

Numerical Simulation of the Input-Output Behavior of a Geothermal Energy Storage

Abstract
1. Introduction
Our Contribution
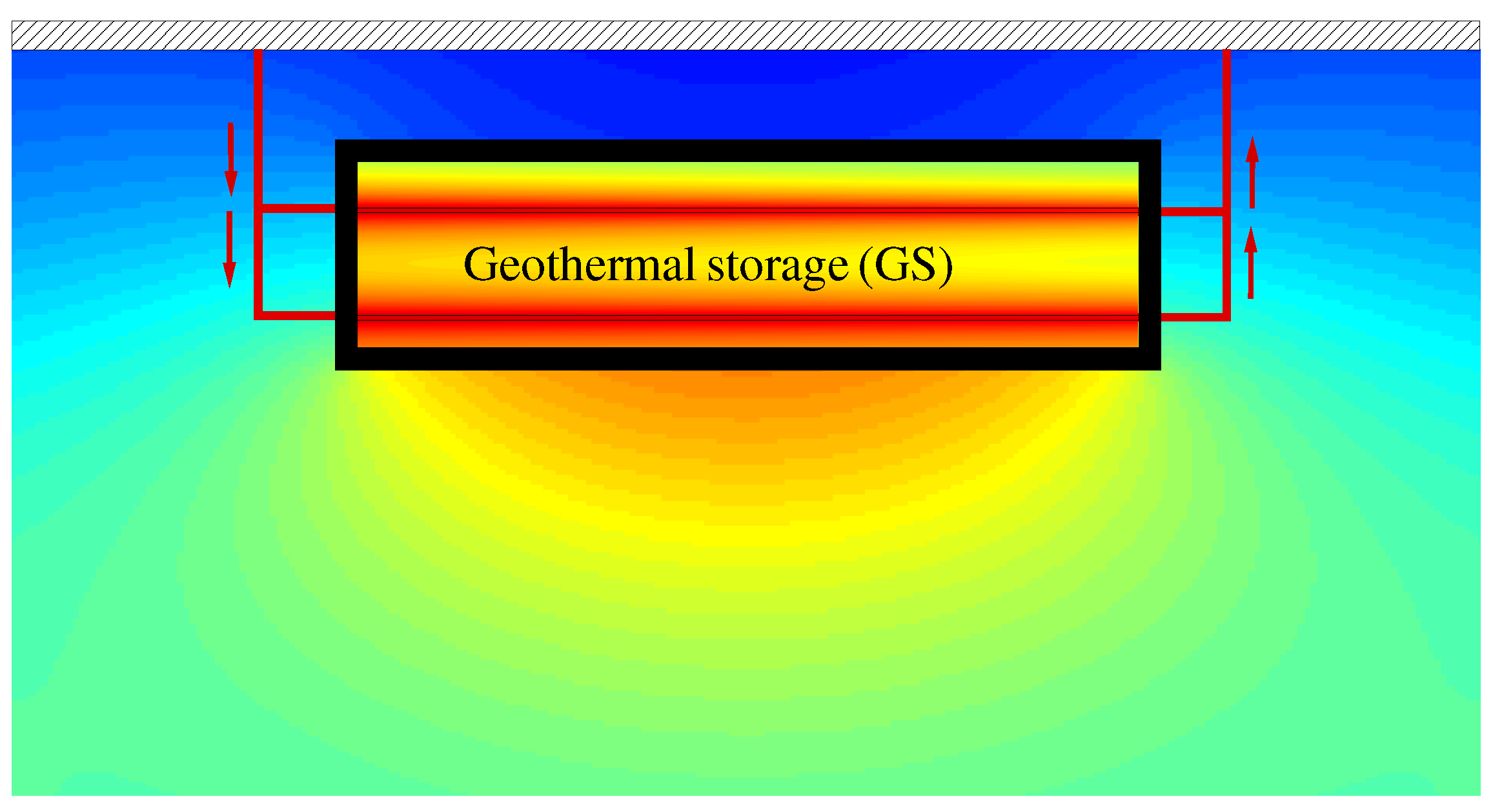
2. Dynamics of Spatial Temperature Distribution in a Geothermal Storage
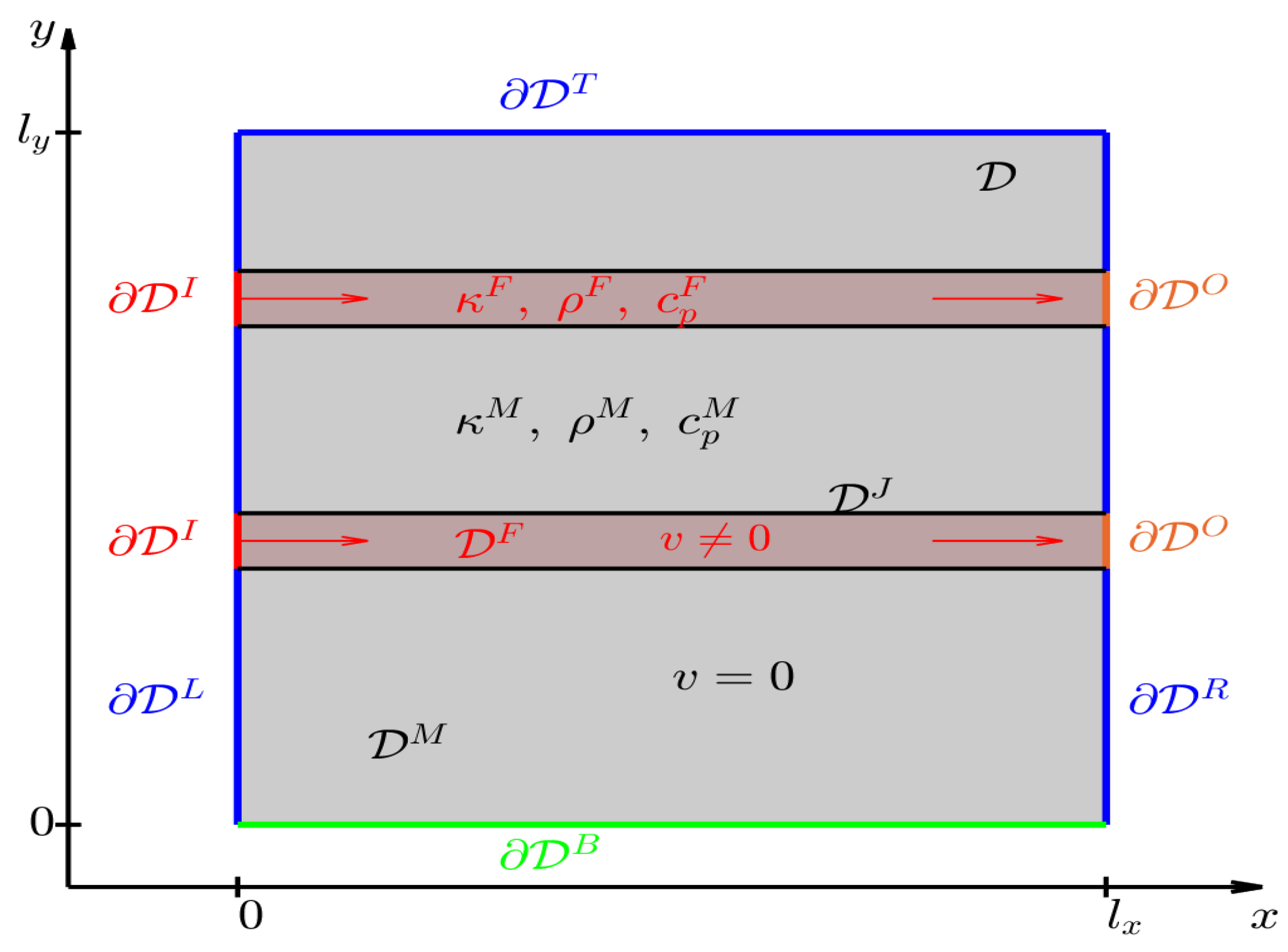
2.1. Two-Dimensional Model
- 1.
- Material parameters of the medium in the domain and of the fluid in the domain are constants.
- 2.
- Fluid velocity is piecewise constant, that is,
- 3.
- Perfect contact at the interface between fluid and medium.
Heat Equation
2.2. Boundary and Interface Conditions
- Homogeneous Neumann condition describing perfect insulation on the top and the side, see Equation (3):where , and and denotes the outer-pointing normal vector.
- Robin condition describing heat transfer on the bottom, as in Equation (4):with , where denotes the heat transfer coefficient and the underground temperature.
- Mixed boundary conditions at the inlet: Here one has to distinguish three cases.
- (i)
- Charging: The pump is on (), the fluid arrives at the storage with the inlet temperature which is a given constant, and we can impose a Dirichlet boundary condition.
- (ii)
- Waiting: The pump is off (), and we set a homogeneous Neumann condition describing perfect insulation.
- (iii)
- Discharging: In this mode, the pump is switched on () and the operation of the heat pump must be taken into account. The heat pump transfers the heat from the storage tank to the building’s heating system. It is connected to two circuits in which moving fluids carry heat. A first circuit is connected to the geothermal storage. The fluid from the PHX outlet arrives at the inlet of the heat pump with the temperature . Here, denotes average temperature at the PHX outlet at time t. It is one of the aggregated characteristics which are explained in more detail below, see Equation (22). The heat pump withdraws heat from the fluid so that it leaves the pump at time t at the temperature , and returns to the inlet of the geothermal storage. The quantity is called heat pump spread and assumed to be a given constant. The thermal energy extracted from the fluid in the first circuit is then transferred to the fluid in the second circuit, which is connected to the building’s heating system. Here, the temperature is also raised to a level suitable for the heating system by converting electrical energy into thermal energy.Mathematically, this leads to a coupling condition which links the inlet temperature to the average temperature at the PHX outlet via .Summarizing, we obtain Equation (5):
- “Do Nothing” condition at the outlet in the following sense. If the pump is on (), then the total heat flux directed outwards can be decomposed into a diffusive heat flux given by and a convective heat flux given by . Since the model parameters in real-world applications are such that the convective heat flux is much larger than the first, see for example below in Table 1, we neglect the diffusive heat flux. This leads to a homogeneous Neumann condition, expressed by Equation (6)If the pump is off, then we assume (as already for the inlet) perfect insulation, which is also described by the above condition.
- Smooth heat flux at interface between fluid and soil leading to a coupling condition given by Equation (7):Here, denote the temperature of the fluid inside the PHX and of the soil outside the PHX, respectively. Moreover, it is assumed that the contact between the PHX and the medium is perfect which leads to a smooth transition of the temperature given by Equation (8).
3. Discretization of the Heat Equation
3.1. Semidiscretization of the Heat Equation
- 1.
- There are straight horizontal PHXs, the fluid moves in positive x-direction.
- 2.
- The interior of the PHXs contains grid points.
- 3.
- Each interface between medium and fluid contains grid points.
3.2. Full Discretization
4. Aggregated Characteristics
4.1. Aggregated Characteristics Related to the Amount of Stored Energy
4.2. Aggregated Characteristics Related to the Heat Flux at the Boundary
4.3. Energy Balance
4.4. Computation of Aggregated Characteristics
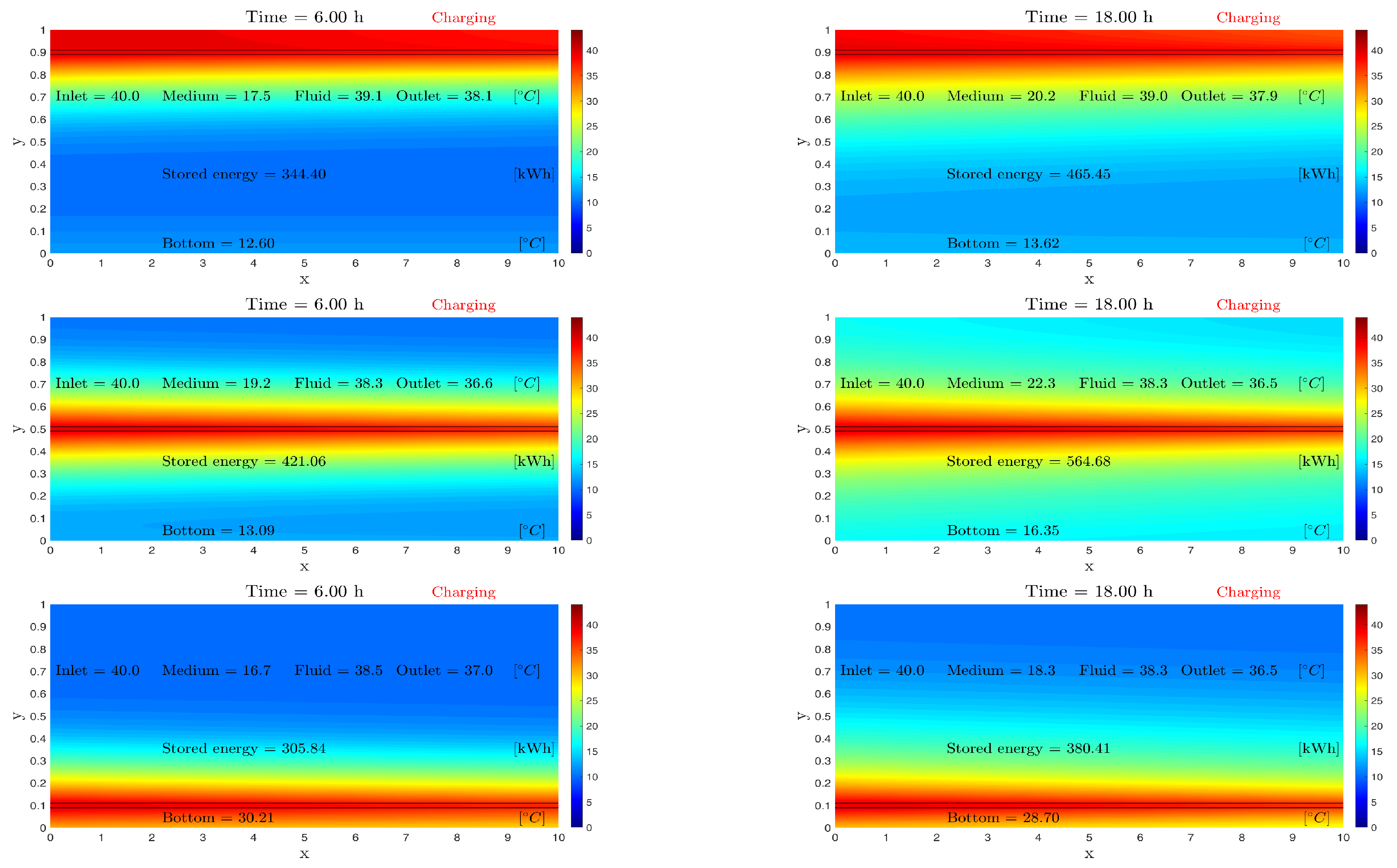
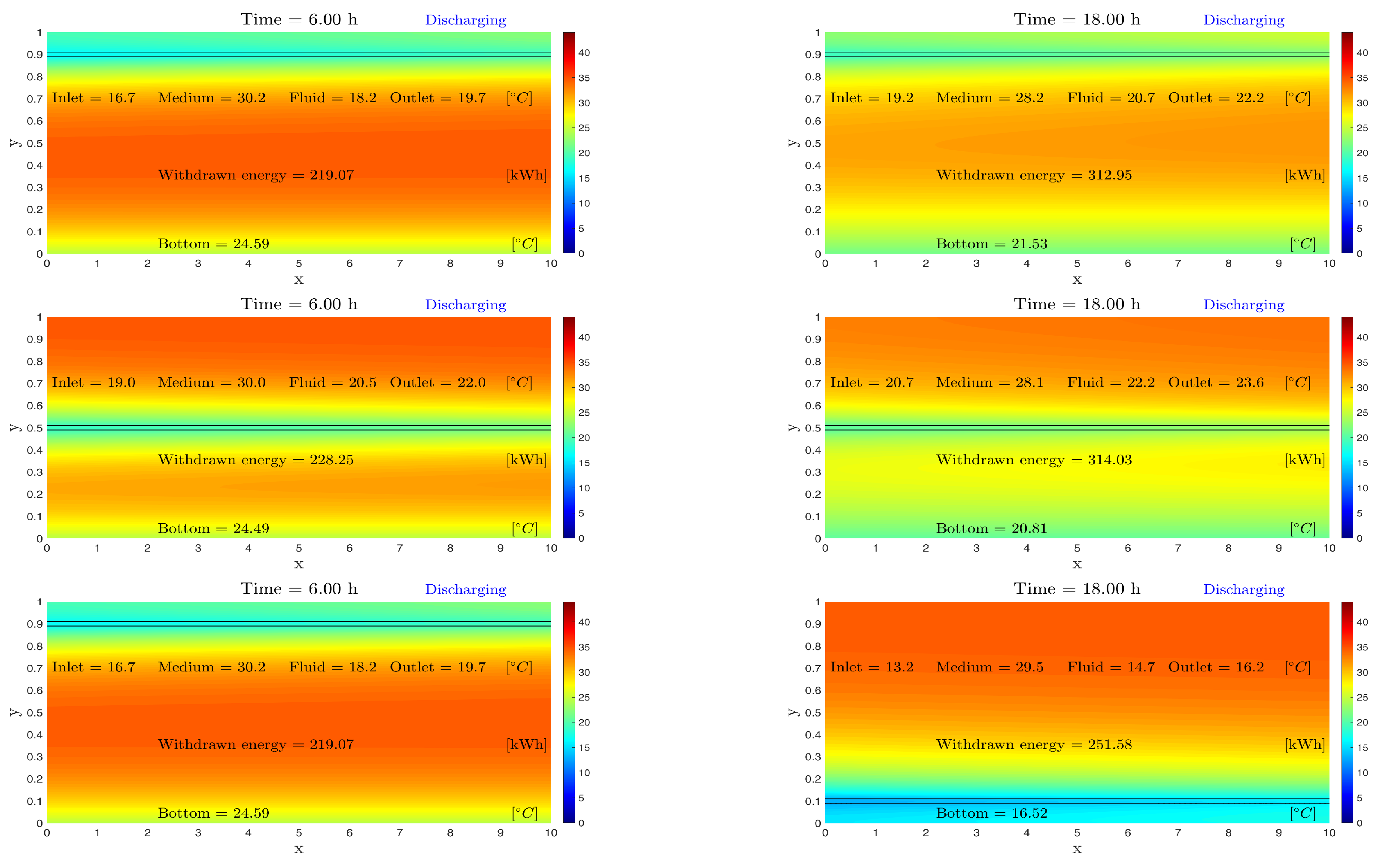
5. Numerical Results
5.1. Settings for Numerical Simulation
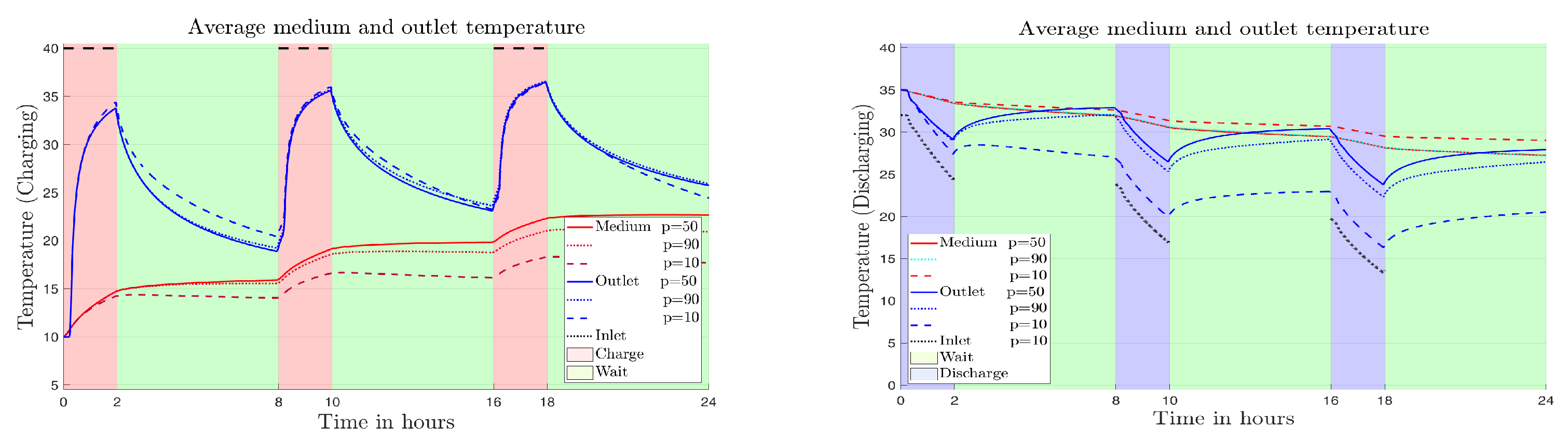
5.2. Storage with One Horizontal Straight PHX for 24 h
5.3. Numerical Results for 48 h
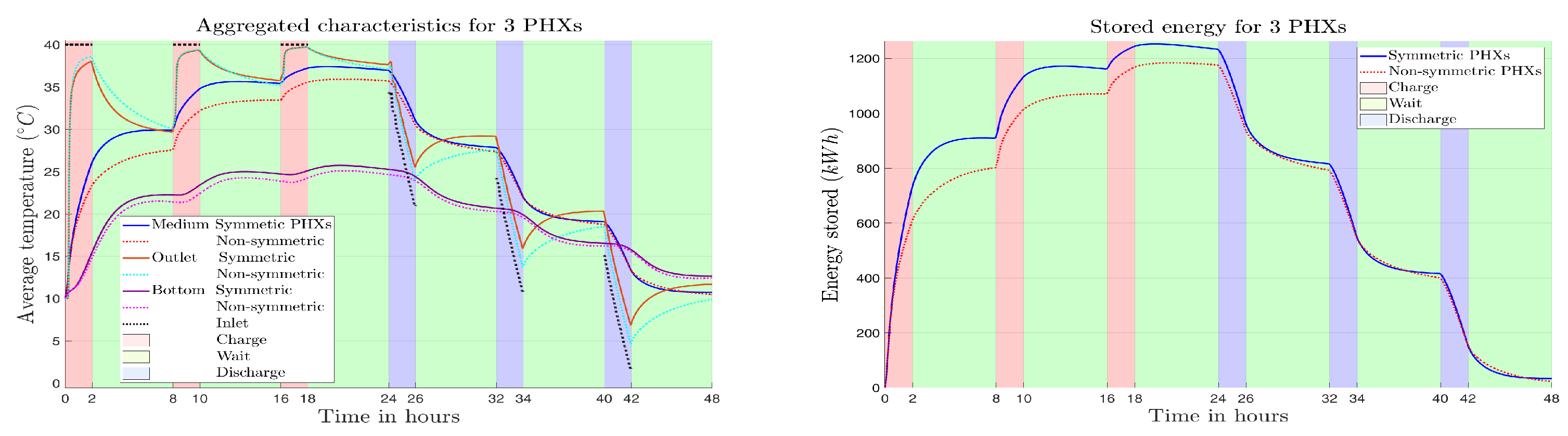
5.3.1. Storage with Three Horizontal Straight PHXs
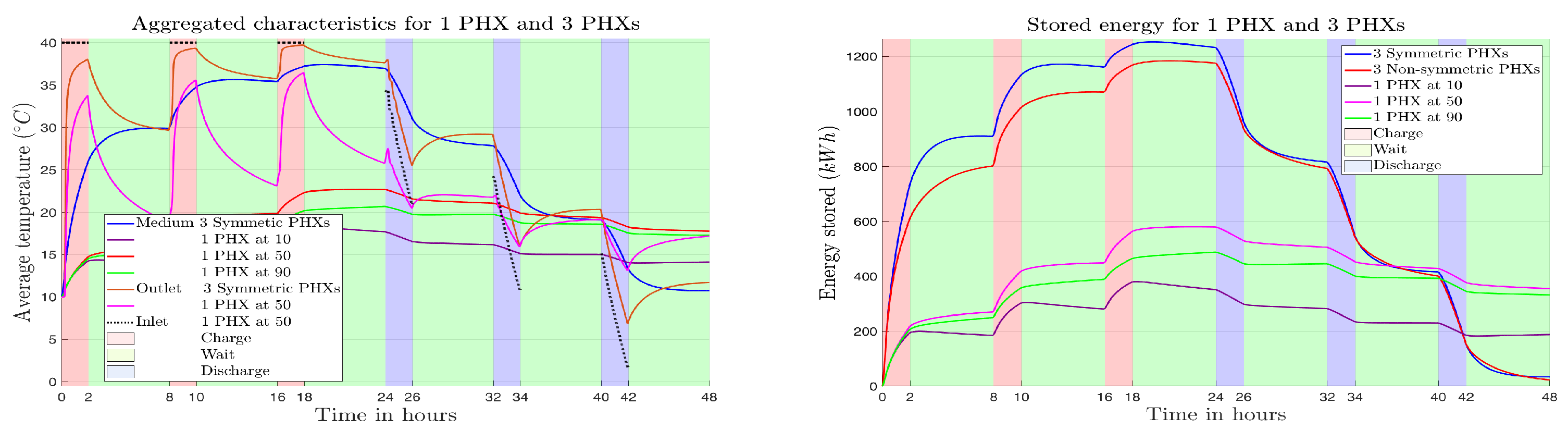
5.3.2. Comparison with One Horizontal Straight PHX
6. Summary and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Notation
| temperature in the geothermal storage | |
| finite time horizon | |
| , , | width, height and depth of the storage |
| domain of the geothermal storage | |
| domain of medium (soil) and PHX fluid | |
| interface between the PHXs and the medium | |
| boundary of the domain | |
| , | inlet and outlet boundaries of the PHX |
| , | left, right, top and bottom boundaries of the domain |
| subsets of index pairs for grid points | |
| mappings of index pairs to single indices | |
| time-dependent velocity vector, | |
| constant velocity during pumping | |
| , | specific heat capacity of the fluid and medium |
| , | mass density of the fluid and medium |
| , | thermal conductivity of the fluid and medium |
| , | thermal diffusivity of the fluid and medium |
| heat transfer coefficient between storage and underground | |
| initial temperature distribution of the geothermal storage | |
| underground temperature | |
| inlet temperature of the PHX, during charging and discharging, | |
| heat pump spread | |
| average temperature in the storage medium, fluid and whole storage | |
| average temperature at the outlet and bottom boundary | |
| gain of thermal energy in a certain subdomain | |
| , | number of grid points in and -direction |
| , | step size in x and y-direction and the time step |
| outward normal to the boundary | |
| n | dimension of vector Y |
| number of PHXs | |
| identity matrix | |
| A | dimensional system matrix |
| dimensional input matrix | |
| block matrices of matrix A | |
| Y | vector of temperatures at grid points |
| g | input variable of the system |
| ∇, | gradient, Laplace operator |
| PHX | pipe heat exchanger |
Appendix A. Numerical Approximation of Aggregated Characteristics
Appendix A.1. Numerical Approximation of , , and
Appendix A.2. Numerical Approximation of and
Appendix A.3. Derivation of Quadrature Formula (uid68)
References
- Guelpa, E.; Verda, V. Thermal energy storage in district heating and cooling systems: A review. Appl. Energy 2019, 252, 113474. [Google Scholar]
- Kitapbayev, Y.; Moriarty, J.; Mancarella, P. Stochastic control and real options valuation of thermal storage-enabled demand response from flexible district energy systems. Appl. Energy 2015, 137, 823–831. [Google Scholar]
- Mahmoud, M.; Ramadan, M.; Naher, S.; Pullen, K.; Baroutaji, A.; Olabi, A.G. Recent advances in district energy systems: A review. Therm. Sci. Eng. Prog. 2020, 20, 100678. [Google Scholar] [CrossRef]
- Dahash, A.; Ochs, F.; Tosatto, A.; Streicher, W. Toward efficient numerical modeling and analysis of large-scale thermal energy storage for renewable district heating. Appl. Energy 2020, 279, 115840. [Google Scholar] [CrossRef]
- Major, M.; Poulsen, S.E.; Balling, N. A numerical investigation of combined heat storage and extraction in deep geothermal reservoirs. Geotherm. Energy 2018, 6, 1. [Google Scholar] [CrossRef]
- Regnier, G.; Salinas, P.; Jacquemyn, C.; Jackson, M. Numerical simulation of aquifer thermal energy storage using surface-based geologic modelling and dynamic mesh optimisation. Hydrogeol. J. 2022, 30, 1179–1198. [Google Scholar] [CrossRef]
- Dincer, I.; Rosen, M.A. Thermal Energy Storage: Systems and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2021. [Google Scholar]
- Soltani, M.; Moradi Kashkooli, F.; Dehghani-Sanij, A.; Nokhosteen, A.; Ahmadi-Joughi, A.; Gharali, K.; Mahbaz, S.; Dusseault, M. A comprehensive review of geothermal energy evolution and development. Int. J. Green Energy 2019, 16, 971–1009. [Google Scholar]
- Bähr, M.; Breuß, M. Efficient Long-Term Simulation of the Heat Equation with Application in Geothermal Energy Storage. Mathematics 2022, 10, 2309. [Google Scholar] [CrossRef]
- Takam, P.H.; Wunderlich, R.; Pamen, O.M. Modeling and simulation of the input–output behavior of a geothermal energy storage. Math. Methods Appl. Sci. 2024, 47, 371–396. [Google Scholar] [CrossRef]
- Takam, P.H.; Wunderlich, R. Model order reduction for the input–output behavior of a geothermal energy storage. J. Eng. Math. 2024, 148, 12. [Google Scholar] [CrossRef]
- Welty, J.; Rorrer, G.L.; Foster, D.G. Fundamentals of Momentum, Heat and Mass Transfer; Wiley: Hoboken, NJ, USA, 2019. [Google Scholar]
- Takam, P.H.; Wunderlich, R. Cost-optimal management of a residential heating system with a geothermal energy storage under uncertainty. arXiv 2025, arXiv:2502.19619. [Google Scholar] [CrossRef]
- Duffy, D.J. Finite Difference Methods in Financial Engineering: A Partial Differential Equation Approach; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Units | Parameters | Values | Units | ||
|---|---|---|---|---|---|---|---|
| Geometry | Discretization | ||||||
| width | 10 | m | step size x | m | |||
| height | 1 | m | step size y | m | |||
| depth | 10 | m | time step | 1 | s | ||
| height of PHX | m | time horizon | 36 and 72 | h | |||
| number of PHXs | 1 and 3 | ||||||
| Material | |||||||
| medium (dry soil) | fluid (water) | ||||||
| mass density | 2000 | kg/m3 | 998 | kg/m3 | |||
| specific heat capacity | 800 | J/(kg·K) | 4182 | J/(kg·K) | |||
| thermal conductivity | W/(m·K) | W/(m·K) | |||||
| thermal diffusivity | m2/s | m2/s | |||||
| velocity during pumping | m/s | inlet temp.: charging | 40 | °C | |||
| heat transfer coefficient | 10 | W/(m2·K) | heat pump spread | 3 | K | ||
| initial temperature | 10 and 35 | °C | underground temp. | 15 | °C | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Takam, P.H.; Wunderlich, R. Numerical Simulation of the Input-Output Behavior of a Geothermal Energy Storage. Energies 2025, 18, 1558. https://doi.org/10.3390/en18061558
Takam PH, Wunderlich R. Numerical Simulation of the Input-Output Behavior of a Geothermal Energy Storage. Energies. 2025; 18(6):1558. https://doi.org/10.3390/en18061558
Chicago/Turabian StyleTakam, Paul Honore, and Ralf Wunderlich. 2025. "Numerical Simulation of the Input-Output Behavior of a Geothermal Energy Storage" Energies 18, no. 6: 1558. https://doi.org/10.3390/en18061558
APA StyleTakam, P. H., & Wunderlich, R. (2025). Numerical Simulation of the Input-Output Behavior of a Geothermal Energy Storage. Energies, 18(6), 1558. https://doi.org/10.3390/en18061558