
Fuzzy Sliding Mode Observer with Grey Prediction for the Estimation of the State-of-Charge of a Lithium-Ion Battery

Abstract
:1. Introduction
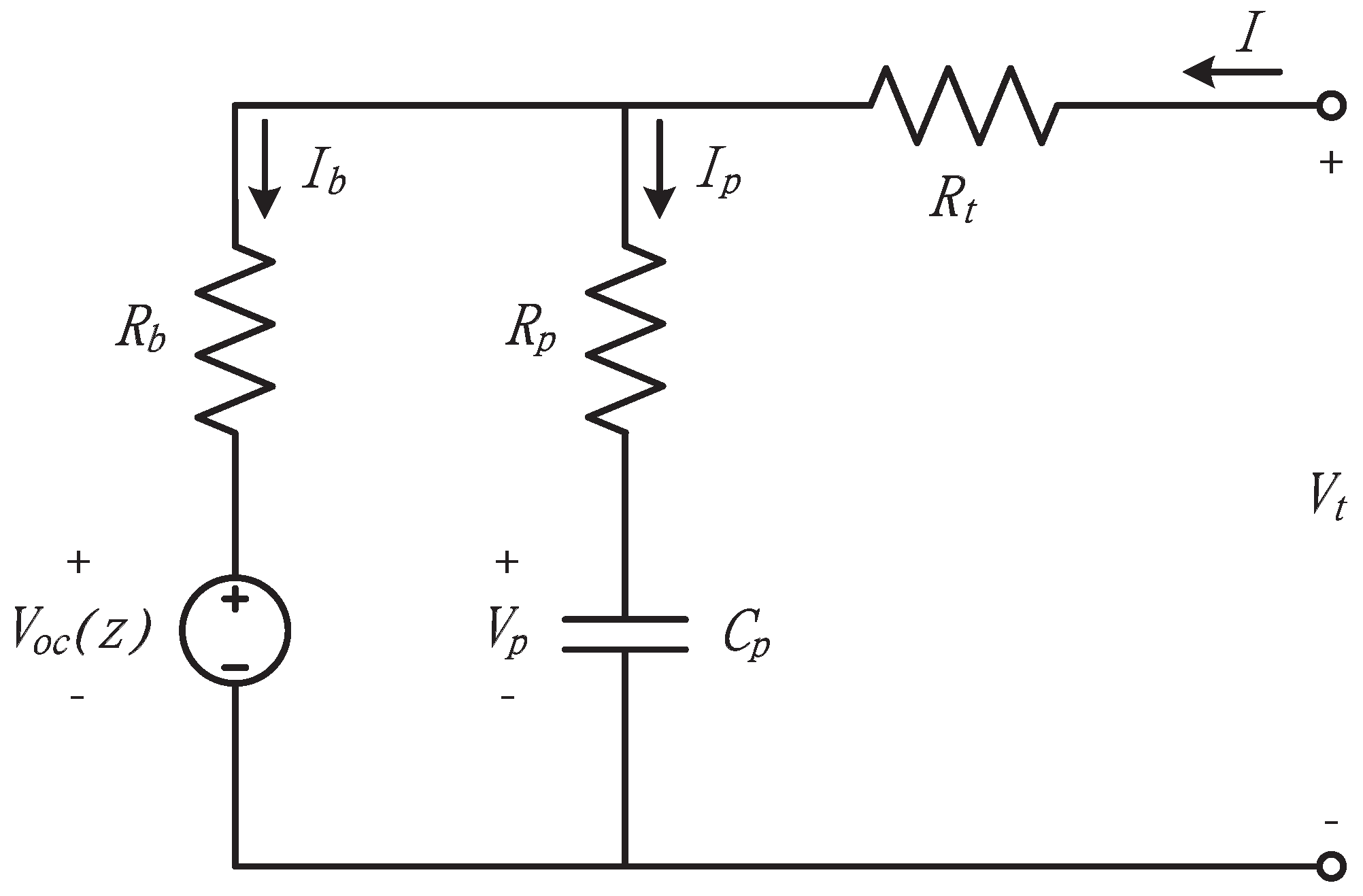
2. Equivalent Circuit-Based Battery Model
3. Two Sliding Mode Approaches for State-of-Charge Estimation
3.1. Conventional Sliding Mode Observer
3.2. Adaptive Gain Sliding Mode Observer
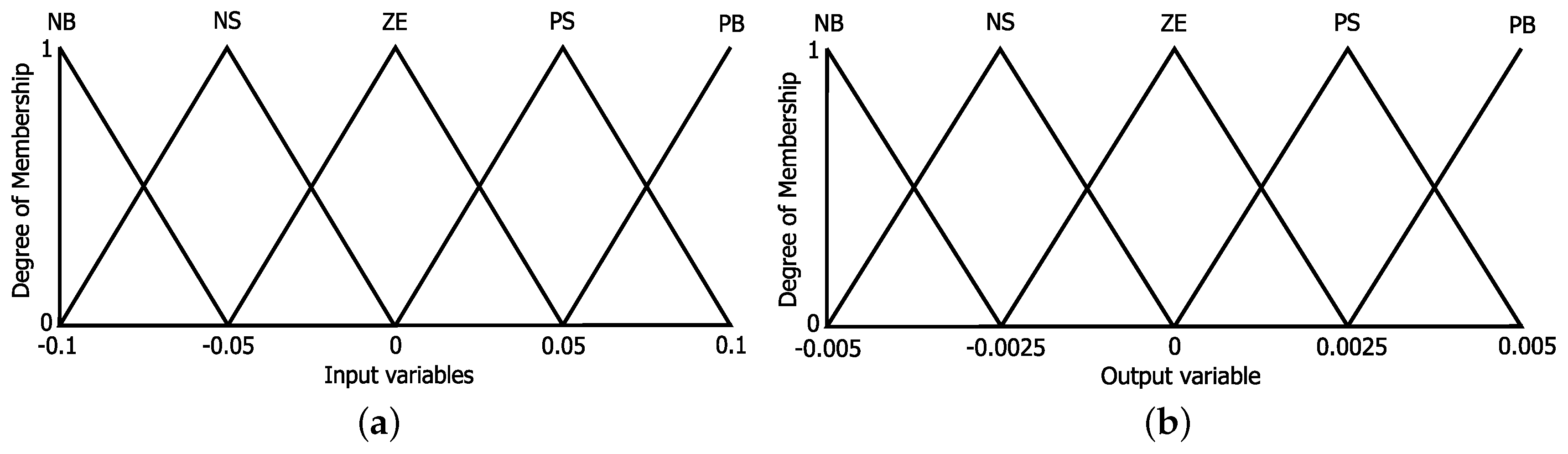
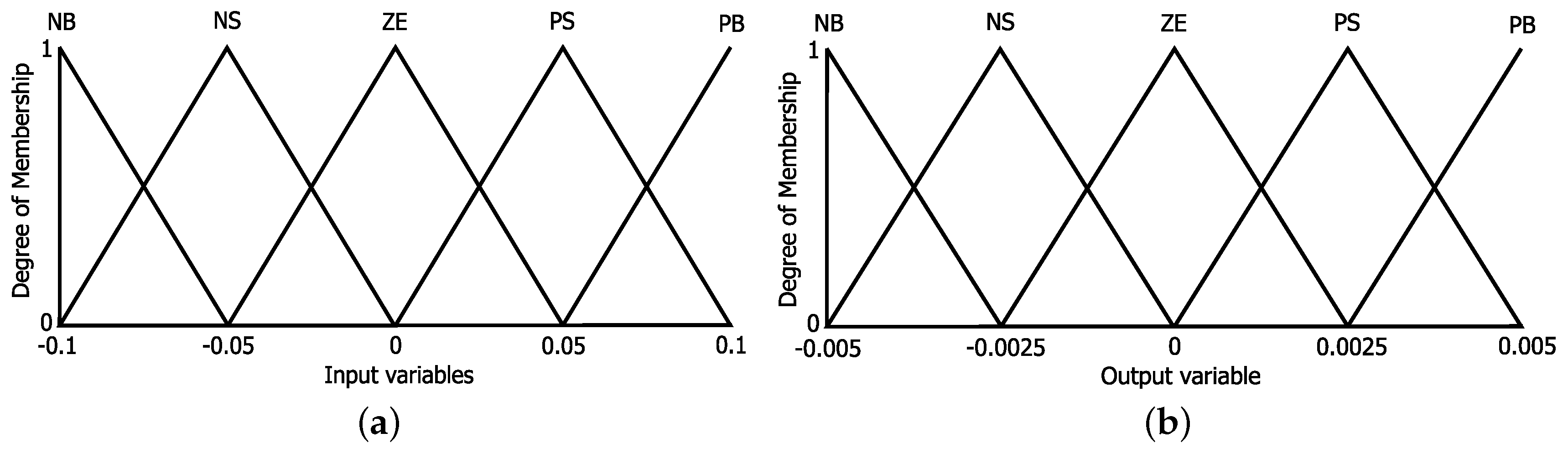
4. Fuzzy Sliding Mode Observer with Grey Prediction
4.1. Grey Prediction for the Terminal Voltage of a Li-Ion Battery
4.2. Observer Gain Adaptation Law

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| e | |||||
|---|---|---|---|---|---|
| PB | PS | ZE | NS | NB | |
| PB | NS | - | - | - | NS |
| PS | NS | NS | - | NS | NS |
| ZE | NS | ZE | ZE | ZE | NS |
| NS | PS | PS | PS | PS | PS |
| NB | PB | PB | PB | PB | PB |
5. Experiment Results
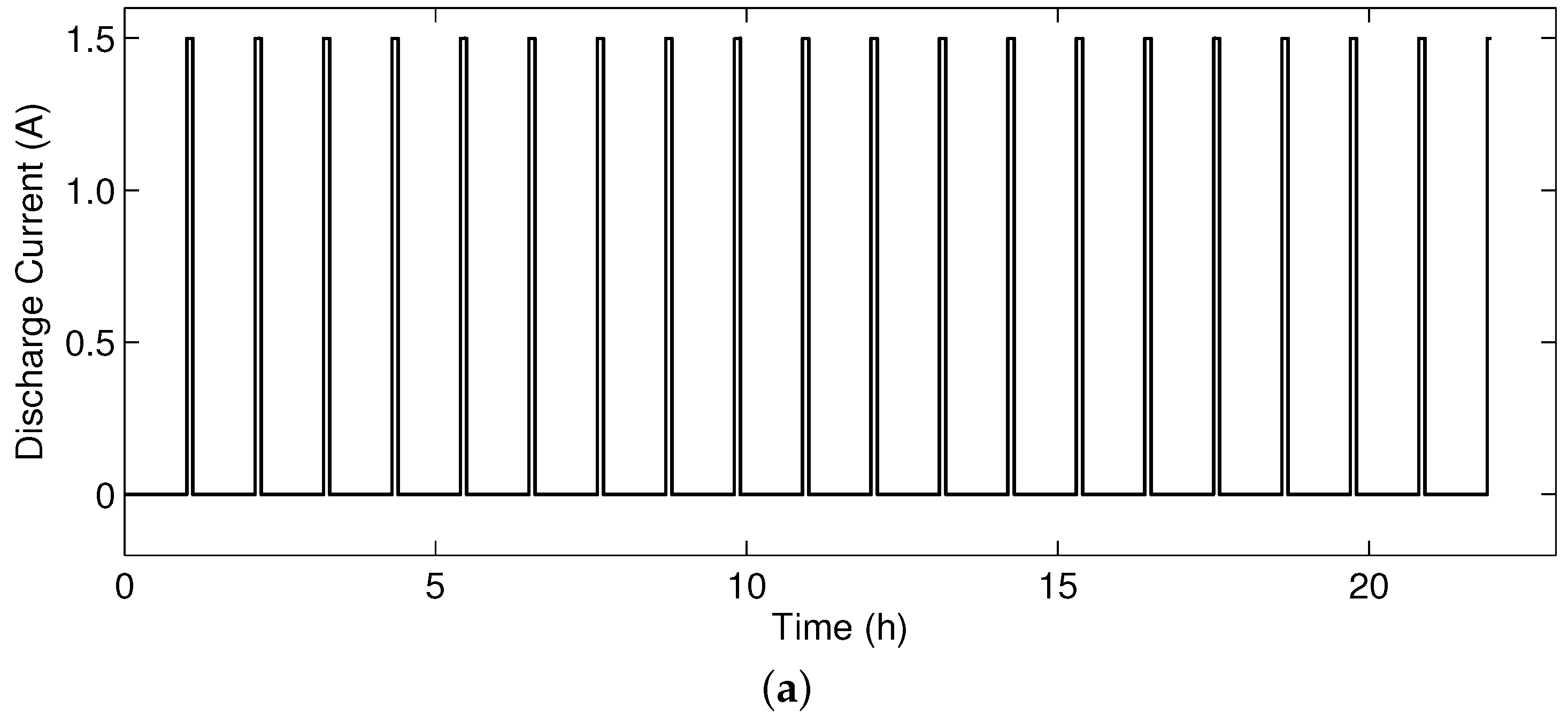
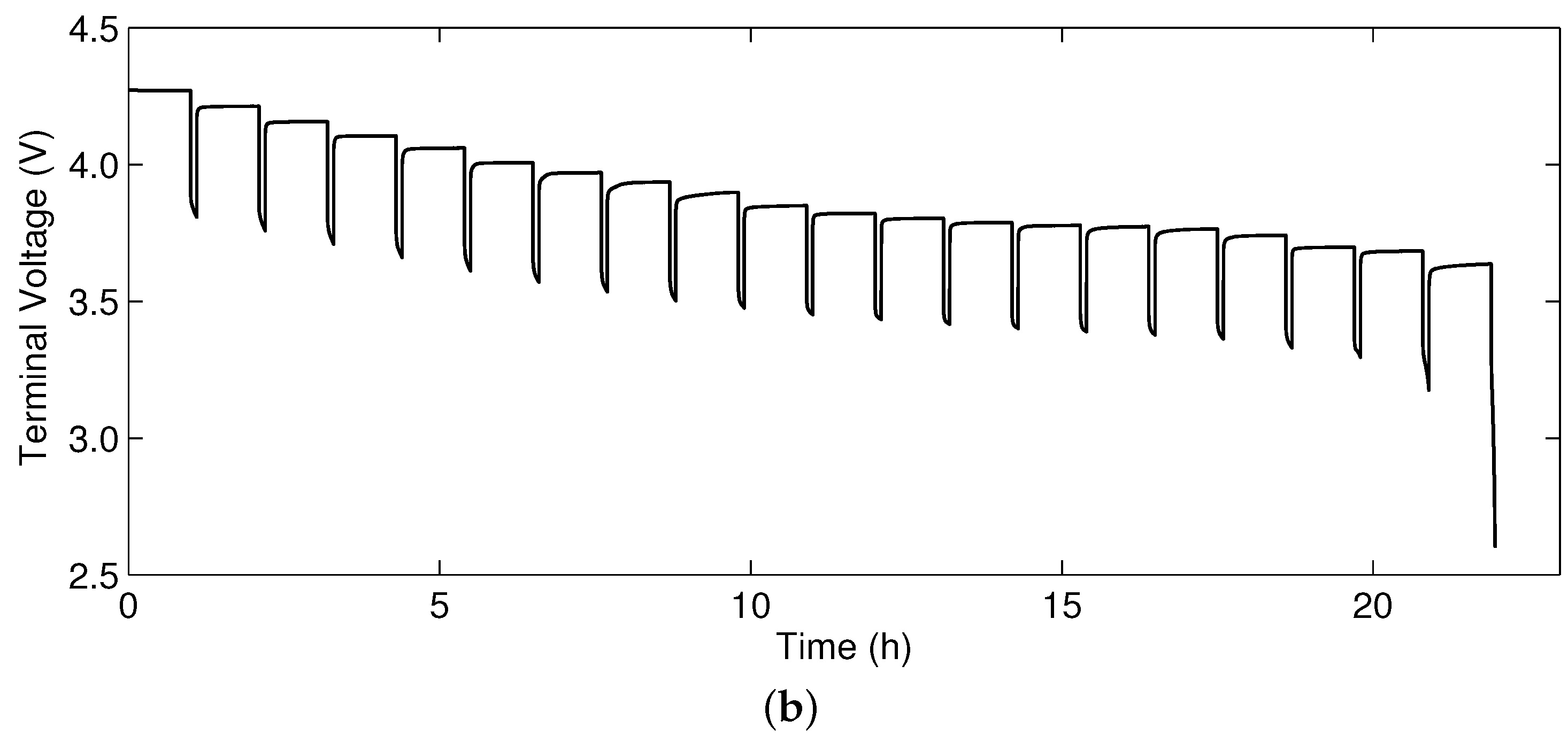
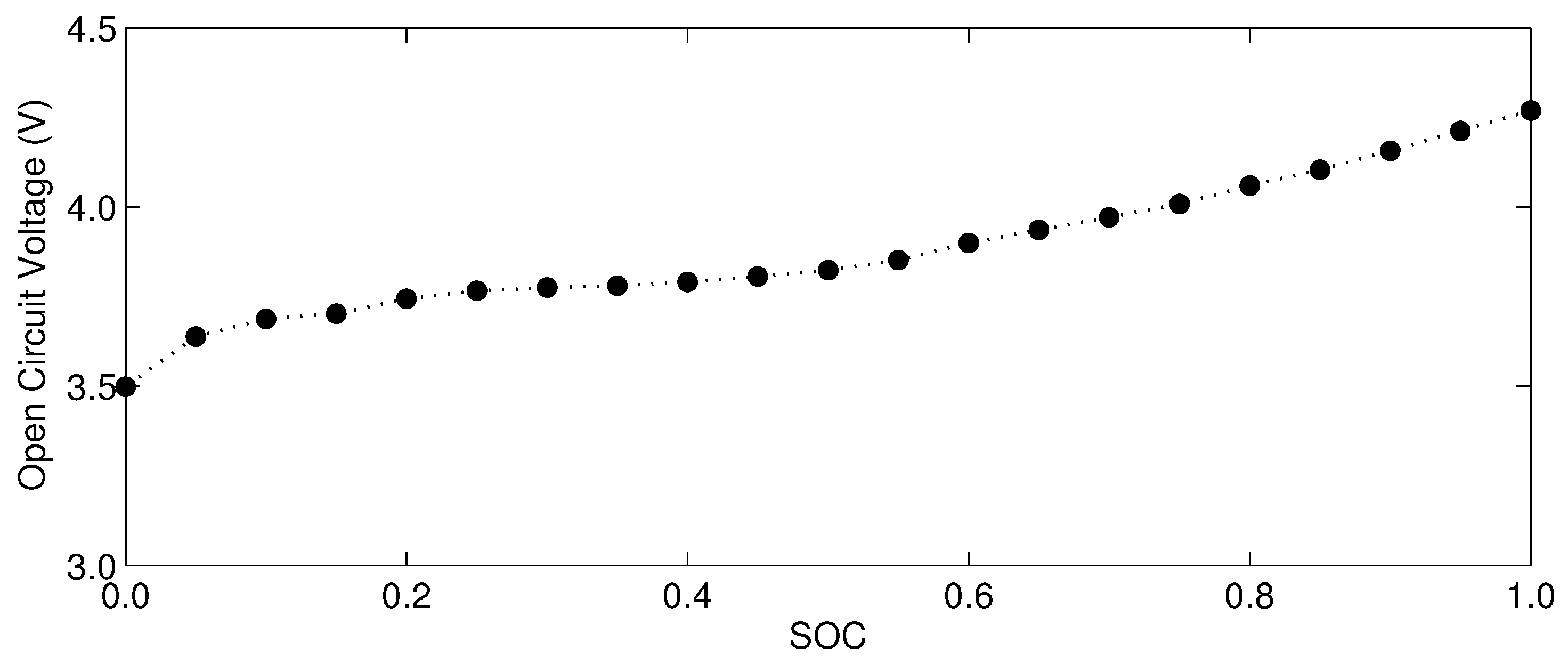
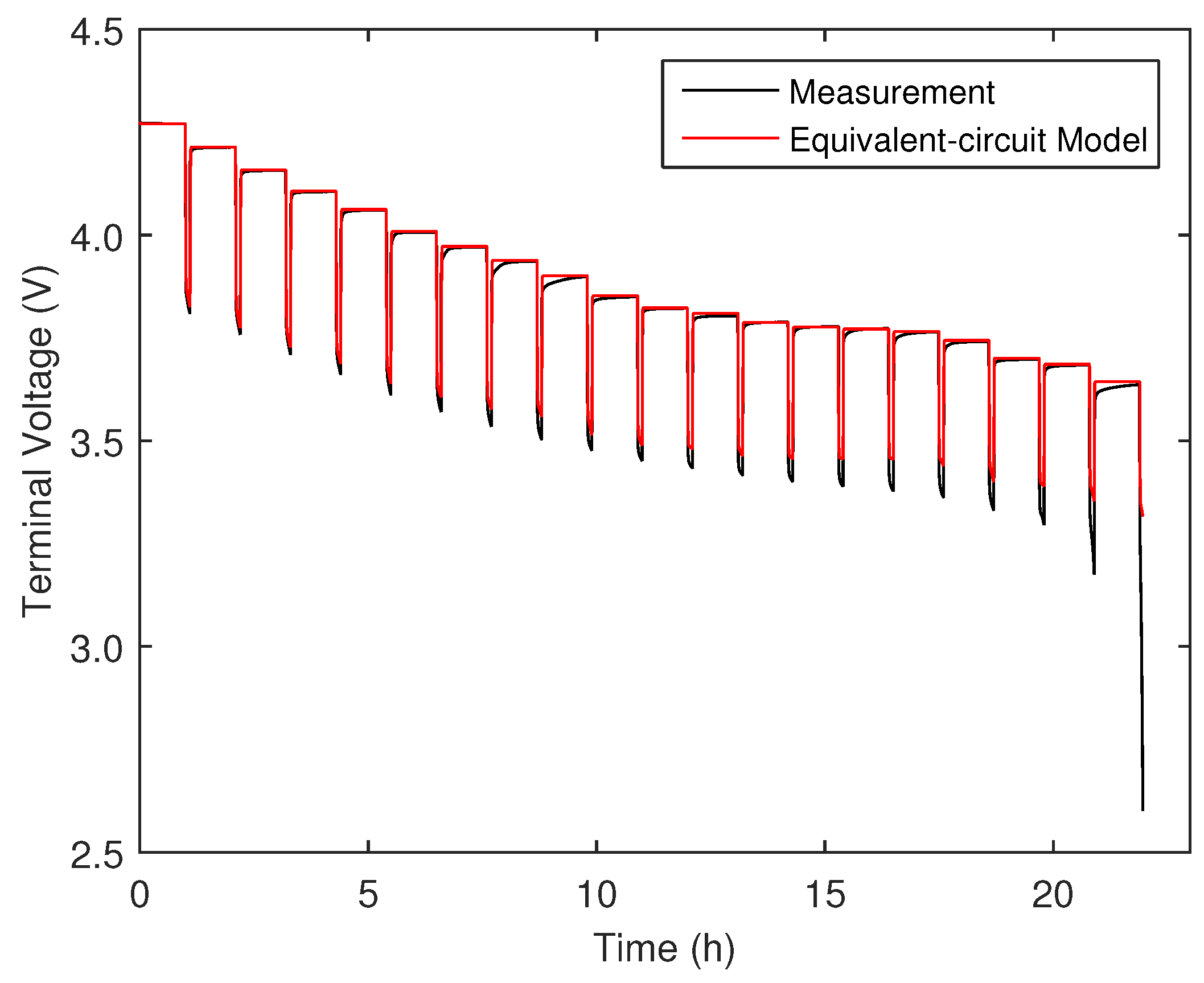
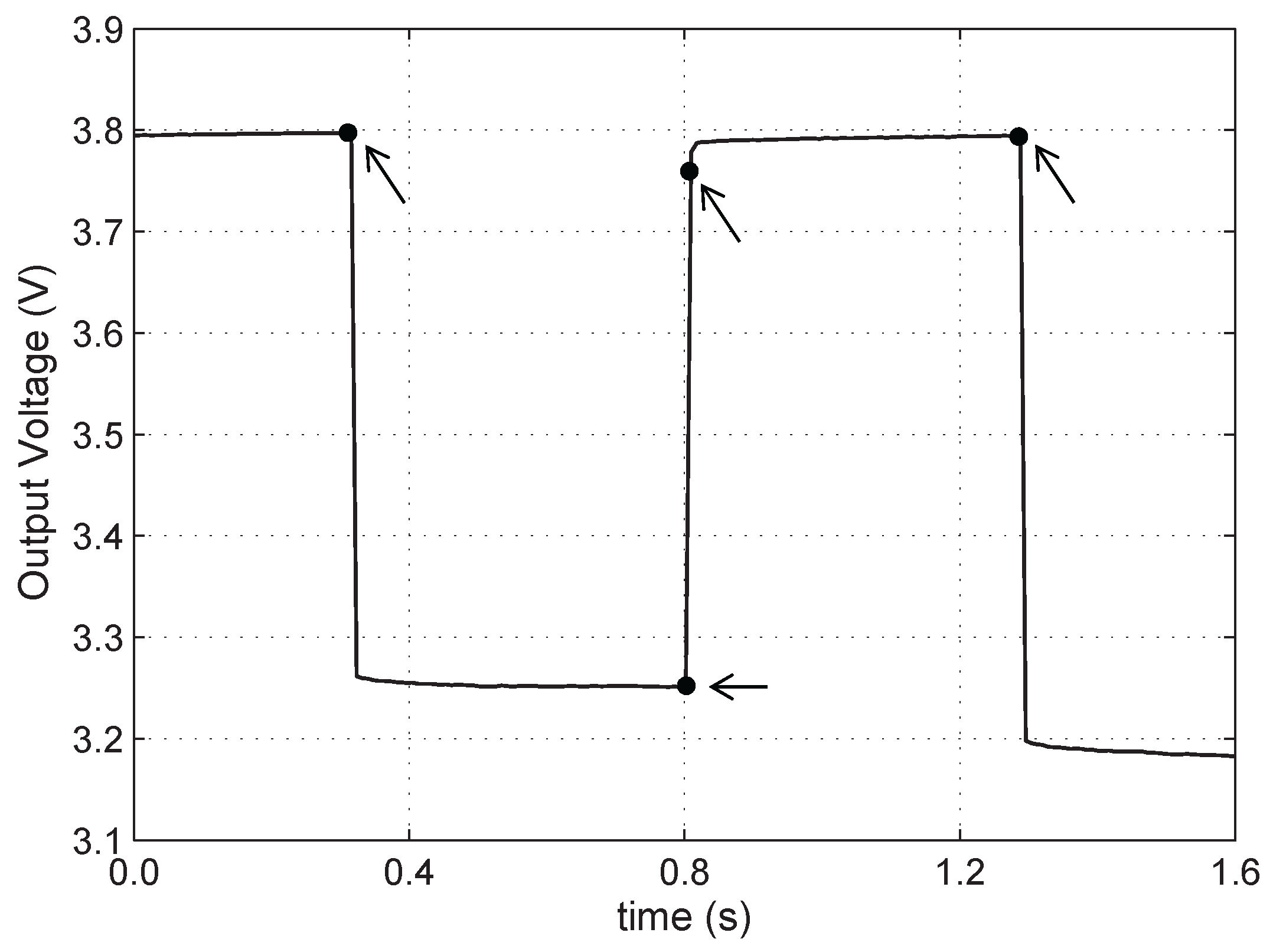
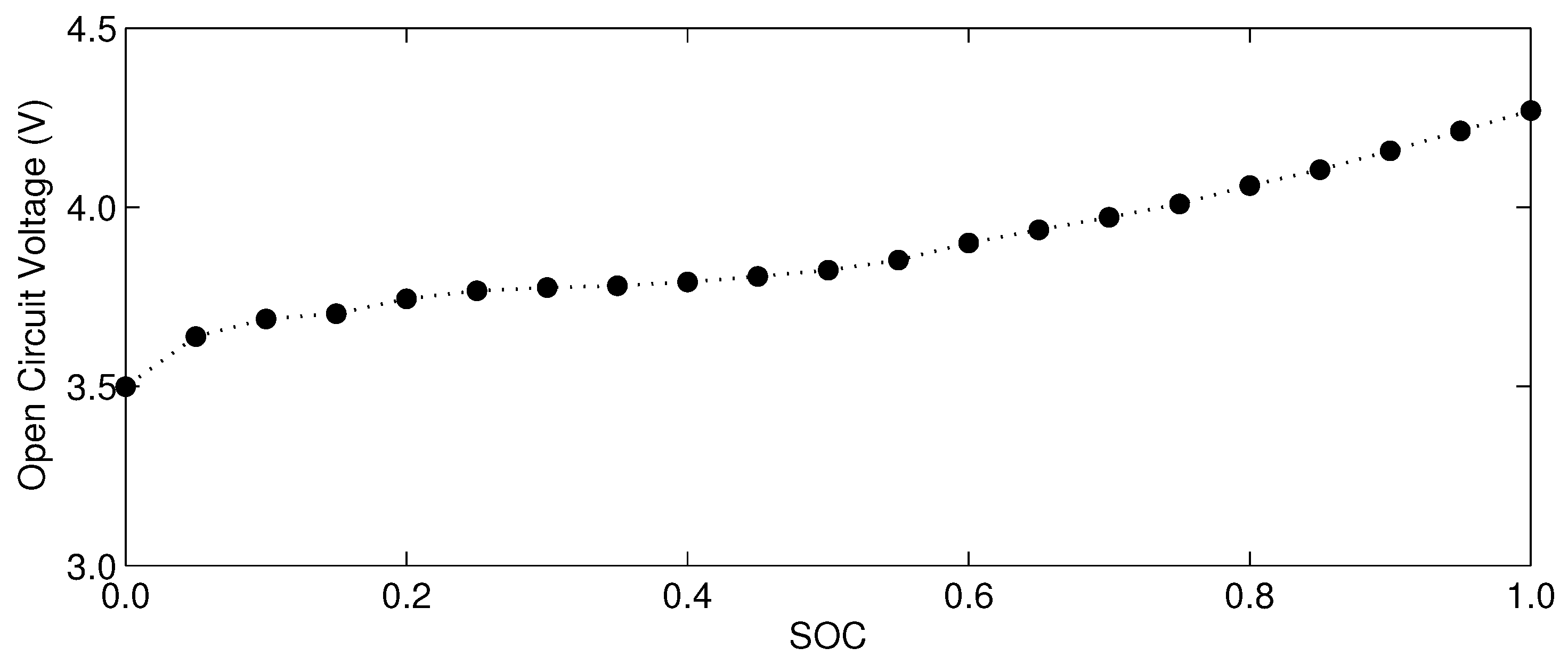
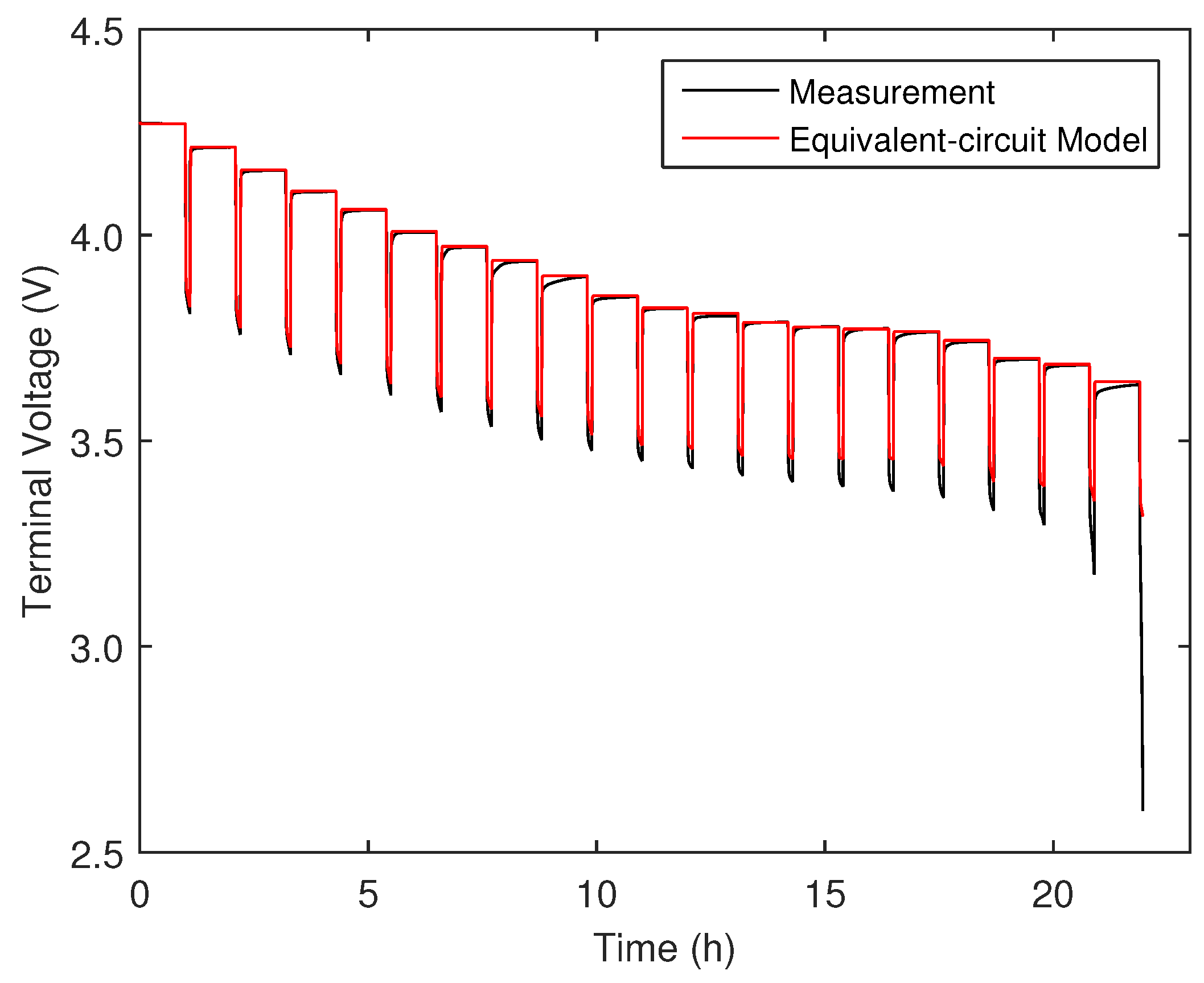
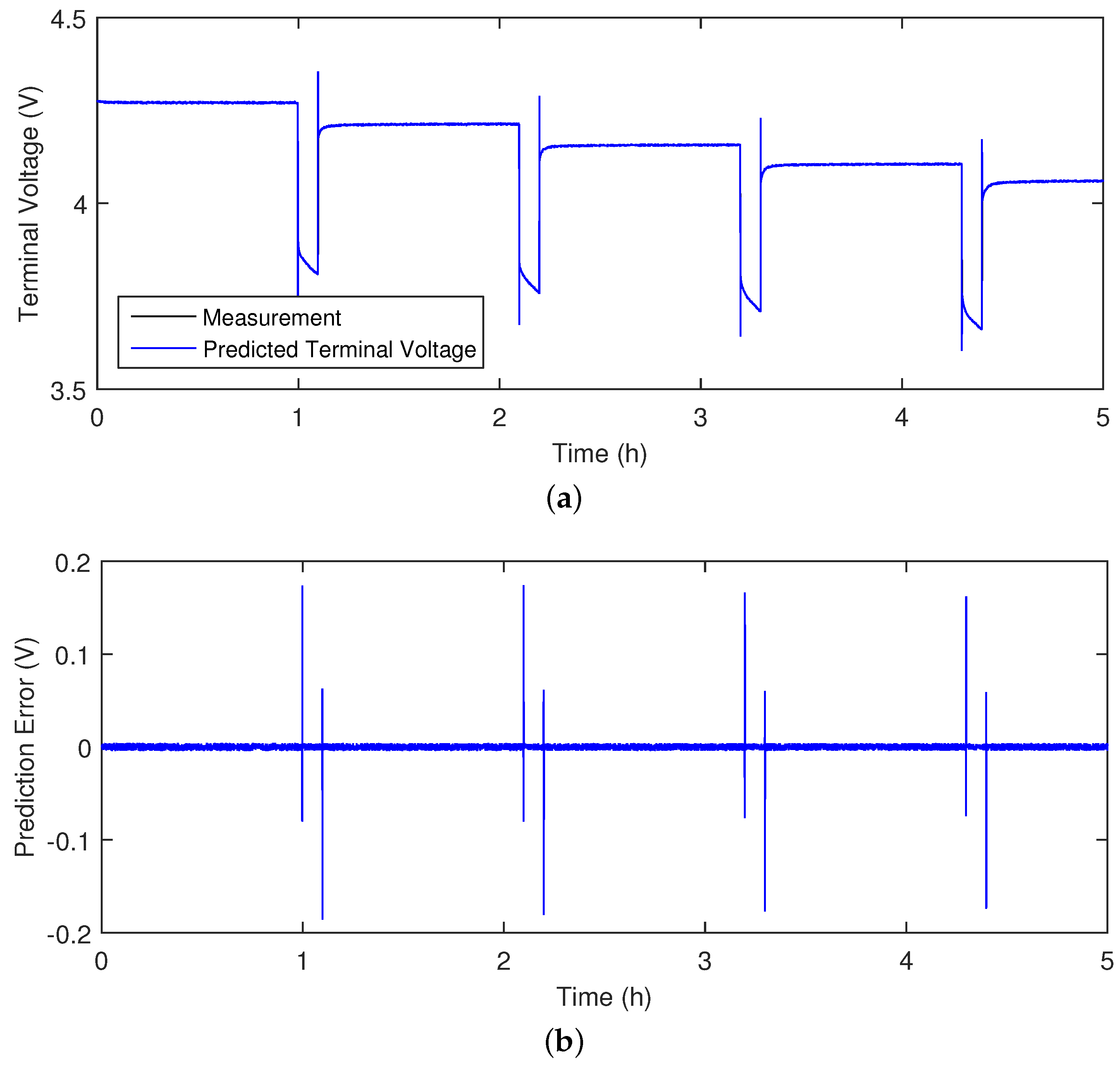
5.1. Parameter Extraction
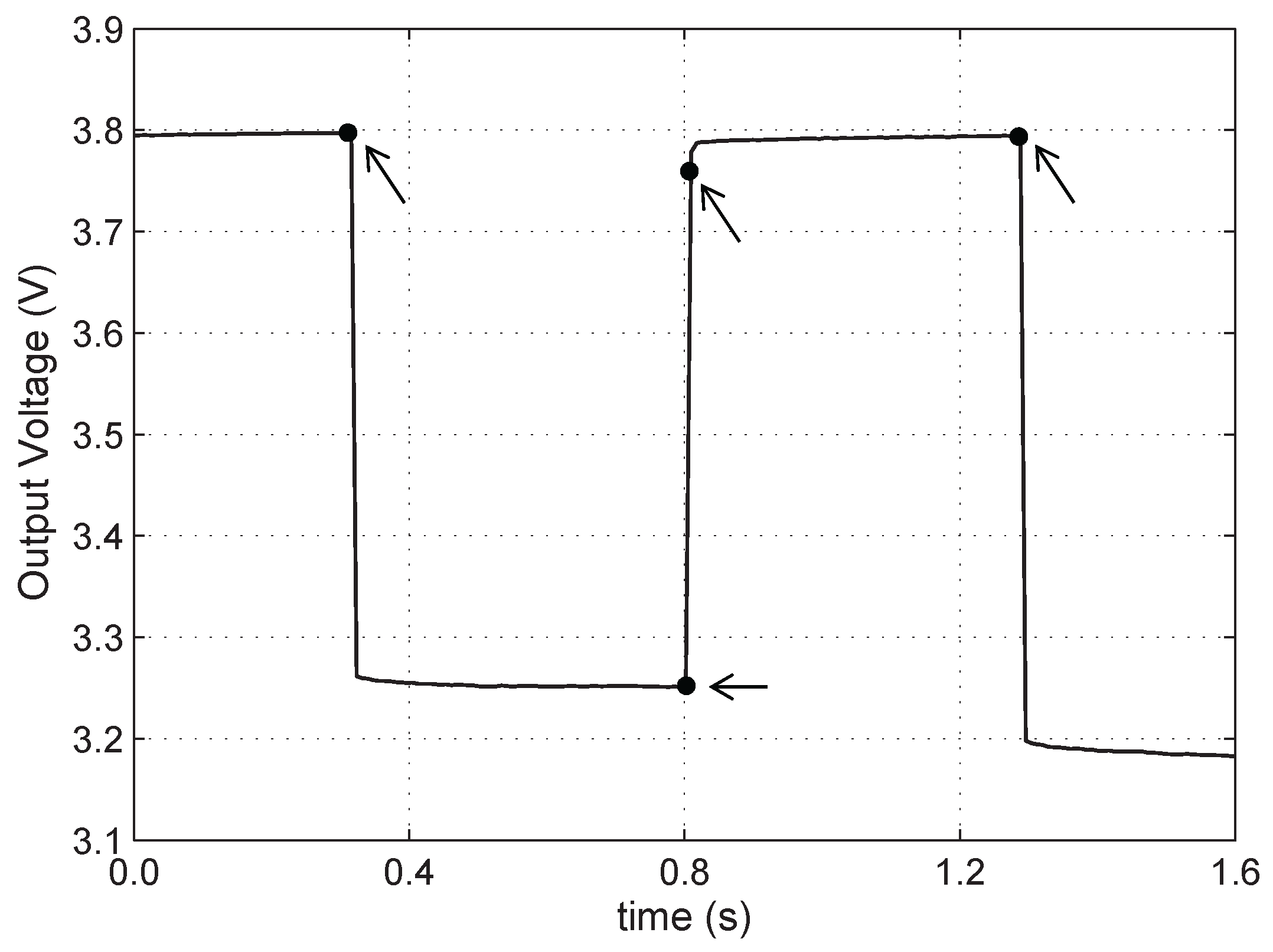
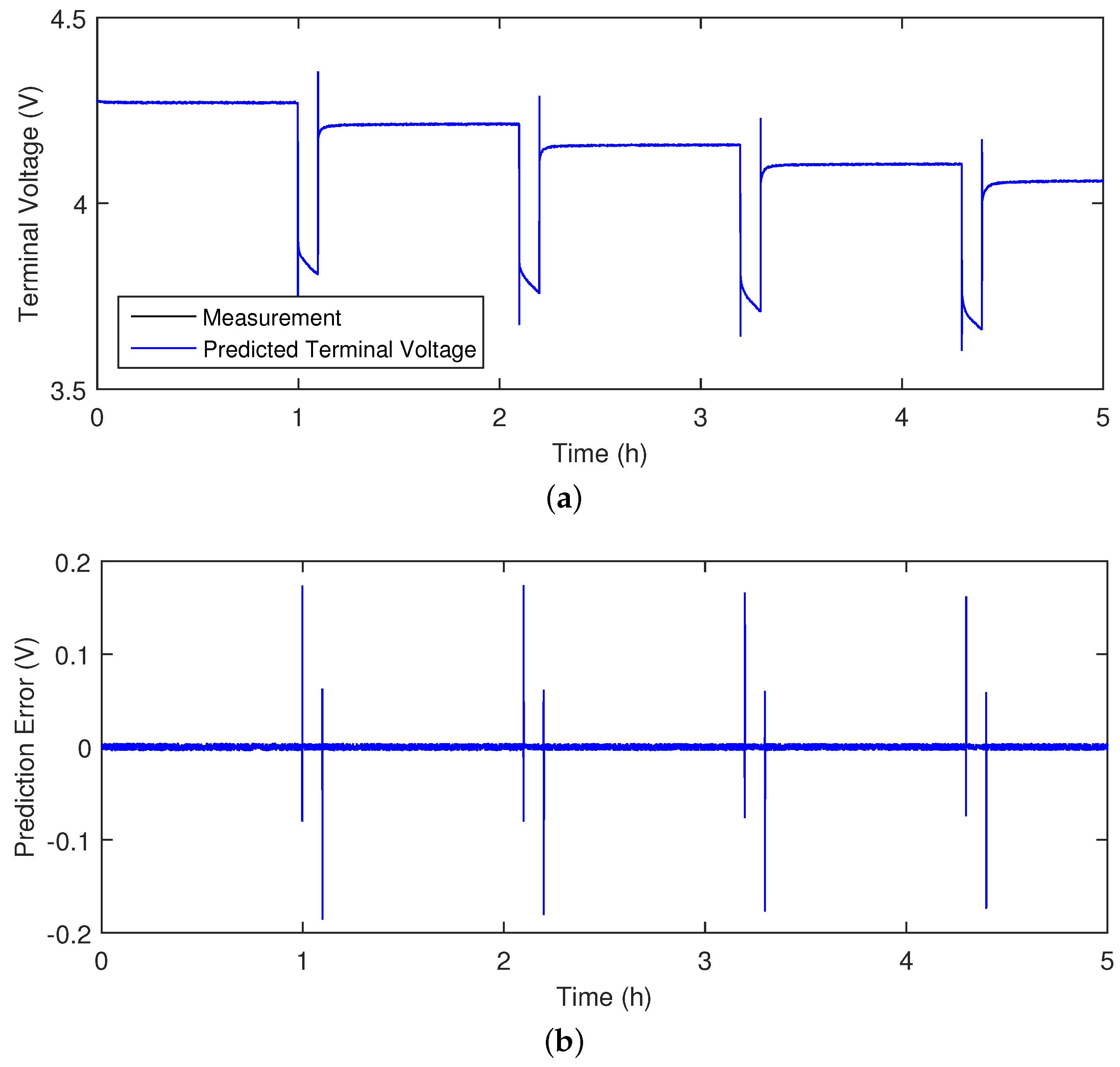
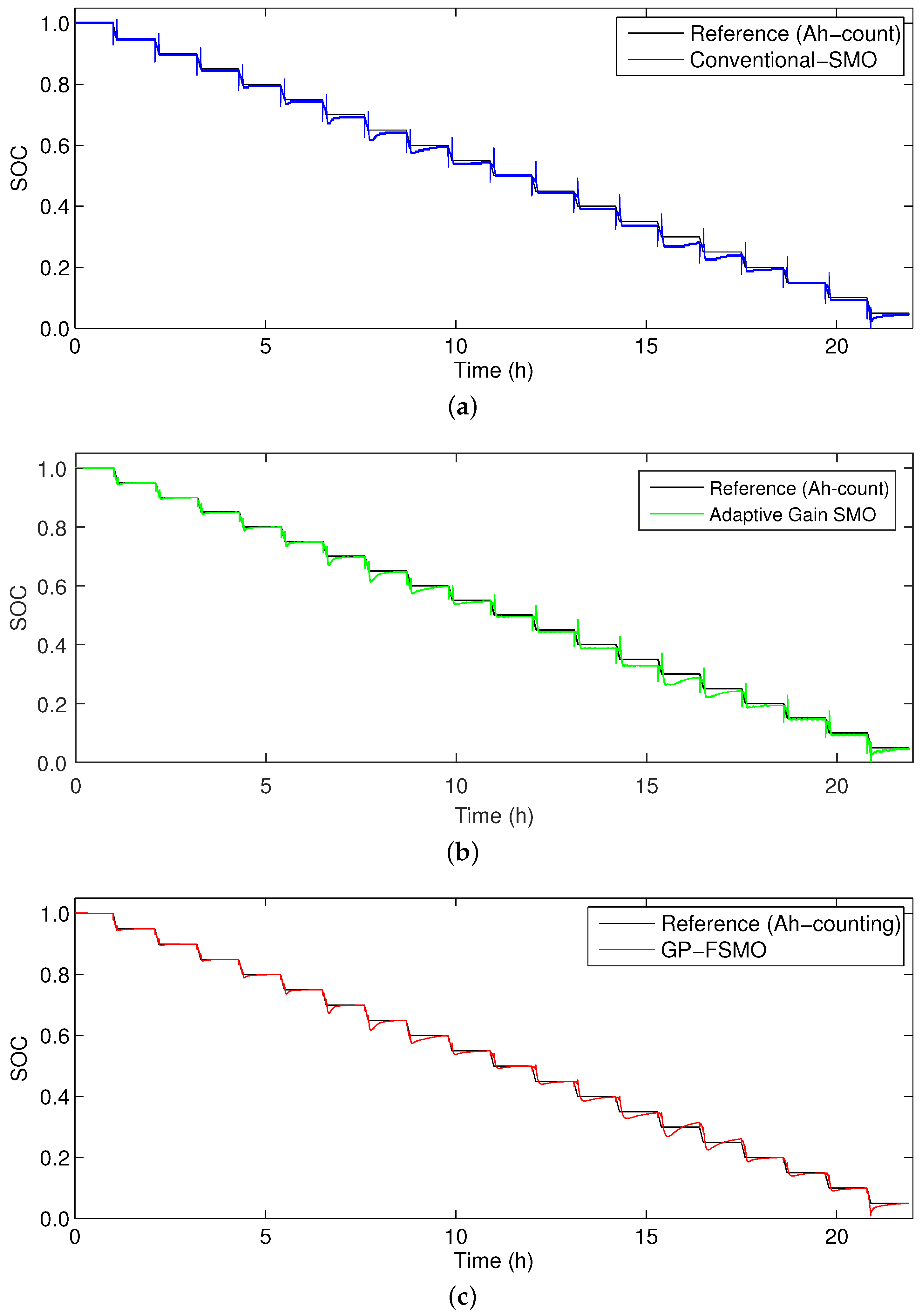
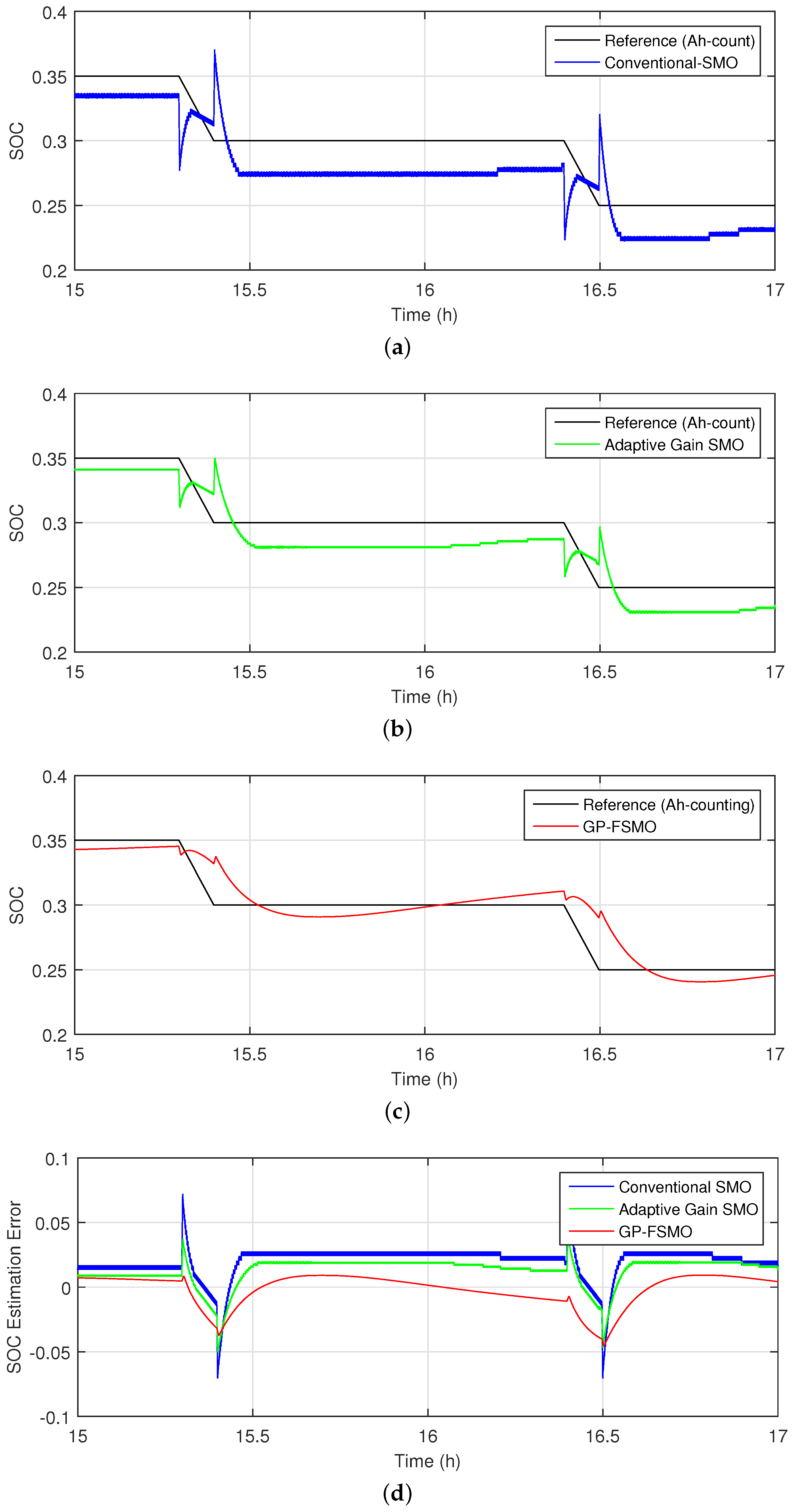
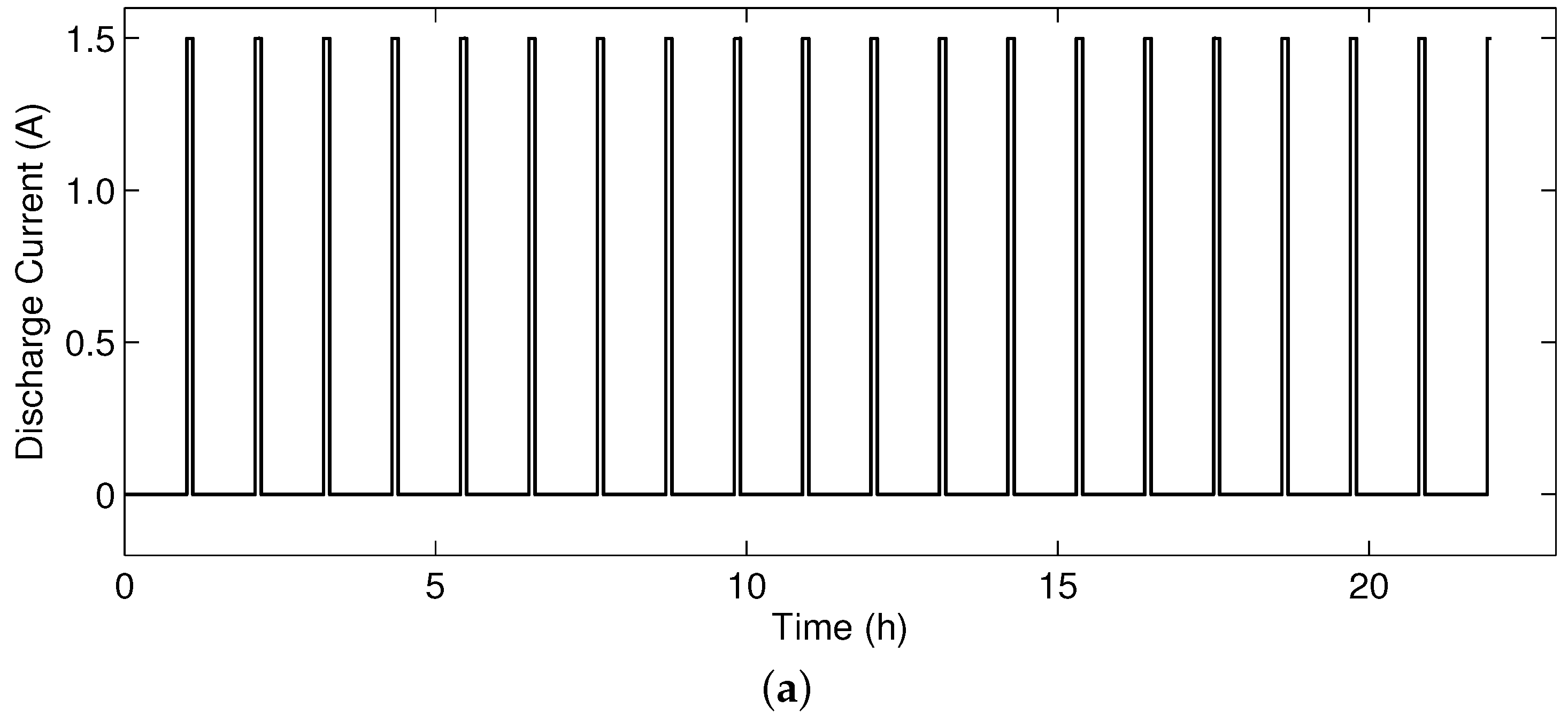
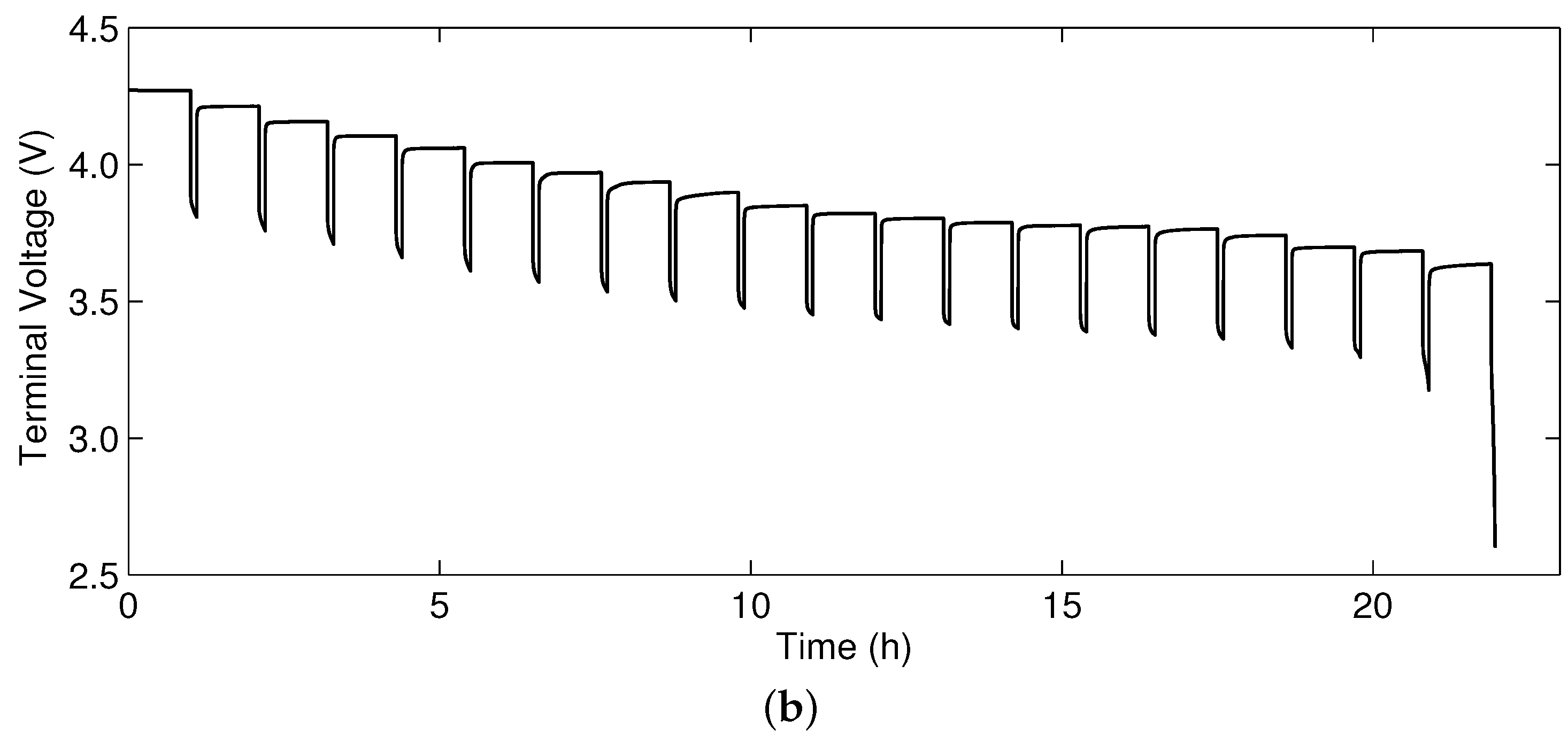
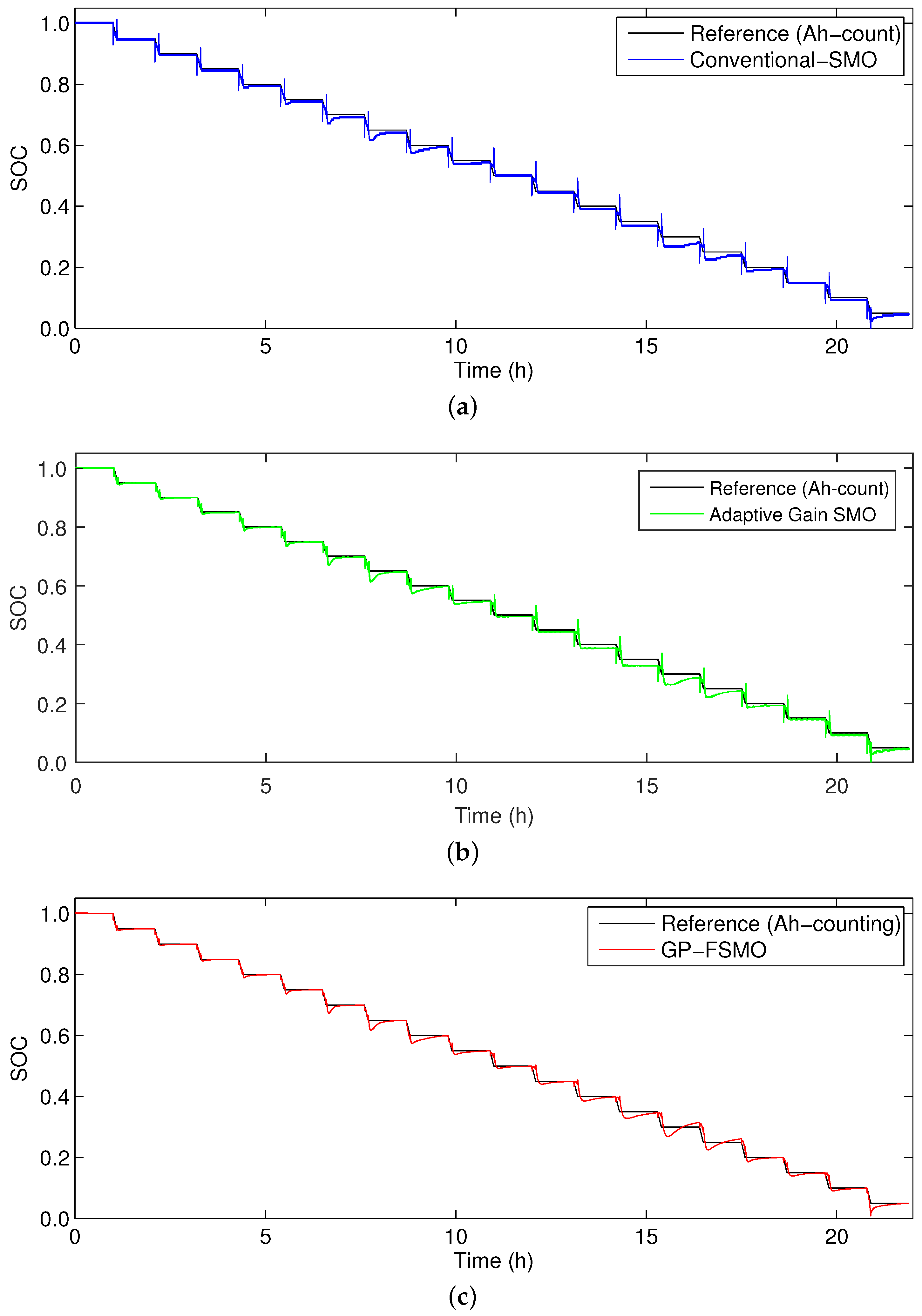
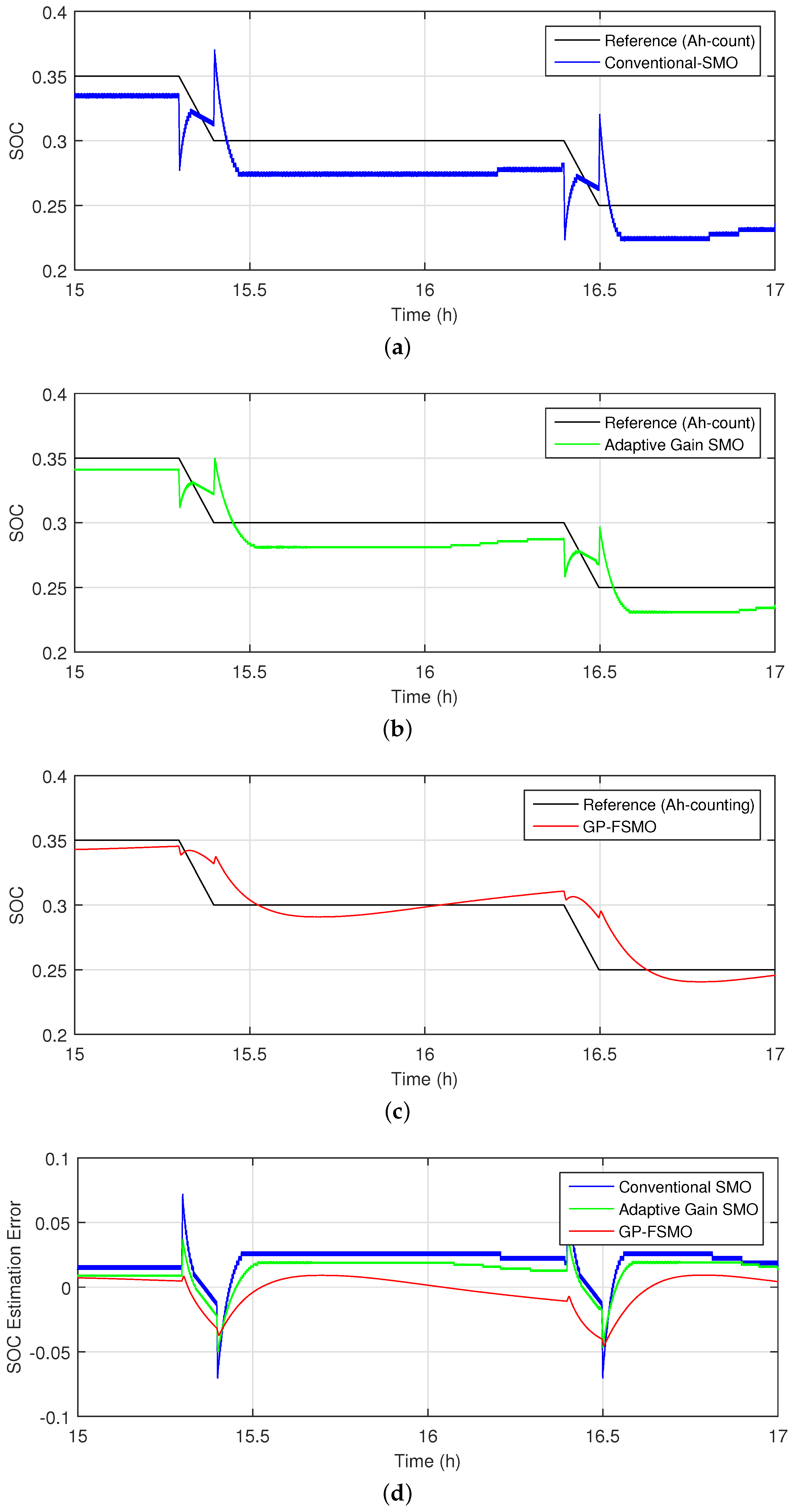
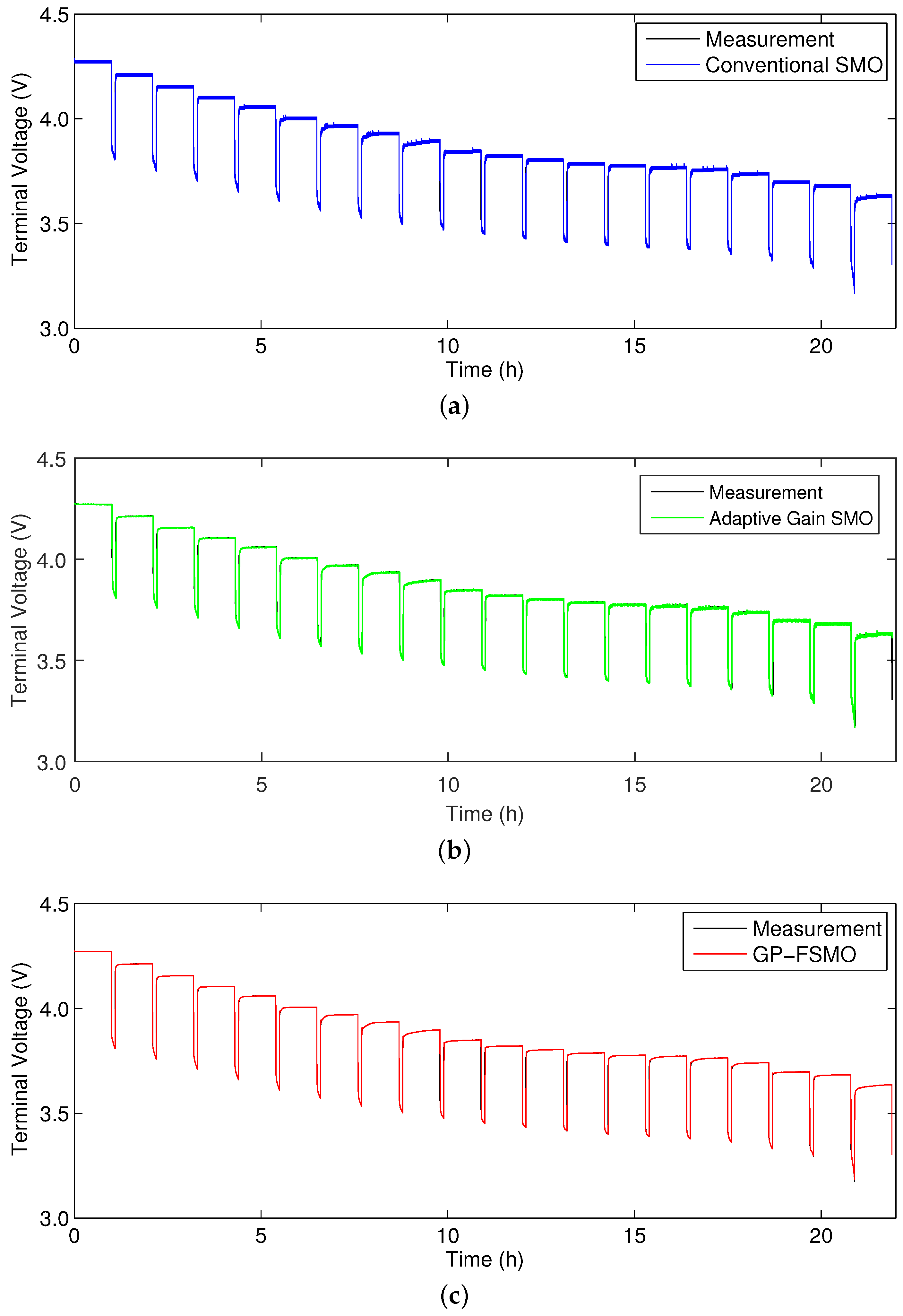
5.2. Pulse Discharge Test
| SOC range | Error (%) | Methods | ||
|---|---|---|---|---|
| Conventional SMO | Adaptive gain SMO | GP-FSMO | ||
| 100% to 70% | Maximum | 5.89 | 3.05 | 2.28 |
| Mean | 2.4 | 1.36 | 1.07 | |
| 70% to 40% | Maximum | 6.75 | 4.97 | 3.83 |
| Mean | 3.71 | 2.87 | 1.92 | |
| 40% to 5% | Maximum | 8.16 | 5.54 | 4.11 |
| Mean | 3.73 | 3.01 | 1.94 | |

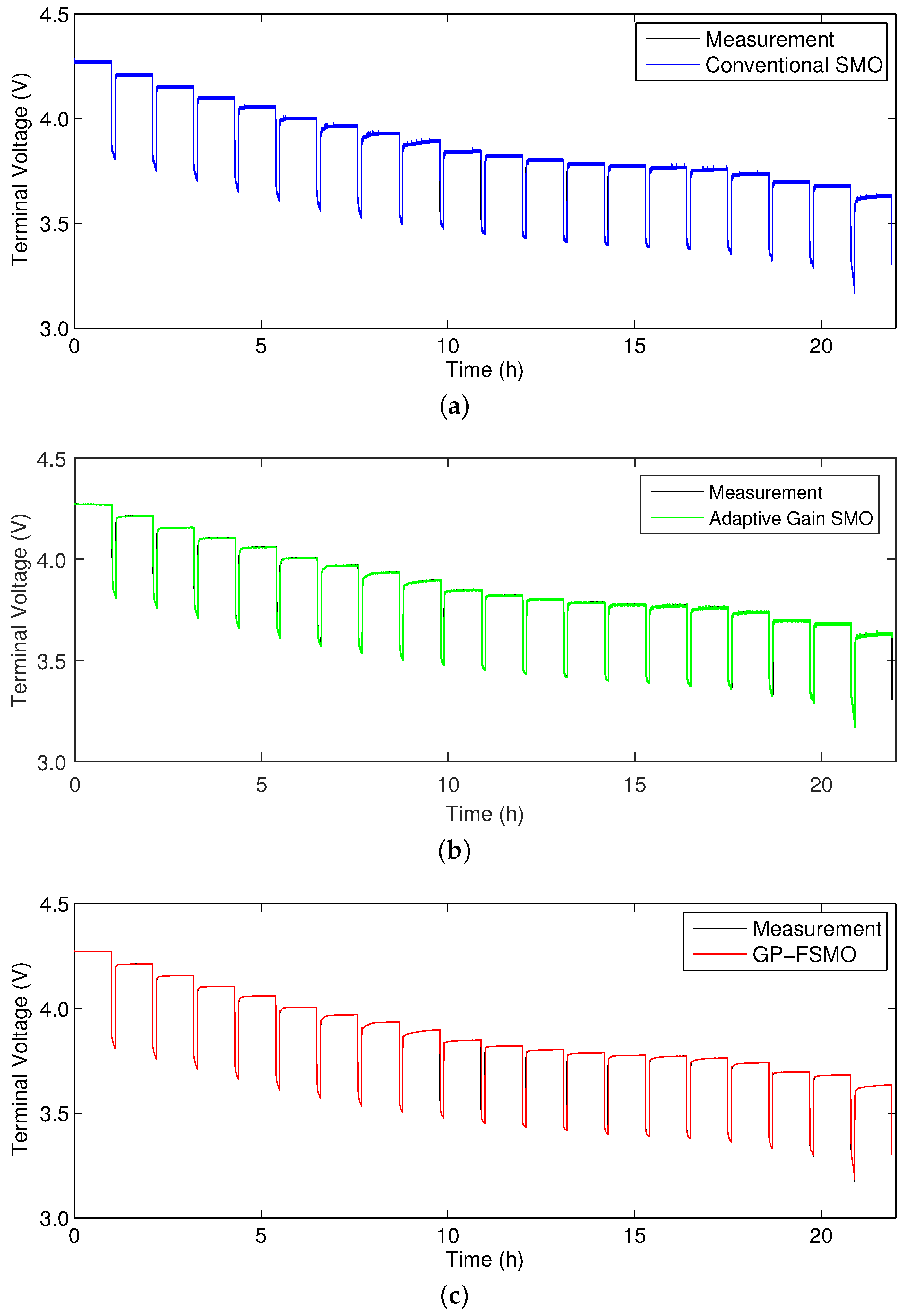
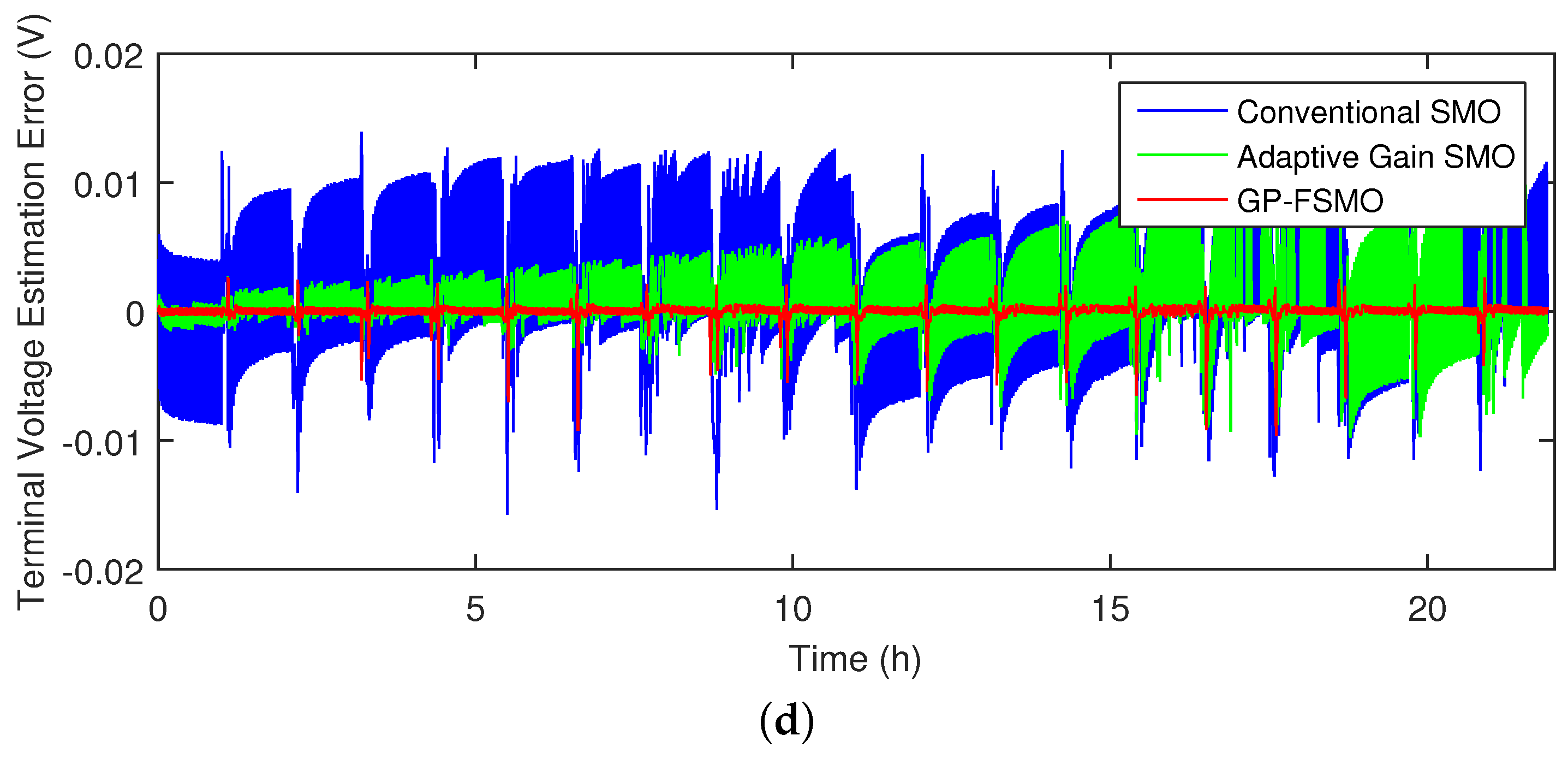
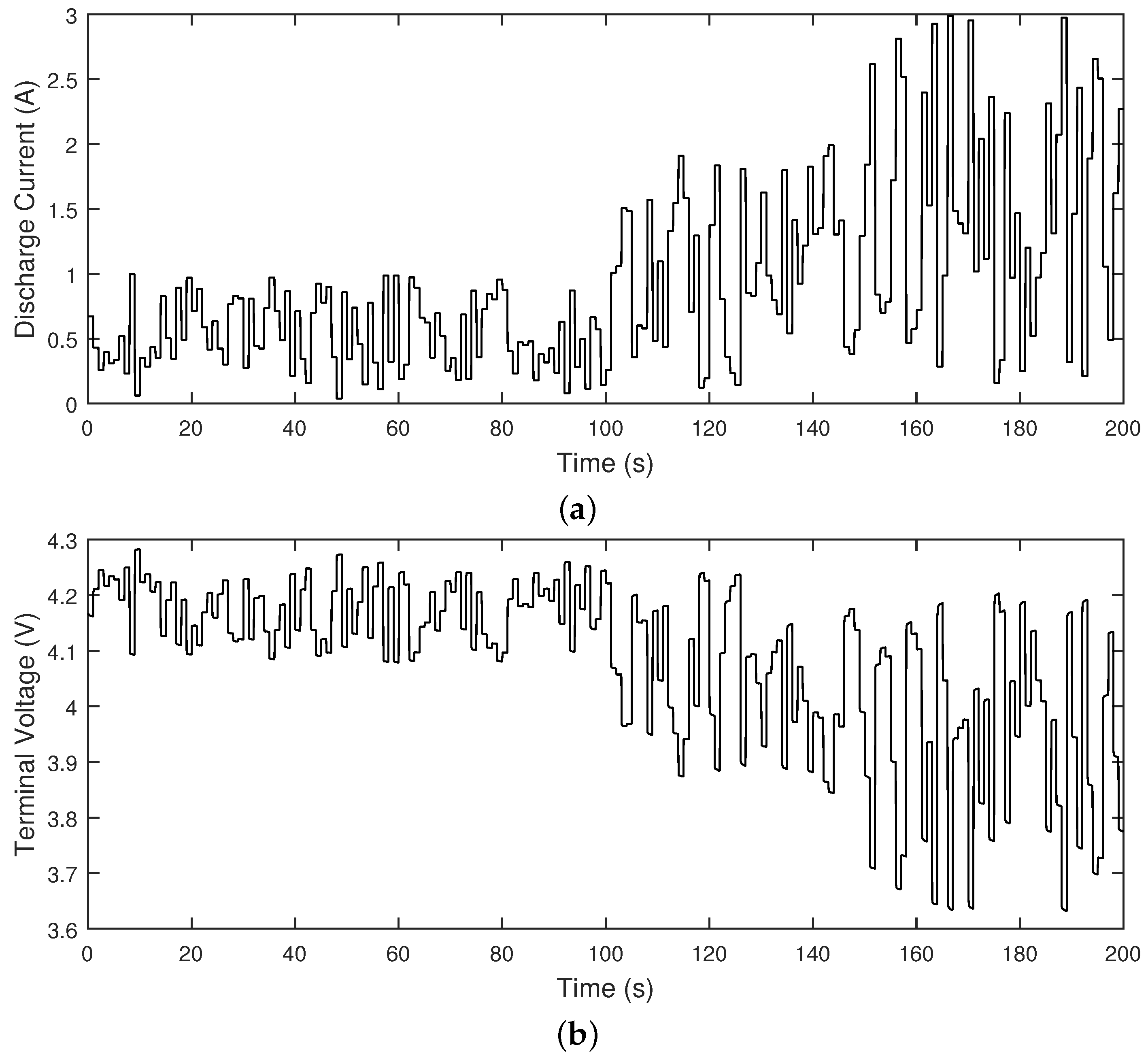
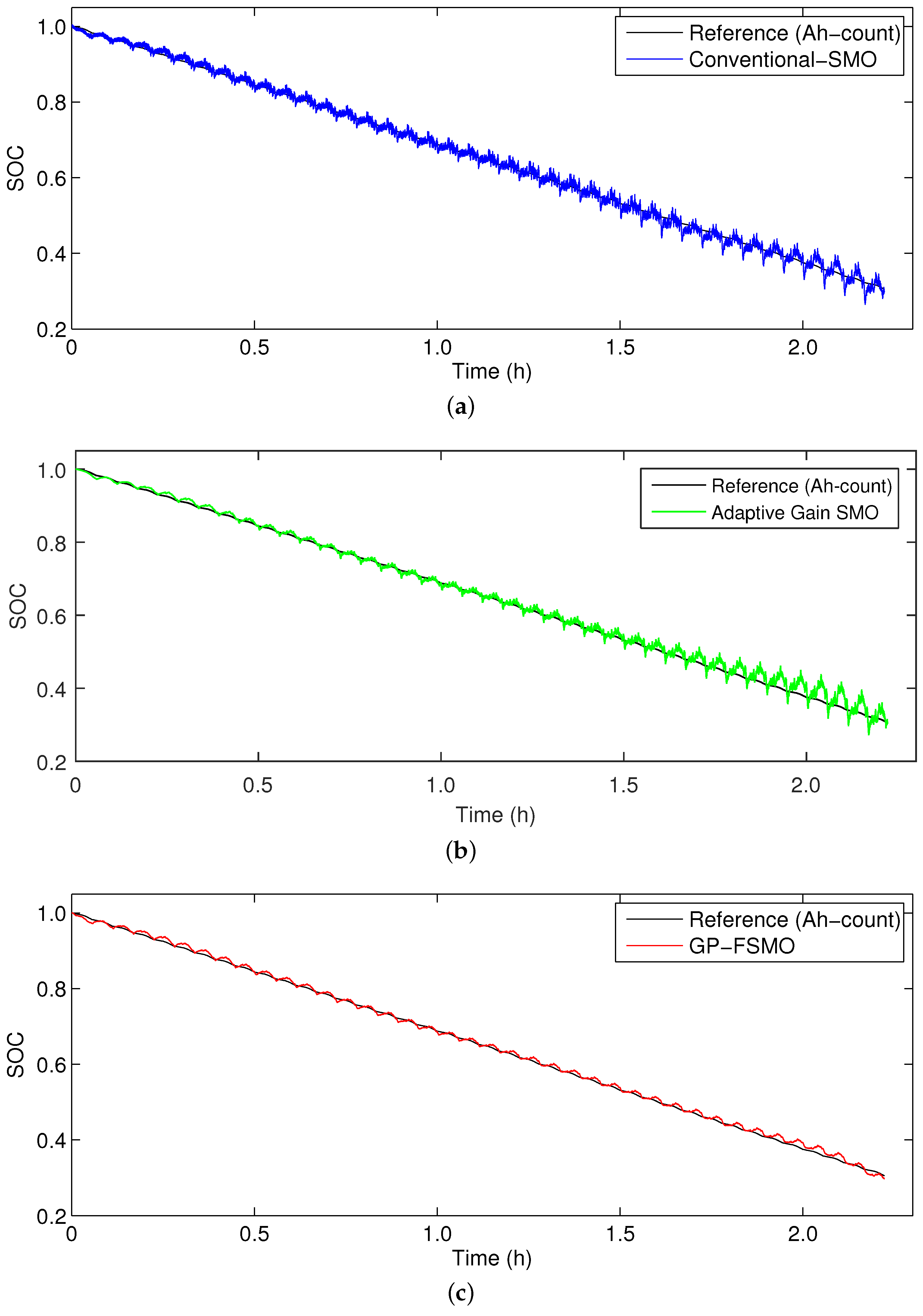
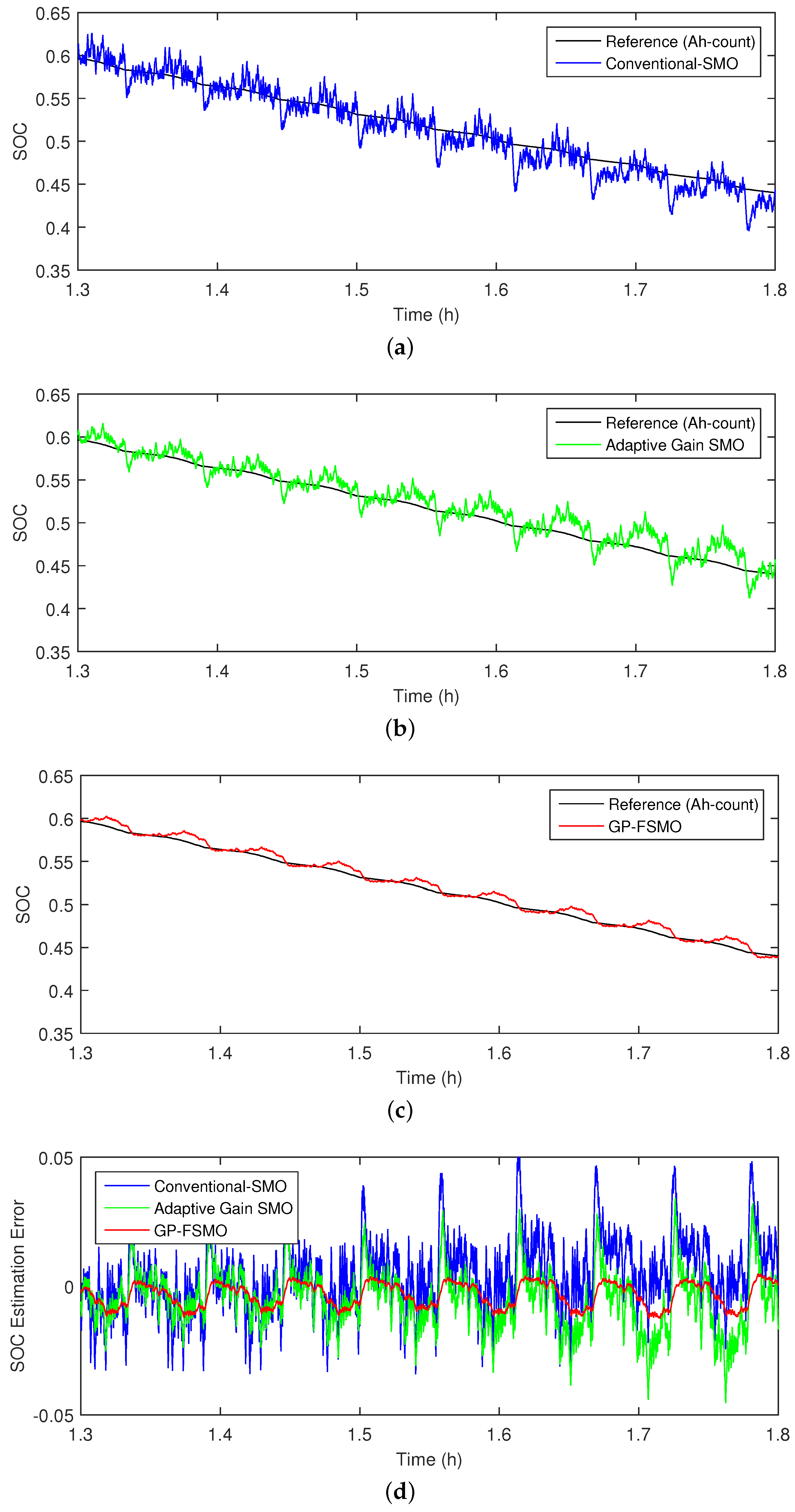
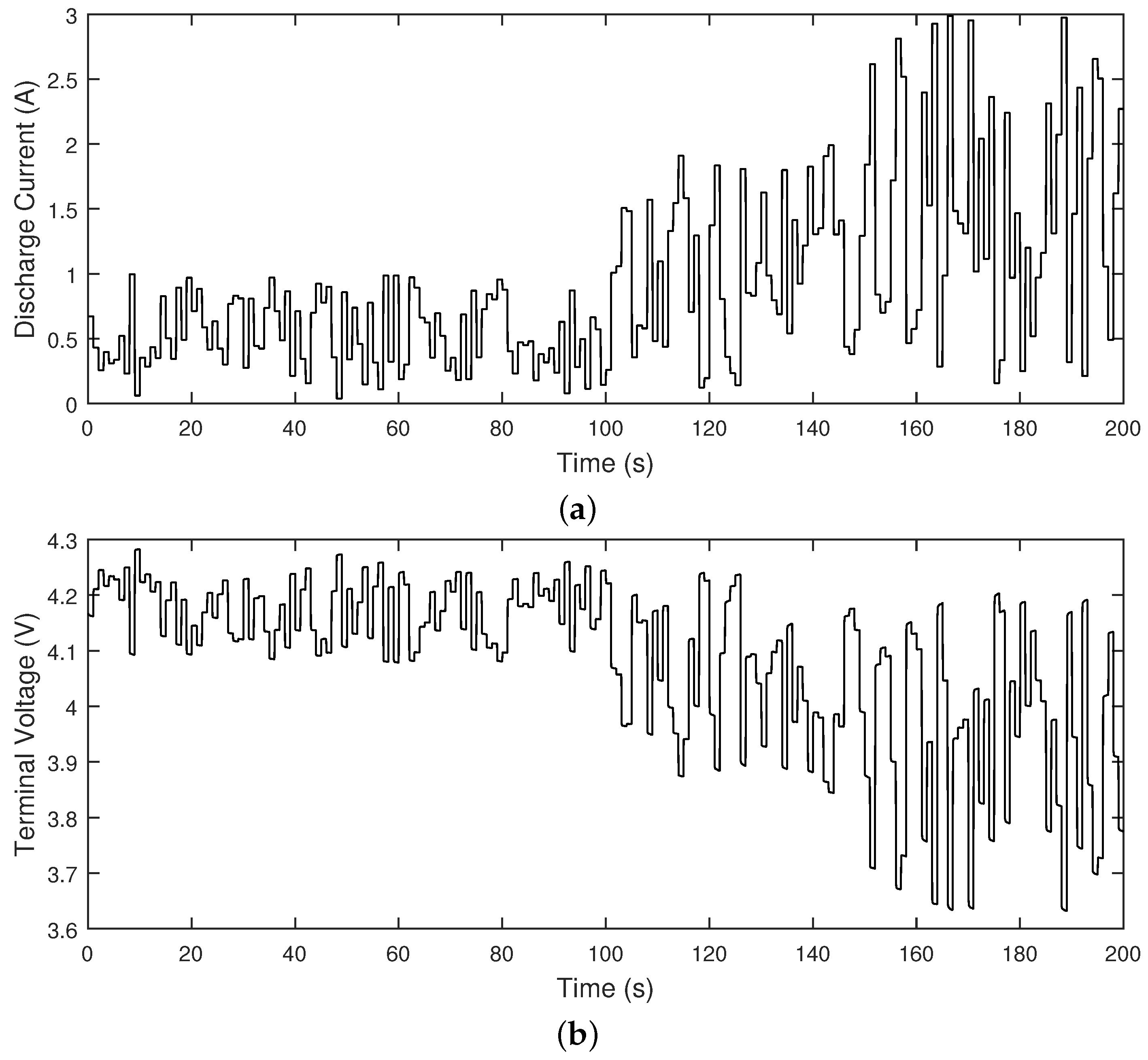
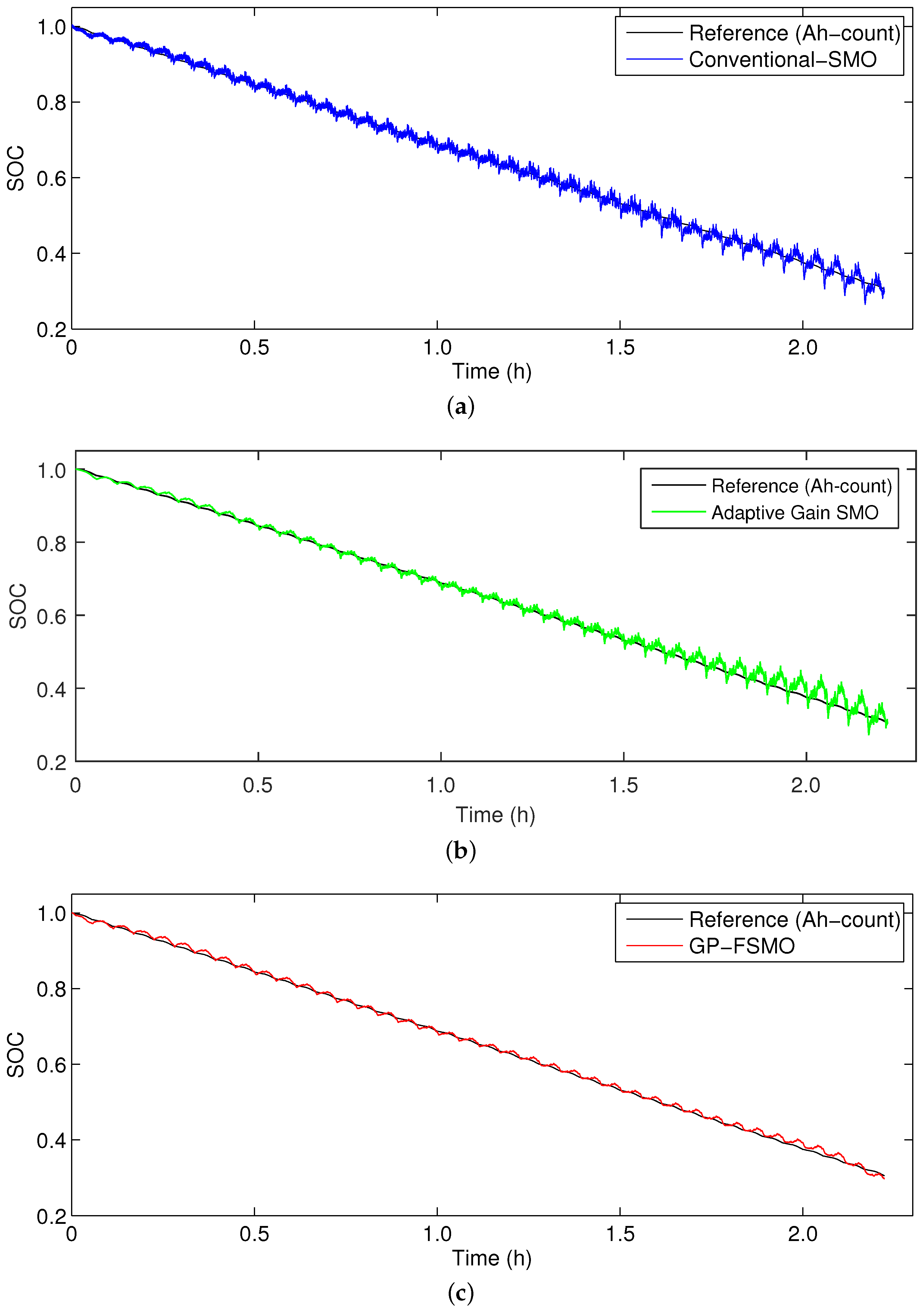
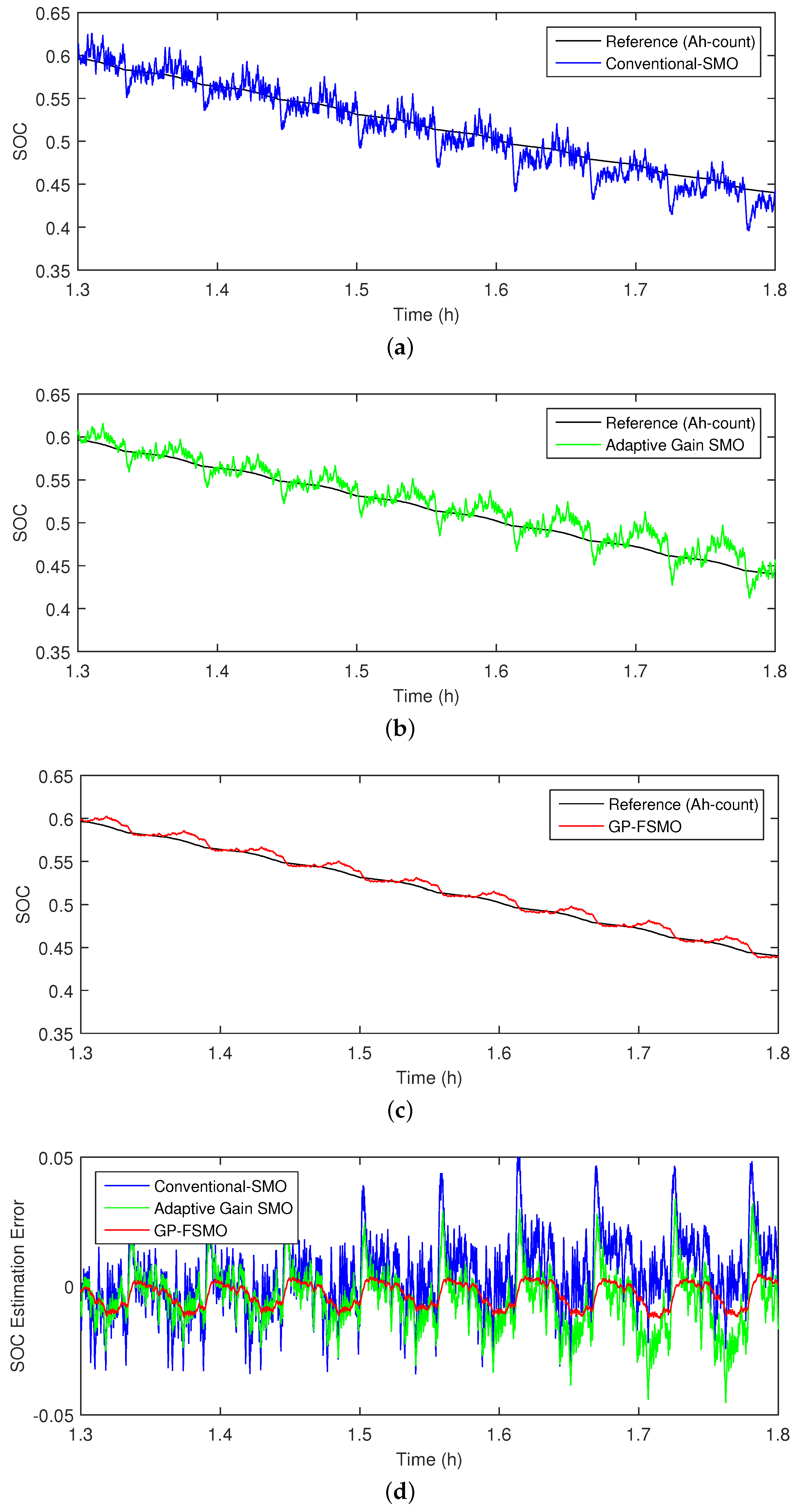
5.3. Random Discharge Current Test
| SOC Range | Error | Methods | ||
|---|---|---|---|---|
| Conventional SMO | Adaptive Gain SMO | GP-FSMO | ||
| 100% to 65% | Maximum | 2.81 | 1.41 | 1.29 |
| Mean | 1.91 | 1.42 | 1.27 | |
| 65% to 30% | Maximum | 5.72 | 4.82 | 2.13 |
| Mean | 3.42 | 3.31 | 1.78 | |
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lu, L.; Han, X.; Li, J.; Hua, J.; Ouyang, M. A review on the key issues for lithium-ion battery management in electric vehicles. J. Power Sources 2013, 226, 272–288. [Google Scholar] [CrossRef]
- Waag, W.; Fleischer, C.; Sauer, D.U. Critical review of the methods for monitoring of lithium-ion batteries in electric and hybrid vehicles. J. Power Sources 2014, 258, 321–339. [Google Scholar] [CrossRef]
- Ng, K.S.; Moo, C.S.; Chen, Y.P.; Hsieh, Y.C. Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries. Appl. Energy 2009, 86, 1506–1511. [Google Scholar] [CrossRef]
- Charkhgard, M.; Farrokhi, M. State-of-charge estimation for lithium-ion batteries using neural networks and EKF. IEEE Trans. Ind. Electron. 2010, 57, 4178–4187. [Google Scholar] [CrossRef]
- Kang, L.; Zhao, X.; Ma, J. A new neural network model for the state-of-charge estimation in the battery degradation process. Appl. Energy 2014, 121, 20–27. [Google Scholar] [CrossRef]
- Sheng, H.; Xiao, J. Electric vehicle state of charge estimation: Nonlinear correlation and fuzzy support vector machine. J. Power Sources 2015, 281, 131–137. [Google Scholar] [CrossRef]
- Blanke, H.; Bohlen, O.; Buller, S.; de Doncker, R.W.; Fricke, B.; Hammouche, A.; Linzen, D.; Thele, M.; Sauer, D.U. Impedance measurements on lead–acid batteries for state-of-charge, state-of-health and cranking capability prognosis in electric and hybrid electric vehicles. J. Power Sources 2005, 144, 418–425. [Google Scholar] [CrossRef]
- Xu, J.; Mi, C.C.; Cao, B.; Cao, J. A new method to estimate the state of charge of lithium-ion batteries based on the battery impedance model. J. Power Sources 2013, 233, 277–284. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Bhangu, B.S.; Bentley, P.; Stone, D.A.; Bingham, C.M. Nonlinear observers for predicting state-of-charge and state-of-health of lead-acid batteries for hybrid-electric vehicles. IEEE Trans. Veh. Technol. 2005, 54, 783–794. [Google Scholar] [CrossRef]
- Vasebi, A.; Partovibakhsh, M.; Bathaee, S.M.T. A novel combined battery model for state-of-charge estimation in lead-acid batteries based on extended Kalman filter for hybrid electric vehicle applications. J. Power Sources 2007, 174, 30–40. [Google Scholar] [CrossRef]
- Hu, X.; Li, S.; Peng, H.; Sun, F. Robustness analysis of State-of-Charge estimation methods for two types of Li-ion batteries. J. Power Sources 2012, 217, 209–219. [Google Scholar] [CrossRef]
- Dai, H.; Wei, X.; Sun, Z.; Wang, J.; Gu, W. Online cell SOC estimation of Li-ion battery packs using a dual time-scale Kalman filtering for EV applications. Appl. Energy 2012, 95, 227–237. [Google Scholar] [CrossRef]
- Kim, I.S. Nonlinear state of charge estimator for hybrid electric vehicle battery. IEEE Trans. Power Electron. 2008, 23, 2027–2034. [Google Scholar] [CrossRef]
- Chen, X.; Shen, W.; Cao, Z.; Kapoor, A. Adaptive gain sliding mode observer for state of charge estimation based on combined battery equivalent circuit model. Comput. Chem. Eng. 2014, 64, 114–123. [Google Scholar] [CrossRef]
- Utkin, V.; Lee, H. Chattering problem in sliding mode control systems. In Proceedings of the International Workshop on Variable Structure Systems, VSS’06, Alghero, Sardinia, 5–7 June 2006; pp. 346–350.
- Plestan, F.; Shtessel, Y.; Bregeault, V.; Poznyak, A. New methodologies for adaptive sliding mode control. Int. J. Control 2010, 83, 1907–1919. [Google Scholar] [CrossRef]
- Utkin, V.I.; Poznyak, A.S. Adaptive sliding mode control with application to super-twist algorithm: Equivalent control method. Automatica 2013, 49, 39–47. [Google Scholar] [CrossRef]
- Leu, V.Q.; Choi, H.H.; Jung, J.W. Fuzzy sliding mode speed controller for PM synchronous motors with a load torque observer. IEEE Trans. Power Electron. 2012, 27, 1530–1539. [Google Scholar] [CrossRef]
- Roopaei, M.; Jahromi, M.Z.; Jafari, S. Adaptive gain fuzzy sliding mode control for the synchronization of nonlinear chaotic gyros. Chaos Interdiscip. J. Nonlinear Sci. 2009, 19. [Google Scholar] [CrossRef] [PubMed]
- Fayazi, A.; Rafsanjani, H.N. Fractional order fuzzy sliding mode controller for robotic flexible joint manipulators. In Proceedings of the 2011 9th IEEE International Conference on Control and Automation (ICCA), Santiago, Chile, 19–21 December 2011; pp. 1244–1249.
- Deng, J.L. Introduction to grey system theory. J. Grey Syst. 1989, 1, 1–24. [Google Scholar]
- Huang, S.J.; Huang, C.L. Control of an inverted pendulum using grey prediction model. IEEE Trans. Ind. Appl. 2000, 36, 452–458. [Google Scholar] [CrossRef]
- Lian, R.J.; Lin, B.F.; Huang, J.H. A grey prediction fuzzy controller for constant cutting force in turning. Int. J. Mach. Tools Manuf. 2005, 45, 1047–1056. [Google Scholar] [CrossRef]
- Kayacan, E.; Oniz, Y.; Kaynak, O. A grey system modeling approach for sliding-mode control of anti-lock braking system. IEEE Trans. Ind. Electron. 2009, 56, 3244–3252. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding mode control design principles and applications to electric drives. IEEE Trans. Ind. Electron. 1993, 40, 23–36. [Google Scholar] [CrossRef]
- Li, D.C.; Yeh, C.W.; Chang, C.J. An improved grey-based approach for early manufacturing data forecasting. Comput. Ind. Eng. 2009, 57, 1161–1167. [Google Scholar] [CrossRef]
- Liu, S.; Lin, Y.; Forrest, J.Y.L. Grey Systems: Theory and Applications; Springer: New York, NY, USA, 2010; Volume 68. [Google Scholar]
- Chang, S.C.; Lai, H.C.; Yu, H.C. A variable P value rolling Grey forecasting model for Taiwan semiconductor industry production. Technol. Forecast. Soc. Chang. 2005, 72, 623–640. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.; Goh, T.; Park, M.; Kim, S.W. Fuzzy Sliding Mode Observer with Grey Prediction for the Estimation of the State-of-Charge of a Lithium-Ion Battery. Energies 2015, 8, 12409-12428. https://doi.org/10.3390/en81112327
Kim D, Goh T, Park M, Kim SW. Fuzzy Sliding Mode Observer with Grey Prediction for the Estimation of the State-of-Charge of a Lithium-Ion Battery. Energies. 2015; 8(11):12409-12428. https://doi.org/10.3390/en81112327
Chicago/Turabian StyleKim, Daehyun, Taedong Goh, Minjun Park, and Sang Woo Kim. 2015. "Fuzzy Sliding Mode Observer with Grey Prediction for the Estimation of the State-of-Charge of a Lithium-Ion Battery" Energies 8, no. 11: 12409-12428. https://doi.org/10.3390/en81112327
APA StyleKim, D., Goh, T., Park, M., & Kim, S. W. (2015). Fuzzy Sliding Mode Observer with Grey Prediction for the Estimation of the State-of-Charge of a Lithium-Ion Battery. Energies, 8(11), 12409-12428. https://doi.org/10.3390/en81112327