
Impedance Characteristic-Based Frequency-Domain Parameter Identification Method for Photovoltaic Controllers

 ,
,
Abstract
1. Introduction
- (1)
- Propose a mathematical model suitable for subsynchronous oscillations;
- (2)
- Analyze the sensitivity of the converter control parameters and identify the dominant parameters in different frequency bands;
- (3)
- A frequency-based parameter identification method is proposed based on the relationship between different frequency bands and dominant parameters. The effectiveness of the proposed method is then verified through a white-box model and controller from the manufacturer.
2. Electromagnetic Transient Model of Photovoltaic Power Generation Unit
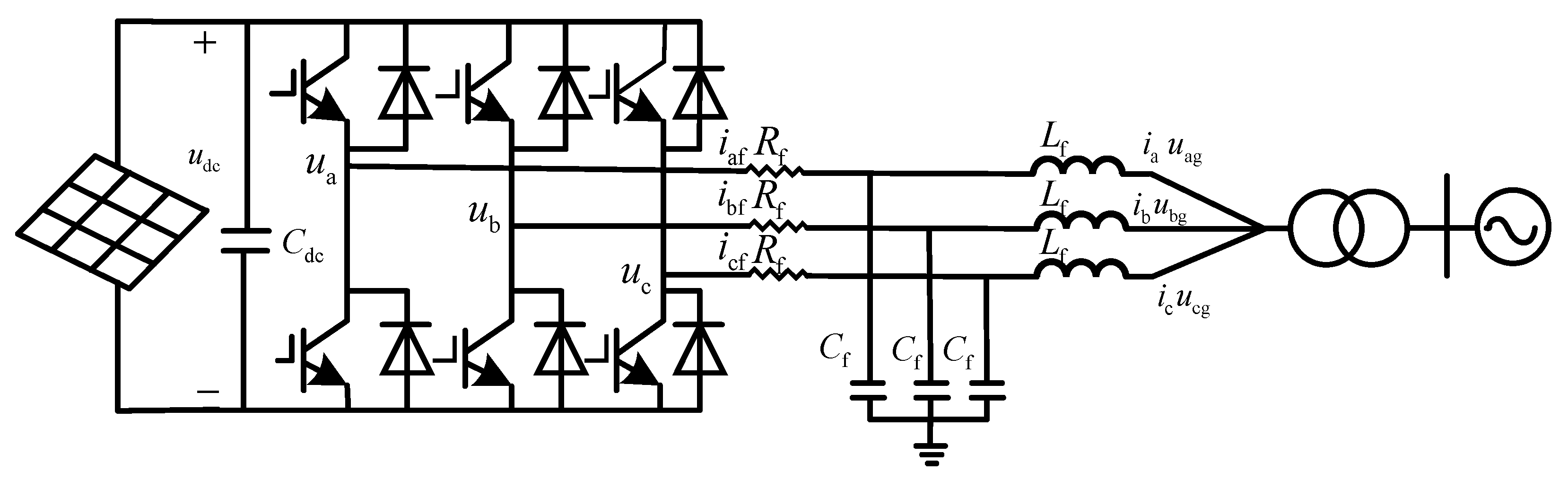
2.1. Main Circuit Topology
2.2. Grid-Connected Inverter Modeling
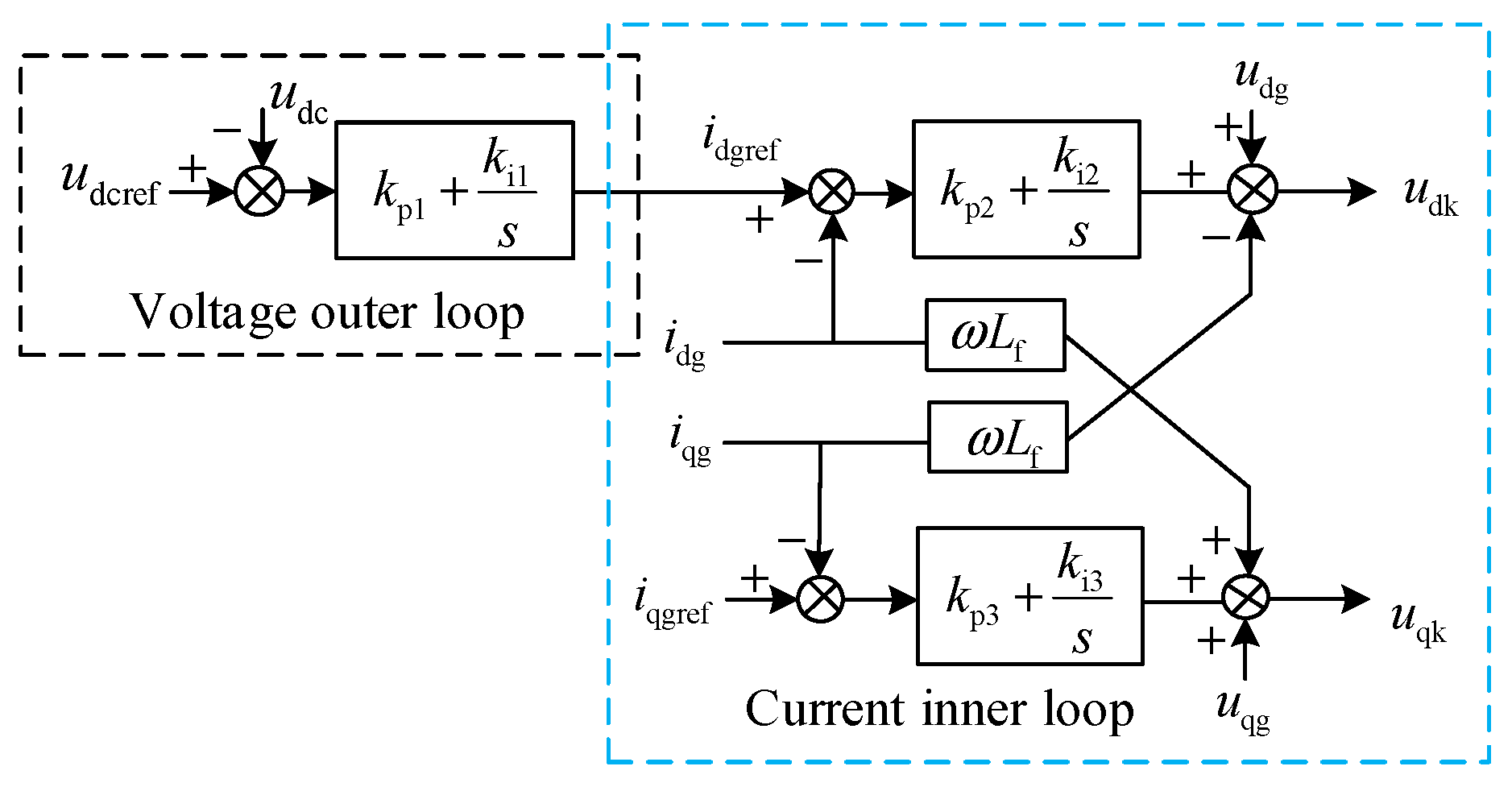
2.3. Controller Modeling
3. Frequency-Division Parameter Identification Principle
3.1. Controller Parameter Sensitivity Analysis
3.1.1. Sensitivity Analysis Methodology
- (1)
- Simulation Platform
- (2)
- Multi-Parameter Stepwise Testing
- (3)
- Time-Domain Response Analysis
- (4)
- Results Analysis
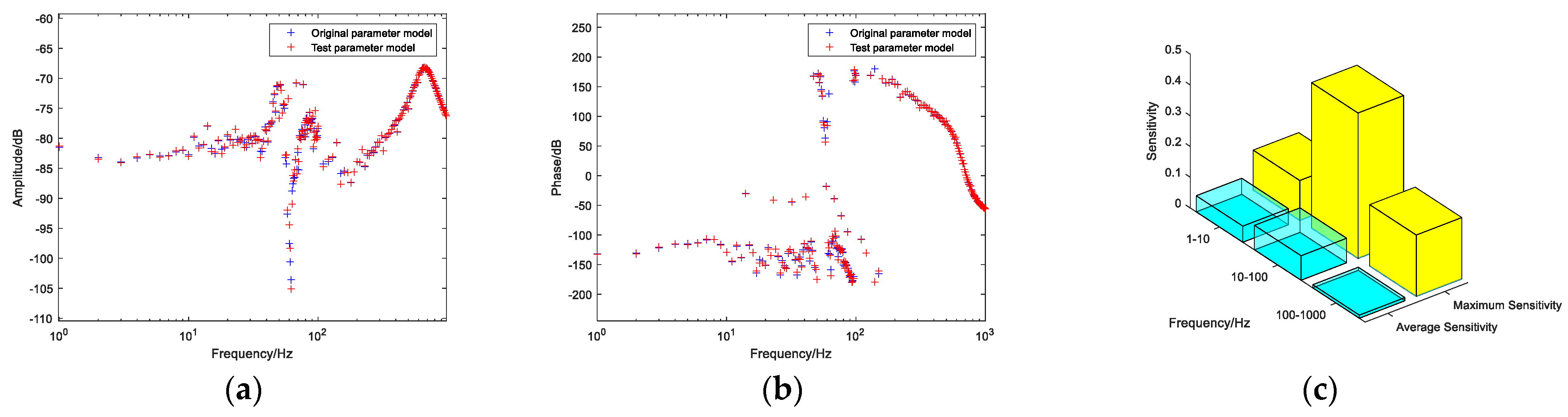
3.1.2. Sensitivity Analysis Results
- (1)
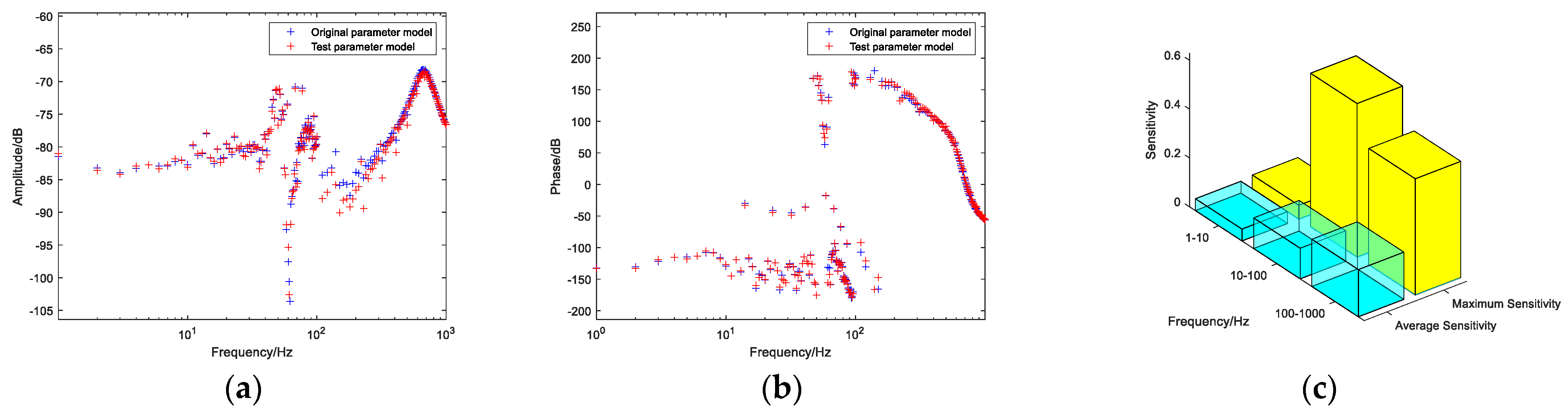
- The sensitivity test for the control parameter kp_v was conducted, and the test results are shown in Figure 3.
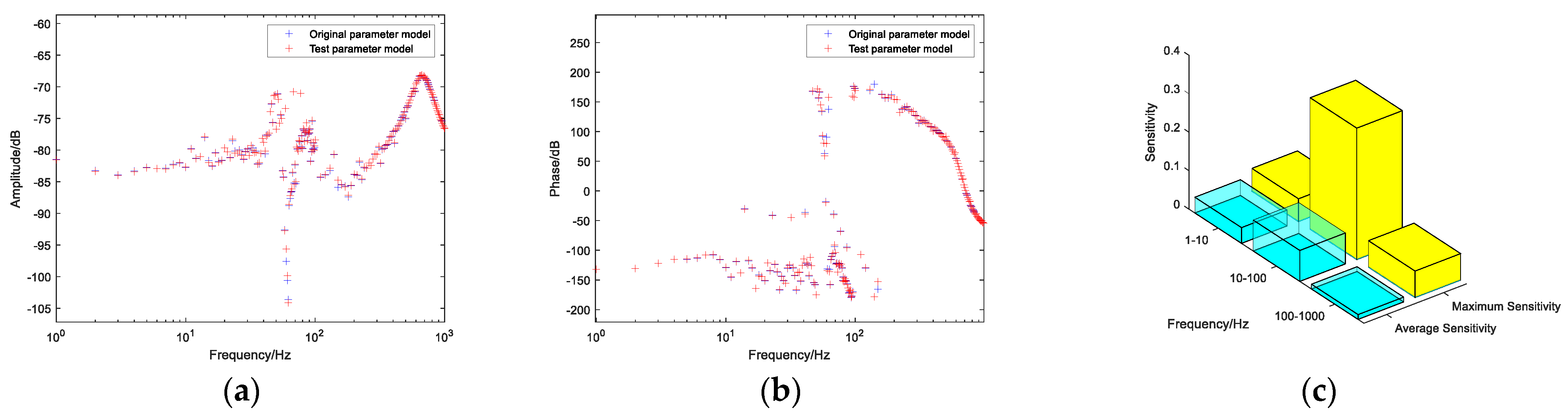
- (2)
- The sensitivity test for the control parameter ki_v was conducted, and the test results are shown in Figure 4.
- (3)
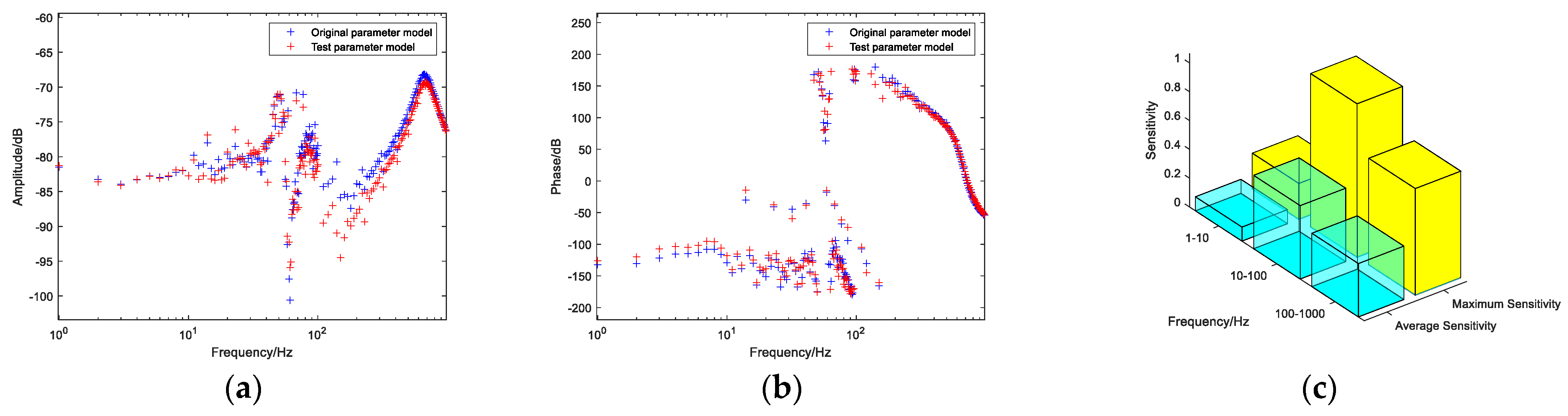
- The sensitivity test for the control parameter kp_idg was conducted, and the test results are shown in Figure 5.
- (4)
- The sensitivity test for the control parameter ki_idg was conducted, and the test results are shown in Figure 6.
- (5)
- The sensitivity test for the control parameter kp_iqg was conducted, and the test results are shown in Figure 7.
- (6)
- The sensitivity test for the control parameter ki_iqg was conducted, and the test results are shown in Figure 8.
3.2. Mechanism of Frequency-Division Parameter Identification
4. Impedance-Based Frequency-Division Parameter Identification Method for Photovoltaic Power Generation Unit Controllers
4.1. Parameter Identification Steps
- (1)
- Target Parameter Definition: Under the sub-synchronous and super-synchronous oscillation scenarios, multiple sets of controller parameters can be identified, such as voltage outer loop control parameters and current inner loop control parameters. Based on the content of this paper, the PI control parameters of the converter’s voltage outer loop and current inner loop are identified.
- (2)
- Sensitivity Analysis of Parameters to be Identified: Different manufacturers’ converter control parameters vary significantly. Low-sensitivity control parameters have a weaker impact on output characteristics, and changing their values does not significantly alter the output characteristic curve. Performing parameter identification on these parameters results in low iteration efficiency and unclear effects, making it difficult to determine typical values. Based on the sensitivity test results from the previous section, parameter identification is conducted for kp_v and kp_idg in the high-frequency range, while ki_v and ki_idg are identified in the medium- and low-frequency ranges.
- (3)
- Parameter Identification: This paper employs the DE (differential evolution) algorithm as the optimization method. By injecting small perturbation signals into the photovoltaic generation unit and performing Fast Fourier Transform calculations, the impedance characteristics under sub-/super-synchronous oscillation scenarios are obtained as observables. The identification process is completed when the error is minimized as the identification objective.
4.2. Optimization Algorithm
- (1)
- Population Initialization: Initialize the particle swarm parameters, set the parameter search boundaries, population size, crossover and mutation factors, and the number of iterations. Generate the initial population, where each element of an individual in the population represents a randomly generated control parameter value, typically within the defined search range of the control parameters.
- (2)
- Initial Optimal Solution Selection: Select the best individual from the initial population based on the target fitness as the initial global optimum.
- (3)
- Mutation Operation: Based on the initial global optimal individual, generate a mutant individual randomly. Select different individuals from the population at random, compute their differences, and generate a mutation vector.
- (4)
- Crossover Operation: Mix the mutation vector with the target individual to generate a new trial vector. This step involves gene exchange between the target individual and the mutant individual, enhancing solution diversity.
- (5)
- Selection Operation: Evaluate the fitness of the newly generated trial vector and the initial optimal individual, selecting the one with better fitness to be part of the new population.
- (6)
- Check whether the fitness of the new population is better than the global optimal individual, and update it accordingly.
- (7)
- After the iteration is completed, the optimal individual is obtained and output as the final identification result.
5. Simulation Verification
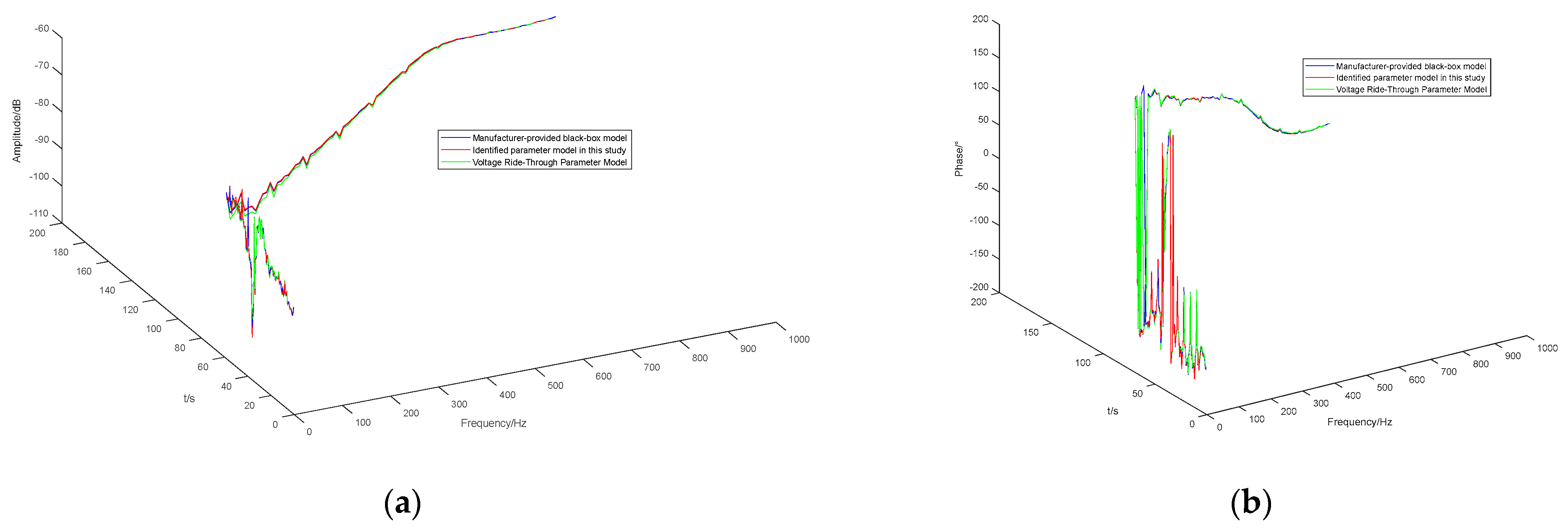
5.1. White-Box Electromagnetic Simulation Verification
- (1)
- Identification based on voltage ride-through characteristics
- (2)
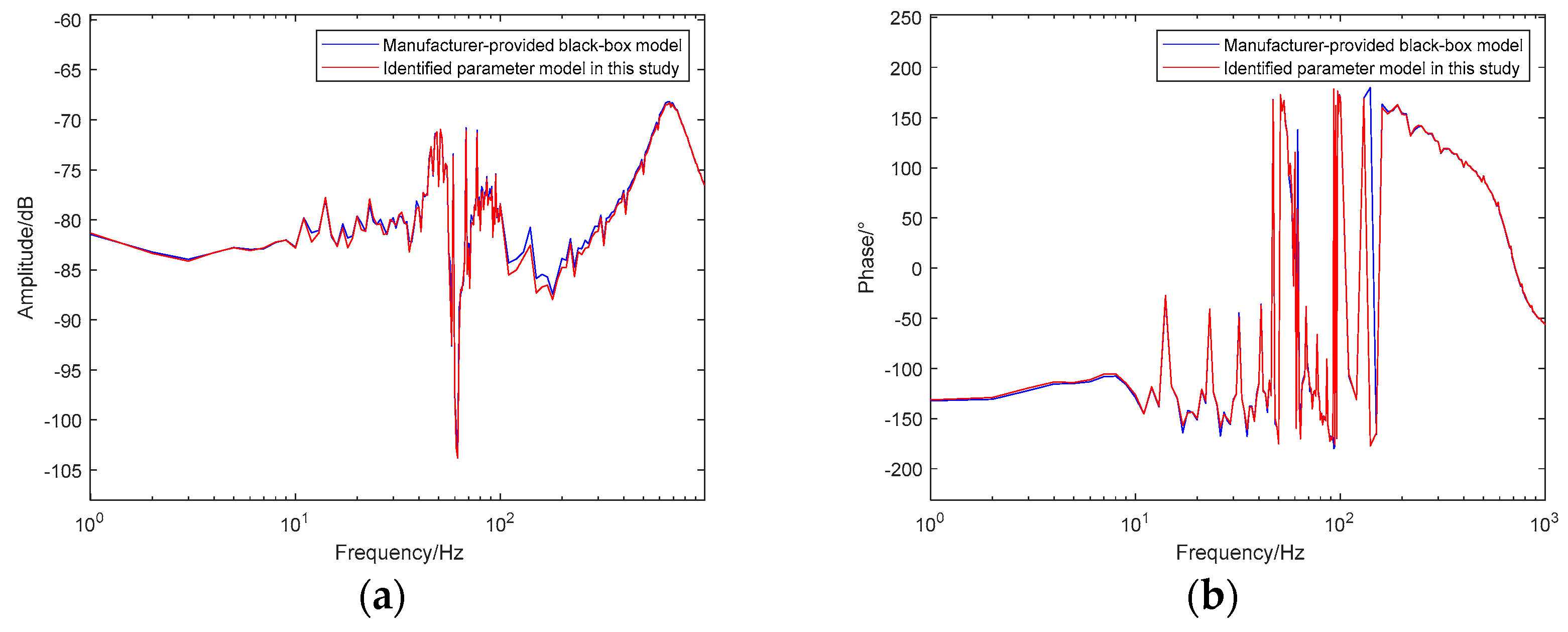
- Identification based on impedance characteristics
5.2. Semi-Physical Simulation Verification with Manufacturer’s Actual Controller
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, Y.; Fan, L.; Miao, Z. Wind in weak grids: Low-frequency oscillations, sub-synchronous oscillations, and torsional interactions. IEEE Trans. Power Syst. 2020, 35, 109–118. [Google Scholar] [CrossRef]
- Yang, C.; Ye, X. Analysis of the Development Situation of Distributed Photovoltaics in China. In Proceedings of the 2024 6th International Conference on Power and Energy Technology (ICPET), Beijing, China, 12–15 July 2024. [Google Scholar] [CrossRef]
- Jiang, Q.R.; Wang, Y.Z. Overview of the Analysis and Mitigation Methods of Electromagnetic Oscillations in Power Systems with High Proportion of Power Electronic Equipment. Proc. CSEE 2020, 40, 7185–7201. [Google Scholar]
- Duan, J.; Shi, D.; Diao, R.; Li, H.; Wang, Z.; Zhang, B.; Bian, D.; Yi, Z. Deep-reinforcement-learning-based autonomous voltage control for power grid operations. IEEE Trans. Power Syst. 2019, 35, 814–817. [Google Scholar] [CrossRef]
- Shafiullah, M.; Ahmed, S.D.; Al-Sulaiman, F.A. Grid Integration Challenges and Solution Strategies for Solar PV Systems: A Review. IEEE Access 2022, 10, 52233–52257. [Google Scholar] [CrossRef]
- Yang, D.Z.; Wang, L.P.; Zhang, J.; Wu, X.Q. Modeling of the large-scale distributed power supply and the analysis of grid-connected characteristics—(I) Photovoltaic plant thematic. Power Syst. Prot. Control. 2010, 38, 104–110. [Google Scholar]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A. Overview of control and grid synchronization for distributed power generation systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- Xiao, X.N.; Luo, C.; Liao, K.Y. Review of the Research on Subsynchronous Oscillation Issues in Electric Power System with Renewable Energy Sources. Trans. China Electrotech. Soc. 2017, 32, 85–97. [Google Scholar]
- Xue, A.C.; Fu, X.Y.; Qiao, D.K.; Wang, Y.J.; Wang, J.W. Review and prospect of research on sub-synchronous oscillation mechanism for power system with wind power participation. Electr. Power Autom. Equip. 2020, 40, 118–128. [Google Scholar]
- Xie, X.R.; Liu, H.K.; He, J.B.; Liu, H.; Liu, W. On New Oscillation Issues of Power Systems. Proc. CSEE 2018, 38, 2821–2828+3133. [Google Scholar]
- Adams, J.; Carter, C.; Huang, S.H. ERCOT Experience with sub-synchronous control interaction and proposed remediation. In Proceedings of the PES T&D, Orlando, FL, USA, 7–10 May 2012; pp. 1–5. [Google Scholar]
- Shair, J.; Xie, X.R.; Wang, L.P.; Liu, W.; He, J.B.; Liu, H. Overview of emerging subsynchronous oscillations in practical wind power systems. Renew. Sustain. Energy Rev. 2019, 99, 159–168. [Google Scholar] [CrossRef]
- Zhan, S.Q.; Wang, N.; Li, R.; Gao, B.F.; Shao, B.B.; Song, S.H. Sub-synchronous control interaction between direct-drive PMSG-based wind farms and compensated grids. Int. J. Electr. Power Energy Syst. 2019, 109, 609–617. [Google Scholar]
- Liang, X.; Karim, C.A.-B. Harmonics and Mitigation Techniques Through Advanced Control in Grid-Connected Renewable Energy Sources: A Review. IEEE Trans. Ind. Appl. 2018, 54, 3100–3111. [Google Scholar] [CrossRef]
- Xiong, X.Y.; Fu, H.J.; Xiong, H.Q.; Han, Y.S.; Sun, H.S.; Li, X.M. Risk Assessment Method for the Oscillation of Renewable Energy Grid-connected System Based on Frequency Domain Impedance. High Volt. Eng. 2024, 50, 3745–3758. [Google Scholar]
- Xiong, L.S.; Liu, X.K.; Zhuo, F.; Xie, Y.F.; Zhu, M.H.; Zhang, H.L. Small-Signal Modeling of Photovoltaic Power Generation System and Global Optimal Design for Its Controller Parameters. Power Syst. Technol. 2014, 38, 1234–1241. [Google Scholar]
- Shen, X.W.; Zheng, J.H.; Zhu, S.Z.; Zhu, L.Z.; Shi, T.; Qu, L.N. A dq axis decoupling parameter identification strategy for grid connected inverter controller of photovoltaic generation system. Autom. Electr. Power Syst. 2014, 38, 38–43. [Google Scholar]
- Xu, H.S.; Zeng, X.J.; Zhang, X.J.; Li, Y.R.; Xue, F.; Huang, Y.Z.; Li, C.Y. Multi-objective Step-by-step Identification Method of Control Parameters for DFIG Grid Side Converter Based on RT-LAB. Power Syst. Technol. 2025, 49, 771–780. [Google Scholar]
- Qi, Z.H.; Duan, J.D.; Gao, T.; Deng, J.; Zhang, Y.; Chen, J. Stepwise Identification Method of Converter Control Parameters for Doubly-Fed Induction Generators. Acta Energiae Solaris Sin. 2024, 45, 18–26. [Google Scholar]
- Ding, M.; Zhong, L.H.; Han, P.P.; Zhu, Q.L.; He, J. A practical method for parameter identification of wind power converter control link based on genetic algorithm. Electr. Technol. 2016, 35, 46–52+57. [Google Scholar]
- Shi, R.C.; Wang, Y.H.; Shu, D.W. Identification and Modeling Method of Direct Drive Wind Farm Converter Based on Likelihood Profile Analysis. Electr. Autom. 2022, 44, 16–19. [Google Scholar]
- Wang, F.; Yu, S.J.; Su, J.H.; Shen, Y.L. Research on Photovoltaic Grid-Connected Power System. Trans. China Electrotech. Soc. 2005, 26, 72–74+91. [Google Scholar]
- Dash, P.P.; Kazerani, M. Dynamic Modeling and Performance Analysis of a Grid-Connected Current-Source Inverter-Based Photovoltaic System. IEEE Trans. Sustain. Ener. 2011, 2, 443–450. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference Title | Proposed Method | Problem Addressed | Limitations |
|---|---|---|---|
| Reference [16] | Parameter Identification of Converter Dual-Loop Control Model with DQ-Axis Decoupling Based on Damped Least Squares | The time scale of the model does not match the time scale of the transient characteristic analysis, leading to discrepancies in parameters during multiple disturbance identifications, resulting in poor consistency of the identification results | The voltage outer loop parameter identification accuracy is high, while the current inner loop parameter identification accuracy is low |
| Reference [17] | Stepwise Identification Method Based on Random Forest Algorithm for Selecting Highly Correlated Observables | The issue of low parameter identification accuracy for the existing doubly fed wind turbine GSC LVRT and the neglect of high-sensitivity parameters during the identification process | The accuracy of the identification results has not been verified outside the 20–80% low voltage ride-through conditions |
| Reference [18] | Distributed Identification Method Based on Improved Grey Wolf Optimization Algorithm | The mutual interference caused by the cascading between the inner and outer loop PI controllers leads to inaccurate identification | It is not possible to guarantee the consistency of the identification accuracy of the inner and outer loop control parameters. |
| Reference [19] | Parameter Identification Method Based on Genetic Algorithm | During the identification process of the integral part, input and output data are typically transformed to the complex frequency domain, and the system is discretized. The use of genetic algorithm for identification leads to a significant computational burden, which in turn prolongs the identification time | In steady-state conditions, there is a certain error between the identification results and the original parameters, which requires further analysis |
| Reference [20] | Profile Likelihood Method | During the simulation process, the controller parameters of the large wind farm are unknown, and only the external characteristics and performance indicators of the wind turbines are provided, which makes the simulation study challenging | Parameter identification is more difficult under minor fault conditions |
| Parameter Name | Parameter Value |
|---|---|
| Power output of the generation unit/kW | 255 |
| DC-side voltage/kV | 1.5 |
| AC-side voltage/kV | 0.8 |
| Grid-side voltage/kV | 37 |
| Equivalent series resistance of the step-up transformer/Ω | 0.00431746 |
| Leakage inductance of the step-up transformer/H | 0.03475 |
| Filter inductance/H | 0.0003, 0.003 |
| Filter capacitance/F | 5.5953 × 10−5 |
| DC resistance/Ω | 5000 |
| DC capacitance/F | 0.2 |
| Parameter | kp_v | ki_v | kp_idg | ki_idg | kp_iqg | ki_iqg |
|---|---|---|---|---|---|---|
| Original value | −60 | −9000 | 3 | 3 | 3 | 3 |
| Identification Method | Parameter | Original Parameters | Identified Parameters | Error |
|---|---|---|---|---|
| The parameter identification method proposed in this paper | kp_v | −60 | −61.42 | 2.36% |
| ki_v | −9000 | −9063 | 0.7% | |
| kp_idg | 3 | 2.87 | 4.3% | |
| ki_idg | 3 | 3.119 | 3.97% | |
| High/low voltage ride-through parameter identification method | kp_v | −60 | −62.6 | 4.3% |
| ki_v | −9000 | −9143 | 1.59% | |
| kp_idg | 3 | 2.84 | 5.33% | |
| ki_idg | 3 | 3.27 | 7.67% | |
| Particle swarm parameter identification method | kp_v | −60 | −62.53 | 4.22% |
| ki_v | −9000 | −8934 | 0.73% | |
| kp_idg | 3 | 3.15 | 5% | |
| ki_idg | 3 | 2.883 | 3.9% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Y.; Zhou, X.; Zhu, Y.; Peng, J.; Luo, C.; Zhang, L.; Qi, J. Impedance Characteristic-Based Frequency-Domain Parameter Identification Method for Photovoltaic Controllers. Energies 2025, 18, 3118. https://doi.org/10.3390/en18123118
Tang Y, Zhou X, Zhu Y, Peng J, Luo C, Zhang L, Qi J. Impedance Characteristic-Based Frequency-Domain Parameter Identification Method for Photovoltaic Controllers. Energies. 2025; 18(12):3118. https://doi.org/10.3390/en18123118
Chicago/Turabian StyleTang, Yujia, Xin Zhou, Yihua Zhu, Junzhen Peng, Chao Luo, Li Zhang, and Jinling Qi. 2025. "Impedance Characteristic-Based Frequency-Domain Parameter Identification Method for Photovoltaic Controllers" Energies 18, no. 12: 3118. https://doi.org/10.3390/en18123118
APA StyleTang, Y., Zhou, X., Zhu, Y., Peng, J., Luo, C., Zhang, L., & Qi, J. (2025). Impedance Characteristic-Based Frequency-Domain Parameter Identification Method for Photovoltaic Controllers. Energies, 18(12), 3118. https://doi.org/10.3390/en18123118