
Failure Mode Identification and End of Life Scenarios of Offshore Wind Turbines: A Review


Abstract
:1. Introduction
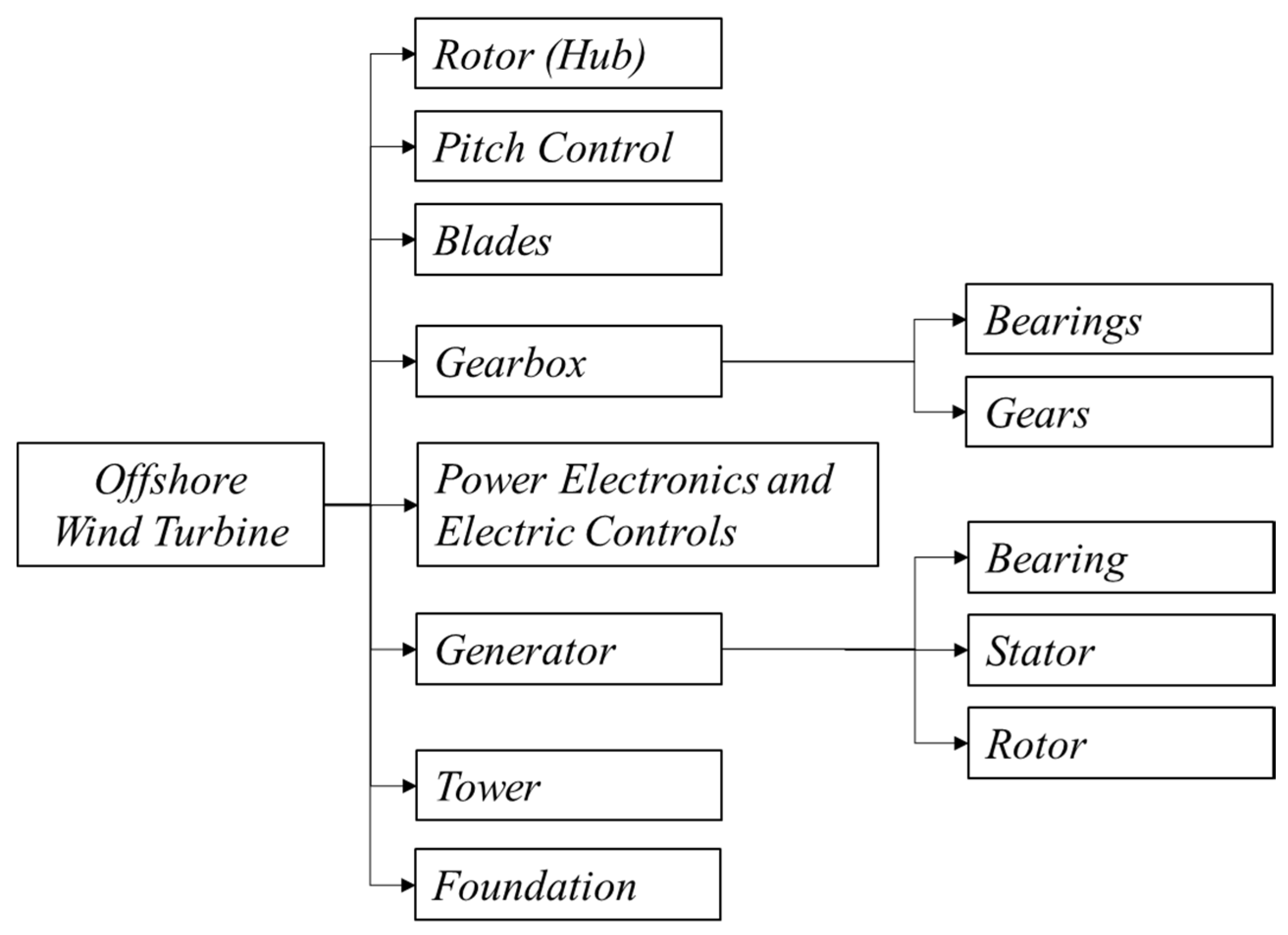
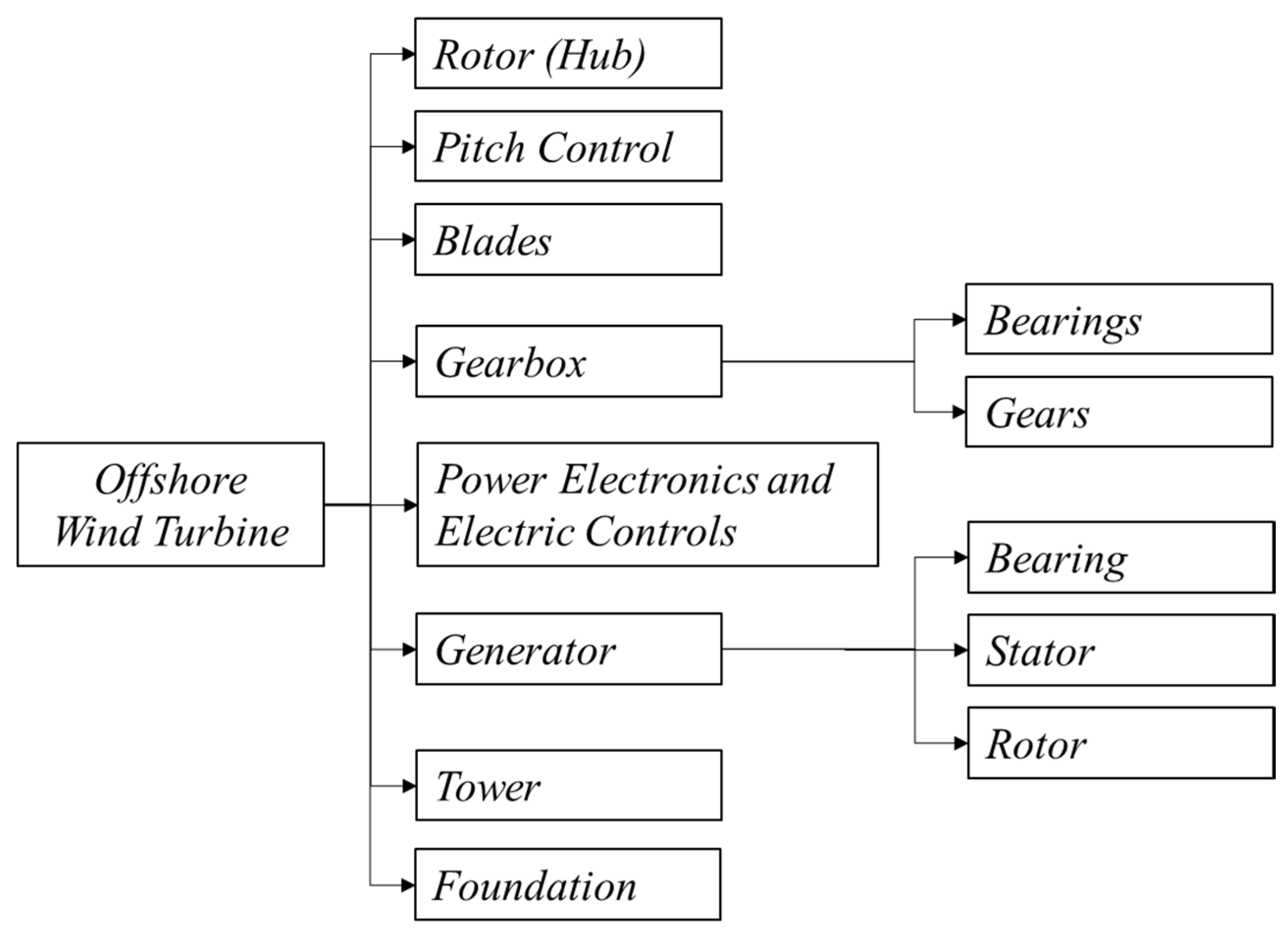
2. Service life Failure Mode Identification

{kind=link}
| Rotor (Hub) | Ref | Blades | Ref | Generator (Bearing Stator and Rotor) | Ref |
|---|---|---|---|---|---|
| Aerodynamic asymmetry | [16] | Cracks | [17] | Inter turn short circuit | [18] |
| Yaw misalignment | [19] | Delaminations of the composite | [20] | Abnormal connection of the stator winding | [18] |
| Creep and corrosion fatigue | [21] | Surface wear | [22] | Dynamic eccentricity | [18] |
| Non-uniform air gap (bearings) | [23] | Increased surface roughness | [24] | Opening or shorting of stator or rotor winding circuits | [18] |
| Hub spinng on shaft | [21] | Fatigue | [25] | Rotor eccentricity | [26,27] |
| Shaft misalignment | [17] | Lightning strikes | [28] | Rotor broken bar | [18] |
| Torsional oscillation | [29] | High vibrations | [30] | Rotor cracked end-ring | [18] |
| Deviation in the torque-speed ratio | [29] | Flapwise fatigue damage | [25] | Torque reduction | [31] |
| Mass imbalance | [32] | Unsteady blades air loads | [33] | Excessive stresses during operation | [34] |
| Pitch control | Ref | Blade fracture | [21] | Static and/or dynamic air gap eccentricities | [18] |
| Premature brake activation | [21] | Unsteady performance | [28] | Increased torque pulsation | [18,31] |
| Inability of excessive operational load mitigation | [35] | Corrosion | [28] | Excessive heating in the winding | [18] |
| Operation instability due to hydraulic system failure | [36] | Gearbox (bearings and gears) | Ref | Increase in losses and efficiency reduction | [31] |
| Air contamination in the hydraulic system | [37] | Gear tooth damage | [38] | Rotor misalignment | [39] |
| Inability of aerodynamic braking | [35] | Pitting | [38] | Imbalances and harmonics in the air gap flux | [18,40] |
| Hydraulic fluid bulk modulus reduction | [37] | Cracking | [38] | Shorted winding coil (reduction in generator reactance) | [29] |
| Leakage in the hydraulic system | [37] | Gear eccentricity | [29] | Tower and Foundation | Ref |
| Asymmetry in pitch angle | [17] | Tooth crack | [29] | Fatigue | [41] |
| Power electronics and electric controls | Ref | Shaft-Gearbox coupling failure | [21] | Cracks | [42] |
| Semiconductor devices defects | [43] | Scratching (abrasive wear) | [38] | Corrosion | [42] |
| Open circuit failure in 3-phase power converter | [43] | Scoring (adhesive wear) | [38] | Excessive fouling of foundation | [44] |
| Short circuit failure in 3-phase power converter | [43] | Lubricant viscosity changes | [26] | Loss of capacity in foundation due to cyclic loading | [45] |
| Gate-drive circuit failure in 3-phase power converter | [43] | Lubricant loss of water content | [26] | Soil instability | [44] |
| Overheating | [43] | Presence of additives/debris in the lubricant | [46] | Earthquakes | [44] |
| Error in wind speed/direction measurement | [43] | – | – | Change of modal parameters due to cyclic loading | [45] |
| – | – | – | – | Scour | [47] |
2.1. Rotor and blades
2.2. Pitch Control System
2.3. Gearbox
2.4. Generator
2.5. Power Electronics and electric controls
2.6. Tower and Foundation
3. Review of EOL scenarios
3.1. Life Extension
3.2. Repowering
- The WF’s profitability—as time passes both performance and reliability decrease.
- The profits expectation for both life extension and the different repowering options.
- The cost-benefit ratio that repowering will present against the full decommissioning of the WF and project components recycling.
- Same tower with a new, lower capacity turbine: this option combines a smaller WT that may even produce less electricity, needs less maintenance (higher availability) and have a nominal service life of an additional 25 years, with the same tower that, having decreased the power of the turbine, will have less applied loads and therefore longer fatigue life.
- Same tower with a new, higher capacity turbine: this option combines a higher WT that will produce more electricity and will last another 25 years, with the same tower that having increased the power of the turbine will be subject to greater loads and therefore its structural integrity should be rigorously reassessed. For that reason, this option usually will not be favourable, unless the structural integrity of the tower will be sufficient to fulfil the new requirements.
- New tower with a new, higher capacity turbine: this option entails the tower and nacelle decommissioning for the later commissioning of a new WT.
3.3. Decommissioning
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lozano-Minguez, E.; Kolios, A.J.; Brennan, F.P. Multi-criteria assessment of offshore wind turbine support structures. Renew. Energy 2011, 36, 2831–2837. [Google Scholar] [CrossRef] [Green Version]
- European Commission. Communication from the Commission to the European Parliament, the Council, the European Economic and Social Committee and the Committee of the Regions. Available online: http://ec.europa.eu/europe2020/pdf/europe2020stocktaking_en.pdf (accessed on 3 August 2015).
- European Union Committee. The EU’s Target for Renewable Energy: 20% by 2020, 2008. Available online: http://www.publications.parliament.uk/pa/ld200708/ldselect/ldeucom/175/175.pdf (accessed on 3 August 2015).
- Nikolau, N. Deep Water Offshore Wind Technologies. Master’s Thesis, University of Strathclyde, Glasgow, Scotland, September 2004. [Google Scholar]
- Kolios, A.J.; Rodriguez-Tsouroukdissian, A.; Salonitis, K. Multi-criteria decision analysis of offshore wind turbines support structures under stochastic inputs. Ships Offshore Struct. 2014, 2014. [Google Scholar] [CrossRef]
- Martin, H.; Spano, G.; Küster, J.F.; Collu, M.; Kolios, A.J. Application and extension of the TOPSIS method for the assessment of floating offshore wind turbine support structures. Ships Offshore Struct. 2013, 8, 477–487. [Google Scholar] [CrossRef]
- Kolios, A.J.; Read, G. A political, economic, social, technology, legal and environmental (PESTLE) approach for risk identification of the tidal industry in the United Kingdom. Energies 2013, 6, 5023–5045. [Google Scholar] [CrossRef] [Green Version]
- Kolios, A.J.; Read, G.; Ioannou, A. Application of multi-criteria decision-making to risk prioritisation in tidal energy developments. Int. J. Sustain. Energy 2014, 2014. [Google Scholar] [CrossRef]
- Arunajadai, S.G.; Uder, S.J.; Stone, R.B.; Tumer, I.Y. Failure mode identification through clustering analysis. Qual. Reliab. Eng. Int. 2004, 20, 511–526. [Google Scholar] [CrossRef]
- Stamatis, D.H. Failure Mode and Effect Analysis: FMEA from Theory to Execution, 2nd ed.; ASQ Quality Press: Milwaukee, WI, USA, 2003. [Google Scholar]
- Liu, H.-C.; Liu, L.; Liu, N. Risk evaluation approaches in failure mode and effects analysis: A literature review. Expert Syst. Appl. 2013, 40, 828–838. [Google Scholar] [CrossRef]
- Military Standard, Procedures for Performing a Failure Mode, Effects and Criticality Analysis; MIL-STD-1629A; Department of Defense: Arlington County, VA, USA, November 1980.
- Bowles, J. Fundamentals of failure mode and effect analysis. In Proceedings of the 2012 Annual Reliability and Maintainability Symposium, Nugget Hotel and Resort Reno, NV, USA, 23–26 January 2012.
- Kmenta, S.; Ishii, K. Scenario-Based Failure Modes and Effects Analysis Using Expected Cost. J. Mech. Des. 2004, 126, 1027–1035. [Google Scholar] [CrossRef]
- Shafiee, M.; Kolios, A. A multi-criteria decision model to mitigate the operational risks of offshore wind infrastructures. In Safety and Reliability: Methodology and Applications; CRC Press: Boca Raton, FL, USA, 2014; pp. 539–547. [Google Scholar]
- Caselitz, P.; Giebhardt, J.; Mevenkamp, M. Application of condition monitoring systems in wind energy convertors. In Proceedings of the European Wind Energy Conference, EWEC’97, Dublin, Ireland, 6–9 October 1997; pp. 579–582.
- Lu, B.; Li, Y.; Wu, X.; Yang, Z. A review of recent advances in wind turbine condition monitoring and fault diagnosis. In Proceedings of 2009 Power Electronics and Machines in Wind Applications (PEMWA 2009), Lincoln, NE, USA, 24–26 June 2009; pp. 1–7.
- Popa, L.M.; Jensen, B.-B.; Ritchie, E.; Boldea, I. Condition monitoring of wind generators. In Proceedings of the 38th IAS Annual Meeting on Industry Applications Conference, Salt Lake City, UT, USA, 12–16 October 2003; pp. 1839–1846.
- Caselitz, P.; Giebhardt, J.; Mevenkamp, M. Online fault detection and prediction in wind energy convertors. In Proceedings of the European Wind Energy Conference, EWEC’94, Thessaloniki, Greece, 10–14 October 1994; pp. 623–627.
- Tsai, C.S.; Hsieh, C.-T.; Huang, S.J. Enhancement of damage detection of wind turbine blades via CWT-based approaches. IEEE Trans. Energy Convers. 2006, 21, 776–781. [Google Scholar] [CrossRef]
- Kusiak, A.; Zhang, Z.; Verma, A. Prediction, operations, and condition monitoring in wind energy. Energy 2013, 60, 1–12. [Google Scholar] [CrossRef]
- Rumsey, M.A.; Paquette, J.A. Structural health monitoring of wind turbine blades. Proc. SPIE 2008, 6933. [Google Scholar] [CrossRef]
- Brusa, E.; Amati, N. Condition monitoring of rotors on active magnetic bearings (AMB) fed by induction motors. In Proceedings of IEEE/ASME Advanced Engineering Mechatronics, Como, Italy, 8–12 July 2001; pp. 750–756.
- Boger, L.; Wichmann, M.H.G.; Meyer, L.O.; Schulte, K. Load and health monitoring in glass fibre reinforced composites with an electrically conductive nanocomposite epoxy matrix. Compos. Sci. Technol. 2008, 68, 1886–1894. [Google Scholar] [CrossRef]
- Arrigan, J.; Pakrashi, V.; Basu, B.; Nagarajaiah, S. Control of flapwise vibrations in wind turbine blades using semi-active tuned mass dampers. Struct. Control. Health Monit. 2010, 18, 840–851. [Google Scholar] [CrossRef]
- Orsagh, R.F.; Lee, H.; Watson, M.; Byington, C.S.; Powers, J. Advanced Vibration Monitoring for Wind Turbine Health Management. Available online: http://rlwinc.com/Resources/TechnicalPublicationPDFs/PowerandIndustrial/Impact_PI_IMSASD-AWEA%20HUMS.pdf (accessed on 3 August 2015).
- Thomson, W.T.; Gilmore, R.J. Motor current signature analysis to detect faults in induction motordrives: Fundamentals, data interpretation and industrial case histories. In Proceedings of the 32nd Turbomachinery Symposium, Houston, TX, USA, 9–11 September 2003; pp. 45–156.
- Cotton, I.; Jenkins, N.; Pandiaraj, K. Lightning protection for wind turbine blades and bearings. Wind Energy 2001, 4, 23–37. [Google Scholar] [CrossRef]
- Yang, W.; Tavner, P.J.; Wilkinson, M.R. Condition monitoring and fault diagnosis of a wind turbine synchronous generator drive train. IET Renew. Power Gener. 2009, 3, 1–11. [Google Scholar] [CrossRef]
- Volanthen, M. Blade and rotor condition monitoring using blade load measurement data. In Proceedings of Non-Grid-Connected Wind Power Systems; American Scholars Press: Marietta, GA, USA, 2007; pp. 468–473. [Google Scholar]
- Ilonen, J.; Kamarainen, J.-K.; Lindh, T.; Ahola, J.; Kälviäinen, H.; Partanen, J. Diagnosis tool for motor condition monitoring. IEEE Trans. Ind. Appl. 2005, 41, 963–971. [Google Scholar] [CrossRef]
- Niebsch, J.; Ramlau, R.; Nguyen, T.T. Mass and aerodynamic imbalance estimates of wind turbines. Energies 2010, 3, 696–710. [Google Scholar] [CrossRef]
- Shen, X.; Zhu, X.; Du, Z. Wind turbine aerodynamics and loads control in wind shear flow. Energy 2011, 36, 1424–1434. [Google Scholar] [CrossRef]
- Mehrjou, M.R.; Mariun, N.; Marhaban, M.H.; Misron, N. Rotor fault condition monitoring techniques for squirrel-cage induction machine. Mech. Syst. Signal Process. 2011, 25, 2827–2848. [Google Scholar] [CrossRef]
- Hansen, M.H. How Hard can it be to Pitch a Wind Turbine Blade? RISO Lab, Denmark Technical University. Available online: www.risoe.dtu.dk/rispubl/art/2007_321_presentation.pdf (accessed on 3 August 2015).
- Yang, X.; Li, J.; Liu, W.; Guo, P. Petri net model and reliability evaluation for wind turbine hydraulic variable pitch systems. Energies 2011, 4, 978–997. [Google Scholar] [CrossRef]
- Watton, J. Modelling, Monitoring and Diagnostic Techniques for Fluid Power Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- McNiff, B. The gearbox reliability. In Proceedings of the 2nd Sandia National Laboratories Wind Turbine Reliability Workshop, Albuquerque, NM, USA, 17–18 September 2007.
- Watson, S.J.; Xiang, J. Real-time condition monitoring of offshore wind turbines. In Proceedings of European Wind Energy Conference & Exhibition (EWEC), Athens, Greece, 27 February–2 March 2006; pp. 647–654.
- Cameron, J.R.; Thomson, W.T.; Dow, A.B. Vibration and current monitoring for detecting airgap eccentricity in large induction motors. IEE Proc. B Electr. Power Appl. 1986, 133, 155–163. [Google Scholar] [CrossRef]
- Márquez-Domínguez, S.; Sørensen, J.D. Fatigue reliability and calibration of fatigue design factors for offshore wind turbines. Energies 2012, 5, 1816–1834. [Google Scholar] [CrossRef]
- Sørensen, J.D. Reliability assessment of wind turbines. In Proceedings of the European Safety and Reliability Conference, ESREL 2013, Amsterdam, The Netherlands, 29 September–2 October 2013.
- Lu, B.; Sharma, S. A literature review of IGBT fault diagnostic and protection methods for power inverters. IEEE Trans. Ind. Appl. 2009, 45, 1770–1777. [Google Scholar]
- Van der Woude, C.; Narasimhan, S. A study on vibration isolation for wind turbine structures. Eng. Struct. 2014, 60, 223–234. [Google Scholar] [CrossRef]
- Andersen, K.H.; Puech, A.A.; Jardine, R.J. Design for cycling loading: Piles and other foundations. In Proceedings of 18th International Conference on Soil Mechanics and Geotechnical Engineering (ICSMGE), Paris, France, 2–6 September 2013.
- Tandon, N.; Parey, A. Condition Monitoring of Rotary Machines, Condition Monitoring and Control for Intelligent Manufacturing; Springer: London, UK, 2006; pp. 109–136. [Google Scholar]
- GL Garrad Hassan. A Guide to UK Offshore Wind Operations and Maintenance. 2013. Available online: http://www.4-power.eu/media/3109/offshore-wind-guide-june-2013.pdf (accessed on 3 August 2015).
- Andrawus, J.A.; Watson, J.; Kishk, M.; Adam, A. The selection of a suitable maintenance strategy for wind turbines. Wind Eng. 2006, 30, 471–486. [Google Scholar] [CrossRef]
- Wilkinson, M.R.; Spinato, F.; Tavner, P.J. Condition monitoring of generators and other subassemblies in wind turbine drive trains. In Proceedings of International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED 2007), Cracow, Poland, 6–8 September 2007; pp. 388–392.
- Tchakoua, P.; Wamkeue, R.; Ouhrouche, M.; Slaoui-Hasnaoui, F.; Tameghe, T.A.; Ekemb, G. Wind turbine condition monitoring: State-of-the-art review, new trends, and future challenges. Energies 2014, 7, 2595–2630. [Google Scholar]
- Guo, P.; Bai, N. Wind turbine gearbox condition monitoring with AAKR and moving window statistic methods. Energies 2011, 4, 2077–2093. [Google Scholar] [CrossRef]
- Mobley, R.K. An Introduction to Predictive Maintenance, 2nd ed.; Heinemann: Butterworth, NH, USA, 2006. [Google Scholar]
- Faiz, J.; Ojaghi, M. Different indexes for eccentricity faults diagnosis in three-phase squirrel-cage induction motors: A review. Mechatronics 2009, 19, 2–13. [Google Scholar] [CrossRef]
- Fleming, K.; Weltman, A.; Randolph, M.; Elson, K. Piling Engineering; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Brennan, F.; Kolios, A. Structural integrity considerations for the H2Ocean multi modal wind-wave platform. In Proceedings of European Wind Energy Association (EWEA) Conference and Exhibition 2014, Barcelona, Spain, 10–13 March 2014.
- Operational and Maintenance Costs for Wind Turbines. Available online: http://www.windmeasurementinternational.com/wind-turbines/om-turbines.php (accessed on 12 March 2015).
- Renewable Energy Technologies: Cost Analysis Series; Volume 1: Power Sector Issue 5/5 Wind Power. 2012. Available online: https://www.irena.org/DocumentDownloads/Publications/RE_Technologies_Cost_Analysis-WIND_POWER.pdf (accessed on 3 August 2015).
- Staffell, I.; Green, R. How does wind farm performance decline with age? Renew. Energy 2014, 66, 775–786. [Google Scholar] [CrossRef]
- Muro Pereg, J.R.; Fernandez de la Hoz, J. Life Cycle Assessment of 1 kWh generated by a GAMESA Onshore Windfarm G90 2.0 Mw, Gamesa 2013. Available online: http://www.gamesacorp.com/recursos/doc/rsc/compromisos/clientes/certificaciones-ohsas-y-i/informe-analisis-ciclo-de-vida-g90-english.pdf (accessed on 1 April 2015).
- Griffith, D.T.; Yoder, N.C.; Resor, B.; White, J.; Paquette, J. Structural health and prognostics management for the enhancement of OWT operations and maintenance strategies. Wind Energy 2014, 17, 1737–1751. [Google Scholar] [CrossRef]
- Levitt, A.C.; Kempton, W.; Smith, A.P.; Musial, W.; Firestone, J. Pricing offshore wind power. Energy Policy 2011, 39, 6408–6421. [Google Scholar] [CrossRef]
- Musial, W.; Ram, B. Large-Scale Offshore Wind Energy for the United State: Assessment of Opportunities and Barriers; No. NREL/TP-500-40745; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2010. [Google Scholar]
- Griffith, D.T.; Yoder, N.C.; Resor, B.; White, J.; Paquette, J.; Ogilvie, A.; Peters, V. Prognostic control to enhance offshore wind turbine operation and maintenance strategies. In Proceedings of European Wind Energy Conference (EWEA) Annual Event, Copenhagen, Denmark, 16–19 April 2012.
- Besnard, F.; Fischer, K.; Bertling, L. Reliability-centered asset maintenance: A step towards enhanced reliability, availability, and profitability of wind power plants. In Proceedings of IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT Europe), Gothenburg, Sweden, 11–13 October 2010.
- Amirat, Y.; Benbouzid, M.E.H.; Bensaker, B.; Wamkeue, R. Condition monitoring and fault diagnosis in wind energy conversion systems: A review. In Proceedings of 2007 IEEE International Electric Machines and Drives Conference, Antalya, Turkey, 3–5 May 2007; pp. 1434–1439.
- Ciang, C.C.; Lee, J.R.; Bang, H.J. Structural health monitoring for a wind turbine system: A review of damage detection methods. Meas. Sci. Technol. 2008, 19, 1–20. [Google Scholar] [CrossRef]
- Offshore Wind, Onshore Jobs: A New Industry for Britain; Energy for Sustainable Development (ESD) Ltd for Greenpeace, UK. 2009. Available online: http://www.greenpeace.org.uk/MultimediaFiles/Live/FullReport/6702.pdf (accessed on 3 August 2015).
- Tsai, L. An Integrated Assessment of Offshore Wind Farm Siting: A Case Study in the Great Lakes of Michigan. PhD Thesis, University of Michigan, Ann Arbor, MI, USA, 2013. [Google Scholar]
- Aakre, D.; Hangen, R. Wind Turbine Considerations for Landowners, NDSU Extension Service, North Dakota State University. 2009. Available online: http://www.ag.ndsu.edu/pubs/agecon/market/ec1394.pdf (accessed on 12 March 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luengo, M.M.; Kolios, A. Failure Mode Identification and End of Life Scenarios of Offshore Wind Turbines: A Review. Energies 2015, 8, 8339-8354. https://doi.org/10.3390/en8088339
Luengo MM, Kolios A. Failure Mode Identification and End of Life Scenarios of Offshore Wind Turbines: A Review. Energies. 2015; 8(8):8339-8354. https://doi.org/10.3390/en8088339
Chicago/Turabian StyleLuengo, Maria Martinez, and Athanasios Kolios. 2015. "Failure Mode Identification and End of Life Scenarios of Offshore Wind Turbines: A Review" Energies 8, no. 8: 8339-8354. https://doi.org/10.3390/en8088339
APA StyleLuengo, M. M., & Kolios, A. (2015). Failure Mode Identification and End of Life Scenarios of Offshore Wind Turbines: A Review. Energies, 8(8), 8339-8354. https://doi.org/10.3390/en8088339