A Novel Back Propagation Neural Network Based on the Harris Hawks Optimization Algorithm for the Remaining Useful Life Prediction of Lithium-Ion Batteries

 ,
,
Abstract

1. Introduction
2. Methodology
2.1. The Principle of the HHO Algorithm
2.1.1. Exploration Phase
2.1.2. Switch Between Exploration and Exploitation Phases
2.1.3. Exploitation Phase
- (1)
- Soft besiege
- (2)
- Hard besiege
- (3)
- Soft besiege with progressive rapid dives
- (4)
- Hard besiege with progressive rapid dives
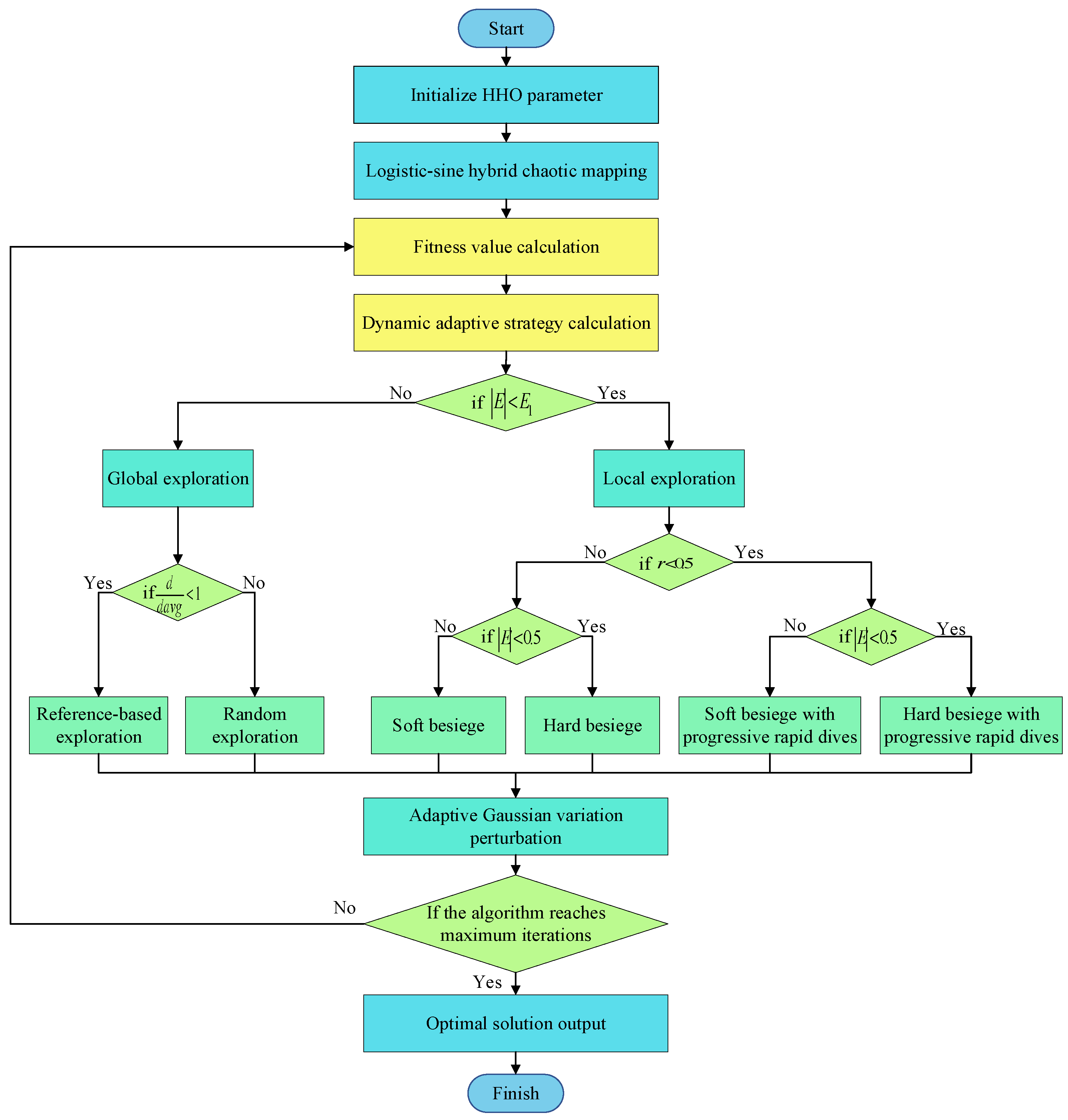
2.2. The Optimization of the HHO Algorithm
2.2.1. Circle Chaotic Mapping
2.2.2. Dynamic Adaptive Escape Energy
2.2.3. Improvement of Exploration Phase
2.2.4. Adaptive Mutation Strategy
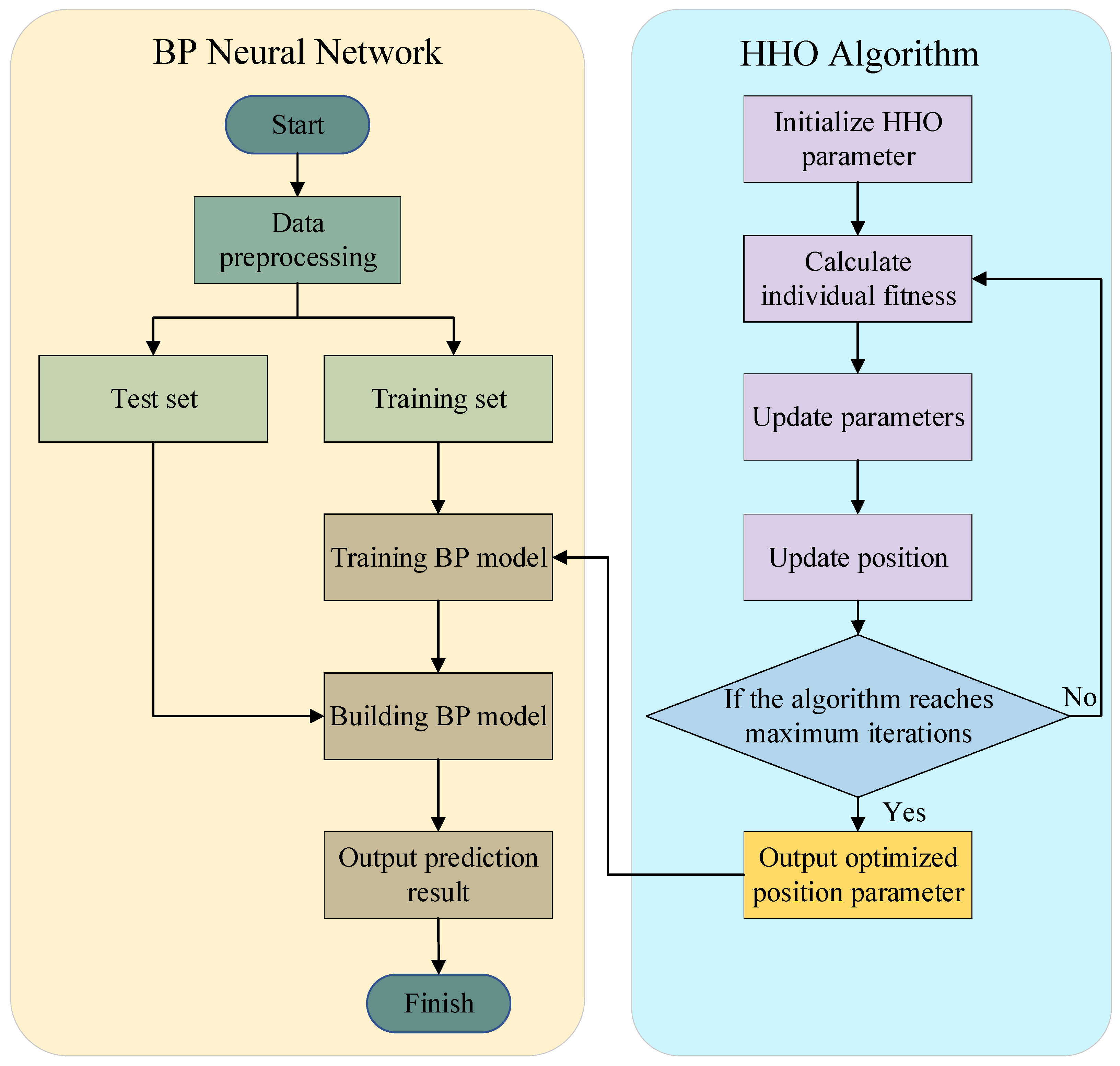
2.3. BP Neural Network Based on the Novel HHO Algorithm
3. Experiment
3.1. Evaluation of Health Factors
- (1)
- Determine the analysis series: Designate the battery capacity as the reference sequence , and the extracted health factors as the comparative sequences ;
- (2)
- Calculate the correlation coefficients:where is resolution coefficient and usually set to 0.5;
- (3)
- Calculate the correlation degrees.
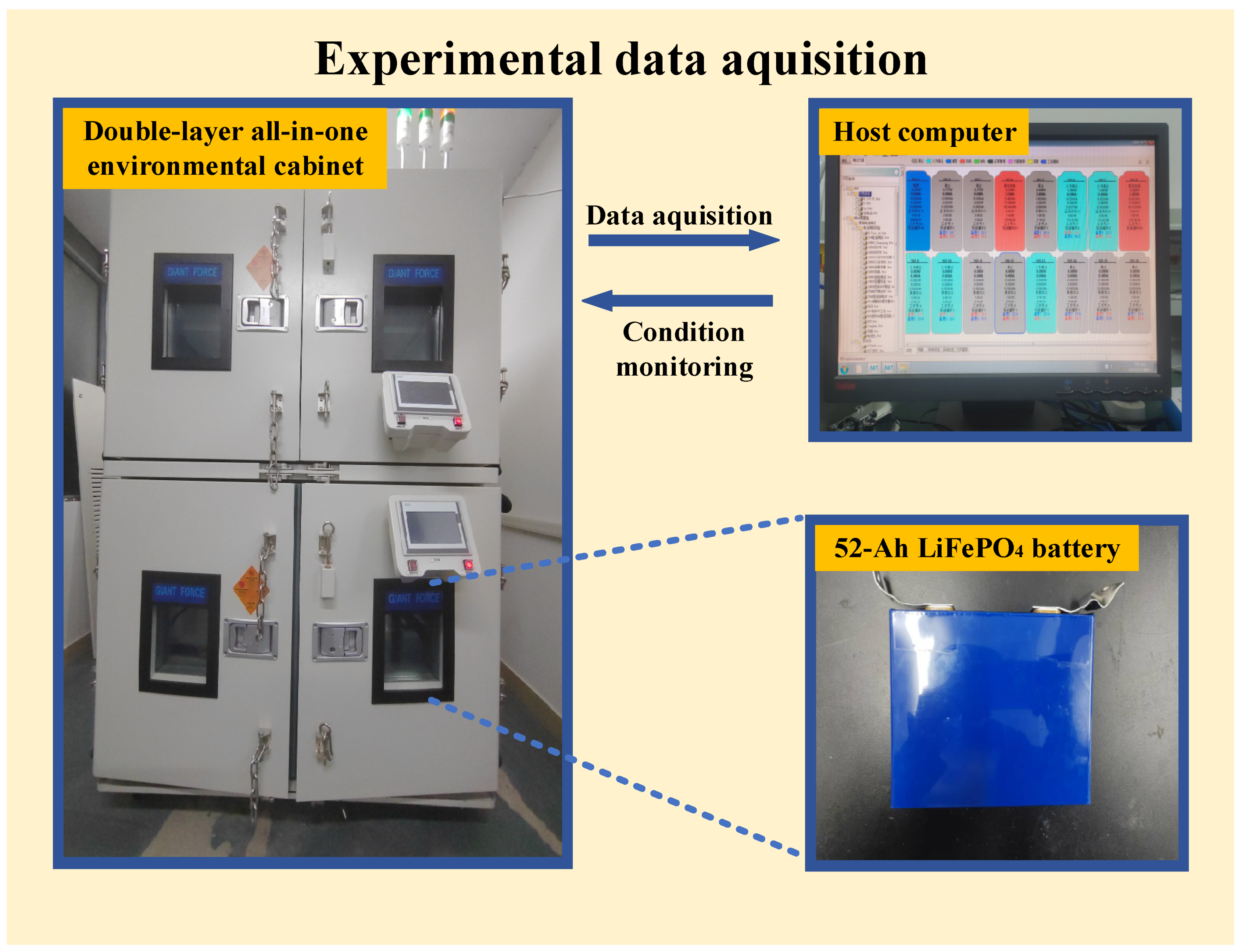
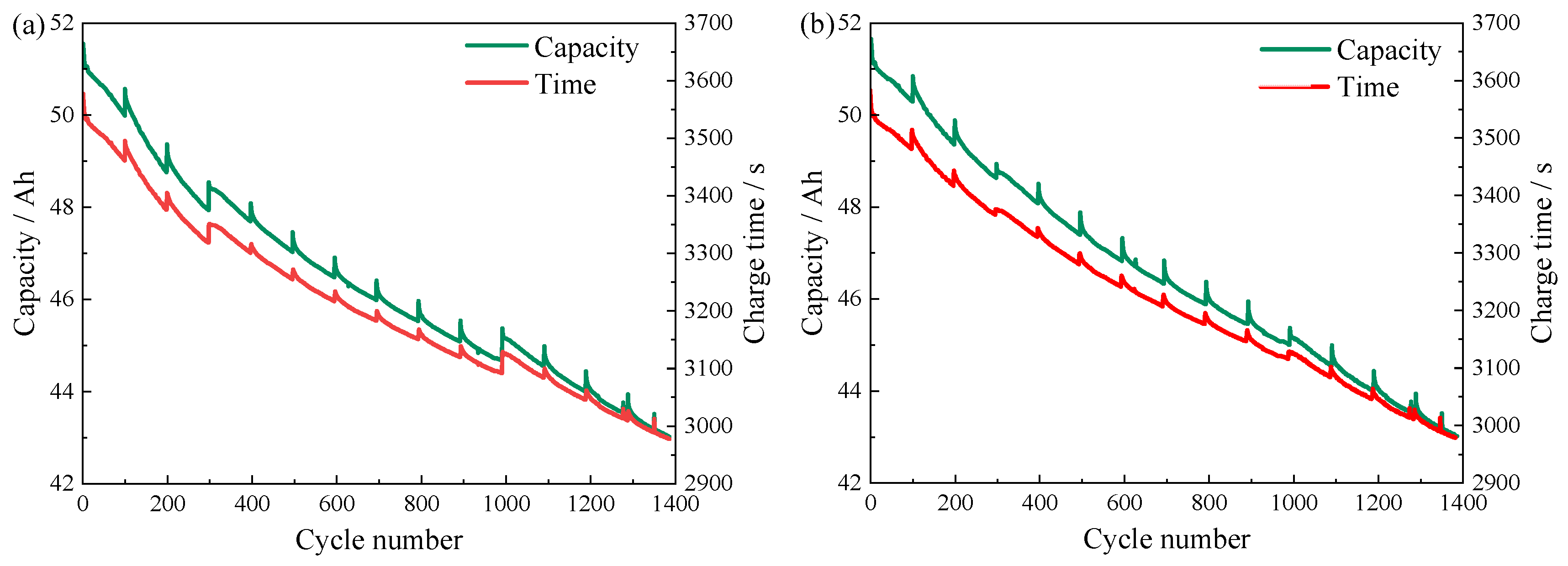
3.2. Battery Aging Data and Health Factor Extraction
3.3. RUL Prediction Process
4. Results and Discussion
4.1. Verification Setup
4.2. Experimental Result Analysis
5. Conclusions
- (1)
- Four optimization strategies are introduced, significantly enhancing both the optimization efficiency and prediction accuracy compared to conventional methods. Specifically, circle chaotic mapping is employed to enhance global search capability. Meanwhile, a dynamic adaptive escape energy mechanism improves convergence speed and stability. Furthermore, an improved exploration phase decision strategy optimizes path selection, thereby increasing convergence accuracy. Lastly, an adaptive mutation strategy enhances adaptability to complex nonlinear problems of the model.
- (2)
- Using gray relational analysis, the correlations between battery capacity and two critical health indicators, namely charging and discharging time during the same voltage range at the constant current, are quantified, both yielding correlation coefficients greater than 0.95. Employing these indicators as input features effectively addresses practical challenges associated with direct battery capacity measurement, significantly enhancing virtual applicability.
- (3)
- Comparative experiments utilizing training datasets comprising 50%, 60%, and 70% of battery cycling data confirm the robustness and high accuracy of the proposed model. The results demonstrate the MAE values consistently maintain below 0.012, RMSE values keep below 0.017, and MAPE preserve within 0.95%. Compared to existing benchmark models, the proposed approach offers substantial advantages in accuracy, robustness, and generalization capability.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhu, Z.; Chai, X.; Xu, L.; Quan, L.; Yuan, C.; Tian, S. Design and performance of a distributed electric drive system for a series hybrid electric combine harvester. Biosyst. Eng. 2023, 236, 160–174. [Google Scholar] [CrossRef]
- Zhu, Z.; Zeng, L.; Chen, L.; Zou, R.; Cai, Y. Fuzzy Adaptive Energy Management Strategy for a Hybrid Agricultural Tractor Equipped with HMCVT. Agriculture 2022, 12, 1986. [Google Scholar] [CrossRef]
- Sun, H.; Jiang, H.; Gu, Z.; Li, H.; Wang, T.; Rao, W.; Wang, Y.; Pei, L.; Yuan, C.; Chen, L. A novel multiple kernel extreme learning machine model for remaining useful life prediction of lithium-ion batteries. J. Power Sources 2024, 613, 234912. [Google Scholar] [CrossRef]
- Li, T.; Jiao, Y. Revealing the Thermal Runaway Behavior of Lithium Iron Phosphate Power Batteries at Different States of Charge and Operating Environment. Int. J. Electrochem. Sci. 2022, 17, 221030. [Google Scholar] [CrossRef]
- Zuo, H.; Liang, J.; Zhang, B.; Wei, K.; Zhu, H.; Tan, J. Intelligent estimation on state of health of lithium-ion power batteries based on failure feature extraction. Energy 2023, 282, 128794. [Google Scholar] [CrossRef]
- Demirci, O.; Taskin, S.; Schaltz, E.; Demirci, B.A. Review of battery state estimation methods for electric vehicles-Part II: SOH estimation. J. Energy Storage 2024, 96, 112703. [Google Scholar] [CrossRef]
- Liu, Y.; Tian, Y.; Liu, D.; Li, H.; Yi, A.; Wang, Y.; Wang, N.; Pei, L.; Wang, Z.; Jiang, H. A novel dual gated recurrent unit neural network based on error compensation integrated with Kalman filter for the state of charge estimation of parallel battery modules. J. Power Sources 2025, 635, 236508. [Google Scholar] [CrossRef]
- Zhang, F.; Xu, Z.X.; Wang, M.H. State of health estimation for Li-ion battery using characteristic voltage intervals and genetic algorithm optimized back propagation neural network. J. Energy Storage 2023, 57, 106277. [Google Scholar] [CrossRef]
- Wang, S.; Takyi-Aninakwa, P.; Fan, Y.; Yu, C.; Jin, S.; Fernandez, C.; Stroe, D.-I. A novel feedback correction-adaptive Kalman filtering method for the whole-life-cycle state of charge and closed-circuit voltage prediction of lithium-ion batteries based on the second-order electrical equivalent circuit model. Int. J. Electr. Power Energy Syst. 2022, 139, 108020. [Google Scholar] [CrossRef]
- Bian, X.; Wei, Z.G.; Li, W.; Pou, J.; Sauer, D.U.; Liu, L. State-of-Health Estimation of Lithium-ion Batteries by Fusing an Open-Circuit-Voltage Model and Incremental Capacity Analysis. IEEE Trans. Power Electron. 2021, 37, 2226–2236. [Google Scholar] [CrossRef]
- Bartlett, A.; Marcicki, J.; Onori, S.; Rizzoni, G.; Yang, X.G.; Miller, T. Electrochemical Model-Based State of Charge and Capacity Estimation for a Composite Electrode Lithium-Ion Battery. IEEE Trans. Control Syst. Technol. 2015, 24, 384–399. [Google Scholar] [CrossRef]
- Qiang, H.; Zhang, W.; Ding, K. A Prediction Framework for State of Health of Lithium-Ion Batteries Based on Improved Support Vector Regression. J. Electrochem. Soc. 2023, 170, 110517. [Google Scholar] [CrossRef]
- Maures, M.; Capitaine, A.; Delétage, J.-Y.; Vinassa, J.-M.; Briat, O. Lithium-ion battery SoH estimation based on incremental capacity peak tracking at several current levels for online application. Microelectron. Reliab. 2020, 114, 113798. [Google Scholar] [CrossRef]
- Chen, Z.; Zhao, H.; Zhang, Y.; Shen, S.; Shen, J.; Liu, Y. State of health estimation for lithium-ion batteries based on temperature prediction and gated recurrent unit neural network. J. Power Sources 2022, 521, 230892. [Google Scholar] [CrossRef]
- Ahmed, S.; Qiu, B.; Ahmad, F.; Kong, C.-W.; Xin, H. A State-of-the-Art Analysis of Obstacle Avoidance Methods from the Perspective of an Agricultural Sprayer UAV’s Operation Scenario. Agronomy 2021, 11, 1069. [Google Scholar] [CrossRef]
- Feng, H.; Yan, H. State of health estimation of large-cycle lithium-ion batteries based on error compensation of autoregressive model. J. Energy Storage 2022, 52, 104869. [Google Scholar] [CrossRef]
- Chen, Z.; Xue, Q.; Xiao, R.; Liu, Y.; Shen, J. State of Health Estimation for Lithium-ion Batteries Based on Fusion of Autoregressive Moving Average Model and Elman Neural Network. IEEE Access 2019, 7, 102662–102678. [Google Scholar] [CrossRef]
- Patil, M.A.; Tagade, P.; Hariharan, K.S.; Kolake, S.M.; Song, T.; Yeo, T.; Doo, S. A novel multistage Support Vector Machine based approach for Li ion battery remaining useful life estimation. Appl. Energy 2015, 159, 285–297. [Google Scholar] [CrossRef]
- Xue, Q.; Li, J.; Xu, P. Machine learning based swift online capacity prediction of lithium-ion battery through whole cycle life. Energy 2022, 261, 125210. [Google Scholar] [CrossRef]
- Yang, H.; Wang, P.; An, Y.; Shi, C.; Sun, X.; Wang, K.; Zhang, X.; Wei, T.; Ma, Y. Remaining useful life prediction based on denoising technique and deep neural network for lithium-ion capacitors. eTransportation 2020, 5, 100078. [Google Scholar] [CrossRef]
- Ma, Y.; Yao, M.; Liu, H.; Tang, Z. State of Health estimation and Remaining Useful Life prediction for lithium-ion batteries by Improved Particle Swarm Optimization-Back Propagation Neural Network. J. Energy Storage 2022, 52, 104750. [Google Scholar] [CrossRef]
- Liu, Q.; Shang, Z.; Lu, S.; Liu, Y.; Liu, Y.; Yu, S. Physics-guided TL-LSTM network for early-stage degradation trajectory prediction of lithium-ion batteries. J. Energy Storage 2022, 106, 114736. [Google Scholar] [CrossRef]
- Lu, S.; Gao, Z.-W.; Liu, Y. HFTL-KD: A new heterogeneous federated transfer learning approach for degradation trajectory prediction in large-scale decentralized systems. Control Eng. Pract. 2024, 153, 106098. [Google Scholar] [CrossRef]
- Shi, C.; Zhu, D.; Zhang, L.; Song, S.; Sheldon, B.W. Transfer learning prediction on lithium-ion battery heat release under thermal runaway condition. Nano Res. Energy 2024, 3, e9120147. [Google Scholar] [CrossRef]
- Wen, J.; Chen, X.; Li, X.; Li, Y. SOH prediction of lithium battery based on IC curve feature and BP neural network. Energy 2022, 261, 125234. [Google Scholar] [CrossRef]
- Sun, J.; Kainz, J. State of health estimation for lithium-ion batteries based on current interrupt method and genetic algorithm optimized back propagation neural network. J. Power Sources 2024, 591, 233842. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Birogul, S. Hybrid Harris Hawk Optimization Based on Differential Evolution (HHODE) Algorithm for Optimal Power Flow Problem. IEEE Access 2019, 7, 184468–184488. [Google Scholar] [CrossRef]
- Fu, W.; Shao, K.; Tan, J.; Wang, K. Fault Diagnosis for Rolling Bearings Based on Composite Multiscale Fine-Sorted Dispersion Entropy and SVM With Hybrid Mutation SCA-HHO Algorithm Optimization. IEEE Access 2020, 8, 13086–13104. [Google Scholar] [CrossRef]
- Attiya, I.; Elaziz, M.A.; Xiong, S. Job Scheduling in Cloud Computing Using a Modified Harris Hawks Optimization and Simulated Annealing Algorithm. Comput. Intell. Neurosci. 2020, 2020, 3504642. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Wang, S.; Zhou, J.; Qiao, J. A Novel BCRLS-BP-EKF Method for the State of Charge Estimation of Lithium-ion Batteries. Int. J. Electrochem. Sci. 2022, 17, 220431. [Google Scholar] [CrossRef]
- Zhang, L.; Xing, B.; Gao, Y.; Yao, L.; Zhao, D.; Ding, J.; Li, Y. Data-Driven Prediction Methods for Lithium-Ion Battery State of Health Based on Elbow Rule. IEEE Access 2024, 12, 183581–183595. [Google Scholar] [CrossRef]
- Park, K.; Choi, Y.; Choi, W.J.; Ryu, H.-Y.; Kim, H. LSTM-Based Battery Remaining Useful Life Prediction With Multi-Channel Charging Profiles. IEEE Access 2020, 8, 20786–20798. [Google Scholar] [CrossRef]
- Rao, K.D.; Ramakrishna, A.; Ramesh, M.; Koushik, P.; Dawn, S.; Pavani, P.; Ustun, T.S.; Cali, U. A Hyperparameter-Tuned LSTM Technique-Based Battery Remaining Useful Life Estimation Considering Incremental Capacity Curves. IEEE Access 2024, 12, 127259–127271. [Google Scholar] [CrossRef]
- Ma, Y.; Li, J.; Hu, Y.; Chen, H. A Battery Prognostics and Health Management Technique Based on Knee Critical Interval and Linear Complexity Self-Attention Transformer in Electric Vehicles. IEEE Trans. Intell. Transp. Syst. 2024, 25, 10216–10230. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value/Composition |
|---|---|
| Geometric dimensions L × W × H (mm × mm × mm) | 148 × 27 × 115 |
| Rated voltage/V | 3.2 |
| Rated capacity/Ah | 52 |
| Operating Voltage/V | 2.5~3.65 |
| Anode | Graphite |
| Cathode | LiFePO4 |
| Variable | B1 Charging Time/s | B1 Discharging Time/s | B2 Charging Time/s | B2 Discharging Time/s |
|---|---|---|---|---|
| GRA | 0.954 | 0.954 | 0.951 | 0.951 |
| Variable | B1 Charging Time/s | B1 Discharging Time/s | B2 Charging Time/s | B2 Discharging Time/s |
|---|---|---|---|---|
| 0.99 | 0.99 | 0.99 | 0.99 | |
| RMSE | 0.028 | 0.0042 | 0.026 | 0.0069 |
| Optimization Scheme | Model Name |
|---|---|
| Scheme 1 | N1 |
| Scheme 1 and Scheme 2 | N2 |
| Scheme 1, Scheme 2, and Scheme 3 | N3 |
| Full optimization | N4 |
| Battery | Training Set | Model | RMSE | MAPE | MAE | Run Time/s |
|---|---|---|---|---|---|---|
| B1 | 70% | BP | 0.0649 | 0.0282 | 0.0467 | 6.115 |
| HHO–BP | 0.0575 | 0.0261 | 0.0411 | 287.120 | ||
| N1 | 0.0404 | 0.0273 | 0.0341 | 276.670 | ||
| N2 | 0.0279 | 0.0165 | 0.0187 | 292.691 | ||
| N3 | 0.0273 | 0.0137 | 0.0231 | 227.668 | ||
| N4 | 0.0164 | 0.0044 | 0.0114 | 231.555 | ||
| 60% | BP | 0.0884 | 0.0507 | 0.0375 | 6.002 | |
| HHO–BP | 0.0684 | 0.0315 | 0.0289 | 291.332 | ||
| N1 | 0.0436 | 0.0236 | 0.0242 | 256.989 | ||
| N2 | 0.0331 | 0.0259 | 0.0161 | 236.518 | ||
| N3 | 0.0262 | 0.0142 | 0.0106 | 243.107 | ||
| N4 | 0.0095 | 0.0089 | 0.0044 | 225.454 | ||
| 50% | BP | 0.0888 | 0.0282 | 0.0524 | 6.897 | |
| HHO–BP | 0.0771 | 0.0261 | 0.0462 | 279.639 | ||
| N1 | 0.0429 | 0.0273 | 0.0393 | 256.132 | ||
| N2 | 0.0340 | 0.0171 | 0.0187 | 282.197 | ||
| N3 | 0.0191 | 0.0199 | 0.0231 | 238.428 | ||
| N4 | 0.0069 | 0.0095 | 0.0114 | 236.733 | ||
| B2 | 70% | BP | 0.0686 | 0.0414 | 0.0455 | 6.638 |
| HHO–BP | 0.0551 | 0.0292 | 0.0406 | 284.092 | ||
| N1 | 0.0375 | 0.0218 | 0.0423 | 274.322 | ||
| N2 | 0.0322 | 0.0169 | 0.0248 | 294.510 | ||
| N3 | 0.0177 | 0.0106 | 0.0240 | 221.563 | ||
| N4 | 0.0158 | 0.0069 | 0.0093 | 230.143 | ||
| 60% | BP | 0.0885 | 0.0676 | 0.0576 | 6.217 | |
| HHO–BP | 0.0748 | 0.0312 | 0.0422 | 290.848 | ||
| N1 | 0.0336 | 0.0245 | 0.0238 | 259.163 | ||
| N2 | 0.0410 | 0.0267 | 0.0293 | 258.164 | ||
| N3 | 0.0273 | 0.0106 | 0.0224 | 229.888 | ||
| N4 | 0.0116 | 0.0031 | 0.0060 | 228.334 | ||
| 50% | BP | 0.0772 | 0.0251 | 0.0548 | 5.845 | |
| HHO–BP | 0.0465 | 0.0265 | 0.0421 | 283.726 | ||
| N1 | 0.0375 | 0.0316 | 0.0252 | 293.523 | ||
| N2 | 0.0376 | 0.0169 | 0.0366 | 257.839 | ||
| N3 | 0.0245 | 0.0184 | 0.0245 | 231.567 | ||
| N4 | 0.0135 | 0.0094 | 0.0096 | 234.888 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Shao, Z.; Li, H.; Chen, J.; Sun, H.; Wang, Y.; Wang, N.; Pei, L.; Wang, Z.; Zhang, H.; et al. A Novel Back Propagation Neural Network Based on the Harris Hawks Optimization Algorithm for the Remaining Useful Life Prediction of Lithium-Ion Batteries. Energies 2025, 18, 3842. https://doi.org/10.3390/en18143842
Zhou Y, Shao Z, Li H, Chen J, Sun H, Wang Y, Wang N, Pei L, Wang Z, Zhang H, et al. A Novel Back Propagation Neural Network Based on the Harris Hawks Optimization Algorithm for the Remaining Useful Life Prediction of Lithium-Ion Batteries. Energies. 2025; 18(14):3842. https://doi.org/10.3390/en18143842
Chicago/Turabian StyleZhou, Yuyang, Zijian Shao, Huanhuan Li, Jing Chen, Haohan Sun, Yaping Wang, Nan Wang, Lei Pei, Zhen Wang, Houzhong Zhang, and et al. 2025. "A Novel Back Propagation Neural Network Based on the Harris Hawks Optimization Algorithm for the Remaining Useful Life Prediction of Lithium-Ion Batteries" Energies 18, no. 14: 3842. https://doi.org/10.3390/en18143842
APA StyleZhou, Y., Shao, Z., Li, H., Chen, J., Sun, H., Wang, Y., Wang, N., Pei, L., Wang, Z., Zhang, H., & Yuan, C. (2025). A Novel Back Propagation Neural Network Based on the Harris Hawks Optimization Algorithm for the Remaining Useful Life Prediction of Lithium-Ion Batteries. Energies, 18(14), 3842. https://doi.org/10.3390/en18143842