
Response Based Emergency Control System for Power System Transient Stability

Abstract
:1. Introduction
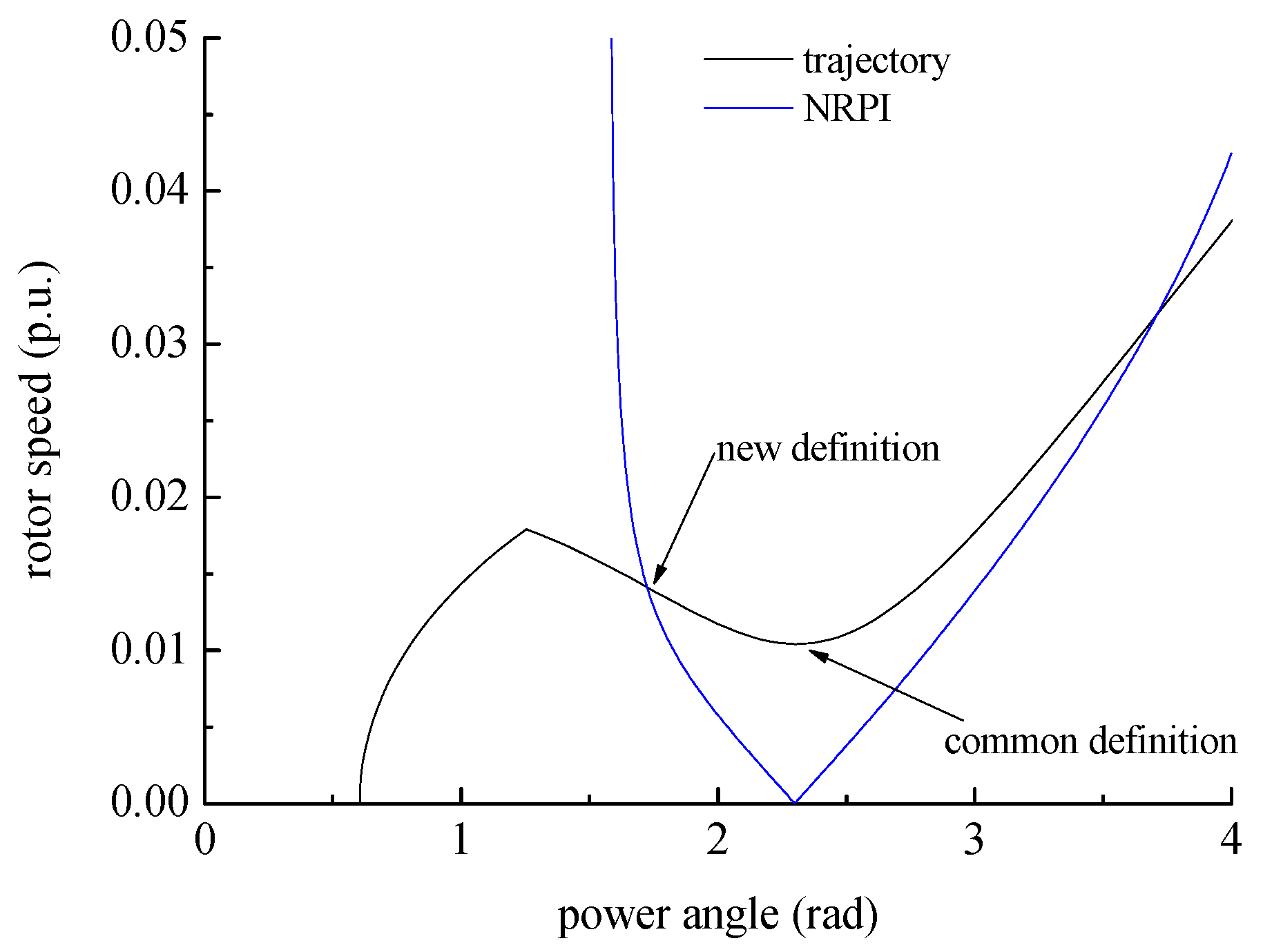
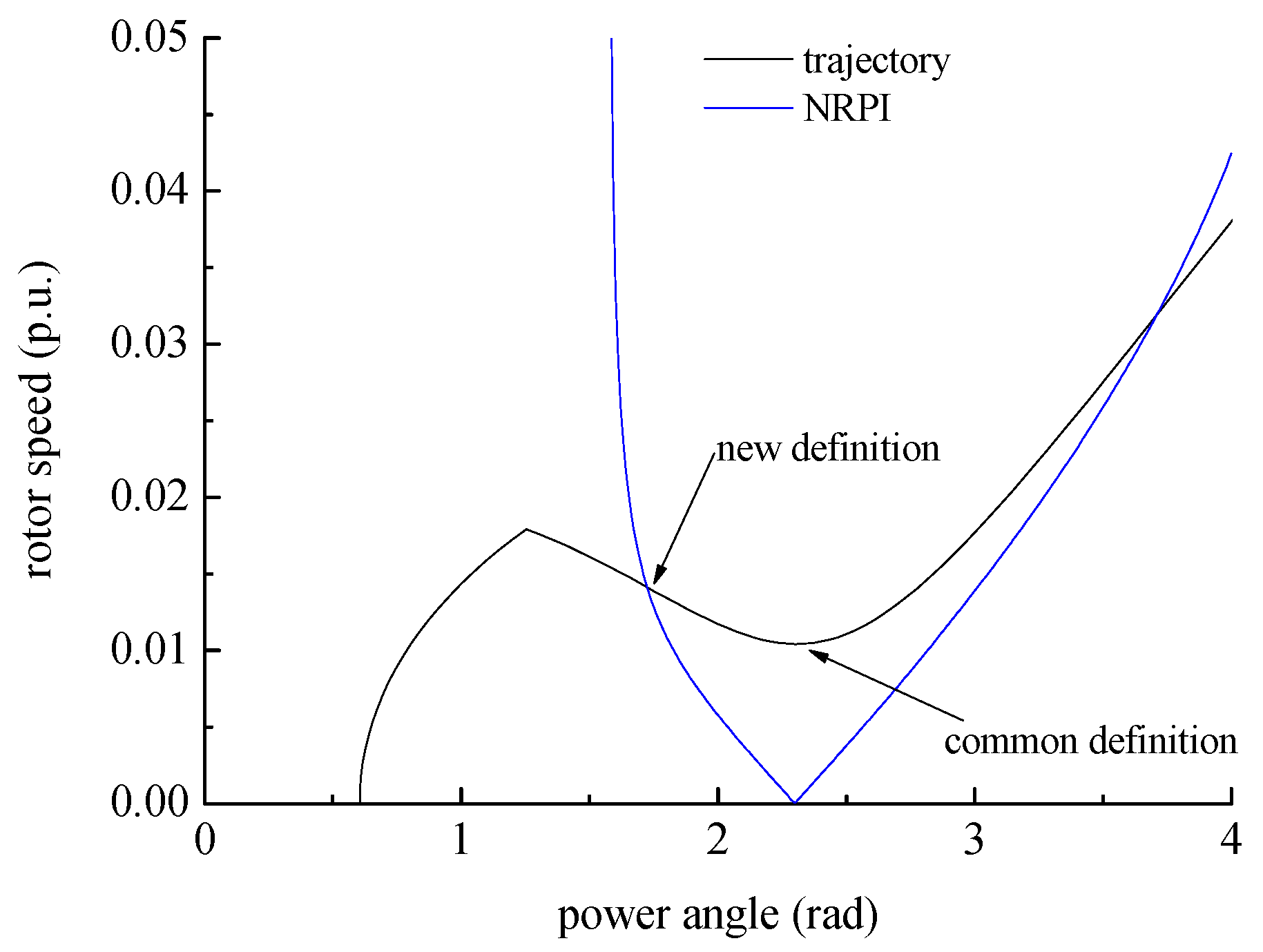
2. Instability Detection
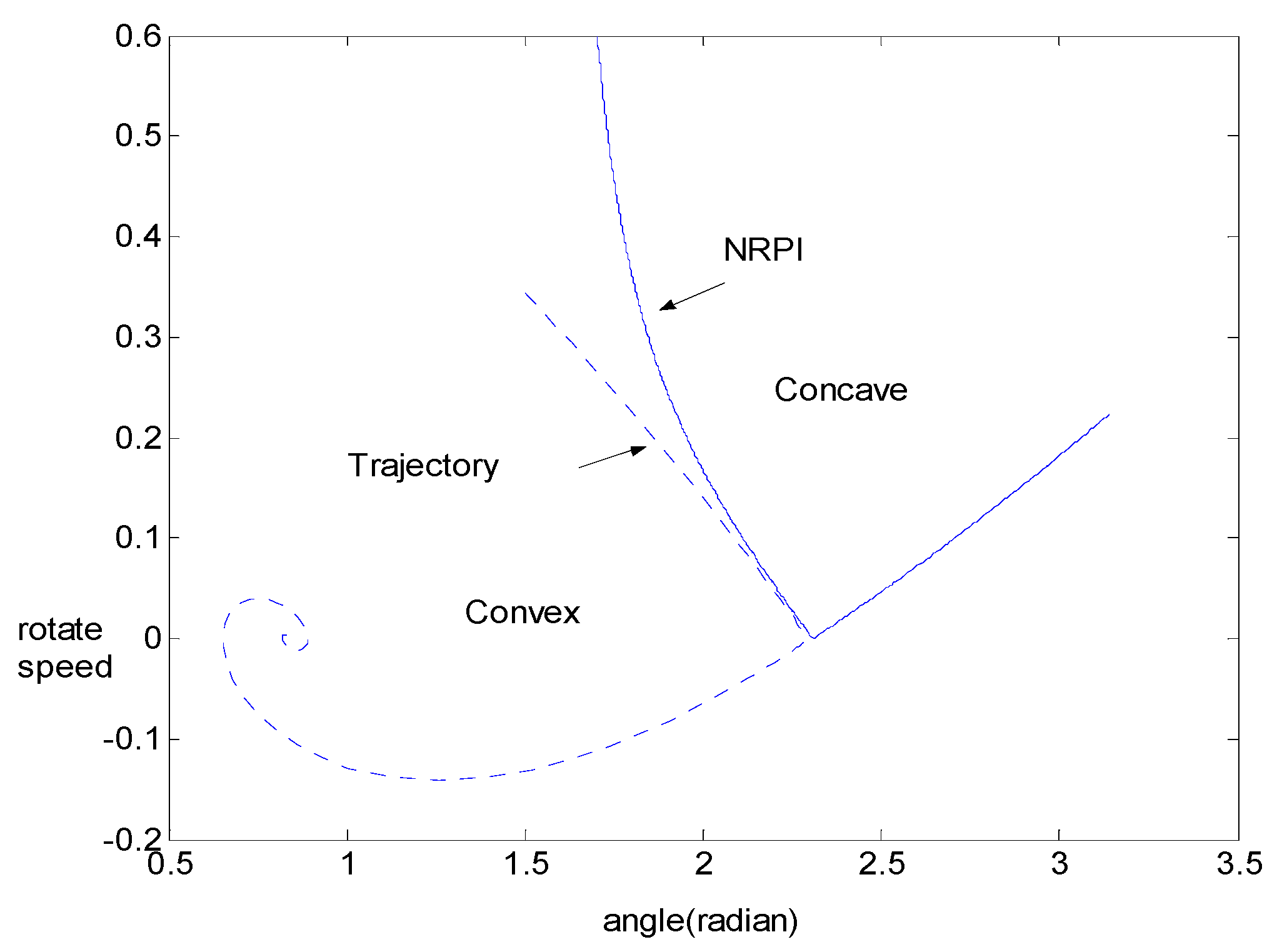
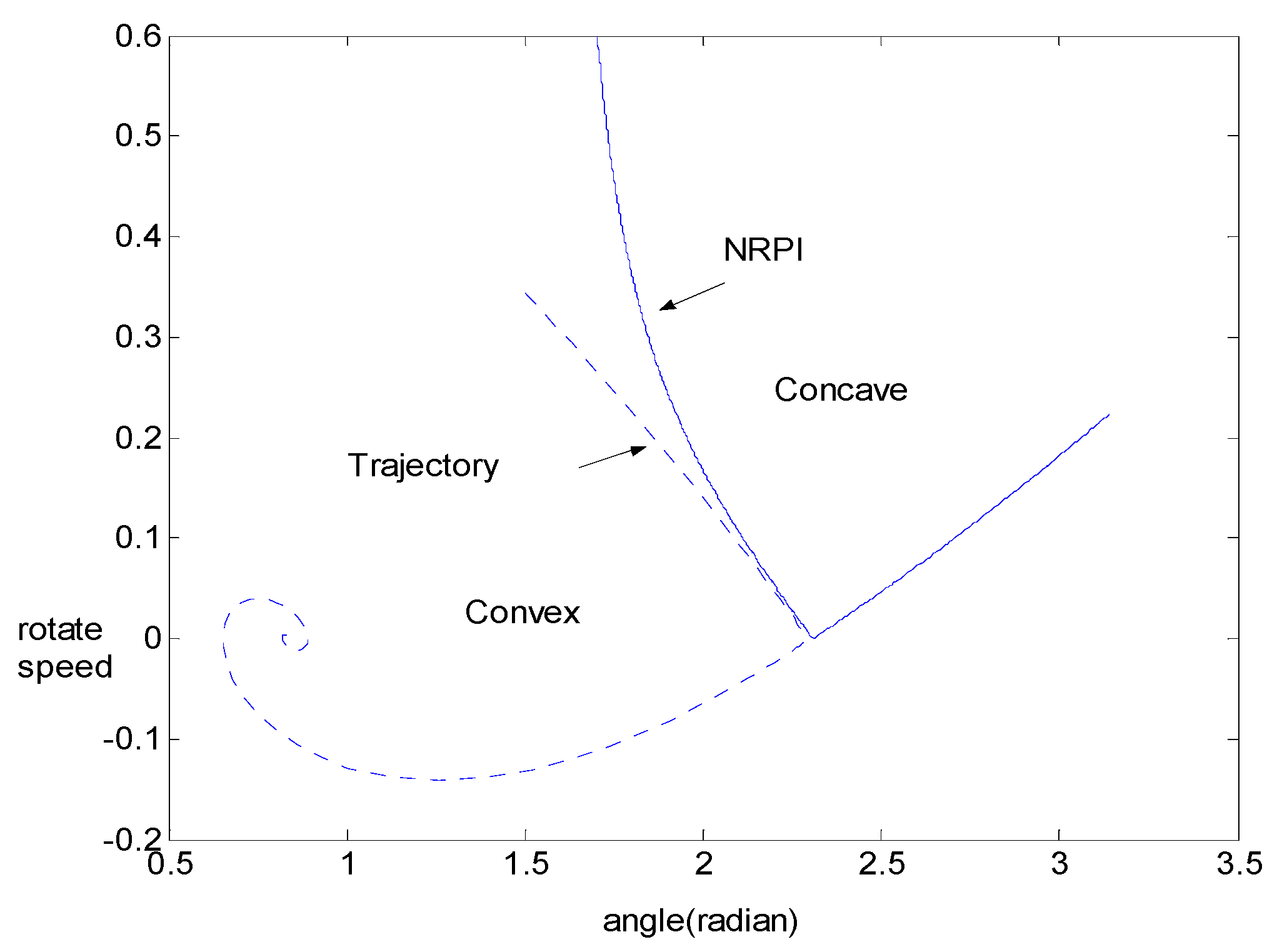
2.1. Identification Method of Transient Instability for an Autonomous SMIB System
- (1)
- The phase trajectory is convex if ;
- (2)
- The phase trajectory is concave if ;
- (3)
- The trajectory is on the inflexion point if .
2.2. Identification Theory of Transient Instability for a Non-Autonomous SMIB System
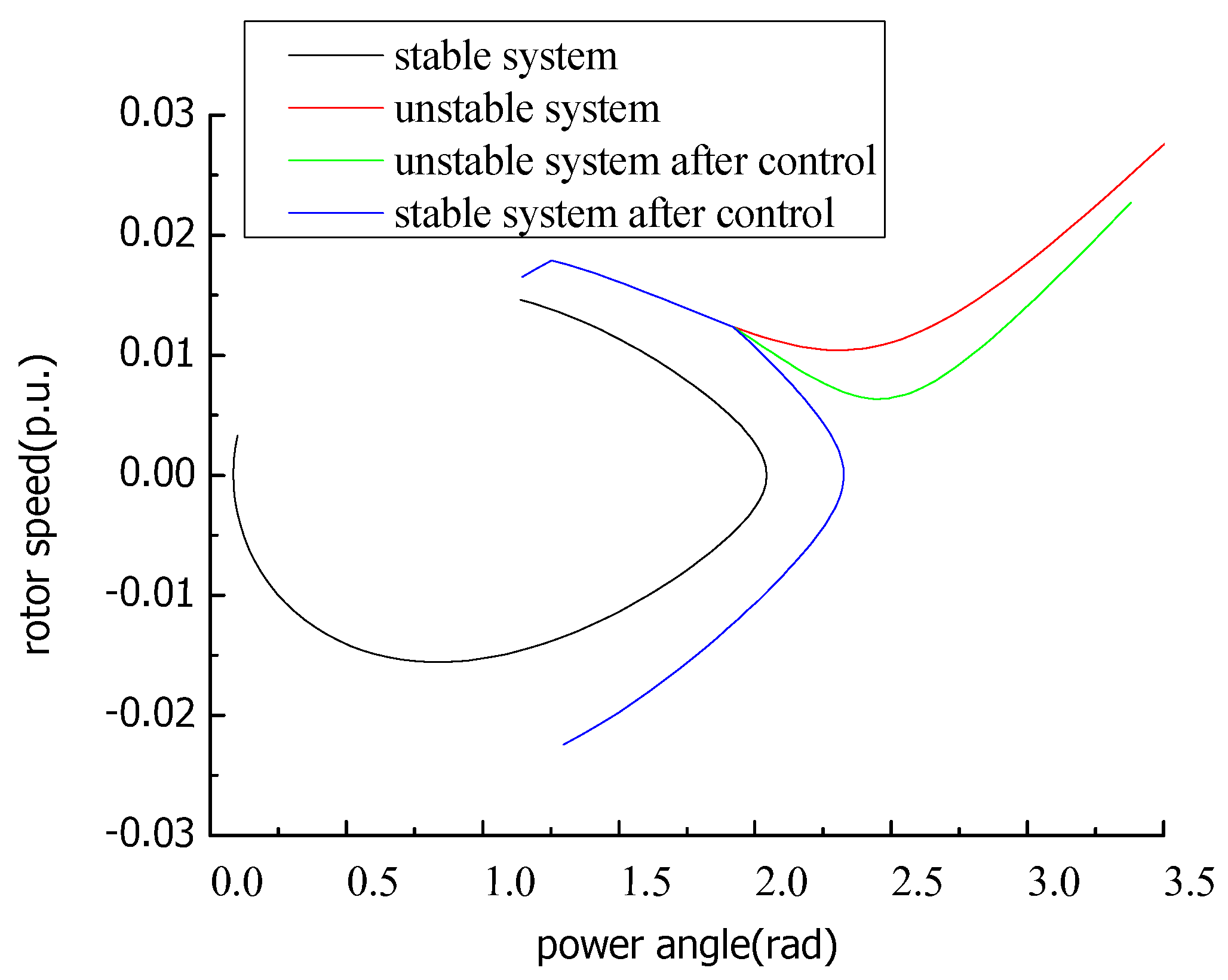
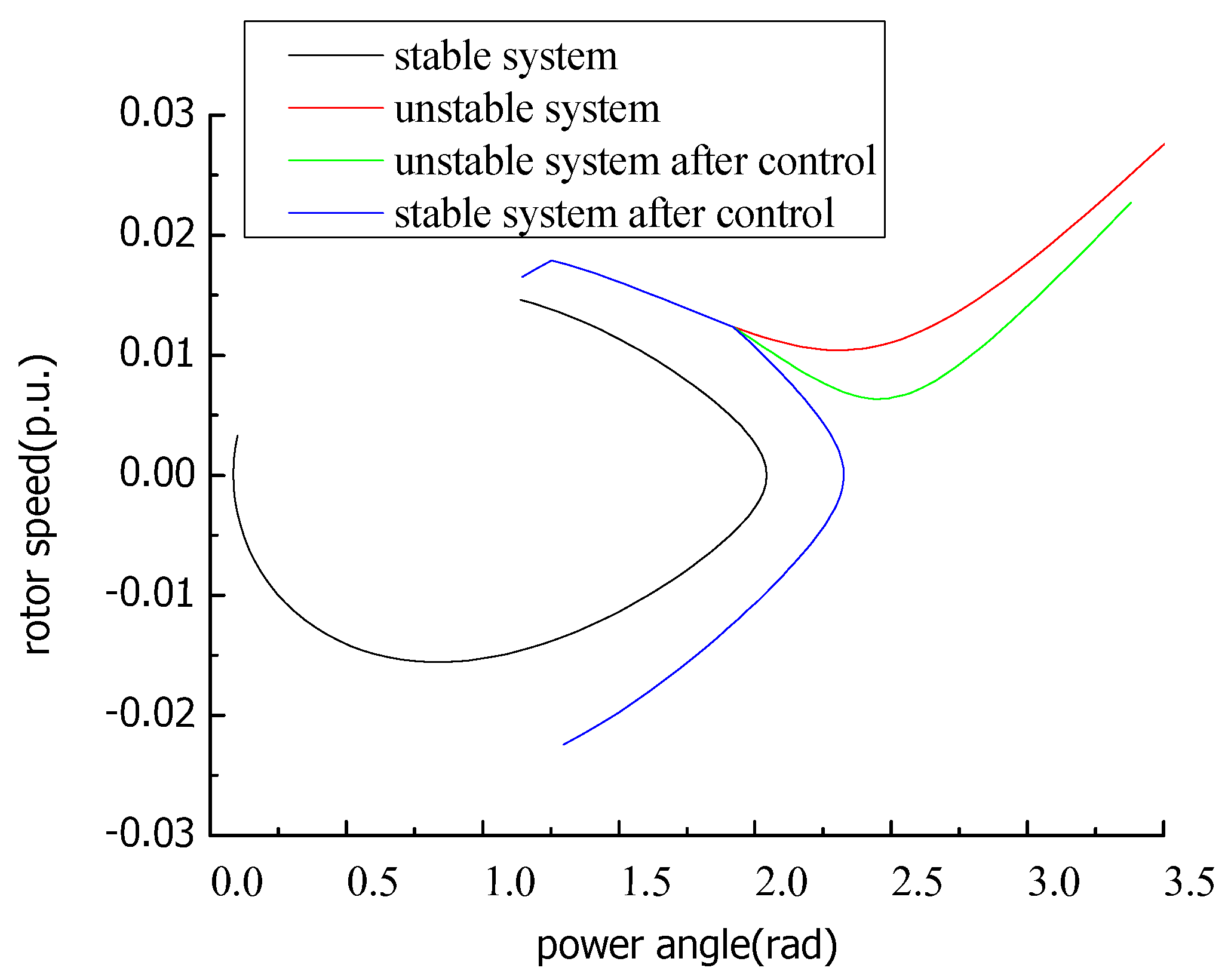
3. Control Method
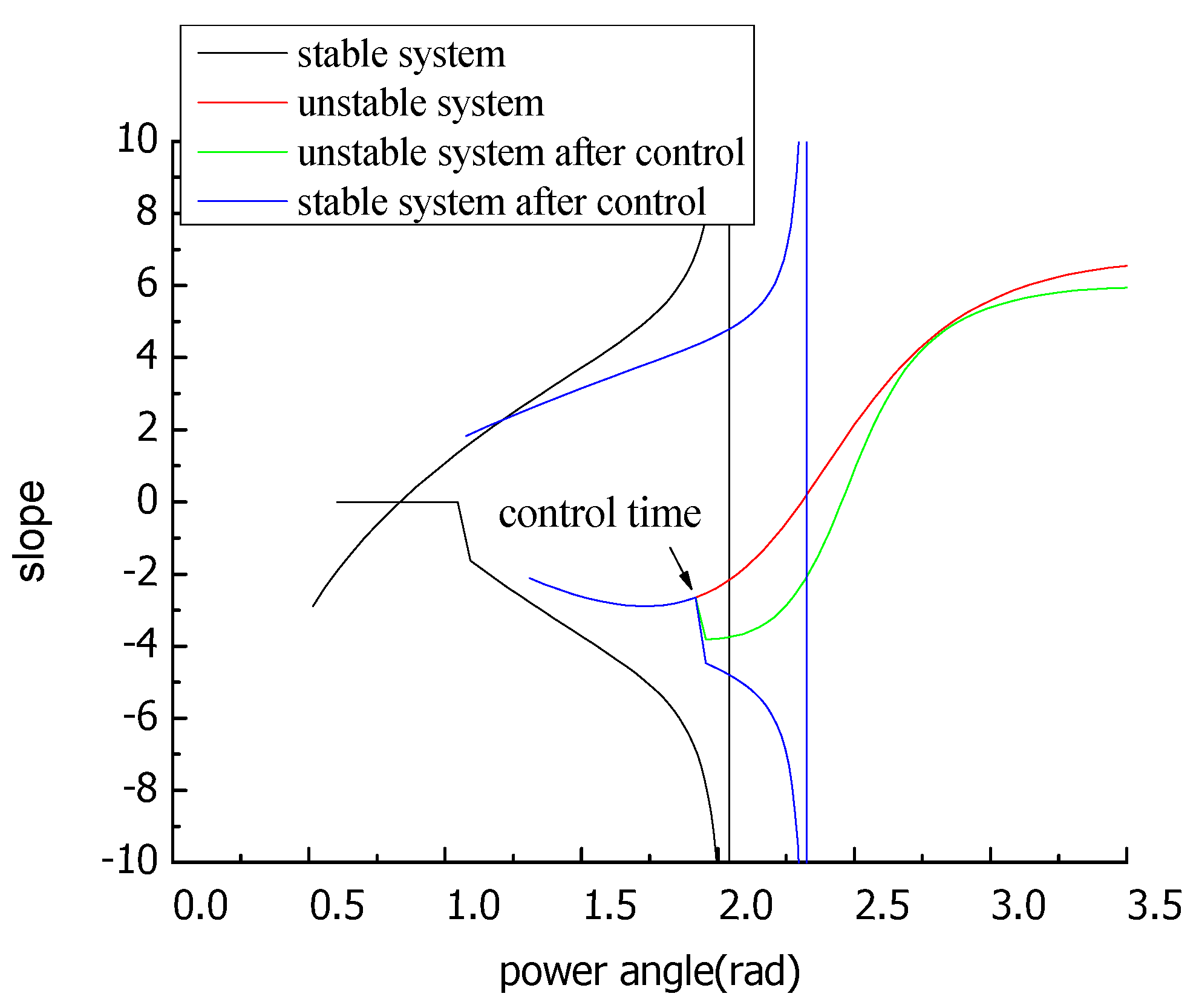
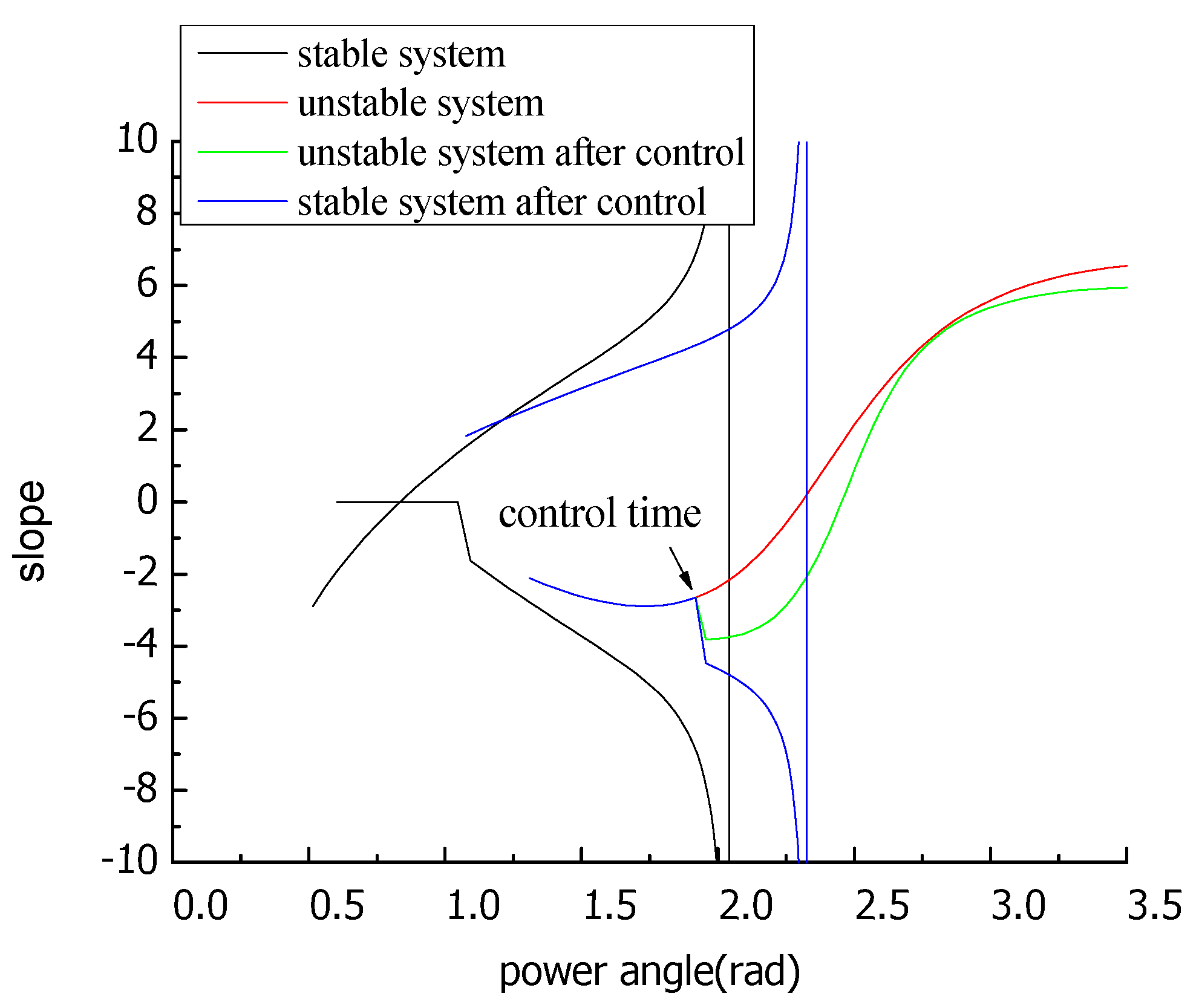
3.1. The Slope of the State-Plane Trajectory

3.2. Calculation of Control Quantity for SMIB
3.3. Approximation Method to Calculate Control Quantity
3.4. Seeking for FEP
- (1)
- Obtain the prediction curve of the electrical power;
- (2)
- Preset zero to the generator shedding ratio and UPE: , ;
- (3)
- Mechanical power decreases at the same ratio:
- (4)
- Search for the power equilibrium point as ;
- (5)
- Acquire the according to the ;
- (6)
- If , complete the iterator; or return to step 3.
3.5. Control Method for Multi-Machine System
4. Simulation Result
4.1. SMIB System

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameters |
|---|---|
| The initial state | , , |
| The generator | , , , , , , , |
| The transmission line |
| The Moment of Fault-Clearing | Simulation Results | Detection Results | The Moment of Instability Detected | The Angle of Instability Detected |
|---|---|---|---|---|
| 0.17 s | Stable | Stable | \ | \ |
| 0.18 s | Stable | Stable | \ | \ |
| 0.187 s | Stable | Stable | \ | \ |
| 0.188 s | Unstable | Unstable | 0.56 s | 121.9° |
| 0.19 s | Unstable | Unstable | 0.46 s | 114.9° |
| 0.20 s | Unstable | Unstable | 0.37 s | 106.2° |
| 0.21 s | Unstable | Unstable | 0.34 s | 102.9° |
| 0.22 s | Unstable | Unstable | 0.33 s | 102.8° |
| The Moment of Fault-Clearing | Simulation Results | The Moment of Instability Detected | The Angle of Instability Detected | The Moment of Angle Reach the Threshold of 180° |
|---|---|---|---|---|
| 0.17 s | Stable | Stable | - | - |
| 0.18 s | Stable | Stable | - | - |
| 0.187 s | Stable | Stable | - | - |
| 0.188 s | Unstable | 0.56 s | 121.9° | 1.44 s |
| 0.19 s | Unstable | 0.46 s | 114.9° | 1.14 s |
| 0.20 s | Unstable | 0.38 s | 108.5° | 0.86 s |
| 0.21 s | Unstable | 0.34 s | 102.9° | 0.76 s |
| 0.22 s | Unstable | 0.34 s | 105.6° | 0.68 s |
| Fault-Clearing Time | Distinction Time | Calculated Minimum Control Quantity (%) | Real Minimum Control Quantity (%) |
|---|---|---|---|
| 0.18 s | None (stable) | None (stable) | None (stable) |
| 0.19 s | 0.46 s | 5.61 | 4.55 |
| 0.20 s | 0.37 s | 14.1 | 13.5 |
| 0.21 s | 0.34 s | 22.4 | 20.6 |
| 0.22 s | 0.33 s | 30.1 | 28.4 |
| Fault-Clearing Time | Distinction Time | Calculated Controlled Quantity (%) | Real FEP after Control |
|---|---|---|---|
| 0.18 s | None (stable) | None (stable) | None (stable) |
| 0.19 s | 0.46 s | 8.91 | 129.1° |
| 0.20 s | 0.37 s | 18.6 | 126.8° |
| 0.21 s | 0.34 s | 22.5 | 128.1° |
| 0.22 s | 0.33 s | 35.6 | 128.8° |
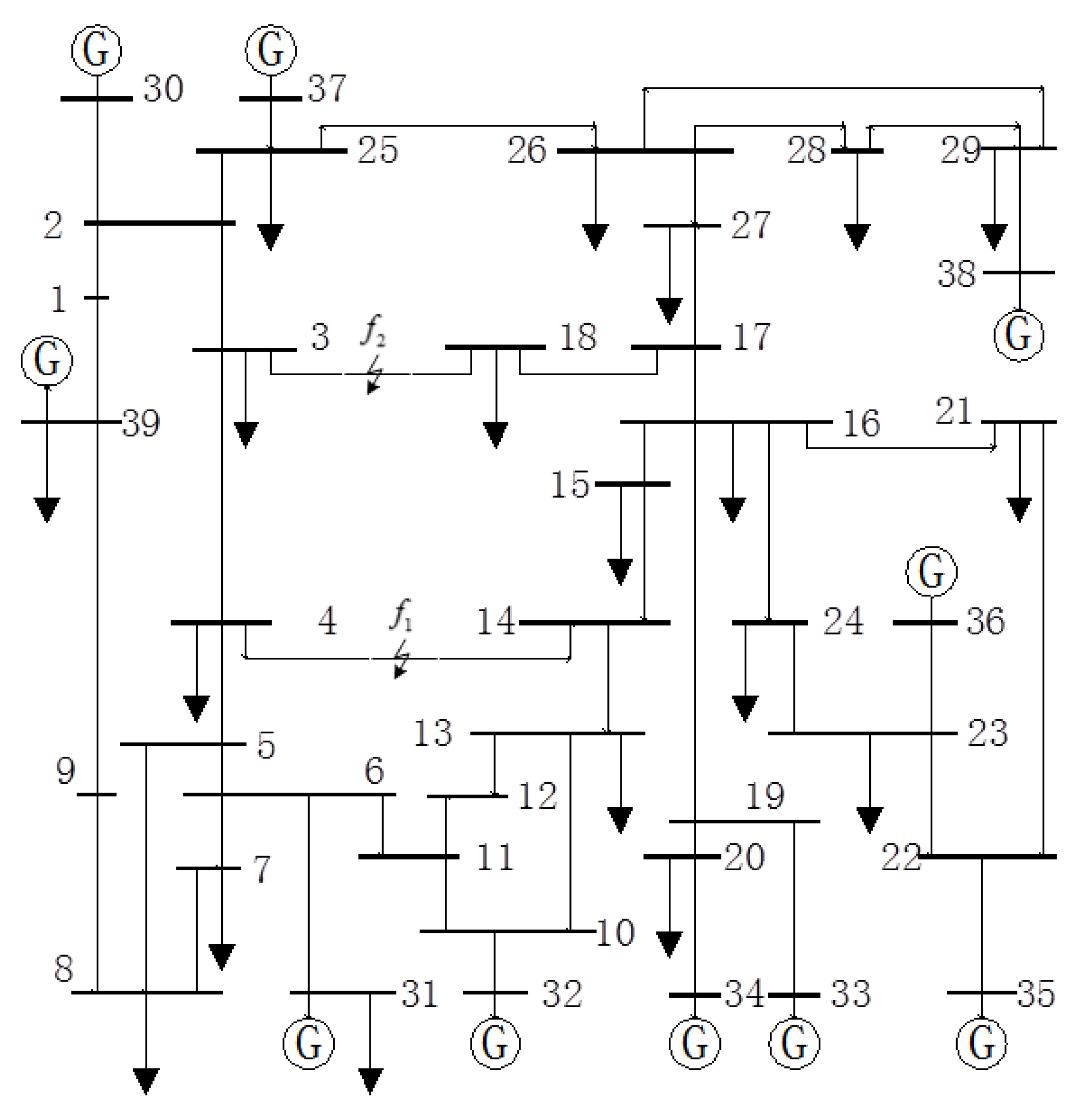
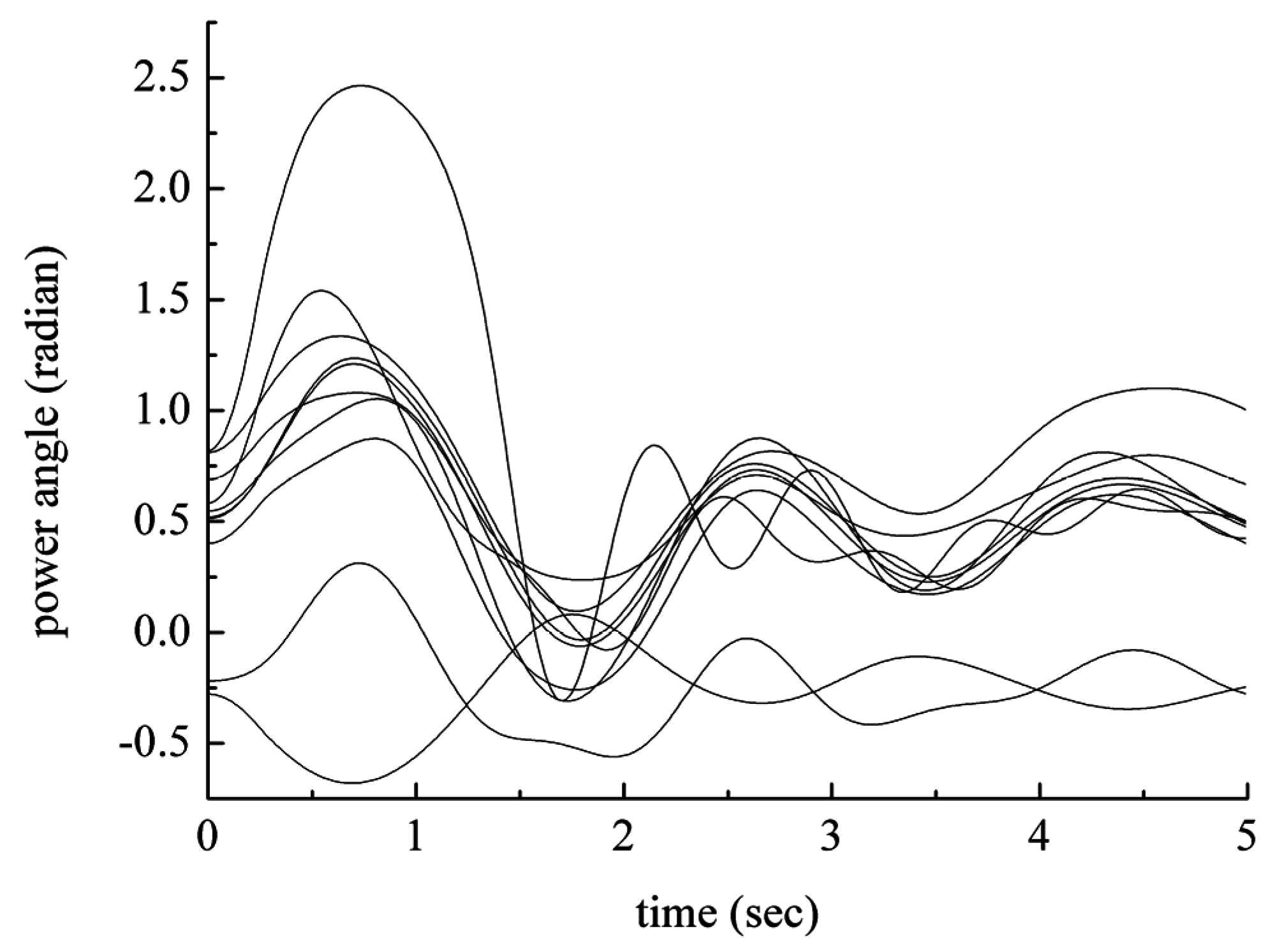
4.2. IEEE 39-Bus System
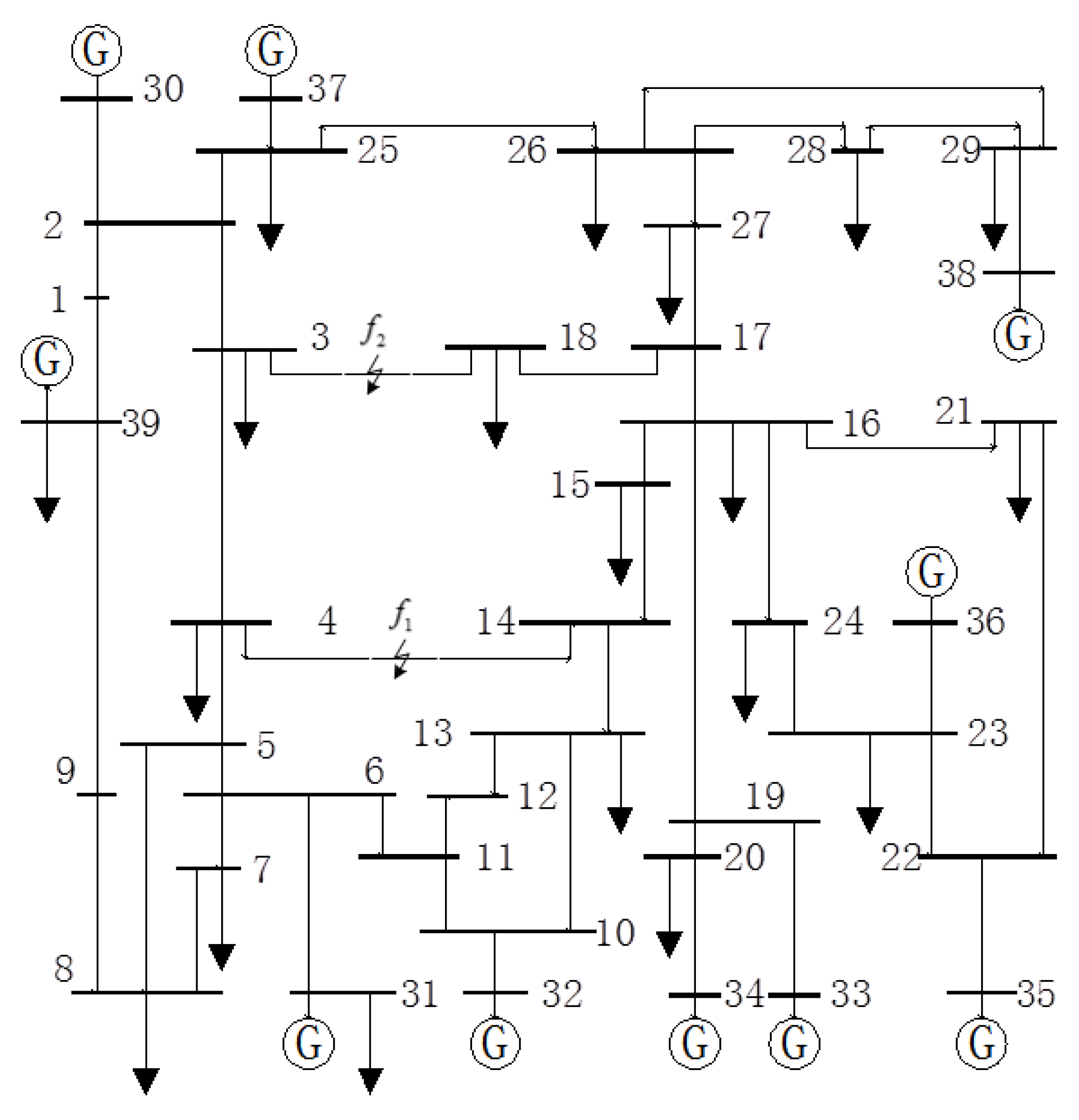
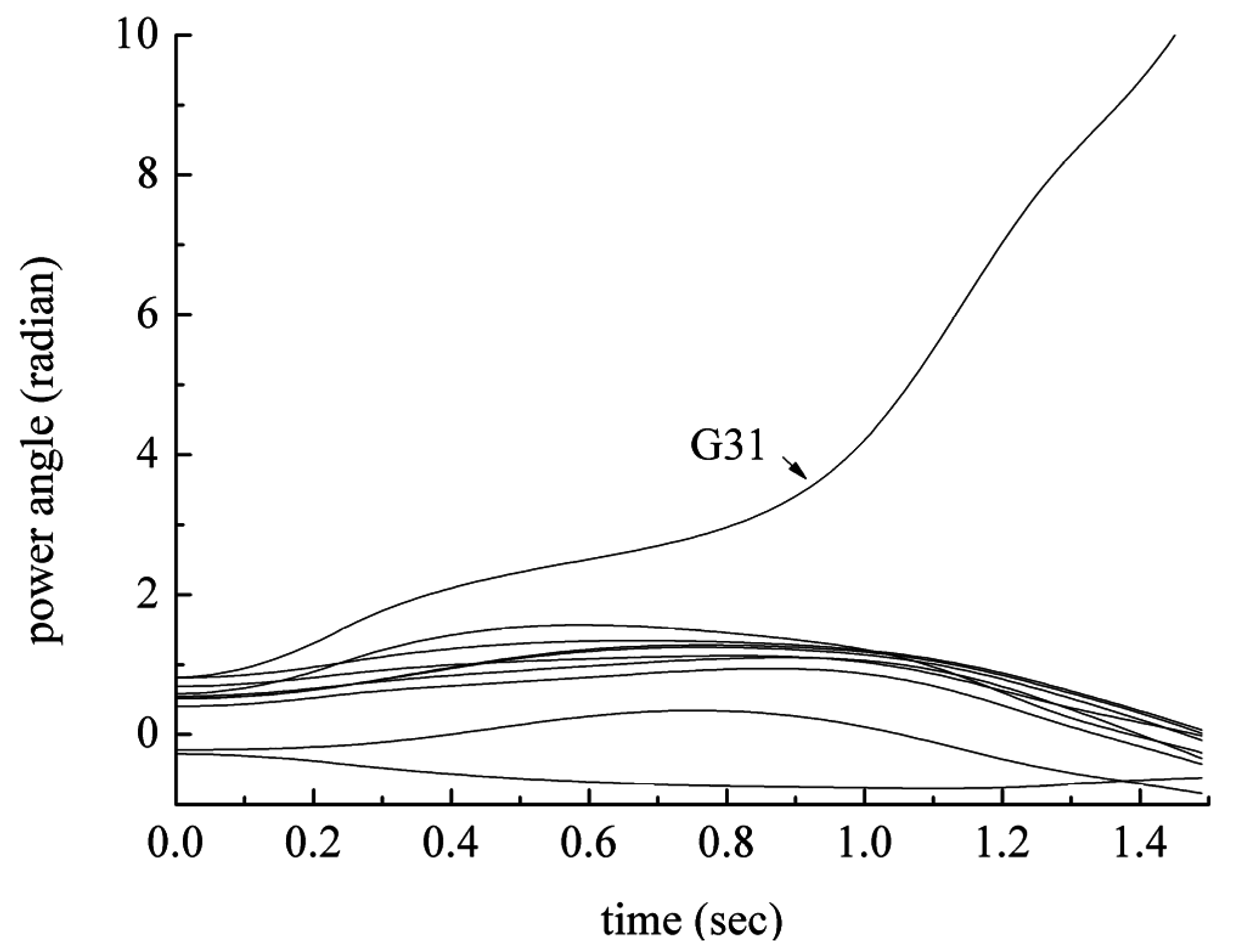
| Fault | A Three-Phase Grounding Fault Occurs on the Line between Bus 4 and Bus 14 | |
|---|---|---|
| Fault duration | 0.23 s | |
| Detection time | 0.41 s | |
| Detection angle | 126.5904° | |
| Control objective | scheme one | scheme two (145°) |
| Control law (MW) | G31 (439) | G31 (521) |
| FEP after control | 148.0° | 144.8° |
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Anjan, B. Application of direct method to transient stability analysis of power system. IEEE Trans. Power Appar. Syst. 1984, 103, 1629–1635. [Google Scholar]
- Ota, H.; Kitayama, Y.; Ito, H.; Fukushima, N.; Omata, K.; Morita, K.; Kokai, Y. Development of transient stability control system (TSC system) based on on-line stability calculation. IEEE Trans. Power Syst. 1996, 11, 1463–1472. [Google Scholar] [CrossRef]
- Mahmud, M.A.; Pota, H.R.; Aldeen, M.; Hossain, M. Partial feedback linearizing excitation controller for multimachine power systems to improve transient stability. IEEE Trans. Power Syst. 2014, 29, 561–571. [Google Scholar] [CrossRef]
- Beerten, J.; Cole, S.; Belmans, R. Modeling of multi-terminal VSC HVDC systems with distributed DC voltage control. IEEE Trans. Power Syst. 2014, 29, 34–42. [Google Scholar] [CrossRef]
- Wang, L.; Morison, K. Implementation of online security assessment. IEEE Power Energy Mag. 2006, 4, 46–59. [Google Scholar] [CrossRef]
- Madani, V.; Novosel, D.; Horowitz, S.; Adamiak, M.; Amantegui, J.; Karlsson, D.; Imai, S.; Apostolov, A. IEEE PSRC report on global industry experiences with system integrity protection schemes(SIPS). IEEE Trans. Power Deliv. 2010, 25, 2143–2155. [Google Scholar] [CrossRef]
- Kim, S.; Overbye, T.J. Optimal subinterval selection approach for power system transient stability simulation. Energies 2015, 8, 11871–11882. [Google Scholar] [CrossRef]
- Vega, R.; Glavic, M.; Ernst, D. Transient stability emergency control combining open-loop and closed-loop techniques. In Proceeding of the IEEE Power Engineering Society General Meeting, Toronto, ON, Canada, 13–17 July 2003; Volume 4, pp. 13–17.
- Pai, A. Energy Function Analysis for Power System Stability; Springer Science & Business Media: Heidelberg, Germany, 2012. [Google Scholar]
- Ruiz-Vega, D.; Pavella, M. A comprehensive approach to transient stability control. I. Near optimal preventive control. IEEE Trans. Power Syst. 2003, 18, 1446–1453. [Google Scholar] [CrossRef]
- Xue, Y.; Wehenkel, L.; Belhomme, R.; Rousseaux, P.; Pavella, M.; Euxibie, E.; Heilbronn, B.; Lesigne, J.F. Extended equal area criterion revisited (EHV power systems). IEEE Trans. Power Syst. 1992, 7, 1012–1022. [Google Scholar] [CrossRef]
- Pavella, M.; Ernst, D.; Ruiz-Vega, D. Transient Stability of Power Systems: A Unified Approach to Assessment and Control; Kluwer: Boston, MA, USA, 2000. [Google Scholar]
- Jin, T.; Chu, F.; Ling, C.; Nzongo, D. A robust WLS power system state estimation method integrating a wide-area measurement system and SCADA technology. Energies 2015, 8, 2769–2787. [Google Scholar] [CrossRef]
- Wang, L.; Girgis, A.A. A new method for power system transient instability detection. IEEE Trans. Power Deliv. 1997, 12, 1082–1088. [Google Scholar] [CrossRef]
- Xie, H.; Zhang, B.; Yu, G.; Li, Y.; Li, P.; Zhou, D.; Yao, F. Power systems transient stability detection theory based on characteristic concave or convex of trajectory. Proc. CSEE 2006, 26, 38–42. [Google Scholar]
- Xie, H.; Zhang, B. Power system transient stability detection based on characteristic concave or convex of trajectory. In Proceedings of the IEEE Transmission and Distribution Conference & Exhibition: Asia and Pacific, Dalian, China, 15–18 August 2005.
- Zhang, B.; Yang, S.; Wang, H. Closed-loop control of power system transient stability (1): Transient instability detection principle of simple power system. Electr. Power Autom. Equip. 2014, 8, 1–6. [Google Scholar]
- Zhang, B.; Yang, S.; Wang, H. Closed-loop control of power system transient stability (3): Initiation criterion of transient stability closed-loop control based on predicted response of power system. Electr. Power Autom. Equip. 2014, 10, 1–6. [Google Scholar]
- Shao, H.; Lin, Z.; Norris, S.; Bialek, J. Application of emergency-single machine equivalent method for cascading outages. In Proceedings of the Power Systems Computation Conference (PSCC), Wrocław, Poland, 18–22 August 2014; pp. 1–6.
- Jiang, Q.; Wang, Y.; Geng, G. A parallel reduced-space interior point method with orthogonal collocation for first-swing stability constrained emergency control. IEEE Trans. Power Syst. 2014, 29, 84–92. [Google Scholar] [CrossRef]
- Fouad, A.A.; Ghafurian, A.; Nodehi, K.; Mansour, Y. Calculation of generation-shedding requirements of the BC hydro system using transient energy functions. IEEE Trans. Power Syst. 1986, 1, 17–23. [Google Scholar] [CrossRef]
- Xue, Y.; van Custem, T.; Pavella, M. Extended equal area criterion justifications, generalizations, applications. IEEE Trans. Power Syst. 1989, 4, 44–52. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Zhang, B.; Hao, Z. Response Based Emergency Control System for Power System Transient Stability. Energies 2015, 8, 13508-13520. https://doi.org/10.3390/en81212381
Wang H, Zhang B, Hao Z. Response Based Emergency Control System for Power System Transient Stability. Energies. 2015; 8(12):13508-13520. https://doi.org/10.3390/en81212381
Chicago/Turabian StyleWang, Huaiyuan, Baohui Zhang, and Zhiguo Hao. 2015. "Response Based Emergency Control System for Power System Transient Stability" Energies 8, no. 12: 13508-13520. https://doi.org/10.3390/en81212381
APA StyleWang, H., Zhang, B., & Hao, Z. (2015). Response Based Emergency Control System for Power System Transient Stability. Energies, 8(12), 13508-13520. https://doi.org/10.3390/en81212381