
Development of a Compensation Scheme for a Measurement Voltage Transformer Using the Hysteresis Characteristics of a Core



Abstract
:1. Introduction
2. Proposed Compensation Scheme of a Measurement VT
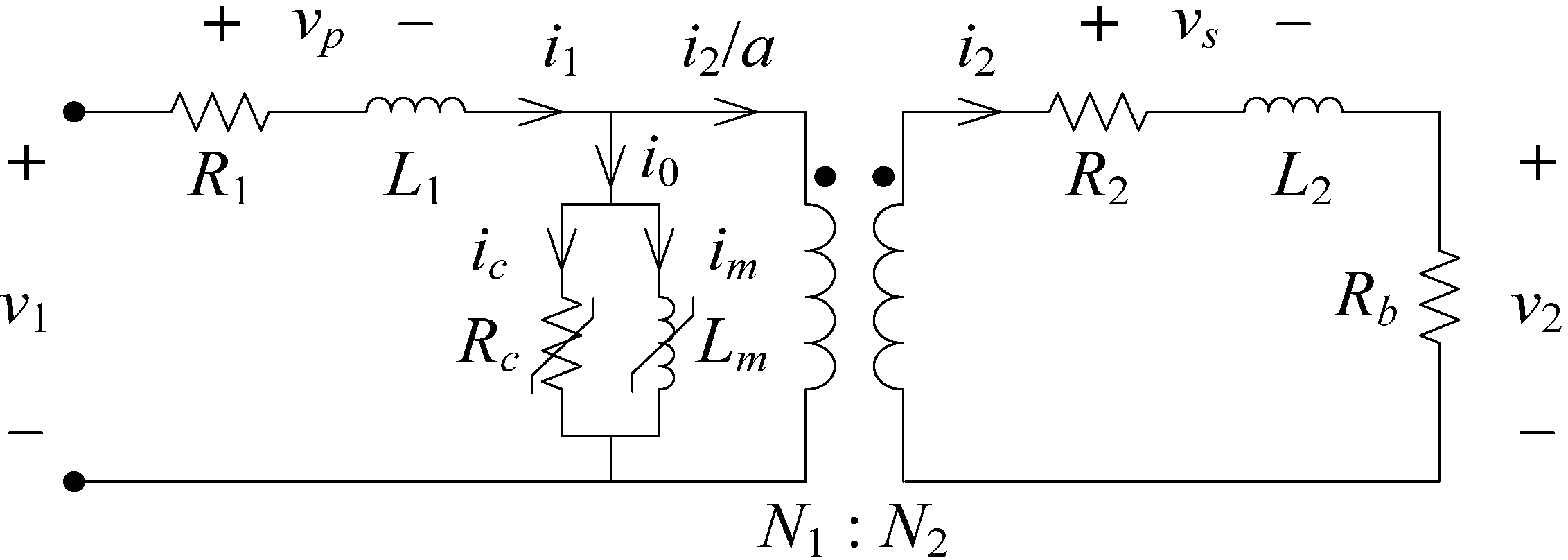
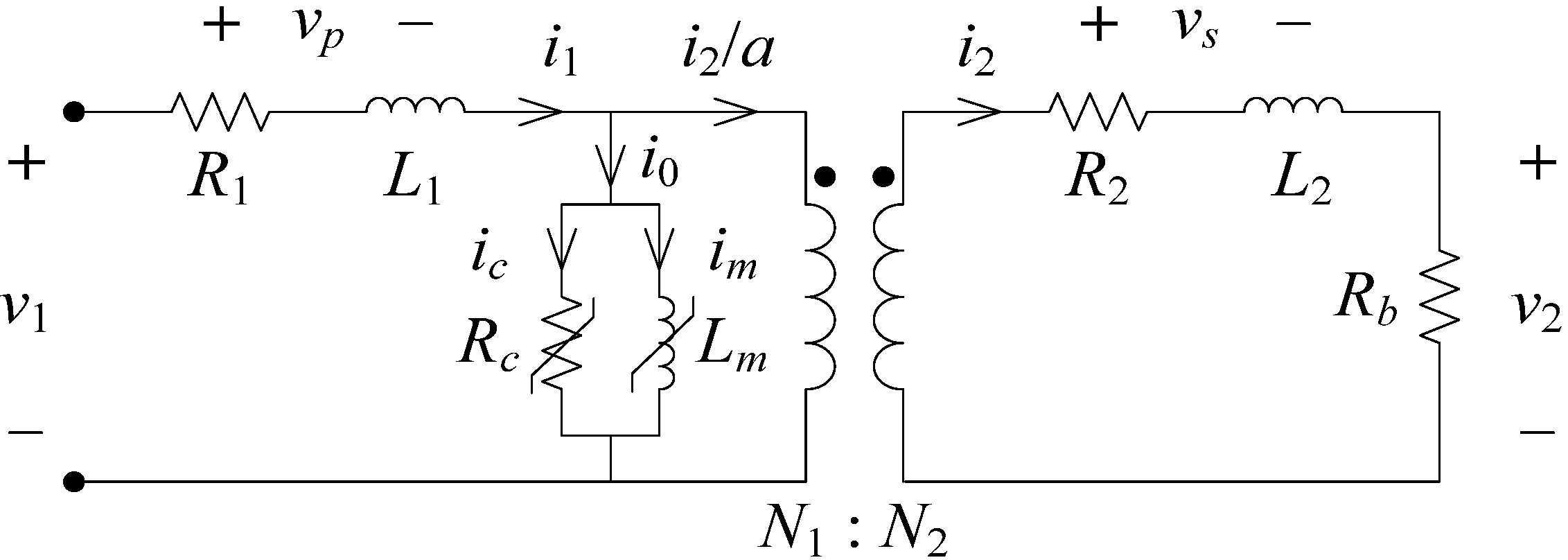
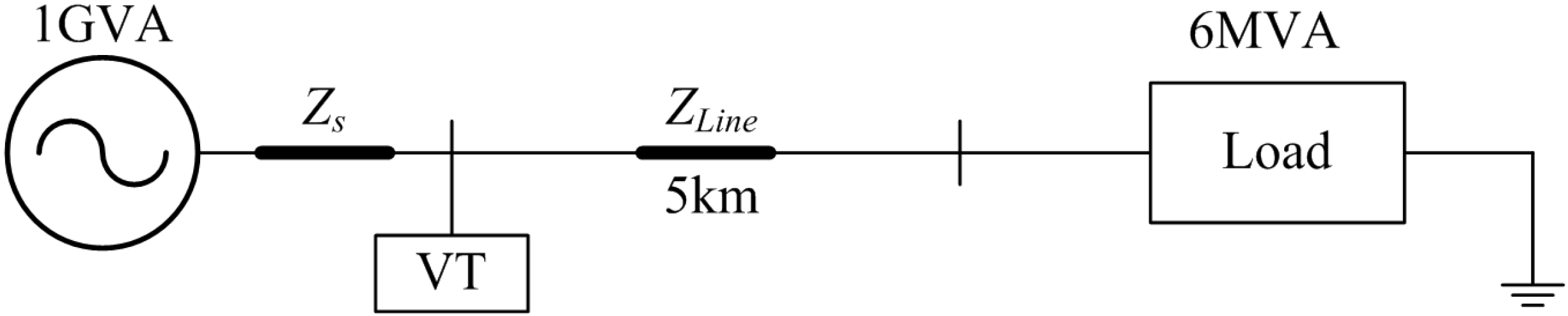
2.1. Equivalent Circuit of a VT
2.2. Proposed Compensation Scheme of a VT
2.2.1. Secondary Winding Voltage (vs)
2.2.2. Primary Winding Voltage (vp)

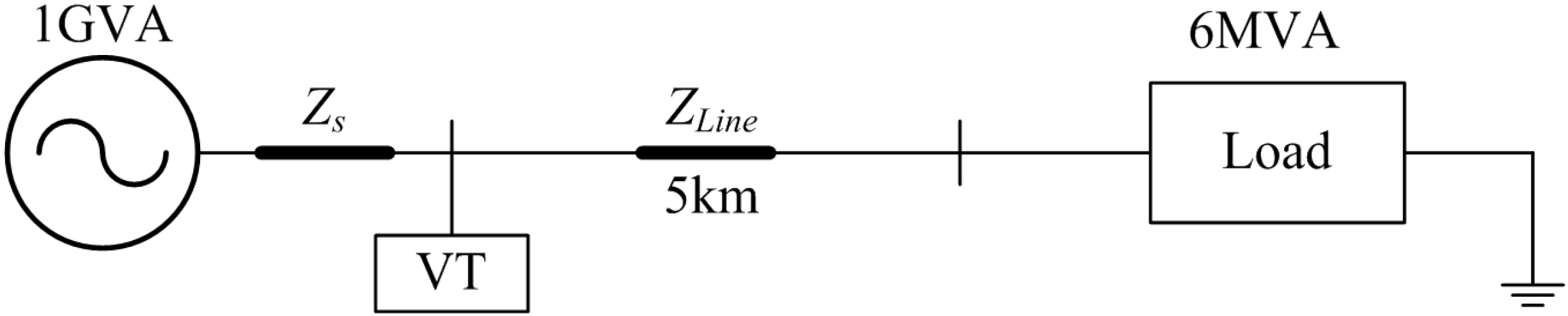
3. Case Studies

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accuracy Class | Ratio Error (%) | Phase Error (min) |
|---|---|---|
| 0.1 | 0.1 | 5 |
| 0.2 | 0.2 | 10 |
| 0.5 | 0.5 | 20 |
| 1.0 | 1.0 | 40 |
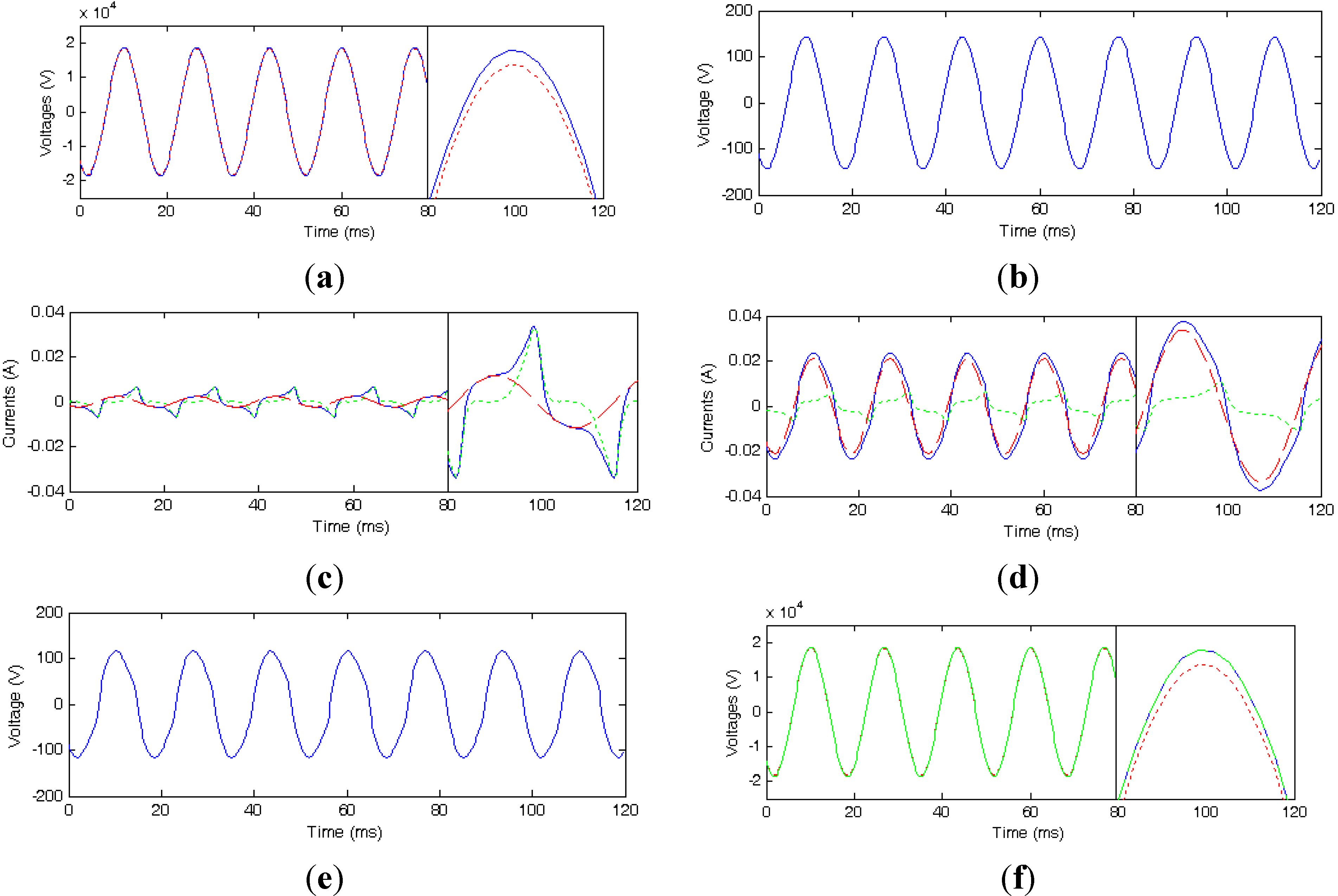
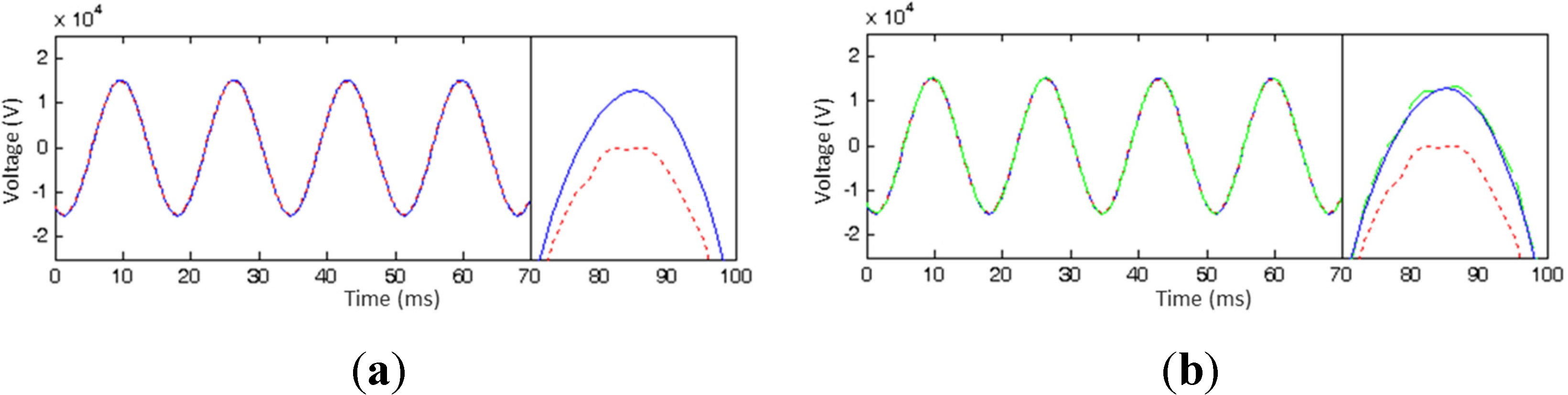
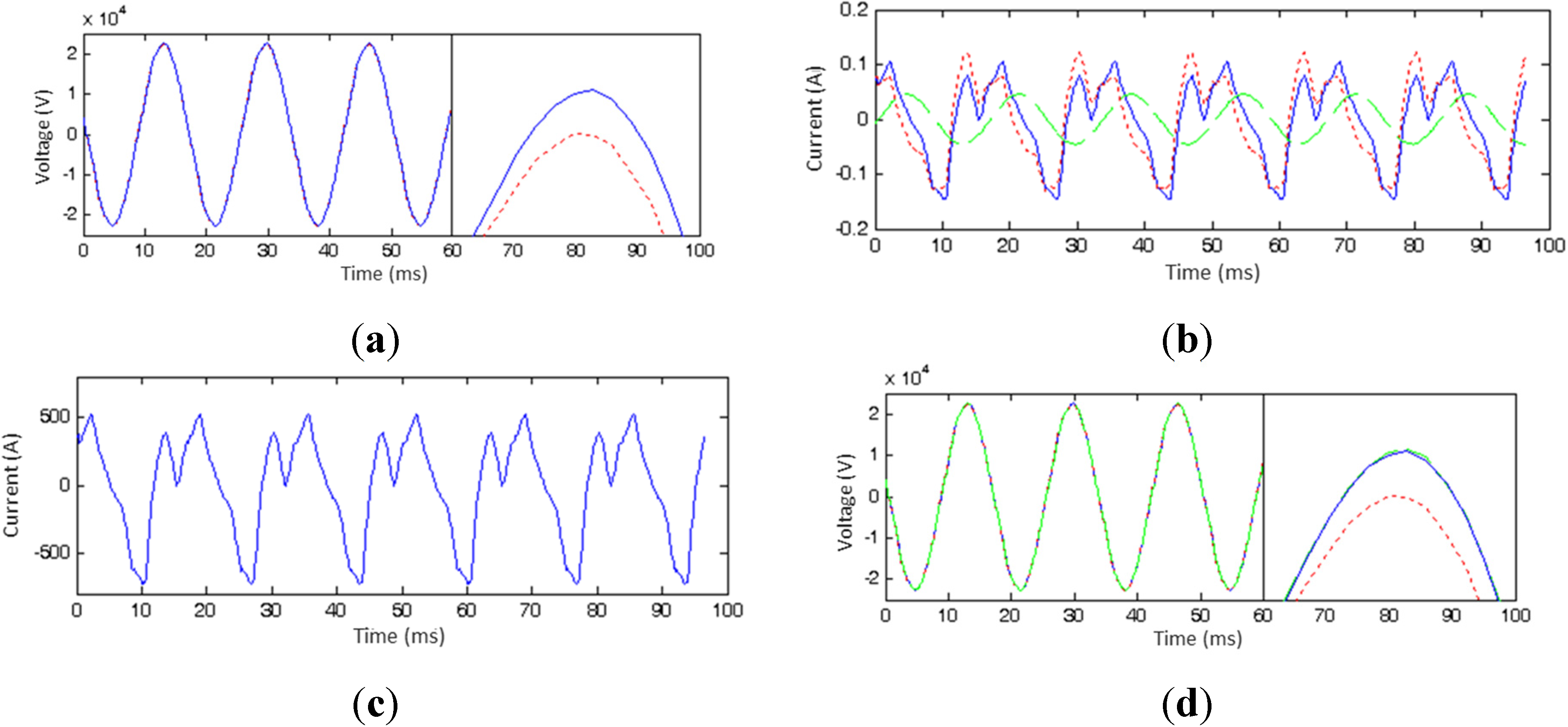
3.1. Case 1: 120% of the Rated Voltage
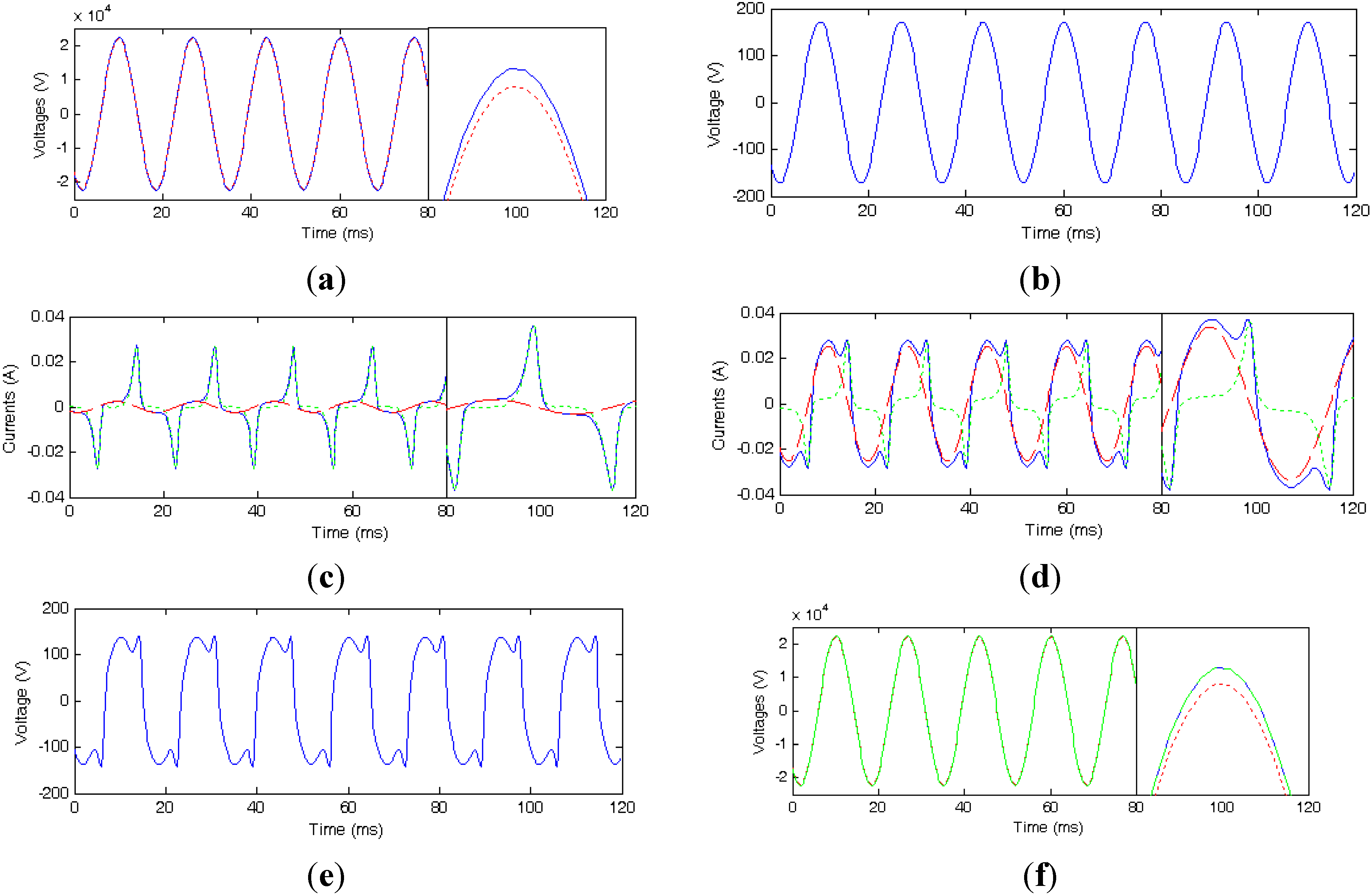
| Error | Measured Voltage | Compensated Voltage |
|---|---|---|
| Ratio error (%) | –1.422 | 0.0002 |
| Phase error (min) | 7.732 | –0.1 |
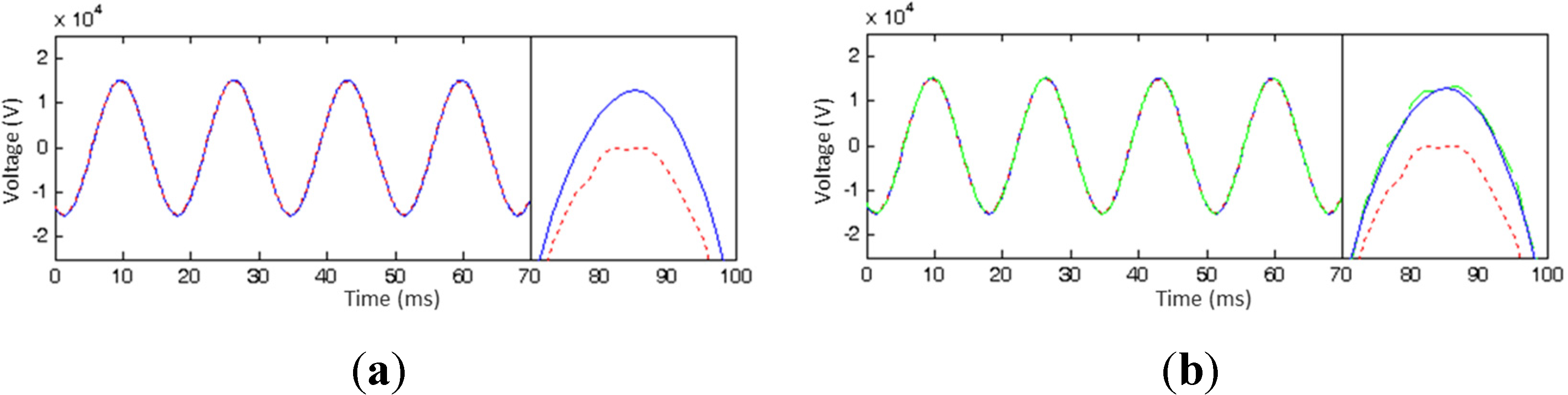
3.2. Case 2: 100% of the Rated Voltage
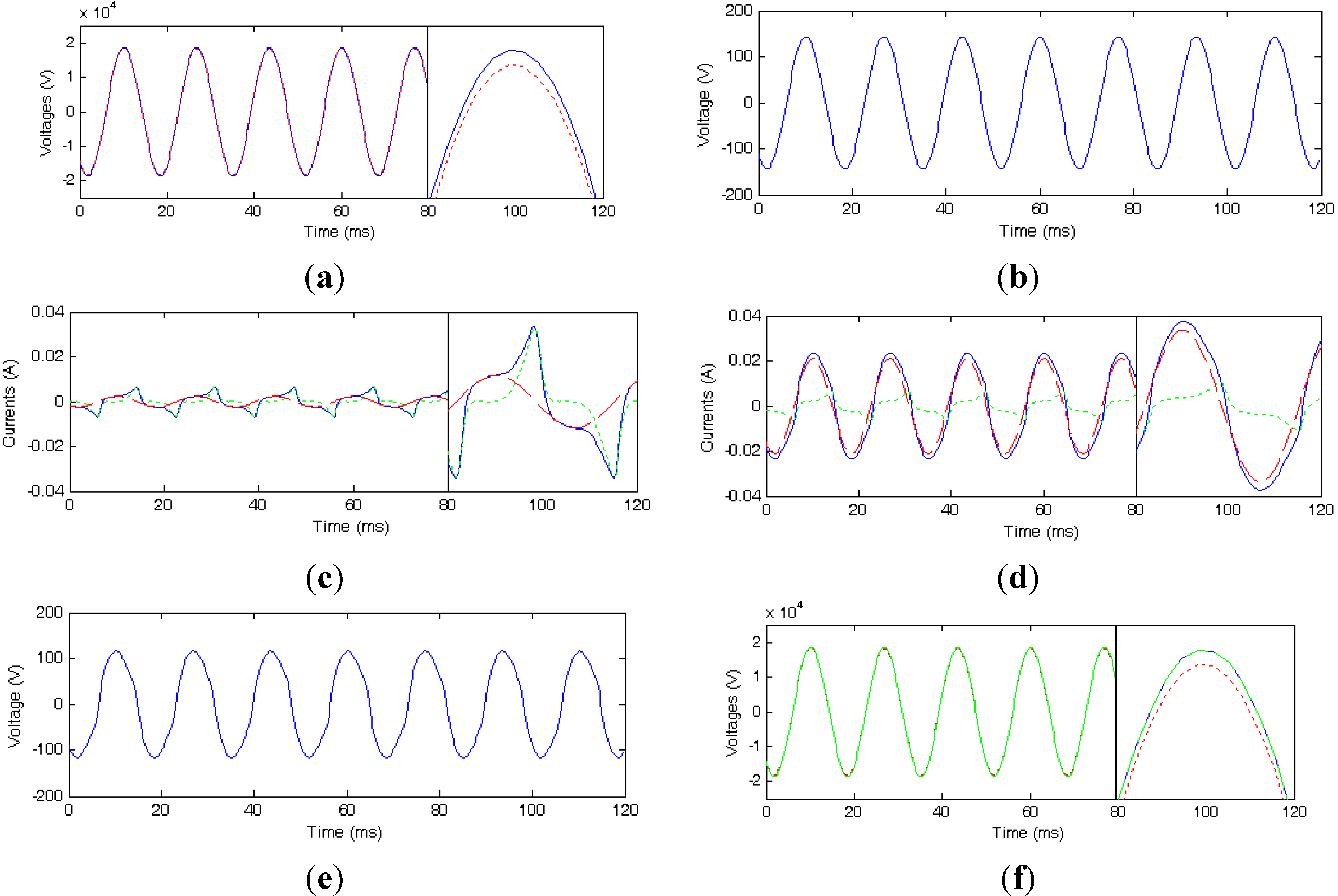
| Error | Measured Voltage | Compensated Voltage |
|---|---|---|
| Ratio error (%) | –1.414 | 0.001 |
| Phase error (min) | 2.93 | –0.03 |
3.3. Case 3: 80% of the Rated Voltage
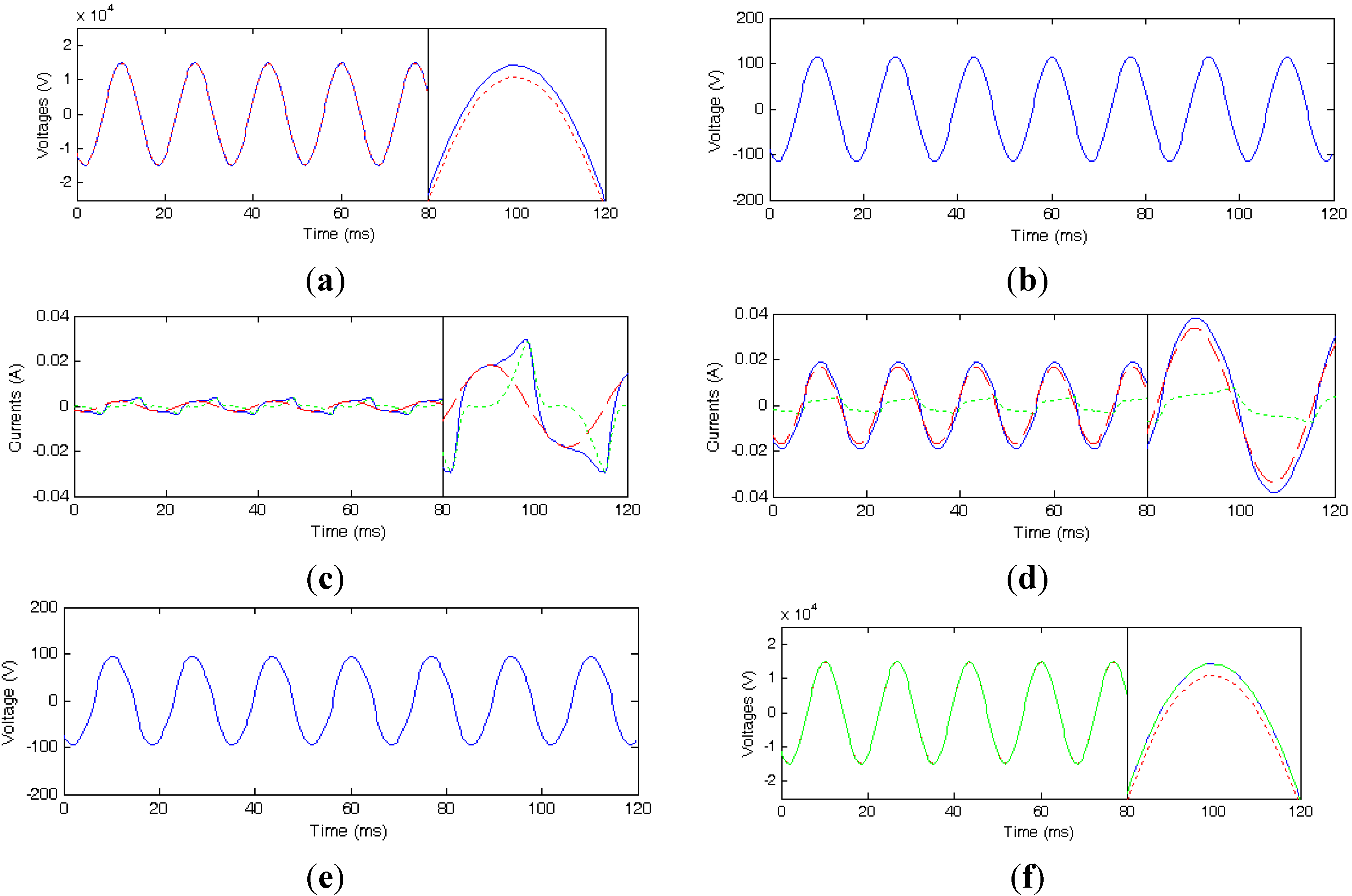
| Error | Measured Voltage | Compensated Voltage |
|---|---|---|
| Ratio error (%) | –1.424 | 0.0001 |
| Phase error (min) | 2.167 | –0.002 |
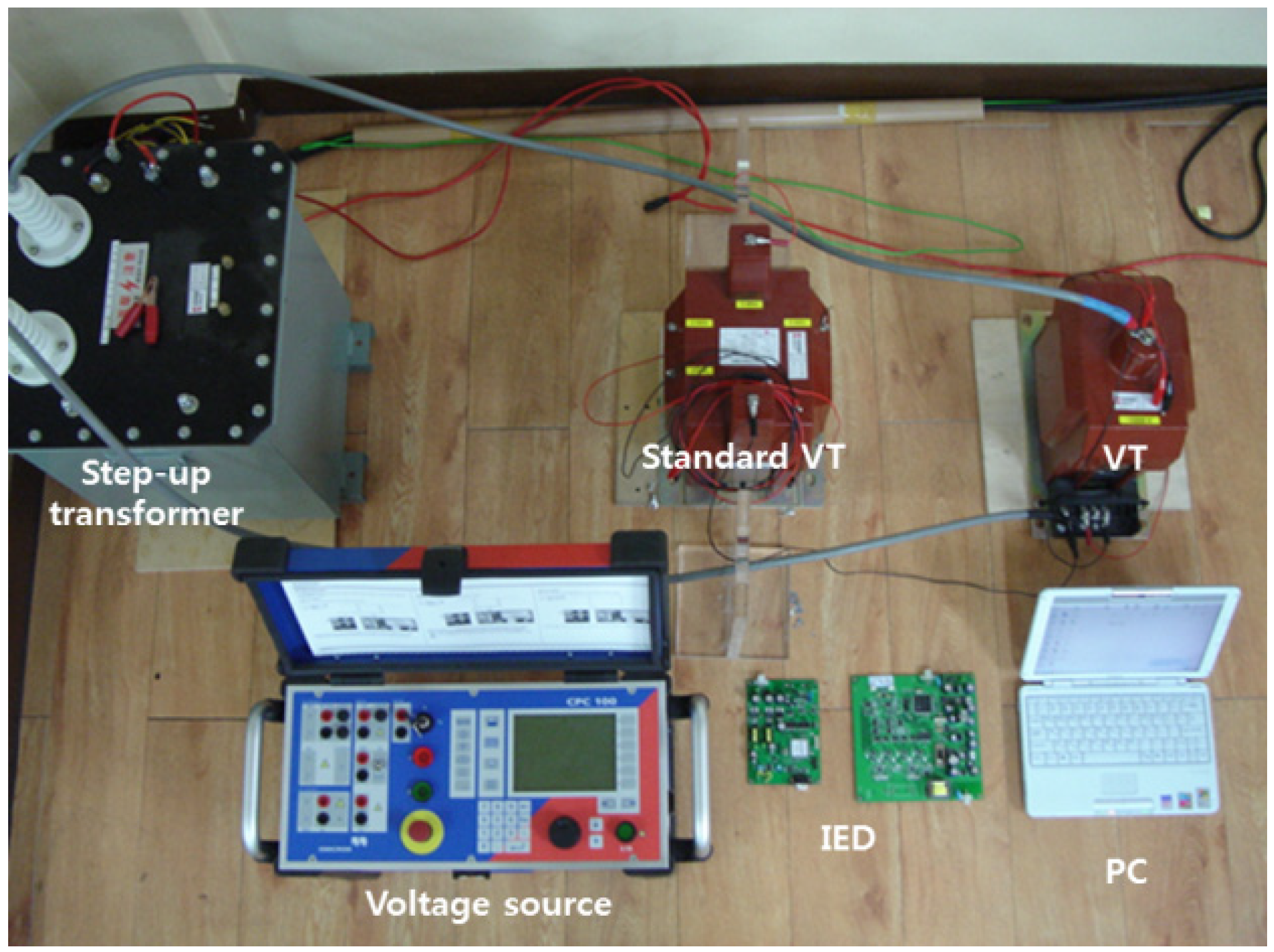
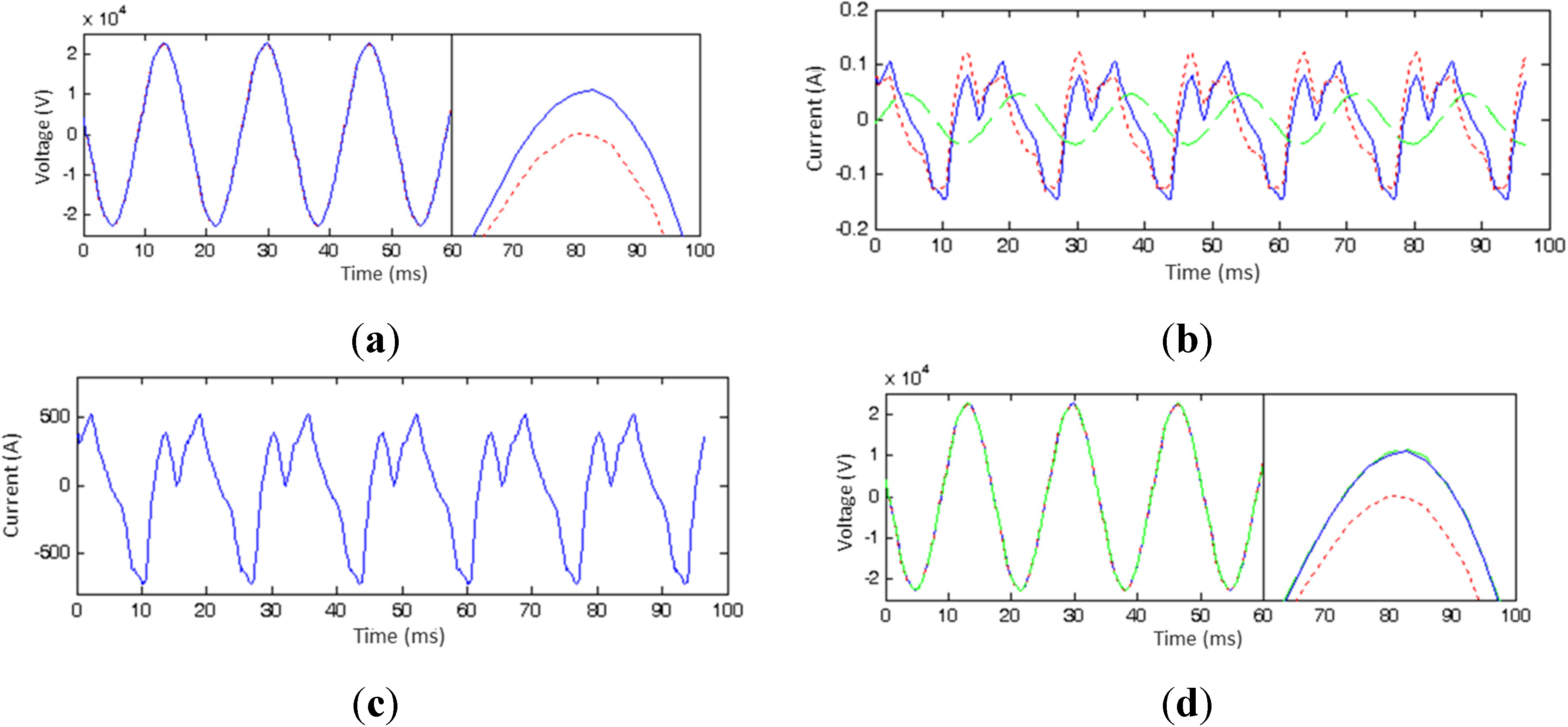
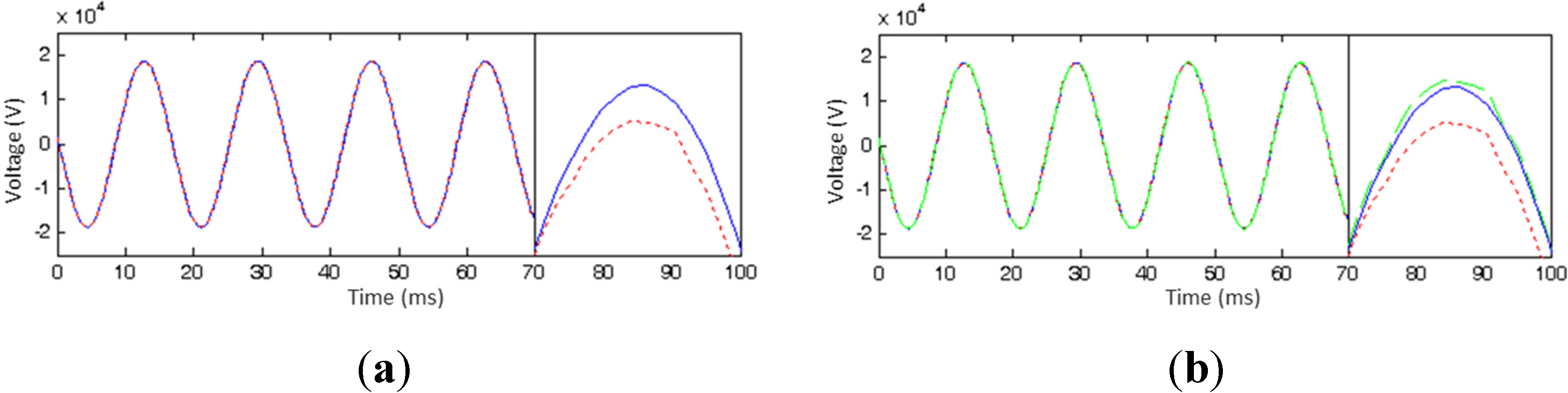
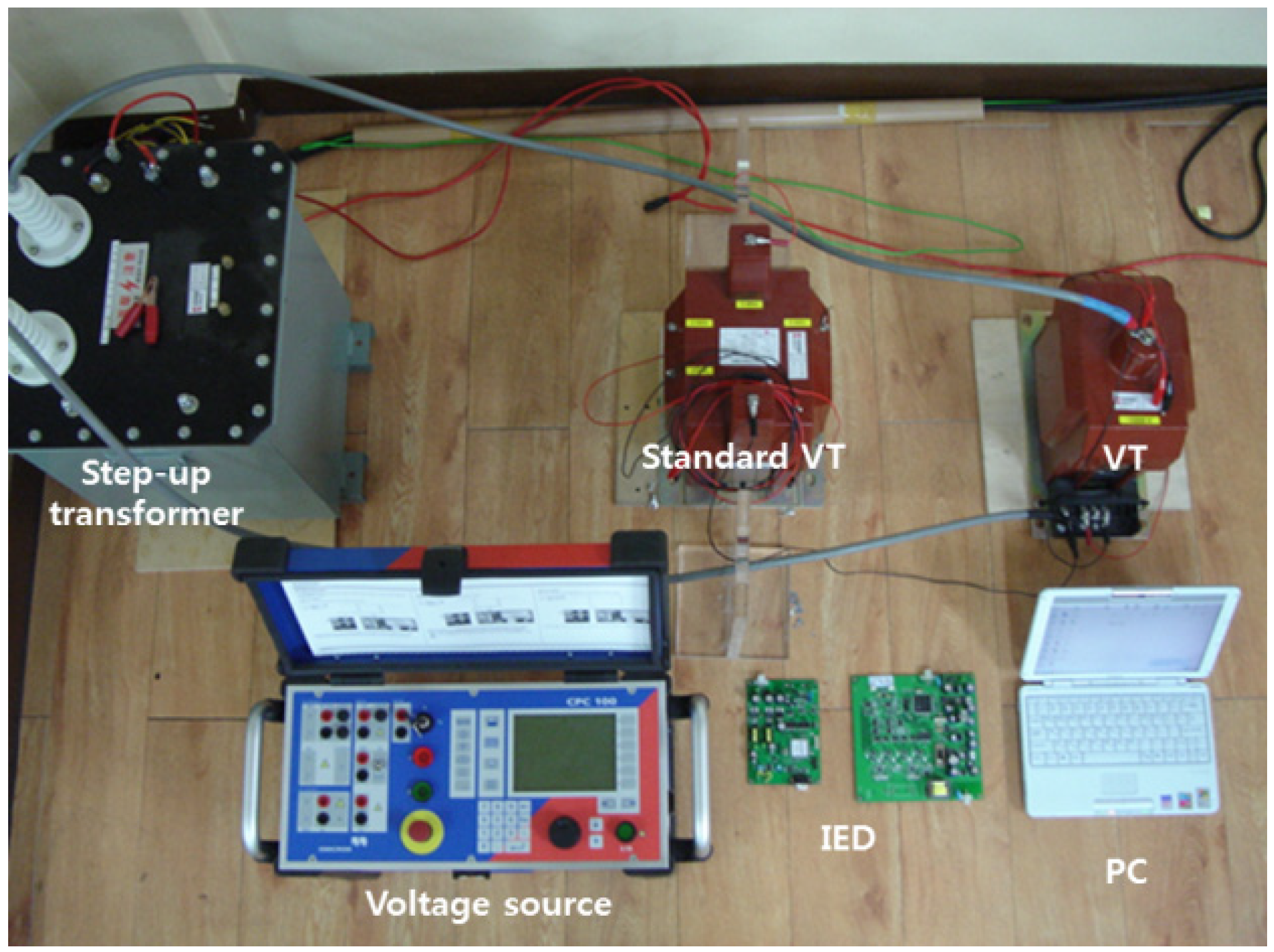
4. Experimental Test Results

| Case | Error | Measured Voltage | Compensated Voltage |
|---|---|---|---|
| 120% of the rated voltage | Ratio error (%) | 0.1997 | 0.01884 |
| Phase error (min) | 69.82 | 1.009 | |
| 100% of the rated voltage | Ratio error (%) | 0.1301 | 0.08048 |
| Phase error (min) | 65.03 | 0.2075 | |
| 80% of the rated voltage | Ratio error (%) | ‒1.758 | 0.01571 |
| Phase error (min) | 64.38 | 0.3567 |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- International Electrotechnical Commission (IEC). International standard IEC 60044–7: “Instrument transformer—Part 7: Electronic Voltage Transformers”. IEC: Geneva, Switzerland, 1999. [Google Scholar]
- IEEE Power Engineering Society. IEEE Std.. C57.13-2008: IEEE standard requirements for instrument transformers. Available online: http://ieeexplore.ieee.org/xpl/articleDetails.jsp?arnumber=4581634 (accessed on 20 April 2015).
- IEEE Power Engineering Society. IEEE Std.. C57.13.6-2005: IEEE standard for high-accuracy instrument transformers. Available online: http://ieeexplore.ieee.org/servlet/opac?punumber=10453 (accessed on 20 April 2015).
- Slomovitz, D. Electronic compensation of voltage transformer. IEEE Trans. Instrum. Meas. 1988, 37, 652–654. [Google Scholar] [CrossRef]
- Slomovitz, D. Electronic based high-voltage measuring transformer. IEEE Trans. Power Deliv. 2002, 17, 359–361. [Google Scholar] [CrossRef]
- Kang, Y.C.; Zheng, T.Y.; Kim, Y.H.; Lee, B.E.; So, S.H.; Crossley, P.A. Development of compensation algorithm for a measurement current transformer. IET Gener. Trans. Distr. 2011, 5, 531–539. [Google Scholar]
- Terashima, K.; Wada, K.; Shimizu, T.; Nakazawa, T.; Ishii, K.; Hayashi, Y. Evaluation of the iron loss of an inductor based on dynamic minor characteristics. In Proceedings of the Power Electronics and Applications, 2007 European Conference, Dresden, Germany, 2–5 September 2007; pp. 1–8.
- Kang, Y.C.; Park, J.K.; Kang, S.H.; Johns, A.T.; Aggarwal, R.K. An algorithm for compensating secondary currents of current transformers. IEEE Trans. Power Deliv. 1997, 12, 116–124. [Google Scholar] [CrossRef]
- Kezunovic, M.; Kojovic, L.; Abur, A.; Fromen, C.W.; Sevcik, D.R.; Phillips, F. Experimental evaluation of EMTP-based current transformer models for protective relay transient study. IEEE Trans. Power Deliv. 1994, 9, 405–413. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.; Park, J.-M.; Hur, K.; Kang, Y.C. Development of a Compensation Scheme for a Measurement Voltage Transformer Using the Hysteresis Characteristics of a Core. Energies 2015, 8, 3245-3257. https://doi.org/10.3390/en8043245
Lee H, Park J-M, Hur K, Kang YC. Development of a Compensation Scheme for a Measurement Voltage Transformer Using the Hysteresis Characteristics of a Core. Energies. 2015; 8(4):3245-3257. https://doi.org/10.3390/en8043245
Chicago/Turabian StyleLee, Hyewon, Jong-Min Park, Kyeon Hur, and Yong Cheol Kang. 2015. "Development of a Compensation Scheme for a Measurement Voltage Transformer Using the Hysteresis Characteristics of a Core" Energies 8, no. 4: 3245-3257. https://doi.org/10.3390/en8043245
APA StyleLee, H., Park, J.-M., Hur, K., & Kang, Y. C. (2015). Development of a Compensation Scheme for a Measurement Voltage Transformer Using the Hysteresis Characteristics of a Core. Energies, 8(4), 3245-3257. https://doi.org/10.3390/en8043245