
Control of Wind-Power Systems Operating at Variable Wind Speeds to Optimize Energy Capture




Abstract
1. Introduction
- -
- Use of a low-power, no-load turbine at the mechanical angular velocity [9];
- -
- Nonlinear mapping, which involves measuring rotor speed, tilt angle and aerodynamic torque as perceived by the disturbance observer [10];
- -
- The assessment of turbine torque and rotor speed is conducted utilizing sliding mode observers grounded in nonlinear control theory, with the aim of calculating the effective wind velocity by reversing the aerodynamic model of the turbine [11];
- -
- The original signal is decomposed into multiple sequences, utilizing deep learning prediction models and neural network optimization [12].
2. Establishing the Mathematical Model for the Turbine
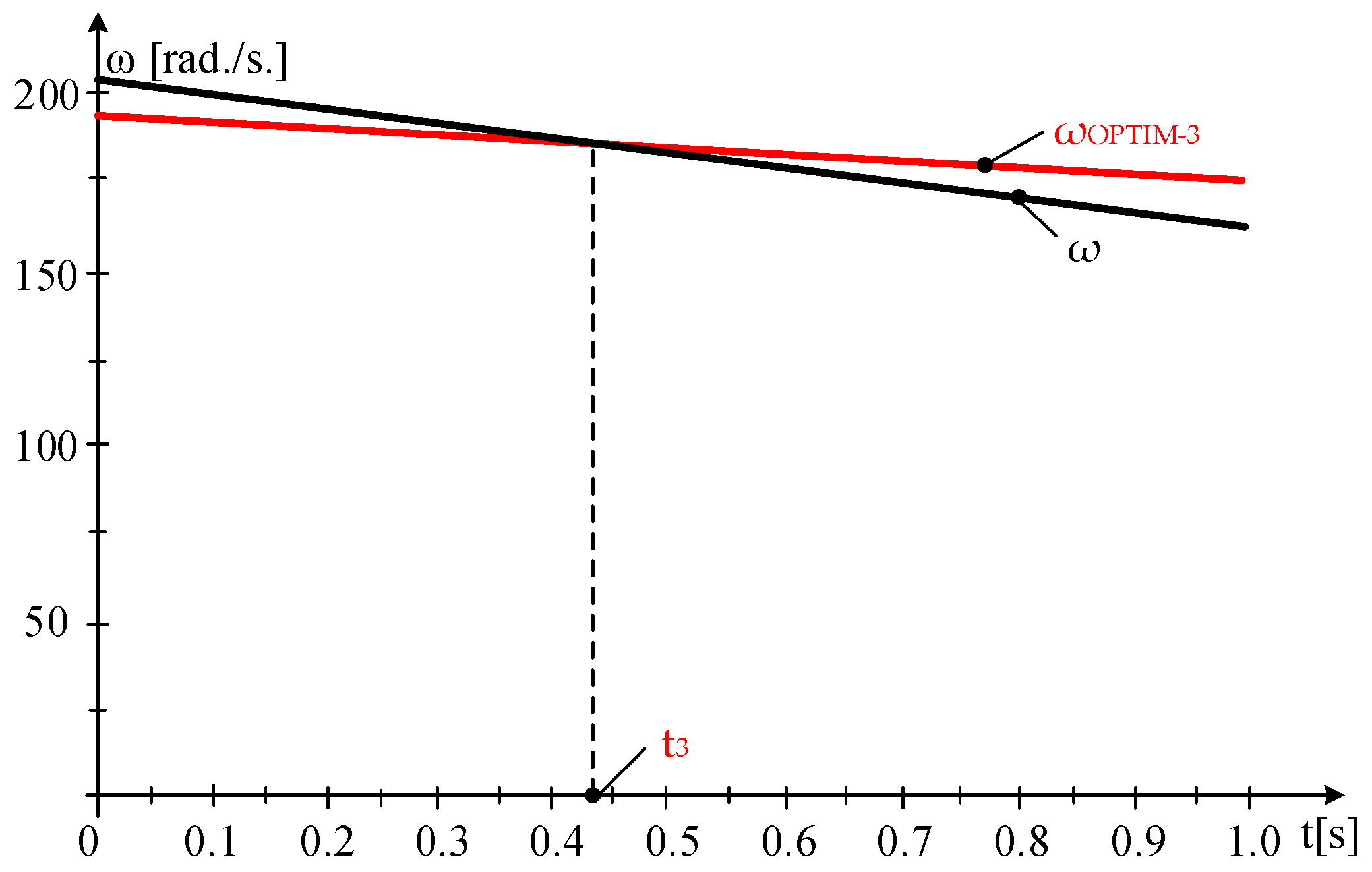
- The maximum power value is achieved at ωOPTIM by setting the derivative of power to zero:
- 2.
- The maximum power value of the WT corresponds to the optimal MAS, ωOPTIM, and is:
- 3.
- The ratio ωOPTIM to ωMAXIM yields Equation (3). This is due to the fact that the power WT is zero:
3. Changing the Power of the Electric Generator in Relation to Measured Wind
- Case Study 1
3.1. Achieving the Maximum Power Point of the Wind Turbine System
- Disconnection of the generator from the network (a slower method).
- Converting the generator to operate in motor mode (a faster method).
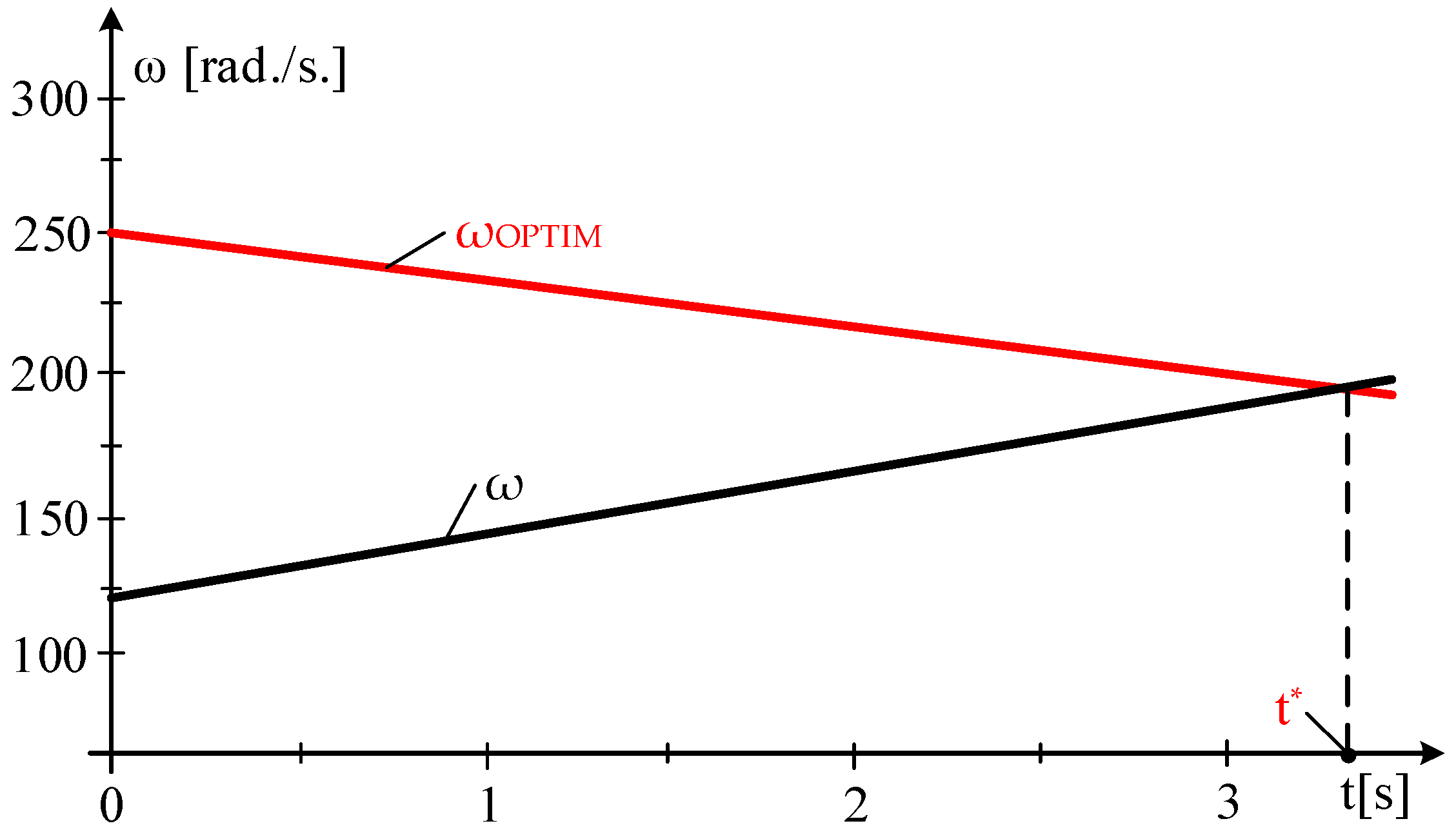
3.2. Sustaining the Wind System at the Turbine’s Maximum Power Point
- With MM-WT:
- By integrating the kinetic momentum equation multiplied with ω, we derive the kinetic energies:
3.2.1. Sample Interval Value
- J = 511.92 [kg·m2]—equivalent moment of inertia.
- PN = 2.5 [MW] = 2,500,000 [W]—rated power.
- ωN = 157.08 [rad/s]—nominal mechanical angular speed.
- H-value:
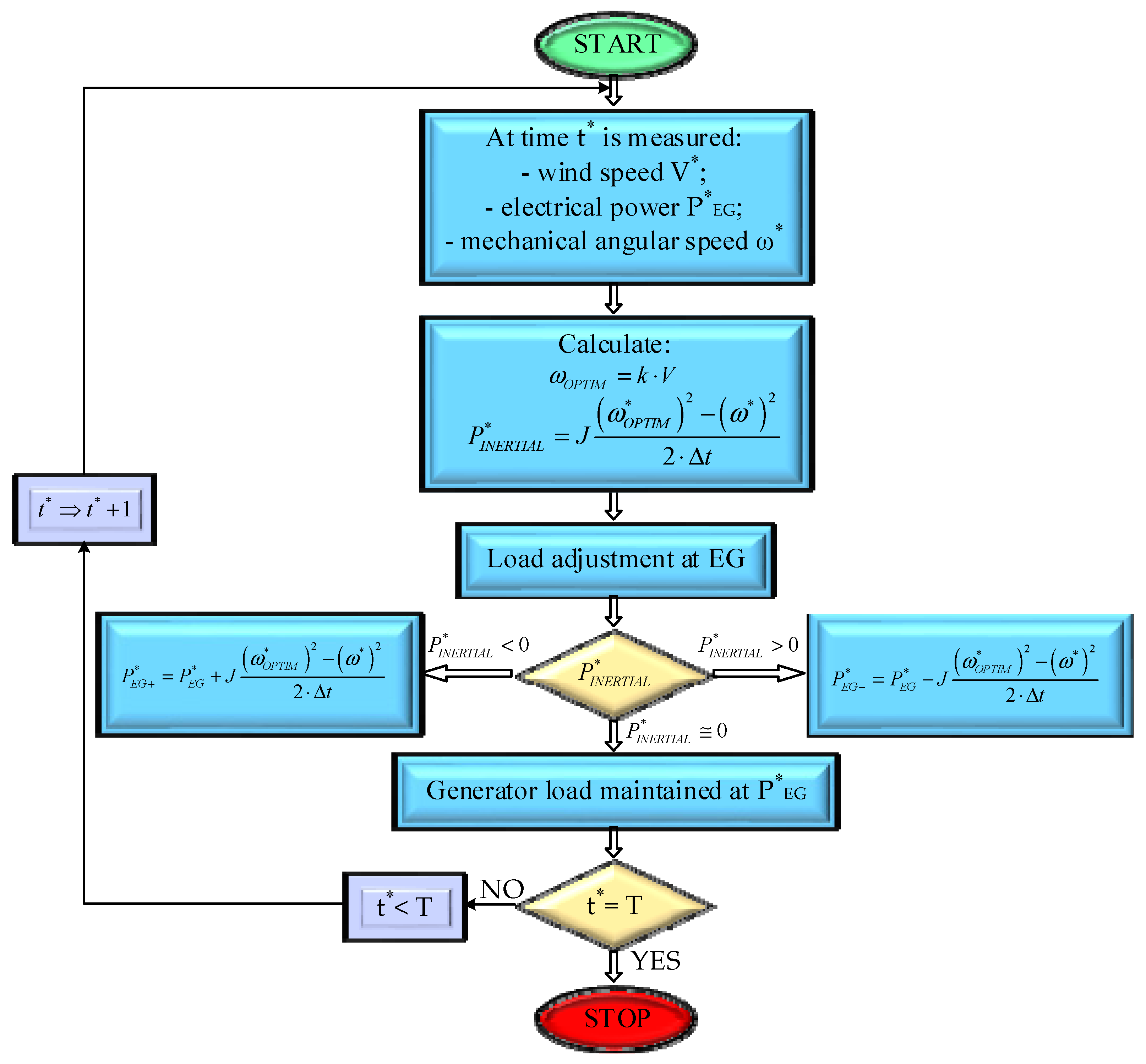
3.2.2. Control Algorithm
- Step 1—the following are measured: wind speed, V*, generator power P*EG and speed, ω*;
- Step 2—the optimal mechanical angular velocity, ω*OPTIM, is calculated using the formula ω*OPTIM = kP⋅V*, along with the inertial power.
- Step 3—The loading at EG is adjusted according to the sign of the inertial power value, P*INERTIAL, as follows:
- P*INERTIAL < 0, results in an increase in the EG load raised to the power of:
- 2.
- P*INERTIAL > 0, the load on EG decreases at the rate of:
- 3.
- P*INERTIAL > 0, the EG load is maintained at the P*EG power level.
3.2.3. Time Intervals in Which Power Gaps Occur
- Case Study 2—Verification in the MPP Area
- Subinterval 1:
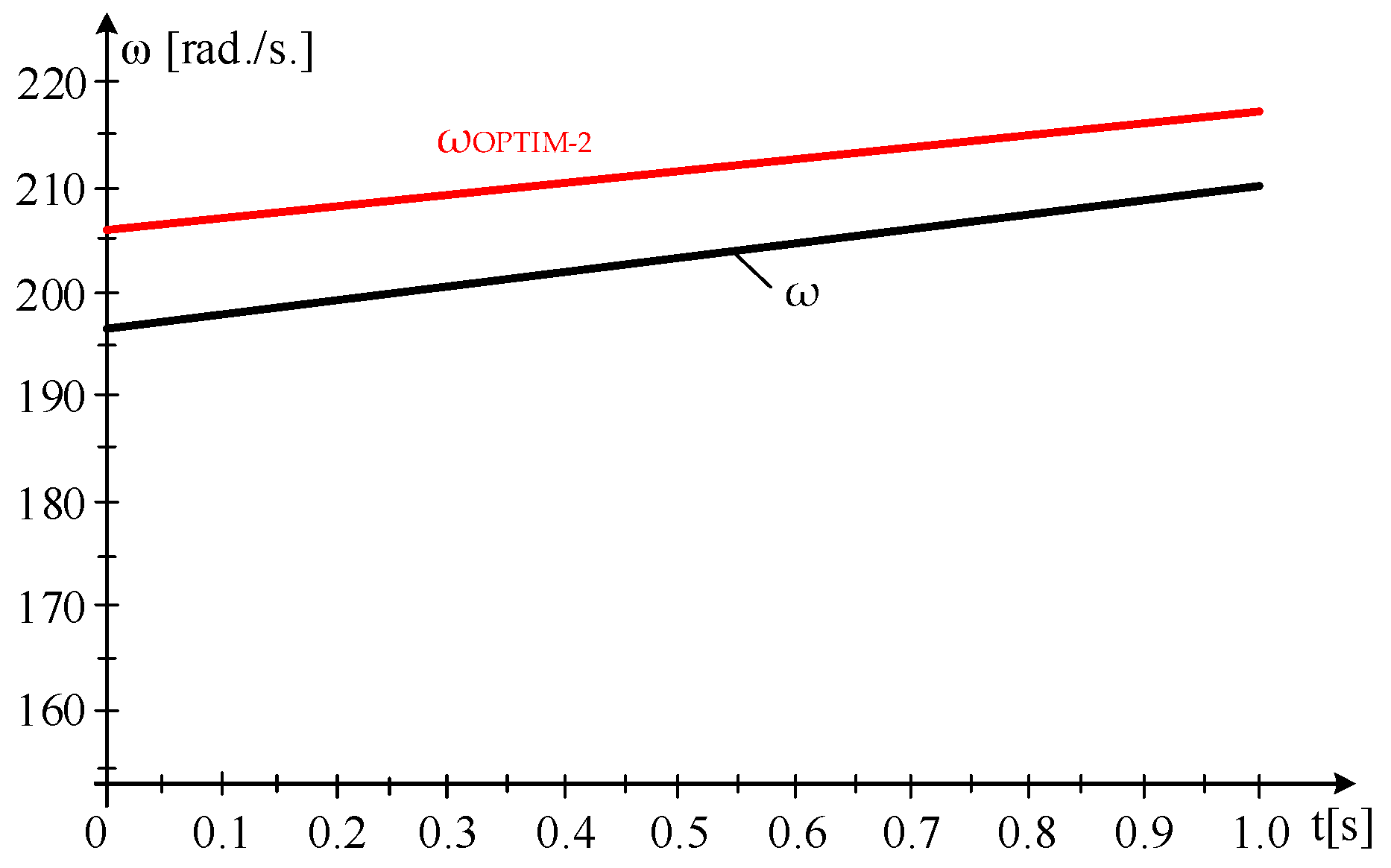
- Subinterval 2
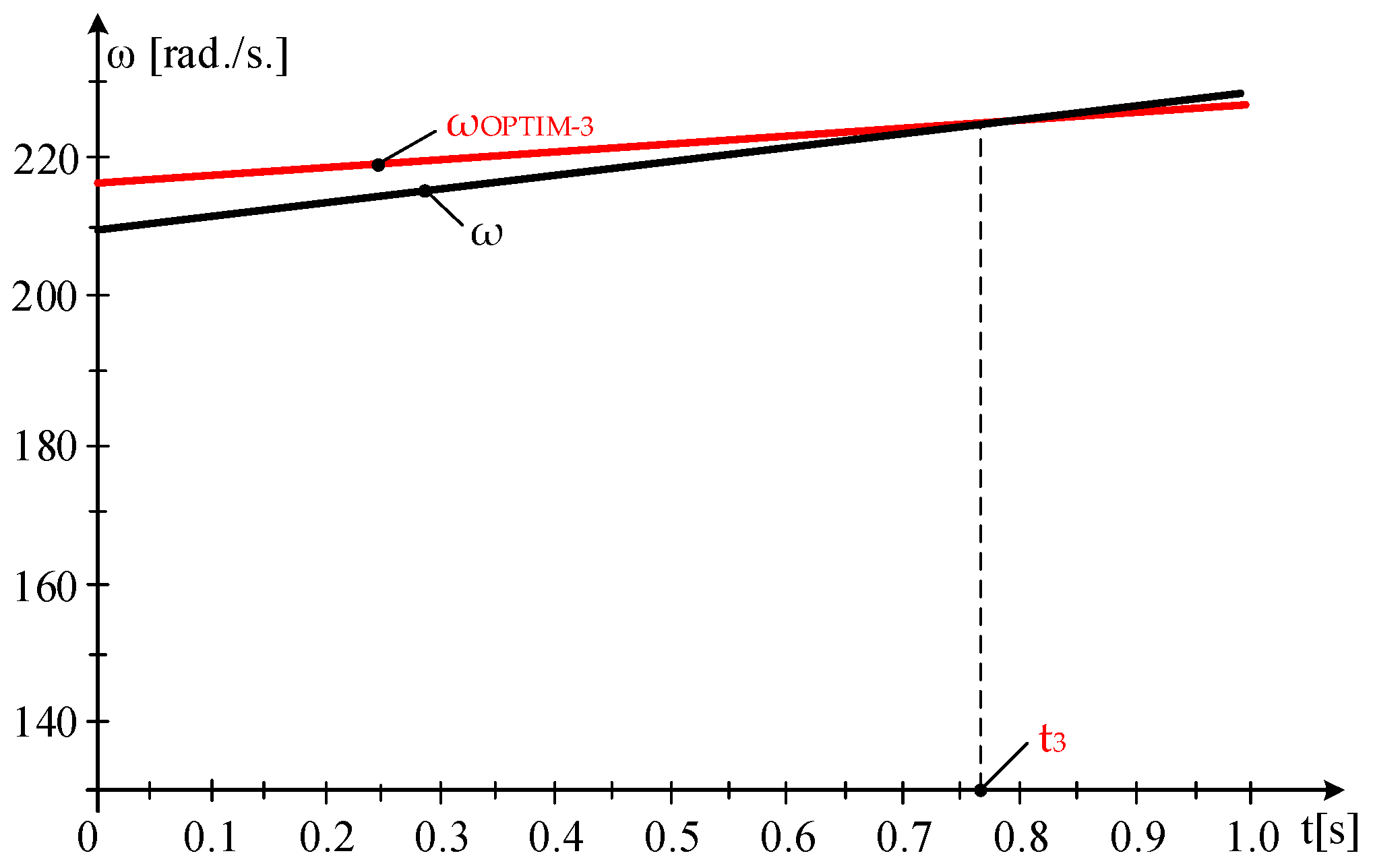
- Subinterval 3
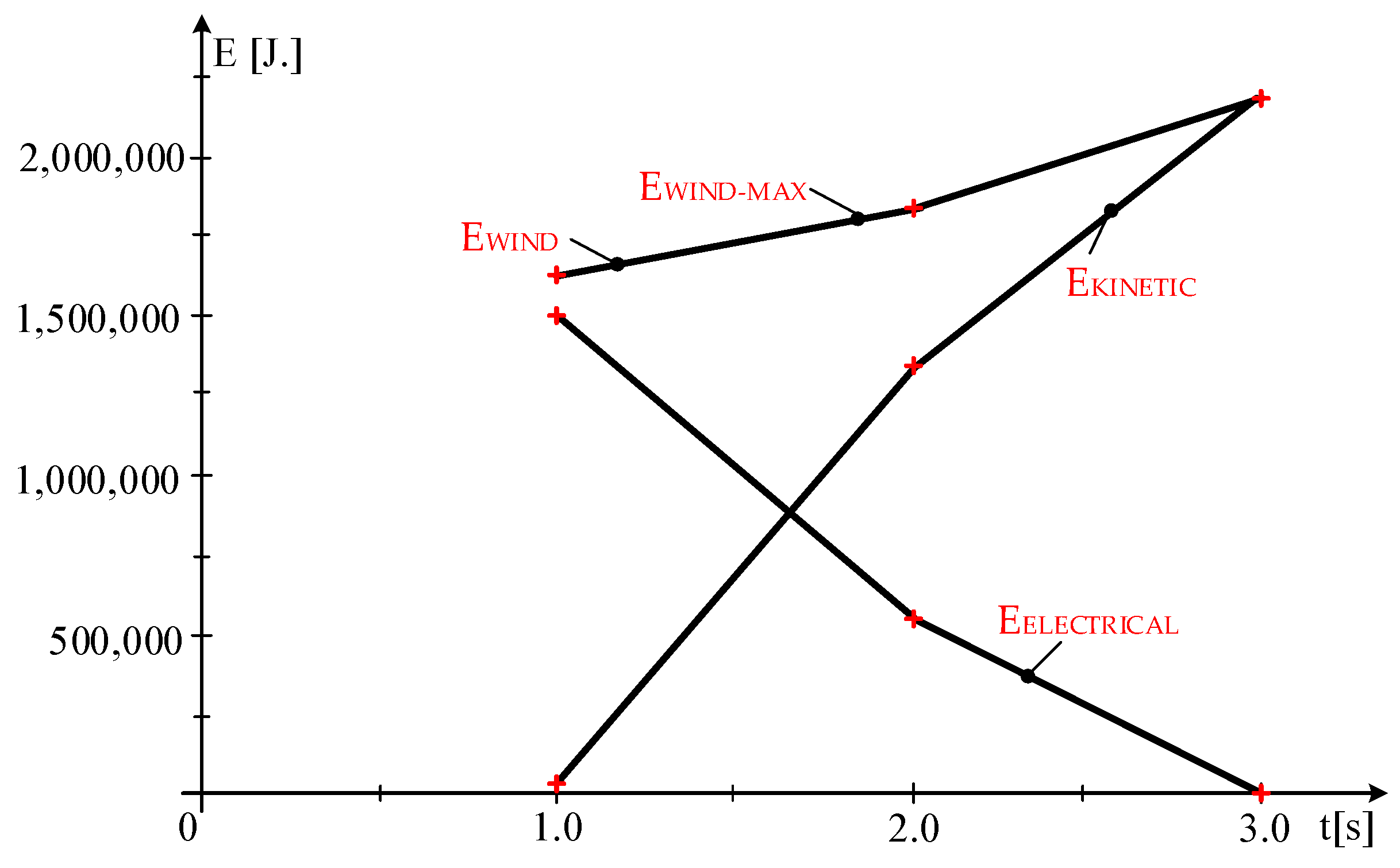
3.2.4. Energy Balance
- The values of the produced electrical energies, EELECTRICAL, decrease (the power to the generator diminishes).
- The variations of the kinetic energies, ΔEKINETIC, increase and compensate for the reduction of grid-injected electrical energies.
- The harnessed wind energy increases in direct proportion to the increase in wind speed.
3.2.5. Periods Characterized by Diminished Wind Speed
- Case Study 3—MPP Region Characterized by Diminishing Wind Velocity
- Subinterval 1:
- Subinterval 2
- Subinterval 3
- Subinterval 1:
- Subinterval 2:
- Subinterval 3:
- The values of electrical energy output, EELECTRICAL, increase even as wind speed decreases.
- The absolute differences in the values of the ΔEKINETIC kinetic energies, grow and counterbalance the decline in the values of the captured wind energies.
- The values of the harnessed wind energies diminish in direct proportion to the reduction in wind speed.
4. Discussion
- MM-WT was deduced, with experimental data.
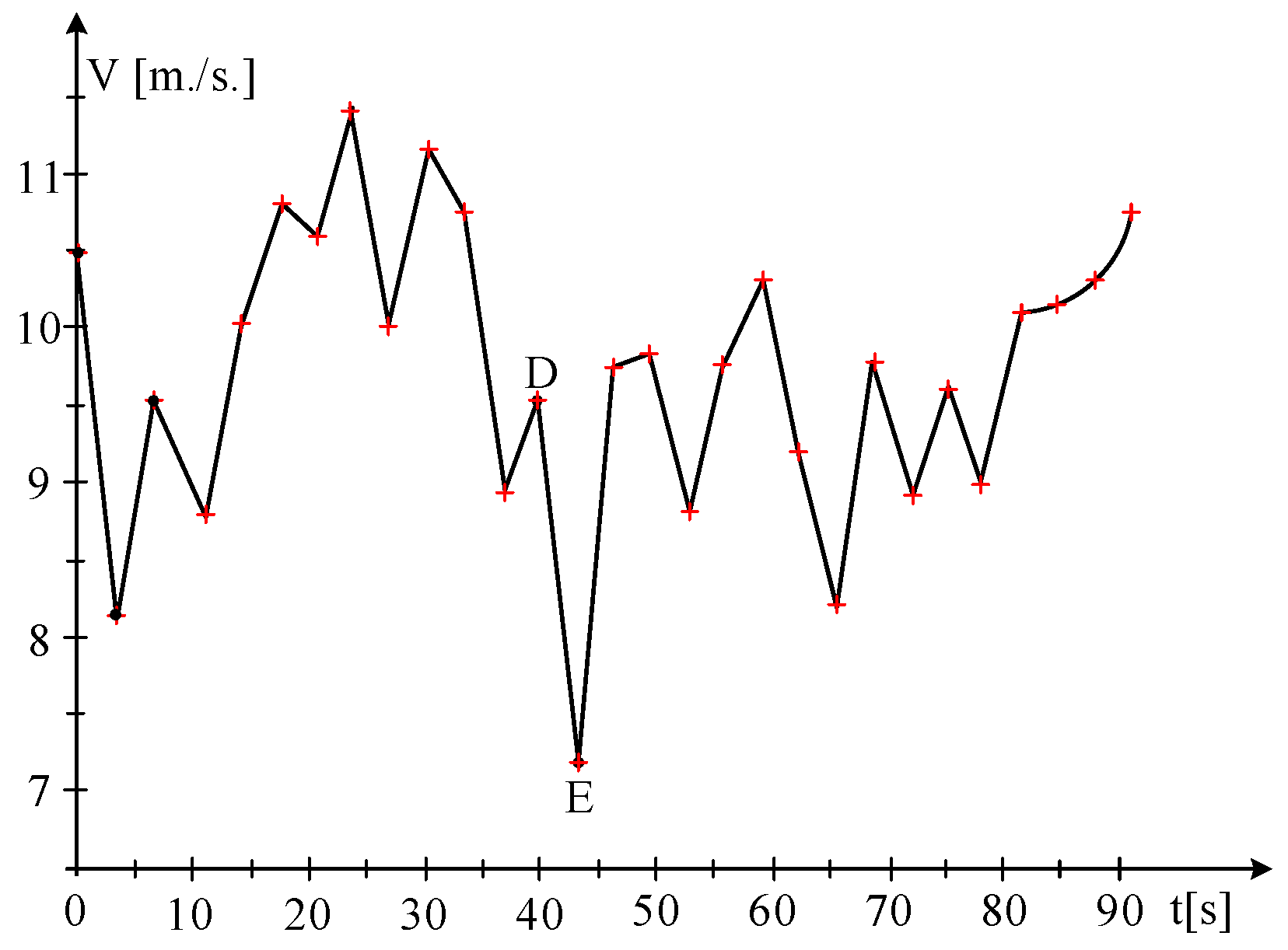
- The actual wind speed variation in the Dobrogea region was analyzed, and the motion equation was employed to visualize its operation within the optimal area.
- A method has been proposed to bring and maintain the turbine in its MPP.
- A control algorithm has been validated, which is based on the sign of the inertial power value, derived from experimental data including wind speed and mechanical angular speed.
- The time intervals in which power gaps occur have been analyzed.
- The periods during which wind speed diminishes were analyzed.
- The system is brought to the turbines MPP in the shortest possible time by either disconnecting the generator from the grid or by switching the engine to motor mode.
- By calculating the disparity between optimal MAS and present MAS, one can prescribe the power output of the generator.
- When the wind speed increases, gaps of power occur, leading to the disconnection of the generator from the grid, particularly when it is necessary to operate within the optimal energy efficiency range.
- As wind speeds diminish over time, power gaps do not occur; however, it is essential to function at MPP. The electrical power output in the system is higher than the power output of the turbine, with the excess power generated from the varying kinetic energies of the rotating masses.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| WT | wind turbine |
| MPP | maximum power point |
| MAS | mechanical angular speed |
| EG | electric generator |
| DFIG | double fed induction generator |
| POD | power oscillation damping |
| MM | mathematical model |
| J | equivalent inertia moment |
| V | wind speed |
| MWT | moment related to the shaft of the electric generator |
| MEG | electromagnetic torque at the electric generator |
| PN | rated power |
| PWT | WT power relative to the electric generator shaft |
| PWT-AVERAGE | average power value from the wind turbine |
| PEG | power of the electric generator |
| PINERTIAL | inertial power |
| H | electromechanical time constant |
| ω | mechanical angular speed |
| ωN | nominal mechanical angular speed |
| ωOPTIM | optimum angular speed |
| ωMAXIM | maximum angular speed |
| ωREAL | real angular speed |
| nOPTIM | optimum speed |
| Cp(λ) | power conversion coefficient |
| ρ | air density in the operating location |
| Rp | radius blades |
| EWIND | wind energy |
| EELECTRICAL | electrical energy delivered |
| ΔEKINETIC | kinetic energy of the rotating masses |
References
- Wind. Available online: https://www.iea.org/energy-system/renewables/wind (accessed on 19 March 2025).
- Sachin, G.; Shree, K.M.; Shivam, K.; Deepesh, A. A Consolidation Review of Major Wind Turbine Models in Global Market. In Proceedings of the 2020 International Conference on Power Electronics & IoT Applications in Renewable Energy and its Control (PARC), Mathura, India, 28–29 February 2020. [Google Scholar]
- Ketian, L.; Zhengxi, C.; Xiang, L.; Yi, G. Analysis and Control Parameters Optimization of Wind Turbines Participating in Power System Primary Frequency Regulation with the Consideration of Secondary Frequency Drop. Energies 2025, 18, 1317. [Google Scholar] [CrossRef]
- Rebello, E.; Watson, D.; Rodgers, M. Performance Analysis of a 10 MW Wind Farm in Providing Secondary Frequency Regulation: Experimental Aspects. IEEE Trans. Power Syst. 2019, 34, 3090–3097. [Google Scholar] [CrossRef]
- Huynh, P.; Tungare, S.; Banerjee, A. Maximum Power Point Tracking for Wind Turbine Using Integrated Generator-Rectifier Systems. IEEE Trans. Power. Electron. 2021, 36, 504–512. [Google Scholar] [CrossRef]
- Sorandaru, C.; Ancuti, M.-C.; Musuroi, S.; Svoboda, M.; Muller, V.; Erdodi, M.G. Fundamental Issue for Wind Power Systems Operating at Variable Wind Speeds: The Dependence of the Optimal Angular Speed on the Wind Speed. In Proceedings of the 2022 International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, 20–22 October 2022. [Google Scholar]
- Chioncel, C.P.; Spunei, E.; Tirian, G.-O. The Problem of Power Variations in Wind Turbines Operating under Variable Wind Speeds over Time and the Need for Wind Energy Storage Systems. Energies 2024, 17, 5079. [Google Scholar] [CrossRef]
- Karthik, R.; Hari, A.S.; Kumar, Y.V.P.; Pradeep, D.J. Modelling and Control Design for Variable Speed Wind Turbine Energy System. In Proceedings of the International Conference on Artificial Intelligence and Signal Processing (AISP), VIT AP Univ, Amaravati, India, 10–12 January 2020. [Google Scholar]
- Sorandaru, C.; Musuroi, S.; Frigura-Iliasa, F.M.; Vatau, D.; Dordescu, M. Analysis of the Wind System Operation in the Optimal Energetic Area at Variable Wind Speed over Time. Sustainability 2019, 11, 1249. [Google Scholar] [CrossRef]
- Deng, X.F.; Yang, J.; Sun, Y.; Song, D.R.; Yang, Y.G.; Joo, Y.H. An Effective Wind Speed Estimation Based Extended Optimal Torque Control for Maximum Wind Energy Capture. IEEE Access 2020, 8, 65959–65969. [Google Scholar] [CrossRef]
- Jakeer, H.; Mahesh, K.M. An Efficient Wind Speed Computation Method Using Sliding Mode Observers in Wind Energy Conversion System Control Applications. IEEE Trans. Ind. Appl. 2020, 56, 730–739. [Google Scholar]
- Jie, D.; Shuaizhi, C.; Linlin, P.; Yubao, L. A Wind Speed Prediction Method Based on Signal Decomposition Technology Deep Learning Model. Energies 2025, 18, 1136. [Google Scholar] [CrossRef]
- Yao, X.J.; Liu, Y.M.; Bao, J.Q.; Xing, Z.X. Research and Simulation of Direct Drive Wind Turbine VSCF Characteristic. In Proceedings of the IEEE International Conference on Automation and Logistics, Qingdao, China, 1–3 September 2008. [Google Scholar]
- Baala, Y.; Bri, S. DFIG-Based Wind Turbine Control Using High-Gain Observer. In Proceedings of the 2020 1st International Conference on Innovative Research in Applied Science, Engineering and Technology (IRASET), Meknes, Morocco, 16–19 April 2020. [Google Scholar]
- Yingyu, A.; Li, Y.; Zhang, J.; Wang, T.; Liu, C. Enhanced Frequency Regulation Strategy for Wind Turbines Based on Over-speed De-loading Control. In Proceedings of the 2020 5th Asia Conference on Power and Electrical Engineering (ACPEE), Chengdu, China, 4–7 June 2020. [Google Scholar]
- Fan, X.K.; Crisostomi, E.; Zhang, B.H.; Thomopulos, D. Rotor Speed Fluctuation Analysis for Rapid De-Loading of Variable Speed Wind Turbines. In Proceedings of the 20th IEEE Mediterranean Eletrotechnical Conference (IEEE MELECON), Electr Network, Palermo, Italy, 15–18 June 2020. [Google Scholar]
- Edrah, M.; Zhao, X.W.; Hung, W.; Qi, P.Y.; Marshall, B.; Karcanias, A.; Baloch, S. Effects of POD Control on a DFIG Wind Turbine Structural System. IEEE Trans. Energy Convers. 2020, 35, 765–774. [Google Scholar] [CrossRef]
- Shigeru, Y.; Yoh, Y.; Masahiro, M.; Shozo, S.; Kazuo, Y.; Nobuyuki, H.; Tomoyuki, S. Clarification of the mechanism of wind turbine blade damage taking lightning characteristics into consideration and relevant research project. In Proceedings of the International Conference on Lightning Protection (ICLP), Vienna, Austria, 2–7 September 2012. [Google Scholar]
- Ma, Y.; Zhang, L.; Yan, J.; Guo, Z.; Li, Q.; Fang, Z.; Siew, W.H. Inception mechanism of lighting upward leader form the wind turbine blade and a proposed critical length criterion. Proc. CSEE 2016, 36, 6042. [Google Scholar]
- Srinivasa Sudharsan, G.; Vishnupriyan, J.; Vijay Anand, K. Active flow control in Horizontal Axis Wind Turbine using PI-R controllers. In Proceedings of the 2020 6th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 6–7 March 2020. [Google Scholar]
- Carstea, C.; Butaru, F.; Ancuti, M.-C.; Musuroi, S.; Deacu, A.; Babaita, M. Wind Power Plants Operation at Variable Wind Speeds. In Proceedings of the 2020 IEEE 14th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 21–23 May 2020. [Google Scholar]
- El-Sharkawi, M.A. Dynamic equivalent models for wind power plants. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011. [Google Scholar]
- Chioncel, C.P.; Spunei, E.; Babescu, M. Limits of mathematical model used in wind turbine descriptions. In Proceedings of the 2016 International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, 20–22 October 2016. [Google Scholar]
- Chioncel, C.P.; Chioncel, P.; Gillich, N.; Nierhoff, T. Overview of Classic and Modern Wind Measurement Techniques, Basis of Wind Project Development. Analele Univ. Eftimie Murgu Resita 2016, 3, 73–80. [Google Scholar]
- Chioncel, C.P.; Spunei, E.; Tirian, G.O. Visualizing the Maximum Energy Zone of Wind Turbines Operating at Time-Varying Wind Speeds. Sustainability 2024, 16, 2659. [Google Scholar] [CrossRef]
- Samokhvalov, D.V.; Jaber, A.I.; Filippov, D.M.; Kazak, A.N.; Hasan, M.S. Research of Maximum Power Point Tracking Control for Wind Generator. In Proceedings of the 2020 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), St. Petersburg and Moscow, Russia, 27–30 January 2020. [Google Scholar]
- Dobrin, E.; Ancuti, M.-C.; Musuroi, S.; Sorandaru, C.; Ancuti, R.; Lazar, M.A. Dynamics of the Wind Power Plants at Small Wind Speeds. In Proceedings of the 2020 IEEE 14th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 21–23 May 2020. [Google Scholar]
- Monsson. Available online: https://www.monsson.eu/about-us/ (accessed on 6 November 2024).
- Babescu, M. Masina sincrona—Modelare—Identificare—Simulare; Publisher Polityehnica Timisoara: Temesvara, Romania, 2003; ISBN 973-625-021-0. [Google Scholar]
- Najih, Y.; Adar, M.; Aboulouard, A.; Khaouch, Z.; Bengourram, M.; Zekraoui, M. Mechatronic Control Model of a Novel Variable Speed Wind Turbine Concept with Power Splitting Drive Train: A Bond Graph Approach. In Proceedings of the 2020 IEEE 6th International Conference on Optimization and Applications (ICOA), Beni Mellal, Morocco, 20–21 April 2020. [Google Scholar]
- Seyfettin, V.; Fethi, B.G.; Ramazan, B.; Eklas, H. Design and Simulation of a Grid Connected Wind Turbine with Permanent Magnet Synchronous Generator. In Proceedings of the 2020 8th International Conference on Smart Grid (icSmartGrid), Paris, France, 17–19 June 2020. [Google Scholar]
- Available online: https://www.thewindpower.net/turbine_en_382_ge-energy_2.5-100.php (accessed on 15 April 2025).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Point | Time [s] | V [m/s] |
|---|---|---|
| A | 0 | 10.47 |
| B | 3.433 | 8.13 |
| C | 6.631 | 9.52 |
| Point | Time [s] | V [m/s] |
|---|---|---|
| 1.198 | 10.47 | |
| D | 39.858 | 9.52 |
| E | 43.073 | 7.142 |
| Subinterval | EWIND [J] | EWIND-MAX [J] | EELETRICAL [J] | EKINETIC [J] |
|---|---|---|---|---|
| 1 | 1.6236·106 | 1.6254·106 | 1.5008·106 | 1.2247·105 |
| 2 | 1.8883·106 | 1.8927·106 | 5.4954·105 | 1.3384·106 |
| 3 | 2.1869·106 | 2.1877·106 | 0 | 2.1871·106 |
| Subinterval | EWIND [J] | EWIND-MAX [J] | EELETRICAL [J] | EKINETIC [J] |
|---|---|---|---|---|
| 1 | 2.1382·106 | 2.1434·106 | 2.4096·106 | −2.7166·105 |
| 2 | 1.6549·106 | 1.6656·106 | 4.1385·106 | −2.4835·106 |
| 3 | 1.2619·106 | 1.2647·106 | 5.224·106 | −3.9624·106 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chioncel, C.P.; Ciucurita, S.; Spunei, E. Control of Wind-Power Systems Operating at Variable Wind Speeds to Optimize Energy Capture. Energies 2025, 18, 2574. https://doi.org/10.3390/en18102574
Chioncel CP, Ciucurita S, Spunei E. Control of Wind-Power Systems Operating at Variable Wind Speeds to Optimize Energy Capture. Energies. 2025; 18(10):2574. https://doi.org/10.3390/en18102574
Chicago/Turabian StyleChioncel, Cristian Paul, Samuel Ciucurita, and Elisabeta Spunei. 2025. "Control of Wind-Power Systems Operating at Variable Wind Speeds to Optimize Energy Capture" Energies 18, no. 10: 2574. https://doi.org/10.3390/en18102574
APA StyleChioncel, C. P., Ciucurita, S., & Spunei, E. (2025). Control of Wind-Power Systems Operating at Variable Wind Speeds to Optimize Energy Capture. Energies, 18(10), 2574. https://doi.org/10.3390/en18102574