

Advancements in Wind Farm Control: Modelling and Multi-Objective Optimization Through Yaw-Based Wake Steering

 ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Control Strategies for Wind Farms: Background and Objectives
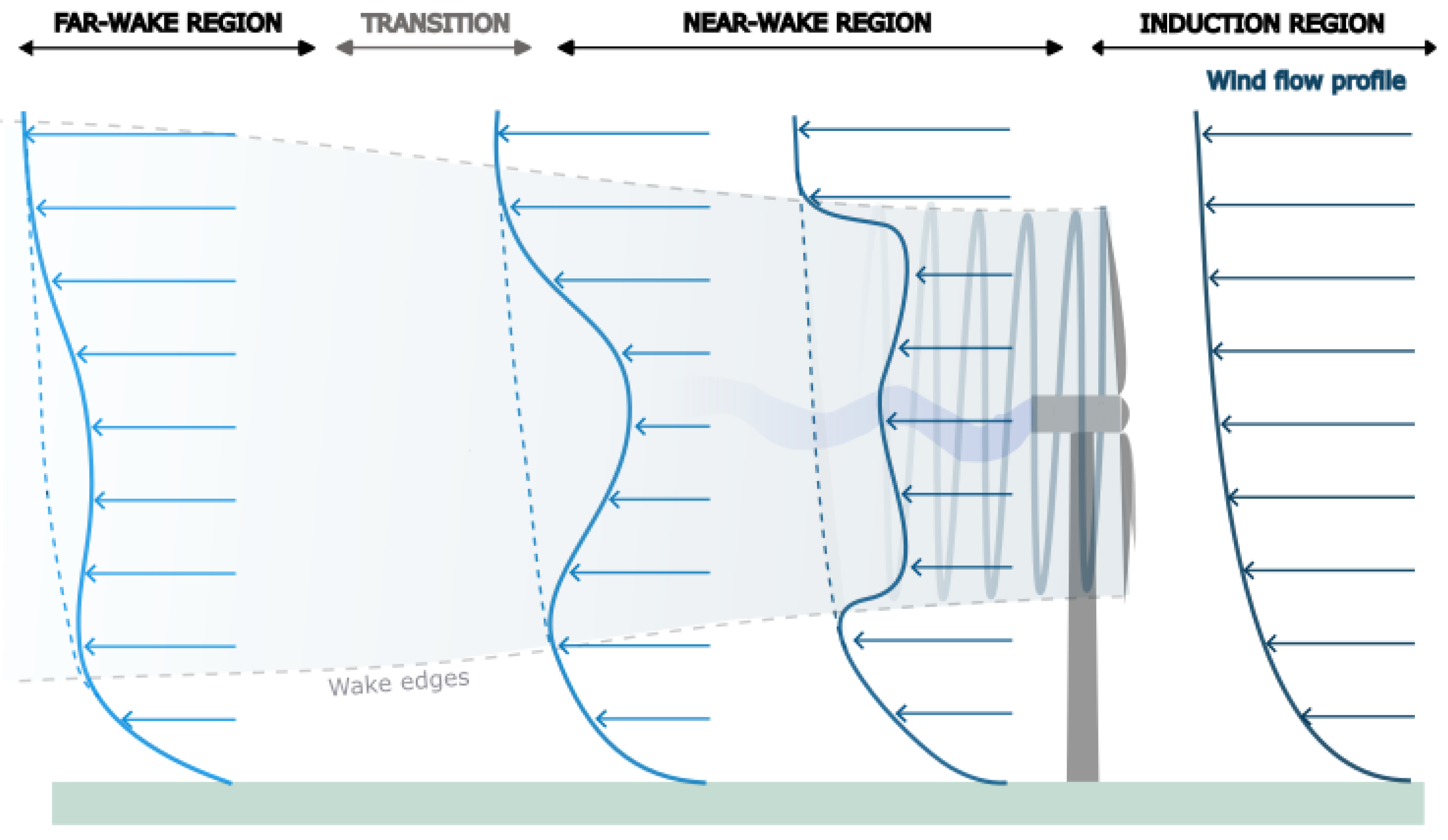
2.1. Wake Physics as a Basis for Control Strategy Design
- The near-wake region extends approximately 2–4 rotor diameters downstream of the turbine. This region is strongly influenced by the turbine’s shape and design, leading to a complex, non-uniform three-dimensional flow pattern.
- The far-wake region develops further downstream, where the influence of the turbine’s specific geometry diminishes. In this region, the mean flow characteristics can be estimated based on overall parameters such as thrust, power output, and prevailing inflow conditions.
2.2. Wind Turbine and Wind Farm Control Overview
2.2.1. Control Systems and Operating Principles
- A supervisory controller for each wind turbine;
- A dynamic controller for the different subsystems of each wind turbine.
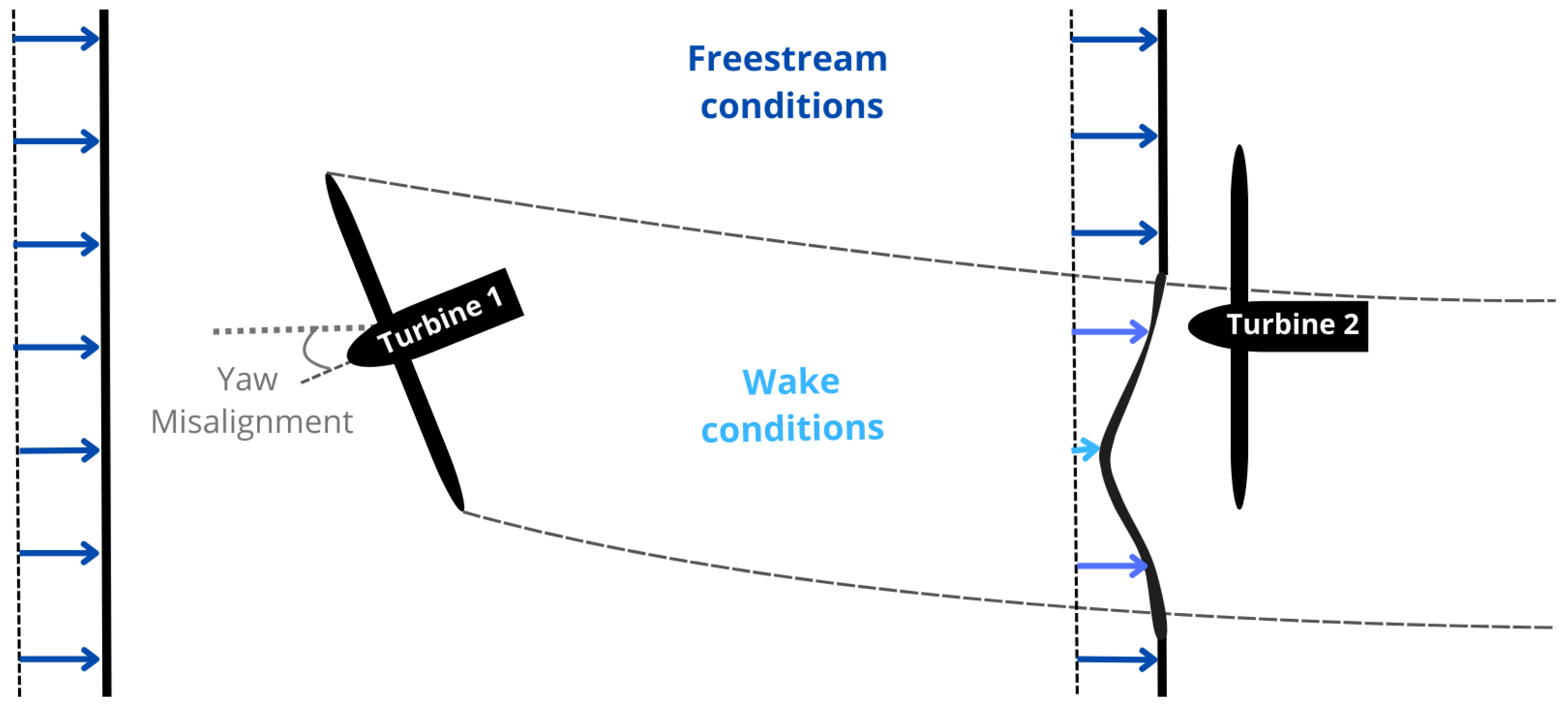
2.2.2. Wind Farm Control Strategies
2.3. Control Objectives: Achievements and Opportunities
- Increasing energy extraction: In recent evaluations comprising both academic and industrial experts [17], increased energy production is given as the foremost benefit of flow control technology. This objective has been widely explored through various simulation models, aerodynamic experiments, and real-world field assessments, offering quantifiable gains in annual energy production (AEP) and revenue. Predicted gains vary widely based on factors like turbine technology, site conditions, and resource specifics. Confidence in predicted gains hinges on the complexity of WF flow models, sensor accuracy, and data analysis sophistication.
- Reducing structural loading: Flow control in WFs has the potential to mitigate structural loading on turbines by reducing local wake-added turbulence and redirecting wakes. Fewer studies focus on this goal when compared to increasing energy extraction. Reducing structural loads can have a substantial impact, potentially influencing layout, system cost distribution, and operational strategies. Evaluating the economic benefits of load reduction is complex due to its intricate links with component durability, residual lifespan, and operations and maintenance (O&M) expenses. Nonetheless, as explained by Meyers et al. [4], there are clear advantages in pre-construction, project development, and the possibility of extending the operational lifespan of existing turbines and wind farms.
- Power regulation for grid support and balancing: WF control can play an important role in grid stability and ancillary services, offering a nuanced approach. While lumping the farm into one power plant model is a common strategy, controlling wake interactions provides advantages for services requiring the regulation of active WF power outputs over longer time spans, i.e., longer than the flow time between two consecutive turbines. WF control can sustain WTs’ aggregated power within quality requirements set by transmission system operators. The implementation of flow control strategies, such as maximizing reserve power for compensation during downregulation, enhancing its value in the balancing market, minimizing fatigue loads, and supporting asset management under dynamic electricity prices, becomes crucial for efficient WF operation and revenue maximization.
- Other improvements: Ancillary services in WF control can be grouped into several categories. First, there are electrical support services like reactive power compensation and voltage regulation, which help maintain grid stability. Second, turbine protection services address issues unrelated to structural fatigue, such as preventing leading edge erosion, mitigating icing, and protecting power electronics from overheating. Finally, there are operational modelling services, which include efforts to reduce aerodynamic noise and mitigate environmental impacts, such as bird and bat collisions. Techniques such as turbine curtailment or shutdown, active pitching, and induction control are employed for these purposes. While these controls traditionally focus on individual turbines, their integration into a multi-objective WF control optimization can enhance overall performance, profitability, and environmental impact. Moreover, the integration of hybrid WFs [19], which produce both electricity for the grid and green hydrogen, is an emerging area of interest that can further enhance the sustainability and versatility of wind energy systems.
3. From Open-Loop to Closed-Loop Control
3.1. Open-Loop Control: A Standard Approach
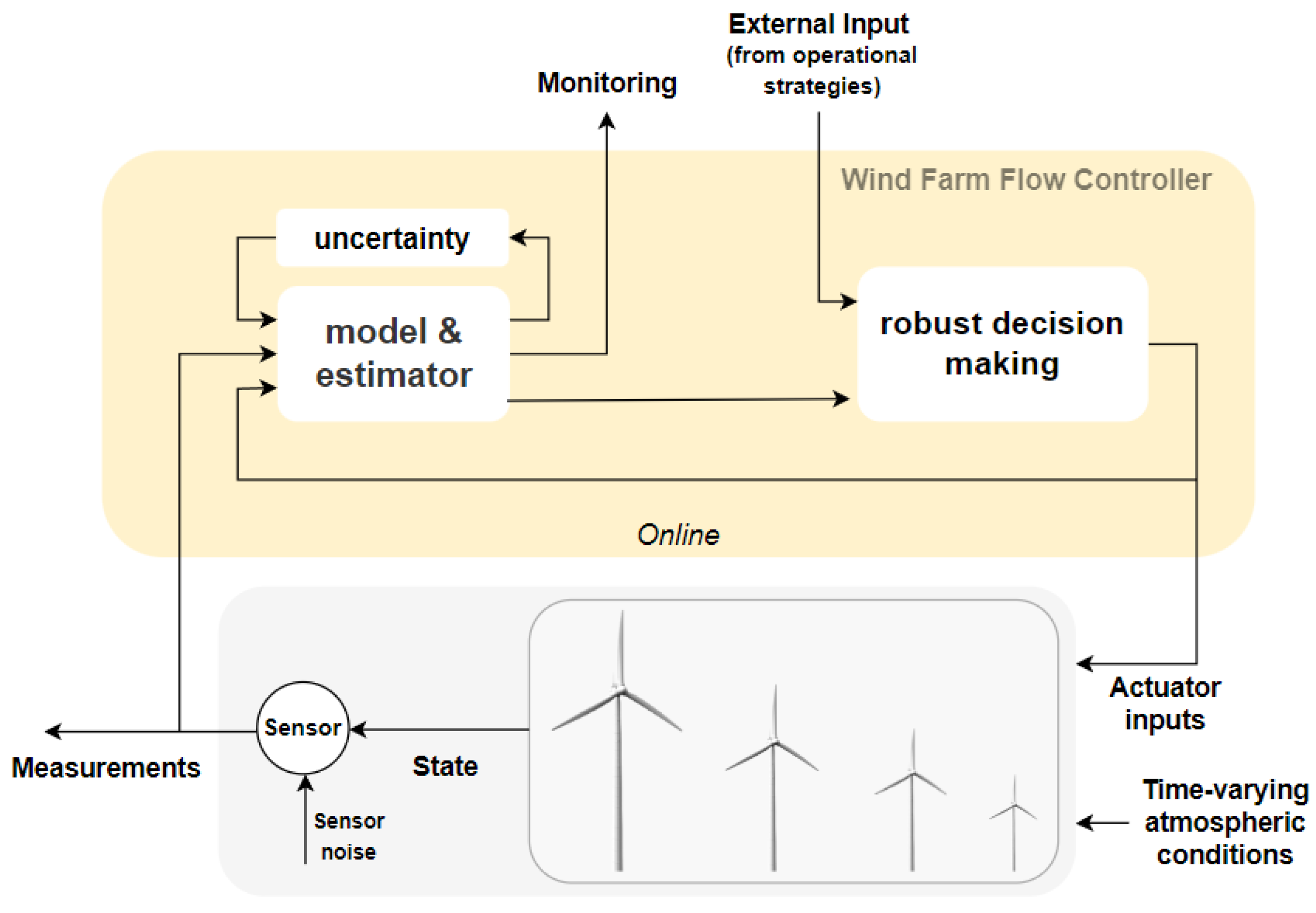
3.2. Developments on Closed-Loop Control
- Internal model: At the core of closed-loop control is the internal model, which extrapolates and predicts the future behaviour of the WF based on possible control actions. Steady-state models and dynamic engineering models serve as internal models, capturing the essential first principles necessary for predicting wake behaviour and turbine interactions. More detailed models enable comprehensive system simulations, while simplified versions facilitate controller or estimator design, with the performance of the controlled system validated against the complete model (simulator).
- Estimation or data assimilation: The accurate awareness of the WF’s current state is crucial for effective closed-loop control. Estimation techniques, such as Kalman filters, are employed to combine available measurement data with the internal model, providing real-time insights into the flow field within the WF.
- Model calibration and adaptation: The continuous refinement of the internal model is realized through calibration and adaptation. These processes involve updating the first-principle model using real-time data, ensuring that it accurately represents the flow and turbine dynamics within the WF.
- Robust decision-making: The closed-loop control strategy relies on a robust decision-making process that optimizes actuator inputs over a specified horizon. The objective function, conditioned by the data-calibrated internal model, defines the best control parameters for each WT. Receding-horizon control is commonly employed, where decisions are made iteratively based on the evolving state of the WF.
3.3. Note on Model-Free Control Approaches
4. Challenges of Numerical Modelling and Fatigue Prediction
4.1. Wake Modelling
4.2. Aero-Structural Modelling
4.3. Fatigue Prediction: Towards Reliable Multi-Objective Optimization
4.3.1. Fatigue Damage Assessment
4.3.2. Instrumentation for an Improved Assessment
4.4. Digital Twins in Wind Farm Control: Beyond the Buzzword
5. Multi-Objective Optimization Through Yaw-Based Wake Steering
5.1. Balancing Power Output and Structural Loads
5.2. Economic Optimization and Lifetime Extension
5.3. Integrating AI for Enhanced Control
5.4. Literature Synthesis: Optimization and Modelling Approaches
6. Beyond Yaw-Based Steering: Emerging Wake Control Approaches
6.1. Wake Breakup and Mixing
6.2. Rotor Tilting
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- IEA. World Energy Outlook 2022; International Energy Agency: Paris, France, 2022. [Google Scholar]
- Dong, H.; Xie, J.; Zhao, X. Wind farm control technologies: From classical control to reinforcement learning. Prog. Energy 2022, 4, 032006. [Google Scholar] [CrossRef]
- Andersson, L.E.; Anaya-Lara, O.; Dykes, K.; Fleming, P.; Gebraad, P.; Tande, J.O.; Merz, K.O. Wind farm control—Part I: A review on control system concepts and structures. IET Renew. Power Gener. 2021, 15, 2085–2108. [Google Scholar] [CrossRef]
- Meyers, J.; Bottasso, C.; Dykes, K.; Fleming, P.; Gebraad, P.; Giebel, G.; Göçmen, T.; van Wingerden, J.-W. Wind farm flow control: Prospects and challenges. Wind Energy Sci. 2022, 7, 2271–2306. [Google Scholar] [CrossRef]
- Doekemeijer, B.M.; van Wingerden, J.-W.; Fleming, P.A. A tutorial on the synthesis and validation of a closed-loop wind farm controller using a steady-state surrogate model. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 2825–2836. [Google Scholar]
- Njiri, J.G.; Söffker, D. State-of-the-art in wind turbine control: Trends and challenges. Renew. Sustain. Energy Rev. 2016, 60, 377–393. [Google Scholar] [CrossRef]
- Porté-Agel, F.; Bastankhah, M.; Shamsoddin, S. Wind-Turbine and Wind-Farm Flows: A Review. Bound.-Layer Meteorol. 2020, 174, 1–59. [Google Scholar] [CrossRef] [PubMed]
- Sawant, M.; Thakare, S.; Rao, A.P.; Feijóo-Lorenzo, A.E.; Bokde, N.D. A Review on State-of-the-Art Reviews in Wind-Turbine- and Wind-Farm-Related Topics. Energies 2021, 14, 2041. [Google Scholar] [CrossRef]
- Neunaber, I.; Hölling, M.; Stevens, R.J.A.M.; Schepers, G.; Peinke, J. Distinct Turbulent Regions in the Wake of a Wind Turbine and Their Inflow-Dependent Locations: The Creation of a Wake Map. Energies 2020, 13, 5392. [Google Scholar] [CrossRef]
- Manwell, J.F.; McGowan, J.G.; Rogers, A.L. Wind energy explained: Theory, design, and application. In Wind Energy Explained: Theory, Design, and Application, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2009; pp. 359–404. [Google Scholar]
- Deljouyi, N.; Nobakhti, A.; Abdolahi, A. Wind farm power output optimization using cooperative control methods. Wind Energy 2021, 24, 502–514. [Google Scholar] [CrossRef]
- Korb, H.; Asmuth, H.; Stender, M.; Ivanell, S. Exploring the application of reinforcement learning to wind farm control. J. Phys. Conf. Ser. 2021, 1934, 012022. [Google Scholar] [CrossRef]
- Kanev, S.K.; Savenije, F.J.; Engels, W.P. Active wake control: An approach to optimize the lifetime operation of wind farms. Wind Energy 2018, 21, 488–501. [Google Scholar] [CrossRef]
- Abkar, M.; Porté-Agel, F. Influence of the Coriolis force on the structure and evolution of wind turbine wakes. Phys. Rev. Fluids 2016, 1, 063701. [Google Scholar] [CrossRef]
- Chamorro, L.P.; Porté-Agel, F. Effects of Thermal Stability and Incoming Boundary-Layer Flow Characteristics on Wind-Turbine Wakes: A Wind-Tunnel Study. Bound.-Layer Meteorol. 2010, 136, 515–533. [Google Scholar] [CrossRef]
- Howland, F.H.; Dabiri, J.O. Influence of Wake Model Superposition and Secondary Steering on Model-Based Wake Steering Control with SCADA Data Assimilation. Energies 2021, 14, 52. [Google Scholar] [CrossRef]
- van Wingerden, J.W.; Fleming, P.A.; Göçmen, T.; Eguinoa, I.; Doekemeijer, B.M.; Dykes, K.; Lawson, M.; Simley, E.; King, J.; Astrain, D. Expert Elicitation on Wind Farm Control. J. Phys. Conf. Ser. 2020, 1618, 022025. [Google Scholar] [CrossRef]
- Kheirabadi, A.C.; Nagamune, R. A quantitative review of wind farm control with the objective of wind farm power maximization. J. Wind Eng. Ind. Aerodyn. 2019, 192, 45–73. [Google Scholar] [CrossRef]
- Lucas, T.R.; Ferreira, A.F.; Santos Pereira, R.B.; Alves, M. Hydrogen production from the WindFloat Atlantic offshore wind farm: A techno-economic analysis. Appl. Energy 2022, 15, 118481. [Google Scholar] [CrossRef]
- Doekemeijer, B.M.; Kern, S.; Maturu, S.; Kanev, S.; Salbert, B.; Schreiber, J.; Campagnolo, F.; Bottasso, C.L.; Schuler, S.; Wilts, F.; et al. Field experiment for open-loop yaw-based wake steering at a commercial onshore wind farm in Italy. Wind Energy Sci. 2021, 6, 159–176. [Google Scholar] [CrossRef]
- Annoni, J.; Fleming, P.; Scholbrock, A.; Roadman, J.; Dana, S.; Adcock, C.; Porté-Agel, F.; Raach, S.; Haizmann, F.; Schlipf, D. Analysis of control-oriented wake modeling tools using lidar field results. Wind Energy Sci. 2018, 3, 819–831. [Google Scholar] [CrossRef]
- Kim, H.; Kim, K.; Paek, I. Model Based Open-Loop Wind Farm Control Using Active Power for Power Increase and Load Reduction. Appl. Sci. 2017, 7, 1068. [Google Scholar] [CrossRef]
- Pena Martinez, J.J.; Coussy, J. Wake steering experiments in onshore and offshore wind farms. J. Phys. Conf. Ser. 2024, 2767, 092090. [Google Scholar] [CrossRef]
- Fleming, P.; Church, M.; Scholbrock, A.; Clifton, A.; Schreck, S.; Johnson, K.; Wright, A.; Gebraad, P.; Annoni, J.; Naughton, B.; et al. Detailed field test of yaw-based wake steering. J. Phys. Conf. Ser. 2016, 753, 052003. [Google Scholar] [CrossRef]
- Fleming, P.; Annoni, J.; Shah, J.J.; Wang, L.; Ananthan, S.; Zhang, Z.; Hutchings, K.; Wang, P.; Chen, W.; Chen, L. Field test of wake steering at an offshore wind farm. Wind Energy Sci. 2017, 2, 229–239. [Google Scholar] [CrossRef]
- Simley, E.; Fleming, P.; Girard, N.; Alloin, L.; Godefroy, E.; Duc, T. Results from a wake-steering experiment at a commercial wind plant: Investigating the wind speed dependence of wake-steering performance. Wind Energy Sci. 2021, 6, 1427–1453. [Google Scholar] [CrossRef]
- Doekemeijer, B.M.; van der Hoek, D.C.; van Wingerden, J.W. Closed-loop model-based wind farm control using FLORIS under time-varying inflow conditions. Renew. Energy 2020, 156, 719–730. [Google Scholar] [CrossRef]
- Campagnolo, F.; Petrovic, V.; Schreiber, J.; Nanos, E.M.; Croce, A.; Bottasso, C.L. Wind tunnel testing of a closed-loop wake deflection controller for wind farm power maximization. J. Phys. Conf. Ser. 2016, 753, 032006. [Google Scholar] [CrossRef]
- Howland, M.F.; Lele, S.K.; Dabiri, J.O. Wind farm power optimization through wake steering. Proc. Natl. Acad. Sci. USA 2019, 116, 14495–14500. [Google Scholar] [CrossRef]
- Marden, J.R.; Ruben, S.D.; Pao, L. A model-free approach to wind farm control using game theoretic methods. IEEE Trans. Control Syst. Technol. 2013, 21, 1207–1214. [Google Scholar] [CrossRef]
- Zhong, S.; Wang, X. Decentralized model-free wind farm control via discrete adaptive filtering methods. IEEE Trans. Smart Grid 2018, 9, 2529–2540. [Google Scholar] [CrossRef]
- Park, J. Contextual Bayesian optimization with trust region (CBOTR) and its application to cooperative wind farm control in region 2. Sustain. Energy Technol. Assess. 2020, 38, 100679. [Google Scholar] [CrossRef]
- Salamah, Y.B.; Ozguner, U. Distributed Extremum-Seeking for Wind Farm Power Maximization Using Sliding Mode Control. Energies 2021, 14, 828. [Google Scholar] [CrossRef]
- De Kooning, J.D.M.; Stockman, K.; De Maeyer, J.; Jarquin-Laguna, A.; Vandevelde, L. Digital Twins for Wind Energy Conversion Systems: A Literature Review of Potential Modelling Techniques Focused on Model Fidelity and Computational Load. Processes 2021, 9, 2224. [Google Scholar] [CrossRef]
- Xu, S.; Xue, Y.; Zhao, W.; Wan, D. A Review of High-Fidelity Computational Fluid Dynamics for Floating Offshore Wind Turbines. J. Mar. Sci. Eng. 2022, 10, 1357. [Google Scholar] [CrossRef]
- Jensen, N.O. A Note on Wind Turbine Interaction; Risø-M-2411; Risoe National Laboratory: Roskilde, Denmark, 1983. [Google Scholar]
- Frandsen, S.T.; Barthelmie, R.; Pryor, S.; Rathmann, O.; Larsen, S.; Højstrup, J.; Thøgersen, M. Analytical modelling of wind speed deficit in large offshore wind farms. Wind Energy 2006, 9, 39–53. [Google Scholar] [CrossRef]
- Bastankhah, M.; Porté-Agel, F. A new analytical model for wind-turbine wakes. Renew. Energy 2014, 70, 116–123. [Google Scholar] [CrossRef]
- King, J.; Fleming, P.; King, R.; Martínez-Tossas, L.A.; Bay, C.J.; Mudafort, R.; Simley, E. Control-oriented model for secondary effects of wake steering. Wind Energy Sci. 2021, 6, 701–714. [Google Scholar] [CrossRef]
- Abkar, M.; Porté-Agel, F. Influence of atmospheric stability on wind-turbine wakes: A large-eddy simulation study. Phys. Fluids 2015, 27, 035104. [Google Scholar] [CrossRef]
- Katic, I.; Højstrup, J.; Jensen, N.O. A Simple Model for Cluster Efficiency. In Proceedings of the EWEC’86, Rome, Italy, 7–9 October 1986; Volume 1, pp. 407–410. [Google Scholar]
- Fleming, P.; Annoni, J.; Churchfield, M.; Martinez-Tossas, L.A.; Gruchalla, K.; Lawson, M.; Moriarty, P. A simulation study demonstrating the importance of large-scale trailing vortices in wake steering. Wind Energy Sci. 2018, 3, 243–255. [Google Scholar] [CrossRef]
- Lin, J.W.; Zhu, W.J.; Shen, W.Z. New engineering wake model for wind farm applications. Renew. Energy 2022, 198, 1354–1363. [Google Scholar] [CrossRef]
- Gao, X.; Li, B.; Wang, T.; Sun, H.; Yang, H.; Li, Y.; Wang, Y.; Zhao, F. Investigation and validation of 3D wake model for horizontal-axis wind turbines based on field measurements. Appl. Energy 2020, 260, 114272. [Google Scholar] [CrossRef]
- Rak, B.P.; Santos Pereira, R.B. Impact of the wake deficit model on wind farm yield: A study of yaw-based control optimization. J. Wind Eng. Ind. Aerodyn. 2022, 220, 104827. [Google Scholar] [CrossRef]
- Gao, X.; Li, Y.; Zhao, F.; Sun, H. Comparisons of the accuracy of different wake models in wind farm layout optimization. Energy Explor. Exploit. 2020, 38, 1725–1741. [Google Scholar] [CrossRef]
- Kaldellis, J.K.; Triantafyllou, P.; Stinis, P. Critical evaluation of Wind Turbines’ analytical wake models. Renew. Sustain. Energy Rev. 2021, 144, 110991. [Google Scholar] [CrossRef]
- Bay, C.J.; Fleming, P.; Doekemeijer, B.; King, J.; Churchfield, M.; Mudafort, R. Addressing deep array effects and impacts to wake steering with the cumulative-curl wake model. Wind Energy Sci. 2023, 8, 401–419. [Google Scholar] [CrossRef]
- Hamilton, N.; Bay, C.J.; Fleming, P.; King, J.; Martínez-Tossas, L.A. Comparison of modular analytical wake models to the Lillgrund wind plant. J. Renew. Sustain. Energy 2020, 12, 053311. [Google Scholar] [CrossRef]
- Doekemeijer, B.M.; Simley, E.; Fleming, P. Comparison of the Gaussian wind farm model with historical data of three offshore wind farms. Energies 2022, 15, 1964. [Google Scholar] [CrossRef]
- Otter, A.; Murphy, J.; Pakrashi, V.; Robertson, A.; Desmond, C. A review of modelling techniques for floating offshore wind turbines. Wind Energy 2022, 25, 831–857. [Google Scholar] [CrossRef]
- Sayed, M.; Klein, L.; Lutz, T.; Krämer, E. The impact of the aerodynamic model fidelity on the aeroelastic response of a multi-megawatt wind turbine. Renew. Energy 2019, 140, 304–318. [Google Scholar] [CrossRef]
- Jonkman, J.; Buhl, M.L., Jr. FAST User’s Guide; NREL/EL-500-38230; NREL: Golden, CO, USA, 2005. [Google Scholar]
- Larsen, T.J.; Hansen, A.M. How 2 HAWC2, the User’s Manual; Risø-R-1597; Risø: Roskilde, Denmark, 2019. [Google Scholar]
- Uchida, T.; Kawashima, Y. New Assessment Scales for Evaluating the Degree of Risk of Wind Turbine Blade Damage Caused by Terrain-Induced Turbulence. Energies 2019, 12, 2624. [Google Scholar] [CrossRef]
- Cordle, A.; Jonkman, J. State of the art in floating wind turbine design tools. In Proceedings of the International Offshore and Polar Engineering Conference, Maui, HI, USA, 19–24 June 2011. [Google Scholar]
- Navadeh, N.; Goroshko, I.; Zhuk, Y.; Moghadam, F.E.; Fallah, A.S. Finite Element Analysis of Wind Turbine Blade Vibrations. Vibration 2021, 4, 310–322. [Google Scholar] [CrossRef]
- Hansen, M.O.L.; Sørensen, J.N.; Voutsinas, S.; Sørensen, N.; Madsen, H.A. State of the art in wind turbine aerodynamics and aeroelasticity. Prog. Aerosp. Sci. 2006, 42, 285–330. [Google Scholar] [CrossRef]
- Rezaeiha, A.; Pereira, R.; Kotsonis, M. Fluctuations of angle of attack and lift coefficient and the resultant fatigue loads for a large Horizontal Axis Wind turbine. Renew. Energy 2017, 114-B, 904–916. [Google Scholar]
- Liao, D.; Zhu, S.-P.; Correia, J.; De Jesus, A.; Veljkovic, M.; Berto, F. Fatigue reliability of wind turbines: Historical perspectives, recent developments and future prospects. Renew. Energy 2022, 200, 724–742. [Google Scholar] [CrossRef]
- Miner, M.A. Cumulative Damage in Fatigue. J. Appl. Mech. 1945, 3, 159–164. [Google Scholar] [CrossRef]
- Thomsen, K. The Statistical Variation of Wind Turbine Fatigue Loads; Risø-R-1063(EN); Risø National Laboratory: Roskilde, Denmark, 1998. [Google Scholar]
- Oliveira, G. Vibration-Based Structural Health Monitoring of Wind Turbines. Ph.D. Thesis, FEUP, Porto, Portugal, 2016. [Google Scholar]
- Pacheco, J.; Pimenta, F.; Pereira, S.; Cunha, A.; Magalhães, F. Experimental evaluation of strategies for wind turbine farm-wide fatigue damage estimation. Eng. Struct. 2023, 285, 115913. [Google Scholar] [CrossRef]
- EN 1993-1-9; Eurocode 3. Design of Steel Structures—Part 1-9: Fatigue. European Committee for Standardization: Brussels, Belgium, 2005.
- Pimenta, F.; Ribeiro, D.; Róman, A.; Magalhães, F. Predictive model for fatigue evaluation of floating wind turbines validated with experimental data. Renew. Energy 2024, 223, 119981. [Google Scholar] [CrossRef]
- DNVGL-ST-0376; Standard: Rotor Blades for Wind Turbines. DNV GL AS: Bærum, Norway, 2015.
- Pacheco, J.; Guimarães, S.; Moutinho, C.; Marques, M.; Matos, J.C.; Magalhães, F. New strategies for optimized structural monitoring of wind farms: Experimental campaign. Wind Energy Sci. 2020, 5, 983–996. [Google Scholar] [CrossRef]
- Hines, E.M.; Baxter, C.D.P.; Ciochetto, D.; Song, M.; Sparrevik, P.; Meland, H.J.; Strout, J.M.; Bradshaw, A.; Hu, S.-L.; Basurto, J.R.; et al. Structural instrumentation and monitoring of the Block Island Offshore Wind Farm. Renew. Energy 2023, 202, 1032–1045. [Google Scholar] [CrossRef]
- van Dijk, M.T.; van Wingerden, J.W.; Ashuri, T.; Li, Y. Wind farm multi-objective wake redirection for optimizing power production and loads. Energy 2017, 121, 561–569. [Google Scholar] [CrossRef]
- Bossanyi, E. Combining induction control and wake steering for wind farm energy and fatigue loads optimisation. J. Phys. Conf. Ser. 2018, 1037, 032011. [Google Scholar] [CrossRef]
- Reyes, H.M.; Kanev, S.; Doekemeijer, B.; van Wingerden, J.W. Validation of a lookup-table approach to modeling turbine fatigue loads in wind farms under active wake control. Wind Energy Sci. 2019, 4, 549–561. [Google Scholar] [CrossRef]
- Lin, M.; Porté-Agel, F. Power Maximization and Fatigue-Load Mitigation in a Wind-Turbine Array by Active Yaw Control: An LES Study. J. Phys. 2020, 1618, 042036. [Google Scholar] [CrossRef]
- Sun, J.; Chen, Z.; Yu, H.; Qian, P.; Zhang, D.; Si, Y. Multi-Objective Offshore Wind Farm Wake Redirection Optimization for Power Maximization and Load Reduction. In Proceedings of the American Control Conference, Atlanta, GA, USA, 8–10 June 2022; pp. 5235–5240. [Google Scholar]
- Sun, J.; Chen, Z.; Yu, H.; Gao, S.; Wang, B.; Ying, Y.; Sun, Y.; Qian, P.; Zhang, D.; Si, Y. Quantitative evaluation of yaw-misalignment and aerodynamic wake induced fatigue loads of offshore wind turbines. Renew. Energy 2022, 199, 71–86. [Google Scholar] [CrossRef]
- He, R.; Yang, H.; Lu, L. Optimal yaw strategy and fatigue analysis of wind turbines under the combined effects of wake and yaw control. Appl. Energy 2023, 337, 120878. [Google Scholar] [CrossRef]
- Lucas Frutuoso, T.R.; Marante Pereira, M.; Santos Pereira, R.B.; Madeira, J.F.A.; Cintra, J. Exploring the Power and Loads Paradigm: Tocha Farm Case Study. J. Phys. Conf. Ser. 2024, 2767, 092102. [Google Scholar] [CrossRef]
- Braunbehrens, R.; Anand, A.; Campagnolo, F.; Bottasso, C.L. First experimental results on lifetime-aware wind farm control. J. Phys. Conf. Ser. 2024, 2767, 032042. [Google Scholar] [CrossRef]
- Requate, N.; Meyer, T.; Hofmann, R. Maximizing value through optimized annual selection of Pareto-optimal wind turbine operating strategies. J. Phys. Conf. Ser. 2024, 2767, 032045. [Google Scholar] [CrossRef]
- He, R.; Yang, H.; Sun, S.; Lu, L.; Sun, H.; Gao, X. A machine learning-based fatigue loads and power prediction method for wind turbines under yaw control. Appl. Energy 2022, 18, 120013. [Google Scholar] [CrossRef]
- Pawar, S.; Sharma, A.; Vijayakumar, G.; Bay, C.J.; Yellapantula, S.; San, O. Towards multi-fidelity deep learning of wind turbine wakes. Renew. Energy 2022, 200, 867–879. [Google Scholar] [CrossRef]
- Guilloré, A.; Campagnolo, F.; Bottasso, C.L. A control-oriented load surrogate model based on sector-averaged inflow quantities: Capturing damage for unwaked, waked, wake-steering and curtailed wind turbines. J. Phys. Conf. Ser. 2024, 2767, 032019. [Google Scholar] [CrossRef]
- Liew, J.; Riva, R.; Friis-Møller, M.; Madeira, J.F.A.; Göçmen, T. Wind Farm Control Optimisation Under Load Constraints Via Surrogate Modelling. J. Phys. Conf. Ser. 2024, 2767, 092039. [Google Scholar] [CrossRef]
- Yang, S.; Deng, X.; Li, Q. A joint optimization framework for power and fatigue life based on cooperative wake steering of wind farm. Energy 2025, 319, 134849. [Google Scholar] [CrossRef]
- Popko, W.; Thomas, P.; Sevinc, A.; Rosemeier, M.; Batge, M.; Braun, R.; Meng, F.; Horte, D.; Balzani, C. Iwes Wind Turbine iwt-7.5-164. rev 4; Fraunhofer Institute for Wind Energy Systems IWES: Bremerhaven, Germany, 2018. [Google Scholar]
- Quaranta, H.U.; Bolnot, H.; Leweke, T. Long-wave instability of a helical vortex. J. Fluid Mech. 2015, 780, 687–716. [Google Scholar] [CrossRef]
- Premaratne, P.; Tian, W.; Hu, H. A Proper-Orthogonal-Decomposition (POD) Study of the Wake Characteristics behind a Wind Turbine Model. Energies 2022, 15, 3596. [Google Scholar] [CrossRef]
- van den Berg, D.; de Tavernier, D.; van Wingerden, J.-W. The dynamic coupling between the pulse wake mixing strategy and floating wind turbines. Wind Energy Sci. 2023, 8, 849–864. [Google Scholar] [CrossRef]
- Frederik, J.A.; Doekemeijer, B.M.; Mulders, S.P.; van Wingerden, J.-W. The helix approach: Using dynamic individual pitch control to enhance wake mixing in wind farms. Energies 2020, 23, 1739–1751. [Google Scholar] [CrossRef]
- Harvey, M.; Strivens, S.; Evans, H.; Morris, A.; Wendt, F.; Matha, D.; Phillips, S.; Hawkes, G.; Sowman, J.; Borgarino, B.; et al. Floating Wind Joint Industry Programme, Phase IV Summary Report; Carbon Trust: London, UK, 2022. [Google Scholar]
- Nanos, E.M.; Letizia, S.; Clemente, D.J.B.; Wang, C.; Rotea, M.; Iungo, V.I.; Bottasso, C. Vertical wake deflection for offshore floating wind turbines by differential ballast control. J. Phys. Conf. Ser. 2020, 1618, 022047. [Google Scholar] [CrossRef]
- Storm, R.M. Wake Control Using Rotor Tilting: Optimizing Wind Farm Energy Production Through Vertical Wake Deflection. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2018. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Optimization Framework | Aero and/or Structural Modelling | Fidelity Level |
|---|---|---|---|
| Van Dijk et al. (2017) [70] | Single cost function Gradient-based algorithm 3 × 3 WF—max. reported gains: Power: 2.8%; load reduction: 30.1% (blade) | Floris; BEM. | Low |
| Kanev et al. (2018) [13] | Single cost function Sector-based approach [Also included axial induction control.] Princess Amalia WF (60 WTs)—reported gains: Power: 1.89%; lifetime extension: 0.6% | FarmFlow SW; Focus/Phatas (BEM). | High/Low |
| Bossanyi et al. (2018) [71] | Single cost function Steady-state optimizer 6 aligned turbines WF—max. reported gains: Power: 2.06 Load reduction: 2.86% (blade) and 4.16% (tower) | WindFarmer; Bladed. | Mid |
| Reyes et al. (2019) [72] | N.A. [Lookup table (LUT) for fatigue loads constructed.] | BEM (Focus/Phatas). | Low |
| Lin et al. (2020) [73] | Intensive search: Pareto front (PF) presented. 3 aligned turbines WF—PF ranges: Power: up to 8%; yaw moment DEL: up to 50% | LES. | High |
| Sun et al. (2022) [74,75] | [Polynomial regression proposed for fatigue prediction in [75].] Genetic algorithm 3 × 3 WF—max. reported gains: Power: 12.5%; fatigue load reduction: 15.3% | Gaussian wake model; OpenFAST. | Low/Mid |
| He et al. (2022) [76,80] | [Support vector regression (SVR) for power and fatigue prediction in [80].] Single cost function Two-turbine setup | FAST.farm; OpenFAST. | Mid |
| Guilloré et al. (2024) [82] | N.A. [Surrogate model proposed for control optimization.] | FAST.farm; OpenFAST. | Mid |
| Braunbehrens et al. (2024) [78] | Single cost function 3 aligned turbines WF—profit (EUR) gains: Max. power: 107%; max. profit: 125% | Floris; [+ Static test campaign training data.] | Low/High |
| Requate et al. (2024) [79] | Multiple cost functions (VIOLA method, genetic particle swarm algorithm, interior point algorithm from IPOPT) | Aeroelastic model. [85] | Mid |
| Liew et al. (2024) [83] | Single cost function Gradient-free COBYLA algorithm 3 × 3 WF—max. reported gains: Power: 4.1%; fatigue load reduction: 10% | HAWC2Farm + HAWC2 to train the model; Pywake in optimization. | Mid/Low |
| Lucas Frutuoso et al. (2024) [77] | Multiple cost functions Direct multi-search algorithm Tocha WF (5 WTs)—max. reported gains: Power: 4.6%; Fatigue reduction: 5.7% (blade) and 84% (tower) | FLORIS; CCBlade (BEM). | Low |
| Yang et al. (2025) [84] | Multiple cost functions (double-stage optim) Bayesian machine learning 5-turbine row and 16-turbine WF Max. reported gains: Lifetime extension of 8% at the expense of less than 2% power reduction | ANN Yawed Wake Model; SOWFA (RANS/ALM coupling model). | High |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lucas Frutuoso, T.R.; Castro, R.; Pereira, R.B.S.; Moutinho, A. Advancements in Wind Farm Control: Modelling and Multi-Objective Optimization Through Yaw-Based Wake Steering. Energies 2025, 18, 2247. https://doi.org/10.3390/en18092247
Lucas Frutuoso TR, Castro R, Pereira RBS, Moutinho A. Advancements in Wind Farm Control: Modelling and Multi-Objective Optimization Through Yaw-Based Wake Steering. Energies. 2025; 18(9):2247. https://doi.org/10.3390/en18092247
Chicago/Turabian StyleLucas Frutuoso, Tiago R., Rui Castro, Ricardo B. Santos Pereira, and Alexandra Moutinho. 2025. "Advancements in Wind Farm Control: Modelling and Multi-Objective Optimization Through Yaw-Based Wake Steering" Energies 18, no. 9: 2247. https://doi.org/10.3390/en18092247
APA StyleLucas Frutuoso, T. R., Castro, R., Pereira, R. B. S., & Moutinho, A. (2025). Advancements in Wind Farm Control: Modelling and Multi-Objective Optimization Through Yaw-Based Wake Steering. Energies, 18(9), 2247. https://doi.org/10.3390/en18092247