
Damage Detection for Offshore Wind Turbines Subjected to Non-Stationary Ambient Excitations: A Noise-Robust Algorithm Using Partial Measurements

 , , ,
, , ,
Abstract
1. Introduction
2. The Proposed Method
2.1. Equation for Non-Stationary Cross-Correlation Function of Responses
2.2. Structural Damage Detection Under Known Non-Stationary Ambient Excitations
2.3. Structural Damage Detection Under Unknown Non-Stationary Ambient Excitations
2.4. Influence of Measurement Noise
3. Numerical Validations
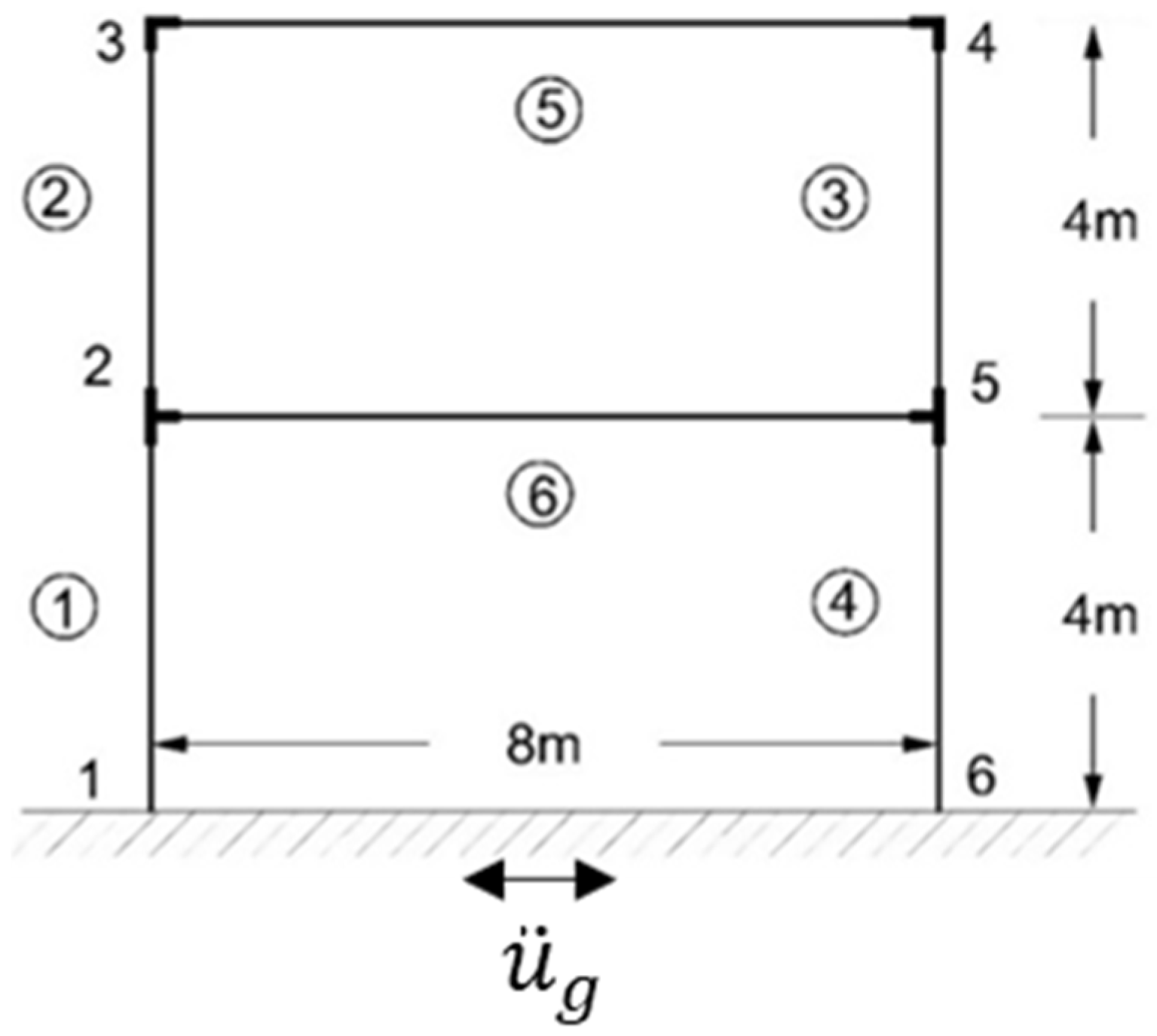
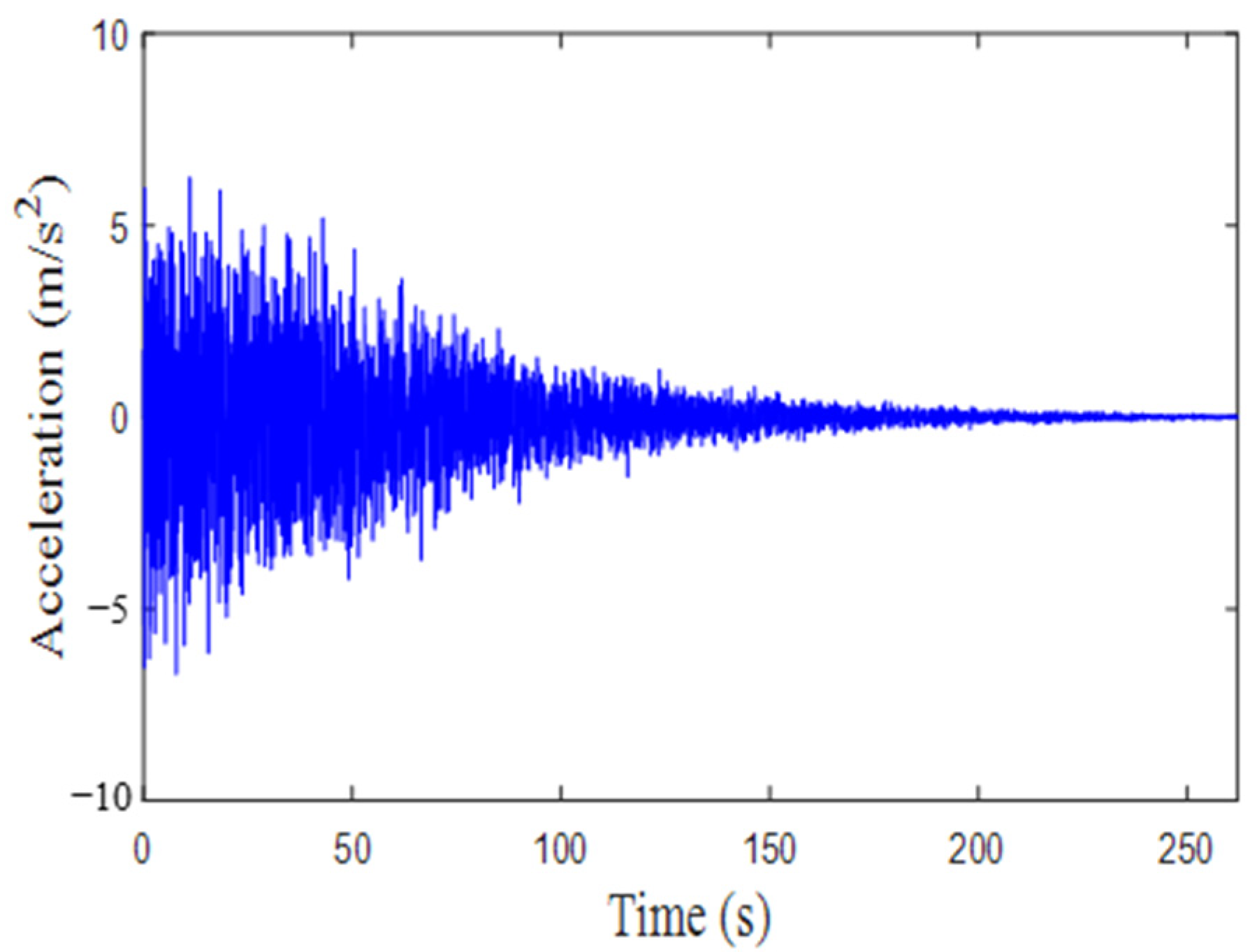
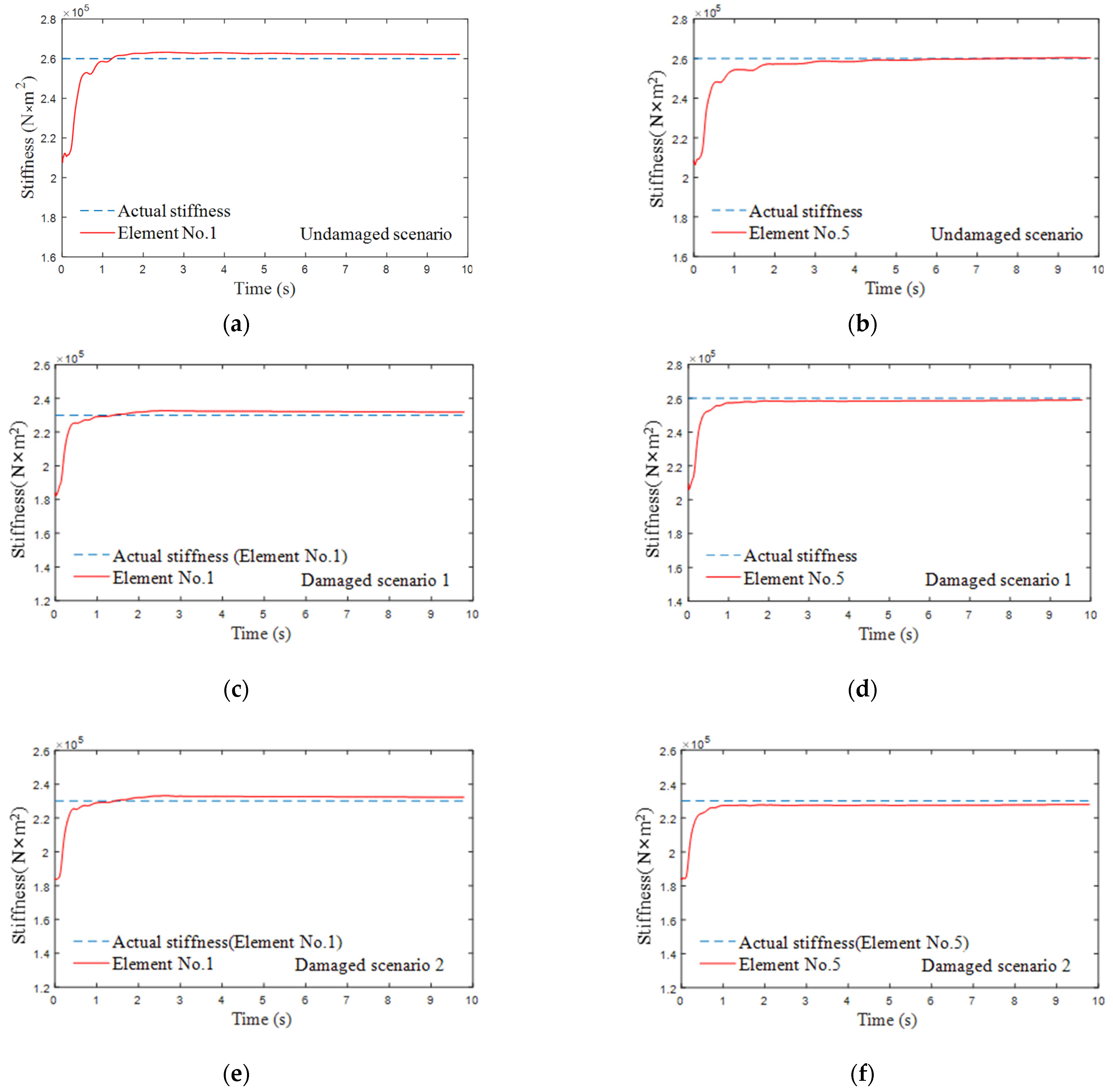
3.1. Frame Structure Under Known Non-Stationary Ground Excitation
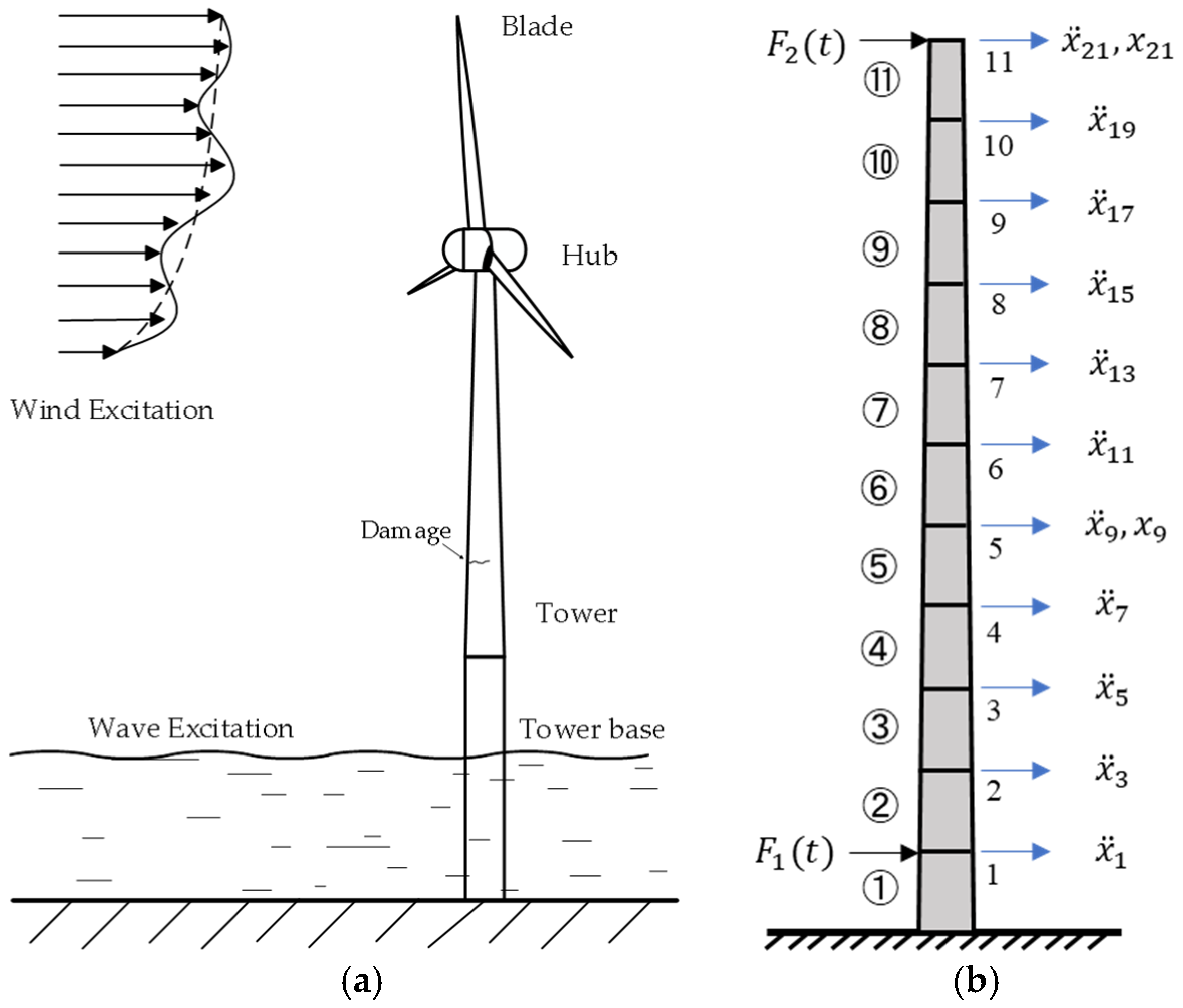
3.2. An OWT Tower Under Unknown Non-Stationary Wind and Wave Excitations
- (1)
- This developed approach can accurately detect the tower damage in operational OWTs through partial acceleration and displacement measurements, even under the challenging condition of concurrent unknown non-stationary wind and wave excitations.
- (2)
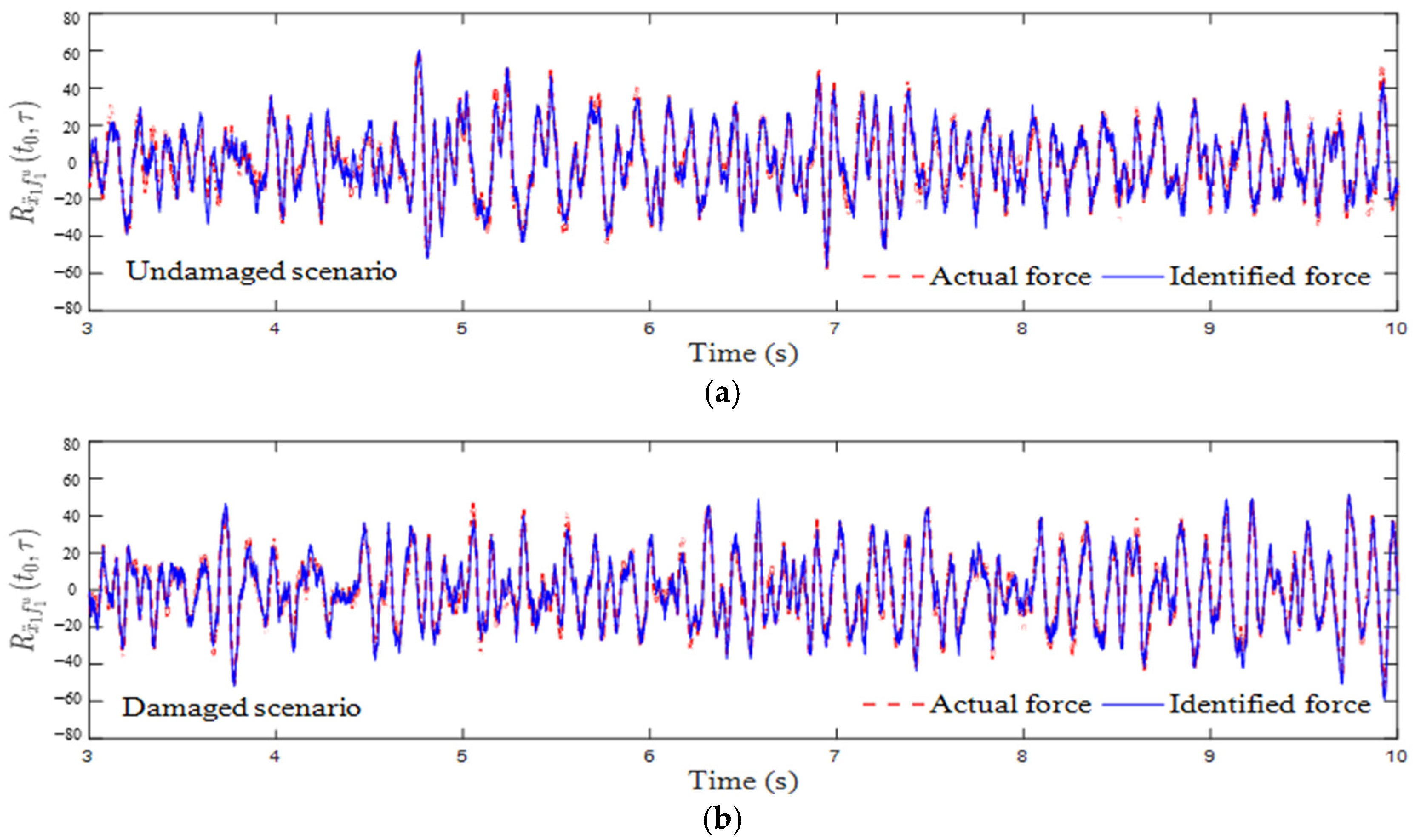
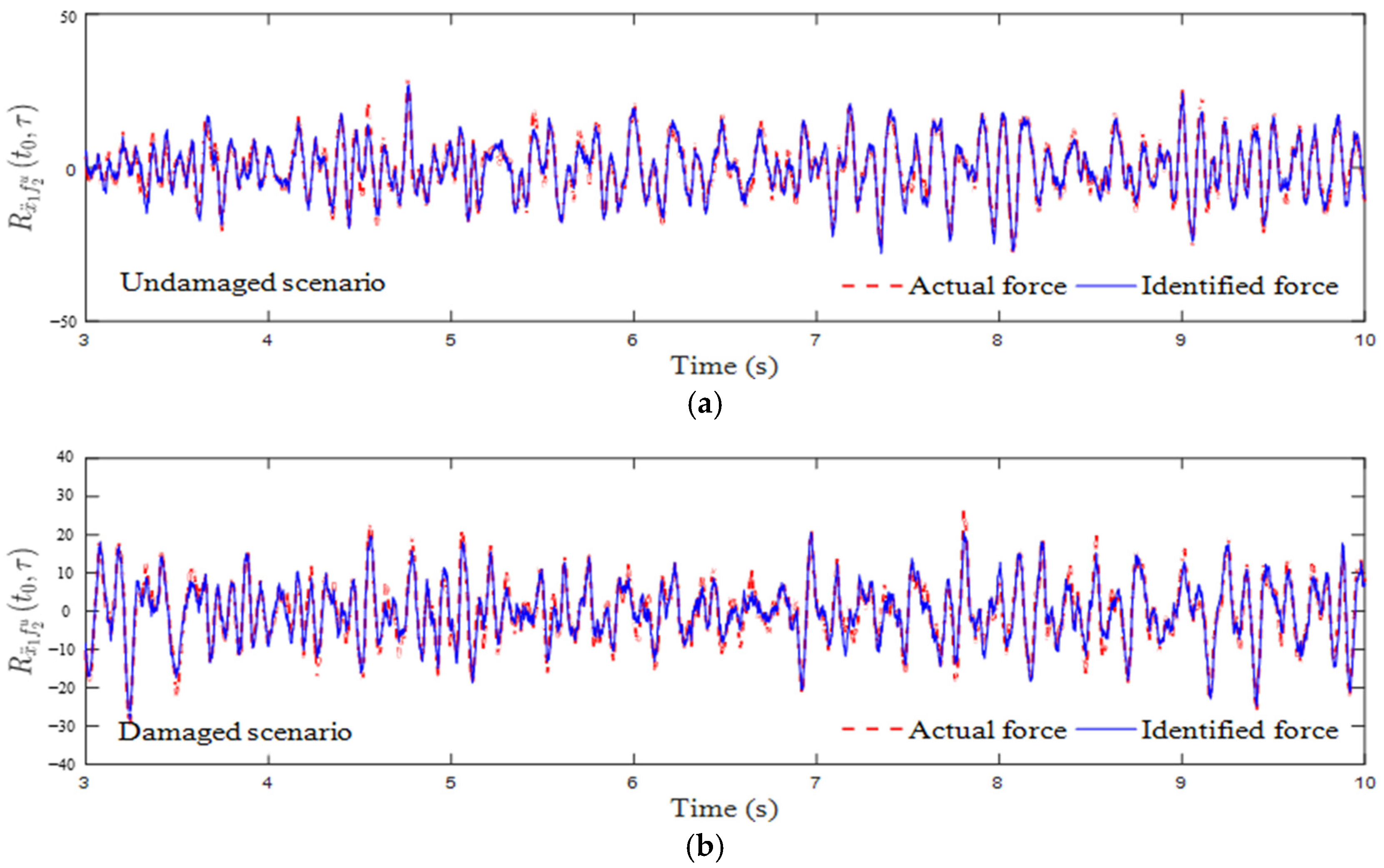
- The cross-correlation functions of the unknown excitations are accurately identified without observable drift phenomena.
- (3)
- Most notably, the method maintains reliable performance when processing raw measurement data contaminated with high-level noise (15% RMS), as evidenced by the satisfactory identification accuracy achieved without any signal preprocessing. This demonstrates the algorithm’s inherent noise robustness and practical applicability in real-world OWTs where measurement noise is unavoidable.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wilk-Jakubowski, J.L.; Pawlik, L.; Wilk-Jakubowski, G.; Harabin, R. State-of-the-art in the use of renewable energy sources on the example of wind, wave energy, tidal energy, and energy harvesting: A review from 2015 to 2024. Energies 2025, 18, 1356. [Google Scholar] [CrossRef]
- Lee, G.N.; Ngo, D.V.; Lee, S.I.; Kim, D.H. Fatigue life convergence of offshore wind turbine support structure according to wind measurement period. Energies 2023, 16, 3199. [Google Scholar] [CrossRef]
- Jiang, C.H.; Chen, N.Z. G-Twin: Graph neural network-based digital twin for real-time and high-fidelity structural health monitoring for offshore wind turbines. Mar. Struct. 2025, 103, 103813. [Google Scholar] [CrossRef]
- Alotaibi, M.A.; Algatheem, A.M.; El-Sapa, S. Magneto-slip interaction in the migration of two rigid spheres in infinite couple stress fluid. Chin. J. Phys. 2025, 95, 173–189. [Google Scholar] [CrossRef]
- Alotaibi, M.A.; El-Sapa, S. Effect of permeability on the interaction between two spheres translating through a couple stress fluid. Fluid Dyn. Res. 2025, 57, 015503. [Google Scholar] [CrossRef]
- El-Sapa, S.; Alsedais, N.S. Effect of slippage on a translational motion of two interacting non-concentric spheres squeezed by couple stress fluid. Indian J. Pure Appl. Math. 2024, 1–17. [Google Scholar] [CrossRef]
- Ou, Y.; Chatzi, E.N.; Dertimanis, V.K.; Spiridonakos, M.D. Vibration-based experimental damage detection of a small-scale wind turbine blade. Struct. Health Monit. 2016, 16, 79–96. [Google Scholar] [CrossRef]
- Xu, M.Q.; Li, J.; Wang, S.Q.; Yang, N.; Hao, H. Damage detection of wind turbine blades by Bayesian multivariate cointegration. Ocean Eng. 2022, 258, 111603. [Google Scholar] [CrossRef]
- Hoell, S.; Omenzetter, P. Sequential projection pursuit for optimised vibration based damage detection in an experimental wind turbine blade. Smart Mater. Struct. 2018, 27, 025007. [Google Scholar] [CrossRef]
- Yang, N.; Luo, S.J.; Lei, Y. Structural damage diagnosis based on the temporal moment of partially measured structural responses. J. Aerosp. Eng. 2021, 34, 04020106. [Google Scholar] [CrossRef]
- El-Kafafy, M.; Devriendt, C.; Guillaume, P.; Helsen, J. Automatic tracking of the modal parameters of an offshore wind turbine drivetrain system. Energies 2017, 10, 574. [Google Scholar] [CrossRef]
- Sarrafi, A.; Mao, Z.; Niezrecki, C.; Poozesh, P. Vibration-based damage detection in wind turbine blades using Phase-based Motion Estimation and motion magnification. J. Sound Vib. 2018, 421, 300–318. [Google Scholar] [CrossRef]
- Fan, W.; Qiao, P.Z. Vibration-based damage identification methods: A review and comparative study. Struct. Health Monit. 2011, 10, 83–111. [Google Scholar] [CrossRef]
- Song, M.M.; Mehr, N.P.; Moaveni, B.; Hines, E.; Ebrahimian, H.; Bajric, A. One year monitoring of an offshore wind turbine: Variability of modal parameters to ambient and operational conditions. Eng. Struct. 2023, 297, 117022. [Google Scholar] [CrossRef]
- Zhang, P.; He, Z.J.; Cui, C.Y.; Ren, L.; Yao, R.Q. Operational modal analysis of offshore wind turbine tower under ambient excitation. J. Mar. Sci. Eng. 2023, 10, 1963. [Google Scholar] [CrossRef]
- Rosso, M.M.; Aloisio, A.; Melchiorre, J.; Huo, F.; Marano, G.C. Noise effects analysis on subspace-based damage detection with neural networks. Structures 2023, 54, 23–37. [Google Scholar] [CrossRef]
- Yu, Q.X.; Yu, H.B.; Zhou, L.; Meng, A.K.; Hu, X.Y.; Hou, X.D. Structural energy transfer to the elevated pile-cap foundation of an offshore wind turbine based on extracted transfer. J. Sound Vib. 2021, 512, 116388. [Google Scholar] [CrossRef]
- Yang, N.; Lei, Y.; Li, J.; Hao, H. Identification of gradually varying physical parameters based on discrete cosine transform using partial measurements. Struct. Control Health Monit. 2022, 29, e3111. [Google Scholar] [CrossRef]
- Xu, M.Q.; Guo, J.; Wang, S.Q.; Li, J.; Hao, H. Structural damage identification with limited modal measurements and ultra-sparse Bayesian regression. Struct. Control Health Monit. 2021, 28, e2729. [Google Scholar] [CrossRef]
- Iliopoulos, A.; Shirzadeh, R.; Weijtjens, W.; Guillaume, P.; Van Hemelrijck, D.; Devriendt, C. A modal decomposition and expansion approach for prediction of dynamic responses on a monopile offshore wind turbine using a limited number of vibration sensors. Mech. Syst. Signal Process. 2016, 68–69, 84–104. [Google Scholar] [CrossRef]
- Naseralavi, S.S.; Salajegheh, E.; Fadaee, M.J.; Salajegheh, J. A novel sensitivity-based method for damage detection of structures under unknown periodic excitations. J. Sound Vib. 2014, 333, 2776–2803. [Google Scholar] [CrossRef]
- Liu, Q.N.; Yan, Y.T.; Yang, Y.; Ma, L.; Qin, Z.H.; Bashir, M.; Yu, J.; Zhao, H.S. Influence of ground motion directionality on the dynamic behavior of a large-scale offshore wind turbine considering wind-earthquake coupling effects. Ocean Eng. 2025, 330, 121181. [Google Scholar] [CrossRef]
- Bai, J.L.; Jiao, C.Y.; Ai, F.W.; Wang, Y.H.; Yang, Q.S. Dynamic response of the jacket offshore wind turbines subjected to coupled wind, wave, and earthquake loads under scour conditions. Ocean Eng. 2025, 328, 120901. [Google Scholar] [CrossRef]
- Avendaño-Valencia, L.D.; Fassois, S.D. Stationary and non-stationary random vibration modelling and analysis for an operating wind turbine. Mech. Syst. Signal Process. 2014, 47, 263–285. [Google Scholar] [CrossRef]
- Orlando, A.; Pagnini, L.; Repetto, M.P. Structural response and fatigue assessment of a small vertical axis wind turbine under stationary and non-stationary excitation. Renew. Energy 2021, 170, 251–266. [Google Scholar] [CrossRef]
- Li, Y.; Wang, B.; Liu, Q.; Gao, S.; Lu, S.J. Application of converted displacement for modal parameter identification of offshore wind turbines with high-pile foundation. J. Ocean Univ. China 2022, 21, 1467–1478. [Google Scholar] [CrossRef]
- Blackman, R.B.; Tukey, J.W. The Measurement of Power Spectra; Dover: Mineola, NY, USA, 1958; pp. 42–58. [Google Scholar]
- Lei, Y.; Chen, F.; Zhou, H. An algorithm based on two-step Kalman filter for intelligent structural damage detection. Struct. Control Health Monit. 2012, 22, 694–706. [Google Scholar] [CrossRef]
- Panigrahi, S.K.; Patel, C.; Chourasia, A.; Bisht, R.S. Cross-correlation difference matrix based structural damage detection approach for building structures. J. Civ. Struct. Health Monit. 2024, 14, 1439–1453. [Google Scholar] [CrossRef]
- Li, W.; Huang, Y. A method for damage detection of a jacket platform under random wave excitations using cross correlation analysis and PCA-based method. Ocean Eng. 2020, 214, 107734. [Google Scholar] [CrossRef]
- Wang, L.X.; Li, X.Y.; Tan, Y.; Law, S.S. Long-term health monitoring of in-service bridge deck by covariance of covariance matrix of acceleration responses. Adv. Struct. Eng. 2015, 18, 2129–2149. [Google Scholar] [CrossRef]
- Hoshiya, M.; Saito, E. Structural identification by extended Kalman filter. J. Eng. Mech. 1984, 110, 1757–1771. [Google Scholar] [CrossRef]
- He, J.; Qi, M.C.; Tong, Z.H.; Hua, X.G.; Chen, Z.Q. An improved extended Kalman filter for parameters and loads identification without collocated measurements. Smart Struct. Syst. 2023, 31, 131–140. [Google Scholar]
- Yang, N.; Li, J.; Xu, M.Q.; Wang, S.Q. Real-time identification of time-varying cable force using an improved adaptive extended Kalman filter. Sensors 2022, 22, 4212. [Google Scholar] [CrossRef]
- Song, M.M.; Moaveni, B.; Ebrahimian, H.; Hines, E.; Bajric, A. Joint parameter-input estimation for digital twinning of the Block Island wind turbine using output-only measurements. Mech. Syst. Signal Process. 2023, 198, 110425. [Google Scholar] [CrossRef]
- Liu, L.J.; Su, Y.; Zhu, J.J.; Lei, Y. Data fusion based EKF-UI for real-time simultaneous identification of structural systems and unknown external inputs. Measurement 2016, 88, 456–467. [Google Scholar] [CrossRef]
- Li, Y.; Zheng, Y.F.; Luo, Y.Z.; Qiu, S.F.; Sun, L.J. Seismic load identification for damper-added and base-isolated frame structures using EKF-UI algorithm and data fusion technique. J. Build. Eng. 2025, 104, 112426. [Google Scholar] [CrossRef]
- Lei, Y.; Qi, C.K.; Wang, S.Y. A smoothing EKF-UI-WDF method for simultaneous identification of structural systems and unknown seismic inputs without direct feedthrough. Struct. Control Health Monit. 2023, 2023, 6968598. [Google Scholar] [CrossRef]
- Xu, M.Q.; Wang, S.Q. Cross modal strain energy–based structural damage detection in the presence of noise effects. Adv. Mech. Eng. 2017, 9, 1687814017744122. [Google Scholar] [CrossRef]
- Tajimi, H. A statistical method of determining the maximum response of a building structure during an earthquake. In Proceedings of the 2nd World Conference on Earthquake Engineering, Tokyo, Japan, 11–18 July 1960. [Google Scholar]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5 MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Laboratory: Golden, CO, USA, 2009. [Google Scholar]
- Zhai, X.Y.; Li, Z.N.; Li, Z.M.; Xue, Y.X.; Chang, X.Y.; Su, J.; Jin, X.L.; Wang, P.; Sun, H.B. Risk-averse energy management for integrated electricity and heat systems considering building heating vertical imbalance: An asynchronous decentralized approach. Appl. Energy 2025, 383, 125271. [Google Scholar] [CrossRef]
- Ding, B.; Li, Z.N.; Li, Z.M.; Xue, Y.X.; Chang, X.Y.; Su, J.; Sun, H.B. Cooperative operation for multiagent energy systems integrated with wind, hydrogen, and buildings: An asymmetric Nash bargaining approach. IEEE Trans. Ind. Inform. 2025, 1–12. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element No. | Undamaged Scenario (15% Noise) | Damaged Scenario 1 (15% Noise) | Damaged Scenario 2 (15% Noise) | ||||||
|---|---|---|---|---|---|---|---|---|---|
|
Actual (kN·m2) | Identified (kN·m2) | Error (%) | Actual (kN·m2) | Identified (kN·m2) | Error (%) | Actual (kN·m2) | Identified (kN·m2) | Error (%) | |
| 1 | 260 | 262.1 | 0.81 | 230 | 231.8 | 0.78 | 230 | 232.2 | 0.96 |
| 2 | 260 | 257.0 | −1.15 | 260 | 261.3 | 0.50 | 260 | 261.0 | 0.38 |
| 3 | 260 | 257.0 | −1.15 | 260 | 258.4 | −0.62 | 260 | 258.9 | −0.42 |
| 4 | 260 | 262.1 | 0.81 | 260 | 259.4 | −0.23 | 260 | 260.0 | 0.00 |
| 5 | 260 | 260.4 | 0.15 | 260 | 258.9 | −0.42 | 230 | 227.9 | −0.91 |
| 6 | 260 | 257.9 | −0.81 | 260 | 259.3 | −0.27 | 260 | 259.0 | −0.38 |
| Element No. | Length (m) | Unit Length Mass Density (kg/m) | kN·m2) |
|---|---|---|---|
| 1 | 8.53 | 5590.87 | 6.14 |
| 2 | 8.53 | 5232.43 | 5.35 |
| 3 | 8.53 | 4885.76 | 4.63 |
| 4 | 8.53 | 4550.87 | 3.99 |
| 5 | 8.53 | 4227.75 | 3.42 |
| 6 | 8.53 | 3916.41 | 2.91 |
| 7 | 8.53 | 3616.83 | 2.46 |
| 8 | 8.53 | 3329.03 | 2.07 |
| 9 | 8.53 | 3053.01 | 1.72 |
| 10 | 8.53 | 2788.75 | 1.42 |
| 11 | 2.33 | 2536.27 | 1.16 |
| Element No. | Undamaged Scenario (15% Noise) | Damaged Scenario (15% Noise) | ||||
|---|---|---|---|---|---|---|
| Actual EI kN·m2) | Identified EI kN·m2) | Error (%) | Actual EI kN·m2) | Identified EI kN·m2) | Error (%) | |
| 1 | 6.14 | 6.24 | 1.51 | 6.14 | 6.20 | 0.89 |
| 2 | 5.35 | 5.21 | −2.60 | 5.35 | 5.21 | −2.52 |
| 3 | 4.63 | 4.83 | 4.32 | 4.49 | 4.72 | 5.12 |
| 4 | 3.99 | 4.08 | 2.28 | 3.99 | 4.02 | 0.69 |
| 5 | 3.42 | 3.37 | −1.39 | 3.42 | 3.36 | −1.69 |
| 6 | 2.91 | 2.94 | 0.97 | 2.91 | 2.94 | 1.03 |
| 7 | 2.46 | 2.51 | 1.85 | 2.46 | 2.42 | −1.77 |
| 8 | 2.07 | 2.01 | −2.74 | 2.07 | 2.11 | 2.23 |
| 9 | 1.72 | 1.77 | 3.24 | 1.72 | 1.79 | 3.98 |
| 10 | 1.42 | 1.44 | 1.76 | 1.42 | 1.44 | 1.69 |
| 11 | 1.16 | 1.15 | −1.04 | 1.16 | 1.14 | −1.34 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, N.; Huang, P.; Ye, H.; Zeng, W.; Liu, Y.; Zheng, J.; Lin, E. Damage Detection for Offshore Wind Turbines Subjected to Non-Stationary Ambient Excitations: A Noise-Robust Algorithm Using Partial Measurements. Energies 2025, 18, 3644. https://doi.org/10.3390/en18143644
Yang N, Huang P, Ye H, Zeng W, Liu Y, Zheng J, Lin E. Damage Detection for Offshore Wind Turbines Subjected to Non-Stationary Ambient Excitations: A Noise-Robust Algorithm Using Partial Measurements. Energies. 2025; 18(14):3644. https://doi.org/10.3390/en18143644
Chicago/Turabian StyleYang, Ning, Peng Huang, Hongning Ye, Wuhua Zeng, Yusen Liu, Juhuan Zheng, and En Lin. 2025. "Damage Detection for Offshore Wind Turbines Subjected to Non-Stationary Ambient Excitations: A Noise-Robust Algorithm Using Partial Measurements" Energies 18, no. 14: 3644. https://doi.org/10.3390/en18143644
APA StyleYang, N., Huang, P., Ye, H., Zeng, W., Liu, Y., Zheng, J., & Lin, E. (2025). Damage Detection for Offshore Wind Turbines Subjected to Non-Stationary Ambient Excitations: A Noise-Robust Algorithm Using Partial Measurements. Energies, 18(14), 3644. https://doi.org/10.3390/en18143644