1. Introduction
A lithium-ion battery is a critical component of power systems in satellites, hybrid electric vehicles, and portable electronic devices because of its desirable characteristics, such as high energy density, absence of memory effect, low loss of electrical energy, and long service time [
1,
2]. Nevertheless, the failure of a lithium-ion battery may result in operational disability, or even catastrophic failure of the entire system. As such, the state of health (SOH) of online lithium-ion batteries, which have widespread applications and high reliability requirement, must be monitored.
Battery capacity is a main indicator of cell aging, and monitoring of the actual capacity values can be used for SOH evaluation [
1]. However, the monitoring process is challenging for data collection of online capacity because internal state variables are inaccessible via general sensors [
3]. Additionally, battery capacity is related to several easily measurable features. Consequently, estimation techniques should be applied on indirect indicators for online capacity estimation. In the literature [
3,
4], degradation features were extracted from a charge process or a discharge step. Sometimes, feature extraction was based on the full charging/discharging state of a battery [
5], thereby ignoring partial charge/discharge states during operation. In addition, continuous monitoring of varying variables, such as charge voltage in a constant current (CC) charge step and charge current in a constant voltage (CV) charge step is time consuming and expensive. In this paper, six novel features are extracted from charge/discharge (C-D) cycles with consideration of the partial discharging state and convenient data collection during online operation.
To model the complex and nonlinear dependency between multiple features and battery capacity, scholars have applied various intelligent data-driven methods for online capacity estimation, such as neural network (NN) [
6,
7,
8], support vector machine (SVM) [
9,
10,
11,
12], and relevance vector machine (RVM) [
4,
13]. The NN approach can be used to establish a network to characterize the relationship among various inputs (
i.e., current, voltage, and temperature) and outputs (
i.e., capacity). However, a large number of diverse data should be used to ensure the effectiveness of the NN approach [
14]. In addition, SVM is a state-of-the-art technique for capacity estimation, particularly under the condition of small training samples, but this method suffers from several limitations. Tipping [
15] reported that SVM outputs are not probabilistic and cannot capture the uncertainty in estimations; moreover, the number of support vectors to be employed increases with the increasing size of training data. RVM [
15] is a sparse Bayesian approach that does not suffer from the abovementioned limitations and exhibits higher generalizability than SVM. Nevertheless, RVM is sensitive to training data coherence. To improve the generalization performance of RVM, a previous study proposed the use of multi-kernel relevance vector machine (MKRVM) [
16]. Fei
et al. [
17] utilized MKRVM to predict the state of bearings. The perturbations of parameters in MKRVM may strongly affect the performance of this method; hence, in the present study, an adaptive MKRVM (AMKRVM) is built based on accelerated particle swarm optimization (APSO) to automatically optimize the parameter settings of MKRVM. Compared with traditional particle swarm optimization (PSO), APSO can accelerate convergence and simplify implementation [
18]. The comparison results further show the accuracy, robustness, and generalizability of the AMKRVM.
This paper proposes a comprehensive procedure, which contains offline and online stages, for online capacity estimation of lithium-ion batteries. In the offline stage, offline data are utilized to train AMKRVM, and verify the generalizability and robustness of the model, thereby ensuring the accuracy of online capacity estimation.
This paper is organized as follows.
Section 2 illustrates the feature extraction method.
Section 3 presents the fundamentals of the proposed AMKRVM model, containing an introduction of MKRVM and APSO.
Section 4 describes the overall procedure of online capacity estimation of a lithium-ion battery. Then,
Section 5 summarizes the experimental procedures and discusses estimation and comparison results. Finally,
Section 6 shows the conclusions.
3. Adaptive Multi-Kernel Relevance Vector Machine
In this section, an adaptive multi-kernel RVM (AMKRVM) model is proposed to utilize the extracted features for estimating the online capacity of lithium-ion batteries. Multi-kernel RVM (MKRVM), whose RVM kernel function is a weighted combination of several basic kernels, is an improved version of the typical RVM model [
15]. To automatically estimate the unknown parameters in MKRVM model, the APSO algorithm is employed to construct AMKRVM model.
3.1. Multi-Kernel Relevance Vector Machine
For capacity estimation, a set of
N input-target pairs
is given, where
xn ∊
RM indicates the input feature vector,
tn is the real capacity of a battery and
M is the dimensionality of
xn. The real capacity value
tn ∊
R is a noisy output of the function
y(
xn) with the input feature vector
xn; hence,
where ε
n refers to the measurement errors or noise. A flexible and popular set of candidates for
y(
·) is presented in the form of
where ω = (ω
1, ω
2,…, ω
N)
T is the weight vector,
K(
x,
xi) is the kernel function, and ω
0 is the bias. Assuming that independent measurement errors ε
n follow a mean-zero Gaussian distribution with variance σ
2 and the target
tn is independent, the likelihood of the given data set is
where
t = (
t1,
t2,…,
tN)
T, and Φ = [
(
x1),…,
(
xN)]
T is a
N × (
N + 1) design matrix with
(
xn) = [1,
Kmix(
xn,
x1),…,
Kmix(
xn,
xN)]
T. To avoid the over-fitting phenomenon caused by the maximum-likelihood estimation of ω and σ
2, Tipping [
15] adopted a Bayesian perspective by defining a prior distribution over ω as
where α = (α
1, α
2,…, α
N) is a (
N + 1) vector of independent hyper-parameters. To complete the hierarchical Bayesian model, we assume that hyper-priors over scale parameters α and σ
2 follow Gamma distributions.
According to Bayes rule, the total posterior over all unknown parameters is
The posterior distribution of weights can be obtained from Bayes’s rule:
where the posterior covariance and mean are, respectively,
where β = σ
−2 and A = diag(α
1, α
2,…, α
N).
Relevance vector learning thus maximizes the posterior distribution of the hyper parameters:
. Therefore, it only needs to maximize the marginal likelihood
as
The most-probable estimation of α and σ
2, denoted as α
MP and
, respectively, can be obtained by iteratively maximizing the marginal likelihood
. The iterative formulas to update α and σ
2 are
where Σ
ii is the
i-th diagonal element of the posterior weight covariance
.
In RVM, the kernel function makes it possible to get linearly learning algorithms to learn a nonlinear function. The kernel function significantly influences the RVM performance. Thus, an appropriate kernel function for regression should be selected. To trade off the requirements for generalizability and estimation accuracy of RVM, a previous study proposed MKRVM [
16]. In MKRVM, each kernel function is a linear combination of different basic kernels. A typical multi-kernel function is a combination of a radial basic function (RBF) kernel and a polynomial kernel because the former is local and the latter is global. Given a set of
N observations
xi (
i = 1, 2,…,
N), the RBF kernel is written as:
where
r is a predefined parameter called kernel width. The polynomial kernel is defined as:
where
s is the parameter of the polynomial kernel. The multi- kernel function can be written as
where ρ ∊ [0, 1] is called as controlled parameter.
3.2. Adaptive Multi-Kernel Learning Based on APSO
The performance and sparsity of MKRVM are dependent on the appropriate choice of kernel functions and their parameters. Determining the optimal combination of the unknown parameters (
r,
s, ρ) in the multi-kernel function is a nonlinear optimization problem. The fixed multi-kernel parameters cannot ensure the performance of MKRVM on all datasets of batteries that operates under different conditions. Thus, we propose an adaptive MKRVM (AMKRVM) based on APSO [
32] to automatically select multi-kernel parameters during training. APSO is an improved version of traditional PSO [
33] and exhibits global optimization capability, simplicity, and ease of implementation [
34]. APSO can accelerate the convergence of the algorithm. In addition, APSO can shorten search time and promote method efficiency since the inputs of MKRVM are multi-dimensional feature vectors.
Fei
et al. [
17] used the root-mean-square error (RMSE) of regression results during the RVM training to be the objective function for parameter optimization. This objective function produces accurate regression results but weakens the generalizability of MKRVM, leading to the over-fitting phenomenon. In this paper, the marginal likelihood
in Equation (11) is therefore adopted to construct the objective function as
In APSO, a particle represents a candidate combination of unknown parameters (r, s, ρ). For each particle, the corresponding value of the objective function is called as fitness value. Parameters in a particle have wide ranges, which construct the search space where particles can freely walk. The procedure of APSO is summarized as follows:
Step 1: Generate a large swarm of particles of size P at random and initialize the parameters in APSO.
Step 2: Calculate the fitness value of each particle by Equation (17).
Step 3: Given a predefined maximum number of iterations denoted as
MaxInt, repeat the following steps for
q = 1, 2, …,
MaxInt:
Update the optimal global solution found for far, denoted as g*.
Calculate the velocity of each particle by the following formula:
where
vp is the velocity of
p-th particle;
c1 and
c2 are the learning factors or acceleration coefficients. Here, ξ is generated from the standard normal distribution.
- c.
Update position of each particle using:
where
xp is the position of
p-th particle.
In the APSO algorithm, the maximum number of iterations, particle size, and learning factors should be initialized. By adopting the marginal likelihood as the objective function, we can use the proposed APSO to automatically and rapidly determine the optimal kernel parameters during the MKRVM training.
4. Overall Procedure for Capacity Estimation
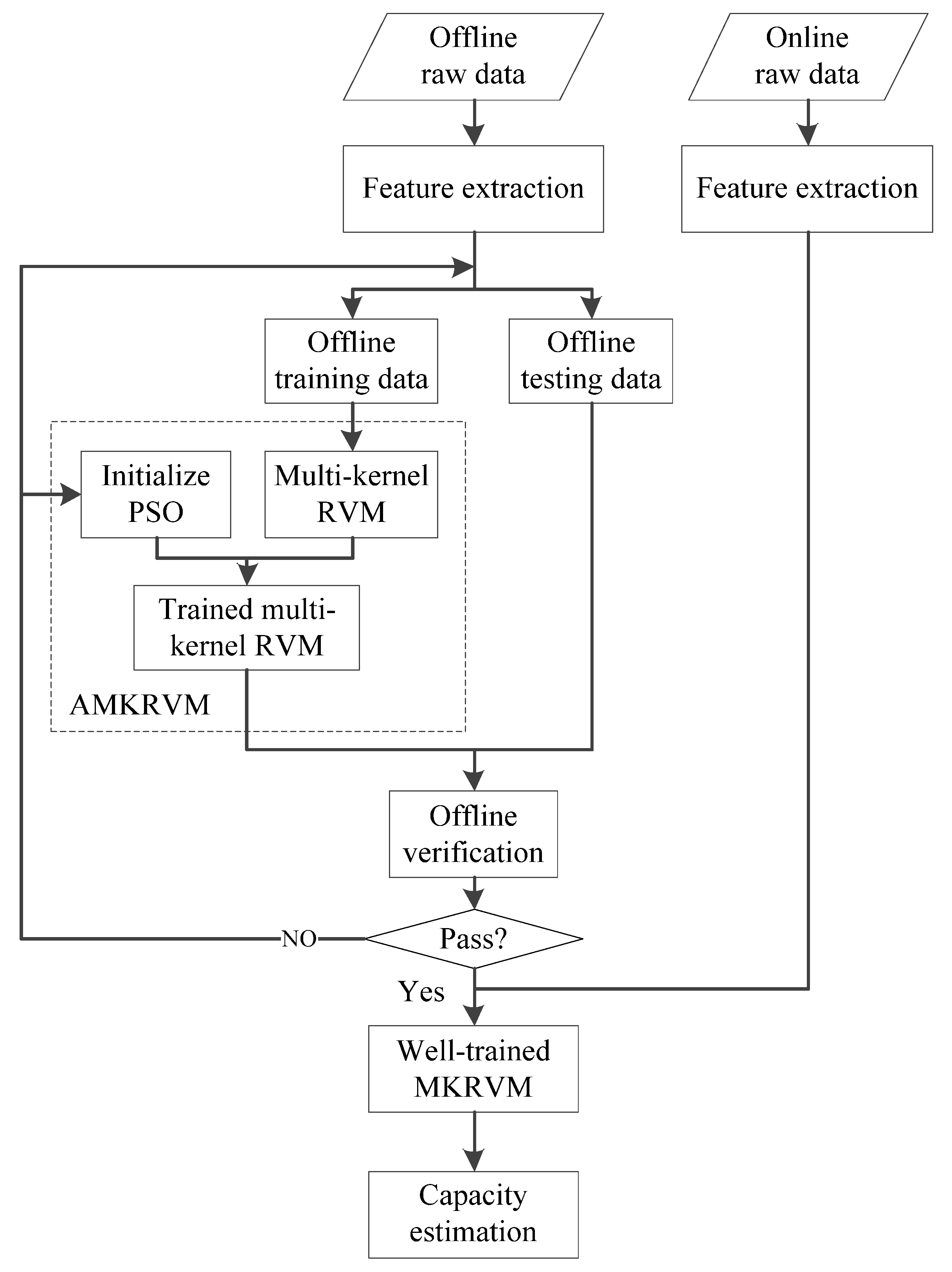
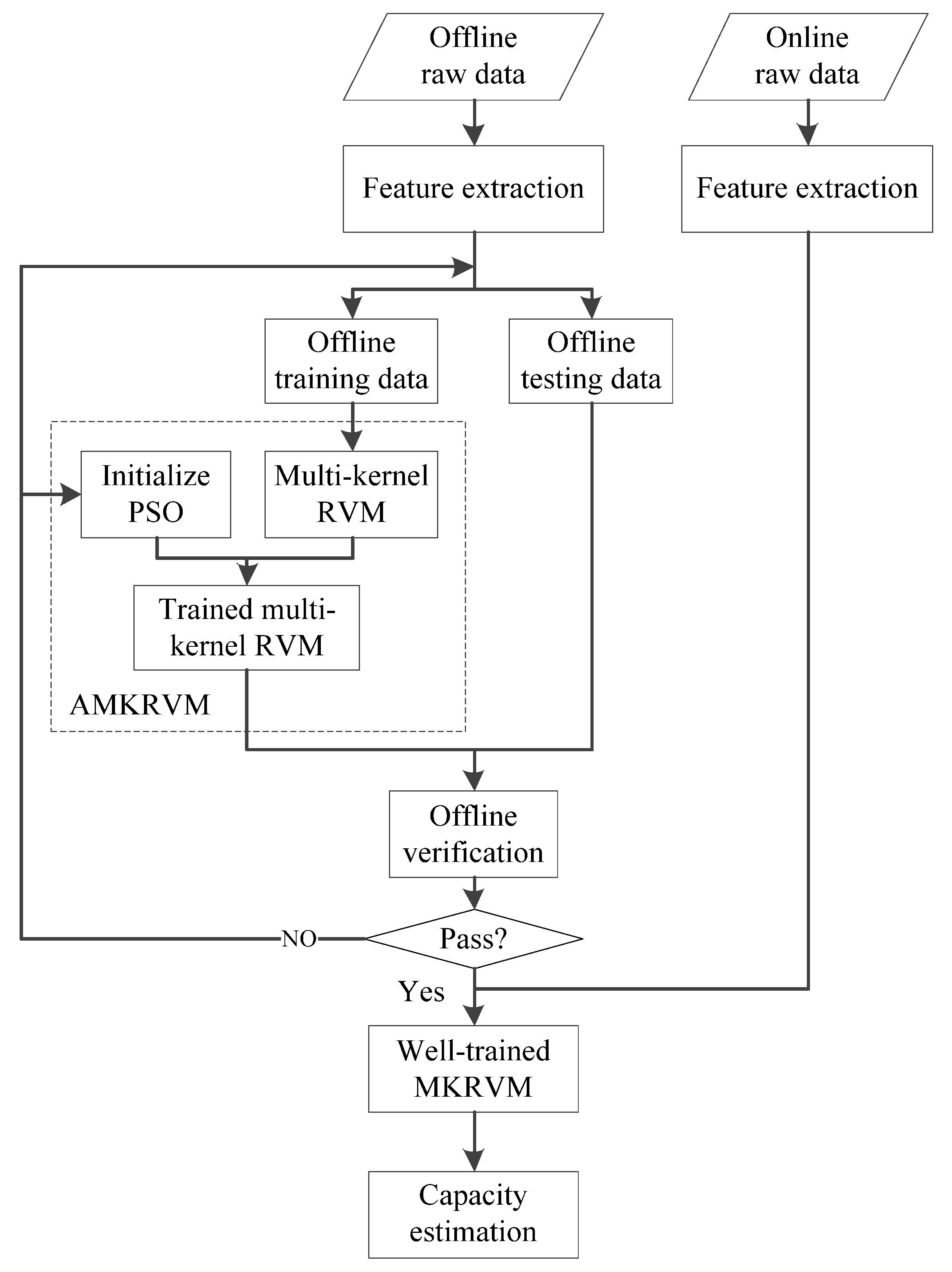
The overall procedure of the proposed method for online capacity estimation is shown in
Figure 4. The procedure consists of two modules: offline and online stages.
Offline data are traditionally used only to determine unknown parameters in a specific model for online capacity estimation [
21]. In this paper, a supervised learning process is proposed to utilize part of the offline data to ensure the generalizability of the model. In the proposed offline stage, the degradation features are extracted from the offline raw data. The processed offline data are then divided into two parts, one part for AMKRVM training and the other part for offline verification. Training data are used to determine the optimal combination of the kernel parameters in MKRVM via the APSO method. However, training is an MKRVM regression process. Training data can be utilized to measure regression accuracy, but not to test the generalizability of MKRVM. Even if the objective function in Equation (17) is adopted to avoid the over-fitting phenomenon to a great extent, the local optimization of the kernel parameters cannot be completely avoided. Prior to APSO implementation, several parameters that affect the APSO performance should be initialized. For example, the initial maximum iteration and particle size considerably influences the running time and convergence of the method, whereas the learning factors affect the search ability of APSO. Thus, we establish a supervised learning step in the offline stage. Part of the offline data is used to verify the generalizability of the trained MKRVM. According to the offline test results and a certain verification criterion, parameter settings in the APSO algorithm can be adjusted to achieve time saving and global optimum, and ensure the usability of MKRVM for online applications.
During the online stage, online data with well-trained and verified MKRVM are employed for online capacity estimation.
Figure 4.
Overall procedure for capacity estimation.
Figure 4.
Overall procedure for capacity estimation.
5. Experimental Results and Discussion
5.1. Data Sources
In the experiments presented in
Section 2.1, the lithium-ion batteries used had the same specification and ambient temperature within batches. However, experimentation on different batteries was conducted at different discharge levels, and the discharge current varied among different batches. The data from three batches are utilized to verify the robustness and universality of the proposed model. Detailed information on the data sources is listed in
Table 3. As the ambient temperature is the same within a batch, this parameter is not further considered in the model. AMKRVM is separately trained and tested based on each batch.
The total number of C-D cycles of batteries in the three batches was 168, 40 and 72, respectively. However, battery 18 only had 140 cycles. Furthermore, the third batch had three outliers in the raw data. For battery Nos. 45–48, the discharge steps were terminated too early after 20, 54, and 66 C-D cycles, at voltage levels of 3.45, 3.31 and 3.457 V, respectively. The corresponding capacity values were measured as zero by mistake. Thus, before using the data of the third batch, these outliers should be removed.
Table 3.
Detailed information on data sources.
Table 3.
Detailed information on data sources.
| Batch | Battery No. | Ambient Temperature (°C) | Cutoff Voltage (V) | Discharge Current (A) |
|---|
| 1st | 5, 6, 7, 18 | 24 | 2.7, 2.5, 2.2, 2.5 | 2 |
| 2nd | 29, 30, 31, 32 | 43 | 2.0, 2.2, 2.5, 2.7 | 4 |
| 3rd | 45, 46, 47, 48 | 4 | 2.0, 2.2, 2.5, 2.7 | 1 |
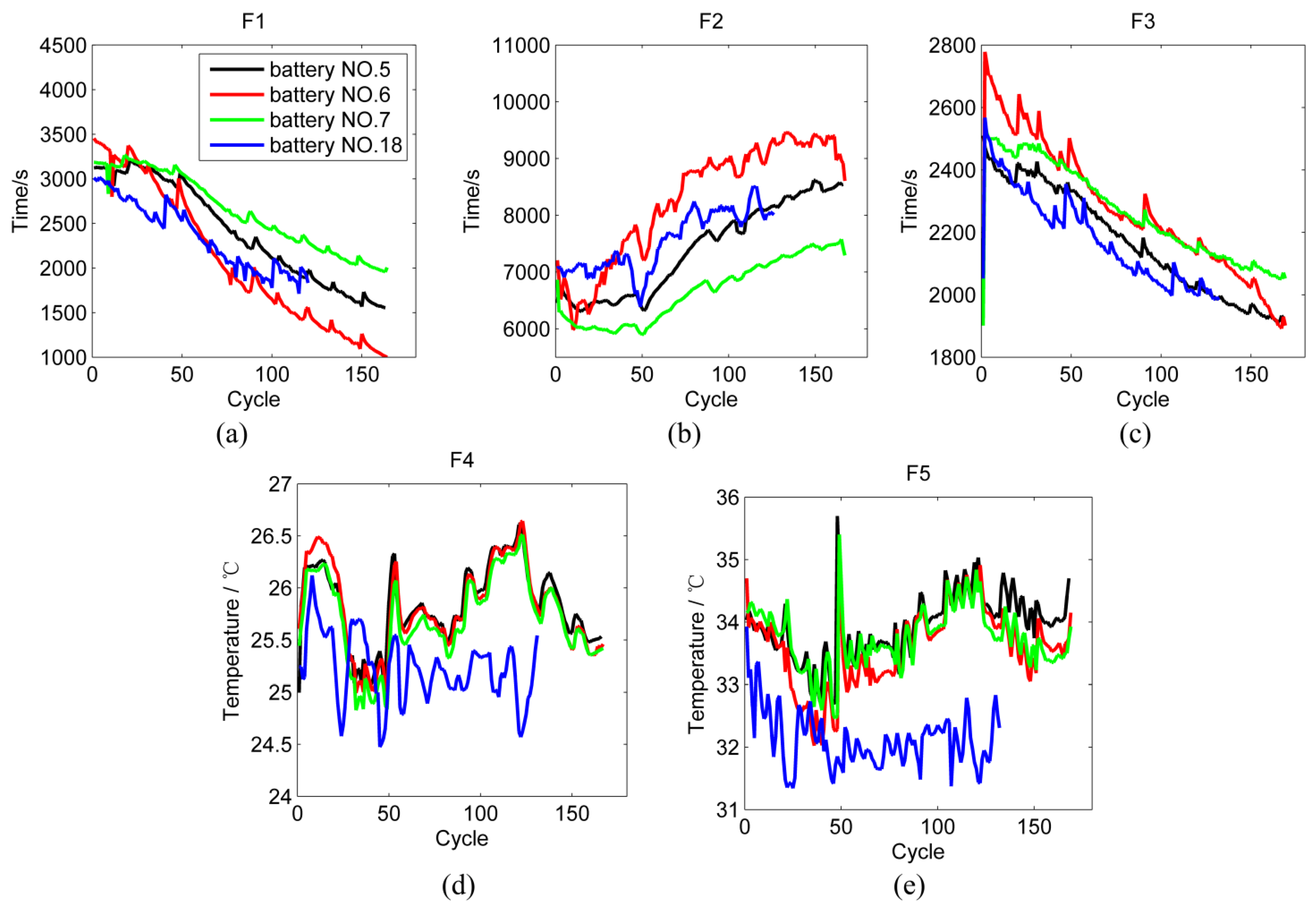
5.2. Battery Features and Analysis
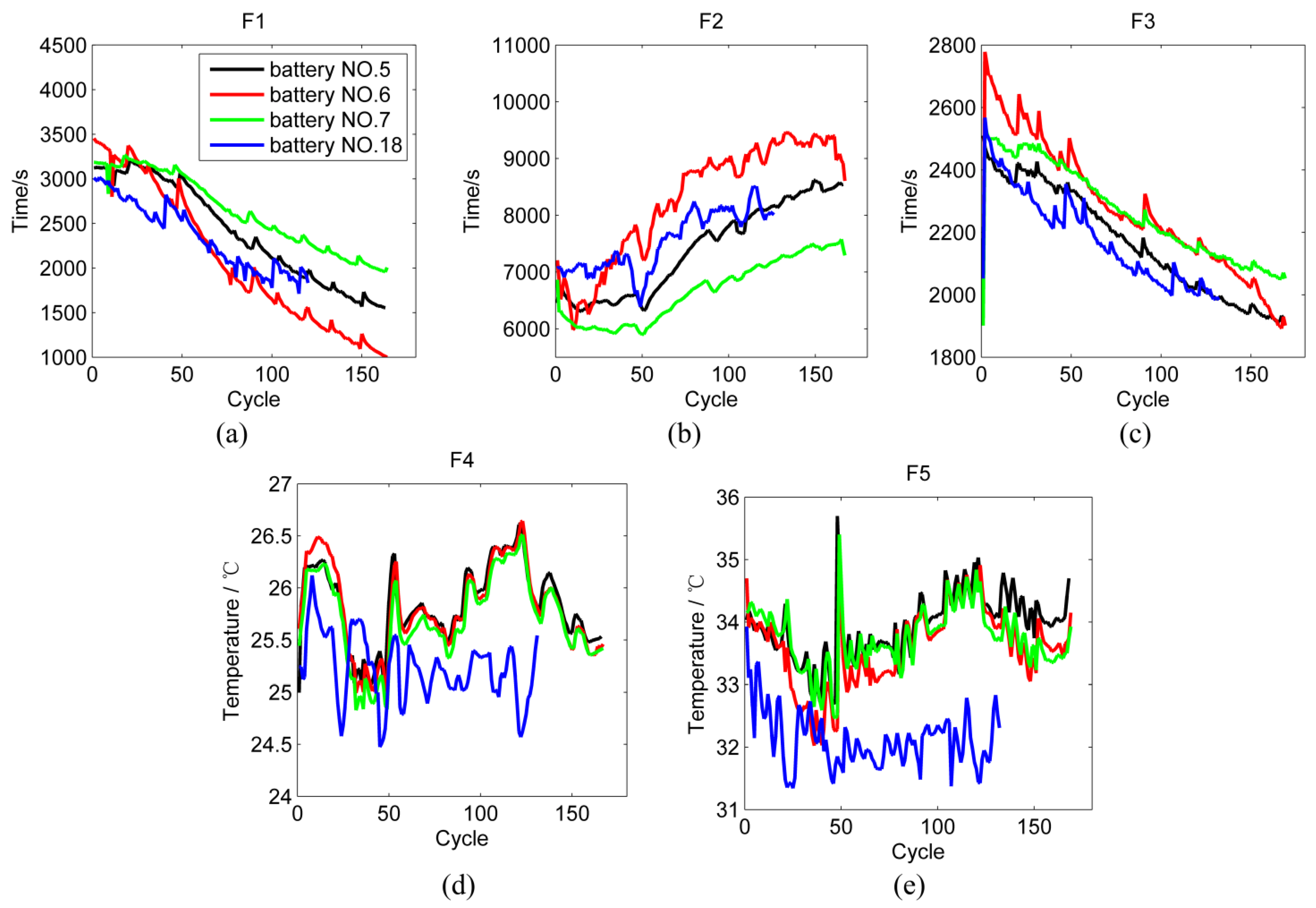
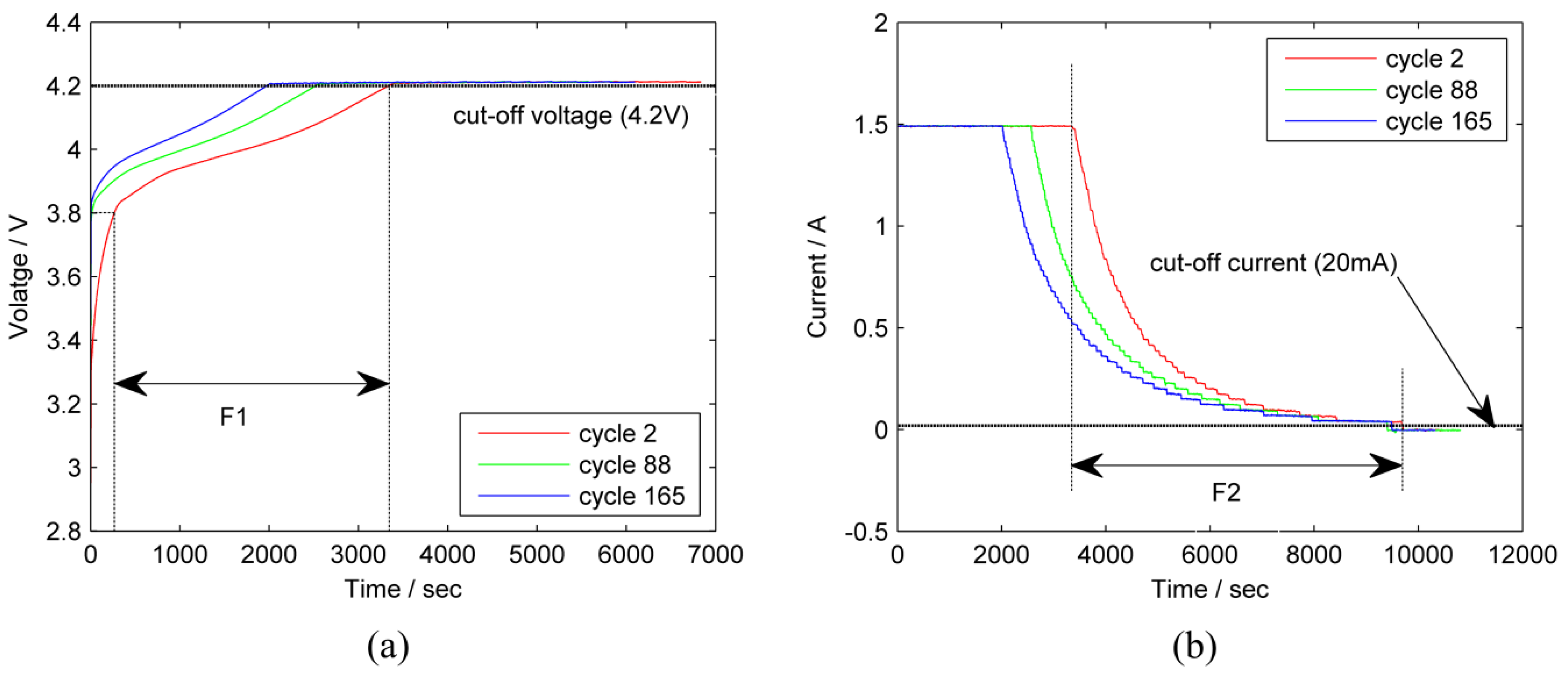
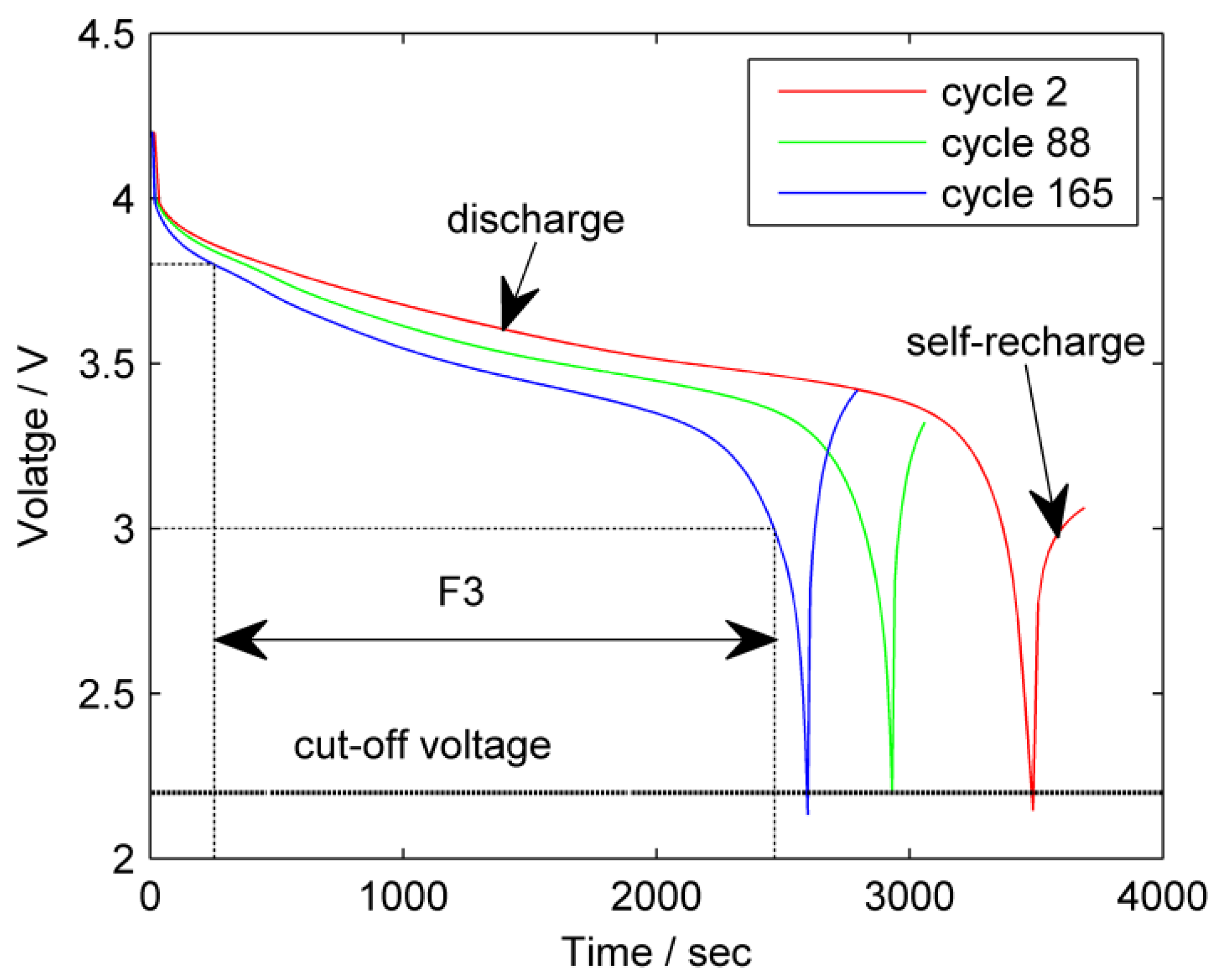
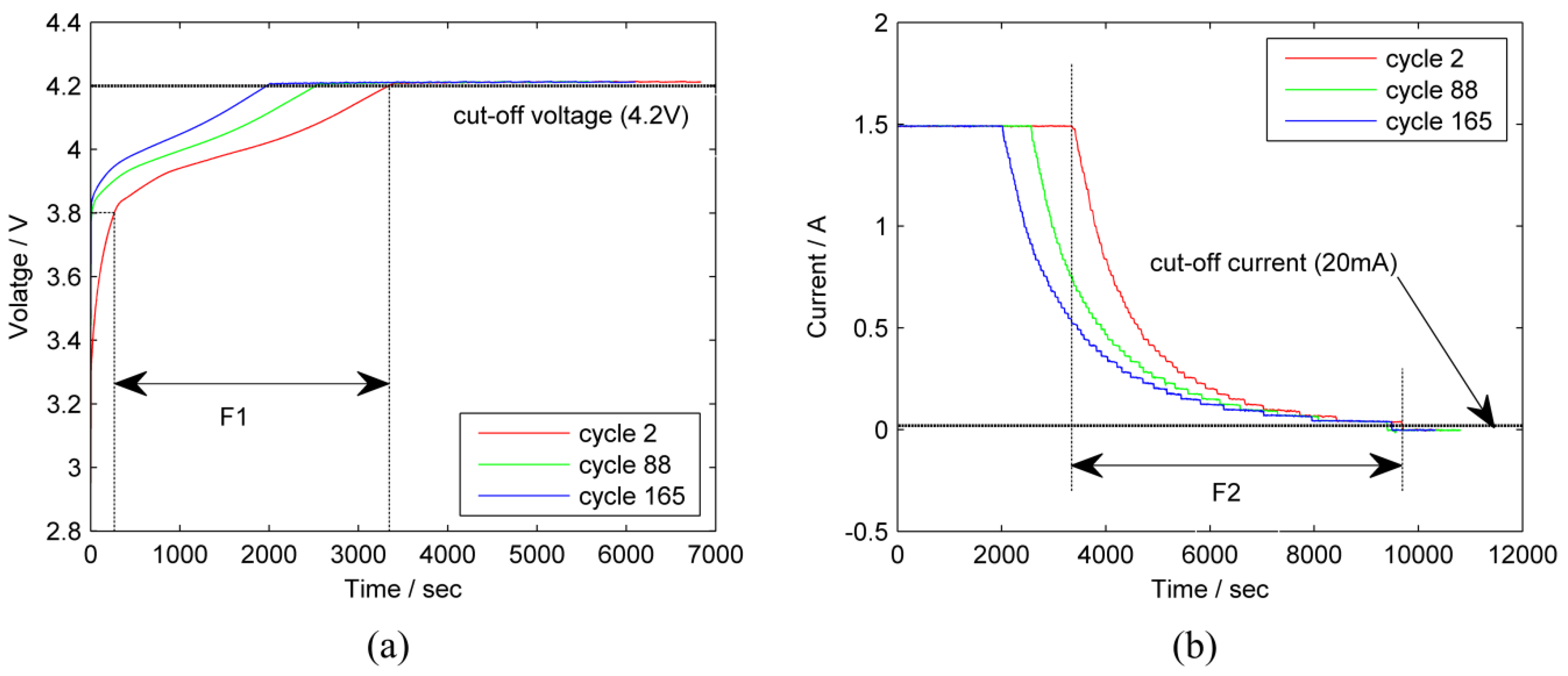
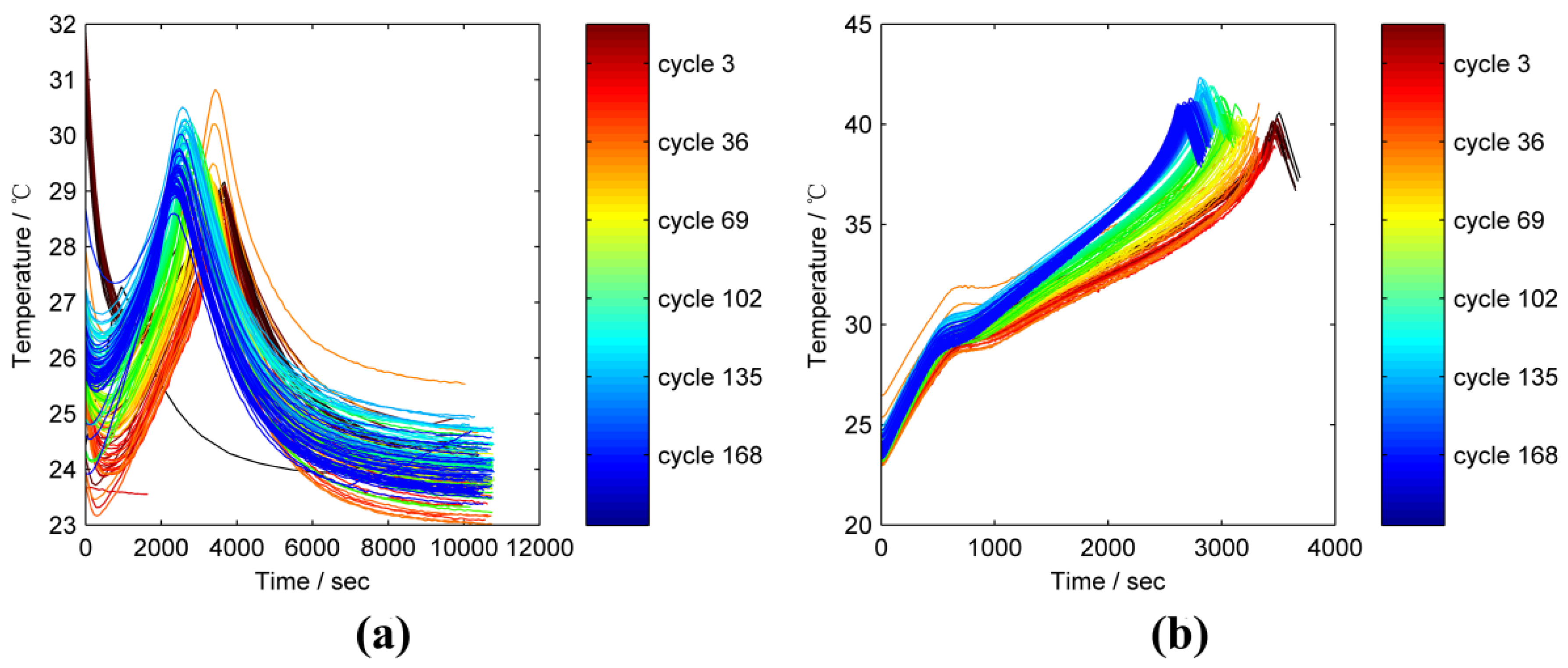
Considering the partial discharge during on-line operation,
F1 is set to be the time interval in which the charge voltage increases from 2.7 to 4.2 V, and
F3 is the time interval in which the discharge voltage decreases from 3.7 to 2.7 V. For example, the results of feature extraction of batteries in the first batch are given in
Figure 5.
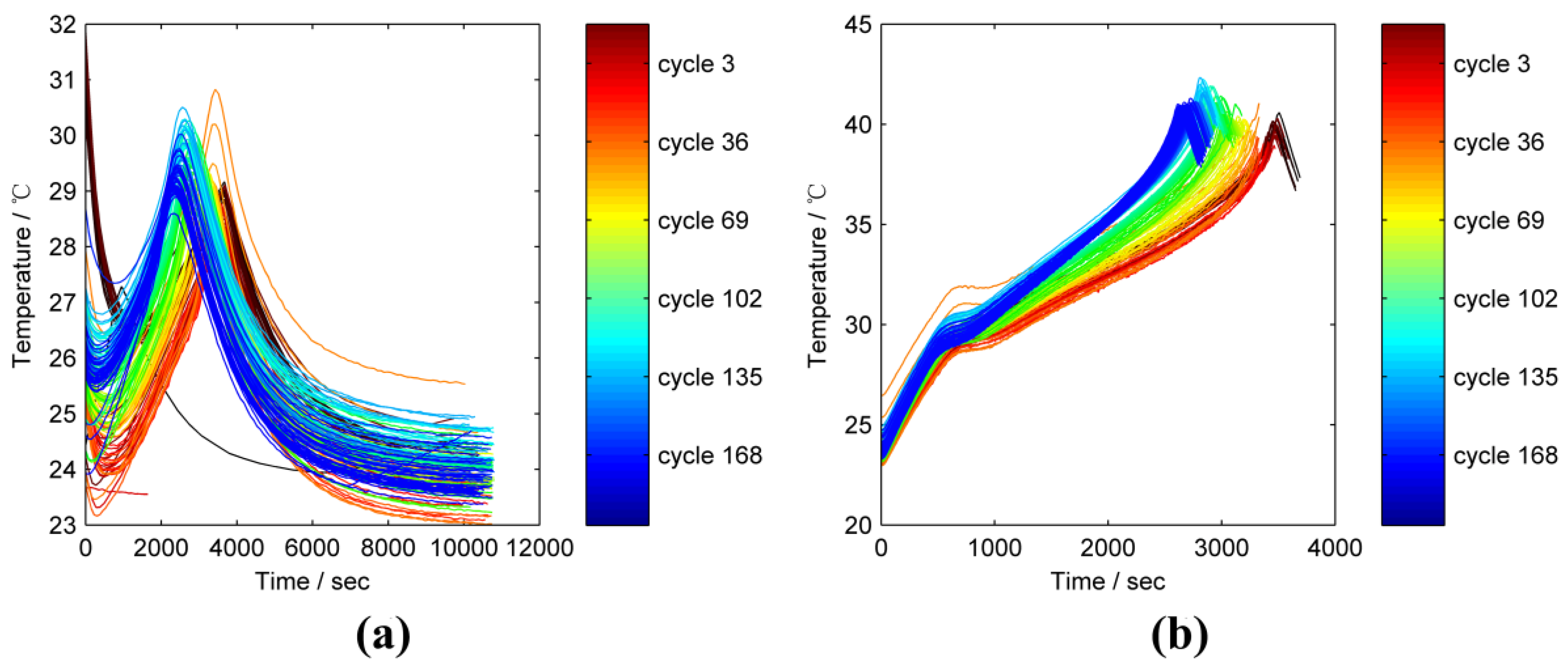
In
Figure 5d,e,
Tc and
Td change nonlinearly and non-monotonically over time. According to the heat-generation equation proposed by Bernard
et al. [
35]:
where
Q is the heat generated during battery operation;
T is the temperature;
,
Voltotal,
Voc, and
V denote the current, total volume, open-circuit, and working voltage of the battery, respectively. According to Equation (20), the generated heat
Q contrarily decreases with increasing temperature. Pals and Newman [
36] proved that the heat-generation rate is higher for low temperatures than for high temperatures. Thus, the temperature of a battery does not keep rising during C-D cycles and must be considered because it influences the battery capacity.
Figure 5.
The curves of the first five features of batteries in the first batch. (a) Feature F1; (b) Feature F2; (c) Feature F3; (d) Feature F4; (e) Feature F5.
Figure 5.
The curves of the first five features of batteries in the first batch. (a) Feature F1; (b) Feature F2; (c) Feature F3; (d) Feature F4; (e) Feature F5.
5.3. Capacity Estimation Results and Discussion
In each batch, the first three batteries provide offline data, and the last one provides online data. During training and verification, all input features and output capacity are normalized to the interval [0, 1]. Estimation results are presented below.
5.3.1. Evaluation Criterion
Three evaluation criteria are used to measure the performance and accuracy of the proposed approach.
- (1)
Root mean square error (RMSE) is a good measure of local accuracy, used to compare the estimation errors of the model:
- (2)
Mean relative error (MRE) compares how incorrect a quantity is from an estimated capacity considered to be true:
- (3)
Coefficient of determination (R2): indicates the fitness of data in a statistical model and gives information about the goodness of fit of a model. If the estimation is accurate, R2 will be close to 1.
where
Ci is the actual capacity;
is the estimated capacity;
is the mean value of the estimated capacity; and
Np is the sample size.
5.3.2. Offline Training and Verification
In each batch, the front half data of each battery is used to train AMKRVM, and the back half data are used for verification. In the verification step, the criterion can be established according to engineering requirement. In this case, AMKRVM is assumed well trained if over 90% real capacity values are covered by the 95% confidence intervals (CIs).
The optimal parameters of MKRVM determined by the APSO method are summarized in
Table 4. The optimal values of the three parameters depend on a specific dataset and vary in different batches. Thus, determining the optimal parameters is significant. In the verification step, despite changes in the parameter settings of APSO, the variations in the optimization results are relatively small, showing the robustness of the optimization algorithm. However, through verification steps, the running time can be saved by changing the maximum number of iterations or particle size of APSO on the premise of convergence of the algorithm.
Table 4.
The optimal parameters of the multi-kernel relevance vector machine (MKRVM).
Table 4.
The optimal parameters of the multi-kernel relevance vector machine (MKRVM).
| Batch | Optimal Parameters |
|---|
| r | s | ρ |
|---|
| 1st | 4.60 | 0.92 | 0.49 |
| 2nd | 19.56 | 1.16 | 0.66 |
| 3rd | 0.50 | 1.08 | 0.16 |
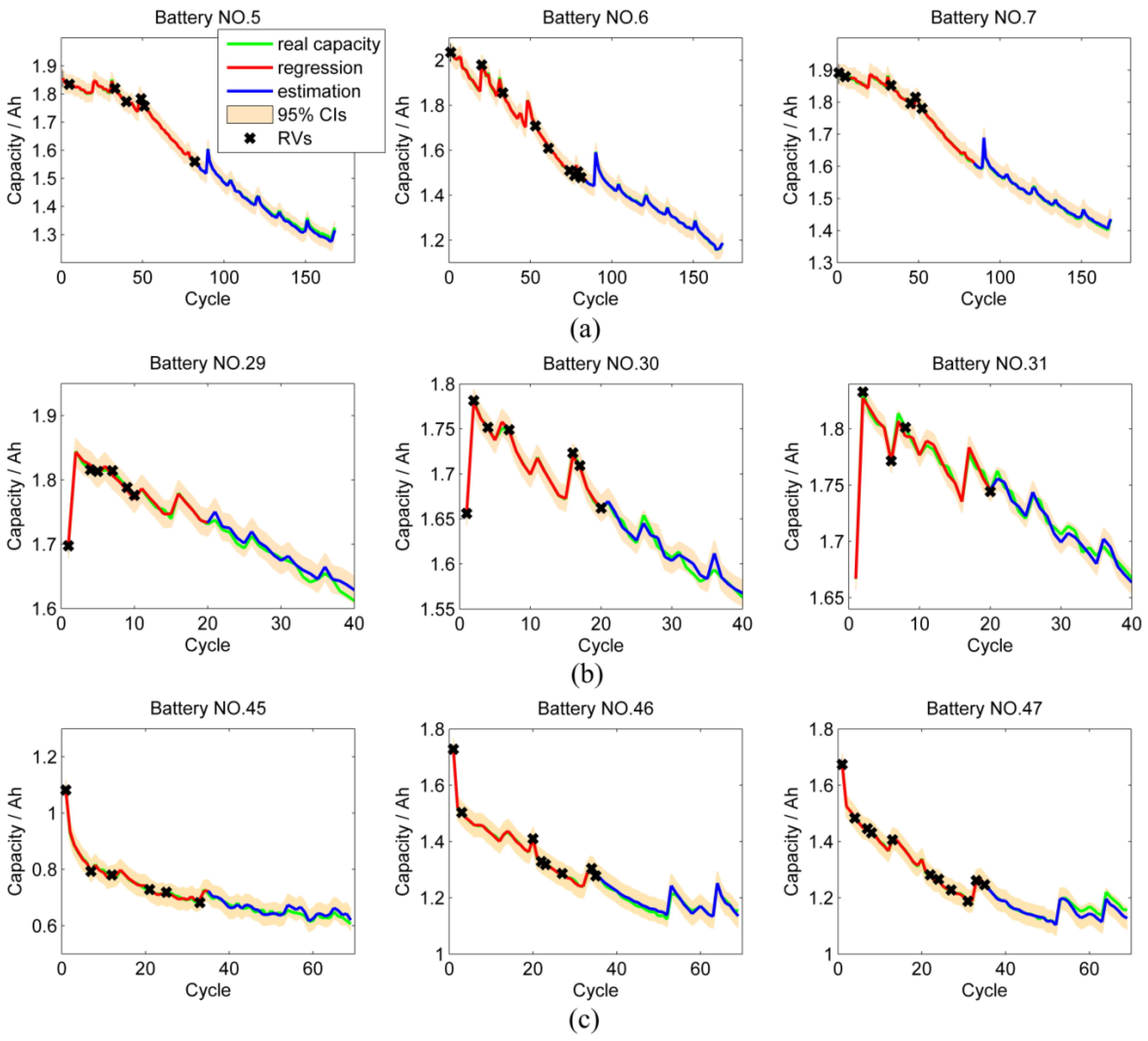
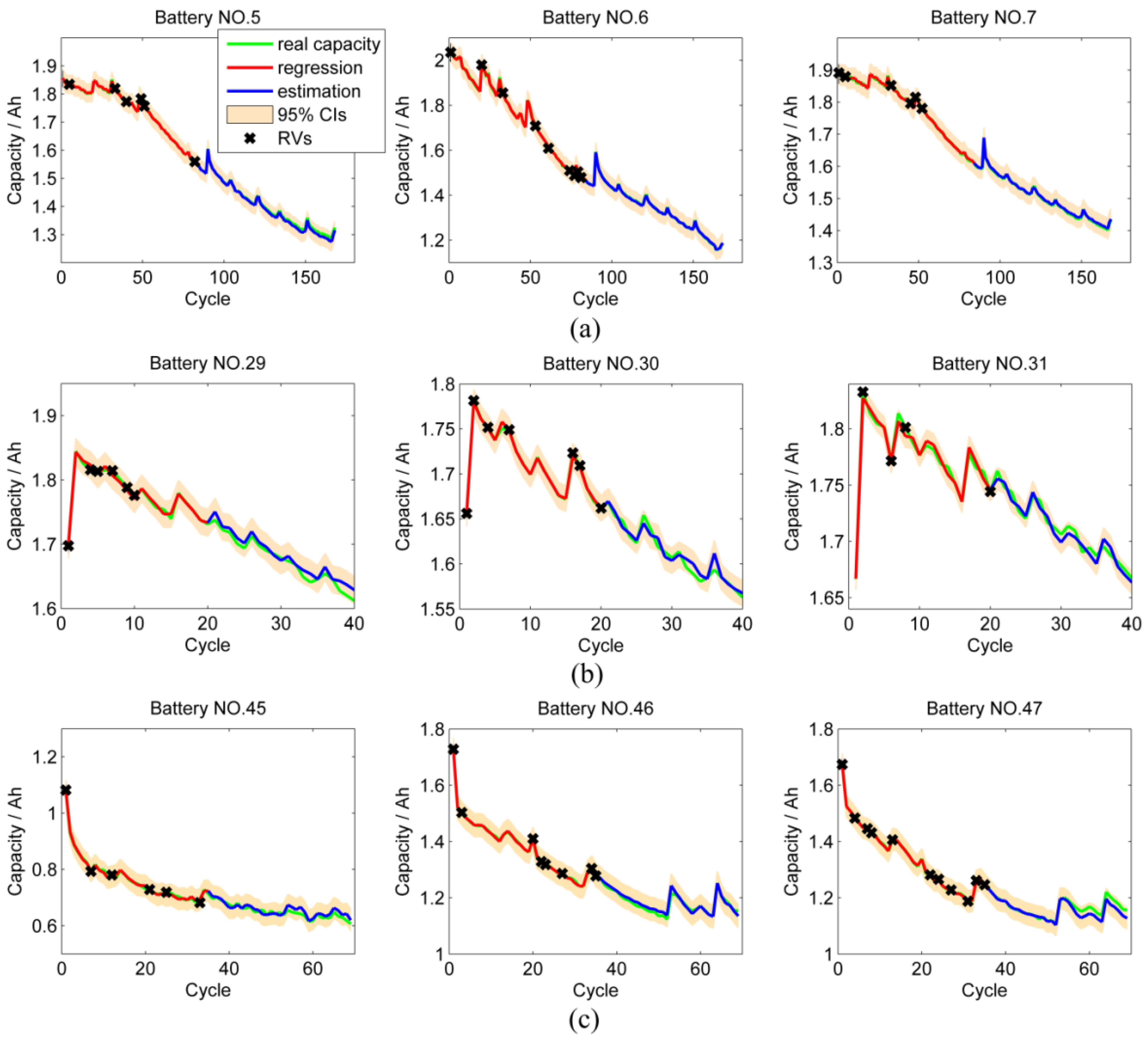
The regression and estimation results during offline training and verification of nine batteries are shown in
Figure 6. Asterisks in
Figure 6 represent relevance vectors (RVs), which form the sparse solution. The small number of RVs indicates the sparse property of MKRVM.
Figure 6 also shows that most real capacity values lie within the 95% CIs. The degradation rates of battery capacity in distinct batches vary because of different ambient temperatures and discharge currents.
Table 5 summarizes the regression and estimation errors. Overall, in the three batches, the proposed model performs well in the regression and estimation process. Interestingly, in the first batch, some estimation errors are even less than regression errors, indicating the good generalizability of MKRVM. In the second batch, data size is relatively small, but values of RMSE and MRE are less than 0.01 and 1%, respectively; and even the smallest
R2 is more than 0.9. The results of the second batch demonstrate that the proposed approach can deal with a sparse dataset. In the third batch, regression errors are small, but the values of
R2 of the estimated capacity of batteries 45 and 47 are slightly far from 1. In
Figure 6c, the back half data of batteries in the third batch are highly nonlinear and fluctuate. Cameron
et al. [
37] proved that negative or small
R2 values may occur when fitting nonlinear functions to the data because of the computational definition of
R2. Thus, small
R2 values in the third batch are rational. The values of RMSE and MRE in the estimation results in the third batch are also acceptable. In addition, as the 95% CIs can cover most of the real battery capacity, the performance of the proposed approach on the datasets of batteries in the third batch is considered satisfactory.
Figure 6.
Regression and estimation results during the offline training and verification for the three batches of nine batteries. (a) Batteries 5–7; (b) batteries 29–31; (c) batteries 45–47.
Figure 6.
Regression and estimation results during the offline training and verification for the three batches of nine batteries. (a) Batteries 5–7; (b) batteries 29–31; (c) batteries 45–47.
The offline verification process confirms the generalizability of the well-trained MKRVM. The experiment results demonstrate that the proposed AMKRVM can produce accurate and robust capacity estimation under various conditions.
Table 5.
Regression and estimation errors during the offline training and verification process.
Table 5.
Regression and estimation errors during the offline training and verification process.
| Batch | Battery | Regression Errors | Estimation Errors |
|---|
| εRMS | ε MR (%) | R2 | εRMS | εMR (%) | R2 |
|---|
| 1st | No. 5 | 0.0015 | 0.0592 | 0.9997 | 0.0072 | 0.4479 | 0.9817 |
| No. 6 | 0.0034 | 0.1362 | 0.9996 | 0.0033 | 0.2192 | 0.9972 |
| No. 7 | 0.0238 | 0.5609 | 0.9267 | 0.0055 | 0.2688 | 0.9869 |
| 2nd | No. 29 | 0.0046 | 0.2197 | 0.9835 | 0.0090 | 0.4608 | 0.9335 |
| No. 30 | 0.0020 | 0.0693 | 0.9966 | 0.0070 | 0.3466 | 0.9442 |
| No. 31 | 0.0043 | 0.1996 | 0.9842 | 0.0058 | 0.3309 | 0.9481 |
| 3rd | No. 45 | 0.0058 | 0.6436 | 0.9945 | 0.0116 | 1.4982 | 0.7446 |
| No. 46 | 0.0030 | 0.1784 | 0.9990 | 0.0096 | 0.6287 | 0.9316 |
| No. 47 | 0.0024 | 0.1465 | 0.9995 | 0.0149 | 0.9254 | 0.7613 |
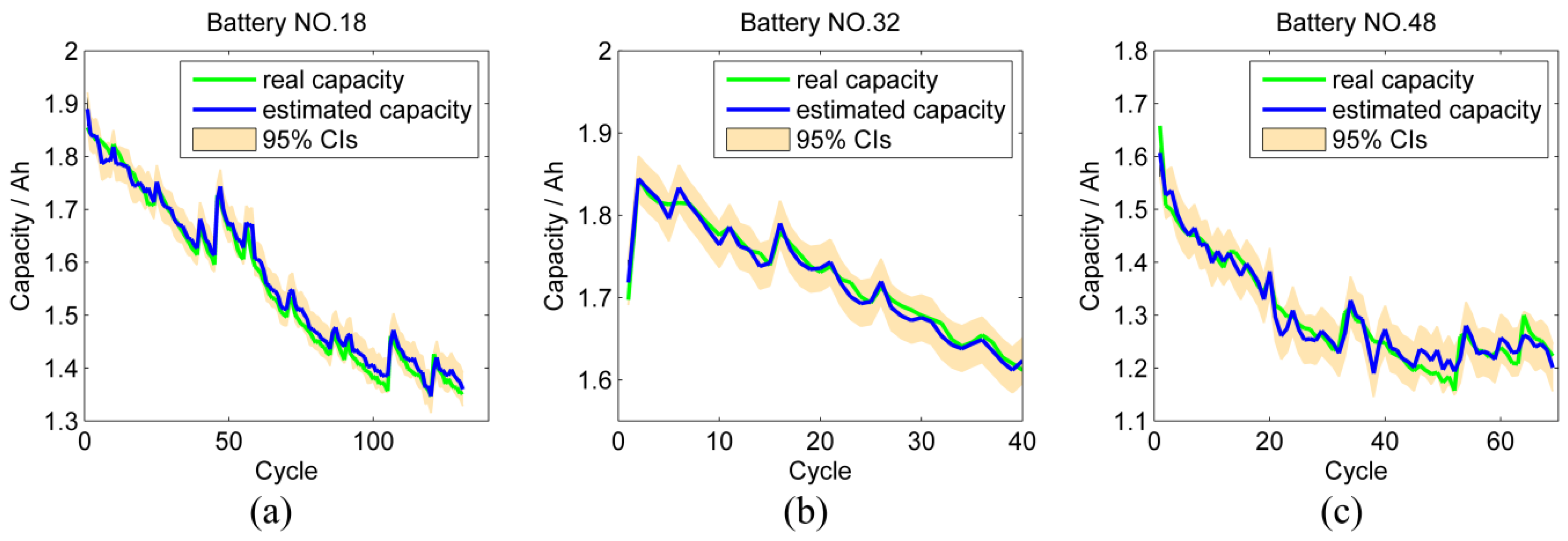
5.3.3. Online Estimation
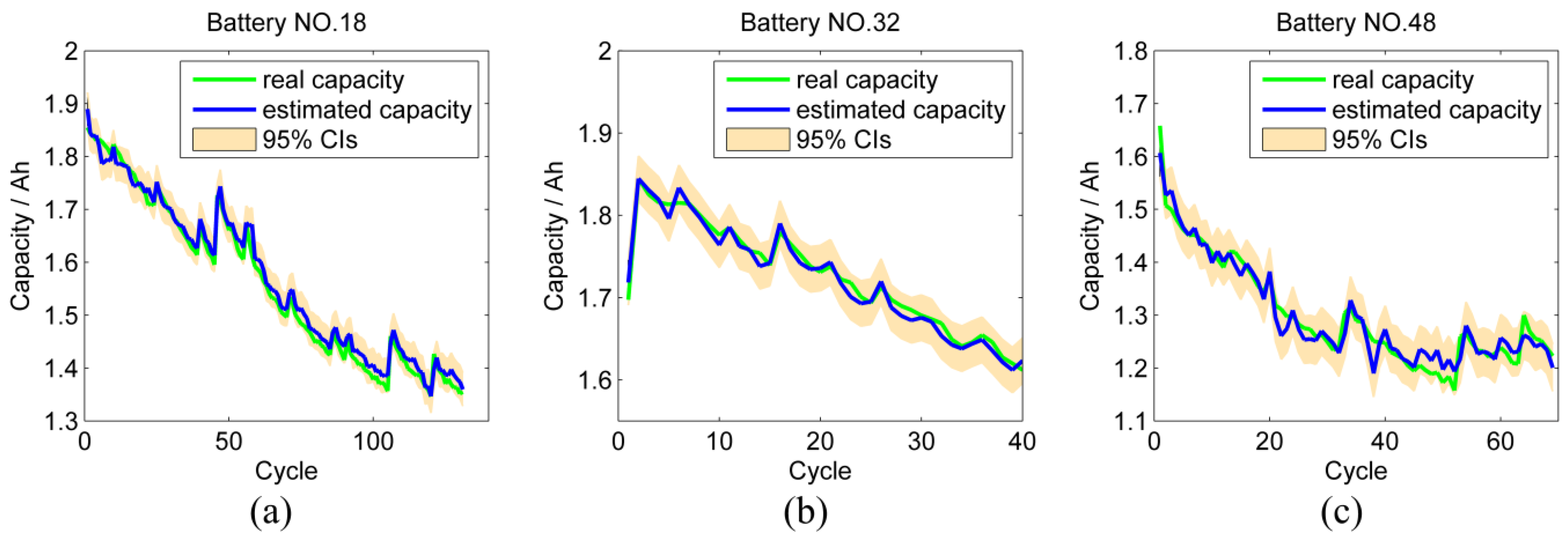
The well-trained MKRVM is utilized to estimate the capacity of the fourth battery in each batch (Nos.18, 32 and 48). After offline verification, the well-trained MKRVM do not need to be trained again using the data of the online batteries. The estimation results obtained using parameters listed in
Table 4 are summarized in
Figure 7, and
Table 6 shows the estimation errors. The 95% CIs can cover most of the real capacity values. Although the degradation data of online batteries is not utilized to estimate parameters in MKRVM, the method still performs well. The online estimation results verify the accuracy and effectiveness of the proposed approach.
Figure 7.
Online capacity estimation results: (a) Battery 18; (b) Battery 32; (c) Battery 48.
Figure 7.
Online capacity estimation results: (a) Battery 18; (b) Battery 32; (c) Battery 48.
Table 6.
Estimation errors of the online estimated capacity.
Table 6.
Estimation errors of the online estimated capacity.
| Battery | Estimation Errors |
|---|
| εRMS | εMR (%) | R2 |
|---|
| No. 18 | 0.0155 | 0.8032 | 0.9898 |
| No. 32 | 0.0077 | 0.3281 | 0.9870 |
| No. 48 | 0.0119 | 0.5516 | 0.9508 |
5.4. Method Validation and Comparison
To verify the accuracy of the proposed approach, we conducted the first comparison study to determine the estimation errors of two other adaptive RVMs with a single kernel. The first model for comparison is an RVM with RBF kernel (M1), and the second RVM only uses the polynomial kernel (M2).
To utilize the dataset, a cross-validation (C-V) process is employed to assess the estimation performance of each model. In C-V, the original data are divided into two parts: one for training and the other part for testing. In each batch, M batteries are randomly selected as the training data and the remaining (4-M) batteries are used for testing. In each batch, the C-V process is repeated
k =
times, with each of the four batteries used exactly
times as the validation data. Total C-V RMSE is computed as
where
and
are the test and the training datasets in
th C-V process, respectively;
denotes the AMKRVM model built with the test subset
;
tn is the actual response of the input
; and
is the total number of test data points for the
C-V processes.
The comparison results are summarized in
Table 7. The values of C-V RMSE of the AMKRVM are smaller than that of the two single-kernel models, which shows that the multi-kernel function enables the RVM to be more accurate and general than the single kernel. In online applications, the degradation data of the on-line battery are not used to train RVM, and generalizability plays a significant role in estimation. The results illustrate that the proposed AMKRVM approach has better performance in online applications than the other single-kernel RVMs under different conditions.
Table 7.
Comparison results of C-V RMSEs of three models.
Table 7.
Comparison results of C-V RMSEs of three models.
| Batch | M | C-V RMSE |
|---|
| EMKRVM | M1 | M2 |
|---|
| 1st | 3 | 0.0342 | 0.0573 | 0.0794 |
| 2 | 0.0496 | 0.0767 | 0.0927 |
| 1 | 0.0557 | 0.0975 | 0.1096 |
| 2nd | 3 | 0.0107 | 0.0323 | 0.0779 |
| 2 | 0.0155 | 0.0423 | 0.0878 |
| 1 | 0.0148 | 0.0290 | 0.1001 |
| 3rd | 3 | 0.0303 | 0.3047 | 0.3008 |
| 2 | 0.0307 | 0.3491 | 0.3180 |
| 1 | 0.0536 | 0.3522 | 0.4414 |
Additionally, C-V RMSEs of the proposed model under different training data size illustrate that more accurate estimated capacity can be obtained with more training data used. An opposite result occurs in the second batch when M decreases from 2 to 1. However, in
Table 7, the increase in C-V RMSEs in the second batch during C-V processes is nearly negligible. The MKRVM performance on the second batch is stable. Similar conclusions can be drawn from
Table 5. Thus, the aforementioned opposite result may be due to normal experimental errors. Overall, the C-V results validate the accuracy of the proposed model.
The second experiment compares the running time of the proposed AMKRVM with that of MKRVM that uses traditional PSO to search for optimal parameters. The results show that the iterative numbers of APSO (around 200 iterations) are less than that of the latter approach (around 340 iterations), thereby confirming the efficiency of the proposed method.
6. Conclusions
This paper proposes an ensemble and data-driven approach for online capacity estimation of lithium-ion batteries. First, six features are extracted from cyclic charge/discharge cycles and used as health indicators for a battery. An adaptive method based on MKRVM and APSO algorithm is then employed to regress and estimate the capacity. To ensure the robustness of the model for on-line application, we utilized offline data for training MKRVM and verifying method generalizability. Finally, cross-validation is performed in model comparison to validate the accuracy of the proposed model.
Experimental results demonstrate that the proposed approach has satisfactory performance under different conditions. AMKRVM can be used to automatically and effectively determine optimal parameter settings under distinct circumstances. The novel offline supervised learning step ensures the efficiency and robustness of the estimation. In model comparison, the cross-validation results show the validity of our model. Compared with single-kernel RVMs, the novel AMKRVM produces more accurate and robust estimation results. Besides, the C-V results indicate that estimation accuracy increases as more training data are used because of the relatively good coherence of the sample data. Finally, it shows that parameter optimization through APSO is also more efficient. The results verify that the proposed method is promising for online battery prognostics.
However, the AMKRVM training is limited in the same patch data because ambient temperature is not included as a variable in the model. The optimal parameters of MKRVM differ under varied ambient temperatures. As the influence of the ambient temperature on capacity degradation is highly demonstrated, further research must be performed to explore the effects of this parameter.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}