
Status and Development Prospects of Solar-Powered Unmanned Aerial Vehicles—A Literature Review

 ,
, 
Abstract
:1. Introduction
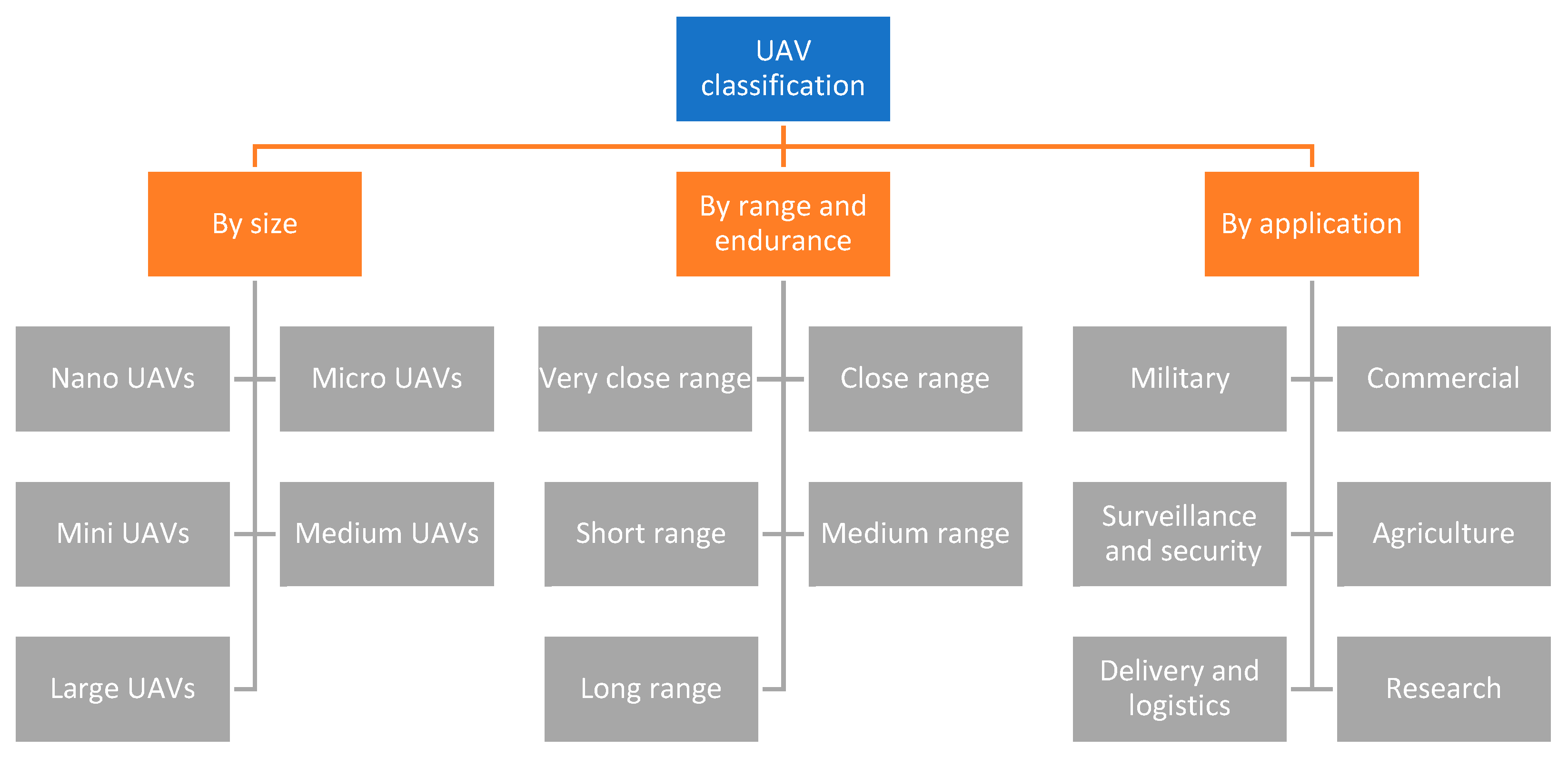
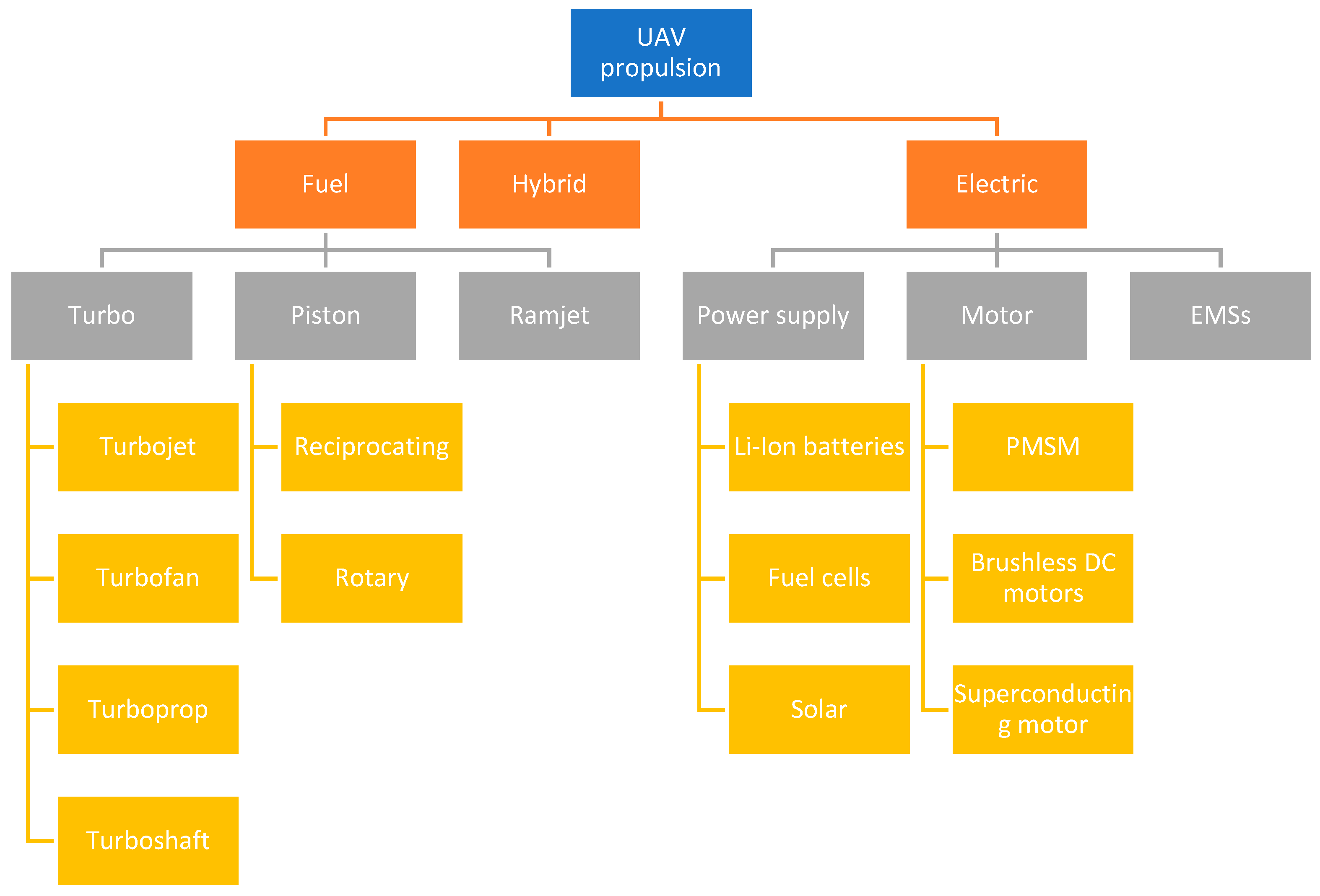
- A synthetic description of the UAV categories is presented, including classification based on the size, range, and application of aircraft, classification based on the types of propulsion systems, as well as classification based on the geometry and materials used.
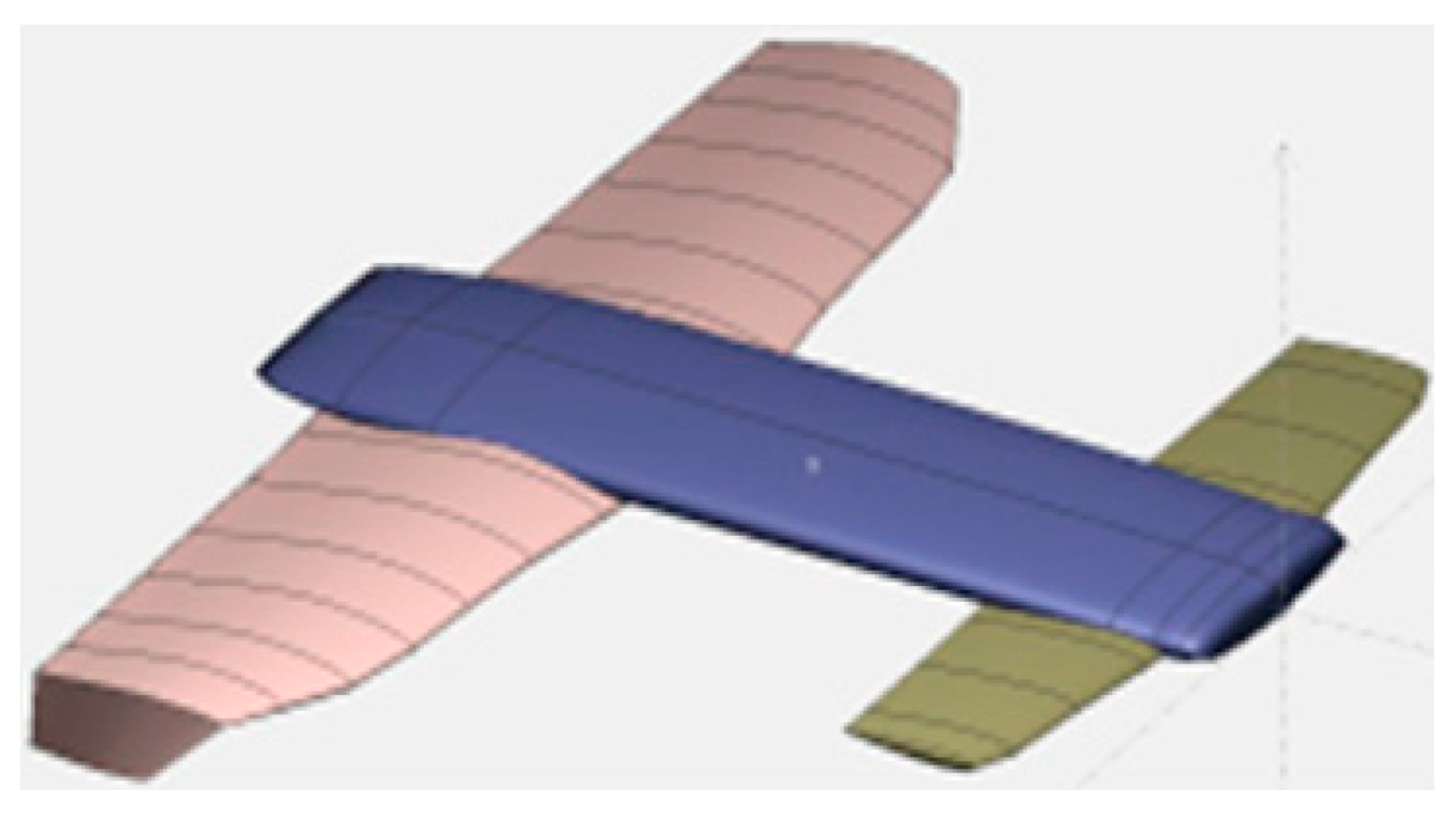
- Structural and material issues in the development of solar-powered UAVs are discussed, providing an overview of the key challenges associated with the design process of this type of aircraft.
- The methods of integration of solar cells in solar-powered UAVs are discussed, and the improvements in solar cell technologies are briefly described.
- The selection of energy storage technology for solar-powered UAVs is discussed, along with a brief comparison of the selected battery types.
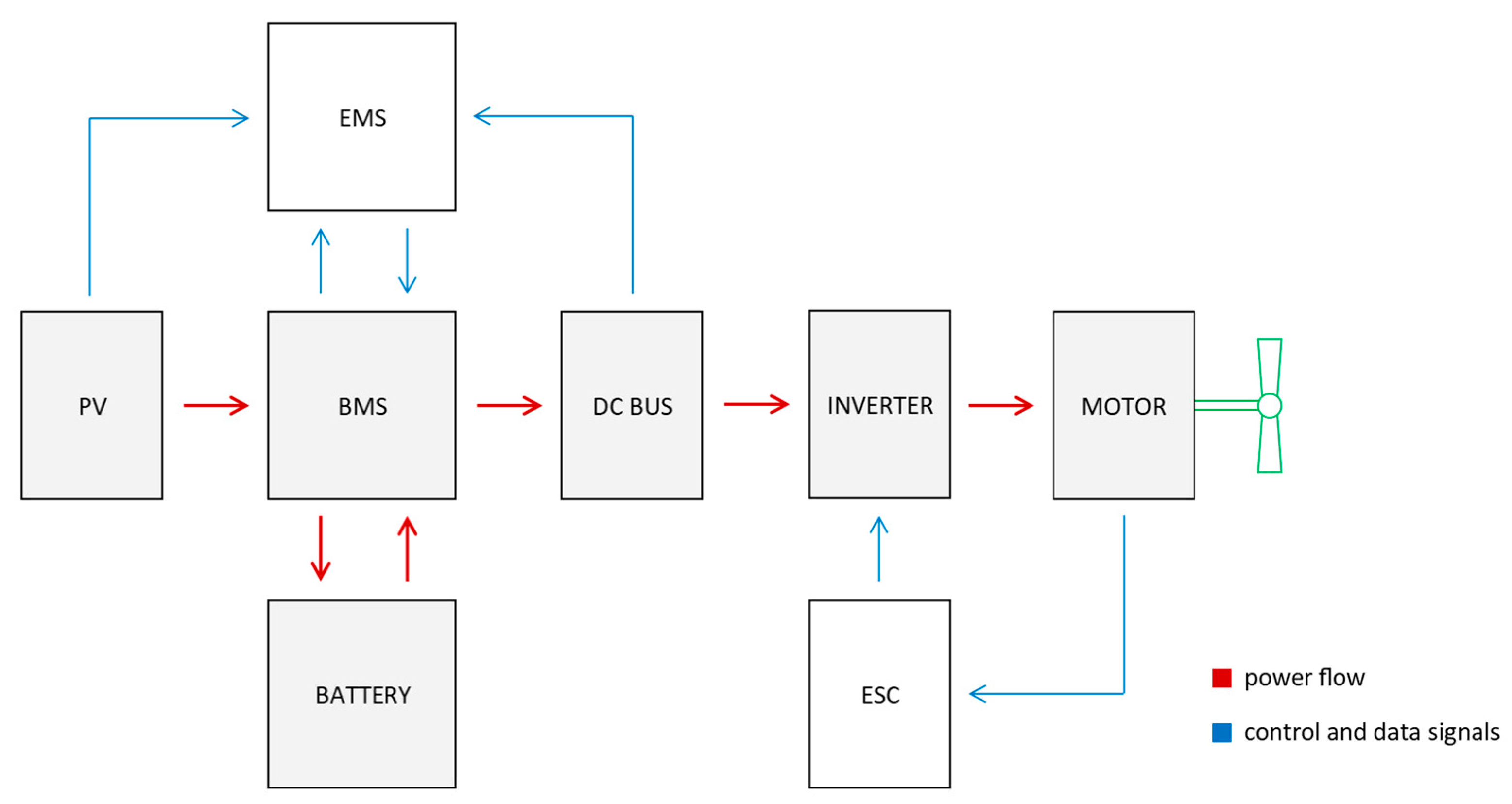
- The energy management in solar-powered UAVs is presented with a primary focus on optimizing their energy efficiency.
- Selected applications of solar-powered UAVs are discussed, providing an overview of the practical usability of these units.
- The emerging future research directions for the development of solar-powered UAVs are outlined.
2. Methodology
2.1. Criteria Applied to Ensure the Credibility and Clarity of the Review
- peer-reviewed journal articles and conference proceedings were preferred (137);
- articles published in the last 10 years were primarily considered (in total 128, including 87 articles published in the period 2020–2025 and 41 articles published in the period 2015–2019);
- articles from well-established editorial sources were mainly cited, including Elsevier, MDPI, Wiley, Springer Nature, IEEE, Frontiers, and IOPscience.
2.2. The Main Stages of the Literature Review Process
- titles and abstracts were first reviewed to assess their relevance to the topic under consideration;
- full-text articles were examined to identify scientific and technical contributions, methodologies, and findings relevant to the topic;
- the key findings were categorized into themes and then included in the relevant sections.
2.3. Limitations of the Review
- a number of industry-specific enhancements and military applications were excluded due to the proprietary nature of certain technologies;
- the review focuses on articles written in English and may overlook contributions written in other languages;
- the reliance on keyword searches may inadvertently exclude some relevant studies due to the variations in terminology.
3. General Classifications of Unmanned Aerial Vehicles
4. Structural and Material Issues in the Development of Solar-Powered UAVs
5. Integration of Solar Cells in Solar-Powered UAVs
6. Selection of Energy Storage Technology for Solar-Powered UAVs
7. Energy Management in Solar-Powered UAVs
8. Selected Applications of Solar-Powered UAVs
8.1. Surveillance Applications
8.2. Environmental Monitoring
8.3. Agricultural Applications
8.4. Wildfire Detection
9. Future Research Directions for the Development of Solar-Powered UAVs
10. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Agelli, M.; Corona, N.; Maggio, F.; Moi, P.V. Unmanned Ground Vehicles for Continuous Crop Monitoring in Agriculture: Assessing the Readiness of Current ICT Technology. Machines 2024, 12, 750. [Google Scholar] [CrossRef]
- Sornek, K.; Wiercioch, J.; Kurczyna, D.; Figaj, R.; Wójcik, B.; Borowicz, M.; Wieliński, M. Development of a Solar-Powered Small Autonomous Surface Vehicle for Environmental Measurements. Energy Convers. Manag. 2022, 267, 115953. [Google Scholar] [CrossRef]
- Wibisono, A.; Piran, M.J.; Song, H.K.; Lee, B.M. A Survey on Unmanned Underwater Vehicles: Challenges, Enabling Technologies, and Future Research Directions. Sensors 2023, 23, 7321. [Google Scholar] [CrossRef] [PubMed]
- Rajendran, P.; Smith, H. Sensitivity Analysis of Design Parameters of a Small Solar-Powered Electric Unmanned Aerial Vehicle. J. Eng. Sci. Technol. 2018, 13, 3922–3931. [Google Scholar]
- Zhang, B.; Song, Z.; Zhao, F.; Liu, C. Overview of Propulsion Systems for Unmanned Aerial Vehicles. Energies 2022, 15, 455. [Google Scholar] [CrossRef]
- Tawalbeh, M.; Al-Othman, A.; Kafiah, F.; Abdelsalam, E.; Almomani, F.; Alkasrawi, M. Environmental Impacts of Solar Photovoltaic Systems: A Critical Review of Recent Progress and Future Outlook. Sci. Total Environ. 2021, 759, 143528. [Google Scholar] [CrossRef]
- Joshi, D.; Deb, D.; Muyeen, S.M. Comprehensive Review on Electric Propulsion System of Unmanned Aerial Vehicles. Front. Energy Res. 2022, 10, 752012. [Google Scholar] [CrossRef]
- Zhu, X.; Guo, Z.; Hou, Z. Solar-Powered Airplanes: A Historical Perspective and Future Challenges. Prog. Aerosp. Sci. 2014, 71, 36–53. [Google Scholar] [CrossRef]
- Boucher, R.J. STARDUSTER—A Solar Powered High Altitude Airplane. In Proceedings of the 21st Joint Propulsion Conference, Monterey, CA, USA, 8–11 July 1985; AIAA: Reston, VA, USA, 1985. [Google Scholar] [CrossRef]
- Gonzalo, J.; López, D.; Domínguez, D.; García, A.; Escapa, A. On the capabilities and limitations of high altitude pseudo-satellites. Prog. Aerosp. Sci. 2018, 98, 37–56. [Google Scholar] [CrossRef]
- D’Oliveira, F.A.; De Melo, F.C.L.; Devezas, T.C. High-Altitude Platforms—Present Situation and Technology Trends. J. Aerosp. Technol. Manag. 2016, 8, 249–262. [Google Scholar] [CrossRef]
- Weiss, G. Around the World In a Solar Plane. IEEE Spectr. 2004, 41, 12–14. [Google Scholar] [CrossRef]
- Classification of the Unmanned Aerial Systems. Available online: https://www.e-education.psu.edu/ (accessed on 28 February 2025).
- Hassanalian, M.; Abdelkefi, A. Classifications, Applications, and Design Challenges of Drones: A Review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Al Dhafari, L.S.K.; Khan, A.A.; Al-Mahrouqi, M.A.S.; Al Alawi, M.S.K.; Al Ajmi, A.A.O.; Al Zadjali, H.H. Design and Analysis of Long Endurance Solar Powered UAV. In Proceedings of the International Conference on Aeronautical Sciences, Engineering and Technology, Muscat, Oman, 3–5 October 2023; pp. 108–116. [Google Scholar] [CrossRef]
- Anuar, K.; Fatra, W.; Akbar, M.; Nazaruddin, N.; Syafri, S.; Sari, A.W.; Utama, R.R. Design and Aerodynamic Analysis of Fixed-Wing Vertical Take-Off Landing (FW-VTOL) UAV. J. Adv. Res. Fluid Mech. Therm. Sci. 2023, 106, 136–146. [Google Scholar] [CrossRef]
- Krznar, N.; Sancic, T.; Scuric, A.; Piljek, P.; Pranjic, M.; Kotarski, D. Conventional versus Reinforced Additive Manufacturing in Unmanned Aerial Vehicle Design. In Proceedings of the 2024 5th International Conference in Electronic Engineering, Information Technology & Education (EEITE), Chania, Greece, 29–31 May 2024; pp. 1–5. [Google Scholar] [CrossRef]
- Exploring UAV Materials and Structures. Available online: https://www.uav.engineering/ (accessed on 28 February 2025).
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- Cavoukian, A.; Kursawe, K. Implementing Privacy by Design: The Smart Meter Case. In Proceedings of the 2012 IEEE International Conference on Smart Grid Engineering (SGE), Oshawa, ON, Canada, 27–29 August 2012. [Google Scholar] [CrossRef]
- Abro, G.E.M.; Zulkifli, S.A.B.M.; Masood, R.J.; Asirvadam, V.S.; Laouiti, A. Comprehensive Review of UAV Detection, Security, and Communication Advancements to Prevent Threats. Drones 2022, 6, 284. [Google Scholar] [CrossRef]
- Zhou, M.; Zhou, Z.; Liu, L.; Huang, J.; Lv, Z. Review of Vertical Take-off and Landing Fixed-Wing UAV and Its Application Prospect in Precision Agriculture. Int. J. Precis. Agric. Aviat. 2018, 1, 8–17. [Google Scholar] [CrossRef]
- Zhang, W.W.; Zhang, L.G.; Yan, Z.W.; Wang, L. Structural Design and Difficulties of Solar UAV. IOP Conf. Ser. Mater. Sci. Eng. 2019, 608, 012016. [Google Scholar] [CrossRef]
- Abbe, G.; Smith, H. Technological Development Trends in Solar-powered Aircraft Systems. Renew. Sustain. Energy Rev. 2016, 60, 770–783. [Google Scholar] [CrossRef]
- Raymer, D. Aircraft Design: A Conceptual Approach, 6th ed.; AIAA: Reston, VA, USA, 2018. [Google Scholar] [CrossRef]
- Sadraey, M.H. Aircraft Design: A Systems Engineering Approach; Wiley: Hoboken, NJ, USA, 2024. [Google Scholar]
- Scheiman, D.; Lorentzen, J.; Yoon, W.; Hoheisel, R.; Jenkins, P. Wing Integrated Solar Array Performance Study Using Photoluminescence. In Proceedings of the 2019 IEEE 46th Photovoltaic Specialists Conference (PVSC), Chicago, IL, USA, 16–21 June 2019; pp. 2774–2777. [Google Scholar] [CrossRef]
- Jiajan, W.; Kampoon, J.; Klongtrujrok, J.; Yuthayanon, I. Conceptual Design of Tactical Solar Power UAV. IOP Conf. Ser. Mater. Sci. Eng. 2019, 501, 012011. [Google Scholar] [CrossRef]
- Ahn, H.; Ahn, J. Design and Analysis of a Solar-Power Mini-UAV for Extended Endurance at Low Altitude. Int. J. Aeronaut. Space Sci. 2019, 20, 561–569. [Google Scholar] [CrossRef]
- Shiau, J.K.; Ma, D.M. Development of an Experimental Solar-Powered Unmanned Aerial Vehicle. J. Chin. Inst. Eng. 2015, 38, 701–713. [Google Scholar] [CrossRef]
- Escobar-Ruiz, A.G.; Lopez-Botello, O.; Reyes-Osorio, L.; Zambrano-Robledo, P.; Amezquita-Brooks, L.; Garcia-Salazar, O. Conceptual Design of an Unmanned Fixed-Wing Aerial Vehicle Based on Alternative Energy. Int. J. Aerosp. Eng. 2019, 2019, 8104927. [Google Scholar] [CrossRef]
- İlhan, C.; Çalik, Z. Solar-Powered Uav: A Novel Approach to Conceptual Design. Konya J. Eng. Sci. 2024, 12, 2667–8055. [Google Scholar] [CrossRef]
- Dinca, L.; Corcau, J.I.; Voinea, D.G. Solar UAVs—More Aerodynamic Efficiency or More Electrical Power? Energies 2023, 16, 3778. [Google Scholar] [CrossRef]
- García-Gascón, C.; Castelló-Pedrero, P.; García-Manrique, J.A. Minimal Surfaces as an Innovative Solution for the Design of an Additive Manufactured Solar-Powered Unmanned Aerial Vehicle (UAV). Drones 2022, 6, 285. [Google Scholar] [CrossRef]
- Li, X.; Sun, K.; Li, F. General Optimal Design of Solar-Powered Unmanned Aerial Vehicle for Priority Considering Propulsion System. Chin. J. Aeronaut. 2020, 33, 2176–2188. [Google Scholar] [CrossRef]
- Hou, Y.; Ji, C.; Liu, Z. Multi-Objective Optimization Design of Solar UAV Overall Parameters. J. Phys. Conf. Ser. 2023, 2449, 012038. [Google Scholar] [CrossRef]
- Bakar, A.; Ke, L.; Liu, H.; Xu, Z.; Wen, D. Design of Low Altitude Long Endurance Solar-Powered UAV Using Genetic Algorithm. Aerospace 2021, 8, 228. [Google Scholar] [CrossRef]
- Al Majarfi, Y.N.H.; Al Dhafari, L.S.K.; Al Saqri, L.S.A.; Roshdi, A.S.D.A.L.; Al Riyami, I.M.M.; Al Kalbani, A.Y.S. Design of a Solar System UAV. In Proceedings of the First International Conference on Aeronautical Sciences, Engineering and Technology, Muscat, Oman, 3–5 October 2023; Springer: Singapore, 2024; pp. 270–278. [Google Scholar] [CrossRef]
- Jashnani, S.; Nada, T.R.; Ishfaq, M.; Khamker, A.; Shaholia, P. Sizing and Preliminary Hardware Testing of Solar Powered UAV. Egypt. J. Remote Sens. Space Sci. 2013, 16, 189–198. [Google Scholar] [CrossRef]
- Montagnier, O.; Bovet, L. Optimisation of a Solar-Powered High Altitude Long Endurance Uav. In Proceedings of the 3rd EUropean Conference for AeroSpace Sciences, Paris, France, 6–9 July 2009. [Google Scholar]
- Oktay, T.; Uzun, M.; Kanat, O.O. Maximum Lift/Drag Ratio Improvement of TUAVs via Small Aerodynamic Modifications. Aircr. Eng. Aerosp. Technol. 2018, 90, 1438–1444. [Google Scholar] [CrossRef]
- Jaszczur, M.; Papis, K.; Ksiazek, M.; Czerwinski, G.; Wojtas, G.; Koncewicz, W.; Nabozna, S.; Wójcik, M. An Investigation of the Aerodynamic Parameters for Solar Plane Wing Profile Using CFD Modelling. Comput. Sci. 2021, 22, 123–142. [Google Scholar] [CrossRef]
- AGH Solar Plane. Available online: https://solarplane.agh.edu.pl (accessed on 28 February 2025).
- Harasani, W.; Khalid, M.; Arai, N.; Fukuda, K.; Hiraoka, K. Initial Conceptual Design and Wing Aerodynamic Analysis of a Solar Power-Based UAV. Aeronaut. J. 2014, 118, 540–554. [Google Scholar] [CrossRef]
- Guo, Q.; Qiu, M.; Li, X.; Sun, W.; Guo, Z. Integrated Design and Flight Validation of Solar-Powered Unmanned Aerial Vehicle (UAV) Structure and Propulsion System. Energies 2023, 16, 7110. [Google Scholar] [CrossRef]
- Thipyopas, C.; Warin, N. Aerodynamic Analysis of Short Landing Solar-Powered UAV for Environmental Monitoring Applications. In Unmanned Aerial Vehicle Design and Technology; Springer: Cham, Switzerland, 2024; pp. 31–52. [Google Scholar] [CrossRef]
- Hong, T.K.; Lin, C.Y.; Lin, H.J.; Ruseno, N. Taiwan Solar-Powered UAV Flight Endurance Record. Drone Syst. Appl. 2024, 12, 1–14. [Google Scholar] [CrossRef]
- Oettershagen, P.; Melzer, A.; Mantel, T.; Rudin, K.; Stastny, T.; Wawrzacz, B.; Hinzmann, T.; Leutenegger, S.; Alexis, K.; Siegwart, R. Design of Small Hand-Launched Solar-Powered UAVs: From Concept Study to a Multi-Day World Endurance Record Flight. J. Field Robot. 2017, 34, 1352–1377. [Google Scholar] [CrossRef]
- Oettershagen, P.; Melzer, A.; Mantel, T.; Rudin, K.; Lotz, R.; Siebenmann, D.; Leutenegger, S.; Alexis, K.; Siegwart, R. A Solar-Powered Hand-Launchable UAV for Low-Altitude Multi-Day Continuous Flight. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 3986–3993. [Google Scholar] [CrossRef]
- Salazar, F.; Martinez-Garcia, M.S.; de Castro, A.; Logroño, N.; Cazorla-Logroño, M.F.; Guamán-Molina, J.; Gómez, C. Optimization of the Solar Energy Storage Capacity for a Monitoring UAV. Sustain. Futures 2024, 7, 100146. [Google Scholar] [CrossRef]
- Alsahlani, A.; Rahulan, T.; Abdulhassan, N. Composite Structural Analysis of a High Altitude, Solar Powered Unmanned Aerial Vehicle. Int. J. Mech. Eng. Robot. Res. 2017, 6, 71–76. [Google Scholar] [CrossRef]
- Liller, J.; Goel, R.; Aziz, A.; Hester, J.; Nguyen, P. Development of a Battery Free, Solar Powered, and Energy Aware Fixed Wing Unmanned Aerial Vehicle. Sci. Rep. 2025, 15, 6141. [Google Scholar] [CrossRef]
- Chawla, R.; Singhal, P.; Garg, A.K. Photovoltaic Review of All Generations: Environmental Impact and Its Market Potential. Trans. Electr. Electron. Mater. 2020, 21, 456–476. [Google Scholar] [CrossRef]
- Muhammad, J.Y.; Waziri, A.B.; Shitu, A.M.; Ahmad, U.M.; Muhammad, M.H.; Alhaji, Y.; Olaniyi, A.T.; Bala, A.A. Recent Progressive Status of Materials for Solar Photovoltaic Cell: A Comprehensive Review. Sci. J. Energy Eng. 2019, 7, 77–89. [Google Scholar] [CrossRef]
- Best Research-Cell Efficiency Chart, NREL. Available online: https://www.nrel.gov/ (accessed on 28 February 2025).
- Teixeira, C.O.; Andrade, L.; Mendes, A. Easy Processing Carbon Paper Electrode for Highly Efficient Perovskite Solar Cells. J. Power Sources 2020, 479, 229071. [Google Scholar] [CrossRef]
- De Rossi, F.; Polino, G.; Brunetti, F. New Generation Flexible Printed Photovoltaic. In Sustainable Strategies in Organic Electronics; Woodhead Publishing: Cambridge, UK, 2022; pp. 463–503. [Google Scholar] [CrossRef]
- Saule Technologies. Available online: https://sauletech.com/ (accessed on 28 February 2025).
- Sampaio Saloio, J.P.; Cruz, G.; Coelho, V.; João, J.P.; Marques Lameirinhas, R.A. Experimental Study to Increase the Autonomy of a UAV by Incorporating Solar Cells. Vehicles 2023, 5, 1863–1877. [Google Scholar] [CrossRef]
- Scheiman, D.; Hoheisel, R.; Edwards, D.; Paulsen, A.; Lorentzen, J.; Yoon, W.; Carruthers, S.; Carter, S.; Kelly, M.; Jenkins, P.; et al. Solar Technology Comparison for Wing Integration in Unmanned Aerial Vehicles. In Proceedings of the 2018 IEEE 7th World Conference on Photovoltaic Energy Conversion, WCPEC 2018—A Joint Conference of 45th IEEE PVSC, 28th PVSEC and 34th EU PVSEC, Waikoloa, HI, USA, 10–15 June 2018; pp. 3539–3544. [Google Scholar] [CrossRef]
- High-Efficiency Solar Cell. Available online: https://technology.nasa.gov/patent/LEW-TOPS-50 (accessed on 28 February 2025).
- Mateja, K.; Skarka, W.; Peciak, M.; Niestrój, R.; Gude, M. Energy Autonomy Simulation Model of Solar Powered UAV. Energies 2023, 16, 479. [Google Scholar] [CrossRef]
- Łopusiewicz, R.; Książek, N. Challenges of Integrating Photovoltaic Cells onto the Wings of an Unmanned Solar-Powered Aircraft. In Proceedings of the 34th Congress of the International Council of the Aeronautical Sciences, Florence, Italy, 9–13 September 2024. [Google Scholar]
- Ionescu, O.N.; Cernica, I.; Manea, E.; Parvulescu, C.; Istrate, A.; Ionescu, G.; Suchea, M.P. Integration of Micro-Structured Photovoltaic Cells into the Ultra-Light Wing Structure for Extended Range Unmanned Aerial Vehicles. Appl. Sci. 2021, 11, 10890. [Google Scholar] [CrossRef]
- Cosson, M.; David, B.; Arzel, L.; Poizot, P.; Rhallabi, A. Modelling of Photovoltaic Production and Electrochemical Storage in an Autonomous Solar Drone. eScience 2022, 2, 235–241. [Google Scholar] [CrossRef]
- Chu, Y.; Ho, C.; Lee, Y.; Li, B. Development of a Solar-Powered Unmanned Aerial Vehicle for Extended Flight Endurance. Drones 2021, 5, 44. [Google Scholar] [CrossRef]
- Maliky, N.A.; Moelyadi, M.A.; Amalia, E. Influence of Solar Panel on Wing Aerodynamic Characteristics of HALE UAV. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1109, 012029. [Google Scholar] [CrossRef]
- Emad, G.; Atef, A.; El-Salamony, M.; Khalifa, M. Influence of Solar Panel on Wing Aerodynamic and Structural Characteristics of UAV. In Proceedings of the NILES 2022—4th Novel Intelligent and Leading Emerging Sciences Conference, Giza, Egypt, 22–24 October 2022; pp. 108–111. [Google Scholar] [CrossRef]
- Carmo, J.E.; Torres, J.P.N.; Cruz, G.; Marques Lameirinhas, R.A. Effect of the Inclusion of Photovoltaic Solar Panels in the Autonomy of UAV Time of Flight. Energies 2021, 14, 876. [Google Scholar] [CrossRef]
- Perez-Rosado, A.; Bruck, H.A.; Gupta, S.K. Integrating Solar Cells into Flapping Wing Air Vehicles for Enhanced Flight Endurance. J. Mech. Robot. 2016, 8, 051006. [Google Scholar] [CrossRef]
- Abidali, A.; Agha, S.A.; Munjiza, A.; Shaheed, M.H. Development of a Solar Powered Multirotor Micro Aerial Vehicle. Sci. Rep. 2024, 14, 5771. [Google Scholar] [CrossRef]
- The Engineer—Ultra-Thin Solar Cells for Self-Sufficient Drones and Sustainable Aviation. Available online: https://www.theengineer.co.uk/ (accessed on 28 February 2025).
- Noth, A. Design of Solar Powered Airplanes for Continuous Flight. Ph.D. Thesis, ETH Zurich, Zurich, Switzerland, 2008. [Google Scholar]
- Rajendran, P.; Smith, H. Review of Solar and Battery Power System Development for Solar-Powered Electric Unmanned Aerial Vehicles. Adv. Mat. Res. 2015, 1125, 641–647. [Google Scholar] [CrossRef]
- Zhang, R.; Li, X.; Sun, C.; Yang, S.; Tian, Y.; Tian, J. State of Charge and Temperature Joint Estimation Based on Ultrasonic Reflection Waves for Lithium-Ion Battery Applications. Batteries 2023, 9, 335. [Google Scholar] [CrossRef]
- Verma, D.; Nema, S.; Shandilya, A.M.; Dash, S.K. Maximum Power Point Tracking (MPPT) Techniques: Recapitulation in Solar Photovoltaic Systems. Renew. Sustain. Energy Rev. 2016, 54, 1018–1034. [Google Scholar] [CrossRef]
- Saravanakumar, Y.N.; Sultan, M.T.H.; Shahar, F.S.; Giernacki, W.; Łukaszewicz, A.; Nowakowski, M.; Holovatyy, A.; Stępień, S. Power Sources for Unmanned Aerial Vehicles: A State-of-the Art. Appl. Sci. 2023, 13, 11932. [Google Scholar] [CrossRef]
- Badyda, K.; Krawczyk, P.; Townsend, A.; Gouws, R. A Comparative Review of Lead-Acid, Lithium-Ion and Ultra-Capacitor Technologies and Their Degradation Mechanisms. Energies 2022, 15, 4930. [Google Scholar] [CrossRef]
- Ruan, L.; Wang, J.; Chen, J.; Xu, Y.; Yang, Y.; Jiang, H.; Zhang, Y.; Xu, Y. Energy-Efficient Multi-UAV Coverage Deployment in UAV Networks: A Game-Theoretic Framework. China Commun. 2018, 15, 194–209. [Google Scholar] [CrossRef]
- Pekias, A.; Maraslidis, G.S.; Tsipouras, M.G.; Koumboulis, F.N.; Fragulis, G.F. Power Supply Technologies for Drones and Machine Vision Applications: A Comparative Analysis and Future Trends. Telecom 2023, 4, 459–476. [Google Scholar] [CrossRef]
- Miao, Y.; Hynan, P.; Von Jouanne, A.; Yokochi, A. Current Li-Ion Battery Technologies in Electric Vehicles and Opportunities for Advancements. Energies 2019, 12, 1074. [Google Scholar] [CrossRef]
- Pham, N.N.; Leuchter, J.; Pham, K.L.; Dong, Q.H. Battery Management System for Unmanned Electric Vehicles with CAN BUS and Internet of Things. Vehicles 2022, 4, 639–662. [Google Scholar] [CrossRef]
- Jiao, S.; Zhang, G.; Zhou, M.; Li, G. A Comprehensive Review of Research Hotspots on Battery Management Systems for UAVs. IEEE Access 2023, 11, 84636–84650. [Google Scholar] [CrossRef]
- Kovachev, G.; Astner, A.; Gstrein, G.; Aiello, L.; Hemmer, J.; Sinz, W.; Ellersdorfer, C. Thermal Conductivity in Aged Li-Ion Cells under Various Compression Conditions and State-of-Charge. Batteries 2021, 7, 42. [Google Scholar] [CrossRef]
- Gao, Y.; Qiao, Z.; Pei, X.; Wu, G.; Bai, Y. Design of Energy-Management Strategy for Solar-Powered UAV. Sustainability 2023, 15, 14972. [Google Scholar] [CrossRef]
- Martin, R.A.; Gates, N.S.; Ning, A.; Hedengren, J.D. Dynamic Optimization of High-Altitude Solar Aircraft Trajectories Under Station-Keeping Constraints. J. Guid. Control Dyn. 2018, 42, 538–552. [Google Scholar] [CrossRef]
- Dwivedi, P.; Sudhakar, K.; Soni, A.; Solomin, E.; Kirpichnikova, I. Advanced Cooling Techniques of P.V. Modules: A State of Art. Case Stud. Therm. Eng. 2020, 21, 100674. [Google Scholar] [CrossRef]
- Zhang, Z.J.; Ji, R.T.; Wang, Y.; Chang, M.; Ma, X.P.; Sha, J.; Mao, D.L. An Improved Energy Management Strategy for the Solar Powered Unmanned Aerial Vehicle at the Extreme Condition. J. Energy Storage 2021, 43, 103114. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, C.; Li, L.; Guo, Q. Parameter Analysis of Power System for Solar-Powered Unmanned Aerial Vehicle. Appl. Energy 2021, 295, 117031. [Google Scholar] [CrossRef]
- Oktay, T.; Coban, S. Simultaneous Longitudinal and Lateral Flight Control Systems Design for Both Passive and Active Morphing TUAVs. Elektron. Elektrotechnika 2017, 23, 15–20. [Google Scholar] [CrossRef]
- Li, S.; Fang, Z.; Verma, S.C.; Wei, J.; Savkin, A.V. Navigation and Deployment of Solar-Powered Unmanned Aerial Vehicles for Civilian Applications: A Comprehensive Review. Drones 2024, 8, 42. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Path Planning for a Solar-Powered UAV Inspecting Mountain Sites for Safety and Rescue. Energies 2021, 14, 1968. [Google Scholar] [CrossRef]
- Fu, Y.; Mei, H.; Wang, K.; Yang, K. Joint Optimization of 3D Trajectory and Scheduling for Solar-Powered UAV Systems. IEEE Trans. Veh. Technol. 2021, 70, 3972–3977. [Google Scholar] [CrossRef]
- Sehrawat, N.; Vashisht, S.; Singh, A.; Dhiman, G.; Viriyasitavat, W.; Alghamdi, N.S. A Power Prediction Approach for a Solar-Powered Aerial Vehicle Enhanced by Stacked Machine Learning Technique. Comput. Electr. Eng. 2024, 115, 109128. [Google Scholar] [CrossRef]
- Vashisht, S.; Jain, S. Software-Defined Network-Enabled Opportunistic Offloading and Charging Scheme in Multi-Unmanned Aerial Vehicle Ecosystem. Int. J. Commun. Syst. 2019, 32, e3939. [Google Scholar] [CrossRef]
- Liu, H.; Bashir, M.S.; Alouini, M.-S. 3-D Position Optimization of Solar-Powered Hovering UAV Relay in Optical Wireless Backhaul. IEEE Trans. Aerosp. Electron. Syst. 2024, 1–37. [Google Scholar] [CrossRef]
- Song, X.; Chang, Z.; Guo, X.; Wu, P.; Hamalainen, T. Energy Efficient Optimization for Solar-Powered UAV Communications System. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021. [Google Scholar] [CrossRef]
- Arum, S.C.; Grace, D.; Mitchell, P.D.; Zakaria, M.D.; Morozs, N. Energy Management of Solar-Powered Aircraft-Based High Altitude Platform for Wireless Communications. Electronics 2020, 9, 179. [Google Scholar] [CrossRef]
- Cheng, S.H.; Hsiao, H.C. DDPG-Driven RIS-Assisted Data Acquisition with a Solar-Powered Multi-Rotor UAV. In Proceedings of the 2024 IEEE 4th International Conference on Electronic Communications, Internet of Things and Big Data, (ICEIB), Taipei, Taiwan, 19–21 April 2024; pp. 1–7. [Google Scholar] [CrossRef]
- Al Dhafari, L.S.; Afzal, A.; Al Abri, O.K.; Khan, A. Solar-Powered UAVs: A Systematic Literature Review. In Proceedings of the 2nd International Conference on Unmanned Vehicle Systems-Oman (UVS), Muscat, Oman, 12–14 February 2024. [Google Scholar] [CrossRef]
- Sathishkumar, S.; Gowthaman, M.; Gunasekaran, K.; Ranjith, M. Development of Solar Drone for Surveillance. Int. J. Eng. Res. Technol. 2024, 12. [Google Scholar] [CrossRef]
- Betancourth, N.J.P.; Villamarin, J.E.P.; Rios, J.J.V.; Bravo-Mosquera, P.D.; Cerón-Muñoz, H.D. Design and Manufacture of a Solar-Powered Unmanned Aerial Vehicle for Civilian Surveillance Missions. J. Aerosp. Technol. Manag. 2016, 8, 385–396. [Google Scholar] [CrossRef]
- Dwivedi, V.S.; Patrikar, J.; Addamane, A.; Ghosh, A.K. Maraal: A Low Altitude Long Endurance Solar Powered UAV For Surveillance and Mapping Applications. In Proceedings of the 2018 23rd International Conference on Methods & Models in Automation & Robotics (MMAR), Miedzyzdroje, Poland, 27–30 August 2018; pp. 449–454. [Google Scholar] [CrossRef]
- Nabisha, A.; Shajin, V.; Arun, P.R. Self-Consuming Solar-Powered Campus Monitoring Drone. World J. Adv. Eng. Technol. Sci. 2024, 2024, 407–413. [Google Scholar] [CrossRef]
- Shanmugasundar, G.; Shanker, A.G.; Vinothabhilash, V.S.; Vijayalayan, K.; Jayaraman, S. Design and Fabrication of Solar Powered Surveillance Drone for Women Safety. In AIP Conference Proceedings; AIP Publishing: Melville, NY, USA, 2022; Volume 2393. [Google Scholar] [CrossRef]
- Zhang, J. A Covert Surveillance Strategy for a Solar-Powered UAV over Suspicious Mobile Target. In Proceedings of the 2022 14th International Conference on Computer and Automation Engineering (ICCAE), Brisbane, Australia, 25–27 March 2022; pp. 8–12. [Google Scholar] [CrossRef]
- Vijayanandh, R.; Darshan Kumar, J.; Senthil Kumar, M.; Ahilla Bharathy, L.; Raj Kumar, G. Design and Fabrication of Solar Powered Unmanned Aerial Vehicle for Border Surveillance; Springer Series in Geomechanics and Geoengineering; Springer: Cham, Switzerland, 2019; pp. 61–71. [Google Scholar] [CrossRef]
- Fixed-Wing Solar Drone—Security and Defense—Marine Instruments. Available online: https://www.marineinstruments.es/ (accessed on 28 February 2025).
- Huang, H.; Savkin, A.V. Energy-Efficient Autonomous Navigation of Solar-Powered UAVs for Surveillance of Mobile Ground Targets in Urban Environments. Energies 2020, 13, 5563. [Google Scholar] [CrossRef]
- Solar Powered Drone Project for Smarter Environmental Monitoring. Available online: https://arka360.com/ (accessed on 28 February 2025).
- Simo, A.; Dzitac, S.; Dzitac, I.; Frigura-Iliasa, M.; Frigura-Iliasa, F.M. Air Quality Assessment System Based on Self-Driven Drone and LoRaWAN Network. Comput. Commun. 2021, 175, 13–24. [Google Scholar] [CrossRef]
- Almalki, F.A.; Salem, S.M.; Fawzi, W.M.; Alfeteis, N.S.; Esaifan, S.A.; Alharthi, A.S.; Alnefaiey, R.Z.; Naith, Q.H. Coupling an Autonomous UAV With a ML Framework for Sustainable Environmental Monitoring and Remote Sensing. Int. J. Aerosp. Eng. 2024, 2024, 4285475. [Google Scholar] [CrossRef]
- Watai, T.; Machida, T.; Ishizaki, N.; Inoue, G. A Lightweight Observation System for Atmospheric Carbon Dioxide Concentration Using a Small Unmanned Aerial Vehicle. J. Atmos. Ocean Technol. 2006, 23, 700–710. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, C.; Meng, Y.; Ren, X.; Wang, X. Reinforcement Learning-Based Moving-Target Enclosing Control for an Unmanned Surface Vehicle in Multi-Obstacle Environments. Ocean Eng. 2024, 304, 117920. [Google Scholar] [CrossRef]
- Thipyopas, C.; Sripawadkul, V.; Warin, N. Design and Development of a Small Solar-Powered UAV for Environmental Monitoring Application. In Proceedings of the 2019 IEEE Eurasia Conference on IOT, Communication and Engineering (ECICE), Yunlin, Taiwan, 3–6 October 2019; pp. 316–319. [Google Scholar] [CrossRef]
- Zhao, X.; Zhou, Z.; Zhu, X.; Guo, A. Design of a Hand-Launched Solar-Powered Unmanned Aerial Vehicle (UAV) System for Plateau. Appl. Sci. 2020, 10, 1300. [Google Scholar] [CrossRef]
- Malaver, A.; Motta, N.; Corke, P.; Gonzalez, F. Development and Integration of a Solar Powered Unmanned Aerial Vehicle and a Wireless Sensor Network to Monitor Greenhouse Gases. Sensors 2015, 15, 4072–4096. [Google Scholar] [CrossRef]
- Solar-Powered Drone Designed for Long-Range Aerial Monitoring. Available online: https://www.startupselfie.net/ (accessed on 28 February 2025).
- Makam, S.; Komatineni, B.K.; Meena, S.S.; Meena, U. Unmanned Aerial Vehicles (UAVs): An Adoptable Technology for Precise and Smart Farming. Discov. Internet Things 2024, 4, 12. [Google Scholar] [CrossRef]
- Khose, S.B.; Mailapalli, D.R. Spatial Mapping of Soil Moisture Content Using Very-High Resolution UAV-Based Multispectral Image Analytics. Smart Agric. Technol. 2024, 8, 100467. [Google Scholar] [CrossRef]
- Zhihao, W.; Wei, F. UV-NDVI for Real-Time Crop Health Monitoring in Vertical Farms. Smart Agric. Technol. 2024, 8, 100462. [Google Scholar] [CrossRef]
- Song, Y.; Bi, J.; Wang, X. Design and Implementation of Intelligent Monitoring System for Agricultural Environment in IoT. Internet Things 2024, 25, 101029. [Google Scholar] [CrossRef]
- Tzounis, A.; Katsoulas, N.; Bartzanas, T.; Kittas, C. Internet of Things in Agriculture, Recent Advances and Future Challenges. Biosyst. Eng. 2017, 164, 31–48. [Google Scholar] [CrossRef]
- Nex, F.; Armenakis, C.; Cramer, M.; Cucci, D.A.; Gerke, M.; Honkavaara, E.; Kukko, A.; Persello, C.; Skaloud, J. UAV in the Advent of the Twenties: Where We Stand and What Is Next. ISPRS J. Photogramm. Remote Sens. 2022, 184, 215–242. [Google Scholar] [CrossRef]
- Faiçal, B.S.; Freitas, H.; Gomes, P.H.; Mano, L.Y.; Pessin, G.; de Carvalho, A.C.P.L.F.; Krishnamachari, B.; Ueyama, J. An Adaptive Approach for UAV-Based Pesticide Spraying in Dynamic Environments. Comput. Electron. Agric. 2017, 138, 210–223. [Google Scholar] [CrossRef]
- Pansy, D.L.; Murali, M. UAV Hyperspectral Remote Sensor Images for Mango Plant Disease and Pest Identification Using MD-FCM and XCS-RBFNN. Environ. Monit. Assess 2023, 195, 1120. [Google Scholar] [CrossRef]
- Canicattì, M.; Vallone, M. Drones in Vegetable Crops: A Systematic Literature Review. Smart Agric. Technol. 2024, 7, 100396. [Google Scholar] [CrossRef]
- Puri, V.; Nayyar, A.; Raja, L. Agriculture Drones: A Modern Breakthrough in Precision Agriculture. J. Stat. Manag. Syst. 2017, 20, 507–518. [Google Scholar] [CrossRef]
- Ayamga, M.; Akaba, S.; Nyaaba, A.A. Multifaceted Applicability of Drones: A Review. Technol. Forecast. Soc. Change 2021, 167, 120677. [Google Scholar] [CrossRef]
- Alonso, R.S.; Sittón-Candanedo, I.; García, Ó.; Prieto, J.; Rodríguez-González, S. An Intelligent Edge-IoT Platform for Monitoring Livestock and Crops in a Dairy Farming Scenario. Ad Hoc Networks 2020, 98, 102047. [Google Scholar] [CrossRef]
- Katekar, V.; Cheruku, J.K. The Application of Drone Technology for Sustainable Agriculture in India. Curr. Agric. Res. J. 2023, 10, 352–365. [Google Scholar] [CrossRef]
- Dhiman, G.; Bhattacharya, J.; Roy, S. Soil Textures and Nutrients Estimation Using Remote Sensing Data in North India—Punjab Region. Procedia Comput. Sci. 2023, 218, 2041–2048. [Google Scholar] [CrossRef]
- Marcone, A.; Impollonia, G.; Croci, M.; Blandinières, H.; Pellegrini, N.; Amaducci, S. Garlic Yield Monitoring Using Vegetation Indices and Texture Features Derived from UAV Multispectral Imagery. Smart Agric. Technol. 2024, 8, 100513. [Google Scholar] [CrossRef]
- Li, W.; Liu, C.; Yang, Y.; Awais, M.; Li, W.; Ying, P.; Ru, W.; Cheema, M.J.M. A UAV-Aided Prediction System of Soil Moisture Content Relying on Thermal Infrared Remote Sensing. Int. J. Environ. Sci. Technol. 2022, 19, 9587–9600. [Google Scholar] [CrossRef]
- Cañadas, J.; Sánchez-Molina, J.A.; Rodríguez, F.; del Águila, I.M. Improving Automatic Climate Control with Decision Support Techniques to Minimize Disease Effects in Greenhouse Tomatoes. Inf. Process. Agric. 2017, 4, 50–63. [Google Scholar] [CrossRef]
- dos Santos, U.J.L.; Pessin, G.; da Costa, C.A.; da Rosa Righi, R. AgriPrediction: A Proactive Internet of Things Model to Anticipate Problems and Improve Production in Agricultural Crops. Comput. Electron. Agric. 2019, 161, 202–213. [Google Scholar] [CrossRef]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A Compilation of UAV Applications for Precision Agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Al-Thani, N.; Albuainain, A.; Alnaimi, F.; Zorba, N. Drones for Sheep Livestock Monitoring. In Proceedings of the 20th IEEE Mediterranean Electrotechnical Conference (MELECON), Palermo, Italy, 16–18 June 2020; pp. 672–676. [Google Scholar] [CrossRef]
- Samanta, S.; Dutta, S.; Sengupta, S.; Banerjee, S.; Garika, N.K. Solar-Powered Drone for Detection of Soil Color. In Renewable Resources and Energy Management; CRC Press: Boca Raton, FL, USA, 2023; pp. 466–471. [Google Scholar] [CrossRef]
- Xu, Y.; Dan, Y.; Raymond, M.T. Production of Solar-Powered Quad-Copter for Agricultural Field Spraying. J. Phys. Conf. Ser. 2022, 2383, 012036. [Google Scholar] [CrossRef]
- Herwitz, S.R.; Johnson, L.F.; Arvesen, J.C.; Higgins, R.G.; Leung, J.G.; Dunagan, S.E. Precision Agriculture as a Commercial Application for Solar-Powered Unmanned Aerial Vehicles. In Proceedings of the 1st UAV Conference, Portsmouth, VA, USA, 20–23 May 2002. [Google Scholar] [CrossRef]
- Qi, G.; Zhao, G.; Xi, X. Soil Salinity Inversion of Winter Wheat Areas Based on Satellite-Unmanned Aerial Vehicle-Ground Collaborative System in Coastal of the Yellow River Delta. Sensors 2020, 20, 6521. [Google Scholar] [CrossRef]
- Patel, J.; Bhusnoor, M.; Patel, D.; Mehta, A.; Sainkar, S.; Mehendale, N. Unmanned Aerial Vehicle-Based Forest Fire Detection Systems: A Comprehensive Review. SSRN Electron. J. 2023. [Google Scholar] [CrossRef]
- Muksimova, S.; Umirzakova, S.; Mardieva, S.; Abdullaev, M.; Cho, Y.I. Revolutionizing Wildfire Detection Through UAV-Driven Fire Monitoring with a Transformer-Based Approach. Fire 2024, 7, 443. [Google Scholar] [CrossRef]
- Hossain, F.M.A.; Zhang, Y.M.; Tonima, M.A. Forest Fire Flame and Smoke Detection from UAV-Captured Images Using Fire-Specific Color Features and Multi-Color Space Local Binary Pattern. J. Unmanned Veh. Syst. 2020, 8, 285–309. [Google Scholar] [CrossRef]
- Sousa, M.J.; Moutinho, A.; Almeida, M. Classification of Potential Fire Outbreaks: A Fuzzy Modeling Approach Based on Thermal Images. Expert Syst. Appl. 2019, 129, 216–232. [Google Scholar] [CrossRef]
- Ramadan, M.N.A.; Basmaji, T.; Gad, A.; Hamdan, H.; Akgün, B.T.; Ali, M.A.H.; Alkhedher, M.; Ghazal, M. Towards Early Forest Fire Detection and Prevention Using AI-Powered Drones and the IoT. Internet Things 2024, 27, 101248. [Google Scholar] [CrossRef]
- Kinaneva, D.; Hristov, G.; Raychev, J.; Zahariev, P. Early Forest Fire Detection Using Drones and Artificial Intelligence. In Proceedings of the 2019 42nd International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 20–24 May 2019; pp. 1060–1065. [Google Scholar] [CrossRef]
- Hamza, D.; Zayed, M.; Aljaroodi, A.; Taha, K. Solar-Aided Early Forest-Fire Detection Drone. In Proceedings of the 2024 3rd International Conference on Sustainable Mobility Applications, Renewables and Technology (SMART), Dubai, United Arab Emirates, 22–24 November 2024. [Google Scholar] [CrossRef]
- Solar Powered Drones Assist Wildland Firefighters Wildfire. Available online: https://www.firehouse.com/ (accessed on 28 February 2025).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Battery Technology/Parameter | Li-Ion | LiPo | Ni-MH | NiCd | LA |
|---|---|---|---|---|---|
| Nominal cell voltage, V | 3.60–3.85 | 2.70–3.00 | 1.20 | 1.20 | 2.10 |
| Energy density, Wh/kg | 100–265 | 100–265 | 60–120 | 40–60 | 30–40 |
| Power density, W/kg | 250–340 | 245–430 | 250–1000 | 150 | 180 |
| Cycle life, cycles | 400–1200 | 500 | 180–2000 | 2000 | <1000 |
| Charge/discharge efficiency, % | 80–90 | 90 | 66–92 | 70–90 | 50–95 |
| Depth of discharge, % | 80 | 80 | 100 | 60–80 | 50 |
| Cost, USD/Wh | 0.94 | 2.31 | 0.85 | 2.68 | 0.70 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sornek, K.; Augustyn-Nadzieja, J.; Rosikoń, I.; Łopusiewicz, R.; Łopusiewicz, M. Status and Development Prospects of Solar-Powered Unmanned Aerial Vehicles—A Literature Review. Energies 2025, 18, 1924. https://doi.org/10.3390/en18081924
Sornek K, Augustyn-Nadzieja J, Rosikoń I, Łopusiewicz R, Łopusiewicz M. Status and Development Prospects of Solar-Powered Unmanned Aerial Vehicles—A Literature Review. Energies. 2025; 18(8):1924. https://doi.org/10.3390/en18081924
Chicago/Turabian StyleSornek, Krzysztof, Joanna Augustyn-Nadzieja, Izabella Rosikoń, Róża Łopusiewicz, and Marta Łopusiewicz. 2025. "Status and Development Prospects of Solar-Powered Unmanned Aerial Vehicles—A Literature Review" Energies 18, no. 8: 1924. https://doi.org/10.3390/en18081924
APA StyleSornek, K., Augustyn-Nadzieja, J., Rosikoń, I., Łopusiewicz, R., & Łopusiewicz, M. (2025). Status and Development Prospects of Solar-Powered Unmanned Aerial Vehicles—A Literature Review. Energies, 18(8), 1924. https://doi.org/10.3390/en18081924