
The Optimization of Mechanical Phase-Shifting Transformer Tap Positions Based on an Open-Loop and Closed-Loop Hybrid Strategy


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- A novel control circuit for MPST is proposed, which is based on a hybrid control strategy that combines both open-loop and closed-loop control modes. By integrating a tap position optimization controller and a line power flow calculator, the control circuit achieves precise adjustment and optimization of the transformer’s tap. The system dynamically switches between open-loop and closed-loop control modes, effectively mitigating issues of system oscillation while enhancing control accuracy and improving response speed.
- (2)
- Based on the newly proposed control framework, a hybrid open-closed loop strategy is developed that integrates the continuous control function of a PI regulator with the discrete step adjustment of a mechanical tap changer. This strategy enables the real-time fine-tuning and optimization of the tap position in PSTs. When the system reaches a steady operational state or achieves the desired control objectives, it seamlessly transitions to pure mechanical tap changer control. This ensures a smooth handover from continuous to discrete regulation, allowing the system to maintain the optimized tap setting under stable conditions and guaranteeing long-term operational stability and performance.
2. Limitations and Impacts of Mechanical Phase-Shifting Transformer in Power Flow Control
2.1. The Principle of Phase-Shifting Transformer Suppression of System Oscillations
2.2. The Limitations of a Mechanical Phase-Shifting Transformer
3. Tap Position Optimization Strategy
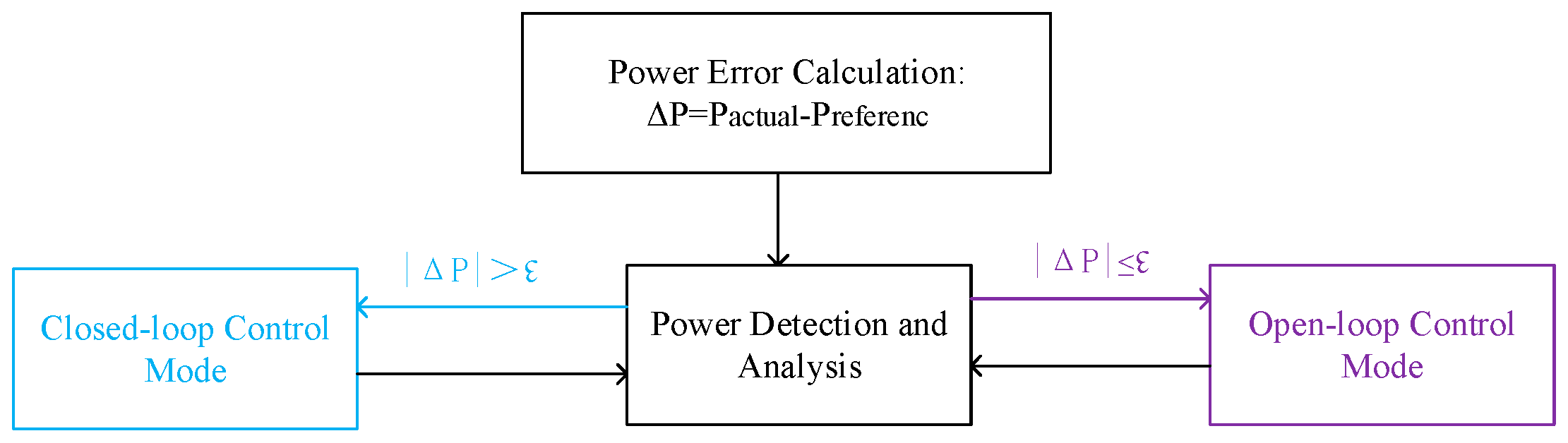
3.1. Closed-Loop Control Strategy
3.2. Open-Loop and Closed-Loop Hybrid Strategy
- (1)
- Keep the reference tap position unchanged and record the difference between the actual power and the reference power, denoted as difference 1.
- (2)
- Adjust the tap position downward by one position from the reference tap position, i.e., reference tap position − 1, and maintain this for two seconds. Record the difference between the actual power and the reference power, denoted as difference 2.
- (3)
- Adjust the tap position upward by one position from the reference tap position, i.e., reference tap position + 1, and maintain this for two seconds. Record the difference between the actual power and the reference power, denoted as difference 3.
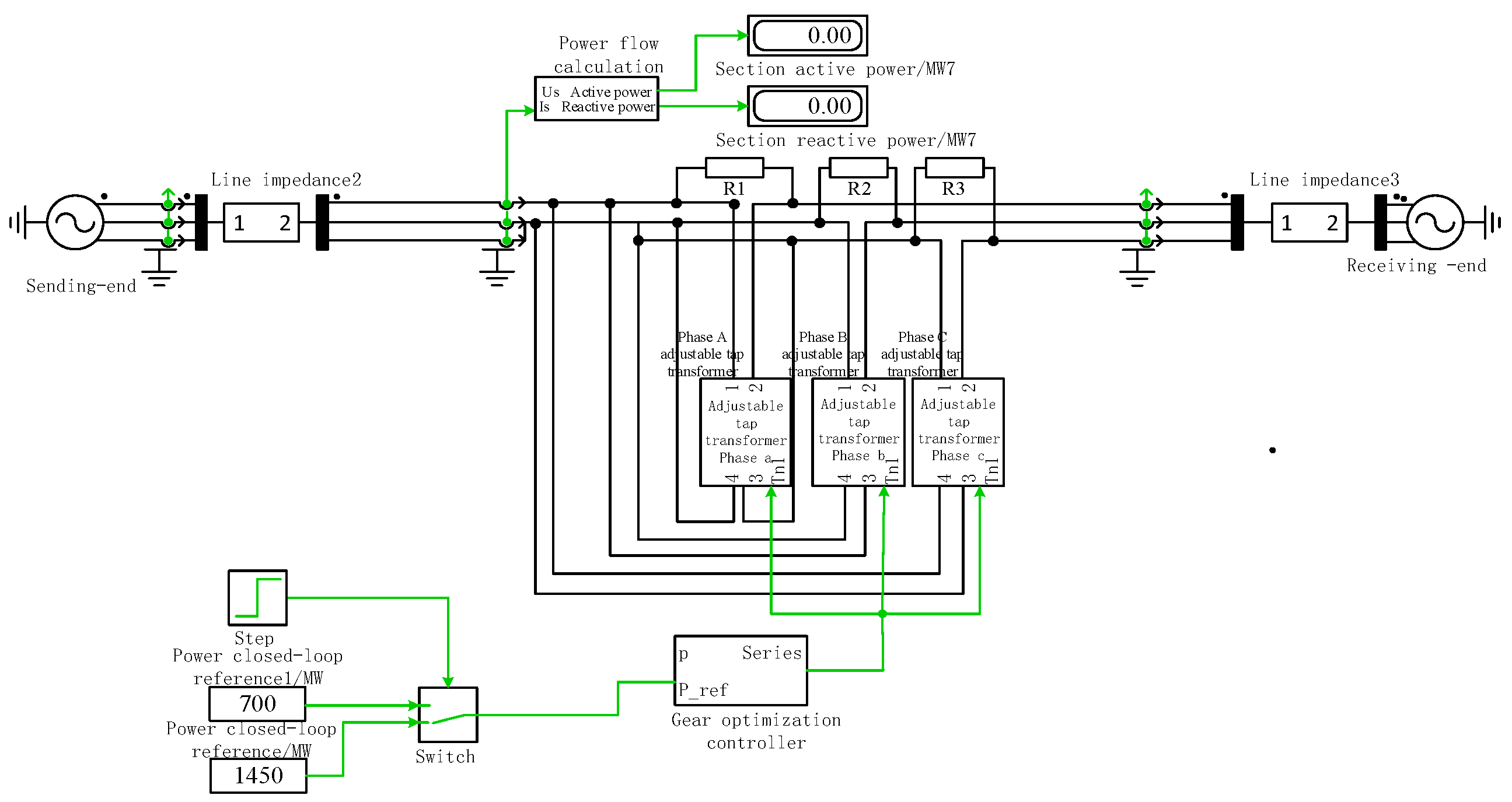
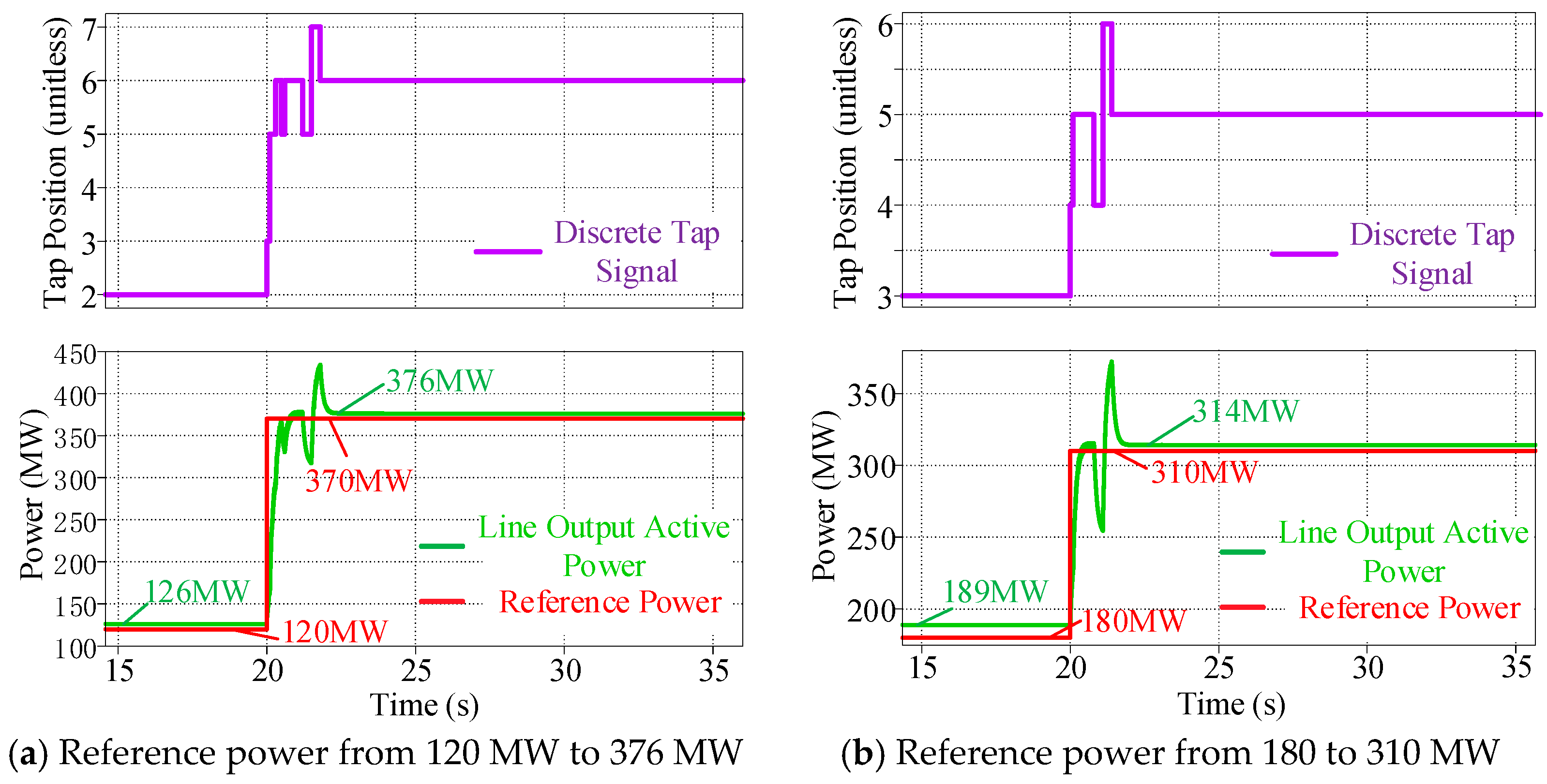
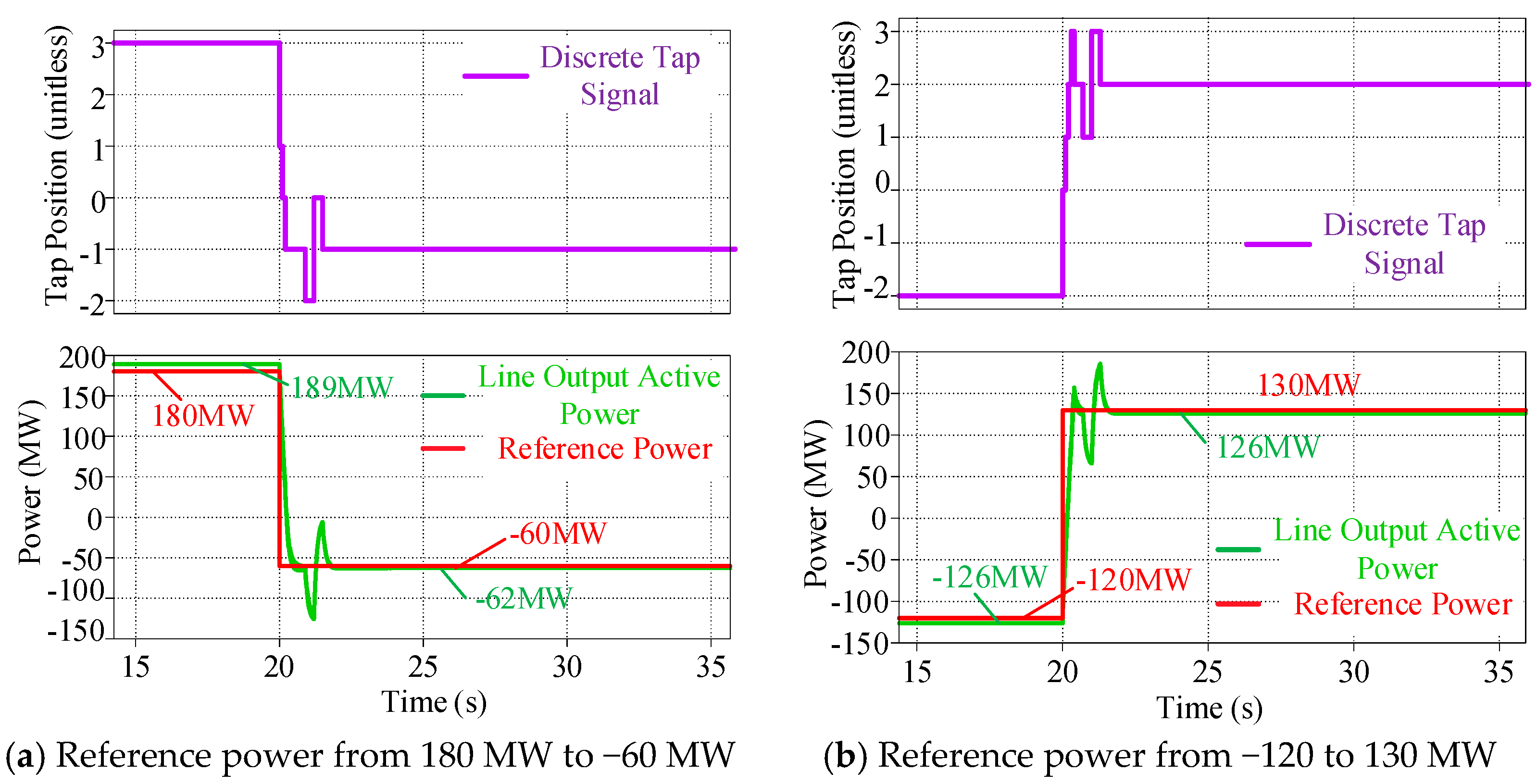
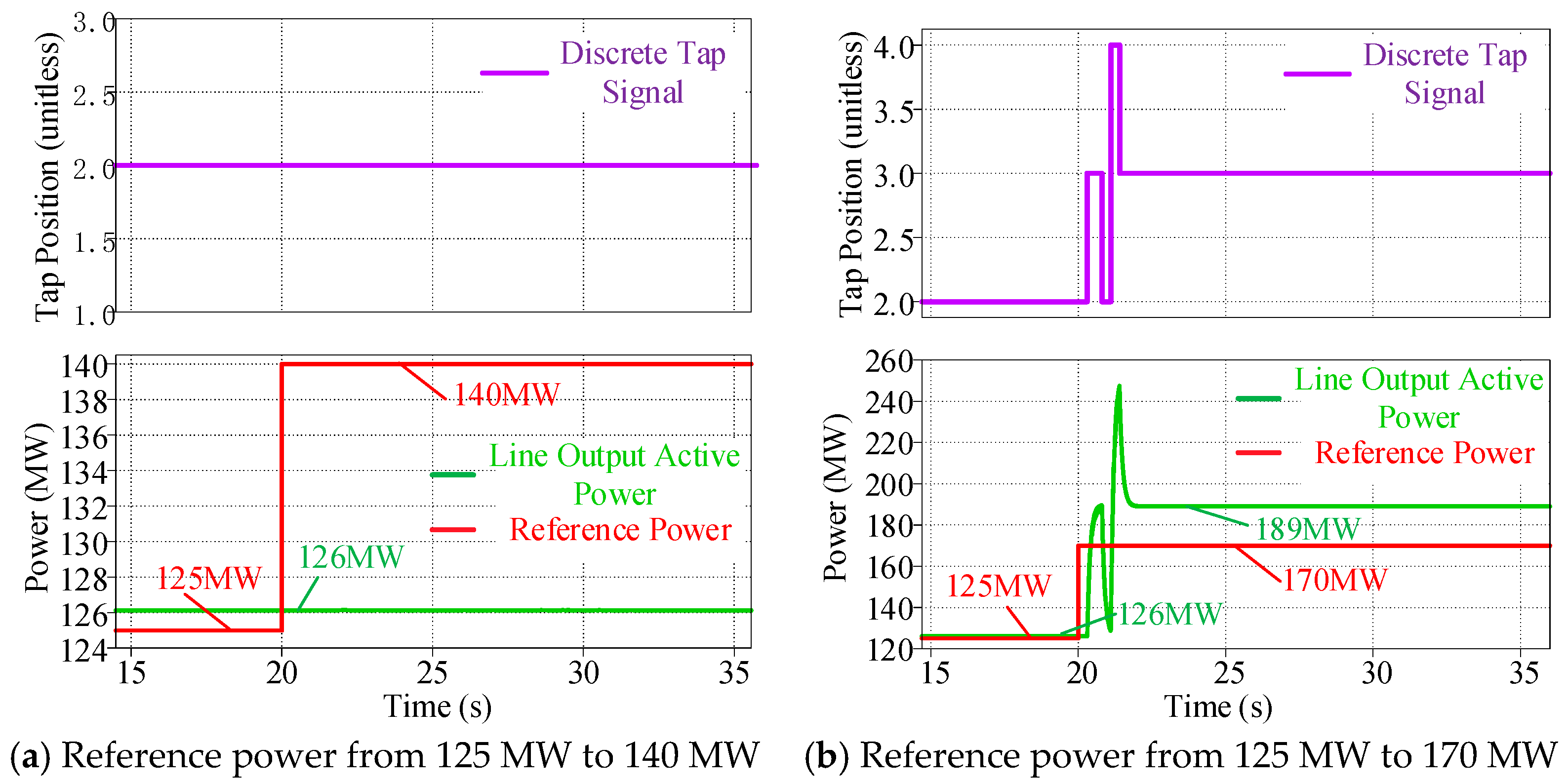
4. Simulation and Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Boroyevich, D.; Cvetkovic, I.; Burgos, R.; Dong, D. Intergrid: A Future Electronic Energy Network? IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 127–138. [Google Scholar] [CrossRef]
- Sreejith, S.; Simon, S.P.; Selvan, M.P. Analysis of FACTS devices on security constrained unit commitment problem. Int. J. Electr. Power Energy Syst. 2015, 66, 280–293. [Google Scholar] [CrossRef]
- Luburi, Z.; Pand, I.H. FACTS devices and energy storage in unit commitment. Int. J. Electr. Power Energy Syst. 2019, 104, 311–325. [Google Scholar] [CrossRef]
- Taher, M.A.; Kamel, S.; Jurado, F.; Ebeed, M. Optimal power flow solution incorporating a simplified UPFC model using lightning attachment procedure optimization. Int. Trans. Electr. Energy Syst. 2020, 30, e12170. [Google Scholar] [CrossRef]
- Sha, J.; Guo, C.; Rehman, A.U.; Zhao, C. A quantitative index to evaluate the commutation failure probability of LCCHVDC with a synchronous condenser. Appl. Sci. 2019, 9, 925. [Google Scholar] [CrossRef]
- Liu, J.; Xu, Z.; Yang, J.; Zhang, Z. Modeling and analysis for global and local power flow operation rules of UPFC embedded system under typical operation conditions. IEEE Access 2020, 8, 21728–21741. [Google Scholar] [CrossRef]
- Wang, H.F. Interactions and multivariable design of multiple control functions of a unified power flow controller. Int. J. Electr. Power Energy Syst. 2002, 24, 591–600. [Google Scholar] [CrossRef]
- Kawabe, K.; Yokoyama, A. Stability enhancement by multiple unified power flow controllers using wide-area information in the multi-machine power system. In Proceedings of the International Conference on Power System Technology, Hangzhou, China, 24–28 October 2010. [Google Scholar]
- Rashad, A.; Kamel, S.; Jurado, F.; Rihan, M.; Ebeed, M. Optimal design of SSSC and crowbar parameters for performance enhancement of Egyptian Zafrana wind farm. Electr. Eng. 2022, 104, 1441–1457. [Google Scholar] [CrossRef]
- Zhen, Q.; Gao, S.; Zhang, N.; Zhao, X.; Shi, Q.; Wang, Y.; Yang, L.; Liu, C. The design of TCPST operation parameter considering steady and dynamic characteristics. In Proceedings of the IEEE Sustainable Power and Energy Conference (iSPEC), Nanjing, China, 23–25 December 2021. [Google Scholar]
- Lu, W.; Chen, Y.; Zeng, K.; Li, J.; Chen, N.; Du, Z. A power flow control measure of across voltage levels based on TCPST in a distribution network with DG. In Proceedings of the 2022 12th International Conference on Power and Energy Systems (ICPES), Guangzhou, China, 23–25 December 2022. [Google Scholar]
- Hill, A.T. Thyristor Control of an Existing Phase-Shift Transformer; EPRI: Palo Alto, CA, USA, 1993. [Google Scholar]
- Minnesota Power. Static Phase-Shift Transformer Application and Concepts for Minnesota-Ontario Interconnection; EPRI: Palo Alto, CA, USA, 1992. [Google Scholar]
- Navabi, R.; Etemad, R.; Shayanfar, H.A. Self tuning fuzzy PI controller for UPFC to improve power system stability optimized by ant colony method. In Proceedings of the 2010 ECTI International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Chengdu, China, 28–31 March 2010. [Google Scholar]
- Al-Khanisi, N.; Heng, C. Thyristor controlled phase-shift transformer: A comprehensive survey. J. Southeast Univ. 2001, 17, 87–88. [Google Scholar]
- Wang, D.; Zhou, Q.; Ding, F. Analysis on Thyristor Firing Angle Influence of Discrete Regulated Fhase Shifter. Autom. Electr. Power Syst. 2014, 38, 121–126. [Google Scholar]
- Ding, T.; Bo, R.; Bie, Z.; Wang, X. Optimal Selection of Phase Shifting Transformer Adjustment in Optimal Power Flow. Power Syst. IEEE Trans. 2017, 32, 2464–2465. [Google Scholar] [CrossRef]
- Liu, J.; Hao, X.; Wang, X.; Chen, Y.; Fang, W.; Niu, S. Application of thyristor controlled phase shifting transformer excitation impedance switching control to suppress short-circuit fault current level. J. Mod. Power Syst. Clean Energy 2018, 6, 821–832. [Google Scholar] [CrossRef]
- Yan, Y.; Bai, H.; Chen, R.; Tolbert, L.M.; Wang, F. Unifying the Transformer Current in Multiple Phase Modulation Without Current Spike During Load Transients. IEEE Trans. Power Electron. 2022, 37, 14057–14061. [Google Scholar] [CrossRef]
- Chen, Z.; Han, X.; Wu, J.; Jiang, W. Study of Application Scenarios of Phase Shifting Transformers Considering Optimal Power Flow in Transmission Networks. In Proceedings of the 2023 3rd International Conference on Electrical Engineering and Control Science (IC2ECS), Hangzhou, China, 29–31 December 2023; pp. 210–214. [Google Scholar]
- Xu, Z.; Qin, R.; Ma, H.; Lu, J.; Tang, J.; Yang, Y. Research on the Optimal Regulation Strategy of Loop Closing Device Based on Phase Shifting Transformer. In Proceedings of the 2021 IEEE 5th Conference on Energy Internet and Energy System Integration (EI2), Taiyuan, China, 22–24 October 2021; pp. 1203–1208. [Google Scholar]
- Yuan, J.; Zhang, W.; Mei, J.; Gan, D.; Zhou, H.; Zheng, Y.; Liu, J. Independent Fast Phase Shifting Transformer: A Flexible and High-Precision Power Flow Controller. IEEE Trans. Power Deliv. 2023, 38, 4410–4421. [Google Scholar] [CrossRef]
- Wu, Q.; Wang, Y.; Zheng, Y.; Yang, Z.; Zhao, X.; Gao, B. Review on the Technology and Engineering Application of Phase Shifting Transformer. In Proceedings of the 2024 IEEE PES 16th Asia-Pacific Power and Energy Engineering Conference (APPEEC), Nanjing, China, 25–27 October 2024; pp. 1–5. [Google Scholar]
- Hurlet, P.; Riboud, J.C.; Margoloff, J.; Tanguy, A. French Experience in Phase-Shifting Transformers; CIGRE: Paris, France, 2006. [Google Scholar]
- IEC 62032-2005; Guide for the Application Specification and Testing of Phase-Shifting Transformers. International Electrotechnical Commission: Geneva, Switzerland, 2005.
- Patel, B.K.; Smith, H.S.; Hewes, T.S.; Marsh, W.J. Application of phase shifting transformers for daniel-mc knight. IEEE Trans. Power Deliv. 1986, 1, 167–173. [Google Scholar] [CrossRef]
- Spoorenberg, C.J.G.; Hulst, B.F.V.; Reijinder, H.F. Specific aspects of design and testing of a phase shifting transformer. In International Symposium on High Voltage Engineering; ISH: Rotterdam, The Netherlands, 2003. [Google Scholar]
- Carlini, E.M.; Manduzio, G.; Bonmann, D. Power flow control on the Italian network by means of phase-shifting transformers. CIGRE Sess. 2006, A2-206, 1–12. [Google Scholar]
- Siddiqui, A.S.; Khan, S.; Ahsan, S.; Khan, M.I. Application of phase shifting transformer in Indian network. In Proceedings of the 2012 International Conference on Green Technologies (ICGT), Trivandrum, India, 18–20 December 2012; pp. 186–191. [Google Scholar]
- Gajic, Z. Use of standard 87T differential protection for special three phase power transformers part 1: Theory. IEEE Trans. Power Deliv. 2012, 27, 1035–1040. [Google Scholar] [CrossRef]
- Khan, U.N.; Sidhu, T.S. A phase-shifting transformer protection technique based on directional comparison approach. IEEE Trans. Power Deliv. 2014, 5, 2315–2323. [Google Scholar] [CrossRef]
- Okon, T.; Wilkosz, K. Phase-shift transformer models for steady state analysis. In Proceedings of the 17th International Scientific Conference on Electric Power Engineering (EPE), Prague, Czech Republic, 16–18 May 2016; IEEE: New York, NY, USA, 2016; pp. 1–6. [Google Scholar]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, J.; Du, J.; Chen, S.; Wang, X.; Long, H.; Wang, C. The Optimization of Mechanical Phase-Shifting Transformer Tap Positions Based on an Open-Loop and Closed-Loop Hybrid Strategy. Energies 2025, 18, 3699. https://doi.org/10.3390/en18143699
Lin J, Du J, Chen S, Wang X, Long H, Wang C. The Optimization of Mechanical Phase-Shifting Transformer Tap Positions Based on an Open-Loop and Closed-Loop Hybrid Strategy. Energies. 2025; 18(14):3699. https://doi.org/10.3390/en18143699
Chicago/Turabian StyleLin, Jinjiao, Jingyan Du, Shi Chen, Xinying Wang, Haodong Long, and Chuyang Wang. 2025. "The Optimization of Mechanical Phase-Shifting Transformer Tap Positions Based on an Open-Loop and Closed-Loop Hybrid Strategy" Energies 18, no. 14: 3699. https://doi.org/10.3390/en18143699
APA StyleLin, J., Du, J., Chen, S., Wang, X., Long, H., & Wang, C. (2025). The Optimization of Mechanical Phase-Shifting Transformer Tap Positions Based on an Open-Loop and Closed-Loop Hybrid Strategy. Energies, 18(14), 3699. https://doi.org/10.3390/en18143699