
Model-Free Adaptive Fuzzy Sliding-Mode Observer Control for PMSM

Abstract
1. Introduction
- In the realm of model-free adaptive control (MFAC), the general rules for parameter adjustment are given. The four parameters of model-free adaptive control are adjusted online, and two improvement schemes are proposed, namely, enhancing the MFAC input signal to improve the universality of the control, and refining the pseudo-bias reset to mitigate interference caused by false resets.
- Fuzzy model-free adaptive control is applied to the observer of the permanent magnet synchronous motor; the fuzzy rule table is explicitly summarized to compensate for the superhelix observer’s error, addressing the problem of the error rate of change being too fast. This approach ensures accurate estimation of the back electromotive force. The process and reasons for parameter adjustments are given and explained in detail, providing a theoretical foundation for the application of fuzzy model-free adaptive control.
2. Fuzzy Model-Free Adaptive Sliding-Mode Observer
2.1. Traditional MFAC
2.2. Based on the Improved MFAC Algorithm
2.3. Parameter-Tuning Method of MFAC in Sliding-Mode Observer
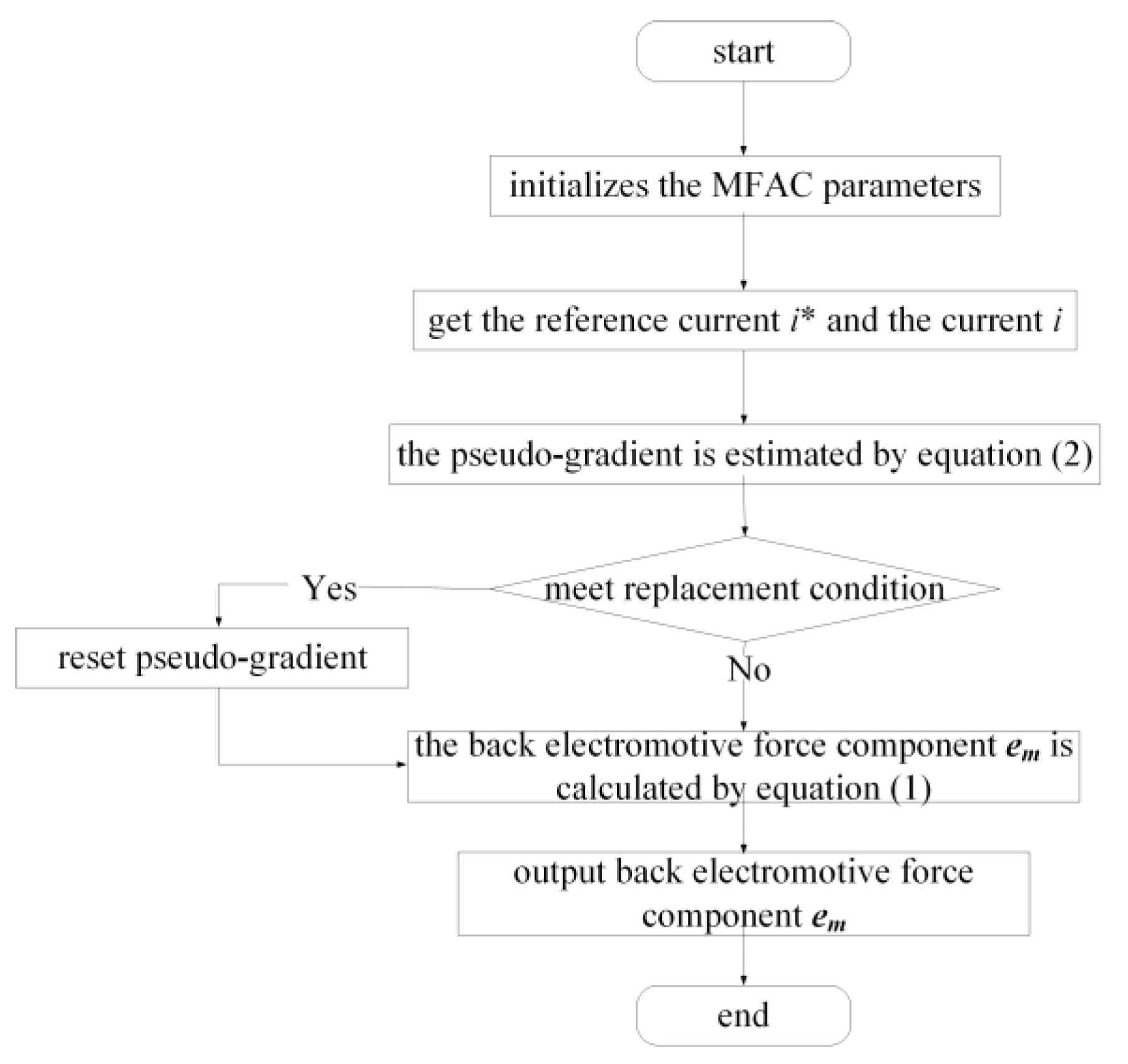
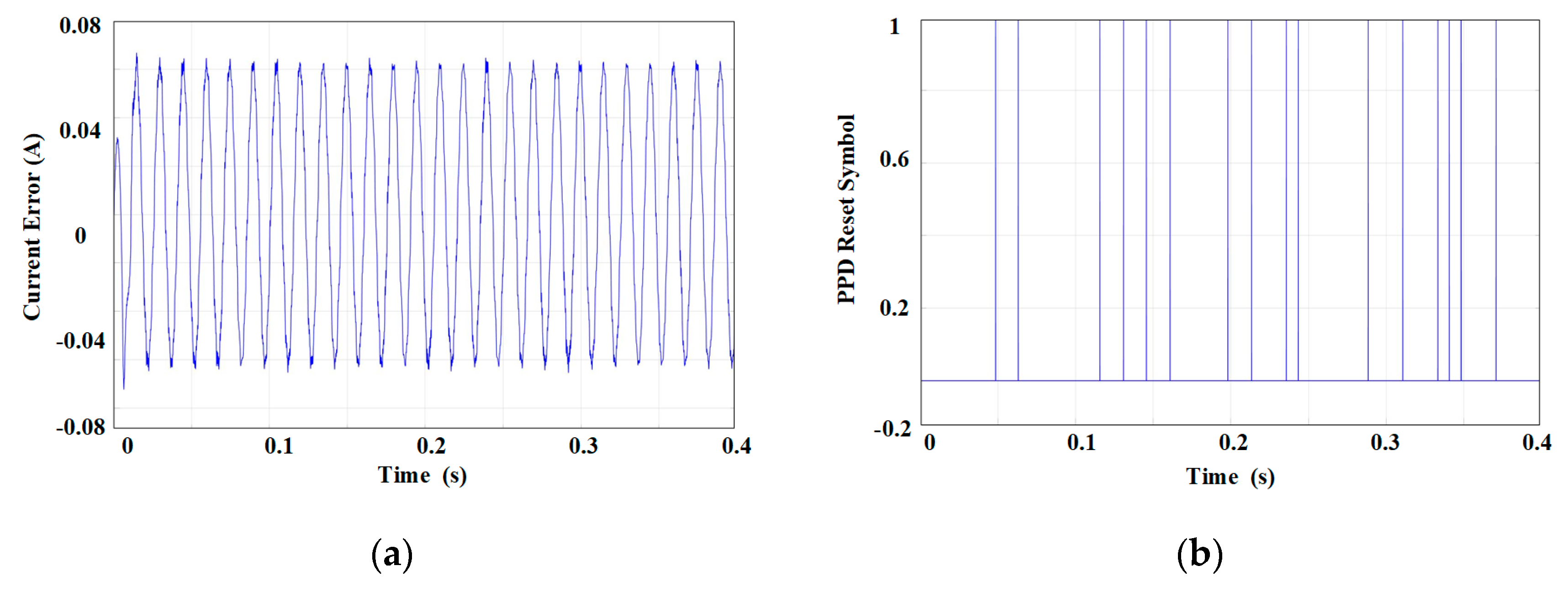
2.4. Based on the Improved PPD Reset Algorithm
2.5. Fuzzy Model-Free Adaptive Control
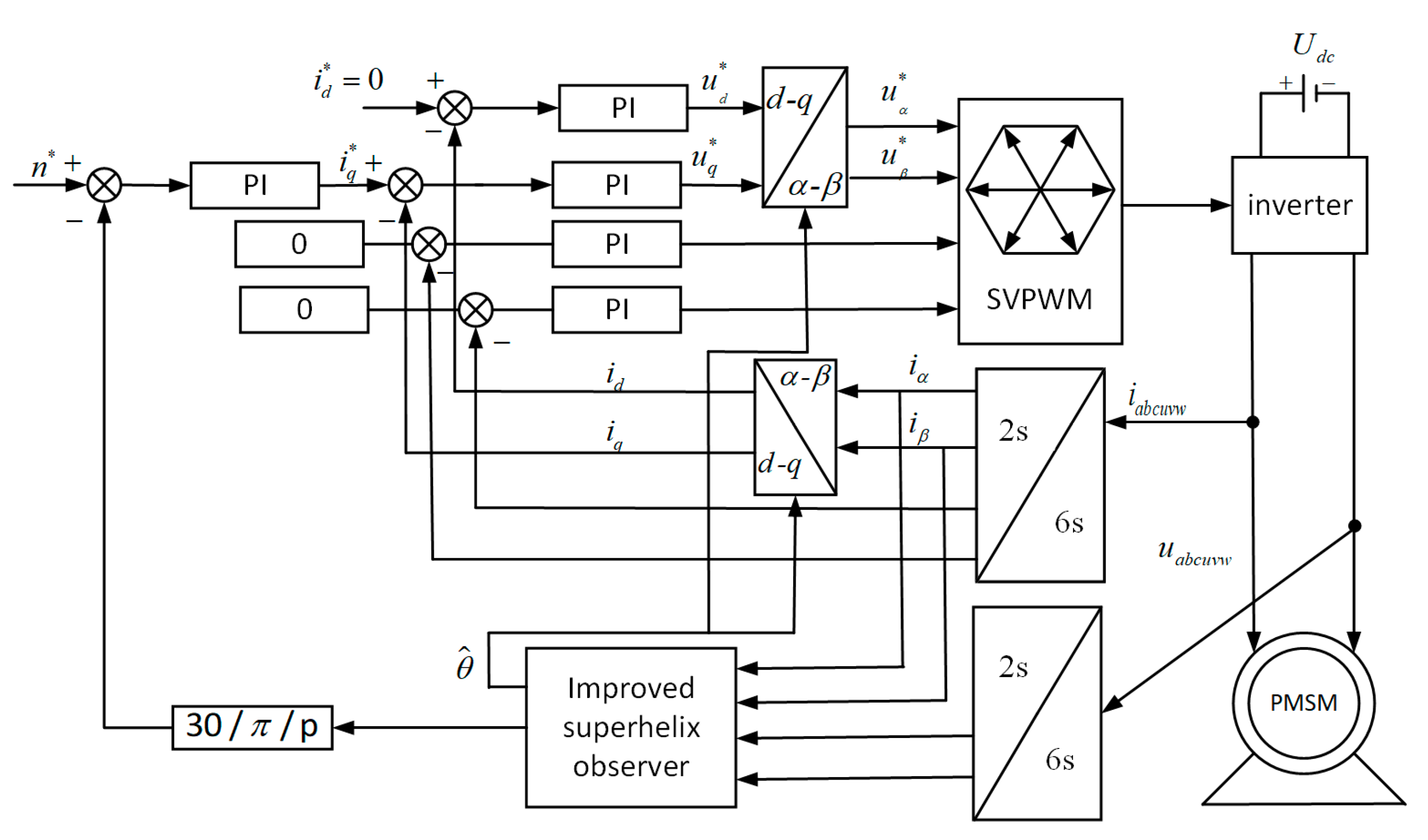
2.6. Design of an Improved Super-Twisting Observer
3. Results and Discussion
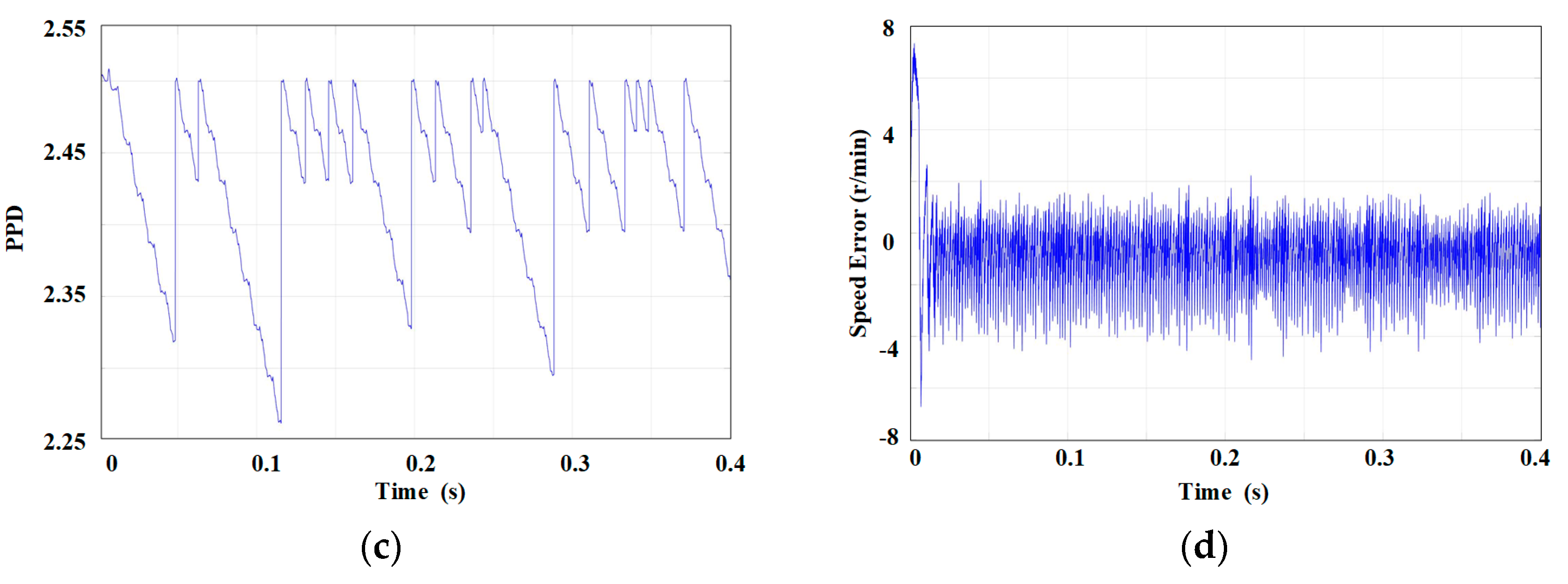
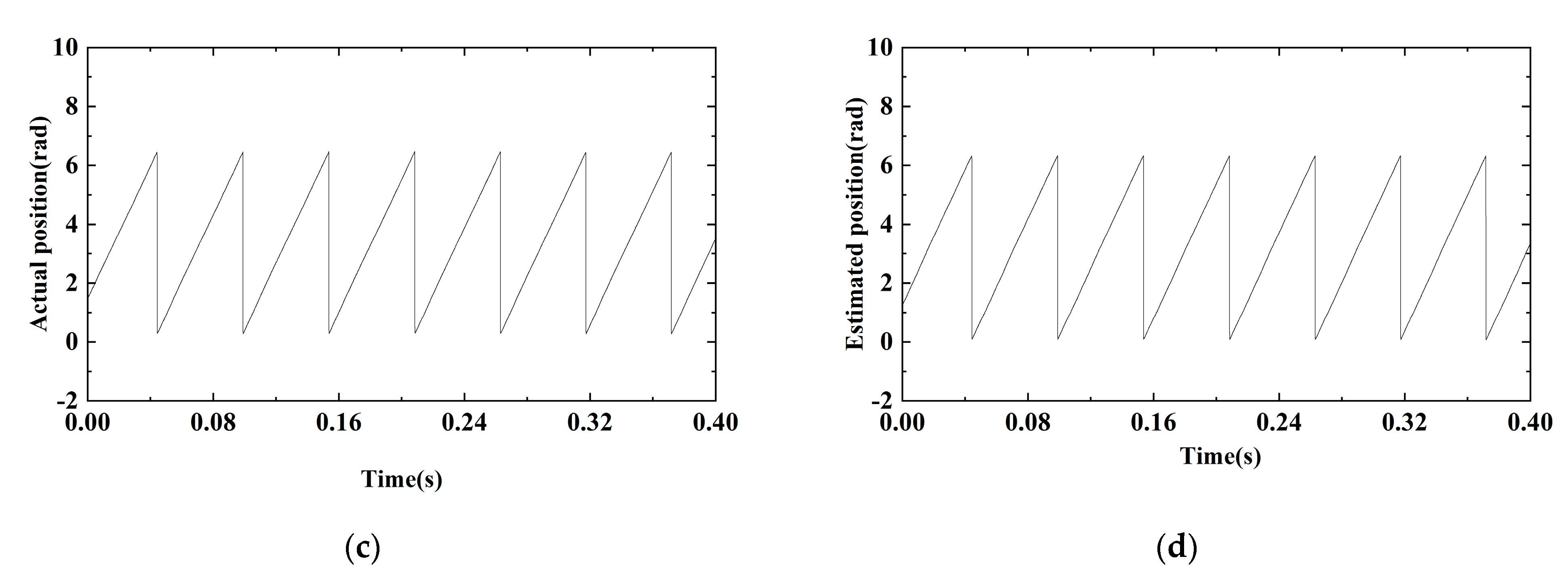
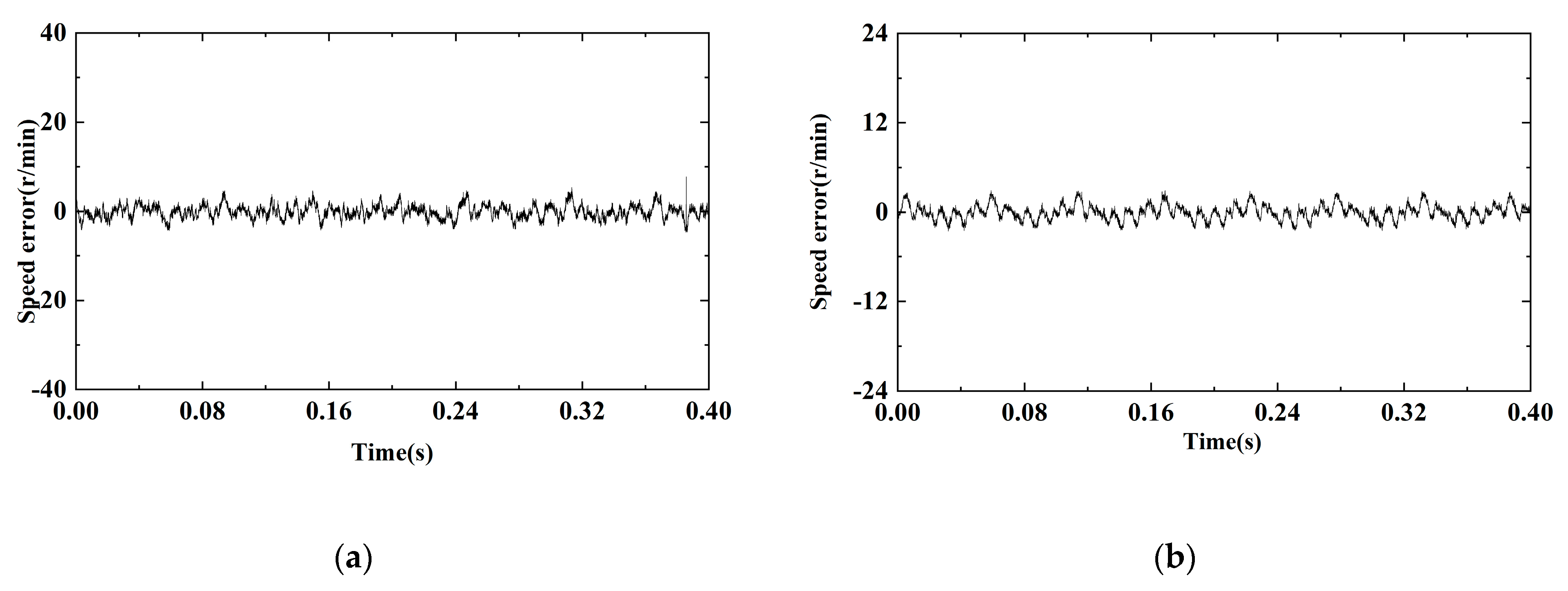
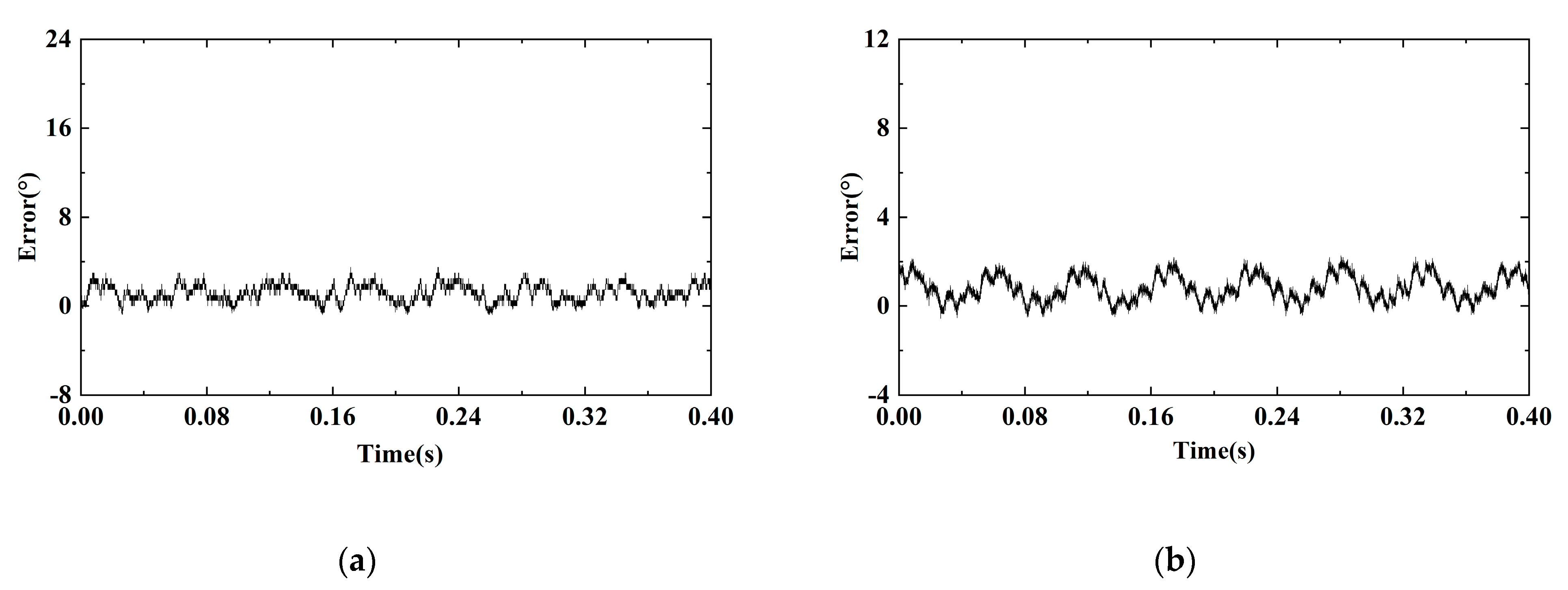
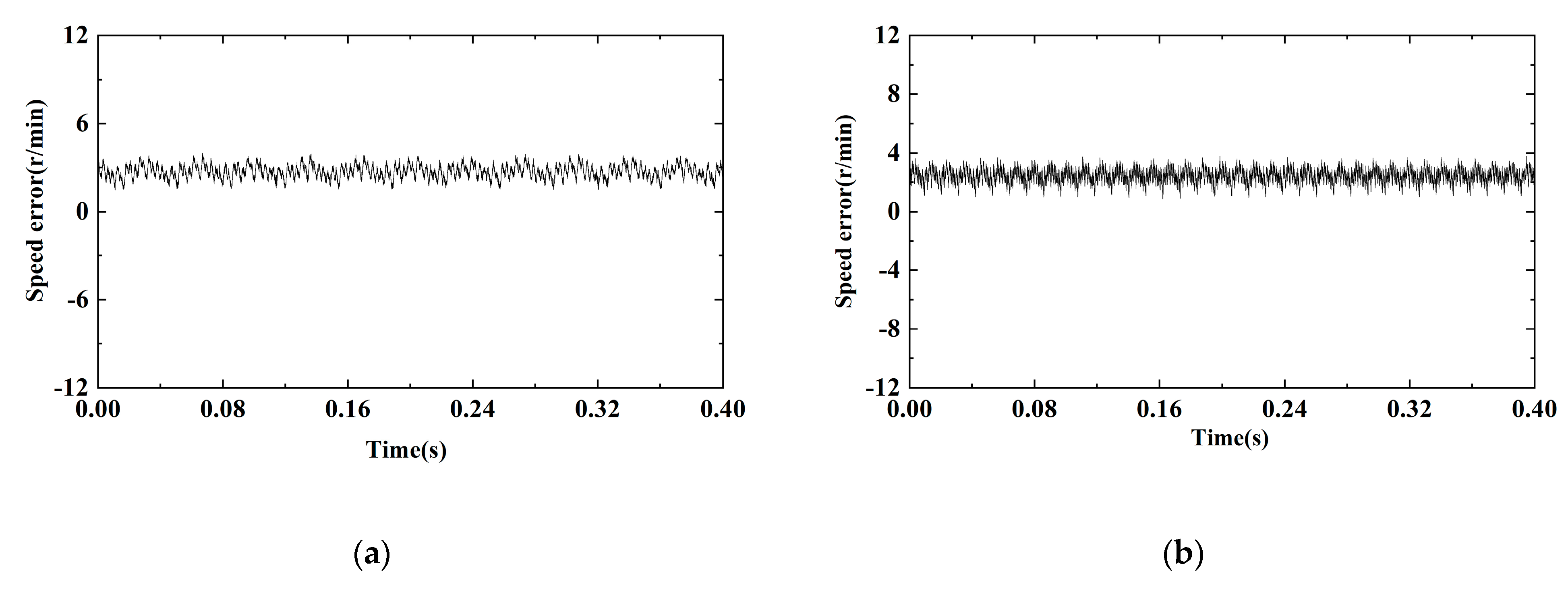
3.1. Simulation Verification
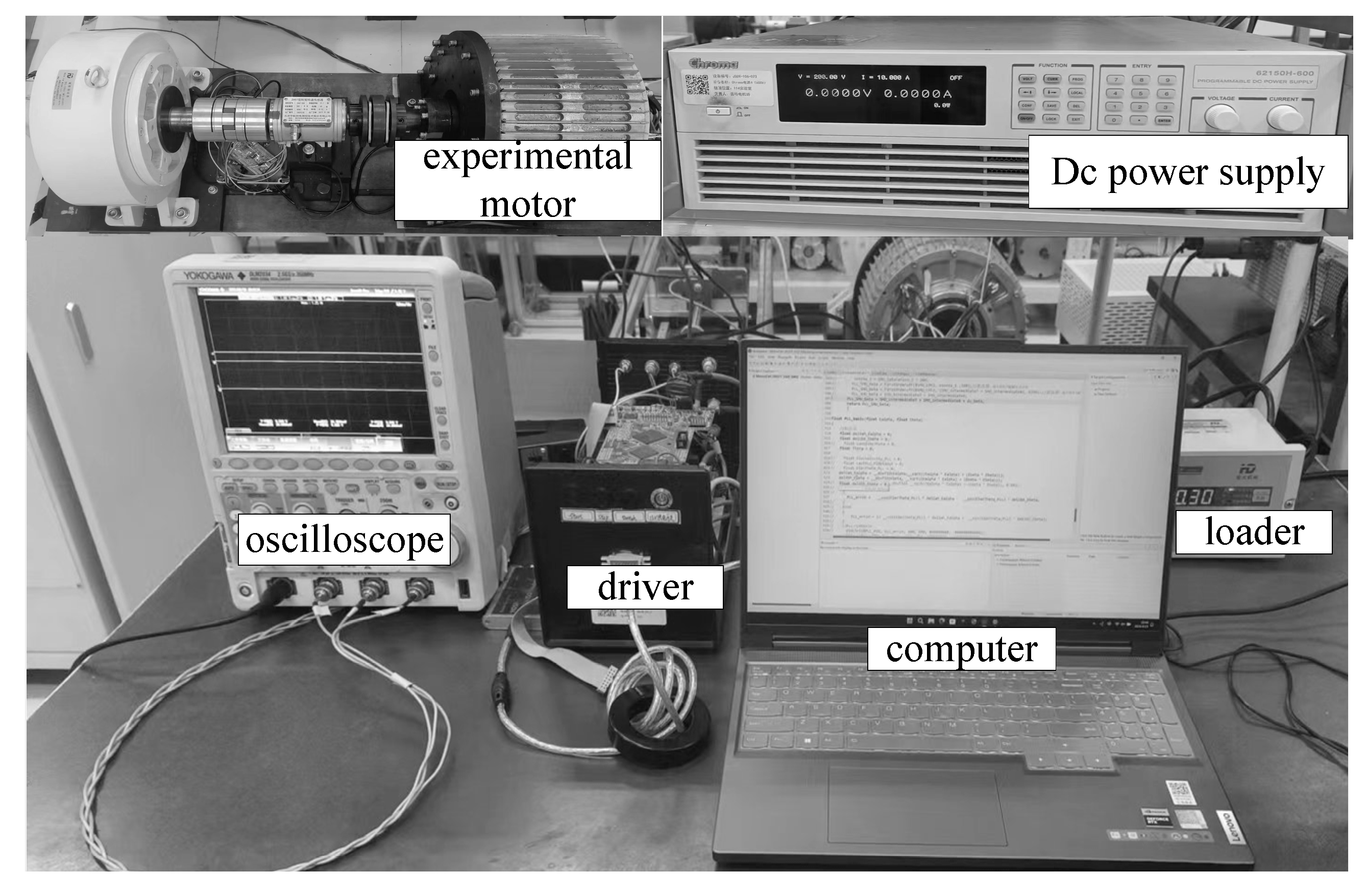
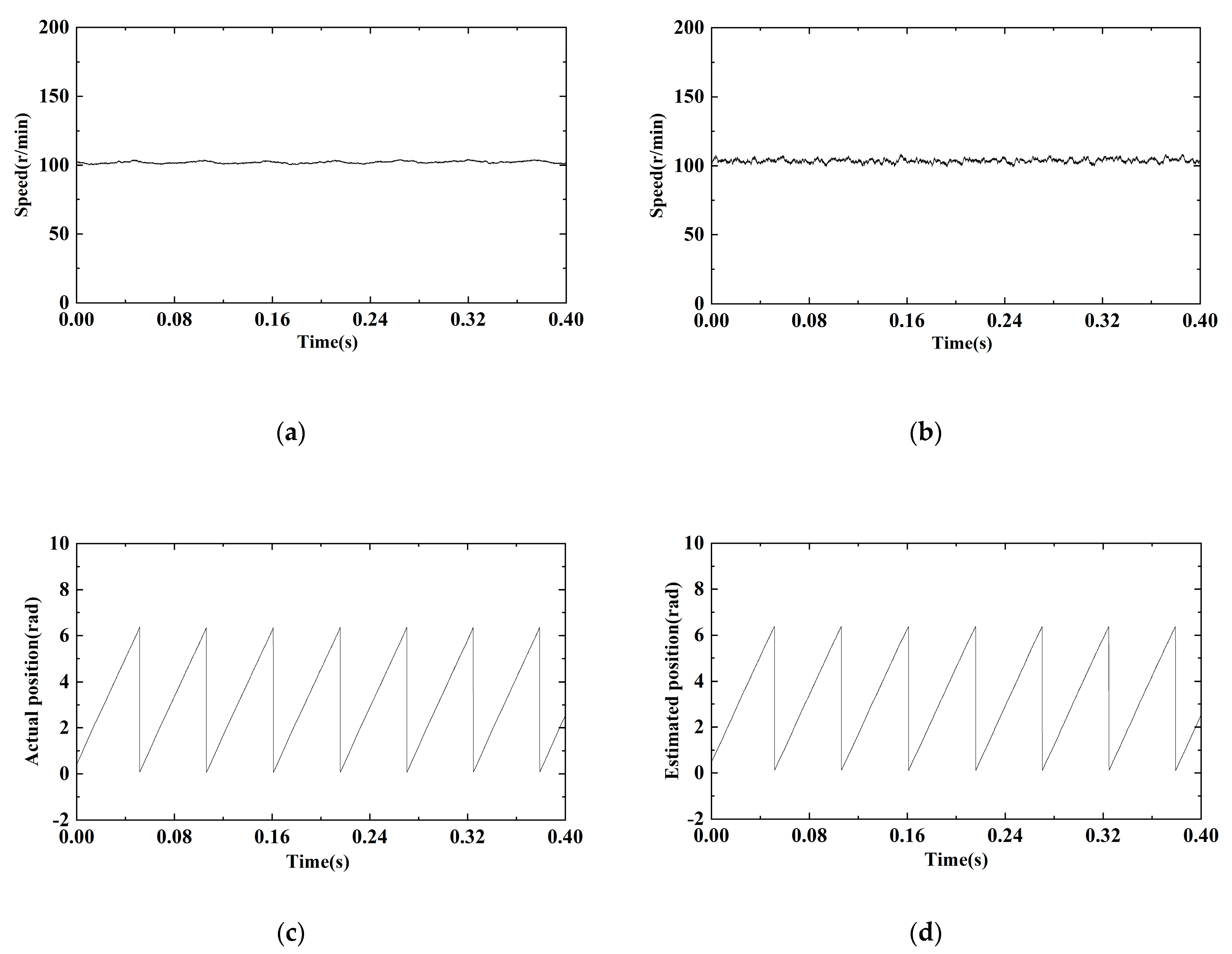
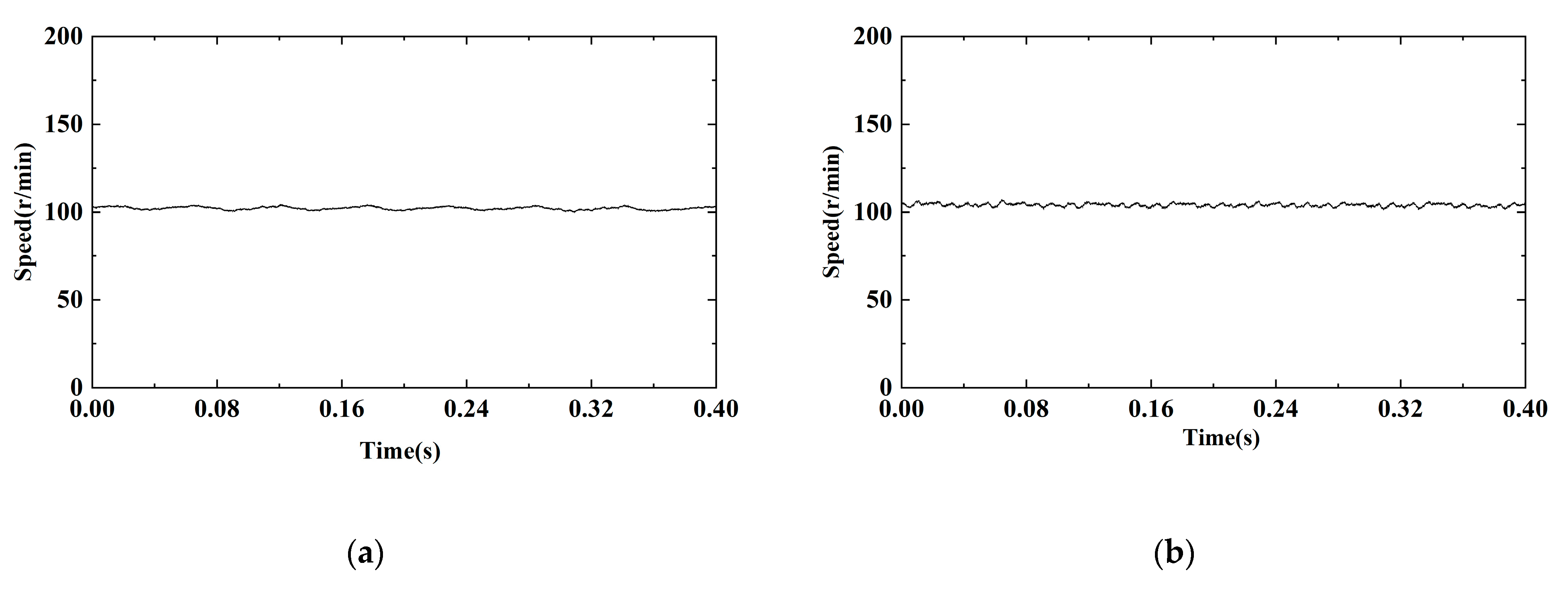
3.2. Experimental Verification
4. Conclusions
- Explore the principles of parameter adjustment to simplify the adjustment process.
- Utilize model-free adaptive predictive control to enhance the control effect and effectively address the inherent fuzziness of model-free adaptive predictive control systems.
- Further reduce the amplitude of parameter variation in model-free adaptive parameters for fuzzy systems to strengthen the control effect.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gaolin, W.; Maria, V.; Jorge, S. Position Sensorless Permanent Magnet Synchronous Machine Drives—A Review. IEEE Trans. Ind. Electron. 2020, 67, 5830–5842. [Google Scholar]
- Ding, H.; Zou, X.; Li, J. Sensorless Control Strategy of Permanent Magnet Synchronous Motor Based on Fuzzy Sliding Mode Observer. IEEE Access 2022, 10, 36743–36752. [Google Scholar] [CrossRef]
- Yuan, X.; Yang, Z.B.; Xun, L.J. Position Sensorless control strategy of permanent magnet synchronous motor based on improved sliding mode observer. Small Spec. Electr. Mach. 2022, 50, 47–52. [Google Scholar]
- Ton, N.; Trung, T.; Hoang, T. An Adaptive Backstepping Sliding-Mode Control for Improving Position Tracking of a Permanent-Magnet Synchronous Motor with a Nonlinear Disturbance Observer. IEEE Access 2023, 11, 19173–19185. [Google Scholar]
- Sun, Q.G.; Zhu, X.L.; Nin, F. Position Sensorless Control of Permanent Magnet Synchronous Motor Based on Improved Integral Sliding Mode Observer. In Proceedings of the 2024 IEEE PES 16th Asia-Pacific Power and Energy Engineering Conference (APPEEC), Nanjing, China, 25–27 October 2024; Volume 48, pp. 3269–3278. [Google Scholar]
- Mei, S.G.; Lu, W.Z.; Fan, Q.G. Position Sensorless Control Strategy for Permanent Magnet Synchronous Motors Based on Sliding Mode Observer Error Compensation. Trans. China Electrotech. Soc. 2023, 38, 398–408. [Google Scholar]
- Wang, J.; Zhou, L.; Su, M.X. Sensorless control of adaptive super spiral sliding mode observer based on fuzzy control. J. Electr. Eng. 2023, 18, 32–42. [Google Scholar]
- Kang, E.J.; Chen, J. Improved sliding mode sensorless control of permanent magnet synchronous motor. Electr. Mach. Control 2022, 10, 88–97. [Google Scholar]
- Shi, Q.G.; Zhu, J.J.; Han, Y. Load torque identification of permanent magnet synchronous motor based on adaptive sliding mode observer. Trans. China Electrotech. Soc. 2025, 1–15. [Google Scholar]
- Zhang, Y.H.; Cai, Q.L.; Cui, W.T. Sensorless Control of Permanent Magnet Synchronous Motor Using a New-type Sliding Mode Observer. Electr. Eng. 2024, 21, 94–97. [Google Scholar]
- Xu, W.; Jia, H.P. Sensorless Control of Permanent Magnet Synchronous Motor Based on Improved Sliding-Mode Observer. Electron. Packag. 2024, 24, 123–128. [Google Scholar]
- Wang, L.; Wang, Y.A.; Wu, J.K. Research on Control of Improved Super-Spiral Sliding Mode Observer for Permanent Magnet Synchronous Motor. Electrotech. Electr. 2024, 8, 15–20+25. [Google Scholar]
- Yu, H.; Zhou, S.G.; Ma, F.H. Sensorless Control of PMSM Based on Fuzzy Full-order Sliding Mode Observer. Electr. Drive 2024, 54, 3–10. [Google Scholar]
- Wang, X.L.; Xu, Z.C. Research on PMSM Control Based on Improved Sliding Mode Observer. Ind. Control Comput. 2024, 37, 26–28. [Google Scholar]
- Abdülhamit, N.; Nihat, İ. Sensorless Vector Control for Induction Motor Drive at Very Low and Zero Speeds Based on an Adaptive-Gain Super-Twisting Sliding Mode Observer. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 4332–4339. [Google Scholar]
- Sun, X.L.; Zhou, L.; Tian, Y.A. Sensorless Control Based on Fuzzy Variable Coefficient Super Twisting Sliding Mode Observer. J. Power Supply 2025, 1–14. [Google Scholar]
- Kanat, S.; Ton, D. Design and Analysis of a Generalized High-Order Disturbance Observer for PMSMs With a Fuzy-PI Speed Controller. IEEE Access 2022, 10, 42252–42260. [Google Scholar]
- Zheng, R.; Zhang, J.X.; Dong, X.S. Permanent magnet synchronous motor BP neural network-intelligent PID sliding mode observation vector control algorithm. J. Detect. Control 2024, 46, 124–131. [Google Scholar]
- Wu, X.H.; Liu, Y.T.; Chen, H.L. Recurrent Neural Network-Based Model Predictive Control for Speed Regulation in Permanent Magnet Synchronous Motors with an Extended Sliding Mode Load Torque Observer. In Proceedings of the 2024 IEEE 7th International Electrical and Energy Conference (CIEEC), Harbin, China, 10–12 May 2024; pp. 3689–3694. [Google Scholar]
- Shilpa, Y.; Anurodh, K.; Amit, V. Torque Estimation of Permanent Magnet Synchronous Motor (PMSM) Using 1D Convolutional Neural Network. In Proceedings of the 2022 IEEE 6th Conference on Information and Communication Technology (CICT), Gwalior, India, 18–20 November 2022; pp. 1–5. [Google Scholar]
- Lin, X.P.; Xu, R.Q.; Yao, W.R. Observer-Based Prescribed Performance Speed Control for PMSMs: A Data-Driven RBF Neural Network Approach. IEEE Trans. Ind. Inform. 2024, 20, 7502–7512. [Google Scholar]
- Jiang, Y.; Gao, W.N.; Wu, Q. Reinforcement learning and cooperative H∞ output regulation of linear continuous-time multi-agent systems. Automatica 2023, 148, 110768. [Google Scholar]
- Shi, H.Y.; Gao, W.; Jiang, X.Y. Two-dimensional model-free Q-learning-based output feedback fault-tolerant control for batch processes. Comput. Chem. Eng. 2024, 184, 108583. [Google Scholar]
- Zhang, X.J.; Bujarbaruah, M.; Borrelli, F. Near-Optimal Rapid MPC Using Neural Networks: A Primal-Dual Policy Learning Framework. IEEE Trans. Control Syst. Technol. 2021, 29, 2102–2114. [Google Scholar]
- Farzanegan, B.; Moghadam, R.; Jagannathan, S. Optimal Adaptive Tracking Control of Partially Uncertain Nonlinear Discrete-Time Systems Using Lifelong Hybrid Learning. IEEE Trans. Neural Netw. Learn. Syst. 2024, 35, 17254–17265. [Google Scholar] [PubMed]
- Tesfazgi, S.; Sprandl, L.; Lederer, A. Stable Inverse Reinforcement Learning: Policies from Control Lyapunov Landscapes. IEEE Open J. Control Syst. 2024, 3, 358–374. [Google Scholar]
- Wang, S.D.; Dragicevic, T.; Gontijo, G.F.; Chaudhary, S.K. Machine Learning Emulation of Model Predictive Control for Modular Multilevel Converters. IEEE Trans. Ind. Electron. 2021, 68, 11628–11634. [Google Scholar]
- Grelewicz, P.; Khuat, T.T.; Czeczot, J. Application of Machine Learning to Performance Assessment for a Class of PID-Based Control Systems. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 4226–4238. [Google Scholar] [CrossRef]
- Ho, M.C.; Lim, J.M.; Chong, C.Y. High-Dimensional Origin Destination Calibration Using Metamodel Assisted Simultaneous Perturbation Stochastic Approximation. IEEE Trans. Intell. Transp. Syst. 2023, 24, 3845–3854. [Google Scholar]
- Feng, Z.X.; Ren, Q.C.; Reng, Y.P. Optimizing the Parameters of MFAC Based on the Simplex Method. Control Eng. China 2016, 23, 405–410. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| e | ec | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PB | PM | PS | ZO | PM | PB | PB |
| NM | PM | PS | ZO | NS | PS | PM | PB |
| NS | PS | ZO | NS | NM | ZO | PS | PM |
| ZO | ZO | NS | NM | NB | NM | NS | ZO |
| PS | PB | PS | ZO | NM | NS | ZO | PS |
| PM | PB | PM | PS | NS | ZO | PS | PM |
| PB | PB | PB | PM | ZO | PS | PM | PB |
| e | ec | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | NB | NM | NM | NS | ZO | PS | PM |
| NM | NB | NM | NM | NS | ZO | PS | PM |
| NS | NB | NM | NS | ZO | PS | PM | PM |
| ZO | NM | NM | NS | ZO | PS | PM | PM |
| PS | NM | NM | NS | ZO | PM | PM | PB |
| PM | NM | NS | ZO | PM | PM | PB | PB |
| PB | NM | NS | PS | PM | PM | PB | PB |
| e | ec | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | NB | NM | NS | ZO | NM | NB | NB |
| NM | NM | NS | ZO | PS | NS | NM | NB |
| NS | NS | ZO | PS | PM | ZO | NS | NM |
| ZO | ZO | PS | PM | PB | PM | PS | ZO |
| PS | NB | NS | ZO | PM | PS | ZO | NS |
| PM | NB | NM | NS | PS | ZO | NS | NM |
| PB | NB | NB | NM | ZO | NS | NM | NB |
| Parameter Name | Value |
|---|---|
| Number of poles | 11 |
| Stator resistance/Ω | 0.92 |
| dq-axis inductance/mH | 15.21 |
| Rotor flux linkage/Wb | 0.88 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, B.; Zhu, D.; Tao, T. Model-Free Adaptive Fuzzy Sliding-Mode Observer Control for PMSM. Energies 2025, 18, 1877. https://doi.org/10.3390/en18081877
Zhu B, Zhu D, Tao T. Model-Free Adaptive Fuzzy Sliding-Mode Observer Control for PMSM. Energies. 2025; 18(8):1877. https://doi.org/10.3390/en18081877
Chicago/Turabian StyleZhu, Boming, Dehong Zhu, and Tao Tao. 2025. "Model-Free Adaptive Fuzzy Sliding-Mode Observer Control for PMSM" Energies 18, no. 8: 1877. https://doi.org/10.3390/en18081877
APA StyleZhu, B., Zhu, D., & Tao, T. (2025). Model-Free Adaptive Fuzzy Sliding-Mode Observer Control for PMSM. Energies, 18(8), 1877. https://doi.org/10.3390/en18081877