2.1. Experimental Stand
The steam turbogenerator unit STGU-JRT-475-24/0.5 and a pilot-scale experimental test bench were developed and manufactured at LLC “UKRNAFTOZAPCHASTYNA” (Sumy, Ukraine). The test bench was installed at PJSC “SUMYKHIMPROM” (Sumy, Ukraine).
Figure 1 and
Figure 2 show the external view of the test bench and its schematic diagram, respectively.
The main components of the test bench include
steam and air supply pipelines;
the pipeline system of the bench, along with shut-off and control valves;
a flowmeter;
a steam turbogenerator unit (STGU) based on a JRT;
an electric generator;
an information and measurement system for recording the working fluid flow rate, active electrical power, rotor speed, and the pressures and temperatures at the inlet and outlet of the unit.
Waste-heat boilers generate steam in the furnace section of the sulfuric acid department at PJSC “SUMYKHIMPROM” with the following parameters: pressure—4 MPa, temperature—450 °C. The steam is delivered through a supply pipeline to a hand regulating device (HRD), where water is injected to reduce the steam parameters to a pressure of up to 2.43 MPa and a temperature of up to 350 °C. The working fluid then flows through a flowmeter and into the regulating nozzles of the STGU. These nozzles regulate the steam’s mass flow rate before it enters the axial channel of the JRT, which consists of a cylindrical axial section and a diffuser section. Inside the axial channel of the rotor, the steam flow decelerates as it passes through a shock wave to subsonic speed. It continues to move through the flow path at a low velocity and with minimal energy losses until it reaches the thrust nozzles. The steam exits these nozzles at supersonic speed, generating reactive thrust and torque on the turbine shaft. Mechanical work is performed as the shaft rotates.
The STGU-JRT-475-24/0.5 is a base model for a series of steam turbogenerator units using JRTs with capacities of 160, 250, 315, and 475 kW. These units are designed to generate electricity by converting the potential energy of steam pressure released during expansion in the JRT into mechanical energy on the generator shaft, and subsequently into electrical power.
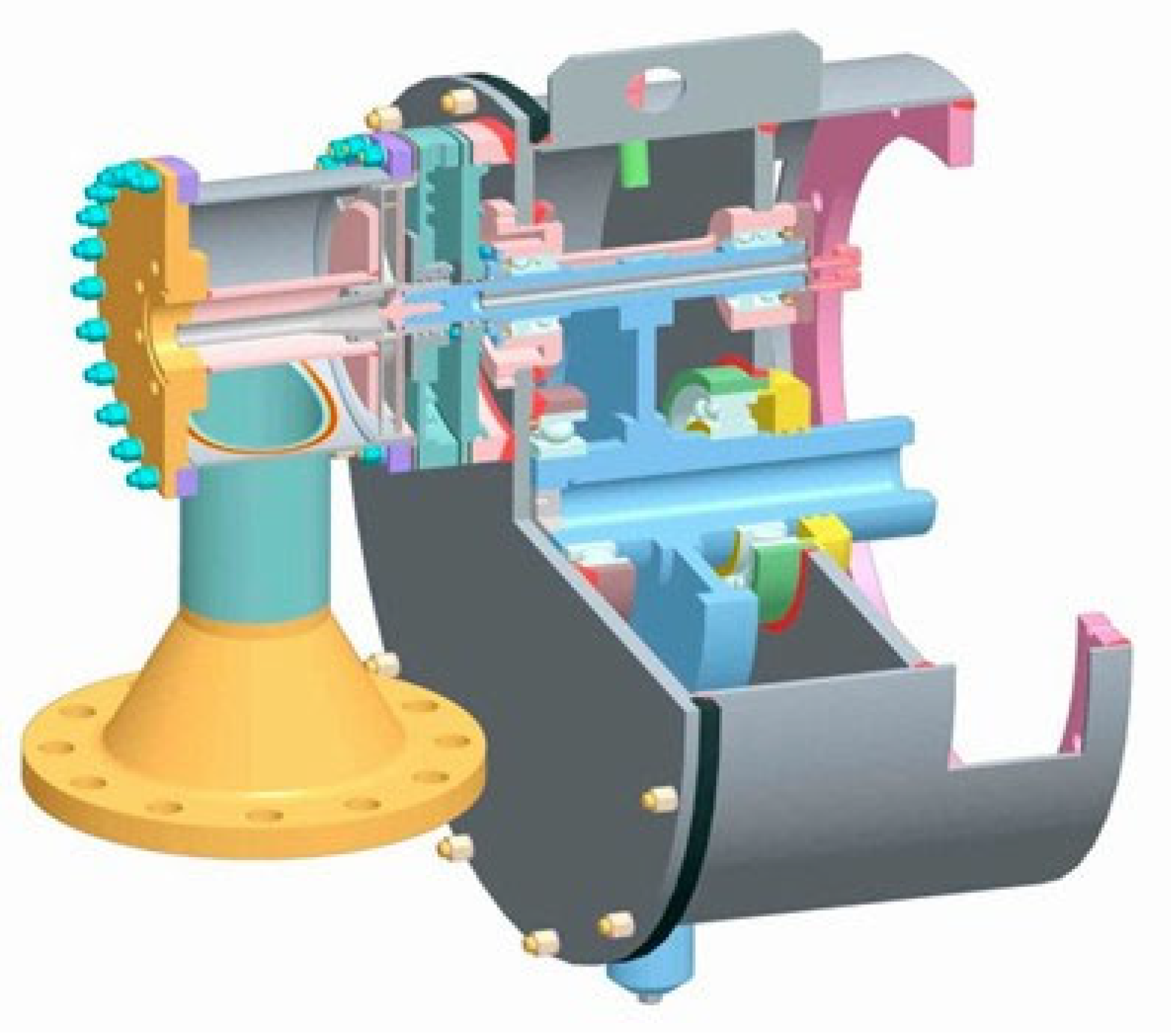
The STGU-JRT-475-24/0.5 features two JRTs, each rated at 250 kW, mounted in parallel, and connected to a single 475 kW electric generator (400 V, 50 Hz) via a single-stage gear reducer. The 3D models and a general cross-sectional view of the JRT and the gear reducer are shown in
Figure 3 and
Figure 4.
The output shaft of the gear reducer connects to a generator with a rated power of 475 kW. The exhaust steam is directed to a deaerator or discharged into the atmosphere during emergencies. The experimental test bench has a compressed air supply system for purging.
A set of control and computational instruments was installed to obtain measurement data on the operating parameters of the STGU and monitor its condition. This system enables
real-time monitoring of all test bench systems;
measurement of total power output of generated electrical energy;
recording and storage of measurement data;
graphical representation of measured parameters.
The test bench has sensors for monitoring pressure, temperature, generator rotational speed, electrical power output, and vibration levels.
All necessary parameters were measured during the experimental studies, including the pressures and temperatures required for conducting numerical simulations and validating their results (
Table 1).
The electrical parameters of the generator monitors are measured using the multifunctional device SATEC PM130P and the “Indigo+” electric energy meter. The SATEC PM130P is a three-phase instrument designed to measure the main electrical network parameters and record and store data.
Table 2 lists the measured electrical parameters and their measurement ranges.
The shaft rotational speed of the generator was monitored using the tachometric transducer IT14.14.000, which has a measurement range from 0 to 5000 rpm and a measurement error of 1%.
Before the commencement of testing, the availability of the following documents was verified:
a certificate of quality or calibration certificate for all instruments;
a readiness report for the industrial test bench, including assessment of installation feasibility;
quality control department acceptance reports for the STGU-JRT-475-24/0.5 and its assembly units;
test protocols for the electrical systems and equipment of the STGU-JRT-475-24/0.5, conducted after its installation on the pilot-scale industrial test bench;
Test protocols for the instrumentation and control equipment of the STGU-JRT-475-24/0.5 after installation.
Testing was carried out according to the developed program and methodology for preliminary tests of the STGU-JRT-475-24/0.5.
The design specifications of the unit for the nominal operating mode are as follows:
inlet steam gauge pressure to the JRT: 2.43 MPa;
inlet steam temperature to the JRT: 350 °C;
outlet steam gauge pressure from the JRT: 0.05 MPa;
steam mass flow rate: 7.8 t/h;
electrical power: 475 kW.
The unit operated at modes of up to 505 kW during testing. The unit’s operating parameters (pressure and temperature) remained within permissible ranges in all operating modes. The vibration and temperature conditions of the bearings were within normal limits.
The errors of direct measurements are classified as systematic or random. To reduce random errors, a series of repeated measurements was performed. Systematic errors include instrumental, positional, and subjective components. Positional errors were minimised by adhering to the manufacturer’s installation guidelines for instruments and equipment. Instrumental errors are determined by the accuracy class and resolution of the instruments, as well as compliance with operational procedures. Subjective errors were mitigated by having multiple researchers repeat the measurements independently.
When processing the test results and determining the uncertainty of indirect measurements, it was assumed that the distribution of measurement errors follows a customary (Gaussian) law. This assumption is justified since indirect measurements are functions of multiple independent variables. According to the central limit theorem, if the total error arises from the combined effect of many independent factors, each contributing only marginally to the overall uncertainty, their cumulative effect can be approximated by a normal distribution.
Multiple measurements were taken for each monitored quantity during testing. The arithmetic mean was then calculated, for example, for the gas pressure at the inlet to the JRT:
Then, the root mean square error of the measurement result was calculated as
where
is error of the i-th measurement, and
n is the number of measurements.
The absolute error of the indirect measurement result was determined using the following equation:
The relative error of the result of the indirect measurement was then calculated as
or
The processing of test results was carried out in accordance with the developed and approved methodology titled “Test Results of STGU-JRT-475-24/0.5 and Their Processing”, prepared by specialists from LLC “UKRNAFTOZAPCHASTYNA”.
According to the developed and approved test program and methodology, only data obtained under stable operating conditions of the unit over an agreed-upon period of time were accepted for processing. This corresponded to the regime with an output power of 404 kW.
An operating mode with a power output of 404 kW was selected for comparison with the numerical modelling results. For this mode,
inlet steam gauge pressure to the JRT: 1.8224 MPa;
inlet steam temperature to the JRT: 275.5 °C;
outlet steam gauge pressure from the JRT: 0 Pa;
outlet steam temperature: 146.4 °C.
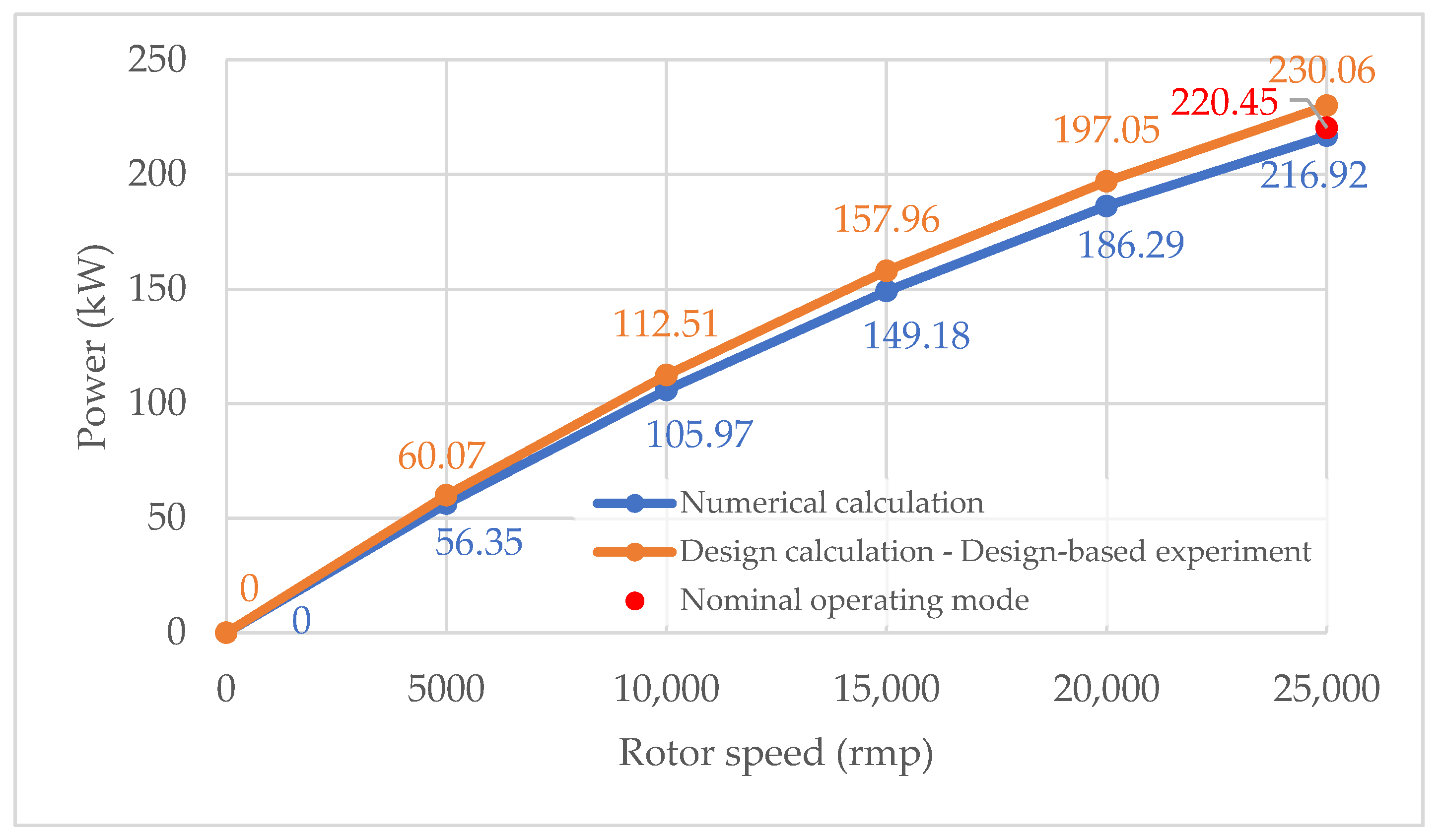
In this mode, the electrical power of the STGU was 404 kW, the steam mass flow rate was 7.577 t/h, and the JRT rotor speed was 25,000 rpm.
2.2. Numerical Simulations
Numerical simulation of steam flow within the flow path of the JRT was performed using the ANSYS CFX software package.
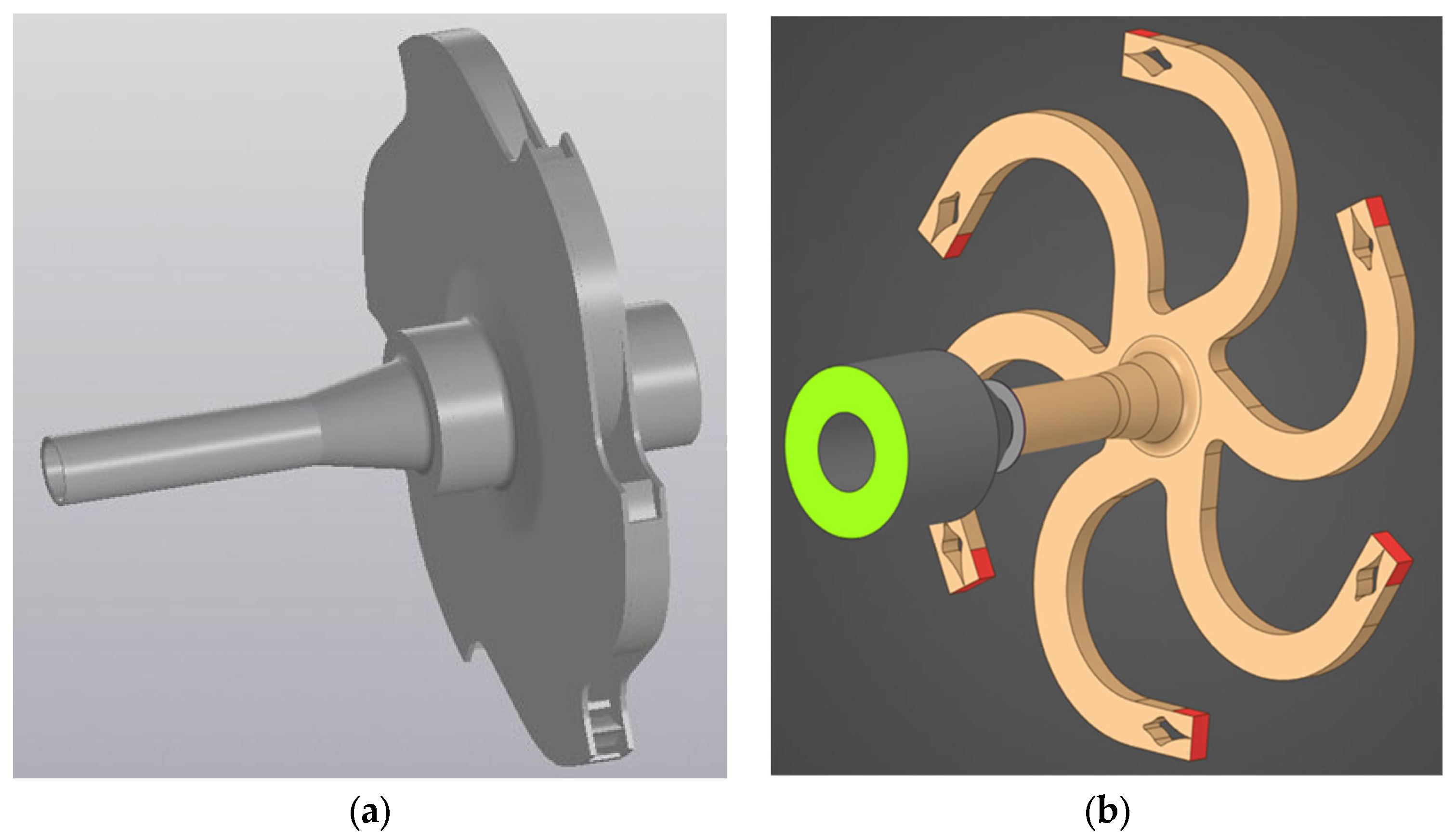
A solid 3D model of the JRT impeller is shown in
Figure 5a. The three-dimensional model of the computational domain of the investigated sample represents the internal volume of the JRT flow passage and is shown in
Figure 5b. The domain is divided into stator and rotor regions, with a clearance gap separating them. The stator region is bounded at the inlet by a supply sleeve (green area in
Figure 5b), while the rotor region begins downstream of the nozzle section of the rotor wheel (red areas in
Figure 5b).
The overall geometric dimensions of the computational domain, which represent the actual dimensions of the JRT, are provided in
Table 3.
A hybrid computational mesh was generated for the simulations, combining various types of elements selected based on the geometric complexity of different regions and the required modelling accuracy [
14,
15]. The mesh includes the following cell types:
Tetrahedral elements: These four-faced elements are suitable for complex and irregular geometries. They provide high accuracy for domains with substantial shape variations, particularly in 3D geometries featuring numerous surfaces and edges.
Wedge (prismatic) cells: These five-faced elements, composed of two triangular and three quadrilateral faces, are commonly used for simulating wedge-shaped regions. They effectively capture flow parameter variations in expanding or contracting channel sections.
Pyramidal cells: These elements, also five-faced, are typically applied in transition zones between regions with different element types. They ensure a smooth transition between fine and coarse mesh areas, which is crucial for capturing flow gradients in critical zones, such as peripheral regions or areas with steep velocity and pressure changes.
Mesh refinement was applied in the boundary layer regions to enhance calculation accuracy (
Figure 6a,b). It allowed for more accurate resolution of temperature, pressure, and velocity gradients near the domain walls. Additional local mesh refinement was applied around the thrust nozzles of the impeller (
Figure 6c) to better capture the flow characteristics in this critical region. Furthermore, mesh densification was implemented in the clearance gap between the stator and rotor (
Figure 6d).
Before initiating the numerical simulations, a mesh independence study was conducted to evaluate the effect of mesh resolution on result accuracy. Simulations were performed using four different mesh configurations with varying element counts, as presented in
Table 4. As shown in
Table 4, the four mesh variants ranged in total element count from 5.482 million to 21.627 million. Simulations using these variants yielded results of sufficient accuracy. However, as the mesh density increased, so did the computational complexity, potentially introducing additional numerical errors and significantly increasing the computation time.
The relative error of the mass flow rate and torque value was used to analyse the independence of the results from mesh quality. The input data for configuring the simulations were based on results obtained during full-scale experimental tests, which also enabled the evaluation of discrepancies between numerical and experimental torque values. Additional parameters to assess mesh independence included dimensionless mesh quality indicators: Min. Y+ value, Min Mesh Quality, and Average Orthogonal Quality.
As shown in
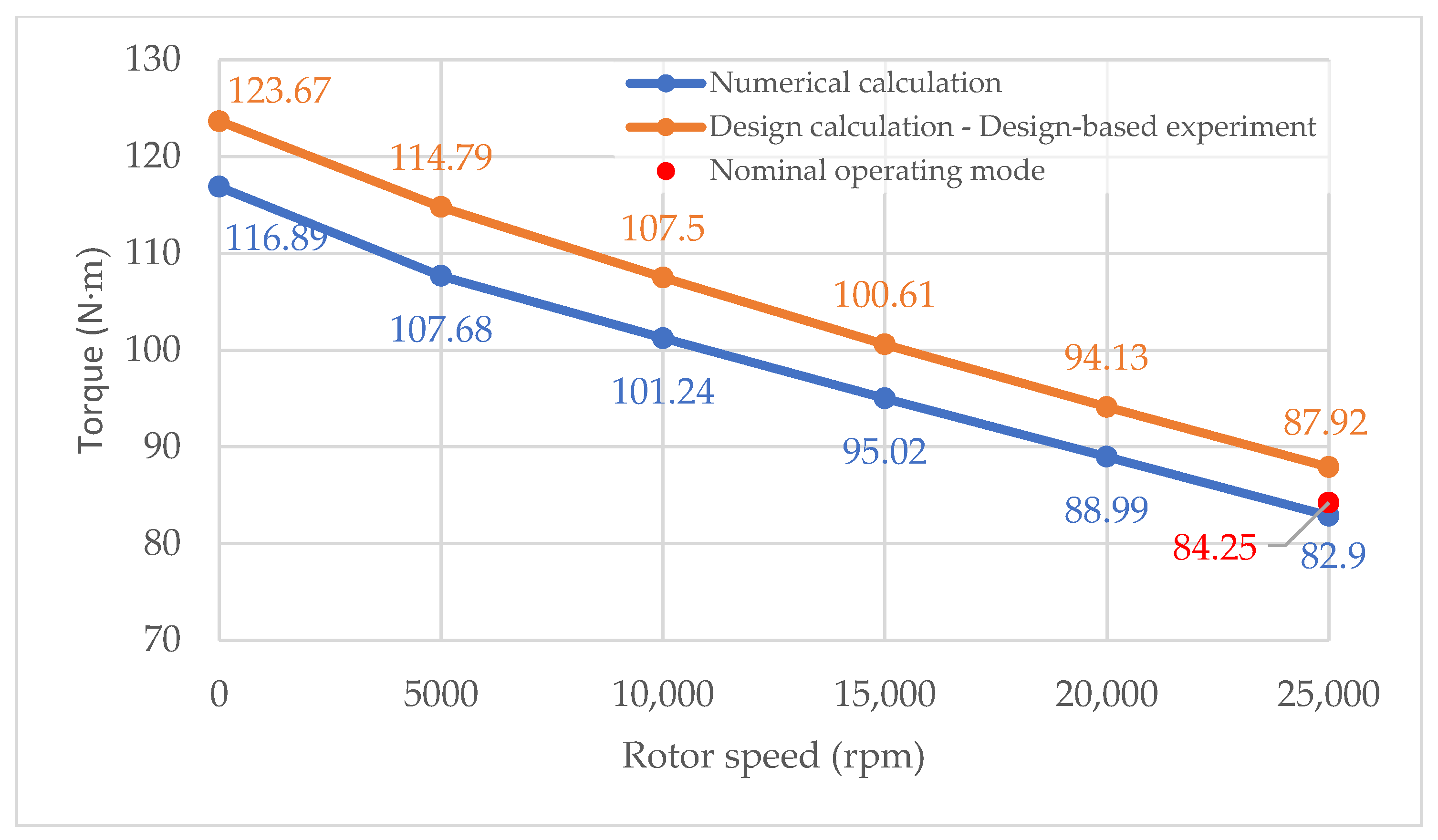
Table 4, the largest error in the calculated mass flow rate is observed for mesh variant 1, while the smallest errors are seen for variants 3 and 4. These variants also produce torque values closest to the experimental result (84.25 N·m), with a deviation not exceeding 1.6%. Additionally, for variants 3 and 4, the Min. Y
+ value is less than 2, which is the lowest among all mesh configurations. The Average Orthogonal Quality exceeds 0.75, indicating high mesh quality.
For subsequent simulations, the mesh corresponding to Experiment No. 3 was selected, providing a mass flow rate error of 0.56% and a torque deviation of 1.6%. These values fall within the acceptable error margin and ensure an optimal balance between model accuracy and computational efficiency.
Detailed information about the computational mesh of the model is provided in
Table 5.
The CFD simulation process comprises three main stages: pre-processing, processing, and post-processing. During the pre-processing stage, the computational domain is defined, and the input parameters for the simulation are specified, as summarised in
Table 6. The numerical solution was carried out using ANSYS CFX software, while the CFD-Post module was used for post-processing and visualisation of the results.
Information about the thermophysical properties of the working fluid under initial conditions is provided in
Table 7.
The use of the “Total Energy” heat transfer model enables accurate consideration of variations in density, temperature, and pressure typical of compressible flow.
The shear stress transport (SST) turbulence model was employed in this numerical study. This model combines the strengths of the k-ε and k-ω models to provide high accuracy in modelling the boundary layer. The SST model is particularly effective in predicting flow separation under adverse pressure gradients where turbulent flow dominates. By blending the two base models, SST accurately captures the entire boundary layer behaviour from the near-wall region to the outer edge. Moreover, it incorporates the Bradshaw assumption to improve separation prediction [
16]. Its well-documented reliability and high accuracy justify the selection of the SST turbulence model in this study in simulating complex turbulent flows in turbomachinery, as well as its proven ability to accurately capture flow separation phenomena—a critical factor in hydrodynamic analysis of turbocompressors and other energy systems [
17,
18,
19,
20]. Its implementation enables the reliable prediction of flow behaviour, thereby enhancing the credibility of the simulation results for further analysis and design optimisation.
Moreover, in this study, a two-phase model is not required, as the steam remains superheated throughout the entire flow path of the turbine above the saturation point.
Following the results of the full-scale JRT tests described in
Section 2, the boundary condition settings used in the simulation are provided in
Table 8.

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}