1. Introduction
With the depletion of traditional fossil energy sources and growing environmental concerns [
1,
2,
3], the search for clean, sustainable energy sources is urgent. As global energy demand continues to increase, renewable energy’s competitiveness is rapidly improving. Research shows that it is expected to account for half of global energy use in 2035, and the energy mix will continue to decarbonize [
4]. Solar energy is a type of energy generated by solar radiation [
5], which is increasingly being emphasized due to its non-polluting and sustainable generation. Solar energy can be used to generate thermal energy or it can be converted into electricity through photovoltaic (PV) systems [
6]. When sunlight hits a photovoltaic module, photons excite electrons in the semiconductor material, prompting them to move, which creates an electric current [
7]. Solar photovoltaic (PV) technology is now playing an important role in a number of fields, and building-integrated photovoltaic (BIPV) technology, in particular, has considerable potential in the utilization of solar energy [
8,
9,
10,
11,
12]. The strength of the current generated by a photovoltaic module depends greatly on the amount of solar radiation energy it receives. Therefore, PV brackets play an important role in improving the yield of PV power generation systems. By using PV brackets, the PV modules can be maximized to be perpendicular to the incident light from the sun, and the power generation efficiency of the PV modules can be improved.
In order to enhance the power generation efficiency of photovoltaic modules, many scholars have carried out a large number of in-depth research in the field of photovoltaic power generation since Finster [
13] designed a mechanical solar tracking system in 1962. In 1975, McFee [
14], in an effort to increase the efficiency of energy harvesting per unit of time, proposed a new tracking system that utilized a central collector to gather the light concentrated by the surrounding reflector units and determine the position of the sun based on the data reflected by each reflector unit. Abdallah et al. [
15] designed an open-loop, programmable logic controller-controlled, dual-axis solar tracking bracket that increased the solar irradiation energy received by the PV modules by 41.34% compared to a fixed bracket oriented in a due south direction with a tilt angle of 32°. Song et al. [
16] designed a dual-axis tracking bracket system based on a fiber optic composition, which consists of two feedback loops that utilize an angle encoder and a specific array of wide-area diodes for angular adjustment, resulting in a tracking accuracy error of the PV module within 0.1°. Gabe et al. [
17] designed a two-axis tracking bracket system consisting of a mechanical structure and an electrical system, which was utilized to accurately determine the position of maximum solar radiation even under cloudy weather conditions using the system’s control logic. The current status, constraints, and future trends of the sustainable development of solar photovoltaic (PV) tracking technology have been studied by Yang Zihan et al. [
18]. The results of these studies not only enhance the economic efficiency of solar tracking systems but also their environmental adaptability [
19,
20,
21,
22,
23]. However, of the many designs, almost all of them are to improve the tracking accuracy in the working process to increase additional revenue, and there are few articles directly targeting the optimization design of PV bracket construction cost. The reason for this is that the PV tracking bracket structure can be optimized in a small space, and the relevant design manuals can be referenced to a single form of design.
PV brackets can be categorized into fixed brackets [
24], single-axis tracking brackets [
25,
26], and dual-axis tracking brackets [
27] according to the number of rotating axes [
28,
29,
30]. Compared with fixed brackets, single-axis tracking brackets usually only track changes in solar azimuth or elevation angle, and can obtain an additional 10–25% power generation gain on the basis of only a 7–10% increase in investment [
17,
31,
32]; dual-axis tracking brackets can track changes in solar azimuth and elevation angle at the same time, which significantly improves the power generation gain, but the cost is also relatively high [
33,
34,
35,
36,
37].
Aiming to seek a balance between the power generation efficiency of PV systems and system cost, C. Alexandru proposed a single motor-driven dual-axis solar tracking mechanism [
38], and its simulation analysis shows that this bevel gear-cam type mechanism can produce an effect close to dual-axis tracking, and the solar radiation received by its PV modules will be significantly higher than that of fixed PV brackets but lower than that of a dual-motor-driven dual-axis tracking system, characterized by minimizing the use of drive motors and achieving a certain balance between tracking effect and equipment cost, but the study does not give the verification results of the physical system. Inspired by it, this paper carries out the design, simulation, and analysis of a single-motor-driven quasi-biaxial PV bracket system, which is a solar tracking mechanism that can be driven by a single motor. It utilizes a mechanical transmission to achieve the simultaneous tracking of PV modules to the sun’s azimuth and elevation angles, and experimental validation is carried out.
2. Design Principle of the Quasi-Biaxial Solar Tracker
According to the movement law of the sun, combined with the movement form and characteristics of the dual-axis tracking bracket, a new type of solar tracking bracket is proposed [
38], which utilizes a mechanical transmission device to replace the motor that drives the rotation of the elevation axis, and realizes the simultaneous tracking of the PV module to the sun’s azimuth angle and elevation angle by a driving motor. In this paper, this tracking bracket mechanism is called quasi-biaxial and its design principle is given in this section.
Every day, the sun rises in the east and sets in the west due to the rotation of the Earth. From the heliocentric theory, it can be seen that the Earth is rotating around the Sun. In order to facilitate people the analysis of the Sun’s motion, this paper assumes that the Sun is around the Earth in a circular motion, as shown in
Figure 1, and this circular motion is called the Sun’s apparent motion. To specifically describe the position of the Sun, the Sun’s position is usually labeled using the Sun’s azimuth
[
39] and elevation angles
[
40], where azimuth is 0° to the due south, negative to the east, and positive to the west [
39]. Therefore, the PV tracking bracket needs to track the changes in solar azimuth angle and solar elevation angle, respectively, to realize the accurate tracking of the PV module to the Sun’s position [
41].
The solar elevation angle
is calculated by the following formula [
40]:
The solar azimuth angle
is given by [
39]
where
is the local latitude [
40] and
is the angle of declination, which is the angle of the line between the Sun and the center of the Earth and the plane of the equator, as specified by the following formula [
42,
43]:
where
,
is the accumulation day [
21].
is the time angle and is calculated as [
40]
is Beijing time and
is the longitude of the location.
is the time difference, calculated as [
44]
in Equation (5) is the same as the formula for in Equation (3).
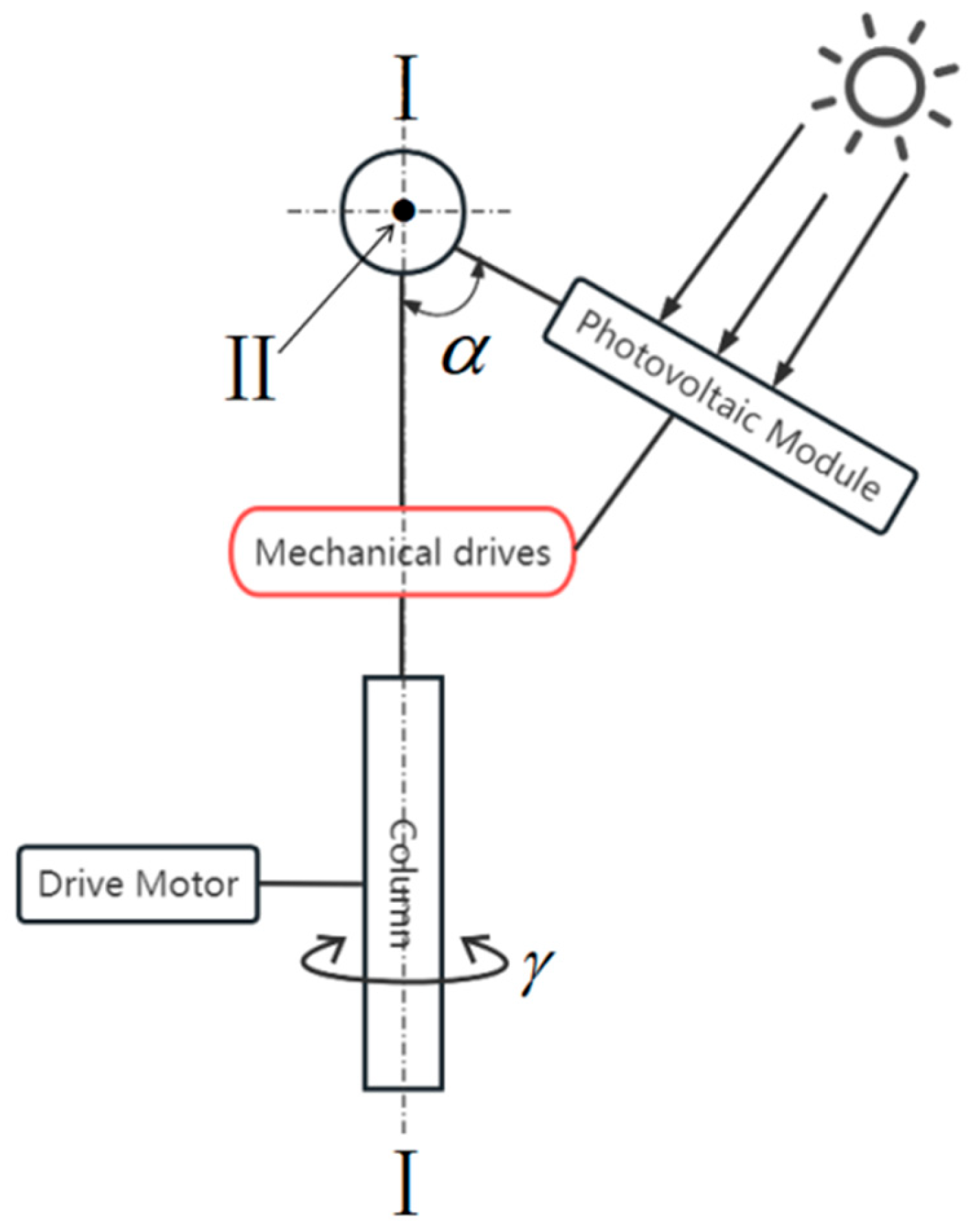
The structural principle schematic of the quasi-biaxial solar tracker shown in
Figure 2 takes the azimuth dual-axis tracking system as the design model [
45], and its main motion axis is perpendicular to the ground, which provides good stability for the overall structure. By setting motor 1 as the power source of the overall device, the photovoltaic module is driven to rotate horizontally by means of time control to realize the tracking of the azimuth angle of the sun by the photovoltaic module; at the same time, a mechanical transmission device is used to replace the motor that drives the elevation axis, so as to realize the tracking of the Sun’s elevation angle by the photovoltaic module.
Its azimuth axis and elevation axis have the following main characteristics when tracking the Sun:
- (1)
The spatial positions of the azimuth and elevation axes are perpendicular to each other: ;
- (2)
The angular speeds of rotation of the azimuth and elevation axes are different: ;
- (3)
The azimuth and elevation axes rotate according to the azimuth and elevation angles of the Sun, respectively, and the rotation range of the azimuth axis is much larger than that of the elevation axis: .
The azimuth and elevation axis have the same rotation period: .
The pattern of the Sun’s movement throughout the year is as follows: in the spring the Sun is located near the equator; in the summer the Sun is located between the equator and the meridian of the inner return; in the fall the Sun is once again located near the equator; and in the winter the Sun is located between the equator and the meridian of the southern return. The Sun, centered on the equator, sweeps back and forth between the Tropic of Cancer and the Tropic of Capricorn, once a year, in a continuous cycle that creates the phenomenon of sequential alternation of seasons on Earth throughout the year. Due to the Sun’s different daily declination angles and the differences in the formulae for calculating total and direct irradiance on clear days, the Sun’s elevation angle is different every day, adding difficulties to the design of the mechanical drive and placing higher demands on the tracking control system [
46,
47,
48].
In order to simplify the tracking system, the year is divided into several time periods with similar solar path characteristics based on the changing pattern of the total number of clear-sky radiation days. For a certain period of time, calculate the average value of the Sun’s declination angle for all the days in the period of time, select the day in the period of time when the Sun’s declination angle is closest to the average value as the “characteristic day” in the period of time, and use the rule of change of the Sun’s elevation angle of that day to represent the change of the Sun’s elevation angle of each day in the whole period of time.
The theoretical light intensity of the Sun at a given time can be calculated from the Belyand theoretical equation, which is given as [
49,
50,
51]
where
is the solar system number of size:
;
is the solar elevation angle;
is the Castroff coefficient, which is determined by the state of atmospheric transparency and is used to characterize the effect on the amount of radiation as the content of the different components of the atmosphere varies. On an ideal clear day with good atmospheric transparency, the
-value varies less during the day and can be considered to be constant, as specified in the following formula [
21]:
where
is the local ground water vapor pressure.
Let
,
; then, Equation (1) is
, which is brought into Equation (6), and the total number of sunny radiant days in a day’s time can be obtained by integrating over time [
52,
53].
Using
to convert time differentiation into diagonal differentiation, we have
where
and
are the time angles at the beginning and end of a time period, respectively, and when
and
, the equation is the formula for calculating the total daily value of total radiation on a clear day.
The division of the time period and the selection of the characteristic days take into account two main factors: the total number of sunny radiation days and the angle of declination. Based on the relationship between the total number of radiant days and the angle of declination on a clear day, combined with the formula for the angle of declination, the equation for the relationship between the total number of radiant days and cumulative days is expressed as follows [
54]:
The total number of sunny radiation days in a year is obtained by using Equation (8), and the values of parameters , , and in Equation (9) are solved based on the values obtained from the calculation results, and then substituted into Equation (9), which is the relationship equation between the total number of sunny radiation days and the cumulative number of days.
For example, the total number of sunny radiant days in a year is divided into three intervals corresponding to the four seasons of the year: spring, summer, fall, and winter, with spring and fall as one interval, located between the summer months of winter. The specific segmentation nodes are as follows:
where
is the maximum value of the total number of sunny radiation days in a year and
is the minimum value.
As shown in
Figure 3, when
, the corresponding product days
and
are solved, and when
, the corresponding product days
and
are solved. The year was divided into four time periods based on the resulting product days:
,
,
, and
of the second year, and the mean value of the angle of declination within each time period was calculated, and the day with the angle of declination closest to the mean value within the time period was used as the characteristic day of the time period.
3. Structural Design of Quasi-Biaxial Solar Tracker
The overall structure is shown in
Figure 4, including an azimuth angle tracking mechanism and an elevation angle tracking mechanism, which mainly consists of parts such as a 1—bracket base; 2—drive motor; 3—column; 4—beam; 5—photovoltaic module frame; 6a, 6b—bevel gear; 7—fixed support guide bearing; 8—drive shaft; 9—cam; 10—cam follower; 11—cam follower fixing support, and so on. While in the bracket base 1 provides good stability for the overall device; the drive motor 2 is fixed inside the bracket base 1, and the output shaft of the drive motor 2 passes through the opening at the top of the bracket base and is connected to the column 3 via a flange coupling; the beam 4 is connected to the column 3 via a two-way connector fixture; the beam 4 is fitted with a pin holder, which is connected to the photovoltaic module frame 5 by means of a pin, and the photovoltaic modules are mounted on the photovoltaic module frame 5; a fixed support guide bearing 7 is bolted to the side of the column 3; the drive shaft 8 is connected to the fixed support guide bearing 7 by means of an interference fit, and a keyway is provided on the drive shaft 8, and the vertical bevel gear 6b and the cam 9 are fixed to the drive shaft 8 by means of a key connection and a shaft-end retaining ring; the horizontal bevel gear 6a is in contact with the upper-end surface of the bracket base 1 by means of its own gravity and is fixed to the bracket base 1 by means of a key connection; and the cam follower 10 is held by the cam follower fixing support 11 restricting its 5 degrees of freedom so that the cam follower 10 can only slide axially within the end fixing ring of the cam follower fixing support 11; one end of the cam follower 10 is connected to the contoured surface of the cam 9, and the other end slides on the backside of the photovoltaic module frame 5 by means of a roller. In the azimuth tracking mechanism, the photovoltaic module frame is directly connected to the drive motor through the beam and column, and the drive motor drives the photovoltaic group frame to rotate horizontally, realizing the tracking of the Sun’s azimuth angle. The elevation angle tracking mechanism is mounted on the side of the column, through the bevel gear mechanism and cam mechanism, to realize the PV module to the Sun’s elevation angle tracking. A fixing bracket is provided in the center of the cam follower to support the cam follower and limit its degrees of freedom. The drive motor operates in conjunction with the bevel gear mechanism and cam mechanism to enable the PV module to track the Sun’s azimuth angle while tracking the Sun’s elevation angle.
According to the motion characteristics of the tracking bracket and the tracking principle, the design of the mechanical transmission device needs to meet the following requirements at the same time:
- (1)
The azimuth axis needs to generate an additional motion in the vertical direction to power the rotation of the elevation axis as it rotates horizontally;
- (2)
The mechanism causes the photovoltaic module to produce a rotation of the elevation axis that needs to be less than the rotation of the motor-driven azimuth axis;
- (3)
The mechanism needs to change the rotational speed of the azimuth axis to the desired rotation speed of the elevation axis;
- (4)
The azimuth and elevation axes need to start and finish work at the same time.
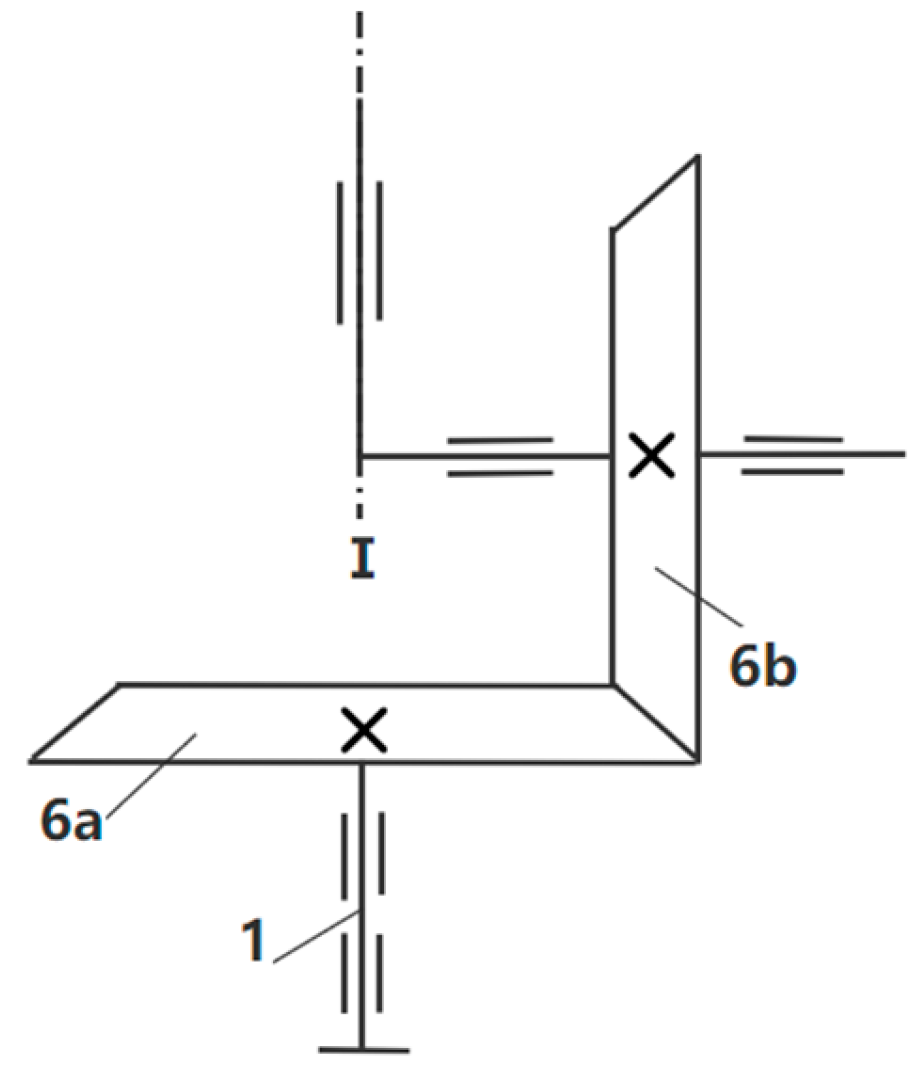
Figure 5 shows a sketch of the movement of the bevel gear mechanism, wherein the use of the bevel gear transmission mechanism can rack the horizontal rotation of the bracket at the same time and additionally obtain a vertical direction of movement to ensure that the rotation axis changes. The horizontal bevel gear 6a is rigidly connected to the base of the bracket, and the vertical bevel gear forms a gear-mating relationship with it and moves in a circular motion around the bracket base 1 or azimuth axis I along with the overall device, providing a power source for the cam to rotate. In order to satisfy the rotation of the azimuth and elevation axis as a one-day cyclic cycle change, the transmission ratio between the two bevel gears is 1:1.
The cam and vertical bevel gear are installed in the same shaft, with the bevel gear as the active part, cam as a follower, cam follower for the roller direct-acting follower, and photovoltaic modules connected to the use of the space triangular geometric relationship can make the cam follower action on the photovoltaic modules produced by the effect of the movement in line with the changing law of the Sun’s elevation angle, which realizes the photovoltaic modules on the Sun’s elevation angle of the tracking.
As shown in
Figure 6, when the cam follower is placed horizontally, the cam structure size is too large, and jamming occurs during the push period, so the spatial structure size of the cam is reduced by changing the tilt angle of the cam follower in order to reduce the long axis of the cam while the structure size of the cam follower remains unchanged. The distance between the center of rotation of the cam and the frame of the PV module is calculated as follows:
where
is the sun elevation angle and
is the tilt angle of the cam follower.
The maximum change in the length of while tracking the solar elevation angle is the difference between the maximum and minimum values of : . According to the change range of the Sun’s elevation angle which can be introduced to the change range of , and take the value of when is as small as the tilt angle of the cam follower, you can minimize the structural size of the cam mechanism.
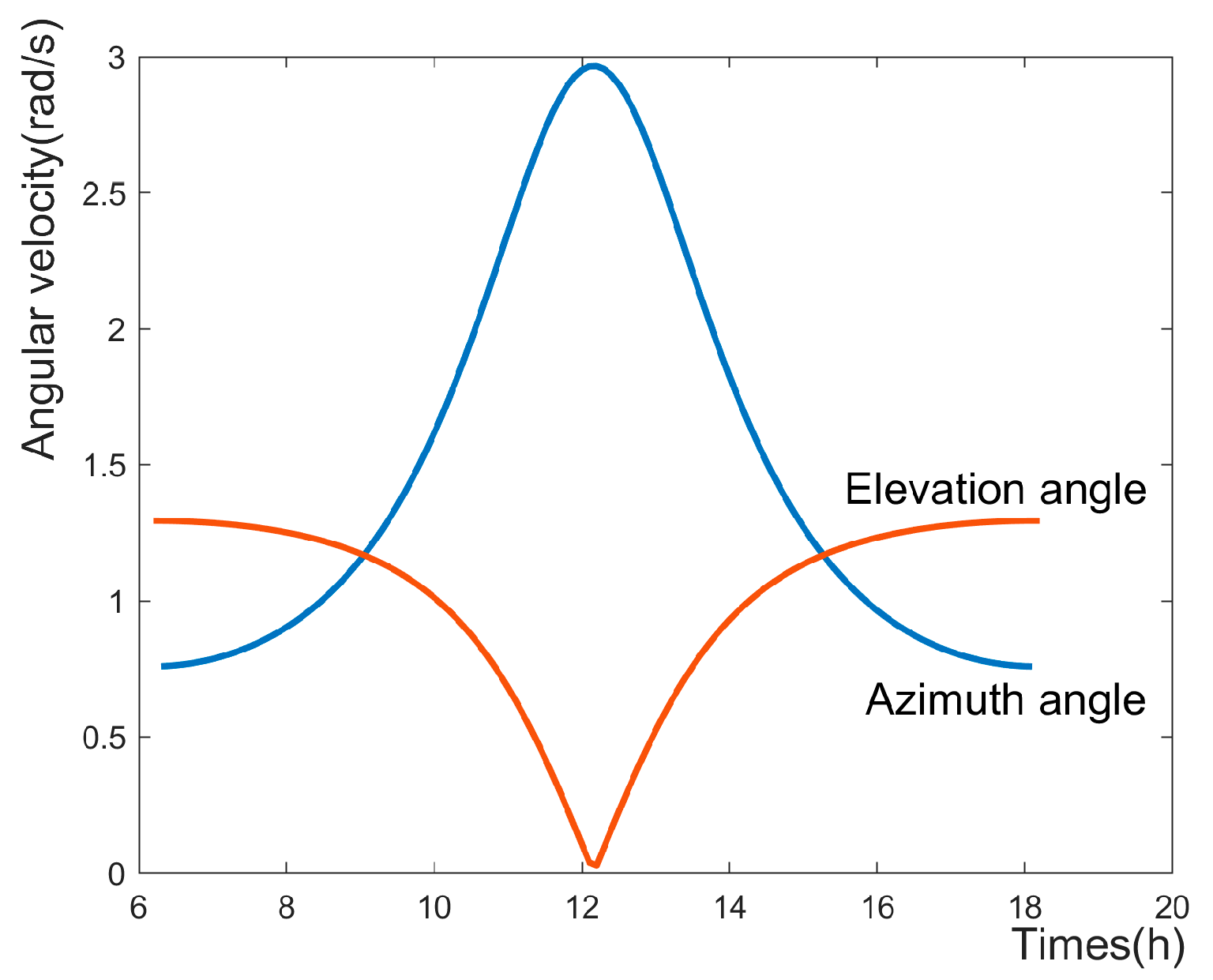
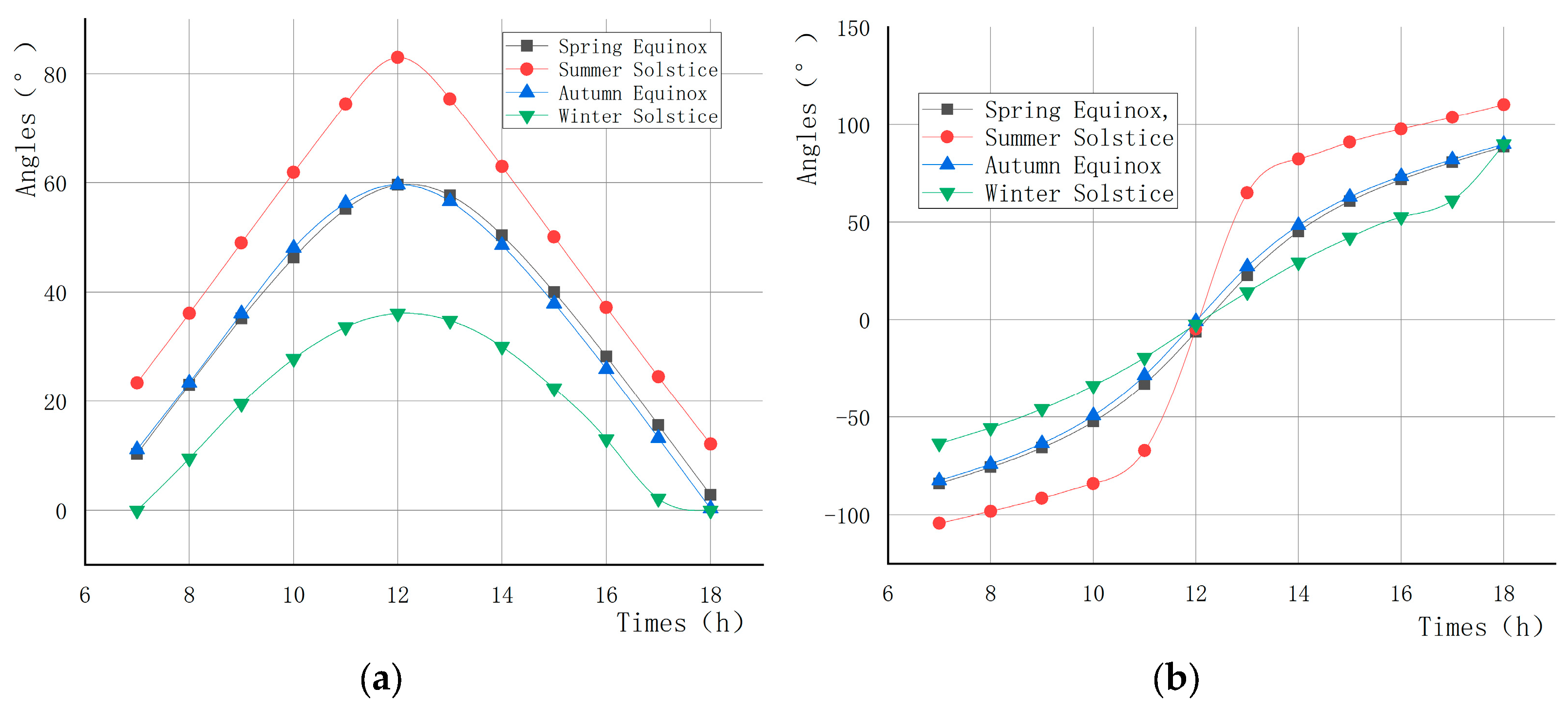
The angular speeds of the Sun’s azimuth and elevation angles are different throughout the day, so in order to avoid the cams alternating between accelerating and decelerating repeatedly during operation, resulting in a self-locking situation where the pressure angle is too large, the cams are made to perform only accelerating or decelerating motions during operation.
As shown in
Figure 7, MATLAB software is used to calculate and plot the variation curves of the angular velocity
of the solar azimuth and the angular velocity
of the elevation angle, respectively. The moment when the azimuth angular velocity
and the elevation angular velocity
are equal for the first time is taken as the start time of the cam push period, and the moment when they are equal for the second time is taken as the end time of the cam push period, i.e., the cam is only accelerating or decelerating during the push period, which avoids the self-locking phenomenon of the cam having too large a pressure angle during the push period.
The cam pressure angle is the high vice contact point of the positive pressure direction and of the cam follower force action point of the linear velocity direction of the acute angle, and the pressure angle of the expression of the cam used in this paper for the roller direct-acting follower plane rotary cam mechanism is [
55]
where is
eccentricity distance;
is the sign coefficient of eccentricity distance, which is 1 for left offset and −1 for right offset, and the offset schematic is shown in
Figure 8;
is the cam follower’s class speed;
is the perpendicular distance between the center of the cam follower roller’s circle in the cam follower’s motion direction and the center of the cam’s rotation.
The contour curve equations of the cams are obtained based on the motion inversion using analytical geometry calculations, and the specific design process is as follows: According to a specific day of the Sun’s elevation angle of the movement trajectory of photovoltaic components of the angle change rule of the elevation axis, the use of spatial triangular geometric relationship to obtain the cam follower’s movement law, combined with the angular speed of the cam rotation change rule, can help to obtain the cam contour curve. Therefore, the cam structure of the four seasons can be replaced according to the change rule of the solar elevation angle in a year to improve the tracking accuracy of the photovoltaic bracket on the solar elevation angle.
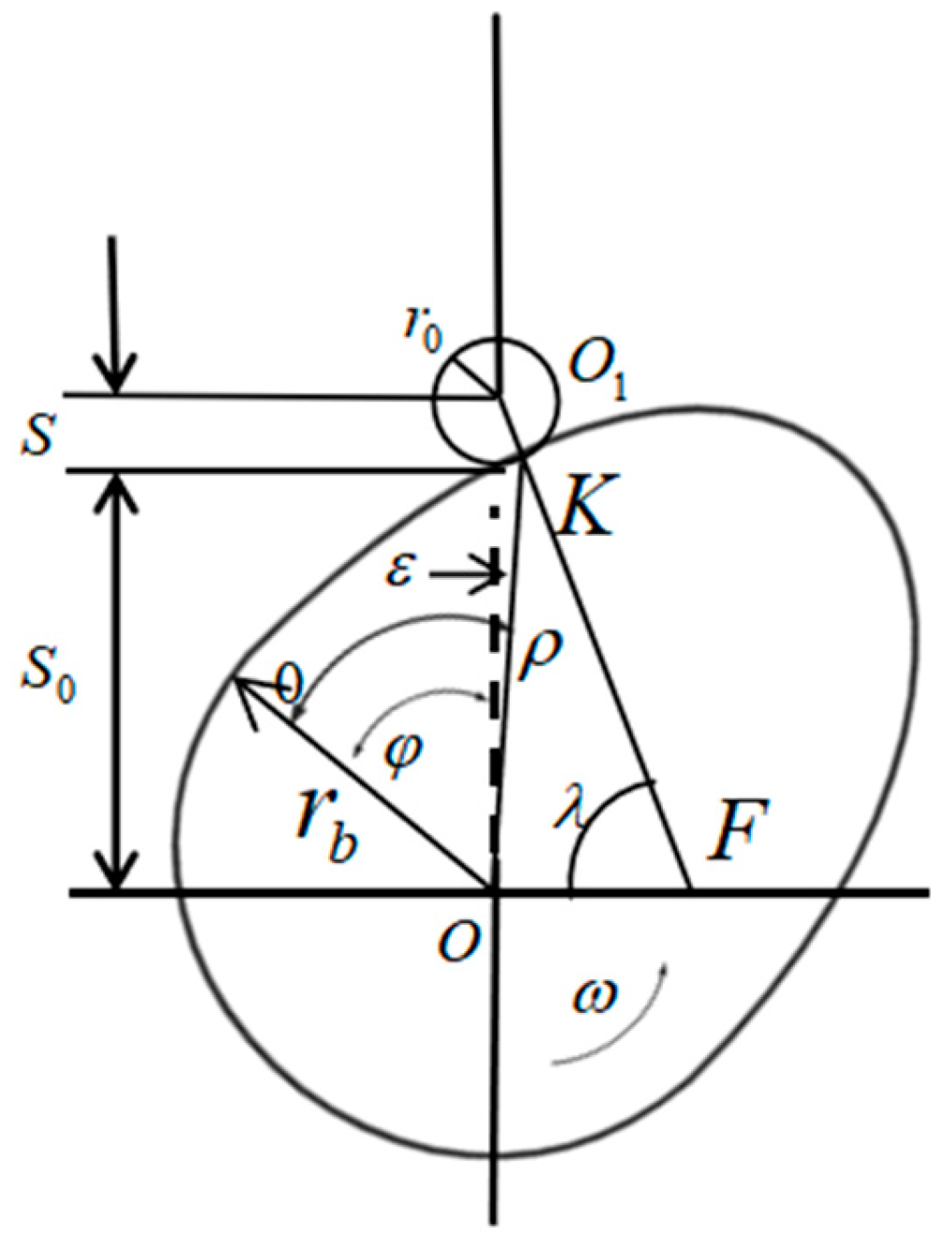
Based on the solar azimuth and elevation angles and the local latitude, the theoretical profile equation of the cam is obtained using the following analytical method:
where
is the class speed of the cam follower,
is the length of
minus the length of the cam follower,
is the radius of the roller,
is the angle between the line connecting the center of the roller and the point of contact of the cam surface and the horizontal,
is the angle of rotation of the cam, and
is the angle between the line connecting the center of the roller and the center of rotation of the cam and the line connecting the point of contact of the cam surface and the center of rotation of the cam, and the specific positions and sizes of the individual parameters are expressed as shown in
Figure 9 [
56].
The formulae for each parameter are as follows:
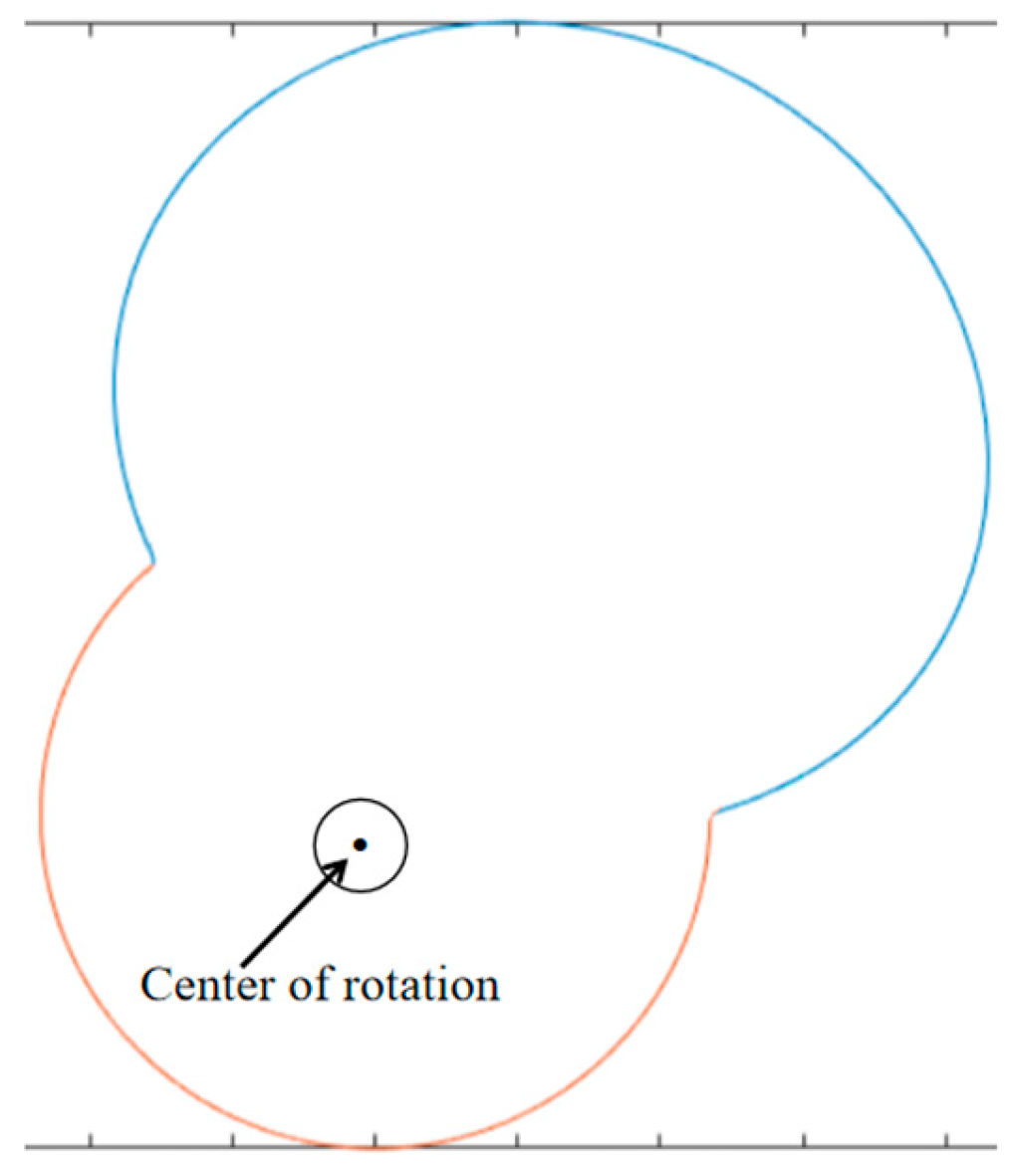
Taking place in Wuhan City as an example, which is located at 114°35′ E longitude and 30°38′ N latitude, the contour curve of the cam is calculated and plotted according to Equations (15)–(19), as shown in
Figure 10, and it is found that the cam contour line has an obvious concave portion in the near-rest period at the junction of the push period and the return period. As shown in
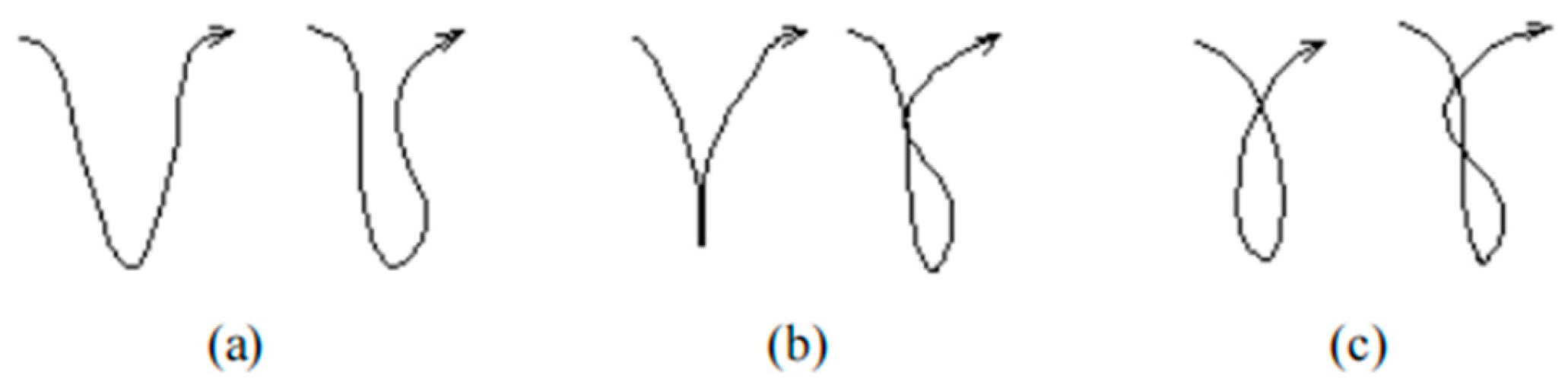
Figure 11, when the cam roller passes through the lower concave part of the cam surface, the running trajectory of the roller center may appear as (a) phase separation, (b) tangent, (c) intersection of three types; if the cam follower roller parameters are not selected reasonably, the running trajectory of the cam follower roller will appear in the intersection phenomenon, as shown in
Figure 11c. At this time, the pressure angle of the cam mechanism changes dramatically, resulting in the cam mechanism self-locking. This paper refers to this phenomenon as the cam mechanism of the top cut phenomenon [
57].
When the cam follower is a pointed follower, i.e., when the cam follower’s roller radius is 0, the cam follower passes through the concave portion of the cam surface with the roller center generating a running track, as shown in
Figure 11a, and at this time, there is no top-cutting in the cam mechanism. When the cam follower stands for the roller follower, with the gradual increase in the cam follower roller radius, the cam surface in and out of the concave part of the two parts of the roller center of the running track will gradually close. When the cam follower roller radius increases to a certain extent, the roller center will produce the running track shown in
Figure 11b, and reach the critical point of the cam self-locking. If the radius of the cam follower roller is larger than the critical value, it will produce a running trajectory as shown in
Figure 11c, at which time the pressure angle of the cam mechanism increases sharply and the cam mechanism undergoes top-cutting.
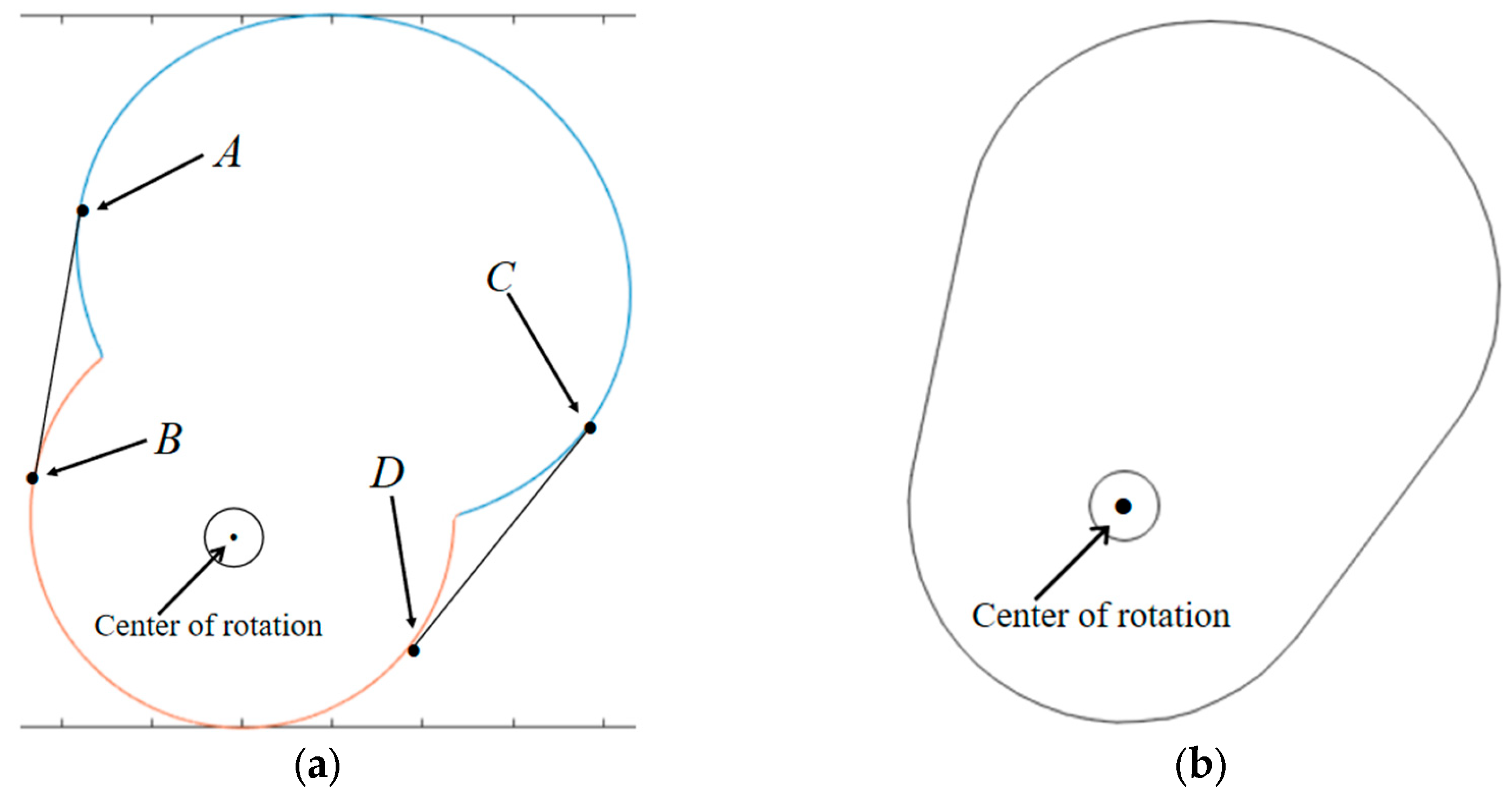
Due to the existence of corners in the theoretical cam profile curve, the cam follower is a roller direct-acting follower, which is affected by the diameter of the roller, and the cam needs to be engineered in order to avoid the phenomenon of hair top-cutting. As shown in
Figure 12a, according to the characteristics of the cam contour curve in the near-rest period and the push period, corresponding to the two parts of the curve to find the tangent line slope of the same point, that is,
,
, will be used to correct the angle of the convex contour line of the two–two connection, and the corrected cam contour curve is shown in
Figure 12b. The correction of both convex contour lines makes the cam mechanism smooth and flat during the working process and avoids the phenomenon of top-cutting, which causes the pressure angle to change and thus affects the normal working condition.
At this time, the tracking accuracy of the tracking bracket on the Sun’s elevation angle will be reduced, but due to the two corresponding specific times for the morning sunrise as well as evening sunset, the Sun’s light intensity is not high at this time. Even if this time is completely tracked, the additional power generation gain generated by the PV module is also minimal, so in practice, the loss of power generation generated during this time period is negligible.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}