
Enhanced Raccoon Optimization Algorithm for PMSM Electrical Parameter Identification



Abstract
1. Introduction
2. Parameter Identification of PMSM
3. Enhanced ROA
3.1. Characteristics of ROA
3.2. Adaptive Exploration Radius Strategy
3.3. Raccoon-Washing-Food-Inspired Strategy
3.4. Escaping-Predator Strategy
4. Simulation and Experimental Methods
4.1. Algorithm Testing
4.2. Simulation Analysis
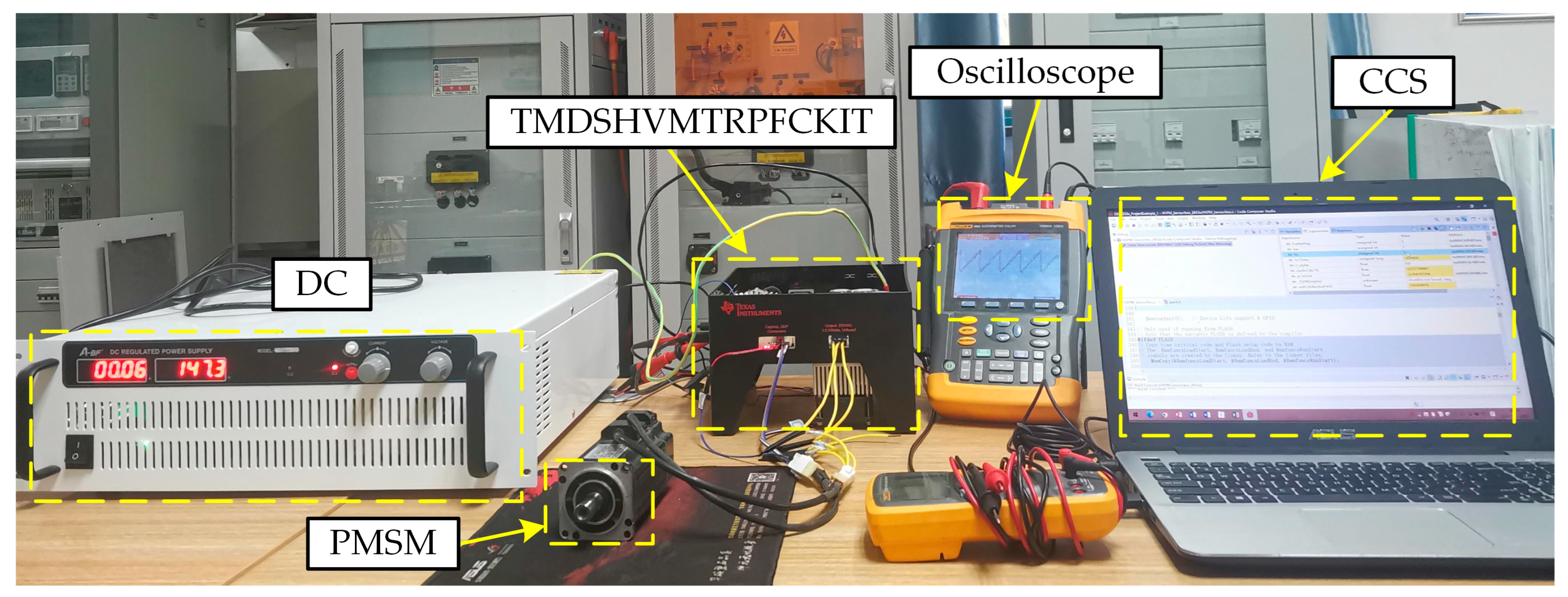
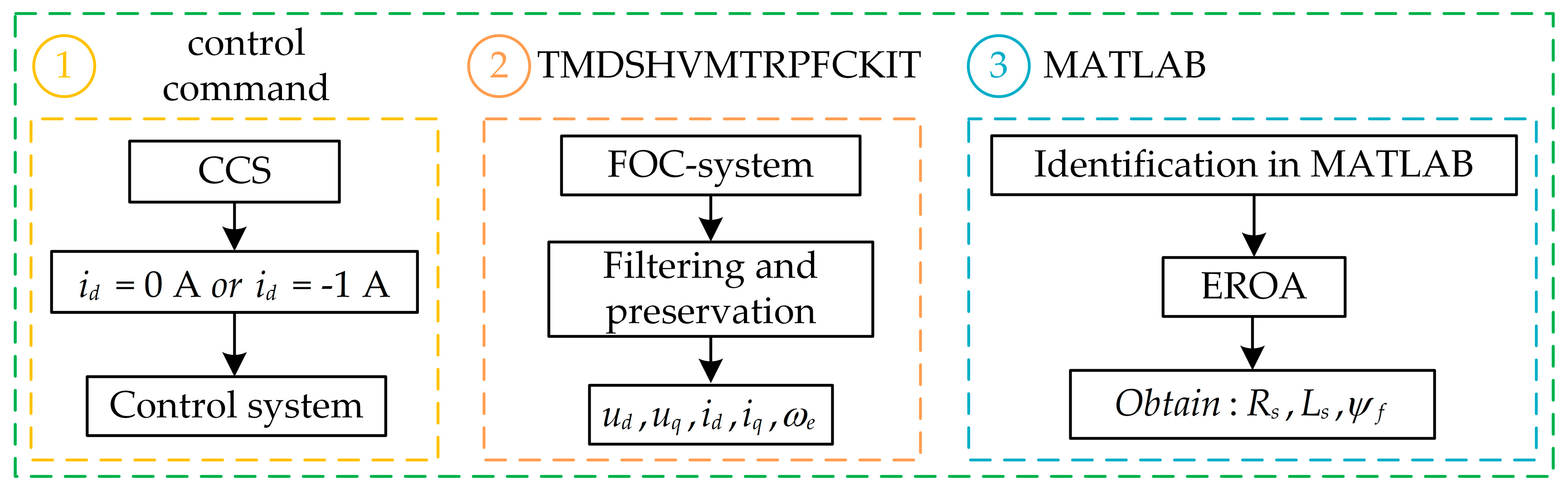
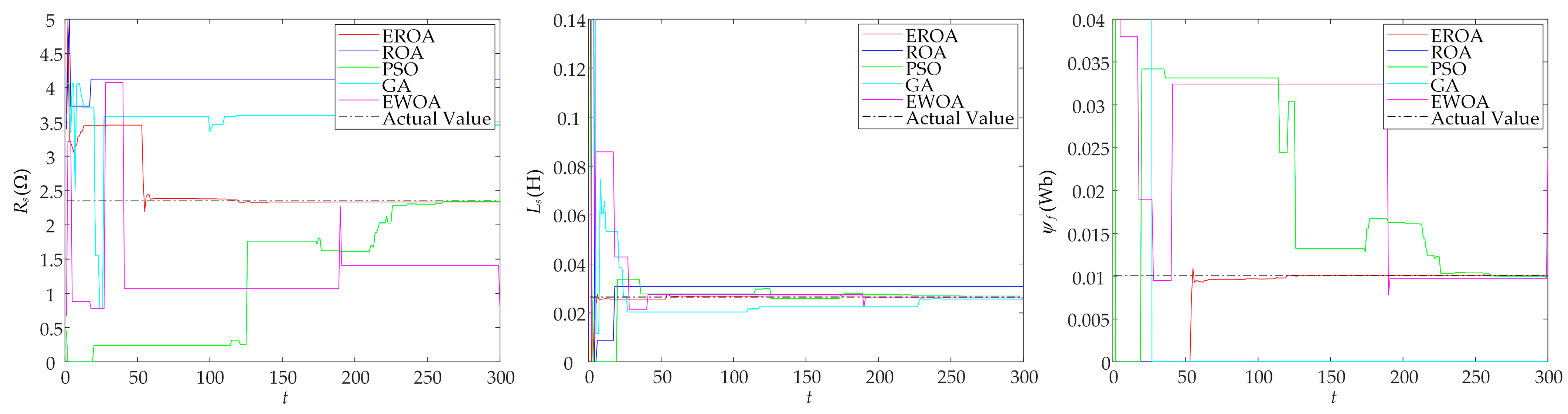
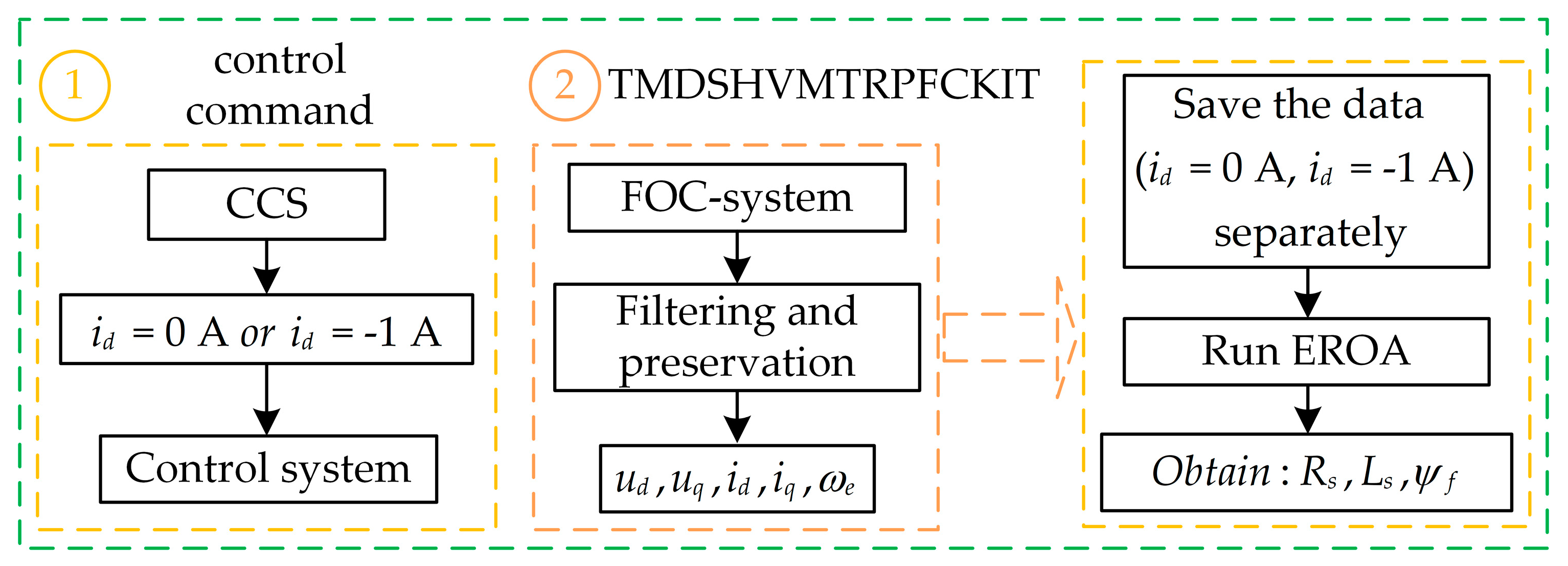
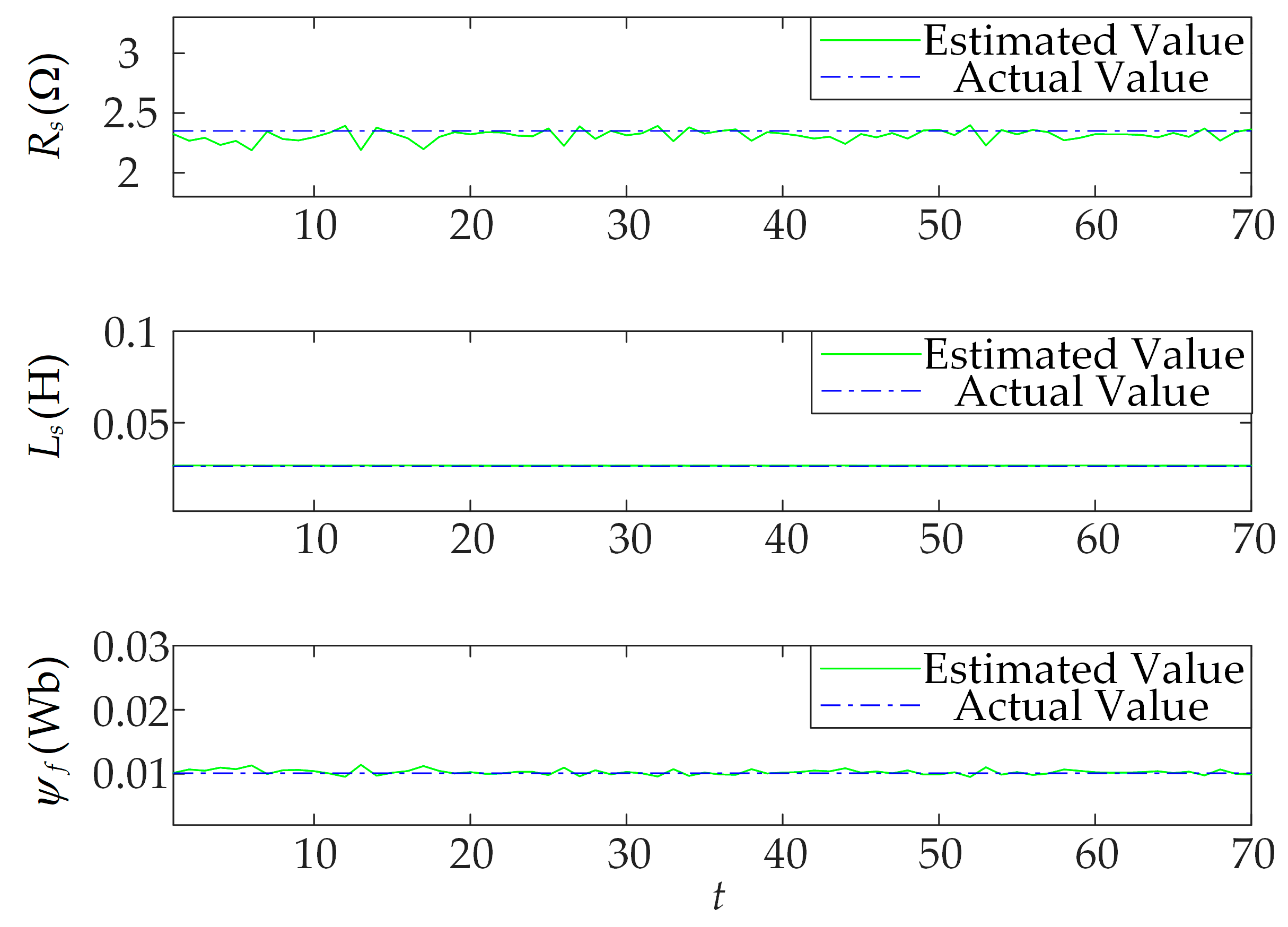
4.3. Experimentation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Liao, W.; Huang, S.; Zhang, J.; Yang, M.; Li, C.; Huang, S. A Robust DPCC for IPMSM Based on a Full Parameter Identification Method. IEEE Trans. Ind. Electron. 2023, 70, 7695–7705. [Google Scholar] [CrossRef]
- Liu, S.; Wang, Q.; Wang, G.; Li, B.; Ding, D.; Zhang, G.; Xu, D. Virtual-Axis Injection Based Online Parameter Identification of PMSM Considering Cross Coupling and Saturation Effects. IEEE Trans. Power Electron. 2023, 38, 5791–5802. [Google Scholar] [CrossRef]
- Shen, Y.; Zheng, Z.; Wang, Q.; Liu, P.; Yang, X. DC Bus Current Sensed Space Vector Pulsewidth Modulation for Three-Phase Inverter. IEEE Trans. Transp. Electrif. 2021, 7, 815–824. [Google Scholar] [CrossRef]
- Chen, Z.; Qiu, J. Adjacent-Vector-Based Model Predictive Control for Permanent Magnet Synchronous Motors With Full Model Estimation. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 1317–1331. [Google Scholar] [CrossRef]
- Yang, X.; Liu, G.; Le, V.D.; Le, C.Q. A Novel Model-Predictive Direct Control for Induction Motor Drives. IEEJ Trans. Electr. Electron. Eng. 2019, 14, 1691–1702. [Google Scholar] [CrossRef]
- Woldegiorgis, A.T.; Ge, X.; Zuo, Y.; Wang, H.; Hassan, M. Sensorless Control of Interior Permanent Magnet Synchronous Motor Drives Considering Resistance and Permanent Magnet Flux Linkage Variation. IEEE Trans. Ind. Electron. 2023, 70, 7716–7730. [Google Scholar] [CrossRef]
- Liu, P.; Liu, D.; Shen, Y.; Liu, A.; Yang, X.; Zhao, J. Full Speed Range Position-Sensorless Compound Control Scheme for PMSMs. J. Power Electron. 2022, 22, 1302–1312. [Google Scholar] [CrossRef]
- Brosch, A.; Wallscheid, O.; Bocker, J. Long-Term Memory Recursive Least Squares Online Identification of Highly Utilized Permanent Magnet Synchronous Motors for Finite-Control-Set Model Predictive Control. IEEE Trans. Power Electron. 2023, 38, 1451–1467. [Google Scholar] [CrossRef]
- Huang, X.; Yu, Y.; Li, Z.; Chen, Z.; Huang, S.; Niu, F.; Zhang, J. Online Identification of Inductance and Flux Linkage for Inverter-Fed SPMSMs Using Switching State Functions. IEEE Trans. Power Electron. 2023, 38, 917–930. [Google Scholar] [CrossRef]
- Dai, S.; Wang, J.; Sun, Z.; Chong, E. Transient Performance Improvement of Deadbeat Predictive Current Control of High-Speed Surface-Mounted PMSM Drives by Online Inductance Identification. IEEE Trans. Ind. Electron. 2022, 69, 12358–12368. [Google Scholar] [CrossRef]
- Hinkkanen, M.; Pescetto, P.; Mölsä, E.; Saarakkala, S.E.; Pellegrino, G.; Bojoi, R. Sensorless Self-Commissioning of Synchronous Reluctance Motors at Standstill Without Rotor Locking. IEEE Trans. Ind. Appl. 2017, 53, 2120–2129. [Google Scholar] [CrossRef]
- Wang, G.; Qu, L.; Zhan, H.; Xu, J.; Ding, L.; Zhang, G.; Xu, D. Self-Commissioning of Permanent Magnet Synchronous Machine Drives at Standstill Considering Inverter Nonlinearities. IEEE Trans. Power Electronics. 2014, 29, 6615–6627. [Google Scholar] [CrossRef]
- Odhano, S.A.; Pescetto, P.; Awan, H.A.A.; Hinkkanen, M.; Pellegrino, G.; Bojoi, R. Parameter Identification and Self-Commissioning in AC Motor Drives: A Technology Status Review. IEEE Trans. Power Electron. 2019, 34, 3603–3614. [Google Scholar] [CrossRef]
- Zhang, J.; Peng, F.; Huang, Y.; Yao, Y.; Zhu, Z. Online Inductance Identification Using PWM Current Ripple for Position Sensorless Drive of High-Speed Surface-Mounted Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2022, 69, 12426–12436. [Google Scholar] [CrossRef]
- Yang, X.-L.; Liu, G.-R.; Chen, N.-H.; Lou, T.-S. Desensitized Ensemble Kalman Filtering for Induction Motor Estimation. IEEE Access 2019, 7, 78029–78036. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, G.; Wang, G.; Li, C.; Xu, D.G. Offline Parameter Self-Learning Method for General-Purpose PMSM Drives with Estimation Error Compensation. IEEE Trans. Power Electron. 2019, 34, 11103–11115. [Google Scholar] [CrossRef]
- Yang, Q.; Mao, K.; Zheng, S.; Zhou, C.; Zhong, Q. Position Sensorless Drive with Online Parameters Estimation for Magnetic Suspension Centrifugal Compressor. IEEE Trans. Power Electron. 2023, 38, 9384–9394. [Google Scholar] [CrossRef]
- Yu, Y.; Huang, X.; Li, Z. Overall Electrical Parameters Identification for IPMSMs Using Current Derivative to Avoid Rank Deficiency. IEEE Trans. Ind. Electron. 2023, 70, 7515–7520. [Google Scholar] [CrossRef]
- Liu, K.; Zhu, Z.Q.; Zhang, Q.; Zhang, J. Influence of Nonideal Voltage Measurement on Parameter Estimation in Permanent-Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2012, 59, 2438–2447. [Google Scholar] [CrossRef]
- Chen, K.; Xiao, L.; Zhang, B.; Yang, M.; Yang, X.; Guo, X. Decoupling Algorithm for Online Identification of Inductance in Permanent Magnet Synchronous Motors Based on Virtual Axis Injection Method and Sensorless Control. Energies 2024, 17, 6308. [Google Scholar] [CrossRef]
- Li, X.; Kennel, R. General Formulation of Kalman-Filter-Based Online Parameter Identification Methods for VSI-Fed PMSM. IEEE Trans. Ind. Electron. 2021, 68, 2856–2864. [Google Scholar] [CrossRef]
- Wu, C.; Zhao, Y.; Sun, M. Enhancing Low-Speed Sensorless Control of PMSM Using Phase Voltage Measurements and Online Multiple Parameter Identification. IEEE Trans. Power Electron. 2020, 35, 10700–10710. [Google Scholar] [CrossRef]
- Wang, Q.; Zhao, X.; Yang, P.; Hua, W.; Buja, G. Effects of Triangular Wave Injection and Current Differential Terms on Multiparameter Identification for PMSM. IEEE Trans. Power Electron. 2024, 39, 2943–2947. [Google Scholar] [CrossRef]
- Son, J.-C.; Lim, D.-K. Novel Method of Deriving Torque and Speed Curve of the Permanent Magnet Synchronous Motor Using Initial State Finite Element Analysis. IEEE Trans. Magn. 2022, 58, 8203906. [Google Scholar] [CrossRef]
- Wang, Q.; Zhao, N.; Wang, G.; Zhao, S.; Chen, Z.; Zhang, G.; Xu, D. An Offline Parameter Self-Learning Method Considering Inverter Nonlinearity with Zero-Axis Voltage. IEEE Trans. Power Electron. 2021, 36, 14098–14109. [Google Scholar] [CrossRef]
- Liu, Z.-H.; Wei, H.-L.; Zhong, Q.-C.; Liu, K.; Xiao, X.-S.; Wu, L.-H. Parameter Estimation for VSI-Fed PMSM Based on a Dynamic PSO with Learning Strategies. IEEE Trans. Power Electron. 2017, 32, 3154–3165. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, G.; Zhao, N.; Zhang, G.; Cui, Q.; Xu, D.G. An Impedance Model-Based Multiparameter Identification Method of PMSM for Both Offline and Online Conditions. IEEE Trans. Power Electron. 2021, 36, 727–738. [Google Scholar] [CrossRef]
- Rajwar, K.; Deep, K.; Das, S. An Exhaustive Review of the Metaheuristic Algorithms for Search and Optimization: Taxonomy, Applications, and Open Challenges. Artif. Intell. Rev. 2023, 56, 13187–13257. [Google Scholar] [CrossRef]
- Trojovsky, P.; Dehghani, M. A New Bio-Inspired Metaheuristic Algorithm for Solving Optimization Problems Based on Walruses Behavior. Sci. Rep. 2023, 13, 8775. [Google Scholar] [CrossRef]
- Pham, T.H.; Raahemi, B. Bio-Inspired Feature Selection Algorithms with Their Applications: A Systematic Literature Review. IEEE Access 2023, 11, 43733–43758. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, M.; Zhang, C.; Shen, A.; Bing, L. Identification of PMSM Parameters with Time-Error Compensated Based on Contractile Factor Anti-Predator PSO. IEEE Trans. Transp. Electrif. 2023, 10, 4006–4017. [Google Scholar] [CrossRef]
- Liu, Z.-H.; Wei, H.-L.; Li, X.-H.; Liu, K.; Zhong, Q.-C. Global Identification of Electrical and Mechanical Parameters in PMSM Drive Based on Dynamic Self-Learning PSO. IEEE Trans. Power Electron. 2018, 33, 10858–10871. [Google Scholar] [CrossRef]
- Xie, C.; Zhang, S.; Li, X.; Zhou, Y.; Dong, Y. Parameter Identification for SPMSM with Deadbeat Predictive Current Control Using Online PSO. IEEE Trans. Transp. Electrif. 2023, 10, 4055–4064. [Google Scholar] [CrossRef]
- Cen, Y.; Shen, H.; Wang, X.; Wu, Y.; Du, J. Multi-Objective Optimization Analysis of Electromagnetic Performance of Permanent Magnet Synchronous Motors Based on the PSO Algorithm. Energies 2024, 17, 4637. [Google Scholar] [CrossRef]
- Li, H.; Jian, X. Parameter Identification of Permanent Magnet Synchronous Motor Based on CGCRAO Algorithm. IEEE Access 2023, 11, 124319–124330. [Google Scholar] [CrossRef]
- Gierczynski, M.; Jakubowski, R.; Kupiec, E.; Niewiara, L.J.; Tarczewski, T.; Grzesiak, L.M. Identification of the Parameters of the Highly Saturated Permanent Magnet Synchronous Motor (PMSM): Selected Problems of Accuracy. Energies 2024, 17, 6096. [Google Scholar] [CrossRef]
- Zangbari Koohi, S.; Abdul Hamid, N.A.W.; Othman, M.; Ibragimov, G. Raccoon Optimization Algorithm. IEEE Access 2019, 7, 5383–5399. [Google Scholar] [CrossRef]
- Koohi, S.Z.; Hamid, N.A.W.A.; Othman, M.; Ibragimov, G. HATS: HetTask Scheduling. IEEE Trans. Cloud Comput. 2023, 11, 2071–2083. [Google Scholar] [CrossRef]
- Balamurugan, A.; Priya, M.D.; Malar, A.C.J.; Janakiraman, S. Raccoon Optimization Algorithm-Based Accurate Positioning Scheme for Reliable Emergency Data Dissemination under NLOS Situations in VANETs. J. Ambient Intell. Humaniz. Comput. 2021, 12, 10405–10424. [Google Scholar] [CrossRef]
- Koohi, S.Z.; Abdul Hamid, N.A.W.; Othman, M.; Ibragimov, G. ROA-CONS: Raccoon Optimization for Job Scheduling. Symmetry-Basel 2021, 13, 2270. [Google Scholar] [CrossRef]
- Marini, F.; Walczak, B. Particle Swarm Optimization (PSO). A Tutorial. Chemom. Intell. Lab. Syst. 2015, 149, 153–165. [Google Scholar] [CrossRef]
- Nadimi-Shahraki, M.H.; Zamani, H.; Mirjalili, S. Enhanced Whale Optimization Algorithm for Medical Feature Selection: A COVID-19 Case Study. Comput. Biol. Med. 2022, 148, 105858. [Google Scholar] [CrossRef]
- Holland, J.H. Genetic Algorithms and the Optimal Allocation of Trials. SIAM J. Comput. 1973, 2, 88–105. [Google Scholar] [CrossRef]
- Deng, L.; Liu, S. Snow Ablation Optimizer: A Novel Metaheuristic Technique for Numerical Optimization and Engineering Design. Expert Syst. Appl. 2023, 225, 120069. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Dimensionality | Minimum Value |
|---|---|---|
| 2 | 0.998 | |
| 4 | 0.0003075 | |
| 2 | −1.0316285 | |
| 2 | 0.398 | |
| 2 | 3 | |
| 3 | −3.86 | |
| 6 | −3.32 | |
| 4 | −10.153 | |
| 4 | −10.403 |
| Function | EROA | ROA | PSO | E_WOA | GA |
|---|---|---|---|---|---|
| 9.98 × 10−1 | 1.12 × 10+1 | 9.98 × 10−1 | 9.98 × 10−1 | 1.14 | |
| 4.91 × 10−4 | 5.29 × 10−3 | 6.33 × 10−4 | 5.01 × 10−4 | 1.06 × 10−2 | |
| −1.03 | −9.62 × 10−1 | −1.03 | −1.03 | −1.01 | |
| 3.98 × 10−1 | 4.42 × 10−1 | 3.98 × 10−1 | 3.98 × 10−1 | 6.61 × 10+1 | |
| 3.00 | 1.20 × 10+1 | 3.00 | 3.00 | 3.00 | |
| −3.86 | −3.33 | −3.86 | −3.86 | −3.46 | |
| −3.29 | −1.77 | −3.27 | −3.30 | −2.03 | |
| −9.65 | −5.25 | −8.13 | −8.62 | −1.67 | |
| −9.87 | −7.07 | −9.87 | −7.75 | −1.65 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| (Ω) | 2.35 | Rated Current (A) | 2.7 |
| (H) | 0.0265 | Rated Torque (N·m) | 1.27 |
| (Wb) | 0.0101 | Rated Speed (rpm) | 3000 |
| Pole Pairs | 4 | Rated Power (W) | 400 |
| Algorithm | (Ω) | (H) | (Wb) |
|---|---|---|---|
| Real Value | 2.35 | 0.0265 | 0.0101 |
| EROA | 2.3506 | 0.0264 | 0.0100 |
| EROA error (%) | 0.0256 | 0.5472 | 0.9527 |
| ROA | 2.3753 | 0.0176 | 0.0037 |
| ROA error (%) | 1.0750 | 33.5062 | 63.0814 |
| PSO | 2.3506 | 0.0263 | 0.0100 |
| PSO error (%) | 0.0269 | 0.6137 | 1.0772 |
| E_WOA | 2.3555 | 0.0248 | 0.0102 |
| E_WOA error (%) | 0.2323 | 6.3166 | 0.6497 |
| GA | 1.9989 | 0.2082 | 0.1258 |
| GA error (%) | 14.9384 | 685.7044 | 1145.9741 |
| WaOA | 2.3506 | 0.0264 | 0.0100 |
| WaOA error (%) | 0.0256 | 0.5472 | 0.9526 |
| SAO | 2.3506 | 0.0264 | 0.0100 |
| SAO error (%) | 0.0256 | 0.5472 | 0.9526 |
| EROA | (Ω) | (H) | (Wb) |
|---|---|---|---|
| Actual value | 2.35 | 0.0265 | 0.0101 |
| Maximum | 2.4105 | 0.0270 | 0.0107 |
| Minimum | 2.2752 | 0.0268 | 0.0094 |
| Average | 2.3425 | 0.0269 | 0.0100 |
| Average error/% | 0.3193 | 1.5064 | 0.6948 |
| EROA | (Ω) | (H) | (Wb) |
|---|---|---|---|
| Actual value | 2.35 | 0.0265 | 0.0101 |
| Maximum | 2.3986 | 0.0271 | 0.0114 |
| Minimum | 2.1886 | 0.0268 | 0.0095 |
| Average | 2.3136 | 0.0269 | 0.0103 |
| Average error/% | 1.5480 | 1.6241 | 1.7775 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Z.; Zhan, J.; Li, Z.; Hou, X.; Fu, Z.; Yang, X. Enhanced Raccoon Optimization Algorithm for PMSM Electrical Parameter Identification. Energies 2025, 18, 869. https://doi.org/10.3390/en18040869
Hu Z, Zhan J, Li Z, Hou X, Fu Z, Yang X. Enhanced Raccoon Optimization Algorithm for PMSM Electrical Parameter Identification. Energies. 2025; 18(4):869. https://doi.org/10.3390/en18040869
Chicago/Turabian StyleHu, Zhihong, Jihao Zhan, Zelan Li, Xiangqing Hou, Zhiang Fu, and Xiaoliang Yang. 2025. "Enhanced Raccoon Optimization Algorithm for PMSM Electrical Parameter Identification" Energies 18, no. 4: 869. https://doi.org/10.3390/en18040869
APA StyleHu, Z., Zhan, J., Li, Z., Hou, X., Fu, Z., & Yang, X. (2025). Enhanced Raccoon Optimization Algorithm for PMSM Electrical Parameter Identification. Energies, 18(4), 869. https://doi.org/10.3390/en18040869