As briefly mentioned in the introduction, the local controllers of the DGs are based in fuzzy logic due to its flexibility, adaptiveness and to the non-linearity of the system. The fuzzy controllers are non linear in nature and, therefore, a robust performance under disturbances is expected. Analytically, the four main flow subsystems of the FCS briefly mentioned in the previous section, and the auxiliary subsystems that are beyond the scope of this paper, establish a non linear FCS. In addition, the presence of non linear and cross-coupling terms of the DFIG dynamics form a microgrid, which is intensively non linear. Some key points of great significance for the system efficiency and performance, outlined below, enhance the application of a fuzzy based intelligent control. As for the hybrid system, it is significant for the compressor motor controller (“Chopper 2”) to have a good dynamic response during fast load changes so that the FCS voltage does not drop dramatically leading to oxygen starvation. Secondly, the “Chopper 1” controller has to act simultaneously with the fuel flow control achieving stability and accuracy while minimizing overshooting and current rippling. The DFIG and hybrid system VSI controllers have to meet the same requirements. The design of the fuzzy controllers does not require a precise mathematical modeling or sophisticated computations that in many cases lack efficiency and do not perform well. The latter indicates that fuzzy logic is more suitable and practical in real systems as the engineer can tune the local controller easier via the linguistic variables (easy engineering).
3.1. Hybrid System Controller
The local controller of the hybrid system consists of five different fuzzy local controllers. The fuzzy controllers (Fc) are designed from a heuristic knowledge of the system. Of course, they are thoroughly iterated by system simulation studies in order to be fine tuned. The advantage of this method is the fast convergence, as it provides adaptively decreasing step size in the search for the adequate output. The analytical description of the controllers was done in [
10]. The designed controller did not change in order that the hybrid system becomes integrated into the microgrid but some membership functions (MF) of the controllers were tuned for better response enhancement. The following is a brief description of the controllers.
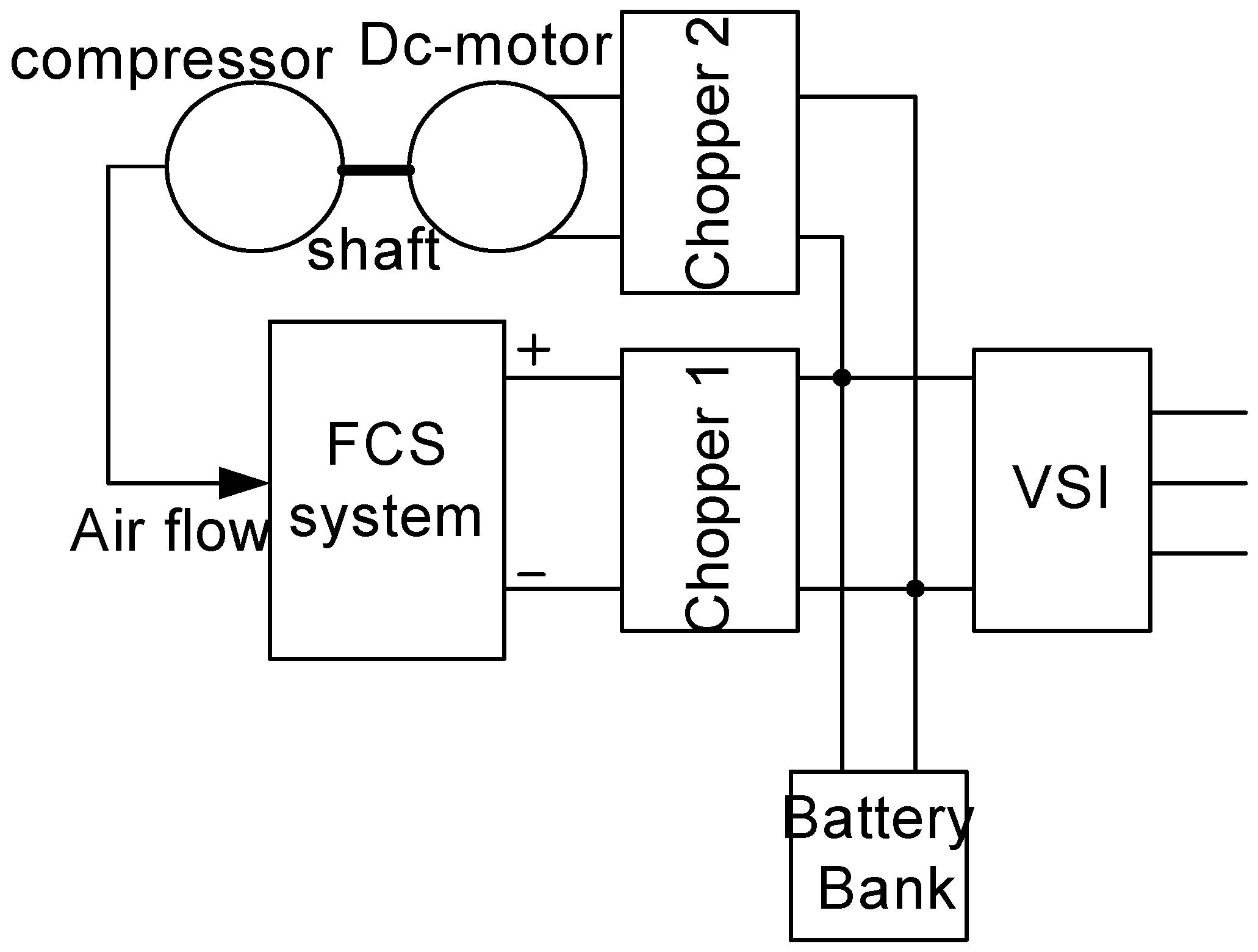
“Chopper 1” control: As already mentioned, the battery bank—when coupled to the DC side—supports the FCS when fast transient phenomena occur, as the FCS has slow dynamics and certain technical limitations. In the steady state, the FCS of the study must provide all of the demanded power and the battery bank supplying current has to be zero. The Chopper 1 control includes the Fc 1 and Fc 2. The Fc 2, through the duty cycle of “Chopper 1”, ensures that the FCS provides the demanded power by the AC-side and the demanded power by the DC-motor. The Fc1 ensures that the battery current is forced to zero in steady state. For the case study in which the battery is missing, the Fc1 controller loop is eliminated from “Chopper 1” controller.
“Chopper 2” control: The Fc3 constitutes the Chopper 2 control and determines, through its duty ratio, the power that the DC-motor absorbs and thereby regulates the air flow supplied by the compressor to the FCS. According to the pressure variation of the supplied air, the supplied hydrogen from the hydrogen tank is regulated through a valve, and this regulates the output power of the FCS according to the power demanded by the system without oxygen starvation. In our study, the hydrogen flow is regulated to the oxygen flow through a simple PI controller. The indication of oxygen starvation is the excess oxygen ratio λO2, which is the ratio of oxygen supplied to oxygen used in the cathode. The optimum value of λO2 is taken as equal to 2 where, for our chosen FCS, the net deliverable power is about maximum.
VSI control: The VSI control consists of the Fc4 and Fc5. Through the IGBT’s switching of the VSI, controllers 4 and 5 ensure that the hybrid system provides a part of the demanded active and reactive power by the AC side when a local disturbance occurs or after the distribution grid is disconnected. After simulation tests in our system, the dependency of the voltage magnitude from the active power was found stronger than that of the reactive power. This happens as the distribution grid of our study is weak and has a low short circuit ratio and the distribution lines have a low X/R ratio 0.5. The control of the active power is achieved through the modulation index (mi) of the PWM method. The value of mi is determined by the Fc4. The control of the reactive power is achieved through shifting the phase angle on the sinusoidal reference signal of the PWM method. The Fc5 determines the shift value.
3.2. DFIG System Controller
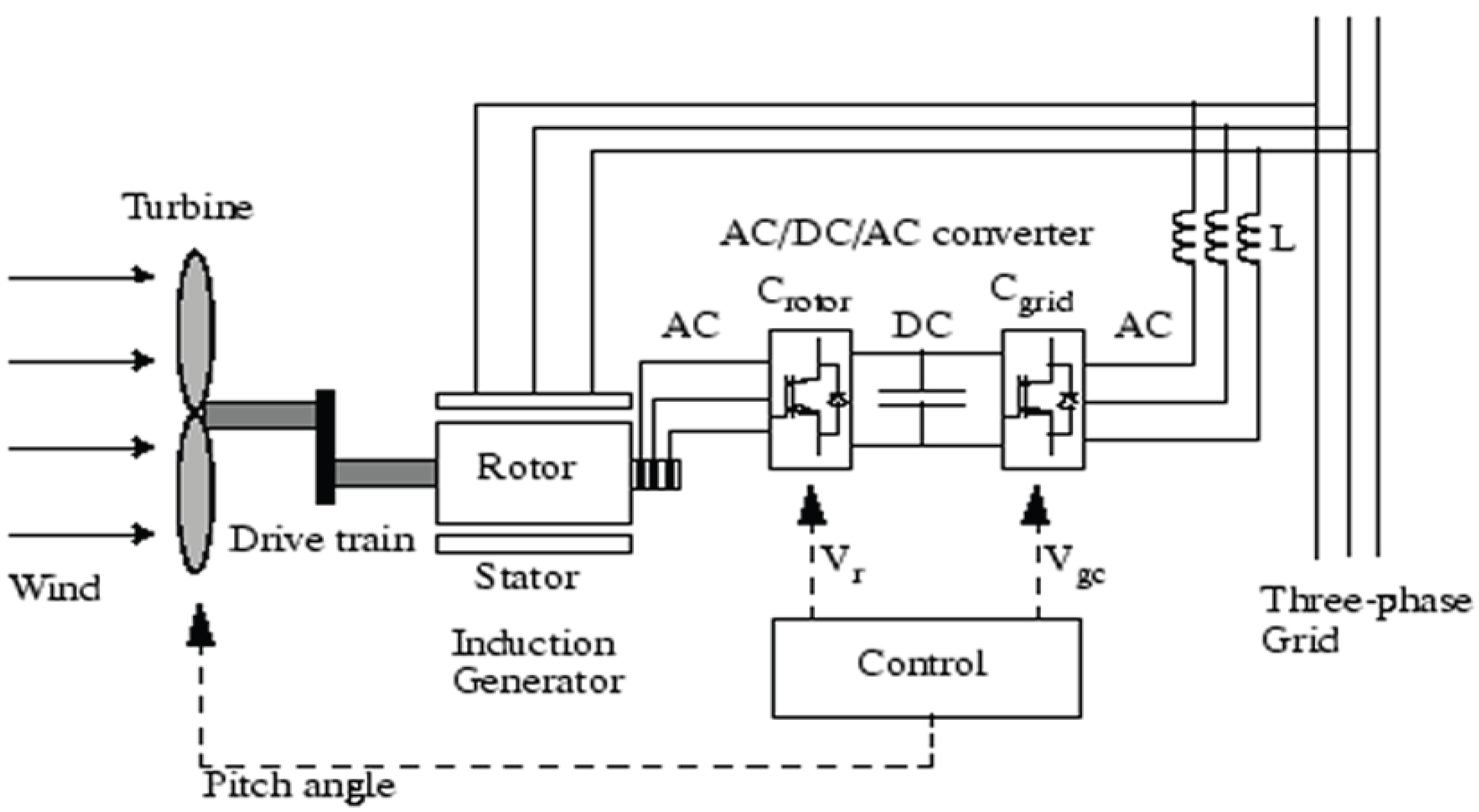
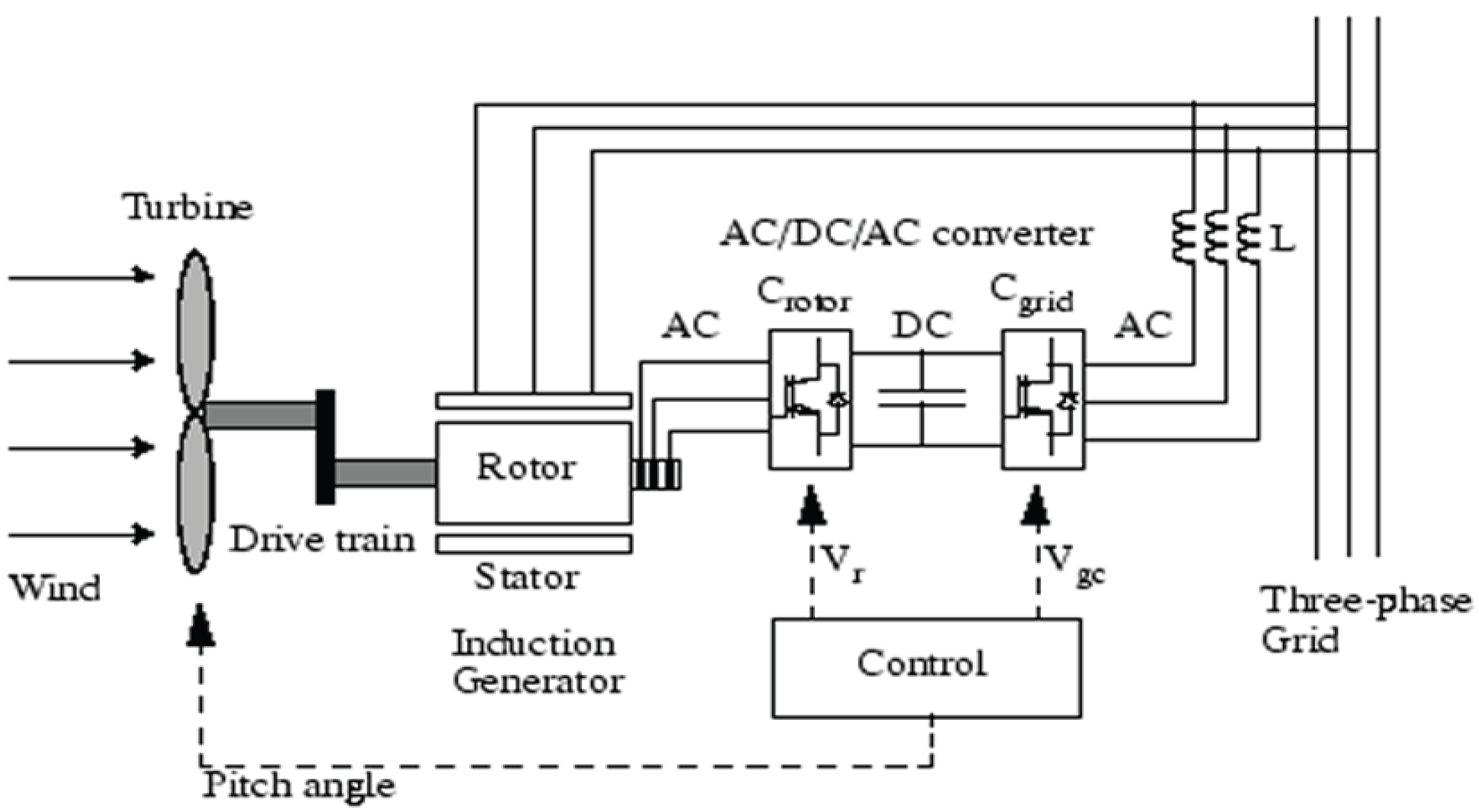
The DFIG controller comprises the control applied to the grid-side converter (Cgrid), the control applied to the rotor-side converter (Crotor) and the pitch control (
Figure 4). In this study, the pitch control is not applicable as the wind speed is assumed to be lower than the predefined limit (18 m/s). So, the angle of the pitches remains the same during the simulation study.
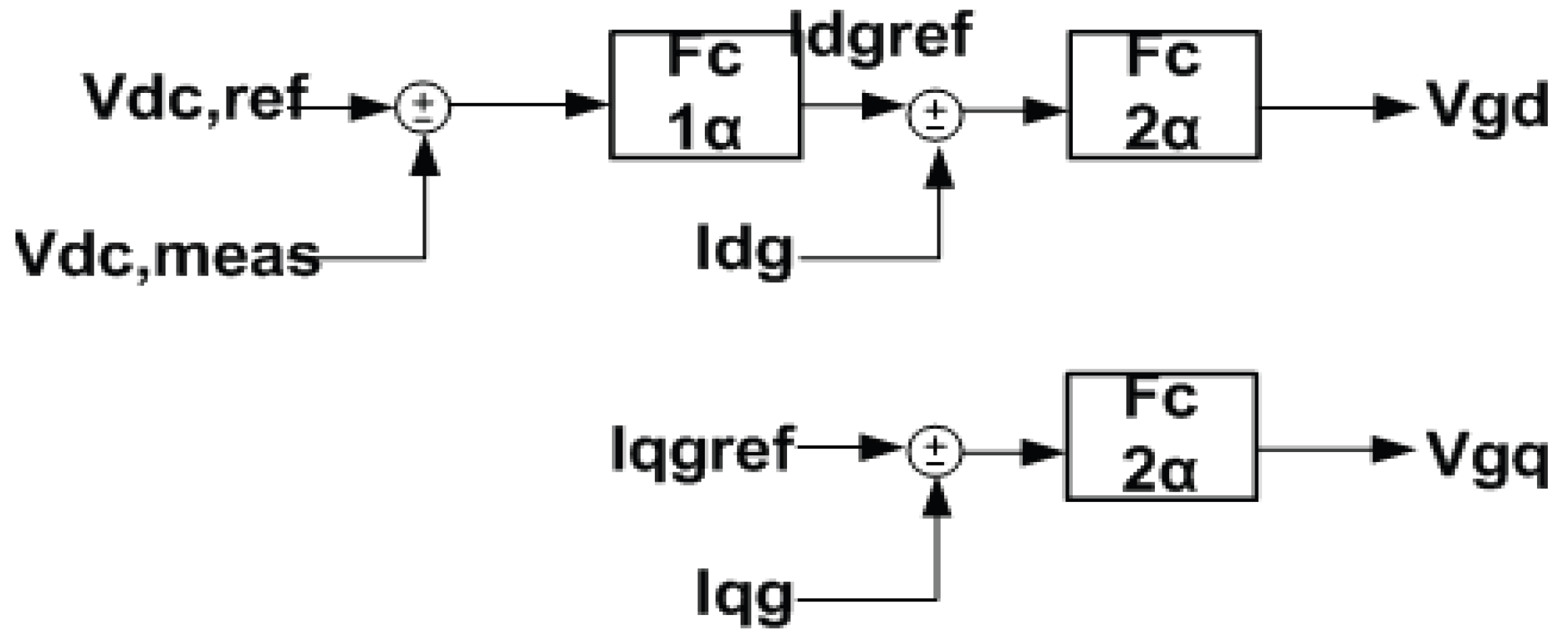
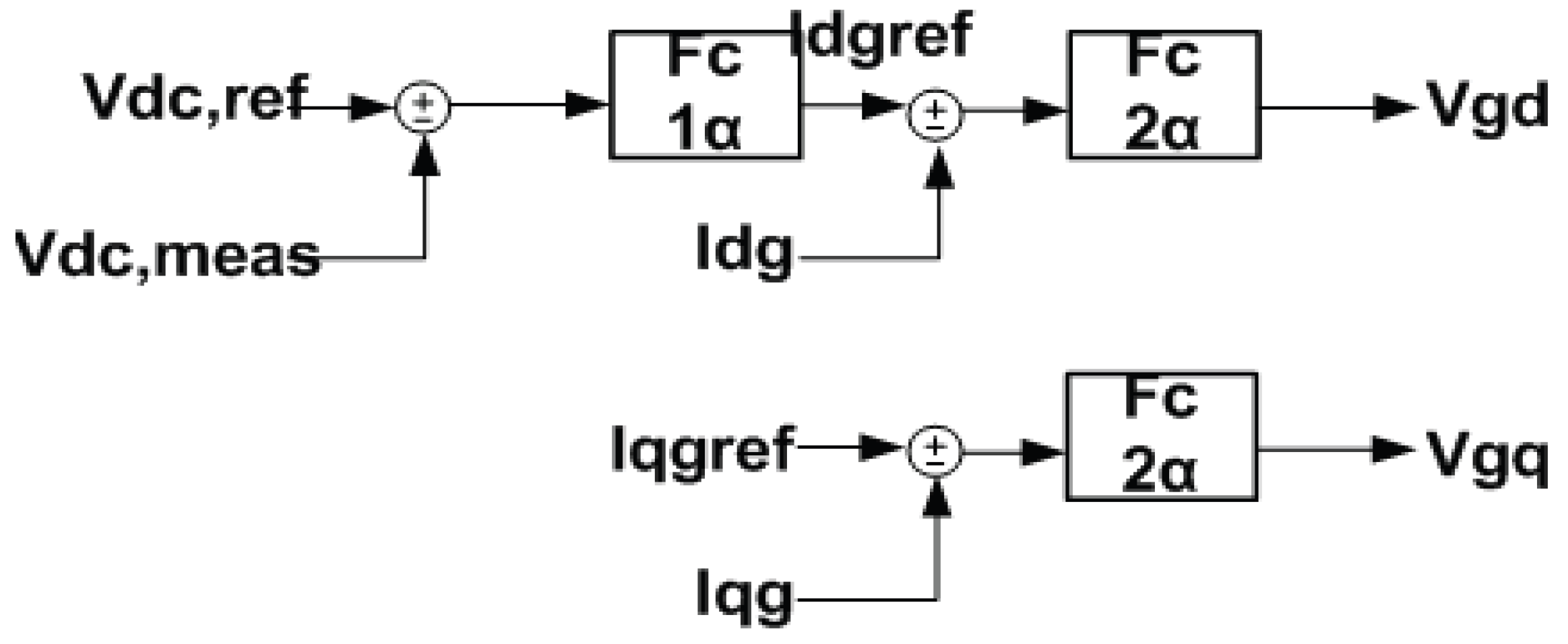
Cgrid control: This control regulates the independent exchange of active and reactive power between the converter and the local grid. This controller focuses on regulating the DC- ink voltage. The applied vector control is based on a synchronously rotating, grid-flux oriented d-q reference frame, meaning that the d-axis is aligned with the grid voltage and the q component is zero. The d component of the converter current regulates the DC-link voltage and the q component of the converter current regulates the reactive power. The control configuration is shown in
Figure 5. The Vdc,ref signal is the reference value for the DC-link voltage and the Vdc,meas signal is the measured DC-link voltage. Τhe deviation of the measured voltage from the reference value drives the Fc1α. The reference value of the d component of the output current (from the grid side) is the Fc1a output. The deviation of the measured current from the reference value drives the Fc2α, whose output is the control signal Vgd. The reference value of the q component of the output current, Ιqgref, is zero. The deviation of the measured signal from the reference value drives the Fc2α and its output is the control signal Vgq. It is preferrable for the reactive power to be regulated through the Crotor in order that the electronics rating remains low. Moreover, limiters are placed in order that the currents don’t exceed the electronics limitations. The controller already described remains the same for both case studies.
Figure 5.
Cgrid control of the DFIG for both study cases.
Figure 5.
Cgrid control of the DFIG for both study cases.
Crotor control: This control independently regulates the active and reactive power of the stator. The applied vector control is based on a synchronously rotating, stator-flux oriented d-q reference frame. Meaning that the d-axis is aligned with the vector of the stator magnetic flux and the q axis is zero. The active power is regulated via the q component of the rotor current and the reactive power via the d component.
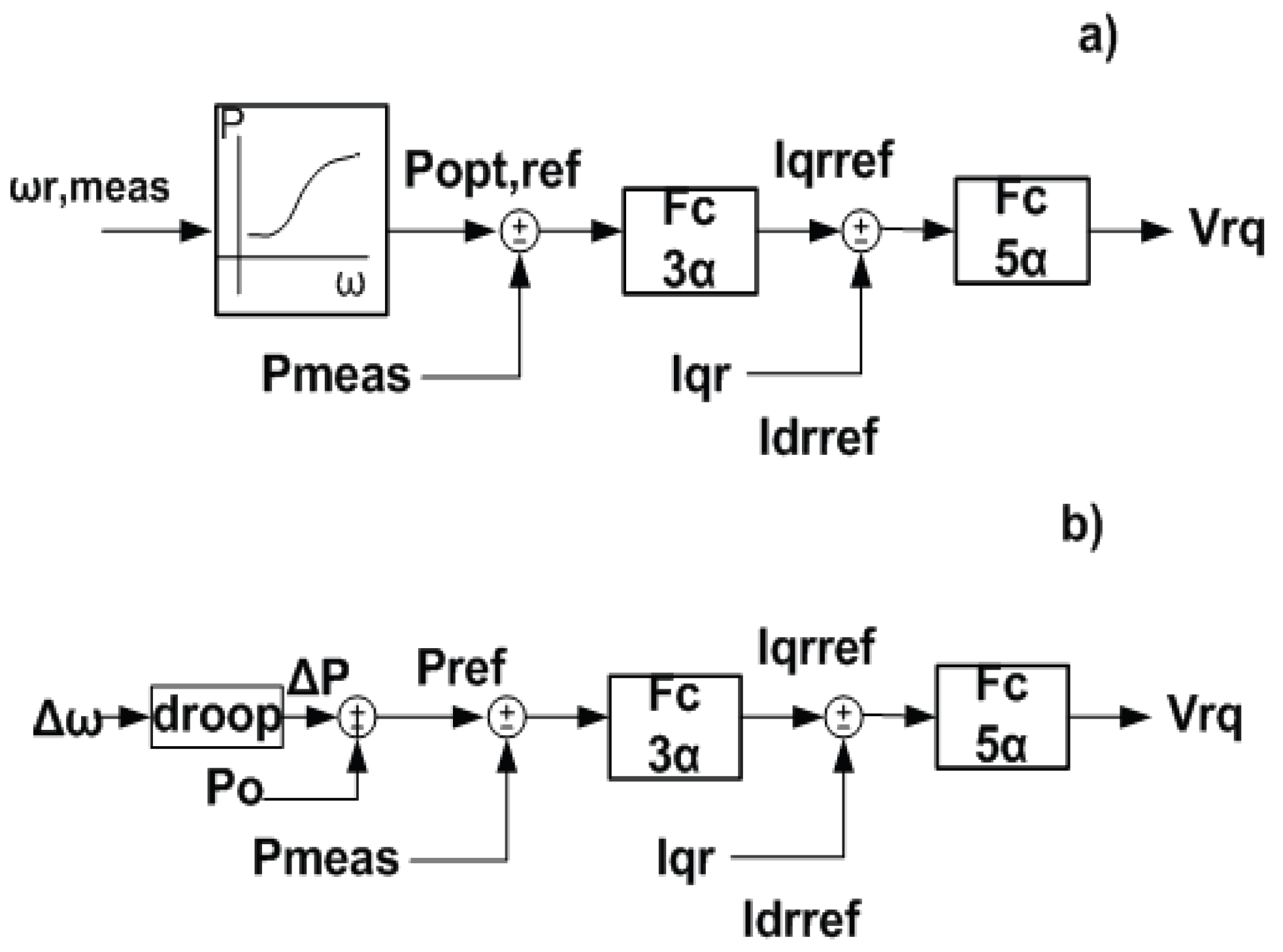
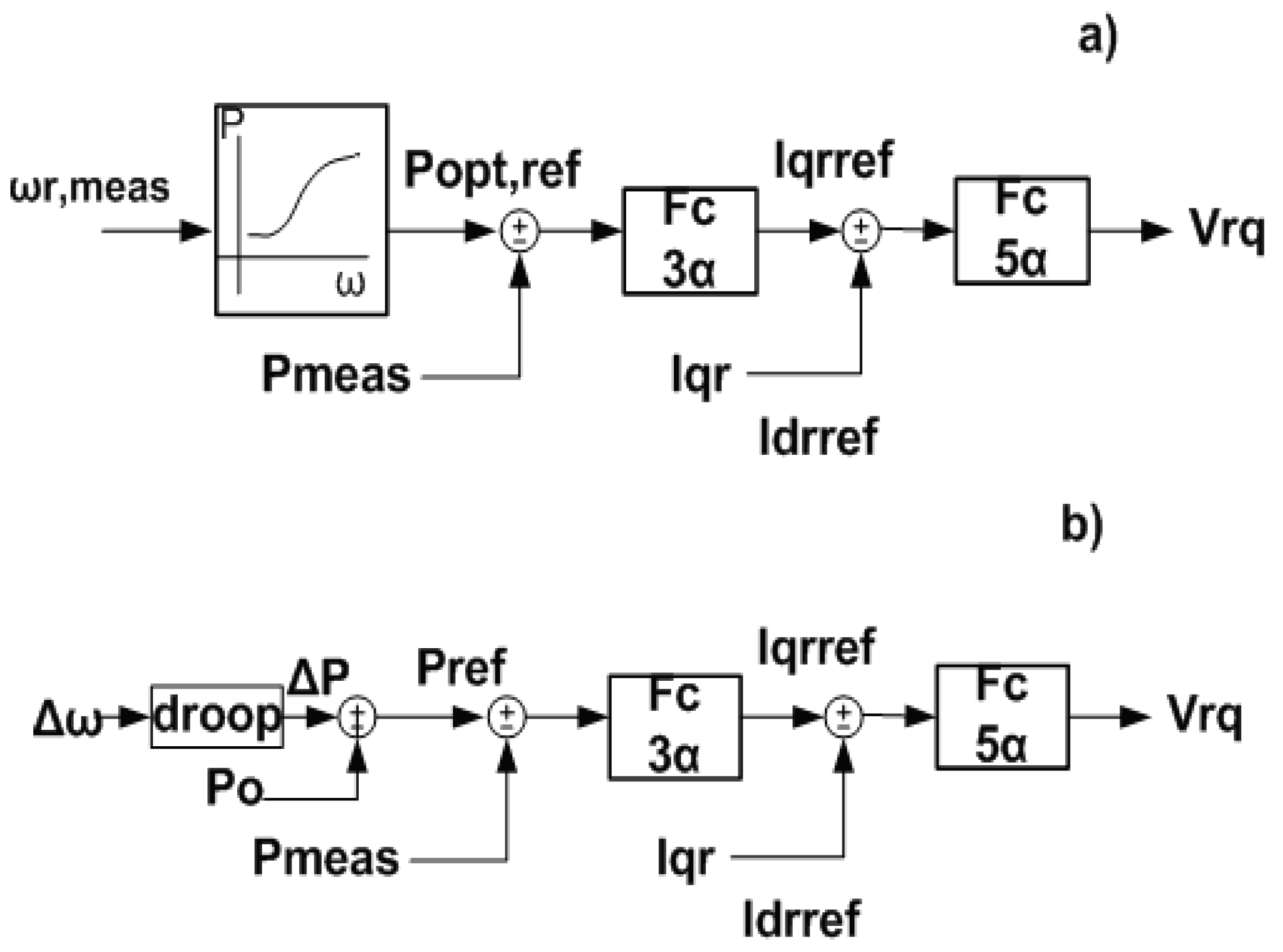
The active power controller differs in the two case studies and its configuration is shown in
Figure 6. When the microgrid includes a battery, the active power reference point of the DFIG is determined by a look-up table as shown in
Figure 6(a). Therefore for a given generator speed, the optimum reference value of the power is determined for a certain wind speed. The deviation of the measured active power from its reference value at the DFIG output P
meas is driven to Fc3α, whose output is the q component of the reference value of the rotor current, I
qrref. The reference value is compared to the measured q component of the rotor current and drives the Fc5α, whose output is the control signal Vrq.
In the second case study, the droop equation has been incorporated into the active power controller and the generator speed can be different from its optimum value. The controller forces DFIG to supply instant frequency and voltage support exploiting the WT inertia in transient conditions. The active power deviations ΔΡ is expressed by the following droop equation:
with k being the droop coefficient and Δω the deviations of the frequency measured at the output of the DFIG from its nominal value. The power deviations are added to the initial active power production of the DFIG P
o, forming the reference value for active power P
ref. It has to be clarified that the fuzzy controllers designed for both cases are the same. This is due to the fuzzy logic adaptive nature and the design of the controllers that decrease the step size in the search of the adequate output.
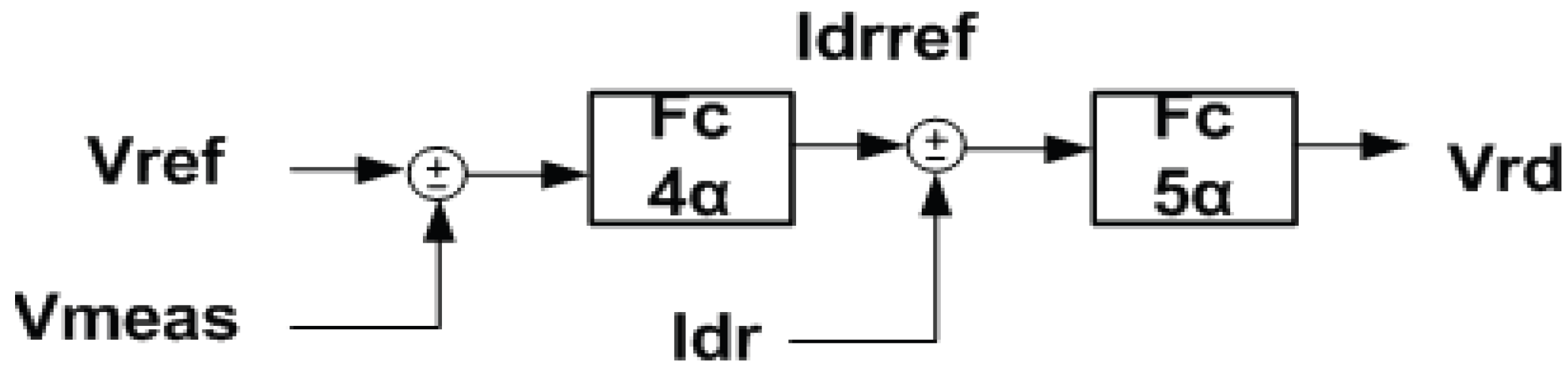
The terminal voltage controller is the same for both case studies and its configuration is shown in
Figure 7. The reference value of the voltage is compared to the measured voltage at the generator output and drives the Fc4α , whose output is the d component of the reference value of the rotor current I
drref. The deviation of the measured d component of the rotor current from the reference value drives the Fc5α whose output is the control signal Vrd.
Figure 6.
(a) Active power control of the DFIG in study case with battery included (b) active power control of the DFIG in study case without battery.
Figure 6.
(a) Active power control of the DFIG in study case with battery included (b) active power control of the DFIG in study case without battery.
Figure 7.
Terminal voltage control of the DFIG for both cases.
Figure 7.
Terminal voltage control of the DFIG for both cases.
The design of the Fc3a is presented below as a representative case of the processes followed in all the Fcs. Τhe input of the Fc3a is the error between the measured active power Pmeas and the reference value (Popt,ref or Pref). The output of the Fc3a is the deviations of the q component of the reference value of the rotor current, ΔIqrref whose values are added together in every simulation step in order to comprise the Iqrref value at steady state (in p.u.) according to the following equation:
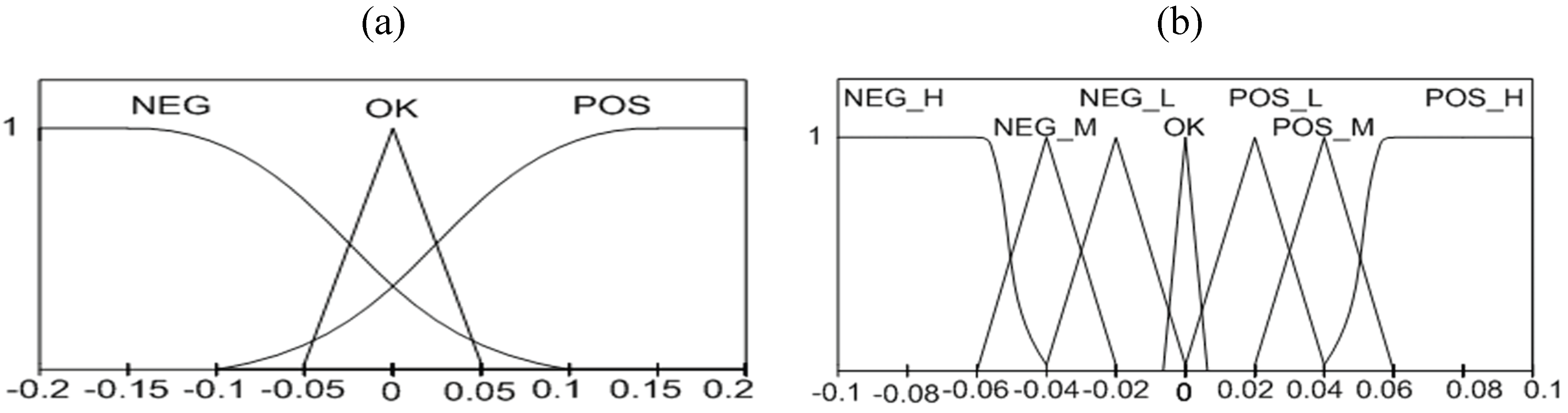
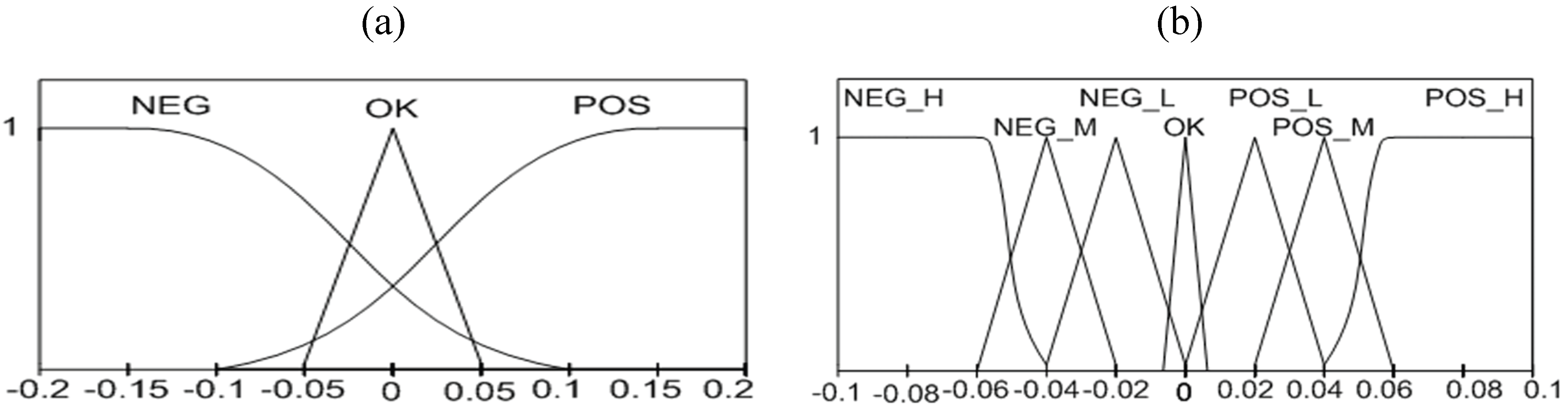
The fuzzy variables of the input of the Fc3a are expressed by the following linguistic variables: : “positive (POS)”, “ok (OK)”, “negative (NEG)”.The fuzzy variables of the output of the Fc3a are expressed by the following linguistic variables: “high positive (POS_H)”, “medium positive (POS_M)”, “low positive (POS_L)”, “ok (OK)” ,“high negative (NEG_H)”, “medium negative (NEG_M)”, “low negative (NEG_L)”. The membership functions of the input and the output are shown in
Figure 8(a) and (b), respectively.
Figure 8.
(a) Membership functions of the input signal of Fc3a. (b) Membership functions of the output signal of Fc3a.
Figure 8.
(a) Membership functions of the input signal of Fc3a. (b) Membership functions of the output signal of Fc3a.
The fuzzy reasoning is as follows:
- ○
When the measured active power at the output of the DFIG is less than the reference active power, it implies that the DFIG doesn’t deliver the needed power. In order that the DFIG delivers more power, the absolute value of the component of the reference value of the rotor current has to augment.
- ○
When the measured active power at the output of the DFIG is equal to the reference active power, it implies that the DFIG delivers the needed power. So the absolute value of the component of the reference value of the rotor current has to be the same and the output of the Fc3a has to be zero.
- ○
When the measured active power at the output of the DFIG is larger than the reference of the active power, it implies that the DFIG delivers more than the needed power. In order that the DFIG delivers less power the absolute value of the component of the reference value of the rotor current has to decrease.
The rules of the controller are shown in
Table 1.
Table 1.
Fuzzy Rules of the Fc3a.
Table 1.
Fuzzy Rules of the Fc3a.
| Fc3a Input | POS | POS | POS | OK | NEG | NEG | NEG |
| Fc3a Output | POS_H | POS_M | POS_L | OK | NEG_L | NEG_M | NEG_H |
The defuzzification in this study follows the center of area method (Center of Area COA defuzzifier).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}