Saturated Adaptive Output-Feedback Power-Level Control for Modular High Temperature Gas-Cooled Reactors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Dynamic Model and Problem Formulation
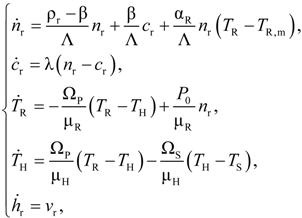
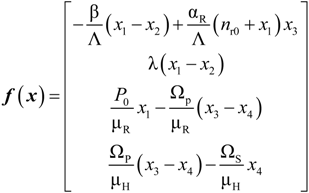
2.1. Nonlinear State-Space Model for Control Design



2.2. Theoretic Problem Formulation

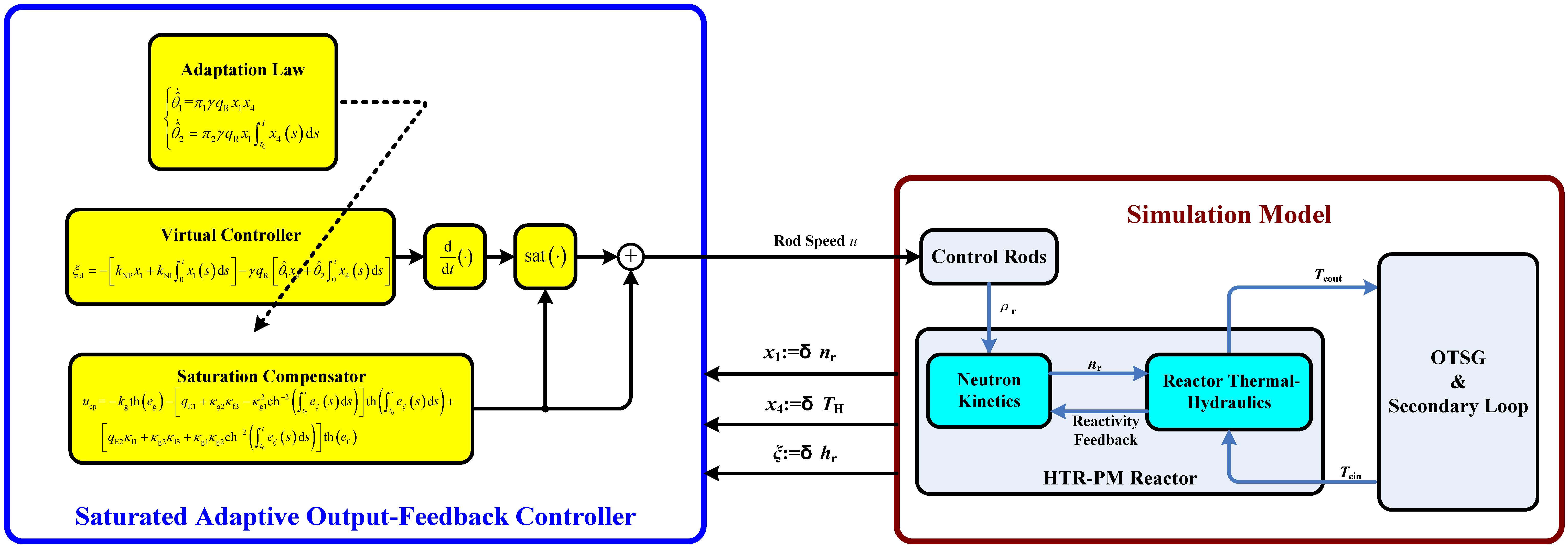
3. Saturated Adaptive Output-Feedback Power-Level Control Design


























4. Simulation Results with Discussion
4.1. Description of the Numerical Simulation
4.2. Simulation Results
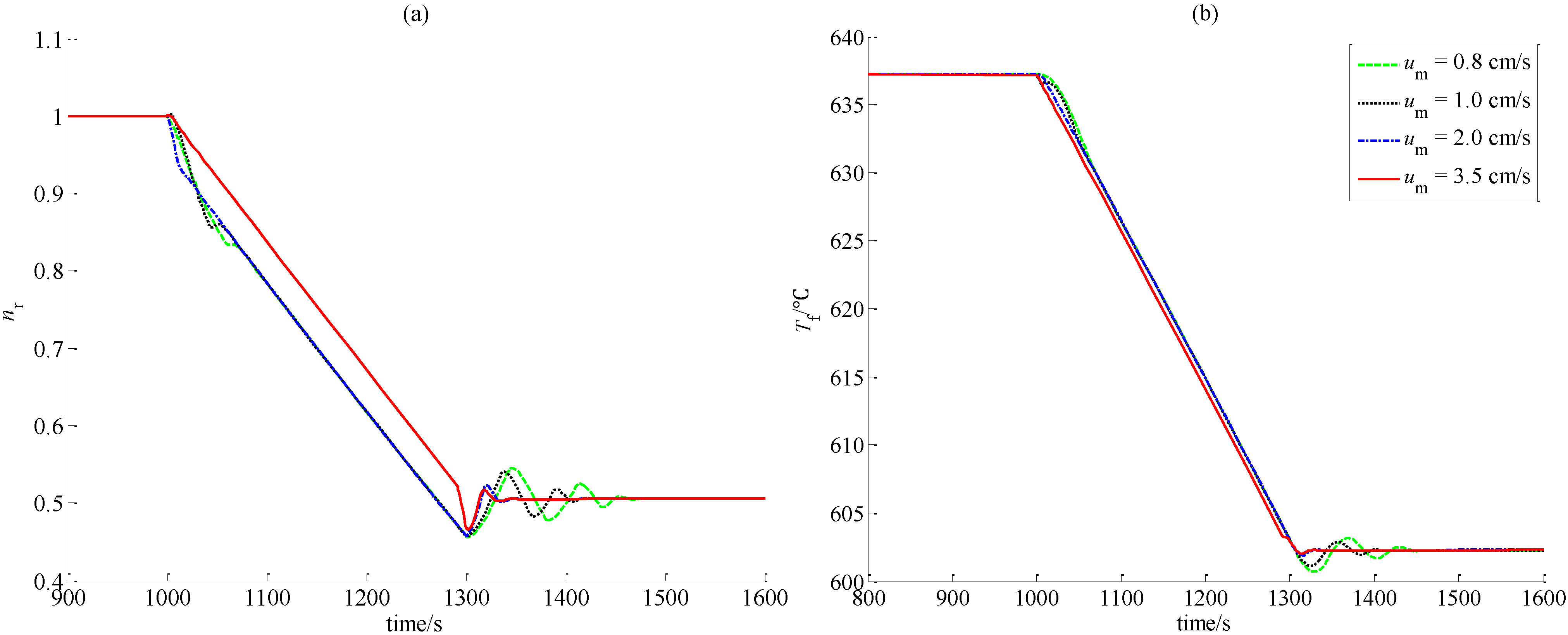
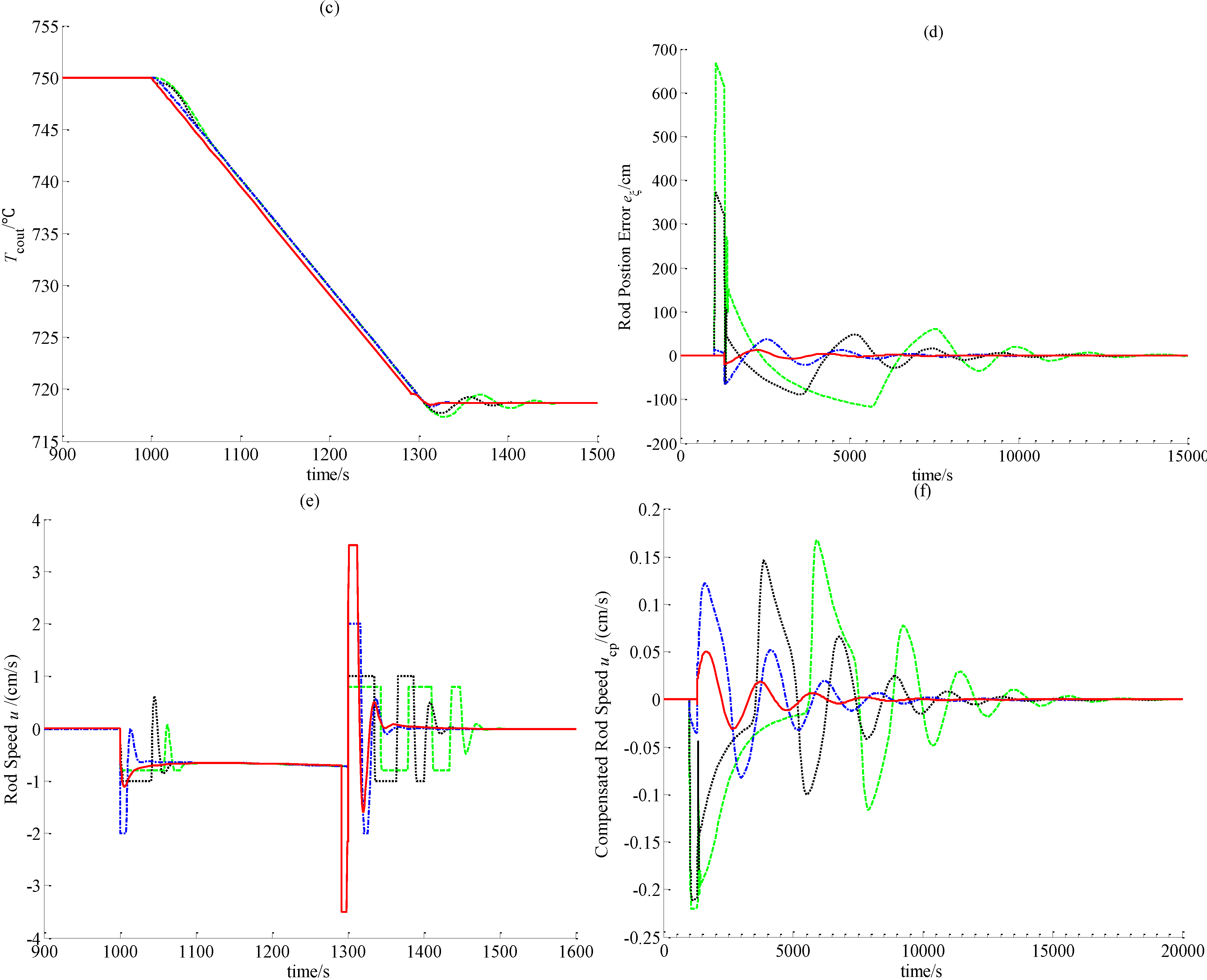
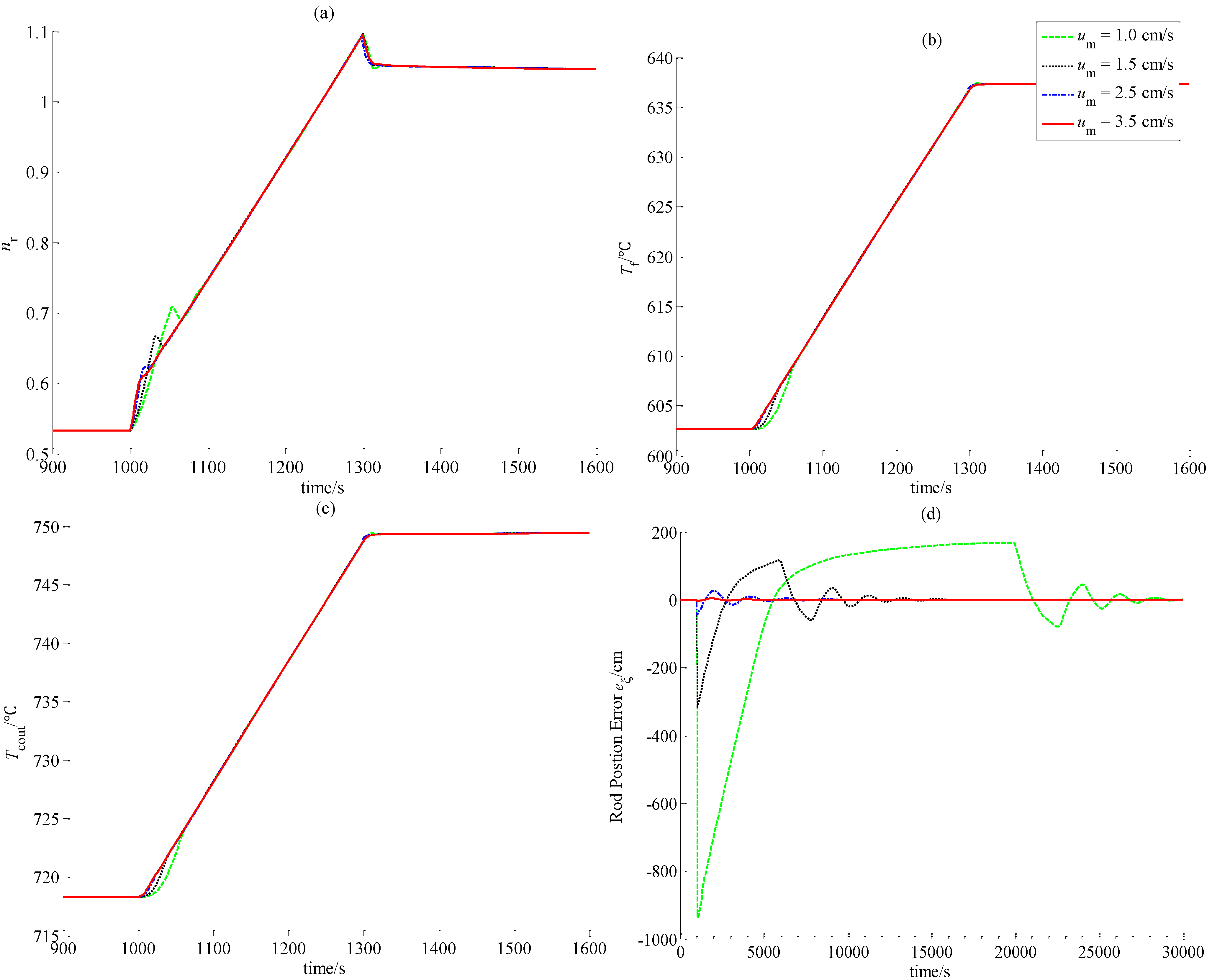
4.2.1. Case A: Large-Scale Power-Demand Increase

4.2.2. Case B: Large-Scale Power-Demand Decrease

4.3. Discussion
5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Ingersoll, D.T. Deliberately small reactors and the second nuclear era. Prog. Nuclear Energy 2009, 51, 589–603. [Google Scholar] [CrossRef]
- Vujić, J.; Bergmann, R.M.; Škoda, R.; Miletić, M. Small modular reactors: simpler, safer, cheaper? Energy 2012, 45, 288–295. [Google Scholar] [CrossRef]
- Lohnert, G.H. Technical design features and essential safety-related properties of the HTR-Module. Nuclear Eng. Des. 1990, 121, 259–275. [Google Scholar] [CrossRef]
- Wu, Z.; Lin, D.; Zhong, D. The design features of the HTR-10. Nuclear Eng. Des. 2002, 218, 25–32. [Google Scholar] [CrossRef]
- Zhang, Z.; Sun, Y. Economic potential of modular reactor nuclear power plants based on the Chinese HTR-PM project. Nuclear Eng. Des. 2007, 237, 2265–2274. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, Z.; Wang, D.; Xu, Y.; Sun, Y.; Li, F.; Dong, Y. Current status and technical description of Chinese 2 × 250 MWth HTR-PM demonstration plant. Nuclear Eng. Des. 2009, 239, 265–2274. [Google Scholar]
- Li, W.; Zhang, Y.; Zheng, W. Investigation on three seawater desalination process coupled with NHR-200. Desalination 2012, 298, 93–98. [Google Scholar] [CrossRef]
- Zhang, P.; Chen, S.Z.; Wang, L.J.; Xu, J.M. Overview of nuclear hydrogen production research through iodine sulfur process at INET. Int. J. Hydrog. Energy 2010, 35, 2883–2887. [Google Scholar] [CrossRef]
- Shtessel, Y.B. Sliding mode control of the space nuclear reactor system. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 579–589. [Google Scholar] [CrossRef]
- Etchepareborda, A.; Lolich, J. Research reactor power controller design using an output feedback nonlinear receding horizon control method. Nuclear Eng. Des. 2007, 237, 268–276. [Google Scholar] [CrossRef]
- Eliasi, H.; Menhaj, M.B.; Davilu, H. Robust nonlinear model predictive control for nuclear power plants in load following operations with bounded xenon oscillations. Nuclear Eng. Des. 2011, 241, 533–543. [Google Scholar] [CrossRef]
- Eliasi, H.; Menhaj, M.B.; Davilu, H. Robust nonlinear model predictive control for a PWR nuclear power plant. Prog. Nuclear Energy 2012, 54, 177–185. [Google Scholar] [CrossRef]
- Dong, Z. Dynamic output feedback power-level control for the MHTGR based on iterative damping assignment. Energies 2012, 5, 1782–1815. [Google Scholar] [CrossRef]
- Kokotović, P. The joy of feedback. IEEE Control Syst. 1992, 12, 7–17. [Google Scholar] [CrossRef]
- Dong, Z. Physically-based power-level control for modular high temperature gas-cooled reactors. IEEE Trans. Nuclear Sci. 2012, 59, 2531–2549. [Google Scholar] [CrossRef]
- Park, M.G.; Cho, N.Z. Time-optimal control of nuclear reactor power with adaptive proportional-integral-feedforward gains. IEEE Trans. Nuclear Sci. 1993, 40, 266–270. [Google Scholar] [CrossRef]
- Arab-Alibeik, H.; Setayeshi, S. Adaptive control of a PWR core power using neural networks. Ann. Nuclear Energy 2005, 32, 588–605. [Google Scholar] [CrossRef]
- Dong, Z. Artificial neural network compensated output feedback power-level control for modular high temperature gas-cooled reactors. Energies 2014, 7, 1149–1170. [Google Scholar] [CrossRef]
- Sontag, E.D. Input to state stability: basic concepts and results. In Nonlinear and Optimal Control Theory; Cachan, J.M., Groningen, F.T., Paris, B.T., Eds.; Springer: Berlin, Germany, 2008; pp. 163–220. [Google Scholar]
- Dong, Z.; Huang, X.; Zhang, L. A nodal dynamic model for control system design and simulation of an MHTGR core. Nuclear Eng. Des. 2010, 240, 1251–1261. [Google Scholar] [CrossRef]
- Li, H.; Huang, X.; Zhang, L. A lumped parameter dynamic model of the helical coiled once-through steam generator with movable boundaries. Nuclear Eng. Des. 2008, 238, 1657–1663. [Google Scholar] [CrossRef]
- Dong, Z.; Huang, X. Real-Time Simulation Platform for the Design and Verification of the Operation Strategy of the HTR-PM. In Proceedings of the 21th International Conference on Nuclear Engineering, Chengdu, China, 29 July–2 August 2013. ICONE21–16023.
- Mazzini, G.; Bomboni, E.; Cerullo, N.; Fridman, E.; Lomonaco, G.; Shwageraus, E. The use of Th in HTR: state of the art and implementation in Th/Pu fuel cycles. Sci. Technol. Nuclear Install. 2009. [Google Scholar] [CrossRef]
- Cerullo, N.; Bufalino, D.; Forasassi, G.; Lomonaco, G.; Rocchi, P.; Romanello, V. An additional performance of HTRs: The waste radiotoxicity minimisation. Radiat. Prot. Dosim. 2005, 115, 122–125. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Z. Saturated Adaptive Output-Feedback Power-Level Control for Modular High Temperature Gas-Cooled Reactors. Energies 2014, 7, 7620-7639. https://doi.org/10.3390/en7117620
Dong Z. Saturated Adaptive Output-Feedback Power-Level Control for Modular High Temperature Gas-Cooled Reactors. Energies. 2014; 7(11):7620-7639. https://doi.org/10.3390/en7117620
Chicago/Turabian StyleDong, Zhe. 2014. "Saturated Adaptive Output-Feedback Power-Level Control for Modular High Temperature Gas-Cooled Reactors" Energies 7, no. 11: 7620-7639. https://doi.org/10.3390/en7117620
APA StyleDong, Z. (2014). Saturated Adaptive Output-Feedback Power-Level Control for Modular High Temperature Gas-Cooled Reactors. Energies, 7(11), 7620-7639. https://doi.org/10.3390/en7117620