
The Impact of Terminal-Voltage Control on the Equilibrium Points and Small-Signal Stability of GFL-VSC Systems


Abstract
1. Introduction
2. Description of GFL-VSC-Based Power System
2.1. System Topology
2.2. Nonlinear Modeling of GFL-VSC System
3. Equilibrium Point Analysis
3.1. Case A: Considering TVC Dynamics
3.2. Case B: Considering TVC Rapid Responses
3.3. Case C: Considering TVC Slow Responses
4. Small-Signal Stability Analysis
4.1. The Analysis of Case A: Considering TVC Dynamics
4.2. The Analysis of Case B: Considering TVC Rapid Responses
4.3. The Analysis of Case C: Considering TVC Slow Responses
5. Simulation Validation
5.1. Validation of Root Locus Plots
5.2. Verification of Time-Domain Simulation
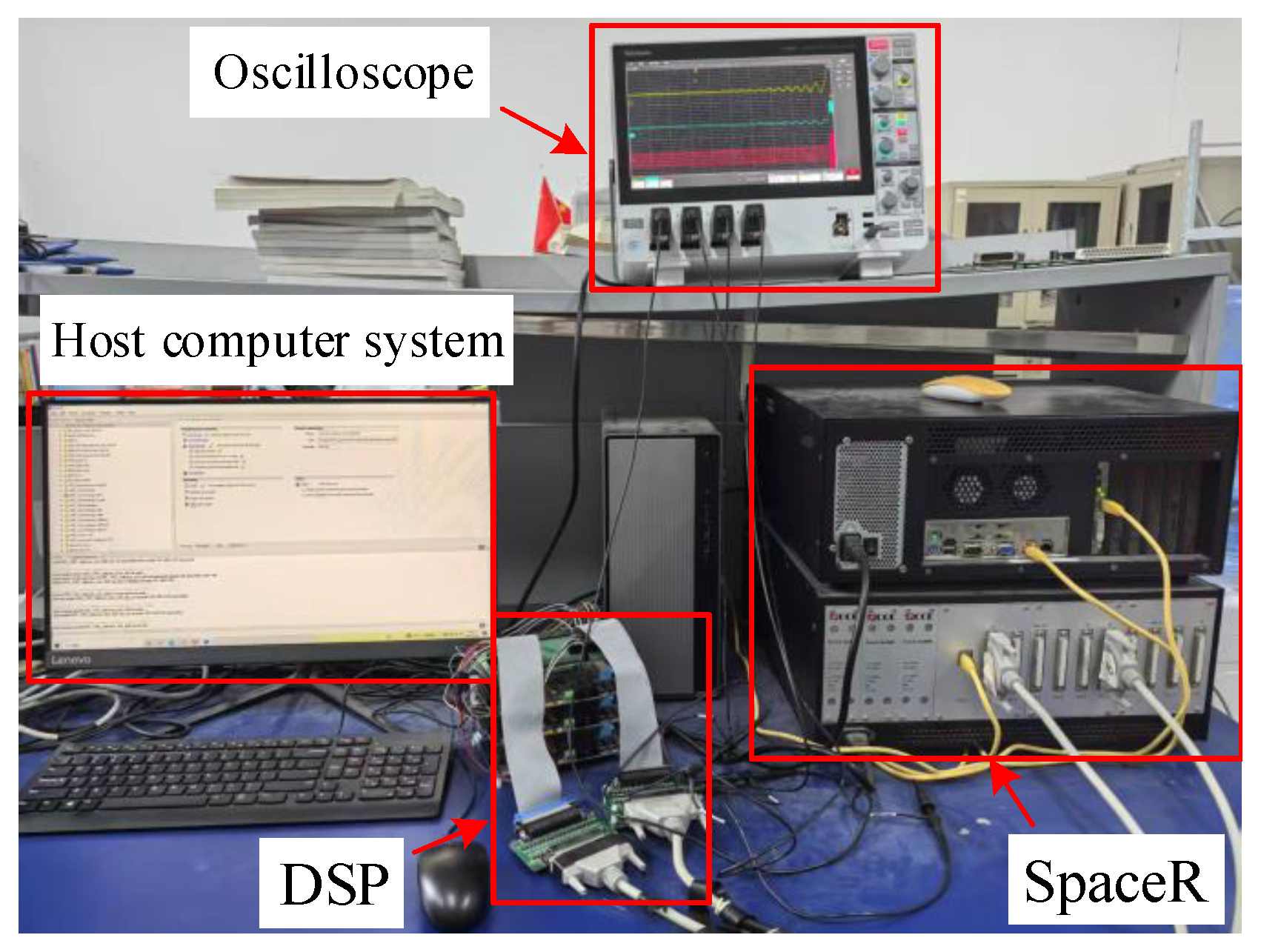
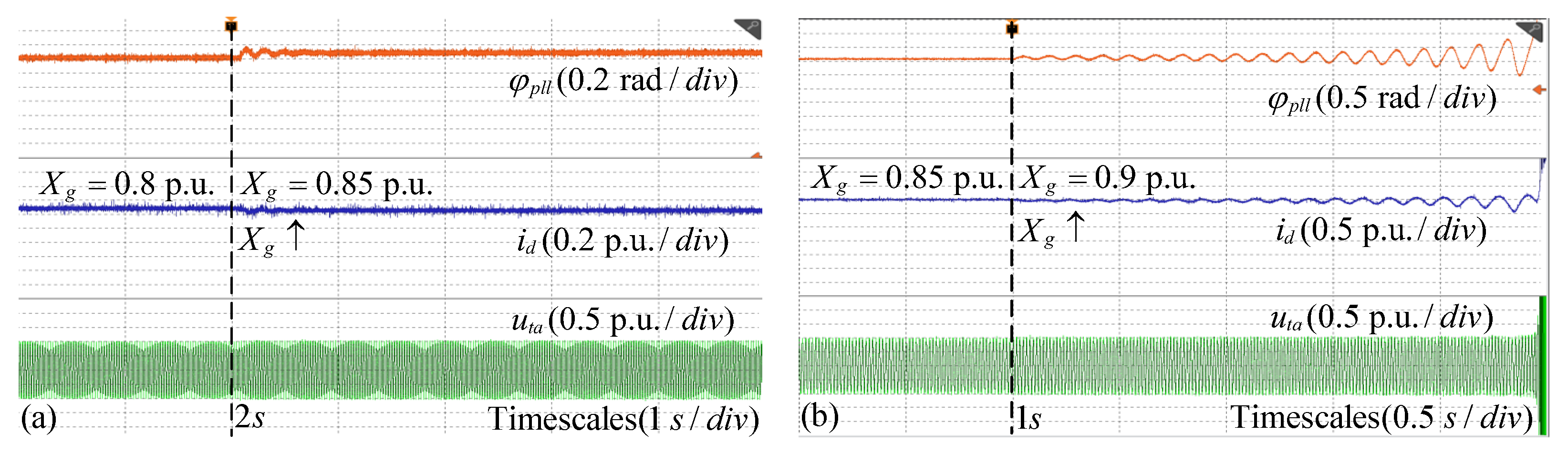
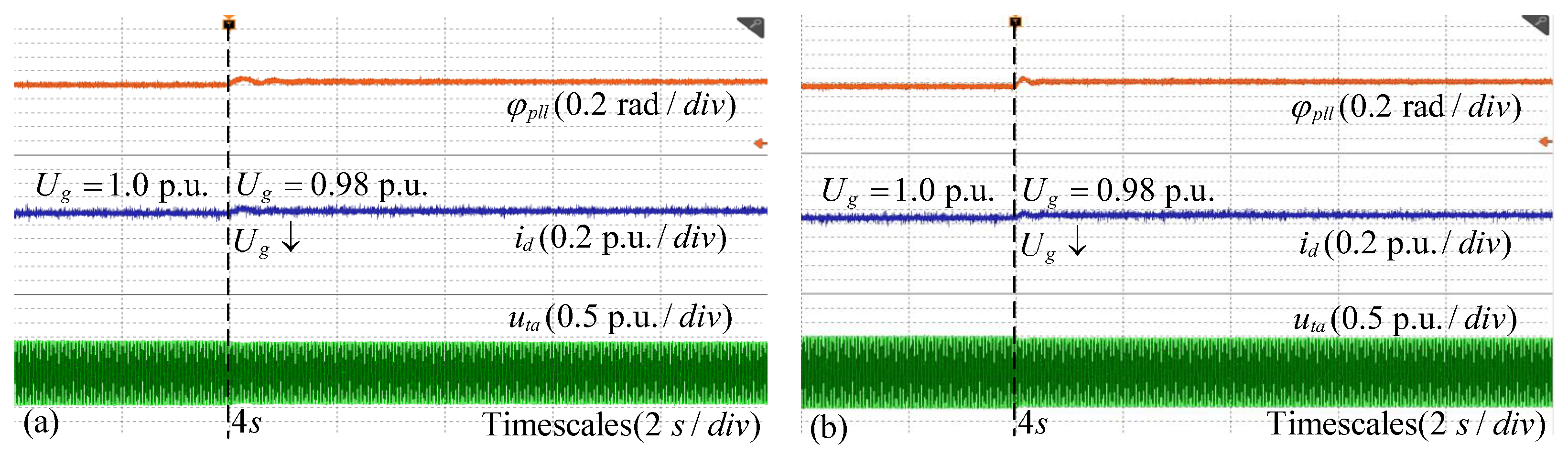
6. Experimental Verification
7. Conclusions
- (1)
- Different response speeds of TVC lead to distinct dynamic behaviors via different treatments of terminal voltage and reactive current in the modeling of the GFL-VSC system.
- (2)
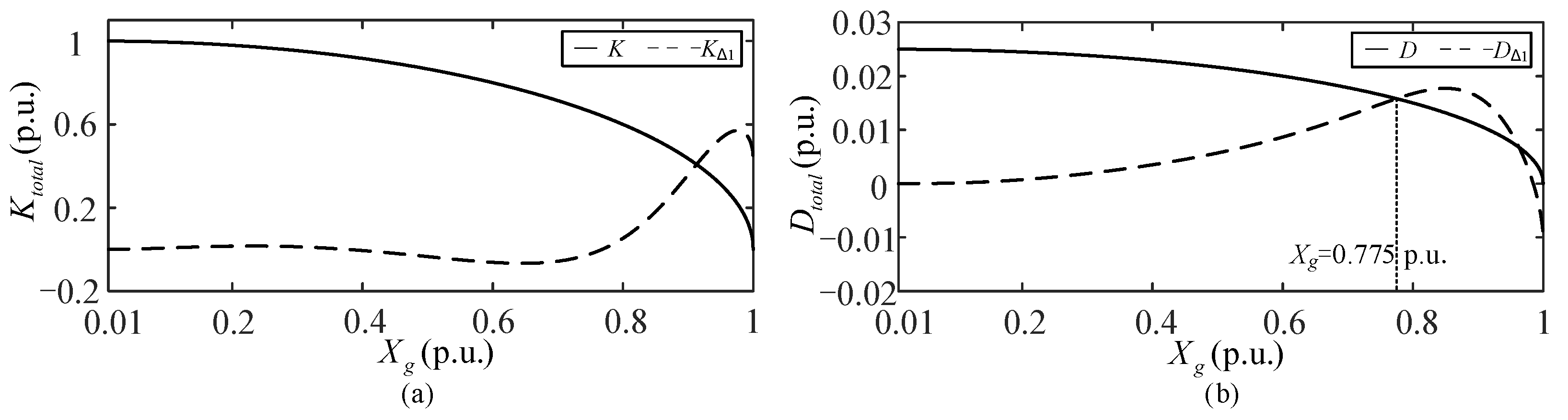
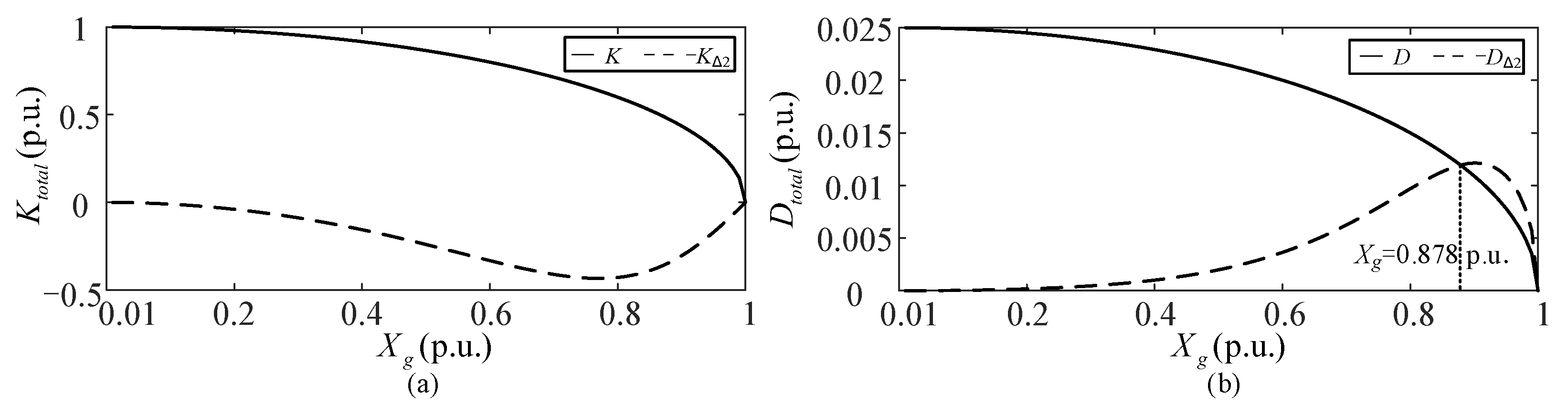
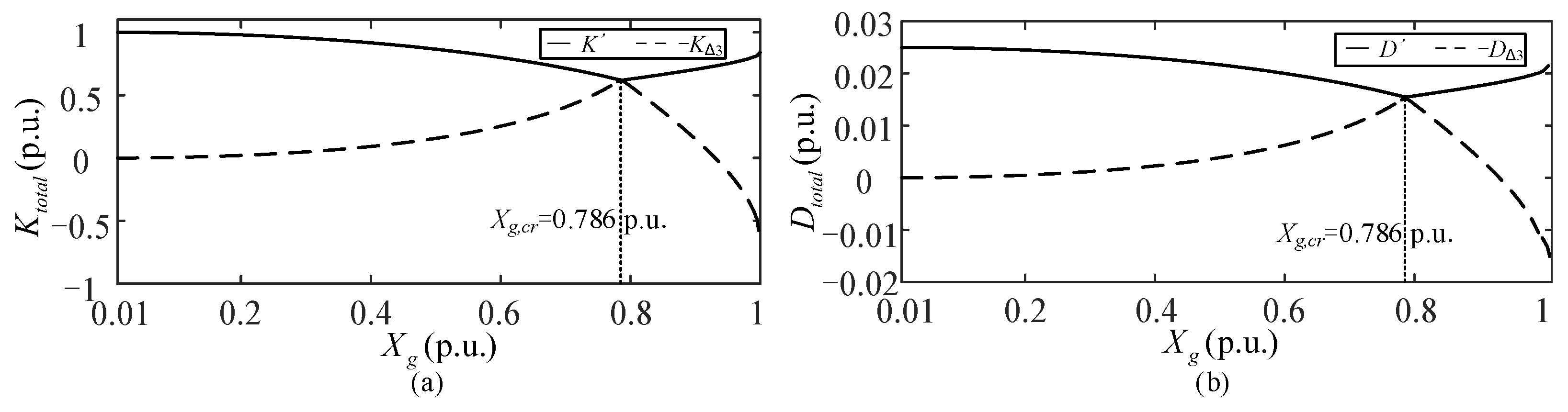
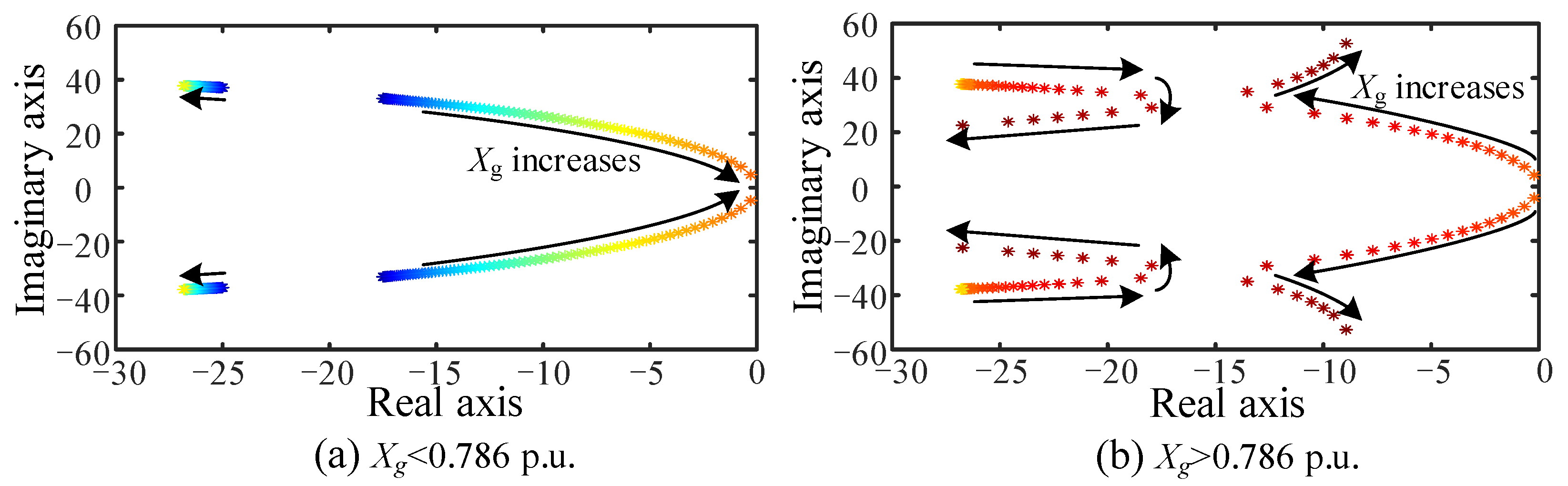
- A comparative study between the scenarios of considering TVC dynamics and TVC rapid responses reveals that their impacts on the system are similar. This is because TVC participates in the dynamical process, constraining the equilibrium point of the active current fixed as a constant value, which is independent of line reactance . As increases, TVC dynamics introduce additional negative damping, causing to undergo sub-critical Hopf bifurcation and leading to oscillatory instability in weak grids. Moreover, comparing their critical line reactances, when considering the TVC rapid response, the system exhibits a slightly larger stable region under weak grids.
- (3)
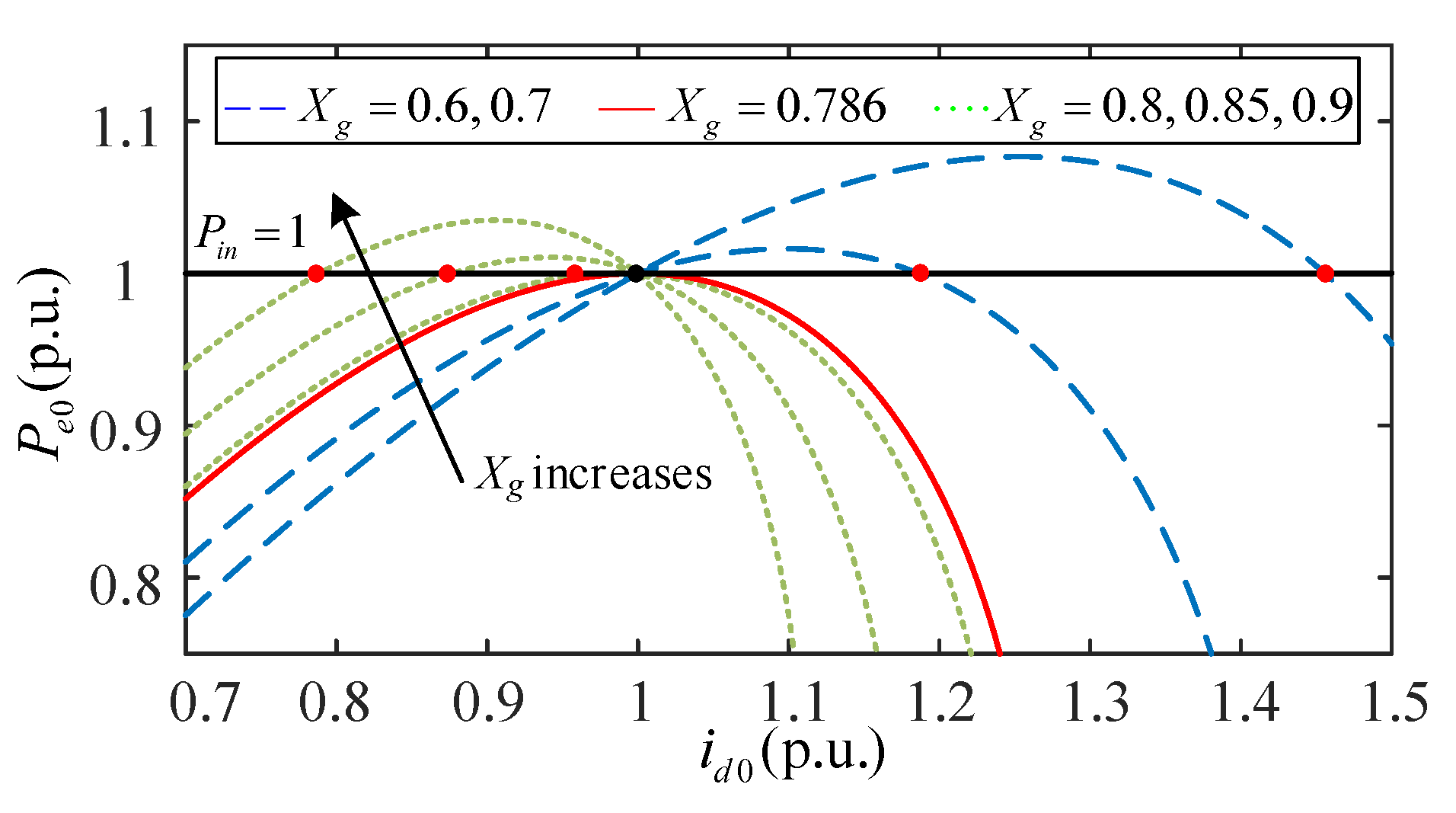
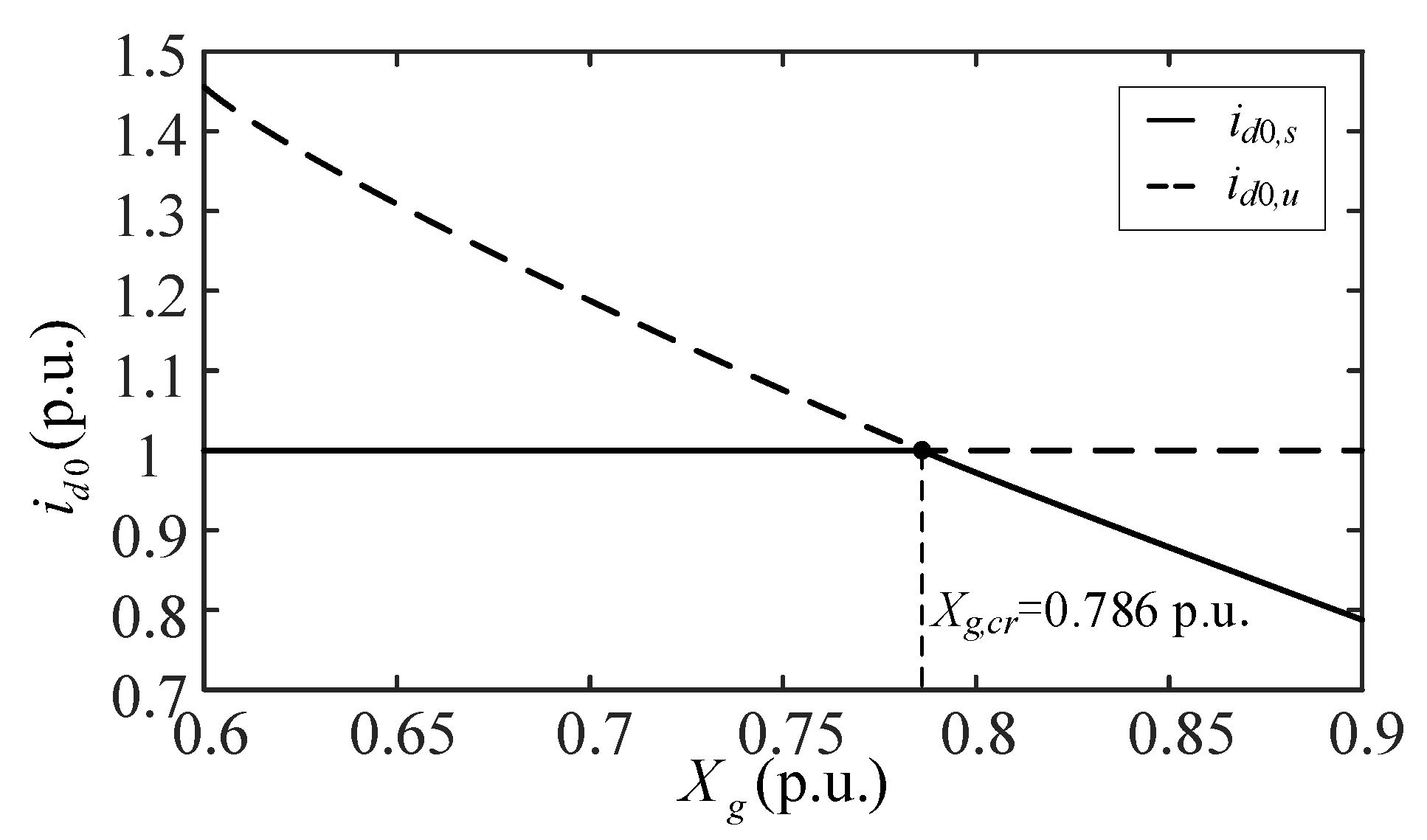
- In contrast, for the scenario of considering TVC slow responses, the dynamics are completely different. By solving the relationships between the steady-state value of the active power and , as well as and , the stable EP and the unstable EP are obtained. It is found that when , 1.0 p.u., identical to that in the previous two scenarios. However, when , the system undergoes trans-critical bifurcation, and the other EP 1.0 p.u. becomes stable. This stability transformation of the two EPs eliminates the negative damping effect and ensures the system is always small-signal stable. These novel phenomena have been completely ignored in all previous studies in the literature.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| GFL | Grid-following |
| VSC | Voltage source converter |
| PLL | Phase-locked loop |
| DVC | DC-voltage control |
| TVC | Terminal-voltage control |
| ACC | Alternating current control |
| EP | Equilibrium point |
| Grid inductance and filter inductance | |
| Infinite bus voltage | |
| DC capacitor voltage and terminal voltage | |
| The coordinate components of terminal voltage | |
| I | Output current |
| , | The coordinate components of output current |
| Electromagnetic power | |
| The angle of terminal voltage | |
| The output angle and frequency of PLL | |
| The synchronous frequency of grid | |
| M | Inertia, damping and synchronization coefficients |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Variable | Numerical Value |
|---|---|---|
| Rated Parameter | Rated Capacity | 2 MVA |
| Nominal Voltage | 690 V | |
| Rated Frequency | 50 Hz | |
| Circuit Parameter | Filter Inductance | 75.77 H (0.1 p.u.) |
| Capacitor | 1337 F (0.1 p.u.) | |
| Gird Inductance | 378.85 H (0.5 p.u.) | |
| System Parameter | Input power | 2 MW (1.0 p.u.) |
| Reference DC voltage | 1400 V (1.0 p.u.) | |
| Reference voltage | 690 V (1.0 p.u.) | |
| Grid voltage | 690 V (1.0 p.u.) | |
| Controller Parameter | PI Parameters of PLL / | 50/2000 |
| PI Parameters of DVC / | 3.5/140 | |
| PI Parameters of TVC / | 1/100 | |
| PI Parameters of ACC / | 1/670 |
Appendix B
Appendix C
Appendix C.1. The Detailed Derivation Process of Case A
Appendix C.2. The Detailed Derivation Process of Case B
Appendix C.3. The Detailed Derivation Process of Case C
References
- Operation of Renewable Energy Connected to the Grid in 2024; National Energy Administration of the People’s Republic of China: Beijing, China, 2025.
- Zhu, B.; Liu, J.; Wang, S.; Li, Z. Enhanced Models for Wind, Solar Power Generation, and Battery Energy Storage Systems Considering Power Electronic Converter Precise Efficiency Behavior. Energies 2025, 18, 1320. [Google Scholar] [CrossRef]
- Ji, X.; Liu, D.; Jiang, K.; Zhang, Z.; Yang, Y. Small-Signal Stability of Hybrid Inverters with Grid-Following and Grid-Forming Controls. Energies 2024, 17, 1644. [Google Scholar] [CrossRef]
- Fu, X.; Huang, M.; Tse, C.K.; Yang, J.; Ling, Y.; Zha, X. Synchronization Stability of Grid-Following VSC Considering Interactions of Inner Current Loop and Parallel-Connected Converters. IEEE Trans. Smart Grid 2023, 14, 4230–4241. [Google Scholar] [CrossRef]
- Zhou, Y.; Xin, H.; Wu, D.; Liu, F.; Li, Z.; Wang, G.; Yuan, H.; Ju, P. Small-Signal Stability Assessment of Heterogeneous Grid-Following Converter Power Systems Based on Grid Strength Analysis. IEEE Trans. Power Syst. 2023, 38, 2566–2579. [Google Scholar] [CrossRef]
- Hu, B.; Zhao, C.; Sahoo, S.; Wu, C.; Chen, L.; Nian, H.; Blaabjerg, F. Synchronization Stability Enhancement of Grid-Following Converter Under Inductive Power Grid. IEEE Trans. Energy Convers. 2023, 38, 1485–1488. [Google Scholar] [CrossRef]
- Zhang, Y.; Pen, H.; Zhang, X. Stability Control of Grid-Connected Converter Considering Phase-Locked Loop Frequency Coupling Effect. Energies 2024, 17, 3438. [Google Scholar] [CrossRef]
- Liu, Y.; Zhu, L.; Xu, X.; Li, D.; Liang, Z.; Ye, N. Transient Synchronization Stability in Grid-Following Converters: Mechanistic Insights and Technological Prospects—A Review. Energies 2025, 18, 1975. [Google Scholar] [CrossRef]
- Wang, X.; Taul, M.G.; Wu, H.; Liao, Y.; Blaabjerg, F.; Harnefors, L. Grid-Synchronization Stability of Converter-Based Resources—An Overview. IEEE Open J. Ind. Appl. 2020, 1, 115–134. [Google Scholar] [CrossRef]
- Xie, Q.; Xiao, X.; Zheng, Z.; Wang, Y.; Song, D.; Du, K.; Zou, Y.; Zhang, J. An improved reactive power control strategy for LCC-HVDC to mitigate sending end transient voltage disturbance caused by commutation failures. Int. J. Electr. Power Energy Syst. 2023, 146, 108706. [Google Scholar] [CrossRef]
- Wang, X.; Wu, H.; Wang, X.; Dall, L.; Kwon, J.B. Transient Stability Analysis of Grid-Following VSCs Considering Voltage-Dependent Current Injection During Fault Ride-Through. IEEE Trans. Energy Convers. 2022, 37, 2749–2760. [Google Scholar] [CrossRef]
- Zhang, Y.; Han, M.; Zhan, M. The Concept and Understanding of Synchronous Stability in Power Electronic-Based Power Systems. Energies 2023, 16, 2923. [Google Scholar] [CrossRef]
- Yuan, H.; Xin, H.; Huang, L.; Wang, Z.; Wu, D. Stability Analysis and Enhancement of Type-4 Wind Turbines Connected to Very Weak Grids Under Severe Voltage Sags. IEEE Trans. Energy Convers. 2019, 34, 838–848. [Google Scholar] [CrossRef]
- Pei, J.; Yao, J.; Liu, R.; Zeng, D.; Sun, P.; Zhang, H.; Liu, Y. Characteristic Analysis and Risk Assessment for Voltage-Frequency Coupled Transient Instability of Large-Scale Grid-Connected Renewable Energy Plants During LVRT. IEEE Trans. Ind. Electron. 2020, 67, 5515–5530. [Google Scholar] [CrossRef]
- He, X.; Geng, H. PLL Synchronization Stability of Grid-Connected Multi-Converter Systems. IEEE Trans. Ind. Appl. 2021, 58, 830–842. [Google Scholar] [CrossRef]
- Kang, Y.; Lin, X.; Zheng, Y.; Quan, X.; Hu, J.; Yuan, X. The Static Stable-limit and Static Stable-working Zone for Single-machine Infinite-bus System of Renewable-energy Grid-connected Converter. Proc. CSEE 2020, 40, 4506–4515. (In Chinese) [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Y.; Gu, Y.; Green, T. Consideration of Control-Loop Interaction in Transient Stability of Grid-Following Inverters using Bandwidth Separation Method. In Proceedings of the 2023 11th International Conference on Power Electronics and ECCE Asia (ICPE 2023—ECCE Asia), Jeju Island, Republic of Korea, 22–25 May 2023; pp. 1294–1301. [Google Scholar] [CrossRef]
- Wan, Y.; Wang, J.; Nan, D.; Zhang, B.; Xiong, X. Power Transfer Capacity Evaluation of Renewable Energy Delivery System Based on Grid-connected Inverter. Power Syst. Technol. 2024, 48, 171–183. (In Chinese) [Google Scholar] [CrossRef]
- Yang, Z.; Ma, R.; Cheng, S.; Zhan, M. Nonlinear Modeling and Analysis of Grid-Connected Voltage-Source Converters Under Voltage Dips. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 3281–3292. [Google Scholar] [CrossRef]
- Xiong, L.; Zhuo, F.; Wang, F.; Liu, X.; Chen, Y.; Zhu, M. Static Synchronous Generator Model: A New Perspective to Investigate Dynamic Characteristics and Stability Issues of Grid-Tied PWM Inverter. IEEE Trans. Power Electron. 2015, 31, 6264–6280. [Google Scholar] [CrossRef]
- Hong, Z.; Cheng, M.; Zhan, M.; Yu, J.; Zhu, Y.; Wu, M. Interaction Analysis Between PLL-based Synchronization and Power Balance of Grid-Following Converters Tied to AC System. Proc. CSEE 2025, 1–16. (In Chinese) [Google Scholar]
- Wang, D.; Liang, L.; Shi, L.; Hu, J.; Hou, Y. Analysis of Modal Resonance between PLL and DC-Link Voltage Control in Weak-Grid Tied VSCs. IEEE Trans. Power Syst. 2018, 34, 1127–1138. [Google Scholar] [CrossRef]
- Ma, R.; Zhang, Y.; Zhan, M.; Cao, K.; Liu, D.; Jiang, K.; Cheng, S. Dominant Transient Equations of Grid-Following and Grid-Forming Converters by Controlling-Unstable-Equilibrium-Point-Based Participation Factor Analysis. IEEE Trans. Power Syst. 2023, 39, 4818–4834. [Google Scholar] [CrossRef]
- Yuan, H.; Yuan, X.; Hu, J. Modeling of Grid-Connected VSCs for Power System Small-Signal Stability Analysis in DC-Link Voltage Control Timescale. IEEE Trans. Power Syst. 2017, 32, 3981–3991. [Google Scholar] [CrossRef]
- Canay, I.M. A Novel Approach to the Torsional Interaction and Electrical Damping of the Synchronous Machine. Part I: Theory. IEEE Power Eng. Rev. 1982, PER-2, 24. [Google Scholar] [CrossRef]
- Canay, I.M. A Novel Approach to the Torsional Interaction and Electrical Damping of the Synchronous Machine Part II: Application to an arbitrary network. IEEE Trans. Power Appar. Syst. 1982, PAS-101, 3639–3647. [Google Scholar] [CrossRef]






| Case A: Considering TVC Dynamics | Case B: Considering TVC Rapid Response | Case C: Considering TVC Slow Response | |
|---|---|---|---|
| Model difference | is controlled to track while outputting | = | = |
| Equilibrium point of active current | = 1 | = 1 when < ; changes when > | |
| Bifurcation form with respect to | Sub-critical Hopf bifurcation | Trans-critical bifurcation | |
| Synchronization and damping coefficients | becomes negative under weak gird | Always positive | |
| Small-signal stability with respect to | Unstable in weak girds | Always stable | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Yao, X.; Fu, C.; Zhan, M.; Bao, B. The Impact of Terminal-Voltage Control on the Equilibrium Points and Small-Signal Stability of GFL-VSC Systems. Energies 2025, 18, 3023. https://doi.org/10.3390/en18123023
Li S, Yao X, Fu C, Zhan M, Bao B. The Impact of Terminal-Voltage Control on the Equilibrium Points and Small-Signal Stability of GFL-VSC Systems. Energies. 2025; 18(12):3023. https://doi.org/10.3390/en18123023
Chicago/Turabian StyleLi, Shun, Xing Yao, Cong Fu, Meng Zhan, and Bo Bao. 2025. "The Impact of Terminal-Voltage Control on the Equilibrium Points and Small-Signal Stability of GFL-VSC Systems" Energies 18, no. 12: 3023. https://doi.org/10.3390/en18123023
APA StyleLi, S., Yao, X., Fu, C., Zhan, M., & Bao, B. (2025). The Impact of Terminal-Voltage Control on the Equilibrium Points and Small-Signal Stability of GFL-VSC Systems. Energies, 18(12), 3023. https://doi.org/10.3390/en18123023