google Scholar] [CrossRef]
- Li, H.; Zhang, B.; Chen, J.; Chao, C.; Wang, Y. Simulation and Test on Vibration Characteristics of Power Transformer Windings. In Proceedings of the International Symposium on Computers & Informatics (ISCI 2015), Beijing, China, 17–18 January 2015; pp. 1259–1267.
- Van der Veen, M.; de Leon, F.; Gladstone, B.; Tatu, V. Measuring Acoustic Noise Emitted by Power Transformers; AES 109th convention: Los Angeles, CA, USA, 2000; pp. 1–19. [Google Scholar]
- Arseneau, R.; Filipski, P.S.; Zelle, J.J. An improved three-phase digital recorder system for calibrating power instrumentation. IEEE Trans. Instr. Meas. 1997, 46, 399–402. [Google Scholar] [CrossRef]
- Arri, E.; Carta, A.; Mocci, F.; Tosi, M. Diagnosis of the State of Power Transformer Windings by On-Line Measurement of Stray Reactance. IEEE Trans. Instr. Meas. 1993, 42, 372–378. [Google Scholar] [CrossRef]
- Rietveld, G.; van der Beek, J.H.; Houtzager, E. Accurate DC current ratio measurements for primary currents up to 600 A. IEEE Trans. Instr. Meas. 2015, 64, 3055–3061. [Google Scholar] [CrossRef]
- Cataliotti, A.; Cosentino, V.; Di Cara, D.; Nuccio, S.; Tinè, G. Rogowski coil current transducer compensation method for harmonic active power error. Measurement 2015, 63, 240–251. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, H.B.; Li, Z.H. A novelty digital algorithm for online measurement of dielectric loss factor of electronic transformers. Measurement 2013, 46, 1200–1207. [Google Scholar] [CrossRef]
- Koufakis, E.I.; Karagiannopoulos, C.G.; Bourkas, P.D. Thermal coefficient measurements of the insulation in distribution transformers of a 20 kV network. Measurement 2008, 41, 10–19. [Google Scholar] [CrossRef]
- Sarkar, B.; Koley, C.; Roy, N.K.; Kumbhakar, P. Condition monitoring of high voltage transformers using Fiber Bragg Grating Sensor. Measurement 2015, 74, 255–267. [Google Scholar] [CrossRef]
- Jung, J.K.; Kang, J.H.; Lee, S.H.; Kim, M. In-situ measurement of the current transformer burden in a current transformer testing system using a shunt resistor. Measurement 2007, 40, 876–882. [Google Scholar] [CrossRef]
- So, E.; Arseneau, R.; Hanique, E. No-load loss measurements of power transformers under distorted supply voltage waveform conditions. IEEE Trans. Instr. Meas. 2003, 52, 429–432. [Google Scholar] [CrossRef]
- Arseneau, R.; So, E.; Banique, E. Measurements and Correction of No-Load Losses of Power Transformers. IEEE Trans. Instr. Meas. 2005, 54, 503–506. [Google Scholar] [CrossRef]
- Blanke, H.; Bohlen, O.; Buller, S.; De Doncker, R.W.; Fricke, B.; Hammouche, A.; Linzen, D.; Thele, M.; Sauer, D.U. Impedance measurements on lead–acid batteries for state-of-charge, state-of-health and cranking capability prognosis in electric and hybrid electric vehicles. J. Power Sources 2005, 144, 418–425. [Google Scholar] [CrossRef]
- Suozzo, C. Lead-Acid Battery Aging and State of Health Diagnosis. Master’s Thesis, Ohio State University, Columbus, OH, USA, 2008. [Google Scholar]
- Huet, F. A review of impedance measurements for determination of the state-of-charge or state-of-health of secondary batteries. J. Power Sources 1998, 70, 59–69. [Google Scholar] [CrossRef]
- Micea, M.V.; Ungurean, L.; Cârstoiu, G.N.; Groza, V. Online State-of-Health Assessment for Battery Management Systems. IEEE Trans. Instr. Meas. 2011, 60, 1997–2006. [Google Scholar] [CrossRef]
- Yu, J.B. State-of-health monitoring and prediction of lithium-ion battery using probabilistic indication and state-space model. IEEE Trans. Instr. Meas. 2015, 64, 2937–2949. [Google Scholar]
- Stevanatto, L.C.; Brusamarello, V.J.; Tairov, S. Parameter identification and analysis of uncertainties in measurements of lead–acid batteries. IEEE Trans. Instr. Meas. 2014, 63, 761–768. [Google Scholar] [CrossRef]
- Rasmussen, N. The Role of Isolation Transformers in Data Center UPS Systems; White Paper n. 9, rev. 0; Schneider Electric Data Center Science Center: Rueil Malmaison, France, 2011; pp. 1–26. [Google Scholar]
- Corrigan, S. Controller Area Network Physical Layer Requirements; TI Application Report, SLLA270; Texas Instruments: Dallas, TX, USA, 2008. [Google Scholar]
- Fanucci, L.; Saponara, S.; Morello, A. Power optimization of an 8051-compliant IP microcontroller. IEICE Trans. Electron. 2005, E88-C, 597–600. [Google Scholar] [CrossRef]
- Saponara, S.; Petri, E.; Fanucci, L.; Terreni, P. Sensor modeling, low-complexity fusion algorithms, and mixed-signal IC prototyping for gas measures in low-emission vehicles. IEEE Trans. Instr. Meas. 2011, 60, 372–384. [Google Scholar] [CrossRef]
- Marsi, S.; Saponara, S. Integrated video motion estimator with Retinex-like pre-processing for robust motion analysis in automotive scenarios: Algorithmic and real-time architecture design. J. Real-Time Image Process. 2010, 5, 275–289. [Google Scholar] [CrossRef]
- L’insalata, N.E.; Saponara, S.; Fanucci, L.; Terreni, P. Automatic synthesis of cost effective FFT/FFT cores for VLSI OFDM systems. IEICE Trans. Electron. 2008, E91-C, 487–496. [Google Scholar] [CrossRef]
- Fanucci, L.; Saletti, R.; Saponara, S. Parametrized and reusable VLSI macro cells for the low-power realization of 2-D discrete-cosine-transform. Microelectron. J. 2001, 32, 1035–1045. [Google Scholar] [CrossRef]
- Genovesi, S.; Saponara, S.; Monorchio, A. Parametric design of compact dual-frequency antennas for wireless sensor networks. IEEE Trans. Antennas Prop. 2011, 59, 2619–2627. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UPS System | |||||||
|---|---|---|---|---|---|---|---|
| Size (kVA) | Input Voltage (Vac) | Input Freq. (Hz) | Input Current Distortion, % | Input Voltage (Vdc) | Output Voltage (Vac) | Output Freq. (Hz) | Efficiency (%) |
| 10 to 150 | 400 V ± 20% | 50 Hz/60 Hz ± 10% | 5% with 12 pulses bridge + THD filter | 384 V ± 20% (e.g., from batteries) | 3 × 400 V ± 5% (see inverter output data) | 50 Hz/60 Hz ± 1% | 88 to 93 |
| SCR-Based Rectifier (AC/DC) | |||||||
| Output Current Max. (A) | Efficiency (%) | ||||||
| 50 to 350 | 93 to 97 | ||||||
| IGBT-Based Inverter (DC/AC) | |||||||
| Input Voltage (Vdc) | Efficiency (%) | Output Voltage (Vac) | Output Voltage Stability (static) | Output Voltage Stability (dynamic) | Total Harmonic Distortion (THD) | ||
| 384 V ± 20% (min. 307 V) | 95 to 96 | 3 × 400 V | 1% static * | 5% dynamic, reset to 1% in 40 ms * | 1.5% linear load **, <5% with no linear load ** | ||
© 2016 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saponara, S. Distributed Measuring System for Predictive Diagnosis of Uninterruptible Power Supplies in Safety-Critical Applications. Energies 2016, 9, 327. https://doi.org/10.3390/en9050327
Saponara S. Distributed Measuring System for Predictive Diagnosis of Uninterruptible Power Supplies in Safety-Critical Applications. Energies. 2016; 9(5):327. https://doi.org/10.3390/en9050327
Chicago/Turabian StyleSaponara, Sergio. 2016. "Distributed Measuring System for Predictive Diagnosis of Uninterruptible Power Supplies in Safety-Critical Applications" Energies 9, no. 5: 327. https://doi.org/10.3390/en9050327
APA StyleSaponara, S. (2016). Distributed Measuring System for Predictive Diagnosis of Uninterruptible Power Supplies in Safety-Critical Applications. Energies, 9(5), 327. https://doi.org/10.3390/en9050327